Conception et realisation d'un système embarque pour l'ouverture dune porte automatiquepar VIctor Tychique ZAMVUATA KIMANIMOKO ISIPA - Graduat 2021 |

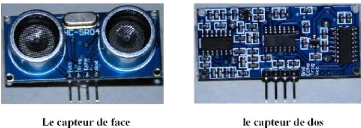
III.4.4. Capteur UltrasonLe processus complet est le suivant: Mettre le pin "TRIG" une impulsion de niveau haut (5V) durant au moins 10us et le module démarre sa lecture; A la fin de la mesure, s'il détecte un objet devant lui, le pin "ECHO" passe au niveau haut (5V). Et, la distance où se situe l'obstacle est proportionnelle à la durée de cette impulsion31.
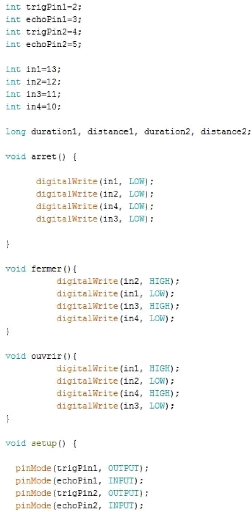
Fig. III.5 : Capteur Ultrason HC-SR04 30 https://fr.wikipedia.org/wiki/Lève_vitre. Consulté le 11/10/2021 à 19h45'. 31 MOUSSAOUI Amira, Conception et Réalisation d'un Bras Manipulateur Commandé par l'Arduino Méga 2560, Mémoire, Université M'hamed Bougara de Boumerdes, 2016-2017. 41 III.5. REALISATION DE LA PORTE AUTOMATIQUE III.5.1. ProgrammeC'est la description fonctionnelle du nouveau système ; c'est un ensemble des procédures opératoires propres à un enchainement des actions nécessaires à l'accomplissement d'une tache. Dans notre réalisation nous avons utilisé le langage de programmation en C. III.5.1.1. Les mots-clefs du langage CUn certain nombre de mots, appelés mots-clefs, sont réservés pour le langage lui-même et ne peuvent pas être utilisés comme identificateurs. Le langage C compte 32 mots clefs : (auto ; const ; double ; float ; int ; short ; struct ; unsigned ; break ; continue ; else ; for ; long ; signed, switch ; void ; case ; default ; enum ; goto ; register ; sizeof ; typedef ; volatile ; char ; do ; extern ; if ; return ; static ; union ; while). Nous pouvons les classées en cinq catégories. y' Les spécificateurs de stockage : auto ; register ; static ; extern ; typedef. y' Les spécificateurs de type : char ; double ; enum ; float ; int ; long ; short ; signed ; struct ; union ; unsigned ; void. y' Les qualificateurs de type : const ; volatile. y' Les instructions de controls : break ; case ; continue ; default ; do; else ; for ; goto ; if ; switch ; while. y' Divers : return ; sizeof. 42 III.5.1.2. Code source avec le logiciel Arduino
43
Fig. IÉI.6 : Programme complet du système réalisé 44 III.5. SCHEMA SYNOPTIQUE DU SYSTEME REALISE
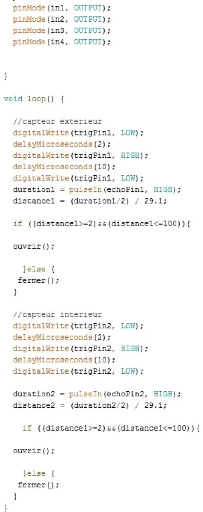
Capteur présences Arduino UNO Énergie 5v Moteurs Pont en H Énergie 12v Fig. 111.7 : Schéma synoptique du système réalisé III.6. SCHEMA DE REALISATION
Fig. 111.8 : Schéma réalisé 45 III.7. FONCTIONNEMENT DE LA PORTE AUTOMATIQUEAu démarrage du système ce sont des capteurs de présence qui entre enjeux, lorsqu'il détecte la présence, il envoi l'information au microcontrôleur, à son tour il donne le consigne au circuit intégré qui est le pont en H permet de réaliser 2 fonctions qui sont d'inverser le sens de rotation du moteur en inversant le courant aux bornes du moteur et la variation de la vitesse du moteur en modulant la tension aux bornes du moteur. De plus, le pont en H permet d'effectuer un freinage magnétique s'il est capable d'en dissiper la puissance générée. Cette opération s'effectue en actionnant soit les deux commutateurs supérieurs ou inférieurs en même temps, ce qui court-circuite les bornes du moteur, et le fait par conséquent freiner. |
|