Conclusion :
Dans ce chapitre nous considérons le problème de
l'identification et modélisation des systèmes non
linéaires .L'objectif est de construire un modèle pour le
système à identifier e nous avons présentées la
relation entre la modélisation et l'identification.
Chapitre II
Les Réseaux de neurones
Introduction :
L'un des défis de l'homme aujourd'hui est de copier la
nature et de reproduire des modes de raisonnement et de comportement qui lui
sont propre. Les réseaux de neurones, sont nés de
cette envie ils constituent une famille de fonctions non
linéaires paramétrées, utilisées dans de nombreux
domaines (physique, chimie, biologie, finance, etc.), notamment pour la
modélisation de processus et la synthèse de lois de commandes,
leur application dans le domaine de l'électronique est assez
récente.
Ce chapitre décrit une technique intelligente nouvellement
introduite dans le monde de
l'électronique. Il s'agit principalement des
réseaux de neurones artificiels et les différentes structures qui
leurs sont associées ainsi que nous abordons par la suite
l'identification et le contrôle de processus par les réseaux de
neurones pour la synthèse de lois de commandes.
II.1.Les neurones artificiels :
Les réseaux de neurones biologiques réalisent
facilement un certain nombre d'applications
telles que la reconnaissance des formes, le traitement de
signal, l'apprentissage par l'exemple la mémorisation et la
généralisation. Ces applications sont pourtant, malgré
tout les efforts déployés en algorithmique et en intelligence
artificielle, à la limite des possibilités actuelles .C'est
à partir de l'hypothèse que le comportement intelligent
émerge de la structure et du comportement des éléments de
base du cerveau que les réseaux de neurones artificiels se
sont développes. Les réseaux de neurones
artificiels sont des modèles, à ce titre ils peuvent
être
décrits par leurs composants, leurs variables descriptives
et les interactions des composants.
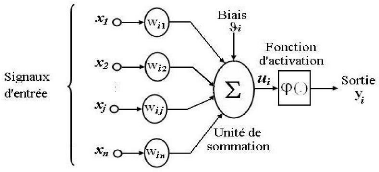
Figure II.1. Le modèle d'un neurone
artificiel.

Chaque neurone artificiel est un processeur
élémentaire, il reçoit un nombre de variable
d'entrées en provenance de neurones amont. A chacune de ces
entrées est associé un poids (W) abréviation de poids
représentatif de la force de connexion. Chaque processeur
élémentaire est dote d'une sortie unique, qui se ramifie ensuite
pour alimenter un nombre variable de neurones avals. A chaque connexion est
associé un poids synaptique. Cette structure élémentaire
est appelée perceptron [2].
II.2. Fonctions d'activation :
Cette fonction permet de définir l'état interne du
neurone en fonction de son entré totale, Citons à titre d'exemple
quelques fonctions souvent utilisées [11].
II.2.1. Fonction binaire a seuil :
Fonction Heaviside (figure II.2) définie
par :
f1, x> 0
h(x) =10, sinon (II.1)
Fonction Signe (figure II.3) définie par
:
(+1, x > 0
sgr(x) = t-1, sinon (II.2)






Le seuil introduit une non-linéarité dans le
comportement du neurone, cependant il limite la gamme des réponses
possibles à deux valeurs [11].
| 

