Chapitre III
Les types de la commande
Introduction :
Les réseaux de neurones artificiels ont trouvé
une large utilisation dans le domaine de la commande des systèmes non
linéaires. Ceci est d à leur propriété
d'approximation universelle qui les rend capables d'approximer, avec un
degré de précision arbitraire fixé, n'importe quelle
fonction non linéaire. Les réseaux à base de perceptrons
multicouches, (Multi Layer Perceptrons), MLP, et les fonctions radiales de base
RBF, sont les plus utilisés. Les premières applications des
réseaux de neurones en commande n'étaient pas basées sur
des analyses de stabilité rigoureuses. En général, la loi
de commande est exprimée en fonction des non linéarités du
modèle du système suivant la méthode de
linéarisation entrée-sortie. Les réseaux de neurones sont
ensuite utilisés soit pour approcher directement la loi de commande soit
pour approcher les non Linéarités formant ainsi une loi de
commande neuronale adaptative. Le modèle non Linéaire
utilisé dans ces études satisfait les conditions de
linéarisation entrée sortie. Dans tous ces travaux, le signal
erreur utilisé pour l'apprentissage dans les lois d'adaptations est
basé sur l'erreur de poursuite. Dans ce mémoire, une structure de
commande neuronale avec des lois d'adaptation basée sur le signal erreur
de commande est étudiée. Dans ce cas la fonction à
optimiser dépend alors directement des poids.
III.1.COMMANDE DE PROCESSUS :
L'utilisation des réseaux de neurones pour la commande
(adaptative ou non) de processus non linéaires découle
naturellement des aptitudes de ces derniers à la modélisation. Il
s'agit essentiellement d'une extension non linéaire de la commande
optimale avec coût quadratique sur un horizon infini. Considérons
en effet une structure de commande typique (la commande avec modèle
interne) représentée Sur la Figure III.1.
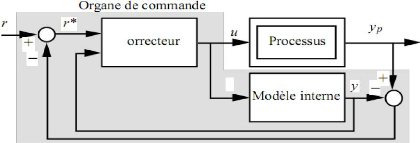
Figure .III.1.Exemple d'architecture pour la
commande neuronale robuste.
Elle comprend :
> Un modèle neuronal, obtenu comme indiqué au
paragraphe précédent
> Un correcteur neuronal dont les coefficients sont mis
à jour périodiquement si la commande est adaptative ; dans le cas
contraire, ses coefficients sont fixes une fois l'apprentissage
terminé.
Pour l'apprentissage de systèmes de poursuite, il est
nécessaire de surcroît d'utiliser un modèle de
référence qui traduit le cahier des charges en termes de
dynamique de poursuite désirée. La commande de processus non
linéaires semble être l'un des domaines les plus prometteurs pour
es réseaux de neurones à l'heure actuelle. Les comparaisons entre
commandes "neuronales" (faisant intervenir des connaissances a priori sur le
processus) et commandes non linéaires redditionnelles ont montré
que les réseaux de neurones permettent d'obtenir des résultats au
moins aussi bons, et souvent meilleurs, mais surtout qu'ils sont de mise en
oeuvre beaucoup plus simple en raison du caractère
générique des algorithmes mis en oeuvre : quelle que soit
l'architecture du réseau bouclé utilisé, c'est toujours le
mrme algorithme qui est mis en oeuvre.
| 

