|
Année universitaire: 2012 / 2013
»þÌ·ß'
»þ7'1Øãþ/ß' »þ1'2·ß'
»þ1Hã·ß'
République Algérienne Démocratique
et Populaire
òãàÌß'
+£ß' H òßéÌß'
EþàÌß' )1'2H

Ministère de l'enseignement Supérieur et
de la Recherche scientifique
Université Mohamed Khider
Biskra
Faculté des Sciences et de la
Technologie
Département de Génie Electrique
Filière
: Automatique
Option : Automatique Avancée
Réf:
Mémoire de Fin d'Etudes
En vue de l'obtention du diplôme:
MASTER
|
Robot Mobile avec Suivi Visuel de ligne
|
Présenté par :
-Belhouchet Khaled -Khammar Kamelia
Soutenu le : 05 Juin 2013 Devant le jury composé
de :
|
Mr
|
Messaoudi Abdelhamid
|
MAA
|
Président
|
|
Mr
|
Boumehraz Mohamed
|
MAA
|
Encadreur
|
|
Mr
|
Benelmir Okba
|
MCB
|
Examinateur
|
Cachet et signature
»þÌ·ß'
»þ7'1Øãþ/ß' »þ1'2·ß'
»þ1Hã·ß'
République Algérienne Démocratique
et Populaire
òãàÌß'
+£ß' H òßéÌß'
EþàÌß' )1'2H

Ministère de l'enseignement Supérieur et
de la recherche scientifique
Université Mohamed Khider
Biskra
Faculté des Sciences et de la
Technologie
Département de Génie Electrique
Filière
: Automatique
Option : Automatique Avancée
Mémoire de Fin d'Etudes
En vue de l'obtention du diplôme:
MASTER
Robot Mobile avec Suivi Visuel de ligne
Présenté par : Avis favorable de
l'encadreur:
-Belhouchet Khaled - Boumehraz
Mohamed signature
-Khammar Kamelia
Avis favorable du Président du Jury
Messaoudi Abdelhamid Signature
»þÌ·ß'
»þ7'1Øãþ/ß' »þ1'2·ß'
»þ1Hã·ß'
République Algérienne Démocratique
et Populaire
òãàÌß'
+£ß' H òßéÌß'
EþàÌß' )1'2H

Ministère de l'enseignement Supérieur et
de la Recherche scientifique
Université Mohamed Khider
Biskra
Faculté des Sciences et de la
Technologie
Département de Génie Electrique
Filière
: Automatique
Option : Automatique Avancée
Robot Mobile avec Suivi Visuel de ligne
Proposé par : Belhouchet Khaled et
Khammar Kamelia Dirigé par : Boumehraz Mohamed
RESUMES (Français et Arabe)
Notre projet robot mobile avec suivi visuel de
ligne, est de type uni-cycle composé par un châssis et 3
roues : deux roues motrices polarisées sur même
axe et une roue libre pour assurer l'équilibre du robot. Pour commander
les deux moteurs CC une carte ArduinoUno a été
utilisée.
Le suivi de la ligne est assuré par un système
à base d'un laptop et une webcam permettant
l'acquisition en temps réel de l'image du terrain. Cet
image utilisée pour la détection de la ligne et le calcule des
commandes envoyées à la carte de commande des moteurs pour
assurer le suivi de la ligne.
æÿ°Û®äã
)/éÿØàß æÿà Ë
*ü Ë 3 H 1é7' æã *îH®ß'
FîÜþ . 1é'äß'
»þ®1/4'ßé Ê'þ C®ã
*îH1 æË )1é'Ë î3/4
éèËH®ã
. îèþ' îèþH/1'
»×éÄ éèã·3'
®ä'ã &é®Û 1éÿ
9îç æã æÿÛ®äß'
òÓ âÜß .*îH®ß'
F2'î ÖÿØß )®£
»à ËH 1îäß' 2Ôç
ðàË ?? ?????? ???? )1î1/4ß' G#172;3/4 .
ÞØß' )1î1/4ß ®·é'ã
ÞØè EîØ êþH
'®ÿãéÛ H Dîäã
®îÿ'äÛ éèàäÌ3'
1é'äß' Ê' FéäÀßH
. ÑÇÓãáÇ ????
ÉÈÞÇJ??
ÊÇßJÍãáÇ ??
??ÿáÇ ???? ìáÇ
???JãáÇ JãÇæ?Ç
ÈÇÓÍæ
ÑÇÓãáÇ
Le mémoire contient par ordre
d'apparition:
- Dédicaces
- Remerciements
- Liste des Tableaux
- Liste des Figures
- Liste des abréviations
- Résumés (bilingue)
Sommaire:
* Introduction générale
* Chapitre 1, 2, 3...
(Chaque chapitre commence par une Introduction
et se termine par une conclusion)
* Conclusion générale et perspectives
* Bibliographie
* Annexe
Type d'écriture:
- Times new Roman 12
- Les titres en Gras
- Interligne 1.5
- Formules et Figures sont numérotées par
chapitre:
exp. Fig. n°Chap. n°figure (Fig. I.1) ou
(Equ. I.1)
· Ecrire les résumés bilingues dans une seule
page...
æÿÐàßé
)®Û#172;äàß °·àã
»éÛ ·
???? ?? J ( »ÿ'ç®Ôß'H
»ÿ®Ìß'
)
뇂
...
ÉÏÍÇJ
Remarques:
· Eviter le glaçage de la page de garde.
ðßH÷' »Ô1/4ß' ÿà
EË ·
· Respecter le contenu par ordre d'apparition.
å?Ú ÑæßÐãáÇ
ìæÊÍãáÇ
ãÇÑÊÍÇ ·
Dédicaces
Je dédie ce modeste travail :
A mes parents
A mes
chères soeurs
A tout mes amis
Khammar kamelia.
Remerciements
Nous tenons premier lieu remercier Dieu tout puisant
de m'avoir accordé la force et le courage de mener ce travail à
terme.
Nous tenons à adresser mes sincères
remerciements à mon encadreur de thème le Dr .Mohamed Boumehraz
,Professeur à l'Université Mohamed Kheidar de Biskra pour sa
disponibilité, pour sa lecture , suggestion et remarques et surtout pour
sa confiance sans limite mise en mois tout au long de ce projet de recherche.
Nous vous pris de bien vouloir agréer le témoignage de ma plus
vive reconnaissance et mon profond respect.
Nous remerciements particulièrement ma famille pour
leur soutien moral tout au long de ce travail, merci de m'avoir
encouragé, et cru en moi.
Nous remerciements également mes amis mes
collègues de travail, sans oublier mes collègues du laboratoire
qui m'ont encouragé tout au long de ce projet et m'ont beaucoup
aidé.
Enfin, nous remerciements les membres de jury qui m'ont fait
l'honneur d'accepter de juger ce modeste travail.
Liste des tableaux
Tableau.III.2 : Table de
vérité de pont en H..........................................
44
Tableau.III.4 : Les principales
caractéristiques de l'Arduino Uno 46
Liste des figures
CHAPITRE I : Généralités sur
les robots mobiles.
Figure. I.1 : Représentation d'un
robot mobile 02
Figure. I.2 : Exemple de plate-forme
différentielle 04
Figure. I.3 : Urban Robot de la
société iRobot 04
Figure. I.4 : Exemple de plate-forme
omnidirectionnelle. 04
Figure. I.5 : Exemple de plate-forme non
holonome.......................................... 05
Figure. I.6: Robot mobile: (a)
MIABOT, (b) Pioneer P3-DX.............................. 06
Figure. I.7 : Robot mobile de type voiture.
07
Figure. I.8 : Robucab 08
Figure. I.9 : Le robot martien Sojouner
10
Figure. I.10 : Le robot sous marin TAIPAN
10
Figure. I.11 : Drone de surveillance RESSAC
de l'ONERA 10
Figure. I.12 : Localisation à
l'estime 10
Figure. I.13 : Localisation absolue
(méthode par triangulation) 12
Figure. I.14 : Courbe B-spline 14
Figure. I.15 : Courbe de Bézier
cubique 14
Figure. I.16 : Graphe de visibilité
(à gauche) et diagramme de Voronoi (à droite) 15
Figure. I.17 : Poursuite de trajectoires
admissibles... 19
Figure. I.18 : Genghis,
développé par Rodney Brooks au MIT au début des
années
1990 20
Figure. I.19 : Exemples de robots
utilisés dans différentes applications 20
CHAPITRE II : Traitement d'image numérique-Suivi
visuel.
Figure. II.1 : Développement de la
science traitement d'image depuis 1950 à 2005 26
Figure. II.2 : Le niveau de gris du pixel
27
Figure. II.3 : Image couleur 28
Figure. II.4 :
Pixellisation.................................................................................
29
Figure. II.5 : Effets de la quantification
à l'acquisition...........................................29
Figure. II.6 : Les images sont prises dans
différent de bruits 30
Figure. II.7 : Comparaison entre un
éclairage non uniforme et correction de
l'éclairage...................................................................................................
30
Figure. II.8 : Flou de bougé/filé
dû à un temps de pose/intégration trop
long..............30
Figure. II.9 : Effet de lignage dû au
balayage entrelacé des caméras vidéo............
31
Figure. II.10 : Schémas
présente familles d'approximation d'une droite 31
CHAPITRE III : Réalisation pratique.
Figure. III.1 : Schéma de commande
des moteurs avec le circuit L298.... 42
Figure. III.2 : Hacheur L298 43
Figure. III.3 : Schéma interne du
L298............................................................ 43
Figure. III.4 : Etat d'un pont en H : (a)
Moteur déconnecté, (b) Rotation ou sens 1, (c)
Rotation inverse ou sens inverse 45
Figure. III.5 : La première
fenêtre concerne la webcam 50
Figure. III.6 : La deuxième
fenêtre montre la détection de la ligne 51
Figure. III.7 : Schéma du principe du
système de commande.............................. 51
Liste des abréviations
I.N.S.A : Institut National des Sciences
Appliquées
L.A.A.S: Laboratories d'analyes et d'Architecture des
Systemes
GPS : Global Positionning System
EGNOS: European Geostationary Navigation Overlay System
GPSRTK : Real Time Kinematics
PMP : Planification de Mouvement Partiel
VFH : Vector Field Histogram
3 D: Dull, Dirty, Dangerous
RGB: Rouge-Vert Bleu
Bit: binary digit
HSV: Hue, Saturation, Value
YCbCr: Luminance, Chrominance bleue, Chrominance rouge CAN :
Convertisseur Analogique Numérique
CC : Courant Continue
GND : Modèle Géométrique Direct
VDD : alim ou niveau logique haut pour un circuit CMOS VSS : alim
ou niveau logique bas pour un circuit CMOS PWM : Modulation de largeur
d'impulsion
. ÑÇÓã
|
-»þ®1/4'ßé Ê'
-ßÑÍÊã
ÊæÈæÑ
|
: ".`1+4.414.4)11 û1.a1511
|
Résumé
Notre projet robot mobile avec suivi visuel de
ligne, est de type uni-cycle composé
par un châssis et 3 roues : deux roues motrices
polarisées sur même axe et une roue libre pour assurer
l'équilibre du robot. Pour commander les deux moteurs CC une carte
ArduinoUno a été utilisée.
Le suivi de la ligne est assuré par un système
à base d'un laptop et une webcam permettant l'acquisition en temps
réel de l'image du terrain. Cet image utilisée pour la
détection de la ligne et le calcule des commandes envoyées
à la carte de commande des moteurs pour assurer le suivi de la ligne.
Mots clefs : Robot Mobile-Suivi Visuel-Ligne.
????
·
·
: Ê?ÌÚ3 H 1é7' æã
*îH®ß' FîÜþ . 1é'äß'
»þ®1/4'ßé Ê'þ C®ã
*îH1 æË )1é'Ë î3/4
éèËH®ã
1éÿ 9îç æã
æÿÛ®äß' òÓ
âÜß .*îH®ß' F2'î
ÖÿØß )®£ »à ËH
1îäß' 2Ôç ðàË
æÿ°Û®äã
)/éÿØàß æÿà Ë
. îèþ' îèþH/1'
»×éÄ éèã·3'
®ä'ã !é®Û
G#172;3/4 . ÞØß' )1î1/4ß
®·é'ã ÞØè EîØ
êþH '®ÿãéÛ H Dîäã
®îÿ'äÛ éèàäÌ3'
1é'ãáÇ ????
äÇãÖáæ
. ÑÇÓãáÇ ????
ÉÈÞÇÑãá
ÊÇßÑÍãáÇ ??
ãßÍÊáÇ ???? ìáÇ
ÉáÓÑãáÇ
ÑãÇæ?Ç
ÈÇÓÍæ
ÑÇÓãáÇ ?? ?????? ????
ÉÑæÕáÇ
Robot Mobile Avec Suivi Visuel De Ligne
SOMMAIRE
Introduction générale: 01
Chapitre N°I: Généralités sur
les robots mobiles.
I.1. INTRODUCTION .. 03
I.2. DEFINITION . 03
I.2.1. Robot mobile . 03
I.3. APERÇU HISTORIQUE . 04
I.4. LES EFFECTEURS 05
I.4.1. Les plates-formes différentielles 05
I.4.2. Les plates-formes omnidirectionnelles . 06
I.4.3. Les plates-formes non holonomes 07
I.4.4. Les plates-formes à pattes 07
I.5. LA MODELISATION D'UN ROBOT MOBILE .07
I.5.1. Le modèle cinématique du robot de type
uni-cycle . 07
I.5.2. Le modèle cinématique de type voiture .
09
I.6. LES DIFFERENTS TYPES DE TERRAIN 10
I.7. LOCALISATION .. 12
I.8. PLANIFICATION DE TRAJECTOIRE 15
I.8.1. Approches polynomiales pour la génération
de trajectoires 15
I.8.2. Carte routière (road map) 16
I.8.3. Approche globale 17
I.8.3.1. Approche Par squelette 18
I.8.4. Approche locale .. 18
I.8.4.1. Méthodes des champs de potentiel ..18
I.8.4.2. Méthode de HUANG .. 18
I.8.5. Approche mixte 19
I.8.6. Approches réactives 19
I.8.6.1. Planification de mouvement partiel 19
I.8.6.2. Histogramme de champs de vecteurs ..19
I.9. EVITEMENT REACTIF D'OBSTACLES 20
I.9.1. Méthodes analytiques 20
1.9.2. Méthode de fenêtre dynamique .. 21
I.10. POURSUITE DE TRAJECTOIRE . 21
I.11. EXEMPLES D'APPLICATIONS 22
I.12. LES TACTIQUE DE NAVIGATION DES ROBOTS MOBILES . 23
I.12.1. Robots télémétriques sans
mémoire 23
I.12.2. Optimisation de trajectoires dans un univers connu
24
I.12.3. Tactiques de navigation optimisées et
interactives avec l'environnement 24
I.13. CONCLUSION 25
Chapitre N°II : Traitement
d'image numérique-Suivi visuel.
II.1. INTRODUCTION 25
II.2. HISTORIQUE DU TRAITEMENT D'IMAGES . 25
II.3. VISUALISATION 25
II.3.1. Définition 26
II.3.2. Image binaire . 26
II.3.3. Image en niveaux de gris 26
II.3.4. Image couleur 27
II.3.5. Image à valeurs réelles .. 27
II.4. ESPACE DE COULEURS 27
II.5. ACQUISITION: ECHANTILLONNAGE / QUANTIFICATION .. 28
II.5.1. Effets de l'échantillonnage : Pixellisation .
28
II.5.2. Effets de la quantification à l'acquisition .
28
II.5.3. Bruits lies à l'acquisition .. 29
II.6.RECONNAISSANCE DE FORMES 30
II.6.1. Définition .. 30
II.6.2. Méthode approximation d'une droite 30
II.6.2.1. Méthodes exactes .. 31
II.6.2.2. Approximation par estimation robuste .. 31
II.7. DOMAINES D'APPLICATION .. 32
II.8. TRAITEMENT D'IMAGE ET PERCEPTION VISUELLE .. 31
II.9. LES DIFFERENTS TYPES DE NAVIGATION 31
II.9.1 Guidage 31
II.9.2. Action associée à un lieu 32
II.9.3. Navigation topologique 32
II.9.4. Navigation métrique 32
II.10. CARACTÉRISTIQUE 32
II.11. LES REPRÉSENTATIONS DE L'ENVIRONNEMENT . 33
II.11.1. Carte topologique 33
II.11.1.1. Description 33
II.11.1.2. Avantage . 33
II.11.1.3. Inconvénient 34
II.11.1. Carte métrique 34
II.11.2.1. Description 34
II.11.2.2. Avantage . 35
II.11.2.3. Inconvénient 35
II.12. DOMAINES D'APPLICATION 35
II.13. MODÉLISATION DU CHEMIN PAR LA FORME 35
II.13.1. Représentation de la forme des objets 36
II.13.1.1. APPROCHES GLOBALES 36
II.13.1.2. APPROCHES LOCALES 37
II.13.2. Catégorisation des chemins par shape context
...37
II.14. MODÉLISATION ET CATÉGORISATION DE CHEMINS
...38
II.14.1. Définition chemin 38
II.14.2. Indexation de chemins par la forme 38
II.15.CONCLUSION 39
Chapitre N°III : Réalisation pratique.
III.1. INTRODUCTION .. 41
III.2. LA MÉCANIQUE .. 41
III.2.1. Le châssis 41
III.2.2. Principe de fonctionnement . 41
III.2.3. Structure du système 41
III.3. L'ÉLECTRONIQUE .. 41
III.3.1. Alimentation 41
III.3.2. Commande des moteurs CC 42
III.3.2.1. Pont en H . 43
III.3.2.2. Réalisation de module de commande des moteurs
à CC 45
III.3.3. Détection de la ligne 45
III.3.4. La carte Arduino Uno 45
III.3.4.1. Définition . 45
III.3.4.2 Entrées / Sorties 47
III.3.4.3 Communication 48
III.4. PROGRAMMATION . 48
III.4.1 Python .. 48
III.4.1.1. Définition . 48
III.4.1.2. Caractéristique du langage de programmation
(python) .49
III.4.1.3. Open CV .. 50
III.4.1.3.1. Fonctionnalités d'Open CV 50
III. 4.2. L'interface graphique: 50
III.5. CONCLUSION 51
Conclusion générale et perspectives . 53
Bibliographie Annexe
INTRODUCTION GENERALE
Grace à un succès qui ne se
dément pas, La robotique est une technologie moderne
et aujourd'hui la plupart sont automatisées à
l'aide des robots. Merci à la haute technologie que la dépendance
sur des êtres humains a été réduite dans une large
mesure.
Un des grands avantages de l'automatisation des
procédures est la précision des résultats. La robotique
est utilisée dans plusieurs industries comme l'automobile, la
médecine, l'électroménager et plusieurs autres. Le plus
complexe des machines peuvent être assemblées à l'aide de
la robotique.
Les robots peuvent être fixes (bras manipulateur) ou
mobiles (robot marcheur, robot à roues) selon l'application, les robots
fixes sont généralement utilisés dans les usines, les
hôpitaux, domaine agricole...etc. Cependant les robots mobiles sont
généralement utilisés dans les environnements dangereux:
nucléaires, militaires, déminage,...etc. Ce dernier type de robot
est notre domaine d'intérêt dans ce mémoire.
Le suivi d'objets en robotique mobile est devenu une des
tâches les plus utilisées, Notre Projet consiste a
réalisé un robot mobile suiveur de ligne de couleur sombre sur un
terrain de couleurs claire.
Notre mémoire est organisé comme suit:
Le premier chapitre présente des
généralités sur les robots mobiles; Le
deuxième chapitre est devisé en deux parties:
-La première concerne le traitement d'image
numérique: historique, définitions et applications.
- La deuxième traite la navigation : les différents
types de la navigation.
Le troisième chapitre décrit la réalisation
pratique: la partie pratique mécanique, la partie électronique et
les programmes développés.
Robot Mobile Avec Suivi Visuel De Ligne

1
En fin, nous finissons notre mémoire par une conclusion
qui présente le bilan de ce travail et les perspectives
envisagées.
Robot Mobile Avec Suivi Visuel De Ligne

2

Généralités sur les robots
mobiles
I.1. Chapitre I : Généralités Sur Les
Robots Mobiles
INTRODUCTION:
Loin des images des films de science fiction, montrant hommes
et robots cohabitant harmonieusement dans des environnements complexes, la
robotique c'est pendant longtemps limitée à ses applications
industrielles, se contentant de remplacer l'homme dans l'exécution de
taches simples et répétitives. Cette limitation venait notamment
de l'impossibilité de créer des systèmes capables
d'évoluer dans un environnement réel. En effet gérer
l'extrême diversité des situations dans lesquels un robot peut se
trouver est très difficile. Il est clairement impossible de
prévoir tous les cas de figure pour préparer des comportements
types en fonction des situations rencontrées. Il faut des lors que le
robot soit a même de percevoir son environnement intelligemment pour
apprendre et comprendre cet environnement en vu de planifier ses actions.
Loin d'avoir résolu totalement ce problème la
robotique a cependant connu ces dernières années plusieurs
victoires importantes qui ont conduit à de profonds changements. Qu'ils
soient à pattes ou à roues, volant ou rampant, les robots sont
désormais capables de se mouvoir dans des environnements aussi complexes
que le sol martien ou un hall de musée avec très peu de
supervision de la part de l'homme.
Dans ce chapitre nous avons présenté les
différents types de robots mobiles, et des contraintes de terrain sur
les qu'ils sont conçus pour évoluer, nous aborderons les
contraintes principales liées à leur cinématique, et les
solutions développées pour y remédier.
Enfin nous étudions les outils permettant aux robots de
percevoir leur environnement et de s'y repérer. Etape primordiale
nécessaire à l'autonomie totale des robots mobiles. Cet
état de l'art offre une vision non exhaustive des thématiques de
recherche associées au domaine de la robotique mobile, et
présente l'ensemble des verrous scientifiques qu'il reste à lever
pour aboutir au développement d'un robot autonome. Parmi ceux-ci, nous
nous focalisons alors sur celui de la navigation d'un robot mobile. On
en trouve ci-dessous un résumé d'analyses de quelques domaines
particuliers ou Applications de la robotique.
I.2. DEFINITION:
I.2.1. Robot mobile: De manière
générale, on regroupe sous l'appellation robots mobiles
l'ensemble des robots à base mobile (Figure.
I.1).
3
Robot Mobile Avec Suivi Visuel De Ligne

Chapitre I: Généralités
Sur Les Robots Mobiles
Figure. I.1 : Représentation d'un robot
mobile.
Ces machines sont constituées d'un châssis,
et d'un ensemble de roues, ayant comme fonction la stabilité et la
mobilité du système (nous n'allons nous intéresser qu'aux
robots mobiles à roues, en faisant abstraction des autres types de
plateformes, comme les robots marcheurs, ou rampants). La particularité
de ces robots est leur capacité à se mouvoir dans des
environnements relativement grands (sans influer sur leur constitution),
grâce à leur système de locomotion, c'est pour cela que
nous allons dans ce qui suit évoquer les différents types de
roues utilisées en robotique mobile [1].
I.3. APERÇU HISTORIQUE:
La robotique est passée par plusieurs
générations comme suit, [2] :
y' 1947 : Premier manipulateur électrique
- télé-opéré.
y' 1954 : Premier robot programmable.
y' 1961 : Utilisation d'un robot industriel,
commercialisé par la société UNIMATION (USA), sur une
chaine de montage de General Motors.
y' 1961 : Premier robot avec contrôle en
effort.
y' 1963 : Utilisation de la vision pour commander un
robot.
y' 1978 : Le robot ARGOS .Développé
à l'Université Paul Sabatier de Toulouse (France).Le robot ARGOS
simule la navigation d'un robot mobile équipé d'un système
de vision au fur et à mesure de ses déplacements.
y' 1979 : le robot HILARE .les chercheurs de L.A.A.S. DE
TOULOUSE (France) étudièrent la planification des trajectoires
d'un robot mobile ponctuel, dans un environnement totalement connu.
y' 1981 : Le robot VESA. Ce robot, construit à
l'I.N.S.A(France).de Rennes, est
équipée d'un arceau de
sécurité pour réaliser la détection d'obstacles
dans un environnement totalement inconnu.
4
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
1' 1984 : Le robot FLAKEY .Ce robot, conçu et construit au
Stanford Research Institute et le reflet des améliorations
apportées par 14 années de développement .Le robot FLAKEY
est équipé de deux roues motrices avec encodeurs, mais sa vitesse
maximale est de 66 cm /s au lieu de quelques centimètres par seconde .Ce
robot est capable de naviguer dans des environnements réels.
1' 1993 : Les robots ERRATIC et PIONNER. Le robot ERRATIC
à été conçu par Kurt Konolige, au Stanford Research
Institue, comme un robot mobile de faible cout pour ses cours de robotique.
1' Les robots mobiles actuels : A présent la plupart des
travaux de recherche portent sur les problèmes de perception. La
planification de trajectoires, l'analyse et la modélisation de
l'environnement de robot, appliqué sur des robots mobiles commerciaux
.également la recherche actuelle sur la conception mécanique des
robots mobiles pour des applications hautement spécialisées,
comme l'exploration sous-marine, les robots volants et le micro robots [3].
I.4. LES EFFECTEURS:
Nous présentons ici les différents types de bases
mobiles utilisées en robotique, en nous focalisant sur le milieu
intérieur.
I.4.1. Les plates-formes différentielles
: Une des configurations les plus utilisées pour les
robots mobiles d'intérieur est la configuration différentielle,
on va la utilisé dans notre projet qui comporte deux roues
commandées indépendamment. Une ou plusieurs roues folles sont
ajoutées à l'avant ou à l'arrière du robot pour
assurer sa stabilité (Figure. I.2).
Cette plate-forme est très simple à commander,
puisqu'il suffit de spécifier les vitesses des deux roues, et permet de
plus au robot de tourner sur place. Cette possibilité permet de traiter
le robot comme un robot holonome, c'est à dire un robot pouvant se
déplacer dans toutes les directions depuis sa position courante (au
contraire d'une voiture par exemple qui est non-holonome). Cette
propriété simplifie énormément la planification de
déplacement et la commande du robot.
5
Robot Mobile Avec Suivi Visuel De Ligne

Chapitre I : Généralités Sur Les Robots
Mobiles
Figure. I.2: Exemple de plate-forme
différentielle.
· Ce type de plate-forme peut également être
utilisé avec des chenilles ce qui fournit une capacité de
franchissement de petits obstacles intéressante (Figure.
I.3). Ces plates-formes peuvent ainsi être utilisées en
milieu urbain, ou dans des décombres. L'utilisation de chenilles conduit
cependant à une odométrie très bruitée à
cause du contact mal défini entre les chenilles et le sol [1].

Figure. I.3: Urban Robot de la
société iRobot.
I.4.2. Les plates-formes
omnidirectionnelles:

Figure. I.4: Exemple de plate-forme
omnidirectionnelle.
6
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
Les plates-formes omnidirectionnelles permettent de
découpler de manière encore plus nette le contrôle de la
rotation et de la translation d'un robot et en font une plateforme
réellement holonome. Elles utilisent pour cela 3 ou quatre roues qui
tournent à la même vitesse pour fournir une translation et un
mécanisme qui permet d'orienter simultanément ces roues dans la
direction du déplacement souhaitée (Figure.
I.4).
Le corps du robot lui-même n'effectue pas de rotation mais
uniquement des translations. Ce système permet un contrôle
très simple et relativement rapide car les changement de direction ne
concernent que les roues et peuvent donc se faire très vite. Par contre
ces plates-formes sont relativement limitées en capacité de
franchissement et requièrent un sol très plan [1].
I.4.3. Les plates-formes non holonomes
: Des plates-formes non holonomes, de type voiturent, sont
également utilisées en robotique mobile (Figure.
I.5). Ces plates-formes sont toutefois plus difficiles à
commander car elles ne peuvent pas tourner sur place et doivent manoeuvrer, ce
qui peut être difficile dans des environnements encombrés. La
commande de ces plates-formes pour réaliser un déplacement
particulier est un problème à part entière [1].

Figure. I.5 : Exemple de plate-forme non
holonome.
I.4.4. Les plates-formes à pattes
: Des plates-formes à deux, quatre ou six pattes peuvent
également être utilisées. Les plateformes à six
pattes sont relativement pratiques car le robot est en équilibre
permanent, ce qui facilite le contrôle. Les plates-formes à deux
ou quatre pattes sont plus complexes à commander et le simple
contrôle de la stabilité et d'une allure de marche correcte reste
aujourd'hui difficile, ce qui les rend en général relativement
lentes.
L'odométrie de ce type de plates-formes est de plus
généralement de très faible qualité. Ces
différents facteurs font que ces plates-formes sont rarement
utilisées quand
7
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
l'application visée a un besoin précis de
positionnement et de navigation. De telles plates-formes commencent cependant
à apparaître à relativement grande échelle (par
exemple le robot Aibo de Sony) et peuvent être utilisées en
conjonction avec certaines méthodes de navigation précises
[1].
I.5. LA MODELISATION D'UN ROBOT MOBILE:
I.5.1. Le modèle cinématique du robot de type
uni-cycle:

(a) (b)

Figure .I.6: Robot mobile: (a)
MIABOT, (b) Pioneer P3-DX.
Le modèle d'un robot mobile uni-cycle correspond à
celui d'une roue roula
La configuration de l'uni-cycle e caractérisée par
la donnée es nombres
Où x et y dénotent les
coordonné cartésiennes du point de ntact de la roue avec le
sol
dans un repère cartésien donné, orientation
de la roue et 'angle de la roue mesurée à
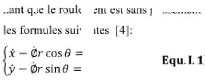
partir de la verticale. Sach u ement est sans glissement le
modèle cinématique
de la roue s'exprime par van
0 ( )
0
Où r représente le rayon de la roue.
Le modèle (1.1) peut être transformé pour
faire apparaître les composantes des vitesses
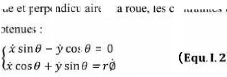
dans les plans de la roue peenule à l l contraintes
cinématiques
suivantes sont alors obs
s =
Ces deux équations sont des contraintes de type non
holonome, signifiant que l'on ne peut pas les intégrer de façon
à ne faire apparaître que les coordonnées
généralisées. Cela peut
8
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
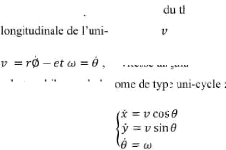
se démontrer simplement à l'aide
héorème de Frobenius. En notant la vitesse
it cycle avec
sa vitesse angulaire, on déduit de (1.1) le modèle
cinématique du
robot mobile non-holono e
( )
I.5.2. Le modèle cinématique de type voiture :
Un robot mobile de type voiture est composé d'un train moteur à
l'arrière du corps principal et de deux roues de direction et
à


bu érentiel à l'avant (Figure.
I.7)

iguration du véhicule de type v peut être
représentée pa quadruplet
[ Ø] , où le point de cordonnées le centre
de l'essieu arr de la
voiture, st l'orientation du véhicule, Ø
l'orientation des roues avant et distance
entre les essieux avant et
arrière.
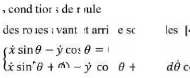
ins oment sans glissement s'obtient éivant que les
vitesses
Les
latérales u a e ère ont null
4]:
s 0
( )
( +y Ø)
s( + Ø) - os Ø = 0
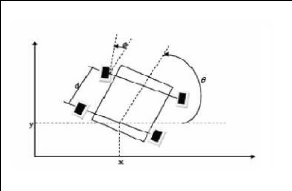
Figure. I.7: Robot mobile de type
voiture.
Ces contraintes sont non intégrables, le véhicule
de type voiture est donc non holonome.
9
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
En utilisant des tranons r l'équation(1.4) , le
modèle cinématique d'un
robot mobile non-holono v enu :

( )
Où orrespond à la vitesse longitudinale du corps du
robot, alors que
rrespond à la vitesse angulaire des roues directrices par
rapport au corps du véhicule.
I.6. LES DIFFERENTS TYPES DE TERRAIN:
Nous rencontrons principalement 3 types d'espaces de navigation :
les terrains plats, les Terrains accidentés et les espaces 3D. Les
terrains plats sont généralement utilisés pour
modéliser les milieux urbains et les intérieurs de
bâtiments. Le robot évolue sur un plan 2D considéré
sans pentes, et tout objet qui sort de cet espace 2D est
considéré comme un obstacle (Figure. I.8).
Cette représentation est la plus simple à
étudier et la plus répandue pour les robots mobiles aux roues. En
première approche, elle permet de se concentrer sur les problèmes
de contrôle et de navigation autonome du robot.

Figure. I.8 : Robucab [10].
Les terrains accidentés (ou 2D 1 /2) correspondent
généralement aux milieux en extérieurs, comme des
forêts, des champs en robotique agricole, ou encore des terrains rocheux
(Figure. I.9). La différence avec les
terrains plats est la présence des pentes, de bosses et de creux sur le
terrain d'évolution du robot.
10
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
Cela interdit d'utiliser une métrique standard 2D et cela
complique pour beaucoup la détection d'obstacles et la
modélisation des déplacements du robot. De plus il devient
également important de vérifier que le robot ne bascule pas quand
il escalade une pente ou enjambe un obstacle. Le système de locomotion
du robot doit dans ce cas être adapté à la topologie du
terrain.
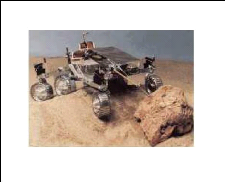
Figure. I.9 : Le robot martien Sojouner
[5].
Enfin les espaces d'évolution 3D sont par exemple
utilisés pour modéliser la navigation des robots sous-marins
(Figure. I.10) et des drones volants (Figure.
I.11). Les problèmes rencontrés sont spécifiques
à l'application visée.
Chaque type de terrain correspond à des
problématiques bien spécifiques. Le type de robot
étudié dans ce mémoire est celui destiné à
circuler en environnement urbain, la modélisation terrain plat sera
utilisée. Cela signifie que l'on considère que tous les
mouvements sont contenus dans un plan de navigation, parallèle au
sol.

Figure. I.10 : Le robot sous marin TAIPAN
[12].
11
Robot Mobile Avec Suivi Visuel De Ligne

Chapitre I : Généralités Sur Les Robots
Mobiles
Figure. I.11 : Drone de surveillance
RESSAC de l'ONERA [8].
I.7. LOCALISATION:
Les outils permettant la localisation d'un robot dans son
environnement peuvent être classés en deux catégories :
ceux par localisation à l'estime et ceux par localisation absolue [5].
Le principe de la première catégorie consiste à
intégrer des informations sur les vitesses ou les
accélérations fournies par des capteurs proprioceptifs
(odomètres, centrales inertielles).
L'avantage de ces méthodes est qu'elles sont
indépendantes de l'environnement, par contre leur souci est leur manque
de précision dû à la dérive temporelle. En effet les
Erreurs s'intégrant elles aussi au fur et à mesure du temps. Il
est nécessaire d'apporter régulièrement des recalages
(Figure. I.12).
Figure. I.12 : Localisation à
l'estime.
12
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
Parmi les méthodes de localisation à l'estime, le
système le plus simple et le plus couramment utilisé pour la
mesure de déplacement du robot est l'odométrie.
L'hypothèse de roulement sans glissement que nous avons vu
précédemment, nous permet de relier directement les
déplacements du robot à la vitesse de rotation des roues. Par
intégration des déplacements à chaque instant, on en
déduit la position relative du robot par rapport à son point de
départ. L'odométrie est une méthode de localisation
très courante, simple, mais également très rapidement
imprécise.
En effet à cause du glissement des roues sur le sol, les
erreurs s'accumulent au fur et à mesure que le robot avance, ce qui
implique d'importantes erreurs sur les longs parcours s'il n'y a pas de
recalage régulier.
Cette méthode est de ce fait fortement tributaire de la
qualité du sol sur lequel le robot se déplace. Les incertitudes
sur le diamètre exact des roues, sur les paramètres
géométriques du robot, sur la résolution des codeurs,
génèrent des erreurs de type systématique, qui vont
s'accumuler très rapidement en odométrie.
Cependant, ces erreurs peuvent être identifiées et
évaluées pour faire un rééquilibrage du
système et ainsi améliorer sa précision. Les erreurs non
systématiques comme les glissements ou les irrégularités
du sol, génèrent moins rapidement des erreurs, mais ne peuvent
par contre pas être rééquilibrées puisqu'on ne peut
pas les prévoir.
Pour l'exploration martienne, où le terrain est fortement
accidenté, l'utilisation de
Système d'odométrie classique est impossible. Pour
cette application, Cheng a proposé une technique d'odométrie
alternative, dite odométrie visuelle, basée sur la reconnaissance
de points singuliers dans l'image vidéo du sol fournie par une
caméra montée sur le robot [5] (les points de Harris).
Connaissant le positionnement de la caméra par rapport au
robot, le déplacement de ces points dans l'image permet d'évaluer
les vitesses de déplacement du robot, et par intégration, de
retrouver sa localisation relative par rapport à sa position
initiale.
Le second type de méthode pour la localisation est la
localisation absolue. Ces méthodes utilisent des éléments
repérables par le robot dans l'environnement de navigation, de
position
Connue, pour permettre au robot de se repérer relativement
à ceux-ci. Ces éléments sont appelés des balises ou
amers et sont dits soit réels, s'ils ont été placés
spécialement pour permettre la localisation, soit virtuels s'il s'agit
d'éléments présents naturellement.
13
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
Les balises réelles sont dites passives si elles ont pour
but de réfléchir un signal émis par un appareil de mesure
du robot (laser ou infrarouge). Il existe deux méthodes pour utiliser
ces balises pour la localisation du robot : la méthode
télémétrique (calcul de la distance robot/balise), qui
nécessite la présence de deux balises pour calculer la position
du robot dans le plan ; et la méthode par triangulation, qui consiste
à mesurer les angles entre chaque balise et le robot, et qui elle
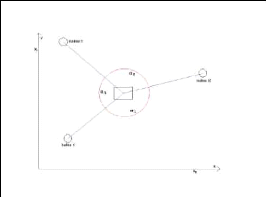
nécessite l'utilisation de 3 balises.
Figure. I.13 : Localisation absolue
(méthode par triangulation).
Les balises réelles sont dites actives si elles
émettent un signal captable par le robot. En Milieu extérieur, le
système GPS (global positionning system) peut être utilisé
pour obtenir des positions d'une précision de l'ordre du
mètre.
A la base développée par l'armée
américaine dans les années 80 (lancement du premier satellite GPS
en 1978), il fut ouvert aux civils en 1995. Jusqu'en 2000 les mesures
étaient volontairement entachées d'une erreur d'une centaine de
mètres, l'armée américaine craignant que ce système
soit un avantage pour leurs ennemis. Malgré le retrait de cette erreur
volontaire, la précision du système restait de l'ordre du
mètre, à cause des incertitudes sur l'orbite et l'horloge des
satellites, ainsi que les retards engendrés par la traversée des
couches atmosphériques.
Pour améliorer cette précision, nous pouvons
utiliser les GPS différentiels : avec un second récepteur GPS sur
une base fixe et de position connue. Il devient possible de mesurer l'erreur et
d'en déduire la correction à apporter pour la zone environnante,
pour que ce système fonctionne, il faut que la base mobile reste
à une certaine portée de la base fixe. Cette distance varie
suivant la gamme de fréquence utilisée pour l'envoi des
14
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
corrections, et peut atteindre quelques dizaines de
kilomètres pour les besoins de la navigation maritime.
Des satellites géostationnaires permettent
également de corriger certaines erreurs de position. Ils envoient des
corrections sur les orbites et les horloges des satellites GPS.
Ainsi pour l'Europe c'est le système EGNOS (European
Geostationary Navigation Overlay System) qui se charge d'envoyer ces
corrections. La précision atteinte est de l'ordre de 3m. Le
système de GPSRTK (real time kinematics) permet d'améliorer la
précision à quelques centimètres, en utilisant la
différence de phase de l'onde porteuse du signal, sa longueur d'onde
étant d'une vingtaine de centimètres.
En contre partie la portée de la station de
référence avec cette méthode n'est plus que de quelques
kilomètres. Pour augmenter cette portée on a recours au RTK
réseau, qui va utiliser la redondance d'informations pour communiquer
les corrections à l'appareil, via un serveur de calcul à
distance. Les systèmes de localisation GPS sont très
intéressants en rase campagne ou en banlieue.
Cependant ils s'avèrent beaucoup moins efficaces en pleine
ville ou en forêt. En effet pour fonctionner correctement un GPS a besoin
de recevoir les informations de 4 satellites au moins.
La présence d'obstacles tels que les ponts et grands
bâtiments en ville empêche parfois cette réception. Ainsi il
n'est pas rare de perdre la localisation GPS pendant quelques minutes. C'est
pour cela que beaucoup de recherches dans le domaine de la localisation sont
aujourd'hui portées sur les méthodes alternatives au GPS en
milieu urbain. La vision peut être un moyen pour compléter la
localisation par GPS. Ainsi Cappella [6].
Utilise un modèle 3D de la place Stanislas à Nancy
qui est confronté aux images obtenues par les caméras
embarquées sur le robot pour déterminer précisément
sa position. Yang propose d'utiliser les caméras du robot pour mettre au
point un système d'odométrie visuelle [7].
I.8. PLANIFICATION DE TRAJECTOIRE:
* Chemin: Un chemin entre une situation
initiale XI et une situation finale XF est une
représentation géométrique du d'emplacement du corps qui
ne considère pas le temps [8].
I.8.1. Approches polynomiales pour la
génération de trajectoires: Différentes
méthodologies de planification basées sur l'utilisation de
trajectoires Polynomiales. Par exemple, l'utilisation de courbes de type spline
ou B-spline. La trajectoire est conçue en
15
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
prenant en compte les contraintes cinématiques du robot
mobile ainsi que la position des différents obstacles statiques à
éviter.
Une trajectoire générée par une courbe
B-spline peut-être représentée à titre d'exemple
comme sur la Figure. I.14.
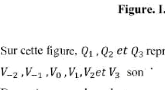
14 : Courbe B-spline.
résentent les points de passage de la courbe et
t les points qui forment le polygone de contrôle de la
courbe. En pratique pour les robots mobiles de type uni-cycle ou
véhicule, les B-splines cubiques s'avèrent être un choix
suffisant pour définir une trajectoire vérifiant les contraintes
cinématiques.
Une autre famille de trajectoires fréquemment
utilisées pour la planification des robots mobiles non-holonomes est
basée sur l'utilisation des courbes de Bézier.
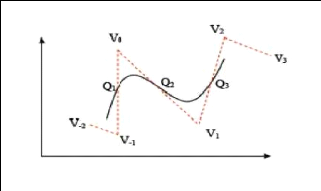
Un exemple de courbe de Bézier cubique est
représenté sur la Figure. I.15.
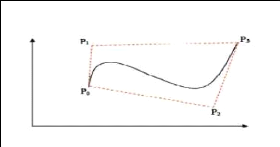
Figure. I.15 : Courbe de Bézier
cubique.
16
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
Les points stituent le polygone de contrôle de la courbe
[4].
I.8.2. Carte routière (road map)
:
Cette approche est basée sur l'identification d'un
ensemble de routes dans l'espace libre. La base de cette approche est de
capturer la connectivité de l'espace libre d'un robot dans un
réseau de dimension 1 de courbes ou de lignes appelée carte
routière. Une fois la carte routière construite, elle est
utilisée comme étant un réseau de segments de routes
(chemin) pour la planification des mouvements des robots.
L'objectif de cette approche est de construite un réseau
routière qui rend le robot capable à visiter tous les points
possible de l'environnement libre de navigation. On note qu'il y a deux
approches différentes pour la construction de la carte routière.
Dans le premier cas les routes sont le plus proche possible de l'obstacle,
d'où l'appellation de « Graphe de visibilité » les
chemins qui résultent sont de longueur minimum; le deuxième cas
est appelé « diagramme de Voronoi » les routes restent le plus
loin possible de l'obstacle [9].
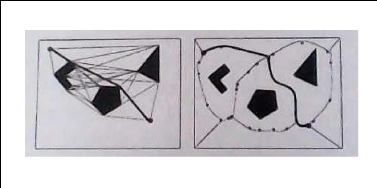
Figure. I.16 : Graphe de visibilité
(à gauche) et diagramme de Voronoi (à droite).
I.8.3. Approche globale: Elle est
utilisée lorsque le robot évolue dans un environnement
entièrement connu. Le principe de cette approche est de capturer la
connexité globale de l'espace libre dans un graphe qui est ensuite
exploré. La connaissance de l'environnement nécessite sa
modélisation:
17
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
I.8.3.1. Approche Par squelette:
Un squelette est une concaténation de portions de courbes.
Il est structuré en un graphe dont les arêtes sont ces portions de
courbes et les noeuds leurs extrémités.
Il existe plusieurs types de squelettes entre autres : les
graphes de visibilités et les `freeways' :
Graphe de visibilité: Les noeuds
du squelette sont les sommets des obstacles, tandis que les arêtes sont
les segments joignant deux à deux les sommets visibles. Les
`freeways': L'espace libre est divisé en un ensemble de
cônes dont les axes constituent les `freeways' que le robot va pouvoir
suivre. Les arêtes du graphe représentent les `freeways', alors
que les noeuds sont leurs extrémités.
Les méthodes se basant sur une approche globale ont
l'avantage de générer un chemin optimal tandis qu'elles ont
l'inconvénient de consommer beaucoup de temps de calcul et d'espace
mémoire [10].
I.8.4. Approche locale : Contrairement
à l'approche globale, cette approche ne nécessite pas une
connaissance a priori de tout l'environnement, mais découvre celui ci au
fur et à mesure à l'aide de systèmes de perception.
Cette approche est itérative (incrémentale). A
chaque itération, on détermine l'incrément du
déplacement. A titre d'exemple on peut citer deux méthodes [10] :
I.8.4.1. Méthodes des champs de potentiel : Le
robot est assimilé à un point plongé dans un champ de
potentiel artificiel. Ce champ de potentiel est défini comme la
combinaison d'un potentiel qui attire le robot vers sa cible et de potentiels
qui l'écartent des différents obstacles. Des améliorations
de cette méthode ont vu le jour après le résultat
satisfaisant qu'elle a donné.
I.8.4.2. Méthode de HUANG: Le
principe de cette méthode est d'essayer de joindre la cible en ligne
droite (reliant les positions initiale et finale). Si un obstacle intervient en
cours du chemin, détecté par les ultrasons placés sur
l'avant du robot, il est alors contourné. Des méthodes similaires
ont été développées au paravent considérant
le robot comme un point matériel et en utilisant d'autres
systèmes de perception, mais ayant toujours un principe semblable.
Une adaptation de la méthode de HUANG
permettant de prendre en compte les contraintes cinématiques du robot a
été testée avec succès.
L'avantage des méthodes utilisant cette approche
réside dans leurs efficacités en termes de temps de calcul qui
permet leurs utilisations dans des applications temps réel. En
18
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
revanche elles présentent l'inconvénient de
tomber dans des minima locaux et de générer une trajectoire
souvent non optimale.
I.8.5. Approche mixte:
L'intérêt de cette approche est de profiter des avantages des deux
approches précédentes, à savoir :
* Temps de calcul faible pour l'approche locale.
* Chemin généré optimal pour l'approche
globale.
L'idée de cette approche est de générer un
chemin optimal, en utilisant une méthode globale, donnant l'allure
générale de la trajectoire à suivre.
Ensuite, le robot exécutera cette trajectoire, à
l'aide d'un générateur local de trajectoire et de son
système de perception, tout en évitant de rentrer en collision
avec des obstacles imprévus au moment de la modélisation
(changements éventuels de l'environnement, obstacles mobiles) [10].
I.8.6. Approches réactives: Les
approches réactives consistent à calculer à chaque pas de
temps (après récupération des informations sur
l'environnement fournies par les capteurs du système) le contrôle
instantané à appliquer sur les actionneurs du système
[11]. I.8.6.1. Planification de mouvement partiel:
Une dernière approche réactive mérite d'être
notée : il s'agit de la planification de mouvement partiel (en anglais :
Partial Motion Planning - PMP utilisée. Celle-ci consiste à
calculer relativement, en un temps de décision fixe, une trajectoire se
rapprochant le plus possible du but. Cette méthode consiste en un
algorithme à trois étapes répète à chaque
pas de temps :
* Mise à jour du modèle de l'environnement
à partir des entrées capteurs du robot.
* Recherche délibérative d'une trajectoire
menant à l'état but. Si le but n'a pas été Atteint
après un temps de décision fixe, la trajectoire calculée
s'en rapprochant le plus est choisie comme trajectoire à suivre.
Enfin, le mouvement planifie au pas de temps
précédent est exécuté. Cette approche permet donc
d'être réactive aux diverses évolutions de l'environnement
tout en étant capable de sortir des impasses non
d'détectées à priori. Elle reste sujette à des
minima locaux, mais en est néanmoins bien plus robuste que les approches
citées précédemment [11].
I.8.6.2. Histogramme de champs de
vecteurs: Dans la lignée des approches par champs de
potentiels, sont apparus les histogrammes par champs de vecteurs (en anglais :
Vector Field Histogram - VFH). Ceux-ci, introduits par Koren et Borenstein sont
nés de la combinaison des champs de potentiels et des grilles
d'occupation [11] :
19
Chapitre I : Généralités Sur Les Robots
Mobiles
Robot Mobile Avec Suivi Visuel De Ligne
Un histogramme basé sur une grille cartésienne de
l'environnement est construit et mis à jour au fur et à mesure de
la navigation afin de reporter la présence d'obstacles à
proximité du robot. Afin de choisir une direction à suivre, un
histogramme polaire est construit à partir de la grille d'occupation :
en discrétisant les différentes directions possibles autour du
robot, l'histogramme polaire est construit en pondérant pour chaque
secteur de la discrétisation polaire les cellules traversées de
la grille d'occupation contenant des obstacles.
Une fois cet histogramme polaire construit, des
»vallées candidates» sont d'exterminés comme les suites
de secteurs contigus de l'histogramme polaire libres d'obstacles La direction
à prendre par le système est alors déterminée par
le milieu de la vallée menant le plus directement au but.
Initialement conçue pour la navigation de robots holonomes
(pouvant naviguer dans toutes les directions), cette méthode a
été étendue à plusieurs reprises afin de prendre en
compte les dimensions du robot (par un espace de configuration implicite) et
ses contraintes de vitesse.Plus tard, les VFH ont été
combinés à une recherche A* (VFH*) afin de trouver un chemin
menant vers le but et d'échapper ainsi aux minima locaux.
Les méthodes VFH disposent néanmoins encore de
fortes limitations : Elles ne prennent en compte ni la dynamique du
système robotique, ni l'éventuelle présence d'obstacles
mobiles ; le mouvement instantané du robot est calculé uniquement
à partir des informations sur la position courante des obstacles. Leur
vitesse n'est en aucun cas considérée.
I.9. EVITEMENT REACTIF D'OBSTACLES:
Dans cette partie, nous faisons un bref état de l'art des
principales méthodes d'évitement réactif d'obstacles afin
de mettre en lumière leurs avantages et leurs limites par rapport aux
spécificités de notre problématique.
I.9.1. Méthodes analytiques:
Même en l'absence d'obstacles, commander un système non holonome
pour l'amener d'une configuration de départ a une configuration
d'arrivée n'est pas une chose aisée. En effet, il n'existe pas
aujourd'hui d'algorithme général permettant de résoudre le
problème pour n'importe quel système non holonome.
Des méthodes analytiques sont connues seulement pour
certaines classes de systèmes. Pour les autres, on ne dispose que de
méthodes numériques. En outre, la présence d'obstacles
rend les méthodes analytiques inapplicables à des systèmes
non holonomes [9].
20
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles

1.9.2. Méthode de fenêtre
dynamique: Cette technique proposée dans travaille dans
l'espace des commandes du robot. La taille du domaine de recherche des vitesses
accessibles (c'est-a-dire n'entrainant pas de collisions) est réduite
par la prise en compte explicite du modèle cinématique du
système. Les commandes envoyées au robot sont le résultat
de la maximisation sur ce domaine de recherche d'une fonction cout liée
à la configuration finale.
L'utilisation de cette méthode est très
intéressante pour un robot se déplaçant rapidement ou pour
un robot ayant des capacités d'accélération et de
décélération limitées. Elle permet alors de
produire un déplacement du robot sur et régulier. Son extension
au cadre multi robots est cependant très délicate du fait de son
manque de flexibilité [4]. I.10. POURSUITE DE
TRAJECTOIRE:
Une fois la trajectoire du robot déterminée dans le
contexte de l'évitement d'obstacle ou non, il faut pouvoir la suivre. Le
problème de suivi d'une trajectoire de référence pour un
robot mobile non-holonome est apparu comme un problème de premier ordre
pour la communauté roboticienne dans ces dernières
années.
En effet, la forte utilisation des robots mobiles dans les
domaines où l'être humain ne peut pas être présent,
notamment dans les sites nucléaires à haut risque ou dans le cas
de l'exploration spatiale, nécessite la mise en oeuvre de lois de
commande autonomes et performantes pour assurer les tâches
assignées aux robots. Plusieurs travaux concernant la poursuite de
trajectoire ont été développés dans ce contexte.
Après une rapide formalisation de ce problème, une liste non
exhaustive des différentes commandes disponibles dans la
littérature est présentée [4].
Formulation du problème: Une
propriété des modèles de robot mobile non-holonome (de
type voiture ou uni-cycle) est qu'ils ne sont pas stables par un retour
d'état continu et stationnaire. Ce corollaire est le
résultat des travaux de [4].
Figure. I.17 : Poursuite de trajectoires
admissibles.
21
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
I.11. EXEMPLES D'APPLICATIONS:
Aujourd'hui, le marché commercial de la robotique mobile
est toujours relativement restreint, mais il existe de nombreuses perspectives
de développement qui en feront probablement un domaine important dans le
futur.
Les applications des robots peuvent se trouver dans de nombreuses
activités "ennuyeuses, salissantes ou dangereuses" (3 D's en anglais
pour Dull, Dirty, Dangereuse), mais également pour des applications
ludiques ou de service, comme l'assistance aux personnes âgées ou
handicapées. Parmi les domaines concernés, citons [12] :
La robotique de service (hôpital, bureaux).
La robotique de loisir (aibo, robot 'compagnon').
La robotique industrielle ou agricole (entrepôts,
récolte de productions agricoles, mines).
La robotique en environnement dangereux (spatial, industriel,
militaire).
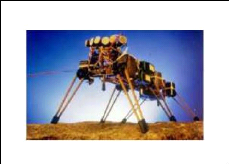
Figure. I.18 : Genghis,
développé par Rodney Brooks au MIT au début des
années 1990.
A cela, s'ajoute à l'heure actuelle des nombreuses
plates-formes conçues essentiellement
Pour les laboratoires de recherche.
La Figure. I.19 montre quelques exemples de
robot réels
22
Robot Mobile Avec Suivi Visuel De Ligne

Chapitre I : Généralités Sur Les Robots
Mobiles
Figure. I.19: Exemples de robots
utilisés dans différentes applications.
I.12. LES TACTIQUE DE NAVIGATION DES ROBOTS
MOBILES:
On peut classer ces tactiques en trois groupes, suivant que le
robot ne connait rien de son univers de déplacement (robots
télémétriques sans mémoires), qu'il le connait
totalement (univers connu) ou qu'il le découvre au fur et à
mesure de son déplacement (navigation optimisée et interactive
avec l'environnement) [8].
I.12.1. Robots télémétriques
sans mémoire: Il s'agit de robots qui cherchent à
se déplacer dans un univers inconnu pour atteindre un but, en
évitant les obstacles à l'aide d'un
télémètre à courte ou à longue portée
(tactile, ultrasonore ou infrarouge).Pour ce faire, ils sont
munis des primitives suivantes:
Aller en ligne droite sur une longueur donnée.
Tourner d'un angle donné.
Viser au télémètre dans une direction
donnée.
23
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
Certains de ces robots peuvent se repérer par rapport au
but, à la fois en direction et en distance Comme ils n'ont pas la
mémoire de l'environnement, il n'est pas possible de planifier au
départ leur chemin, ni leur donner des informations sur cet
environnement.
Néanmoins ils possèdent quelques mots de
mémoires qui leur permettent de discriminer l'enchainement des taches
à accomplir.
I.12.2. Optimisation de trajectoires dans un univers
connu : Dans ce cas, l'univers, connu parfaitement, est
modélisé soit par une grille, soit par des polygones. La
modélisation par grille a été utilisée dans les
premiers travaux de recherche d'un chemin optimal car cette
représentation se prête bien à une programmation directe,
La robot occupant une case ou étant modélisés par des
cases hachurées.
L'univers est ainsi représenté par une matrice,
appelée matrice d'adjacence, dont les éléments sont 0 ou 1
suivant que le case correspondante est libre ou occupée par un obstacle
.Le déplacement du robot n'est en générale permis que
suivant quatre directions perpendiculaires (horizontales et verticale ou huit
directions (à 45 ), suivant une direction quelconque.
Dans le modèle des polygones, les obstacles sont
modélisés par des polygones dont il suffit de connaitre la
position des sommets pour que l'environnement soit parfaitement définit
.Dans cette représentation, qui requiert moins de mémoire que la
précédente, le chemin est constitué de segments joignant
différents sommets de polygones .Ce chemin sera optimal lorsque la somme
des couts des arcs constituant le chemin dans le graphe (dont les noeuds sont
les sommets des polygones) sera minimale.
I.12.3. Tactiques de navigation optimisées et
interactives avec l'environnement:
Ces tactiques s'appliquent aux cas réels fréquents
ou l'environnement du robot n'est pas entièrement connu, soit à
cause des limites de son organe de vision, soit parce que des obstacles ont pu
être ajoutés à l'environnement initiale
mémorisé, soit encore par suite de l'imprécision dans la
localisation du robot.
Il en résulte une combinaison des tactiques
décrites précédemment .Au départ étant
donné la connaissance de l'environnement dont dispose le robot, une
trajectoire optimale est planifiée et le robot commence à le
suivre .En cas de détection imprévue d'un obstacle,
le robot met en action son opérateur de vision pour
réactualiser son modèle d'environnement, puis la procédure
précédente est réitérée (optimisation, suivi
de la trajectoire, vision).
24
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
I.13. CONCLUSION:
La perception d'une part et la commande au sens large de l'autre
part sont donc les deux thèmes majeurs de recherche pour obtenir un
robot mobile parfaitement autonome. Parmi les problématiques
liées à la commande, celle de la navigation qui tient un
rôle important : elle consiste à déterminer les
trajectoires que le robot sera capable de suivre pour lui permettre
d'évoluer correctement au milieu d'obstacles.
25
Robot Mobile Avec Suivi Visuel De Ligne

Traitement d'images-Navigation
Chapitre II : Traitement D'images
Numérique-Navigation
II.1. INTRODUCTION:
Dans ce chapitre on se concentrera sur les concepts fondamentaux
du traitement d'images : historique, définition, Acquisition, domaine
d'application, nous avons présenté le différent type de
navigation, les représentations de l'environnement.
II. 2. HISTORIQUE DU TRAITEMENT D'IMAGES:
La technologie numérique moderne est devenue
omniprésente. Grâce à elle, il est devenu possible de
traiter des signaux multidimensionnels avec des systèmes très
divers, depuis les téléphones portables jusqu'aux ordinateurs
massivement parallèles. Dans le domaine des images, Le traitement des
images, opère une transformation image ' image.

Figure. II.1 : Développement de la
science traitement d'image depuis 1950 à 2005 [13].
II.3. VISUALISATION:
Une image réelle est obtenue à partir d'un signal
continu bidimensionnel comme par
exemple un appareil photo ou une caméra... Sur un
ordinateur, on ne peut pas représenter de signaux continus, on travaille
donc sur des valeurs discrètes [14].

26
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
II.3.1. Définition : Une image
numérique est définie comme un signal fini bidimensionnel
échantillonné à valeurs quantifiées dans un certain
espace de couleurs. Elle est constituée de points (pixels).
* Signal fini : une image
possède des dimensions finies, exemple : 640x480, 800x600 points...
* Signal bidimensionnel : une image
possède deux dimensions : largeur, hauteur.
* Signal
échantillonné: les pixels d'une image sont
régulièrement espacés sur une grille carrée.
* Valeurs quantifiées: les
valeurs des pixels appartiennent à un intervalle borné Connu.
* Espace de couleur: il existe de
nombreuses façons de percevoir les couleurs d'une

imag ace de représentation le plus connu est l'espace
RGB (rouge-vert bleu).
Autrement image est une matrice M X N de valeurs entières
prises sur un intervalle
borné 0, N est la valeur maximale du niveau de gris
[14].

Figure .II.2 : Le niveau de gris du
pixel.

p(i, j) Est le ni gris du pixel de coordonnées ligne i et
colonne j dans l'image.
p(i, j) E 0, N valeurs des niveaux de gris sont des entiers.
II.3.2. Image binaire: Une image
binaire est une image MxN où chaque point peut prendre uniquement la
valeur 0 u 1. Les pixels sont noirs (0) ou blancs (1). Le niveau de gris est
codé sur un bit. Avec N = 2 et la relation sur les niveaux de gris
devient: p (i, j) = 0 ou p(i,j) = 1.
II.3.3. Image en niveaux de gris : Une
image aux niveaux de gris autorise un dégradé de gris entre le
noir et le blanc. En général, on code le niveau de gris sur un
octet (8 bits) soit 256 nuances de dégradé. L'expression de la
valeur du niveau de gris avec Ng = 256 devient:

27
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
p(i,j) E [0, 255].
II.3.4. Image couleur : Une image
couleur est la composition de trois (ou plus) images en niveaux de gris sur
trois (ou plus) composantes. On définit donc trois plans de niveaux de
gris, un rouge, un vert et un bleu. La couleur finale est obtenue par
synthèse additive des ces trois (ou plus) composantes.

Figure.II.3 : Image couleur.
On a les relations sur les niveaux de gris: p_R(i,j) E[0, 255],
p_V(i,j) E[0, 255],
p_B(i, j) E[0, 255]. On voit bien sur la figure qu'une image
couleur est en fait l'association de trois plans de niveau de gris, chacun
d'eux étant une couleur de base [14].
II.3.5. Image à valeurs réelles
: Pour les images, le résultat peut ne pas être
entier, il est donc préférable de définir l'image de
départ et l'image résultat comme des images à valeurs
réelles [14]. En général, une image à valeurs
réelle est telle que le niveau de gris est un réel compris entre
0.0 et 1.0. On a dans ce cas pour une image à niveaux de gris
[14]:p (i, j) E[0.0, 1.0]. Pour une image couleur, la relation
devient p_R(i, j) E[0.0, 1.0],p_V(i,j) E[0.0, 1.0], p_B(i,j) E[0.0, 1.0].
II.4. ESPACE DE COULEURS:
La couleur est une donnée importante pour une image, elle
modifie la perception que l'on a de l'image. L'espace de représentation
standard décompose une image en trois plans de couleur:
RGB. Les couleurs finales sont obtenues par synthèse
additive de ces trois couleurs primaires.
Il existe cependant des problèmes qui peuvent
nécessité de changer d'espace de couleur pour percevoir
différemment l'image. Il y a des Images où la couleur importe
peu, par exemple des photographies de cellules vivantes (pseudo-transparentes),
des images

28
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
radar, des images satellites... Dans ce cas, l'espace
RGB n'est plus utilisé. On lui préfère
d'autres espaces comme HSV ou YCbCr
[14].
II.5. ACQUISITION: ECHANTILLONNAGE / QUANTIFICATION:
II.5.1. Effets de l'échantillonnage:
-Pixellisation [16] :
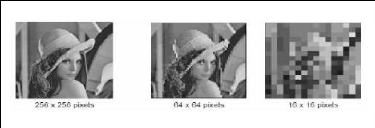
Figure. II.4 : Pixellisation.
Contours en marche d'escalier.
Perte de netteté.
Détails moins visibles/ moins précis.
Perte de résolution.
II.5.2. Effets de la quantification à l'acquisition
: [16]
CAN sur les systèmes d'acquisition d'images.
Codage de la valeur de chaque pixel sur N bits (En
général 8 bits).
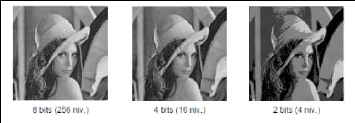
Figure .II.5 : Effets de la quantification
à l'acquisition.
Apparition de faux contours.
Bruit de quantification.
Effet visible à l'oeil en dessous de 6/7 bits.
Quantification sur 8 bits pour l'affichage.

29
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
II.5.3. Bruits lies à l'acquisition : Les images
sont souvent entachées de bruit, parfois non visible à l'oeil, et
qui perturberont les traitements [16].

Figure. II.6 : Les images sont prises dans
différent de bruits.
+ Optimiser les conditions d'éclairage.
+ Attention à l'éclairage ambiant.
+ Diaphragme ouvert = faible profondeur de champ. + Eclairage
important = dégagement de chaleur.
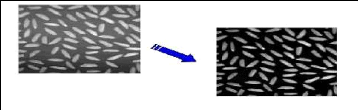
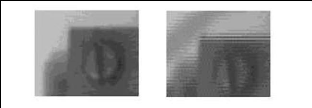
Figure. II.7 : Comparaison entre un
éclairage non uniforme et correction de l'éclairage.
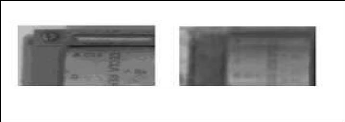
Figure .II.8 : Flou de
bougé/filé dû à un temps de pose/intégration
trop long.

30
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
Figure .II.9 : Effet de lignage dû au
balayage entrelacé des caméras vidéo.
Une bonne acquisition Des traitements
facilités
II.6.RECONNAISSANCE DE FORMES:
II.6.1. Définition : A partir
d'un nuage de points (pixels) obtenu après une phase de traitement, on
cherche à retrouver une forme connue a priori qui décrit «au
mieux» les points extraits [17].
II.6.2. Méthode approximation d'une droite
: Méthodes basées sur une approche par moindres
carrés obtenue à partir de la minimisation d'une distance.
Il existe de nombreuses méthodes pour résoudre ce
problème apparemment simple.
Approximation d'une droite
|
|
|
|
Approches Exactes
|
Approches par
Estimation
|
|
|
|
|
Figure. II.10 : Schémas
présente d'approximation d'une droite.
II.6.2.1. Méthodes exactes : On
considère que tous les points extraits participent avec le même
poids à la description de la droite.
II.6.2.2. Approximation par estimation robuste
: Recherche de la meilleure droite représentant au mieux
l'ensemble des points sous l'hypothèse d'un bruit entachant la position
des points [17].

31
Robot Mobile Avec Suivi Visuel De Ligne
II.7. Chapitre II : Traitement D'images
Numérique-Navigation
DOMAINES D'APPLICATION: Permet ces domaines [16]
:
* Contrôle industriel.
* Robotique.
* Télédétection.
* Multi media.
* Médecine.
II.8. TRAITEMENT D'IMAGE ET PERCEPTION
VISUELLE:
Une difficulté fondamentale de la vision artificielle
vient du manque de connaissance profonde des mécanismes qui
régissent la compréhension des images dans la nature. La vision
humaine est en effet extrêmement performante (déplacement,
lecture, reconnaissance), mais nous n'avons aucun retour conscient sur les
mécanismes mis en jeu (à la différence du jeu
d'échec par exemple).
En cela l'étude des mécanismes physiologiques
et psychologiques de la vision est une source très importante
d'information, et d'inspiration [13].
II.9. LES DIFFERENTS TYPES DE NAVIGATION:
II.9.1 Guidage: Cette capacité
permet d'atteindre un but qui n'est pas un objet matériel
directement visible, mais un point de l'espace
caractérisé par la configuration spatiale d'un ensemble d'objets
remarquables, ou amers, qui l'entourent ou qui en sont voisins [12] .
Ø La stratégie de navigation, souvent une
descente de gradient également, consiste
alors à se diriger dans la direction qui permet de
reproduire cette configuration. Ø Cette capacité semble
utilisée par certains insectes, comme les abeilles, et a
été
utilisée sur divers robots.
Ø Cette stratégie utilise également des
actions réflexes et réalise une navigation locale qui requiert
que les amers caractérisant le but soient visibles.
II.9.2. Action associée à un lieu
: Cette capacité est la première capacité
réalisant une navigation globale, c'est-à-dire qui permette de
rejoindre un but depuis des positions pour lesquelles ce but ou les amers qui
caractérisent son emplacement sont invisibles [12].
ü Elle requiert une représentation interne de
l'environnement qui consiste à définir des lieux comme des zones
de l'espace dans lesquelles les perceptions restent similaires, et à
associer une action à effectuer à chacun de ces lieux.

32
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
V' L'enchaînement des actions associées
à chacun des lieux reconnus définit une route qui permet de
rejoindre le but.
V' Ces modèles permettent donc une autonomie
plus importante mais sont limités à un but fixé.
V' Une route qui permet de rejoindre un but ne pourra
en effet pas être utilisée pour rejoindre un but
différent.
V' Changer de but entraînera l'apprentissage d'une
nouvelle route, indépendante des routes permettant de rejoindre les
autres buts.
II.9.3. Navigation topologique: Cette
capacité est une extension de la précédente qui
mémorise dans le modèle interne les relations spatiales entre les
différents lieux [12].
· Ces relations indiquent la possibilité de se
déplacer d'un lieu à un autre, mais ne sont plus associées
à un but particulier. Ainsi le modèle interne est un graphe qui
permet de calculer différents chemins entre deux lieux arbitraires.
· Ce modèle ne permet toutefois que la planification
de déplacements parmi les lieux connus et suivant les chemins connus.
II.9.4. Navigation métrique:
Cette capacité est une extension de la précédente car elle
permet au robot de planifier des chemins au sein de zones inexplorées de
son environnement. Elle mémorise pour cela les positions
métriques relatives des différents lieux, en plus de la
possibilité de passer de l'un à l'autre.
Ces positions relatives permettent, par simple composition de
vecteurs, de calculer
une trajectoire allant d'un lieu à un autre, même si
la possibilité de ce déplacement n'a pas été
mémorisée sous forme d'un lien [12].
II.10. CARACTÉRISTIQUE:
En robotique mobile, comme pour l'homme ou certains animaux,
l'utilisation de cartes est quasiment indispensable pour permettre d'effectuer
des tâches de navigation dans des conditions environnementales complexes,
qui ne sont pas spécialement adaptées pour le robot.
La construction et l'utilisation de telles cartes posent
cependant de nombreux
problèmes, notamment pour garantir l'adéquation
entre la carte et le monde réel. Pour cette raison, la plupart des
robots trouvent aujourd'hui un compromis entre une approche

33
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
réactive et une approche utilisant une carte afin de
bénéficier de la rapidité et de la
robustesse de la première et de la capacité de
déplacement à long terme de la seconde [12].
II.11. LES REPRÉSENTATIONS DE
L'ENVIRONNEMENT: II.11.1. Carte
topologique:
II.11.1.1. Description:
Représenter l'environnement du robot sous forme de graphe: Les noeuds du
graphe correspondent à des lieux, c'est-à-dire des positions que
le robot peut atteindre et Les arêtes liant les noeuds marquent la
possibilité pour le robot de passer directement d'un lieu à un
autre et mémorisent en général la manière de
réaliser ce passage.
La détection et la mémorisation des lieux reposent
en général sur deux procédures qui utilisent les
perceptions : La première permet simplement de comparer deux perceptions
et donc de reconnaître un lieu de la carte ou de détecter un lieu
nouveau et La seconde procédure permet de mémoriser un nouveau
lieu ou d'adapter la définition d'un lieu lors des passages successifs
du robot en ce lieu.
La première procédure peut donner des
résultats erronés. Par exemple, un lieu déjà
visité peut ne pas être reconnu, ou un lieu nouveau peut
être confondu avec un lieu déjà mémorisé.
Pour résoudre ces problèmes, la reconnaissance des lieux fera
donc appel aux données proprioceptives en plus des perceptions [12].
II.11.1.2. Avantage : Un avantage important des
cartes topologiques est qu'elles ne
requièrent pas de modèle métrique des
capteurs pour fusionner les données proprioceptives et les perceptions
au sein d'une représentation unifiée de l'environnement.
Le bruit sur les mesures des capteurs influe principalement sur
la reconnaissance des lieux, tandis que le bruit sur les données
proprioceptives influe principalement sur la position associée à
chaque lieu.
La mémorisation de l'environnement sous forme d'un
ensemble de lieux distincts autorise en général une
définition des lieux plus directement reliée aux capacités
perceptives du robot.
Il n'y a pas de limitation au type de capteurs utilisables, Cette
utilisation directe des perceptions permet meilleure mise en relation du robot
avec son environnement.

34
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
La discrétisation de l'environnement correspondant au
choix des lieux représentés dans la carte est un autre point fort
des cartes topologiques. Cette discrétisation est en effet très
utile pour la planification des mouvements du robot, qui se réduit alors
à la recherche de chemin dans un graphe [12].
II.11.1.3. Inconvénient :
Nécessitent en général une exploration
très complète de l'environnement pour le représenter avec
précision.
Représentant des lieux avec une assez grande
densité spatiale, cela peut être un inconvénient, car
l'exploration complète de l'environnement demandera un temps
important.
La reconnaissance des lieux de l'environnement peut
également être difficile dans le cas de capteurs très
bruités, ou d'environnements très dynamiques. Il devient alors
très difficile d'estimer correctement la position du robot au sein de
cette carte et de lui ajouter de nouvelles informations sans erreurs.
La représentation de l'environnement peut être assez
proche des données brutes des capteurs du robot, ce qui peut être
un avantage du point de vue de l'autonomie du robot [12].
II.11.1. Carte métrique:
II.11.2.1. Description: L'environnement
est représenté par un ensemble d'objets auxquels sont
associées des positions dans un espace métrique,
généralement en deux dimensions.
Cette espace est, la plupart du temps, celui dans lequel
s'exprime la position du robot estimée par les données
proprioceptives qui permettent, en utilisant un modèle
métrique des capteurs, de détecter ces objets et
d'estimer leur position par rapport au robot.
La position de ces objets dans l'environnement est alors
calculée en utilisant la position estimée du robot.
Carte de l'environnement correspond directement à l'espace
libre, c'est-à-dire à l'espace dans lequel le robot peut se
déplacer [12].
II.11.2.2. Avantage : Représente
l'ensemble de l'environnement, Et non un petit sous-ensemble de lieux comme le
font les cartes topologiques.

35
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
La position du robot est définie de manière non
ambiguë par ses coordonnées au sein de l'espace dans lequel la
carte est représentée.
Il s'ensuit une utilisation simple et directe de toutes les
informations métriques fournies par les données proprioceptives
ou les perceptions [12].
II.11.2.3. Inconvénient: Le
calcul de chemin au sein des cartes métriques peut être plus
complexe, car la planification se déroule dans un espace continu et non
dans un espace préalablement discrétisé, comme c'est le
cas pour les cartes topologiques.
De nombreux modèles recourent d'ailleurs à
l'extraction d'une carte topologique depuis la carte métrique pour
réaliser cette opération de planification [12].
II.12. DOMAINES D'APPL ICAT ION:
Objectif de créer des modèles riches de
l'environnement qui peuvent avoir plusieurs utilisations. Ils peuvent notamment
permettre à un opérateur distant d'avoir une bonne
compréhension de l'environnement du robot, ou au robot d'avoir un
comportement plus adapté à son environnement [18].
II.13. MODÉLISATION DU CHEMIN PAR LA
FORME:
Beaucoup d'applications de vision par ordinateur ont pour but la
reconnaissance d'objets. Dans ces applications, la forme joue un rôle
fondamental surtout quand d'autres attributs comme la couleur et la texture ne
donnent pas d'information complémentaire suffisante sur la nature de
l'objet. Par exemple, si nous parvenons à identifier (par couleur et
texture) une région du type chemin sur la scène, nous ne savons
rien sur sa catégorie (i.e., s'il s'agit d'un chemin « tout droit
», d'un « virage à gauche », d'un « virage à
droite », d'une « bifurcation », d'une «intersection
», etc.) ce qui peut être déterminées de
manière naturelle en utilisant la forme. L'apparence d'un objet est en
effet, largement caractérisée par des mesures de dimensions
physiques basées sur la forme.
Il n'y pas de définition universelle pour décrire
ce qu'on appelle la « forme ».
Chez l'homme, l'impression de forme est
généralement accompagnée par des informations de couleur
et d'intensité (texture) qui permettent de faire émerger une
représentation géométrique caractéristique de
l'objet. Ainsi, l'identification des objets est réalisée de

36
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
manière courante en utilisant leurs
propriétés visuelles ; nous définissons la forme comme
un modèle géométrique constitue par un
ensemble de points, courbes, surfaces solides, etc.
La mise en correspondance des formes va nécessiter leur
transformation dans un espace de représentation dans lequel nous
pourrons les comparer, trouver leurs ressemblances, en utilisant certaine
mesure de similarité [19].
II.13.1. Représentation de la forme des objets
: L'un des principaux problèmes pour la reconnaissance
automatique des formes consiste à déterminer une
représentation ou description convenable à cet effet. Elle doit
être à la fois unique pour l'objet étudie et capable
d'accepter certaines variations pour caractériser les
éléments d'une même classe.
Les schémas de représentation de formes doivent
satisfaire quelques propriétés pour donner des résultats
satisfaisants : invariance a la translation, à la rotation et aux
changements d'échelle. Par définition, ce type de transformations
ne modifient pas la forme de l'objet et c'est plutôt en utilisant les
transformations affines que l'on peut obtenir une certaine indépendance
au point de vue.
D'autres facteurs peuvent gêner la mise en correspondance
de formes dans des scènes naturelles, par exemple les occultations et la
variation dans l'éclairage de l'objet. Dans notre application, les
objets de l'arrière-plan comme les arbres, les bâtiments, les
voitures ou les poteaux ont une forte influence sur l'aspect (la forme) des
chemins. Par conséquent, il est important de modéliser non
seulement les propriétés d'un objet mais également les
relations entre ceux-ci et les objets du fond de la scène.
Les différentes représentations possibles pour
définir la forme des objets 2D, peuvent être classifies suivant
les caractéristiques qu'elles utilisent :
II.13.1.1. APPROCHES GLOBALES.
·
* surface, périmètre, largeur,
hauteur,
* moments invariants, moments de Zernike,
* morphologie mathématique,
* élongation, circularité,

37
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
II.13.1.1.2. APPROCHES LOCALES:
§ Coins ou sommets (position, angles, . . .).
§ Segments (position, longueur, . . .).
§ Facettes ou régions (position, surface, couleurs,
texture, . . .), en utilisant les
contours de l'objet, squelette.
§ Représentation par des histogrammes (Shape Context,
signature polaire).
§ Descripteurs de Fourier, représentation par
vecteurs propres, splines ...
La reconnaissance des objets 2D est menée par des
méthodes différentes :
· Appariement de gabarit « template matching» :
les objets à détecter sont représentés par des
échantillons (imagettes) ou gabarits (templates). L'image
étudiée est balayée avec le template en comparant les
pixels du template à ceux de la portion de l'image recouverte.
Une mesure de comparaison du type coefficients de
corrélation ou somme de différences
(Maximales ou absolues) sert à quantifier la
similarité entre les template et une portion de l'image.
· Méthodes basées sur l'apparence (en
exploitant l'espace propre)
· Méthodes fondées sur des
caractéristiques : Arbres d'interprétation, alignement etc.
La catégorisation d'un chemin perçu dans une
scène doit utiliser une représentation qui exploite le contour de
la région correspondante de l'image.
Le descripteur choisi pour représenter la forme d'un
chemin est appelée Shape Context, considère comme une alternative
fiable de classification et d'identification d'objets à partir de leurs
points de contour. Du fait de la polyvalence et de la richesse de ce
descripteur, nous l'avons adopté pour la classification et la
catégorisation de chemins (de terre, goudronne...) à partir de
leurs caractéristiques morphologiques (carrefours, lignes droites,
intersections en T, impasse, virages, etc.). Notre principale motivation vise
l'exploitation des intersections détectes dans un réseau de
chemins, pour la construction d'une carte topologique exploitée ensuite
pour la navigation autonome.

38
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
II.13.2. Catégorisation des chemins par shape
context: La signature polaire d'une forme, décrite par un
ensemble de points, est donnée par la distribution grossière de
la forme par rapport à un point de référence ; la
distribution est représentée par un histogramme polaire des
points de la forme autour du point de référence.
Le descripteur Shape Context est l'ensemble des signatures
polaires de la forme par rapport à chacun des points qui la
décrit. La mise en correspondance entre deux formes décrites par
Shape Context, se fait en deux étapes :
(1) on rechercher pour chaque point échantillon sur une
forme, le point échantillon sur l'autre qui a la signature polaire la
plus semblable.
(2) La maximisation de similarités globales de tous les
points est résolue par l'optimisation d'un graphe bipartite.
Cette méthode n'impose aucune restriction sur les
propriétés inhérentes des points représentant la
forme. C'est-à-dire qu'ils ne correspondent pas à des points de
courbure, ni à des maxima, des minima, des points d'inflexion, etc. Pour
la simplicité algorithmique, nous avons préféré
travailler avec des points uniformément sépares.
D'après nos expériences sur l'extraction de
contours issus des scènes naturelles, ou les bords des régions
sont souvent assez irréguliers, cette approche nous semble assez souple
pour la représentation des chemins.

II.14. MODÉLISATION ET CATÉGORISATION DE
CHEMI
II.14. finition chemin : Un chemin
entre une situation initiale e situation
finale une représentation géométrique du
d'emplacement du corps qui ne considère
pas le temps [9].
II.14.2. Indexation de chemins par la forme
: Pour l'indexation de chemins à partir de la forme des
régions étiquètent Chemin dans les images, nous ne
stockons que les points de contours lisses de ces régions. Les
descripteurs « Shape Context» sont calcules pour toutes les images de
la base de données, et stockées en mémoire pour leur
réutilisation.
Le but de l'indexation est de ranger ces descripteurs dans une
structure qui permette de retrouver facilement les descripteurs
approximativement égaux a un descripteur donne. Nous avons un
critère de comparaison du type plus proche voisin entre les descripteurs
de

39
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
la base de données et celui de la région à
identifier, i.e., la forme apprise ayant la distance la plus petite a la forme
a classifier.
En conclusion, nous considérons possible d'exploiter cette
technique d'indexation, comme élément additionnel dans la
navigation autonome et la construction de cartes topologiques. Pour ce faire,
les chemins caractéristiques rencontres dans la nature (disons :
carrefours, intersection, virages, etc.) sont pré-classifies en tant
qu'ayant des propriétés semblables, ce qui va nous permettre
d'augmenter la base de données.
La catégorisation d'un chemin devient alors le processus
d'indexation de cette forme dans notre base de données [19].
II.15.CONCLUSION :
On a commencé ce chapitre par une bref historique sur la
science de traitement d'image ensuite on a présenté une notion de
base de traitement d'image numérique, l'espace de couleurs,
l'acquisition d'image et comment reconnaitre la forme aussi sont domaine
d'application, traitement d'image et la perception visuelle.
Nous avons implanté les différents types de
navigations comme le guidage, l'action associe à un lieu la navigation
topologique et métrique.

40
Robot Mobile Avec Suivi Visuel De Ligne

Réalisation pratique
Chapitre III: Réalisation
Pratique
III.1. INTRODUCTION:
L'objectif de ce travail et rendre d'un robot mobile capable de
suivre visuellement une ligne dans un terrain.
Ce chapitre est composé de trois parties:
Dans la première partie on fait une description
mécanique du robot mobile. La deuxième partie est
consacrée à la partie électronique.
Dans la troisième partie, on présente les
différentes procédures et programmes utilisés pour la
commande du robot.
III.2. LA MÉCANIQUE:
La partie mécanique se compose:
· D'un châssis.
· D'un bloc équipé de deux moteurs.
· D'une roue libre.
La partie de commande comprend:
ü Une camera (webcam). ü Une carte Arduino Uno.
III.2.1. Le châssis : On a
utilisé cette configuration (robot mobile à roue
différentielle) à cause de sa simplicité.
III.2.2. Principe de fonctionnement:
La camera détecte la position du robot par rapport à la ligne
jaune tracé sur la piste et transmettent cette commande à
Notebook, ce dernier envoyé la commande à la carte Arduino Uno
pour commander les deux moteurs CC.
III.2.3. Structure du système:
le robot mobile est composé d'une plate forme mobile capable de porter
les composants du système .La plate forme utilisée est
très simple composée d'un châssis, deux moteurs et une roue
de commande libre.
III.3. L'ÉLECTRONIQUE:
III.3.1. Alimentation :
L'unité d'alimentation du robot se compose d'une batterie 12V :

41
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre III: Réalisation Pratique
Un régulateur 7805a été utilisé
pour obtenir une tension régulée très stable de +5V pour
l'alimentation de la partie logique du circuit L298.

Figure. III. 1 : Schéma de commande
des moteurs avec le circuit L298.
III.3.2. Commande des moteurs CC : Pour assurer le
déplacement du robot, on a utilisé deux moteurs CC .Ces dernier
fonctionnent sous une tension de 12V.
Le circuit intégré L298N à
été choisi pour commander les moteurs.

42
Robot Mobile Avec Suivi Visuel De Ligne

Chapitre III: Réalisation
Pratique
Figure. III.2 : Hacheur L298 [Annexe
A].

Figure .III.3 : Schéma interne du
L298 [Annexe A].
· Principales caractéristiques:
Tension d'alimentation du circuit logique : 5V
Tension d'alimentation du circuit puissance : 0V' 48V
Tension minimale de sensibilité MLI : 2.3V
Courant maximal du circuit puissance : 3A
III.3.2.1. Pont en H : Une structure
électronique servant à contrôler polarité aux bornes
d'un dipôle. Il est composé de quatre éléments de
commutation généralement disposés schématiquement
en une forme de H d'où le nom. Les commutateurs peuvent être des
relais, des transistors, ou autres éléments de commutation en
fonction de l'application visée.

43
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre III: Réalisation
Pratique
Le pont en H (Voir la Figure. III.4) permet de
contrôler la polarité de la tension aux borne du moteur, ou de
déconnecter l'alimentation des moteurs (moteur arrêté). Les
commutateurs sont actionnés deux par deux soit S1-S4 ou S2-S3 pour faire
tourner le moteurs dans un sens ou dans l'autre sens. Les paires de relais
peuvent avoir des puissances différentes selon que l'utilisation ne
requiert pas le même couple dans un sens que dans l'autre sens.
De plus, le pont en H permet d'effectuer un freinage
magnétique s'il est capable d'en dissiper la puissance
générée. Cette opération s'effectue en actionnant
soit les deux commutateurs supérieurs ou inférieurs en même
temps, ce qui court -circuit les bornes du moteur et le fait par
conséquent freiner.
Les états d'un pont en H sont représentés
sur le Tableau .III.2.
Moteur
|
Commutateur
|
0 : commutateur ouverte
1 : commutateur fermée
|
|
S2
|
S3
|
S4
|
|
0
|
0
|
0
|
0
|
|
1
|
0
|
0
|
1
|
|
0
|
1
|
1
|
0
|
|
1
|
0
|
1
|
0
|
|
1
|
0
|
1
|
|
Tableau .III.2 : Table de
vérité de pont en H.

Figure .III.4 : Etat d'un pont en
H : (a) Moteur déconnecté, (b) Rotation ou sens1, (c) Rotation
inverse ou sens inverse.

44
Chapitre III: Réalisation
Pratique
Robot Mobile Avec Suivi Visuel De Ligne
III.3.2.2. Réalisation de module de commande
des moteurs à CC : Le module de commande utilise un
circuit L298N comme double pont en H pour la commande des deux moteurs dans les
deux directions (dans le sens des aiguilles d'une montre, et le sens inverse
des aiguilles d'une montre), huit diodes ont été utilisées
pour former deux ponts en diode pour la protection de circuit L298N contre les
surtensions provoquées par les charges inductives.
Les entrées IN1, IN2, IN3 et IN4 du circuit L298N sont
utilisées pour commander le sens de la rotation du moteur 1 et du moteur
2 respectivement.
Les broches ENA et ENB sont directement reliées aux
sorties (PWM) du MCU pour commander la vitesse du robot par un signal PWM.
Les broches SENSA et SENSB doivent être liées
à la masse directement ou a travers
une petite résistance. En utilisant une petite
résistance et en connectant le SENSX on peut vérifier si les
moteurs sont surchargés ou si le L298N consomme un courant important.
Un connecteur est utilisé pour la connexion du module de
commande avec la carte de commande : carte Arduino UNO.
III.3.4. La carte Arduino Uno :
III.3.4.1. Définition : Arduino
Uno est une carte microcontrôleur basée sur l'ATmega328. Elle est
dotée de 14 broches en Entrées /Sortie numérique (dont 6
peuvent être utilisées comme sorties PWM-Modulation de largeur
d'impulsion), 6 entrées analogiques, un oscillateur à quartz
16MHZ, une connexion USB, un jack d'alimentation, un support ICSP, un bouton
`reset'.
Elle contient tout le nécessaire pour fonctionner; il
suffit de la connecter à un ordinateur par le câble USB et de
l'alimenter à l'aide d'un adaptateur USB ou des piles.
La carte Arduino Uno peut être alimentée par l'USB
ou par une alimentation externe. La source est sélectionnée
automatiquement.
La tension d'alimentation extérieure (hors USB) peut
être délivrée par un adaptateur AC-DC ou des piles.
L'adaptateur peut être connecté grâce à un `jack' de
2.1 mm positif au centre.

45
Chapitre III: Réalisation
Pratique
Robot Mobile Avec Suivi Visuel De Ligne
Le raccordement vers un bloc de piles peut utiliser les bornes
Gnd et Vin du connecteur d'alimentation (POWER).
La carte peut fonctionner à l'aide d'une tension
extérieure de 7 à 12 volts.
Les broches (pins) d'alimentation sont les suivantes :
· VIN: C'est la tension lorsque la carte est
raccordée à une source extérieure (par opposition à
la tension de 5 volts venant de l'USB ou d'un régulateur de tension).
· 5V : La tension d'alimentation régulée :
elle peut venir de VIN via le régulateur sur la carte, ou être
fournie par l'USB ou un régulateur extérieur. Le courant maximum
est de 50 mA.
· GND : Masse.
La carte Uno diffère des précédentes cartes
en ce qu'elle n'utilise pas le ship convertisseur USB-Série, FTDI, mais
le microcontrôleur ATmega8U2-sur la carte - programmée comme
convertisseur USB-Série.
«Uno « signifie « Un« en italien et ce nom
annonce la sortie de l'Arduino 1.0.
Les principales caractéristiques de l'Arduino
Uno
|
Microcontrôleur
|
ATmega328
|
Tension de fonctionnement
|
5V
|
Tension d'Input (recommandée)
|
7-12V
|
Tension d'Input (limites)
|
6-20V
|
Pins I /O digitales
|
14(dont 6 sont des PWM-
modulation de largeur d'impulsion)
|
Pins Input Analogiques
|
6
|
Courant DC par pin I/O
|
40mA
|
Courant DC pour la broche 3.3V
|
50mA
|
Mémoire flash
|
32KB (ATmega328) dont 0.5KB utilisé par le
`bootloader'
|
SRAM
|
2KB5ATmega328)
|
Fréquence d'horloge
|
16MHz
|
|
Tableau.III.4 : Les principales
caractéristiques de l'Arduino Uno.

46
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre III: Réalisation
Pratique
III.3.4.2 Entrées / Sorties:
Chacune des 14 broches digitales de la Uno peut être
utilisée en entrée ou sortie, en utilisant les fonctions
pinMode(), digitalWrite(), et digitalRead().
Elles fonctionnent en logique 0V-5V ; chacune pouvant fournir
(source) ou recevoir un courant maximal de 40 mA et dispose si besoin d'une
résistance interne de 'pull-up'. En outre, certaines broches ont des
fonctions spécialisées:
· Serial: 0 (RX) and 1 (TX). Permet de recevoir (RX) et de
transmettre (TX) des données séries TTL. Ces broches sont
raccordées à leurs homologues sur le chip ATmega8U2
spécialisé dans la conversion USB-to-TTL série.
· Interruptions externes 2 et 3. Ces broches peuvent
être configurées pour déclencher une interruption sur une
valeur LOW, sur un front montant ou descendant, ou encore sur le changement de
valeur.
· PWM: 3, 5, 6, 9, 10, and 11. Output 10-bits de PWM avec
la fonction analogWrite().
· SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Ces broches
fournissent le support de communication SPI en utilisant la 'library'
spécialisée.
· LED: 13. Il y a une LED connectée à la
broche digitale 13.
La carte Uno a 6 broches d'entrées analogiques, A0
à A5, chacune avec 10 bits de résolution.
Par défaut les mesures sont effectuées de la masse
à 5V (valeur de référence), mais il est possible de
spécifier la valeur de référence en utilisant la broche
VREF et la fonction analog Reference().
En outre, certaines broches ont des fonctions
spécialisées :
· I2C: 4 (SDA) and 5 (SCL). Permettent le support du bus
I2C (TWI) en utilisant la 'library' Wire.
Il y a encore quelques autres broches sur la carte:
· AREF. Tension de référence
déjà mentionnée.
· Reset. Permet au niveau bas (LOW°) de faire un reset
du contrôleur. Elle est utilisée typiquement pour monter un bouton
'reset' aux cartes additionnelles ('shields') bloquant celui de la carte
principale.

47
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre III: Réalisation
Pratique
III.3.4.3 Communication: La carte
Arduino Uno a de nombreuses facilités de communications avec un
ordinateur, une autre Arduino, ou un autre microcontrôleur. L'ATmega328
permet la communication série UART TTL, grâce aux broches
digitales 0 (RX) et 1 (TX).
Un contrôleur ATmega8U2 sur la carte, canalise cette
communication série vers l'USB et apparaît comme un port de
communication série virtuel pour le logiciel sur l'ordinateur. Le
firmware de l'8U2 utilise le protocole USB, et aucun driver externe n'est
nécessaire.
Logiciel de programmation de l'arduino uno :
· Le logiciel de l'Arduino inclut un moniteur série
permettant l'envoi et la réception de simples données textuelles.
Les leds RX et TX sur la carte clignotent pour indiquer la transmission de
données via le chip USB-to-serial vers l'ordinateur.
· Une bibliothèque 'SoftwareSerial' permet la
transmission de données série à partir de chacune des
broches digitales du Uno.
· L'ATmega328 supporte le bus I2C (TWI) et le protocole
synchrone maître-esclave SPI. Le logiciel de l'Arduino inclut un ensemble
de fonctions pour mettre en oeuvre ces fonctions.
Pour la réalisation de notre programme on a
utilisé le langage Python, et la bibliothèque open CV.
? Logiciel de programmation de l'arduino uno. Arduino IDE 1.0
pour Windows. III.4. PROGRAMMATION:
III.4.1 Python:
III.4.1.1. Définition : Python
est un langage de programmation très puissant qui est de plus en plus
utilisé pour développer des applications rapidement et en
même temps efficaces. Il est très utilisé dans le monde
scientifique pour sa syntaxe aérée et une vitesse
d'exécution rapide.
Ce langage est aussi excellent pour la création de
prototypes car sa simplicité permet d'implémenter un projet aussi
vite que l'on y réfléchit.

48
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre III: Réalisation
Pratique
III.4.1.2. Caractéristique du langage de
programmation (python):
· IL est portable, non seulement sur les
différentes variantes d'UNiX, mais aussi sur les OS
propriétaires: MacOS, BeOS, NeXTStep, MS-DOS et les différentes
variantes de Windows.
· Python est gratuit, mais on peut l'utiliser sans
restriction dans des projets commerciaux.
· Python convient aussi bien à des scripts d'une
dizaine de lignes qu'à des projets complexes de plusieurs dizaines de
milliers de lignes.
· La syntaxe de Python est très simple et,
combinée à des types de données évolués
(listes, dictionnaires,...), conduit à des programmes à la fois
très compacts et très lisibles. A fonctionnalités
égales, un programme Python est souvent de 3 à 5 fois plus court
qu'un programme C ou C++ (ou même Java) équivalent, ce qui
représente en général un temps de développement de
5 à 10 fois plus court et une facilité de maintenance largement
accrue.
· Peut être étendu avec des modules en C.
· Le langage Python est un langage de programmation complet
grâce aux nombreuses bibliothèques spécialisées,
appelées modules.
NumPy :
· NumPy est une extension du langage de programmation
Python, destinée à manipuler des matrices ou tableaux
multidimensionnels. Il contient:
· un objet puissant, tableau à N dimensions.
· Des outils pour l'intégration de C / C + + et
Fortran.
· l'algèbre linéaire, transformée de
Fourier.
SciPy :
· SciPy est un projet visant à unifier et
fédérer un ensemble de bibliothèques Python à usage
scientifique. Scipy utilise les tableaux et matrices du module NumPy. Cette
distribution de modules est destinée à être utilisée
avec le langage interprété Python afin de créer un
environnement de travail scientifique.
PySerial : est un module
d'accès au port série spéciale pour Python.
Pywin32: est un module de Python pour Windows
Extensions.

49
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre III: Réalisation
Pratique
III.4.1.3. Open CV :
Open CV (Open Computer Vision) est une bibliothèque
graphique libre, initialement développée par Intel,
spécialisée dans le traitement d'images en temps réel. La
société Willow Garage assure le support de cette
bibliothèque depuis 2010.
III.4.1.3.1. Fonctionnalités d'Open
CV: La bibliothèque Open CV met à disposition de
nombreuses fonctionnalités très diversifiées permettant de
créer des programmes partant des données brutes pour aller
jusqu'à la création d'interfaces graphiques basiques.
III. 4.2. L'interface graphique:
Après l'exécution du programme on obtient deux fenêtres sur
le bureau du PC :
La première permet le choix de la couleur de la ligne
à poursuivre par notre robot, et la deuxième permet d'afficher
les informations (comme la détection de la ligne, avancé, droite
et tourné à gauche,...).

Figure. III.5 : La première
fenêtre concerne la webcam.

50
Robot Mobile Avec Suivi Visuel De Ligne

Chapitre III: Réalisation
Pratique
Figure. III.6 : La deuxième
fenêtre montre la détection de la ligne.
Acquisition de l'image
Prétraitement
Détection de la ligne
Calcule de
commande

Robot Mobile
Webcam

Figure. III.7 : Schéma du principe
du système de commande.
III.5. CONCLUSION:
D'après les résultats obtenus et au cours de la
réalisation de ce robot on peut conclure que ce travail peut être
divisé en deux grandes parties, la partie software qui est basée
essentiellement sur la programmation en langage Python, et la partie hardware
qui est la réalisation de la partie électronique et
mécanique du robot. Le travail est l'intégration entre ces deux
parties pour la réalisation du robot capable de suivre en toute
autonomie la ligne tracé, et les résultats obtenus montrent que
le robot peut détecter et poursuivre la ligne détecté.

51
Robot Mobile Avec Suivi Visuel De Ligne
Conclusion générale et perspectives
Ce projet couvre un grand nombre de domaines
:
· La partie hardware : on a utilisé une carte de
commande Arduino uno, qui se caractérise essentiellement par la
programmation directe par un PC sans un programmateur, pour la commande de deux
moteurs DC 12V, ces composants sont monté sur le châssis du
robot.
· La partie software : on a utilisé le langage
Python, et la librairie open CV pour la réalisation de notre programme
après la configuration de ces deux logiciels et des autres modules
annexes.
Consiste à l'étude et la mise en oeuvre d'un robot
suiveur de ligne.
Ce travail exige la maîtrise de plusieurs notions
techniques aussi bien le domaine électronique et celui de
l'informatique, ce que fait que nous avons eu l'occasion à
découvrir, la programmation bas niveau par La carte Arduino
Uno, Langage PYTHON, et la
librairie Open CV.
D'après le planning que nous nous étions
fixés, on peut dire que nous sommes arrivés à terme du
projet dans le temps.
Au terme de notre travail, nous prévoyons des perspectives
:
Une première perspective on a besoin d'utilisés des
cameras de haute qualité à cause de la perturbation de
l'environnement (luminosité, les obstacles inévitables, ...)
Une deuxième perspective consiste à utilisés
une méthode de détection des objets basé sur les
couleurs.
Une deuxième perspective consiste à utiliser
d'autres capteurs pour permettre l'évitement d'obstacles.

52
Robot Mobile Avec Suivi Visuel De Ligne
BIBLIOGRAPHIE
[1] Melle AKLI Isma. «Elaboration d'une stratégie
de coordination de mouvements pour un manipulateur mobile redondant ».
MEMOIRE de MAGISTER, Université Houari Boumediene, Oran ,Alger, le : 14
/ 07 / 2007.
[2] A. ALLOUI, A.HAJ Brahim. « Proposition d'une
solution multi-agent pour la commande et la coopération multi-robot
mobile ».Mémoire d'ingénieur d'état en automatique,
Université Biskra, juin 2007.
[3] M. GHAOUI. « Planification d'un mouvement pour un
robot mobile »Thèse de magistère université de
Batna.année 1997.
[4] El-Hadi GUECHI. « Suivi de trajectoires d'un robot
mobile non holonome : approche par modèle flou de Takagi-Sugeno et prise
en compte des retards ». Thèse Doctorat présentée
à UNIVERSITÉ DE VALENCIENNES ET DU HAINAUT CAMBRÉSIS
Mention Automatique, le 28 juin 2010.
[5] A, Pruski , «Robotique mobile, la planification de
trajectoire», ED. Hermes, Paris 1996.
[6] C, Cappelle, El Badaoui El Najjar, M., Pomorski, D.,
Charpillet, F., "Détection, suivi Et géolocalisation
d'obstacles à l'aide d'un modèle 3D
géo-référencé, une caméra et Un GPS :
validation avec un lidar", Conférence Internationale
Francophone d'Automatique, CIFA'08, Bucarest, Roumanie, 3-5 Septembre, 2008.
[7] Yang Cheng, Maimone, M.W., Matthies, L. Visual odometry on
the Mars Exploration rovers- a tool to ensure accurate driving and science
imaging IEEE Robotics & Automation Magazine, Volume 13, Issue 2, June 2006.
Page(s):54 - 62.
[8] Hacéne ABERKANE & Khireddine Messaoudene,
« Mini robot mobile», MFE ingénieur, Université de
BATNA, 2001.
[9] Mohamed Selim BEN HIMANE. « Vers une approche
unifiée pour le suivi temps-réel et l'asservissement visuel
». Thèse Doctorat, L'ECOLE NATIONALE SUPERIEURE DES MINES DE PARIS,
le 06 Décembre 2006.
[10] Khiat Abdelaziz, Ouzaïd Saïd. « Etude de
la manoeuvrabilité d'un robot mobile autonome non-holonome
évoluant dans un espace restreint ». Mémoire
d'ingénieur d'état
en informatique de l'Institut National de formation en
Informatique (I.N.I) (ex: C.E.R.I.), Promotion 1997.
[11] Bouali Abdelmalek Ingénieur d'état en
électronique. « Planification de trajectoire pour un robot mobile
». Mémoire Présenté pour obtenir le diplôme de
magister Electronique, Université El-Hadj Lakhdar - BATNA - le : 30
/06/2012.
[12] David FILLIAT. « Robotique Mobile (cour) ».Ecole
Nationale Supérieure de Techniques Avancées:
[13] Antoine MANZANERA. « Cours TERI - Master IAD ».
UPMC Paris 6.
[14] Image Processing Toolbox. Version 2.2 (R11) 05-Aug-1998,
Release information.
[16] Antoine MANZANERA. « Traitement d'images et vision
artificielle ». Cours ENSTA .D9-2.
[17] Olivier bernard. « Traitement d'images
numérique ». Université INSA. LYON.
[18]

David Filliat. «Navigation, perception et apprentissage
pour la
robotique». Habilitation à Der des Recherches,
l'Université Pierre et Marie Curie, Paris, le 12 juillet 2011,
httpsww.google.dz/ david filliat les robotique mobile.
[19] JUAN GABRIEL AVI CERVANTES. « Navigation visuelle
d'un robot mobile
dans un environnement d'extérieure semi-structure
». Thèse Doctorat, de l'Institut National Polytechnique de
Toulouse, le 15 Février 2005.
| 

