Conclusion générale et perspectives
Au cours de ce projet de fin d'étude j'ai
découvert deux branches scientifiques trop important dans le domaine de
l'industrie qui sont l'électricité industrielle et l'automatisme.
Non pas seulement les découverts mais en plus acquérir des
expertises et de savoir-faire. Ce sont deux branches que chaque technicien de
maintenance industrielle doit les connaitre .
Le projet réalisé Recueilli entre mes
connaissances théoriques et pratiques et facilite mon insertion dans le
monde professionnel en passant 3 mois de stage dans une des plus grosses
institutions du pays.
L'objectif de ce projet est le développement d'une
application d'automatisation par vision industrielle. Ce type d'application
peut être destiné à toutes industrie appliquée au
domaine.
En rédigeant cette mémoire de fin
d'étude, on a présenté l'entreprise d'accueil et
diagnostiqué le système de traitement des bagages existant. On a
conçu un nouveau système de traitement des bagages et on a fini
par une réalisation pratique de la solution proposée.
En perspectives, beaucoup de travail reste à faire pour
améliorer la réalisation pratique du nouveau système de
traitement de bagages et mettre en place une supervision du système
automatisé.
2018/2019 76 Zarai Rayen
Bibliographie
[1]. Adel SAID et Yassine JEMAI ,Support de cours installation
industrielle
[2]. Awatif ELBANANI, Rapport AUTOMATISATION DE LA STATION DE
TRAITEMENT D'EAU
[3].
https://fr.wikipedia.org/wiki/Schéma_électrique
[4].
https://www.tecnipass.com/cours-materiels-controle-
parametrage.variateur?page=2&fbclid=IwAR247tF42b28ylMKRpaXP41Nu_e1GS2
dqFK4AjroEFicR4mCCTk9uylIt1c
[5].
www.oaca.nat.tn
[6].
http://stephane.genouel.free.fr/FT/0%20Dossier%20technique/1%20Texte
/Scenari%20capteurs/co/module_DT_8.html
[7].
http://www.technologuepro.com/cours-automate-programmable-industriel/Les-automates-programmables-industriels-API.htm
[8].
https://www.uvt.rnu.tn/resources-
uvt/cours/Automates/chap2/co/Module_chap2_14.html
[9].
https://www.uvt.rnu.tn/resources-
uvt/cours/Automates/chap2/co/Module_chap2_4.html
[10]. Solution technique ,Armoires électriques, de la
répartition électrique à l'exploitation des
réseaux.
Annexe
· Caractéristique du carrousel :
Caractéristique tambour de moteur
Diamètre = 160mm
Périmètre = 3.14 * 160 = 502.4mm
N = nombre de tour / cycle
N = distance de la bande de carrousel / période
N = 70 000/502.4
N = 139.33 ~ 139 tours / cycle
T = temp = Distance de bande carrousel / vitesse
T = D / V = 70 / 25 = 2.8 min
Tours / min = ?
139 Tours / cycle > 2.8 min
? < 1 min
N = 1 * 139 / 2.8 = 49.64 tours / min ~ 50 tours / min Nombre de
paires de pole du moteur = 4
· Caractéristique convoyeur à bande
transporteur :
Diamètre du tambour = 160 mm
Périmètre du tambour = ð * diamètre =
3.14 * 160 = 502.4 mm
N = nombre de tours par cycle
N = distance / période
N = 1500 / 502.4 = 2.98 ~ 3tours / cycle
T = Temps = D / V = 1500 / 12 000 = 0.125 min
3 tours / cycle > 0.125 min
? < 1 min
N = tours / min = 3 * 1 / 0.125 = 24 tours / min Nombre de
paires de pole est 4
· Caractéristique moteur de la machine à
rayon-X Périmètre du tambour = ð * diamètre =
3.14 * 160 = 502.4 mm N = Nombre de tours / cycle = Distance / période =
5500 / 502.4 = 10.94 tours Temps pour un cycle = distance / vitesse = 5.5 / 12
= 0.458 min
10.94 tours / cycle > 0.458 min
? < 1 min
10.94 / 0.458 = 23.886 tours / min ~ 24 tours / min
· Caractéristique moteur convoyeur à
bande d'injection Périmètre du tambour = ð *
diamètre = 3.14 * 160 = 502.4 mm N = nombre de tours par cycle =
distance / période = 2500 / 502.4 = 4.976 ~ 5 tours / cycle T = temps =
distance / vitesse = 2500 / 12000 = 0.208 min
5 tours / cycle > 0.208 min
? < 1 min
N = tours / min = 5 / 0.208 = 24 tours / min
·

Choix des relais thermiques
-Entre 4A et 6A le relais thermique est de
référence : LR1-D09310 TELEMECANIQUE/Schneider Electric (c'est le
cas du carrousel).
- Entre 1A et 1.6A le relais thermique est de
référence : LR1-D09306 TELEMECANIQUE/ Schneider Electric(c'est le
cas des deux convoyeurs).
- Entre 0.63A et 1A le relais thermique est de
référence : LR1-D09305 TELEMECANIQUE/ Schneider Electric(c'est le
cas de la machine à rayon-X).
- Entre 0.63A et 1A le relais thermique est de
référence : LR1-D09305 TELEMECANIQUE/ Schneider Electric (c'est
le cas des deux volets).
· Choix des sectionneurs portes fusible
10mm
-Le sectionneur porte fusible générale
I(convoyeur injecteur)+I(MRX)+I(convoyeur
transporteur)+I(carrousel)+I(deux volets) = 1.04 + 0.7 + 1.04 + 4.17 + 0.95 =
7.9A
38mm
Choix du fusible : 7.9 * 1.5 = 11.85 A ~ 12 A
Donc le référence du sectionneur est :
TELEMECANIQUE/ Schneider Electric LS1-D2531
+LAB-D254
-Choix du sectionneur porte fusible de moteur du convoyeur
à bande d'injection
Imax = 1.04 * 1.5 = 1.56 A
Donc le référence du sectionneur est :
TELEMECANIQUE / Schneider Electric LS1-D2531
-Choix du sectionneur porte fusible de la machine à
rayon-X
Imax = 0.7 * 1.5 = 1.05 A
Donc le référence du sectionneur est :
TELEMECANIQUE Schneider Electric LS1-D2531
-Choix du sectionneur porte fusible de moteur du convoyeur
à bande transporteur
Imax = 1.04 * 1.5 = 1.56 A
Donc le référence du sectionneur est :
TELEMECANIQUE /Schneider Electric LS1-D2531
-Choix du sectionneur porte fusible de moteur du
carrousel
Imax = 4.17 * 1.5 = 6.25 A
Donc le référence du sectionneur est :
TELEMECANIQUE /Schneider Electric LS1-D2531
-Choix du sectionneur porte fusible de moteur du
volet
Imax = (2 * 0.475) * 1.5 = 1.425 A
Donc le référence du sectionneur est :
TELEMECANIQUE /Schneider Electric LS1-D2531
· Choix des contacteurs (voire l'intensité dans
le tableau d'inventaire ci-dessus)
-carrousel :
section câble : 6mm2
Contacteur : LC1-D16 + un contact auxiliaire de réf :La1
-D22
-convoyeur d'injection :
section câble : 2.5mm2
Contacteur : LC1-D12 + un contact auxiliaire de réf :La1
-D22
-convoyeur transporteur :
section câble : 2.5mm2
Contacteur : LC1-D12 + un contact auxiliaire de réf :La1
-D22
-Machine à rayon-X :
section câble : 2.5mm2
Contacteur inverseur : L-D099 + deux contacts auxiliaires de
réf :La1 -D22
-deux volets :
section câble : 2.5mm2
Contacteur inverseur : L-D099 + deux contacts auxiliaires de
réf :La1 -D22
· Choix des contacteurs auxiliaires On a besoin de deux
auxiliaires sans bobine : -une de référence : LA1-D11 pour
CYRB
-une de référence : LA1-D22 pour QD
En outre on a besoin de trois auxiliaires avec bobine (pour
RAU,CYRB,AD):
-CA2-DN222
- CA2-DN222
- CA2-DN222
· Choix des temporisateurs
Nous avons besoin de deux blocs de contacts auxiliaires
temporisés de type au repos , de référence TELEMECANIQUE
LA3-D22
Programmation
Ladder des étapes :



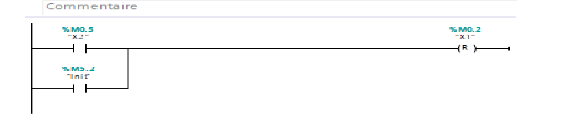

Ladder des Actions liées au étapes
:
Figure 33:Entré alimentation triphasé
Les Schémas électriques de
puissance


Figure 34:Moteur du convoyeur d'injection et moteur de la
machine à rayon-X
Figure 35:Moteur du convoyeur transporteur et moteur de
carrousel
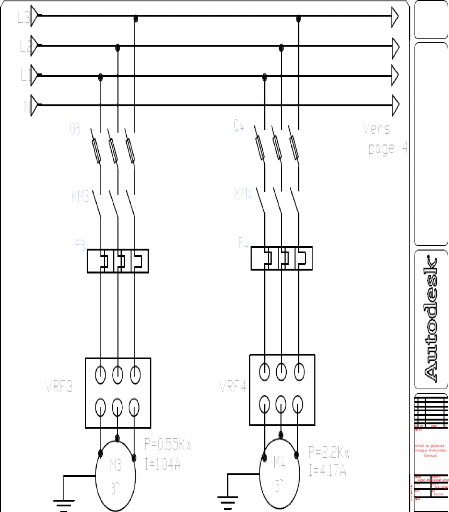
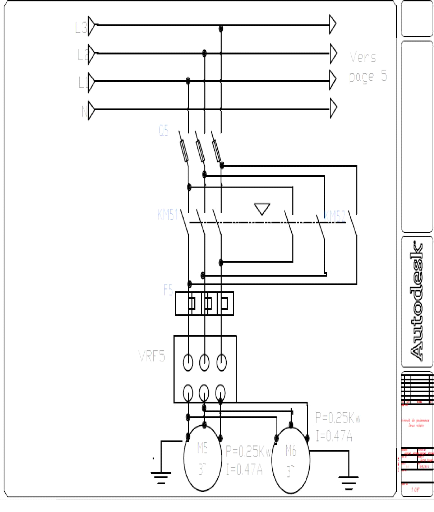
Figure 36:Les moteurs des deux volets
Les schémas électriques de commande
:
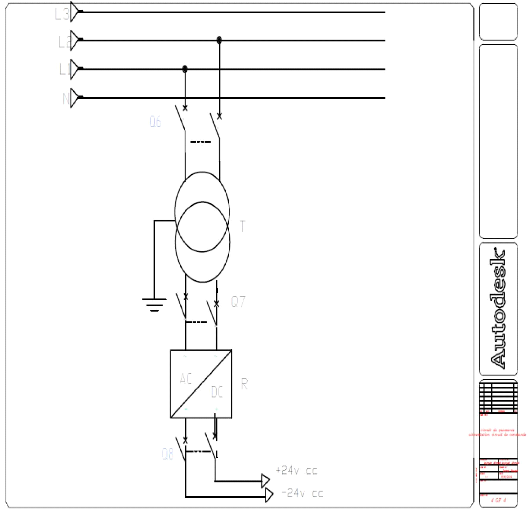
Figure 37:Le stabilisateur(transformateur +
redresseur)
Figure 38:Schéma de commande numéro1


Figure 39:Schéma de commande numéro 2

Figure 40:Schéma de commande numéro 3
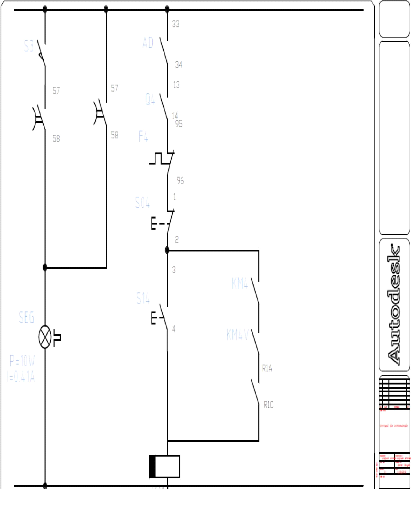
Figure 41:Schéma de commande numéro 4
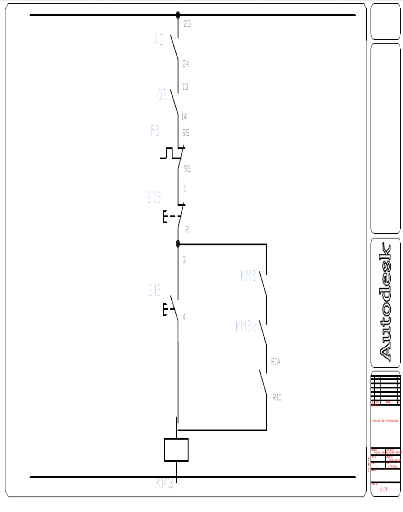
Figure 42:Circuit de commande numéro 5
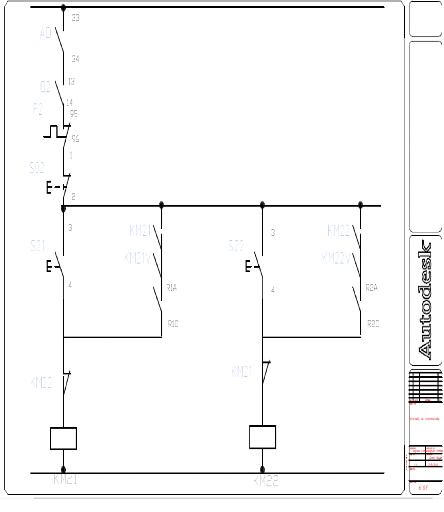
Figure 43:Schéma de commande numéro 6

Figure 44:Schéma de commande numéro 7
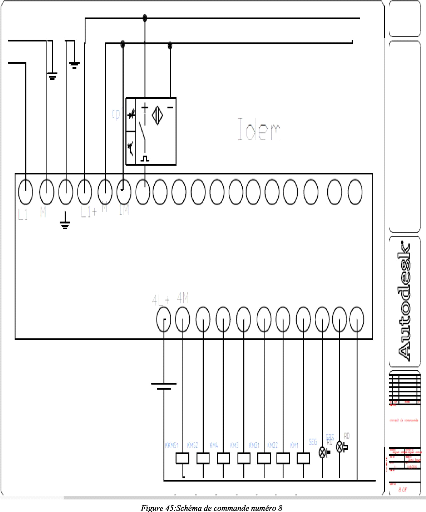
Figure 45: Schéma de commande numéro 8
IoF
oô000000000 00
cc)
00000100
H KM3
· 11 SEG
q
RD
J
f
01 ..!
·
}
0
| 

