Chapitre III : Modélisation booléenne des
règles d'association - 45 -
Chaque cellule au temps t+1 ne dépend que de
l'état des ses voisines et du sien au temps t. Dans chaque
couche, le contenu d'une cellule détermine si et comment elle participe
à chaque étape d'inférence : à chaque étape,
une cellule peut être active (1) ou passive (0), c'est-à-dire
participe ou non à l'inférence.
Atmani et Beldjilali (2007) ont supposés qu'il y a
l cellules dans la couche CELFAIT, et r cellules
dans la couche CELREGLE. Toute cellule i de la
première couche CELFAIT est considérée comme fait
établi si sa valeur est 1, sinon, elle est considérée
comme fait à établir. Toute cellule j de la
deuxième couche CELREGLE est considérée comme une
règle candidate si sa valeur est 1, sinon, elle est
considérée comme une règle qui ne doit pas participer
à l'inférence.
Les états des cellules se composent de trois parties :
EF, IF et SF, respectivement ER, IR
et SR, sont l'entrée, l'état interne et la sortie
d'une cellule de CELFAIT, respectivement d'une cellule de
CELREGLE. L'état interne, IF d'une cellule de
CELFAIT indique le rôle du fait : dans le cas d'un graphe
d'induction IF = 0 correspond à un fait du type sommet (si),
IF = 1 correspond à un fait du type attribut=valeur
(Xi = valeur). Pour une cellule de CELREGLE, l'état
interne IR peut être utilisé comme coefficient de
probabilité que nous n'aborderons pas dans ce mémoire.
Pour illustrer l'architecture et le principe de fonctionnement
du module CIE, coeur du système BRI, nous
considérons la partie du graphe, extraite de l'article Benamina et
Atmani (2008), obtenue en utilisant les partitions So = {so}, S1 = {s1, s2} et
S2 = {s3, s4, s5} (voir Figure 3.2).
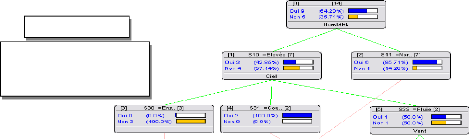
R1: Si so alors (X3 = Elevée) et s1
R2: Si so alors (X3 = Normale) et s2
R3: Si s1 alors (X1 = Soleil) et s3
R4: Si s1 alors (X1 = Couvert) et s4
R5: Si s1 alors (X1 = Pluie) et s5
Base de connaissances
Figure 3.2. Les partitions So, S1 et
S2.
Le Tableau 3.1 montre comment la base de connaissance
extraite à partir de ce graphe d'induction est représentée
par les couches CELFAIT et CELREGLE. Initialement, toutes les
entrées des cellules dans la couche CELFAIT sont passives
(EF = 0), exceptées celles qui représentent la base des
faits initiale (EF(1) = 1).
Les matrices d'incidence RE et Rs représentent la
relation entrée/sortie des Faits et sont utilisées en
chaînage avant. On peut également utiliser Rs comme
relation d'entrée et RE comme relation de
Chapitre III : Modélisation booléenne des
règles d'association - 46 -
sortie pour lancer une inférence en chaînage
arrière. Notez qu'aucune cellule du voisinage d'une cellule qui
appartient à CELFAIT (respectivement à
CELREGLE) n'appartient pas à la couche CELFAIT
(respectivement à CELREGLE).
R1
R2
R3
R4
R5
CELREGLE (Règles)
ER
0
0
0
0
0
IR
1
1
1
1
1
SR
1
1
1
1
1
CELFAIT( Faits)
|
|
EF
|
IF
|
SF
|
|
so
|
1
|
0
|
0
|
|
X3 = Elevée
|
0
|
1
|
0
|
|
s1
|
0
|
0
|
0
|
|
X3 = Normale
|
0
|
1
|
0
|
|
s2
|
0
|
0
|
0
|
|
X1 = Soleil
|
0
|
1
|
0
|
|
s3
|
0
|
0
|
0
|
|
X1 = Couvert
|
0
|
1
|
0
|
|
s4
|
0
|
0
|
0
|
|
X1 = Pluie
|
0
|
1
|
0
|
|
s5
|
0
|
0
|
0
|
|
|
Tableau 3.1 : Représentation Cellulaire de la base
de connaissances de la Figure 3.2.
Le voisinage est introduit par la notion de matrice
d'incidence. Dans le Tableau 3.2 sont respectivement
représentées les matrices d'incidence d'entrée RE
et de sortie Rs de l'automate cellulaire. La relation d'entrée,
notée iREj, est formulée comme suit : Vi E
[1,1], Vj E [1, r], si (le Fait i E à la
Prémisse de la règle j) alors RE(i, j) - 1. De
même la relation de sortie, notée iRsj, est
formulée comme suit : Vi E [1,1], Vj E [1, r], si (le
Fait i E à la Conclusion de la règle j) alors
Rs(i, j) - 1.
|
RE
|
R1
|
R2
|
R3
|
R4
|
R5
|
|
so
|
1
|
1
|
|
|
|
|
X3 = Elevée
|
|
|
|
|
|
|
s1
|
|
|
1
|
1
|
1
|
|
X3 = Normale
|
|
|
|
|
|
|
s2
|
|
|
|
|
|
|
X1 = Soleil
|
|
|
|
|
|
|
s3
|
|
|
|
|
|
|
X1 = Couvert
|
|
|
|
|
|
|
s4
|
|
|
|
|
|
|
X1 = Pluie
|
|
|
|
|
|
|
s5
|
|
|
|
|
|
|
Rs
|
R1
|
R2
|
R3
|
R4
|
R5
|
|
so
|
|
|
|
|
|
|
X3 = Elevée
|
1
|
|
|
|
|
|
s1
|
1
|
|
|
|
|
|
X3 = Normale
|
|
1
|
|
|
|
|
s2
|
|
1
|
|
|
|
|
X1 = Soleil
|
|
|
1
|
|
|
|
s3
|
|
|
1
|
|
|
|
X1 = Couvert
|
|
|
|
1
|
|
|
s4
|
|
|
|
1
|
|
|
X1 = Pluie
|
|
|
|
|
1
|
|
s5
|
|
|
|
|
1
|
Tableau 3.2 : Les matrices d'incidences d'Entrée RE
et de sortie Rs pour la Figure 3.2.
Pour définir la dynamique du CIE, nous allons
rappeler que le cycle de base d'un moteur d'inférence, pour
établir un fait F en chaînage avant, fonctionne
traditionnellement comme suit :
· Recherche des règles applicables
(évaluation et sélection) ;
· Choisir une parmi ces règles, par exemple R
(filtrage) ;
· Appliquer et ajouter la partie conclusion de R à
la base des faits (exécution).
Le cycle est répété jusqu'à ce
que le fait F soit ajouté à la base des faits, ou s'arrête
lorsqu'aucune règle n'est applicable.
| 

