Chapitre V : Test et simulation de
la Commande du tracker
1. Introduction
Cette dernière étape est consacrée
à l'implémentation matérielle, tests et simulations de la
technique adoptée dans cette étude, c'est la partie
électronique qui va assurer la commande de tout le système. Pour
ce faire, il est indispensable d'identifier la technologie choisie ainsi que
les blocs qui seront utilisés (Figure V. 1). Notre choix s'est
porté sur l'utilisation du microcontrôleur PIC comme un circuit
intégré pour l'exécution du programme qui seront traduits
en langage C, bien que d'autres cartes puissent être utilisées
aussi. Une présentation de l'environnement logiciel est
éventuellement décrite dans ce chapitre, expliquant la
procédure adoptée pour une simulation en temps réel de ce
projet et la description de la réalisation d'une carte de commande du
tracker solaire.

Fig. V. 1 Carte de commande d'un tracker solaire.
2. Contexte logiciel
Les microcontrôleurs sont aujourd'hui implantés
dans la plupart des grandes applications publiques ou professionnelles, il en
existe plusieurs familles. La société Américaine Micro
chip Technologie a mis au point dans les années 90 un
microcontrôleur : le PIC (Peripheral
Interface Contrôler). Ce composant encore
très utilisé à l'heure actuelle est un compromis entre
simplicité d'emploi, rapidité et prix de revient.
Dans notre cas on a utilisé le microcontrôleur
PIC 18F458 programmé avec le langage mikroC, Le mikroC est un
compilateur C complet pour PIC de Microchip. Le code source est simulé
via PROTEUS.
La figure V. 2 représente la méthodologie suivie
pour la simulation de la carte de
commande.
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. V. 2 Cheminement de la programmation et de la
simulation [1].
3. Écriture du programme
On peut distinguer deux parties dans le programme
rédigé avec mikroC le premier consiste à la commande
scalaire du moteur le deuxième programme permet de calculer la position
solaire et orienter le moteur a cette position.
? Description de l'algorithme
Dans cette stratégie et à partir des
données enregistrées au préalables le
microcontrôleur lit les variables suivantes : les données du lieu
géographique, la latitude et la longitude, la date actuelle, l'horloge
en temps réel (RTC : Real Time Clock) et les positions des angles
(élévation et azimutale du panneau : détectés via
les capteurs de position p1, p2), comme il est montré dans (chapitre 4,
la partie 3.1 ) (Méthode pour calculer la position du soleil) .puis, le
microcontrôleur calcule les paramètres et les angles suivants
:l'angle horaire, et l'angle altitude, azimut, plus Heure de lever et de
coucher.
Après avoir terminé le calcul, le
système se déplace vers l'Est si la condition (abs (p1-az) >1
et p1> azimut) est vérifiée sinon (p1< azimut) vers l'Ouest
sinon il s'arrête (la position azimutale est détectée) et
la même chose la méthode est identique pour le deuxième
moteur d'élévation avec la condition (abs (p2-altitude) > 1et
p2> altitude). Si l'horloge atteint l'heure du coucher, le système se
déplace automatiquement vers la position prévue pour l'heure du
lever le jour prochain et s'arrête pour recommencer de nouveau.
4. Description du HARDWARE
Après avoir réalisé les études
précédentes, on a pu construire un schéma de principe sur
lequel on va se baser pour réaliser la carte de contrôle.
4.1. Réalisation de la commande de l'onduleur 4.1.1.
Schéma de principe
La figure V. 3 montre le circuit de commande d'un onduleur
triphasé. Il se compose
d'une mémoire tampon (BC547 et 2N3019), d'un
opto-isolateur, d'un amplificateur Darlington et d'un driver MOSFET.
Tracker Solaire Page 61
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. V. 3 Circuit de commande d'un onduleur
triphasé. L'élément de base du montage est le
microcontrôleur PIC 18F458.
4.1.2. Circuit de l'onduleur
La figure V. 4 présente l'onduleur triphasé, il
se compose de six MOSFET connectés en trois membres. Il convertit la
liaison continue d'entrée en une tension alternative triphasée
correspondante. Le circuit de microcontrôleur et de commande de grille
sert à contrôler le temps de marche / arrêt (signal PWM) des
MOSFET dans une séquence particulière. La séquence de
conduite des MOSFET est de 1-5, 2-6, 3-4 et répétée. Dans
cette séquence de MOSFET conducteurs, chaque paire de MOSFET conduit
après chaque 120° [26] [27].
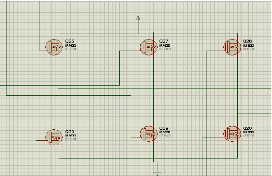
Fig. V. 4 L'onduleur triphasé avec trois
bras.
4.1.3. Gâte drives
circuit
Les signaux PWM sont utilisés pour contrôler la
vitesse du moteur. Ils sont générés par le
microcontrôleur. Ces impulsions sont données au
circuit de commande. Ce dernier fournit les signaux de grille pour
déclencher les MOSFET qui entraînent le moteur à induction
triphasé.
Tracker Solaire Page 62
Tracker Solaire Page 63
Chapitre II : Gisement solaire et le générateur
photovoltaïque
a) Circuit tampon (BC547 et 2N3019)
L'impulsion PWM générée par le
microcontrôleur PIC n'est pas capable de commander

l'opto-isolateur. Pour sur monter ce problème, le
circuit tampon est utilisé comme le montre la figure V. 5
[27].
Fig. V. 5 La structure du circuit tampon (BC547 et
2N3019).
b) Opto-isolateurs (MCT2E)
La figure V. 6 présente la structure de l'opto-isolateur.
C'est la combinaison de la diode
électroluminescente IR LED et NPN phototransistor. La
fonction principale de l'opto-isolateur est d'isoler les circuits de puissance
des circuits de commande [26] [27].
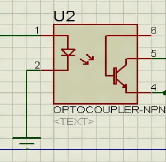
Fig. V. 6 La structure de l'opto-isolateur.
Le circuit tampon alimente le signal d'entrée de la
diode électroluminescente. La LED conduit et émet la
lumière qui attaque le phototransistor conduit.
c) Darlington pair Amplifier (TIP122)
Le TIP122 est un transistor de puissance NPN de pair
Darlington évalué comme 100V, 5A ayant un gain de plus de 1000
avec une dissipation de puissance de 50W. Il est destiné à
être utilisé dans des applications électriques,
linéaires et de commutation [26][27].
Le TIP122 est un transistor de puissance NPN de pair de
Darlington, classé comme 100V, 5A ayant un gain de 1000 avec une
dissipation de puissance de 50W. Le circuit amplificateur Darlington est
illustré sur la figure V. 7 suivante.
Tracker Solaire Page 64
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. V. 7 La structure de Darlington pair amplifiée
(TIP122).
d) IR 2112
IR2110 est un MOSFET haute tension et haute vitesse
conductrice avec sortie côté gauche et côté gauche
indépendant canaux de tension (FigureV.8). Il est capable de
contrôler deux entrées en même temps et produit des
impulsions de sortie latérales élevées et secondaires. Les
entrées logiques sont compatibles avec une logique de 3,3 V. la fonction
de pilote de sortie dispose d'un stade de tampon de courant à impulsions
élevées conçu pour une section minimale du
conducteur[26] [27].
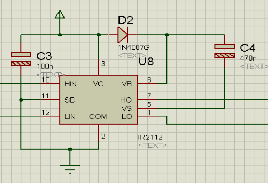
Fig. V. 8 Connexion d'IR2112.
| 

