3. Les actionneurs 3.1. L'actionneur
Un actionneur est un dispositif qui transforme
l'énergie délivrée par l'interface de puissance, en
énergie utilisable par les effecteurs de processus. Le schéma
fonctionnel d'un actionneur ainsi que les schémas des principaux
actionneurs sont représentés à la figure ci-dessous. Les
moteurs électriques, les vérins pneumatiques ainsi que les
éléments chauffants sont des exemples typiques d'actionneurs
utilisés en automatisation industrielle.
Les effecteurs : un effecteur est un
dispositif qui transforme l'énergie délivrée par un
actionneur, en valeur ajoutée. Selon le cas, un effecteur peut
être séparé ou non de l'actionneur. Quelques exemples
d'effecteurs rencontrés en milieu industriel sont : les ventilateurs,
les broyeurs, les pinces à outils de robots articulés,
dispositifs de transfert de chaleur... [26]
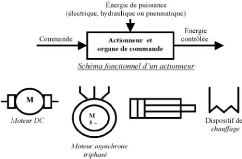
Figure 2.12 Schéma fonctionnel et symboles des
actionneurs
3.2. Mode de fonctionnement des actionneurs et des
moteurs
Mode tout ou rien : l'actionneur ou le moteur
est connecté à une alimentation hydraulique ou pneumatique de
pression constante ou à une alimentation électrique de tension et
fréquence constantes. Sa vitesse de déplacement ou de rotation
dépend de son principe de fonctionnement et des caractéristiques
de son alimentation, mais aussi de la charge (frottement, couple d'usinage,
etc.). Non alimenté, il ne produit plus aucune force ou couple et se
laisse entraine par la charge, généralement, il s'arrête
âpres un temps plus ou moins long sous l'effet des frottements, ou
soudainement sous l'action d'un frein mécanique. La commande est alors
particulièrement simple à réaliser, à l'aide d'un
distributeur pour les entrainements pneumatiques ou hydraulique et d'un
interrupteur pour les entrainements électriques.
Mode contrôlé en vitesse : en
ajustant la pression hydraulique ou pneumatique, la tension électrique
ou la fréquence, il est possible de modifier la vitesse d'un actionneur
ou d'un moteur de manière continue, au moins dans une certaine plage
(par exemple de 20% à 100% de la vitesse nominale). Toutefois la vitesse
reste plus ou moins dépendante de la charge.
Mode réglé en vitesse : le
principe de la régulation est illustré dans la figure ci-dessous
:
l'opérateur ou le programme d'automate choisit une
valeur de consigne en fonction de la
vitesse qu'il souhaite obtenir. La valeur réelle est
mesurée et fournit le signal de contre-
réaction , qui est comparé à la valeur de
consigne. La différence entre ces deux valeur est
appelée écart de régulation s'efforce de
le minimiser en ajustant la grandeur de réglage et, par
l'intermédiaire de l'amplificateur de puissance,
l'alimentation du moteur.
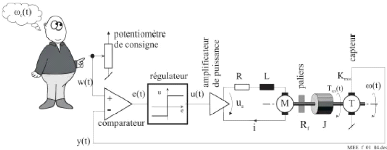
Figure 2.13 Principe de la commande de vitesse en boucle
fermée
29
30
Mode servomoteur-réglé en position :
en ajustant un capteur de position sur l'arbre du moteur ou sur la
charge en mouvement, il est possible de réaliser des déplacements
point à point et d'arrêter le moteur à des positions
très précises.
Mode pas à pas : il est combine le
mode tout ou rien et le mode servomoteur. L'actionneur travaille bien en mode
tout ou rien, mais il est alimenté par une succession d'impulsions. A
chaque impulsion, il avance d'une petite distance appelée pas ou
incrément. La distance parcourue dépend directement du nombre
d'impulsions reçues. La vitesse dépend de la fréquence des
impulsions. De plus, lorsqu'il ne reçoit plus d'impulsions, un tel
actionneur est tenu en place avec une certaine force de maintien.
| 

