3.3. Les familles d'actionneurs
Actionneur pneumatique : les actionneurs
pneumatiques sont utilisés principalement pour des mouvements
séquentiels simples ils utilisent de l'air comprimé à 6
bar et permettent de réaliser des vérins dont la force peut
atteindre 50000N. L'air est fourni par un compresseur, complété
de filtres, d'un séparateur d'eau et d'un déshuileur. Il est
souvent produit pour tous les ateliers, et distribué à toutes les
machines. Les actionneurs sont généralement des vérins
linéaires, mais aussi des moteurs rotatifs. On utilise également
des aspirateurs suceurs à vide pour saisir des objets. Ils sont
commandés en tout ou rein par des distributeurs, actionnés
mécaniquement ou électriquement.
Actionneur hydraulique : un actionneur
hydraulique est composé de deux parties : une partie vérin et une
partie valve. Dans un système à commande proportionnelle, on
place dans l'étage de pilotage (valve) une bobine
(solénoïde) qui régule la pression du fluide
proportionnellement à la consigne électrique (courant tension).
[27]

Figure 2.14 Actionneur hydraulique
Actionneur piézoélectrique :
c'est un convertisseur électrique-mécanique non
résonant qui est généralement utilisé pour
engendrer des microdéplacements. On les rencontre principalement en
microélectronique pour le positionnement des circuits
intégrés et en microscopie à effet tunnel pour
cartographier les surfaces des matériaux. En fait, physiquement, tous
les systèmes ont des fréquences de résonance. [23]
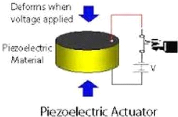
Figure 2.15 Actionneur piézoélectrique
31
Actionneur électromécanique :
est un transducteur assurant une conversion d'énergie et
d'information de la forme électrique à la forme mécanique.
Un actionneur électromécanique est aussi appelé moteur.
Selon les applications, l'aspect énergétique ou
la qualité du signal prime. Le rendement énergétique est
parfois déterminant. Dans d'autres cas, c'est le caractère
linéaire de la transformation qui importe. Dans d'autre cas encore,
c'est le temps de réaction ou la fréquence limite qui sont
déterminants. [22]
3.4. Les actionneurs électriques
3.4.1. Moteurs à courant continu Moteur DC à
aimant permanant :
Un moteur à courant continu à aimant permanent se
compose de trois éléments essentiels : Une partie fixe :
l'inducteur (stator) constitué d'un aimant permanent.
Une partie mobile : l'induit (rotor) comportant une ou
plusieurs bobines tournant dans le champ magnétique crée par
l'inducteur.
Le collecteur qui associé aux balais, permet de relier
les enroulements du rotor à l'extérieur du moteur.
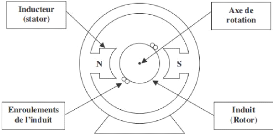
Figure 2.16 Vue en couple simplifiée
Principe de fonctionnement :
Rappel : Un conducteur parcouru par un
courant I et placé dans un champ magnétique B est soumis à
une force F appelé force de LAPLACE.
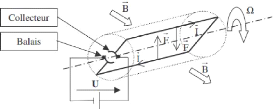
Figure 2.17 Perspective de l'induit simplifiée
Le sens de la force est donné par la règle des
trois doigts de la main droite : INdex INtensité / MAjeur
Magnétique / pouCE forCE

Figure 2.18 Règle de la main droite
Les deux forces de LAPLACE qui s'exercent sur la spire
créent un couple appelé couple
électromagnétique ( ) qui entraîne la
rotation du rotor.
De plus, en tournant dans le champ magnétique uniforme ,
la spire parcourue par le courant embrasse un flux qui varie dans le temps. D
`après la loi de FARADAY, toute variation de flux à travers une
surface entraîne une force électromotrice ( ) induite. Donc une
fem est induite le long de chaque spire.
Pour inverser le sens de rotation, il suffit d'inverser le sens
du courant dans la spire donc d'inverser la polarité de la tension
d'alimentation.
Le model électrique équivalant de l'induit
:

32
R : Résistance des enroulements de
l'induit (a). E : Force électromotrice
induite (V).
I : Courant traversant les spires de l'induit
(A). U : Tension d'alimentation de
l'induit(V). Equation électrique du moteur
:
La force électromotrice E est proportionnelle à la
vitesse de rotation du moteur ? (rad/s).
: est une constante qui dépend de caractéristique
de conception du moteur
Le courant est proportionnel au couple
électromagnétique .
: est une constante Remarque :
33
Couple moteur (couple utile) et couple de
pertes:
Le couple électromagnétique n'est pas égal
au couple moteur (ou couple utile )
disponible sur l'arbre du moteur. Il y a une perte de couple due
aux frottements des diverses
pièces en rotation et aux pertes fer (courants de
Foucault...). Pour un moteur donné est
constant :
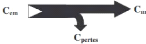
Figure 2.19 Les couples d'un moteur
Couple résistant:
Le couple résistant est le couple qu'exerce sur l'arbre,
la charge que le moteur doit entraîner en
rotation. Plus la charge est importante plus est important.
Bilan des puissances:
En multipliant par I des deux côtés du signe
égal, l'équation électrique nous donne :
: Puissance électromécanique
: Puissance dissipée par effet Joule
: Puissance électrique fournie au moteur
En multipliant par des deux côtés du signe
égal de l'équation on obtient :
: Pertes collectives
: Puissance électromécanique
: Puissance utile disponible sur l'arbre du moteur
Remarque :
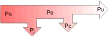
Figure 2.20 Bilan de puissance
Le rendement :
34
Moteurs DC avec un autre mode d'excitation :
Le moteur à courant continu excité par des aimants
permanents n'est pas le seul type possible.
Souvent on remplace les aimants par des électroaimants
fixes (bobines convenablement alimentées en courant continu). Les
bobines sont appelées «bobines d'excitation» ou «bobines
inductrices». On distingue généralement trois types de
moteurs selon le branchement envisagé:
Moteur à courant continu à excitation
séparée ou shunt : La tension appliquée à
l'inducteur, donc le courant d'excitation, est indépendante du courant
d'induit, c'est-à-dire de la charge. Pour un moteur à excitation
séparée, l'inducteur possède son alimentation propre, ce
qui est la configuration la plus courante pour un moteur à courant
continu. Pour un moteur shunt, l'inducteur est branché en
parallèle avec l'induit. [24]
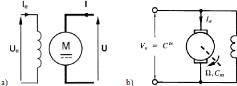
Figure 2.21 a)Symbole d'un moteur à excitation
indépendant ; b) à excitation shunt
Moteur à courant continu à excitation
sérié : Moteur à courant continu est dit à
excitation série lorsque l'inducteur est branché en série
avec l'induit.
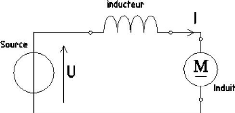
Figure 2.22 Symbole d'un moteur à excitation
série
Moteur-compound : Une bobine inductrice est raccordée
directement à la source de courant, tandis que la seconde bobine
inductrice est raccordée en série au rotor. La tension aux bornes
ne doit pas dépasser 10 V.
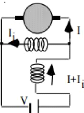
Figure 2.23 Symbole d'un moteur à excitation
compound.
35
Moteur synchrone sans balais et servomoteur
Moteur synchrone sans balais : Le moteur synchrone sans balais
a une structure inversée par rapport au moteur à courant continu.
Les aimants sont au rotor et les bobinages sont au stator. La
particularité de ce type de moteur est qu'il est conçu
grâce aux capacités de l'électronique moderne. Les phases
de ce type des moteurs sont alimentées successivement par un commutateur
de phases électronique. Par contre, ce n'est plus une horloge
extérieure qui fixe l'instant de commutation, mais la position du rotor
par l'intermédiaire de capteurs. Le couple moteur dépendant pour
chaque phase de la position du rotor par rapport au stator, les capteurs sont
donc placés de manière à obtenir en permanence un couple
maximum.
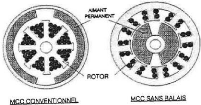
Figure 2.24 Structure de moteur à balais et moteur sans
balais
Le servomoteur : un servomoteur est, comme son nom l'indique,
un moteur mais avec quelques spécificités en plus. Contrairement
à un moteur classique qui est utilisé pour tourner avec une
vitesse proportionnelle à un courant ou à une tension, pour
obtenir une position. Il effectue une rotation suivant un angle
déterminé. Le plus souvent l'angle est compris entre 0 et
180° puis il garde cette position.

Figure 2.25 Un servomoteur
| 

