
MAS avec découplage des axes
d et q
111.7- Régulation
Le contrôle des grandeurs flux et couple
de la machine passe par l'asservissement de la dynamique des courants
statoriques Isd et Isq
à l'aide des tensions de commande Vsd et
Vsq qui leur sont liées ainsi
qu'à la pulsationcos .
111.7.1- Régulation des courants
A partir de la figure précédente, on aboutit
à un schéma bloc simple pour chacun des deux axes : Ce qui
correspond à la boucle de régulation de chacun des courants
Isd et Isq .

Figure 1-8 : Boucles de régulation des
courants Isd et
Isq
111.7.2- Régulation et asservissement de la
vitesse
La chaîne de contrôle de la vitesse peut être
représentée par le schéma fonctionnel ci-dessous :
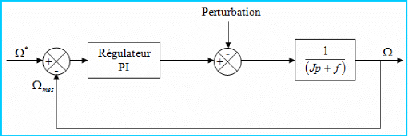
Figure 1-9 : Contrôle de la vitesse
mécanique
Ces régulateurs (de courant et de vitesse) qui sont
simplement des correcteurs PI (Proportionnel et Intégral) seront
synthétisés en continu et en discret dans les chapitres
respectifs de simulation et d'expérimentation.
Le choix des régulateurs PI est ici justifié
par sa simplicité de mise en oeuvre. Ce qui simplifie
considérablement et avantageusement le problème car les
régulateurs PID (Proportionnel, Intégral et Dérivé)
bien que permettant d'anticiper et d'accélérer la
régulation, ne conviennent pas car sont très sensibles aux bruits
et donc amplifient beaucoup ceux-ci [9].
Tous les détails de calcul de ces correcteurs en continu
et en discret seront faites dans les chapitres correspondants.
On aboutit donc à un schéma de commande
vectorielle indirecte avec régulation des courants sur les deux axes
correspondant respectivement au flux et au couple de la machine. La commande
est dite indirecte (commande en boucle ouverte) car
il n'y a pas de boucle directe de régulation de flux.
Ce schéma peut être par la suite
complété par une boucle de régulation de position ou de
vitesse comme nous le verrons par la suite.

Figure 1-10 : Schéma de la comman de
vectorielle in directe avec régulation de courant
[14]
| 

