4.4.2. Les moteurs à réluctance
variable
Les moteurs à réluctance variable fonctionnent
selon un principe différent de celui des moteurs à aimants
permanents, Ils possèdent bien évidemment un stator et un rotor,
mais ce dernier est fabriqué en acier doux non magnétique. Il
n'est pas lisse et possède plusieurs
Chapitre 04
Réalisation pratique
52
dents. Ce type de moteur est représenté en Figure
4.20. On peut voir, dans cet exemple, que le stator est composé de 8
plots sur lesquels sont enroulés les bobinages, ce qui donne 4 phases.
Le rotor, quant à lui, ne comporte que 6 dents.
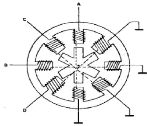
Figure 4.20: Moteur à reluctance
variable
4.4.3. Les moteurs hybrides
Le rotor comporte en périphérie des dentures
polarisées par aimants. La fonction Motors est obtenue par deux effets
:
· Effet de réluctance variable dû aux
dents,
· Propriété des aimants permanents. Ses
principales caractéristiques sont :
· Bonne résolution (jusqu'à 400 pas par
tour).
· Couple plus important que les moteurs à
réluctance variable.
· Fréquence de commutation élevée.

Il est donné sur la Figure 4.21
Figure 4.21 : La structure interne d'un moteur
hybride
| 

