3.2.4. Modèle de Capteur
? Dispositifs de sous-système de détection de
mouvement : encodeurs d'arbres linéaires ou rotatifs, capteurs
d'inclinaison, inclinomètres, photodiodes, résistances
photosensibles pour surveiller la position actuelle du plat pendant qu'il se
déplace jusqu'à la position désirée [18].
? Interrupteurs de fin de course : Dispositifs pour
empêcher un mouvement mécanique au-delà des limites
prédéfinies afin d'éviter les dommages au tracker ou au
câble [18].
? Dispositifs de détection ambiante environnementaux ou
atmosphériques : détection de l'intensité lumineuse,
solormètre, pyranomètre, capteur d'anémomètre /
vent, capteur de température ambiante, capteur d'humidité et
capteurs de pression atmosphérique pour détecter tout risque
environnemental ou menaçant pour l'environnement.
a) Connaître la position des modules
? La matrice (tableau 3) de choix pour la position des modules
(suivant l'élévation):
Tableau 4 : La comparaison entre les différents
capteurs de position [19].
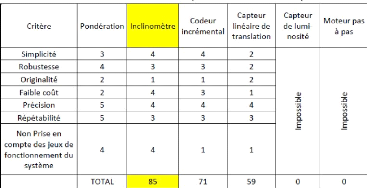
Les critères de répétabilité et de
précision sont très importants. En effet, on veut que notre
capteur soit précis et que la mesure soit repérable
(c'est-à-dire que l'on obtient toujours la même valeur).
La solution retenue pour l'élévation est un
inclinomètre. Ce capteur est très avantageux, car il permet de
mesurer directement l'élévation du panneau ce qui permet
d'atteindre de hautes précisions et de s'affranchir des défauts
de montage contrairement à une mesure indirecte qui doit prendre en
compte les jeux de fonctionnements (Figure IV. 11).

Fig. IV. 11 Élévation mesurée avec notre
inclinomètre [19]. ? Matrice de choix pour l'azimut
| 

