Chapitre III : Formulation du problème
d'amortissement et méthode de
dimensionnement des amortisseurs
Formulation du problème d'amortissement et
méthode de
dimensionnement des amortisseurs
III. 1. Introduction
L'équation du mouvement dynamique est fondée sur
trois composantes principales qui caractérisent une construction et sa
structure : la masse mise en mouvement, la rigidité des
éléments structuraux et les différents systèmes
d'amortissement.
Ces composantes sont reliées respectivement aux grandeurs
du mouvement : le déplacement, la vitesse et
l'accélération.
Notre travail porte sur l'impact de l'addition de nouvel appareil
d'amortissement sur le mouvement.
Nous allons ainsi procéder dans ce chapitre à la
formulation de l'équation de mouvement avec intégration des
amortisseurs, ensuite au dimensionnement des amortisseurs ;
III.2. Caractéristiques des amortisseurs
visqueux
Ces dispositifs sont assimilables à un vérin
hydraulique à doubles effets et à forte capacité de
dissipation d'énergie. Ils comportent couramment deux chambres remplies
d'un fluide (huile hydraulique ou pâte silicone). Celles-ci sont
reliées l'une à l'autre par des soupapes calibrées de
façon à permettre des déplacements lents et une
dissipation d'énergie générée par frottement
visqueux du fluide sous l'effet du mouvement sismique (rapide).
La relation entre la force d'amortissement et la vitesse relative
V peut s'écrire comme suit [6]:
F = C Vá (III-3)
V : la vitesse du piston (soupape),
C et á : sont des paramètres qui dépendent
de la loi de comportement du fluide.
Tableau III.1 : différents types
d'amortisseurs selon les différentes valeurs de l'exposant á
[6].
|
Type
d'amortisseur
|
Valeur
de á
|
Force
d'amortissement
|
Remarques
|
|
Amortisseur linéaire
|
á =1
|
F = C V
|
Amortisseur hydraulique classique
|
|
Amortisseur non linéaire
|
á =0
|
F = C
|
Amortisseur idéal à frottement sec
|
|
Amortisseur non linéaire
|
á ? 0, 1
|
F = C Vá
|
Amortisseur visqueux intermédiaire
|
En général la valeur de l'exposant á varie
entre 0.1 et 1.8 [6].
Les figures suivantes, montrent la loi de comportement des
différents types d'amortisseurs soumis à une excitation
sinusoïdale.

Figure III.1 : lois de comportements de
différents types d'amortisseurs
Remarque
L'amortisseur liquide assure seulement l'amortissement dans sa
direction axiale.
III.3. Formulation de l'équation du mouvement
avec des amortisseurs
Le problème posé par les déplacements
excessifs peut être résolu par l'augmentation de
l'amortissement
En général l'équation d'équilibre
dynamique de n'importe quel modèle est sous la forme suivante:
Fm + Fc + Fk= P(t) (III-1)
Fm : Force d'inertie.
Fc : Force d'amortissement due à la
structure.
Fm : Force de rigidité.
P(t) : Charge dynamique (variable en fonction du temps).
On peut donc écrire l'équation comme suit :
& & &
M U + CU +
KU = P( t ) (III-2)
M : matrice de la masse de la structure,
C : matrice d'amortissement,
K : matrice de rigidité,
U&& ,U& etU
sont respectivement l'accélération, la vitesse et les
déplacements du système.
La force d'amortissement due à un amortisseur est
donnée par l'expression suivante [11] :
F = C Vá
Pour un système où l'on utilise des amortisseurs
l'équation de mouvement devient :
Fm + Fc +Fc' +Fk= P(t)
(III-4)
F'c : force d'amortissement due à l'amortisseur ajouté
au système, d'où l'équation de mouvement devient [11] :
.. .
M U +
Cs
U+CaVá + K U
= P t (III-5)
( )
Lors de mouvement de système, la vitesse du piston V est
égale à la vitesse de mouvement du
.
système, donc U = V
D'où l'équation devient [11] :
M U & & + C
s U & + CaU &
á + KU = P(t)
(III-6)
Et pour une excitation sismique l'équation s'écrit
[11]:
M U s U C a U
+ C + á + K
= -
U MUg (III-7)
& & &
U& & g : Accélération
sismique du sol
On remarque bien que si á est égal à
l'unité l'équation devient linéaire comme suit [11]:
& & & & &
M U + ( C
s +Ca)U
+KU=MUg (III-8)
La résolution de cette équation devient classique
comme elle a été introduite dans le chapitre IV par la
méthode de Newmark ou par d'autres méthodes [11].
Si a ? 1 l'équation du mouvement
précédente reste non linéaire et parmi les nombreuses
méthodes d'intégration directe pour résoudre cette
équation, la méthode d'intégration de Newmark semble
être la plus efficace avec de très petites erreurs
numériques. Dans la méthode de Newmark, on supose que
l'accélération est linéaire pendant le temps à
t + Ä t . Pour l'intervalle de temps Ät,
les relations sont [11]:
. . .. ..
|
Ut +Ä t = Ut + -
â + â +Ä Ä
[(1 ) U t U t t t
]
|
(III-9)
|
. .. ..
U t +Ä t = Ut
+Ut Ät + [( 2 -á
)U t+áUt+Ät]Ät
2 (III-10)
á et â sont les paramètres
employés pour obtenir l'exactitude et la stabilité
d'intégration. Dans le cas oil 4
á = et 2
1 â = , la méthode
d'accélération moyenne constante rapportera la
1
stabilité sans conditions dans le procédé
d'itération.
. ..
Les équations précédentes, Ut
+Ät et Ut +Ät
peuvent être résolues en termes de Ut + Ä t
comme
U t + Ä t t + Ä t (1 -
â )U t+âÄtUt
+Ät
&&
( U t+Ä t - Ut
-Ut- - 1U t
1 1
1
&&

áÄ
t áÄt
2
á
(III-11)
(III-12)
Pour obtenir le déplacement, la vitesse et
l'accélération au temps t + Ä t ,
l'équation d'équilibre est écrite comme [11]:
|
M U & & C
s U & C K (
g ) t t
t t t t a t t
U +
& á
+ + U = - M & U &
+ Ä + Ä + Ä t t
+ Ä +Ä
|
.
|
(III-13)
|
C & : Terme de la non
linéairité.
á
aUt +Ä t
Pour éviter d'employer la technique d'itération
pour détérminer le vecteur de déplacement à
á
chaque étape, le terme non linéaire Ut
+Ä t est développé par une série de
Taylor comme montré dans l'équation suivante: [11]
& á t +Ä t = U
tá+r · diag
( 1 )(
á
U & - U & - U & )
t t t
+ Ä t
U
(III-14)
On suppose que les limites d'ordre supérieur peuvent
être négligées sans perte d'exactitude
diag : Opérateur de diagonalisation d'un vecteur
à une matrice. Les étapes de résolution sont comme suit
[11] :
~ ~
|
~
|
..
|
|
P M U g t t Ma M C
s a C C a C
+ +
t t
+ Ä = - ( ) + Ä + a a
s
|
(III-17)
|
K Ut +Ä t =
Pt+Ät
.
~ 1 â r â
K K
= + + + C a diag U t
á
M C m (
t 2
á Ä á Ä t á
Ä t

(III-15)
(III-16)
)
-1

1 t 2 U t +áÄt
Ut+( 2á 1) Ut
1 . 1
â
Ut + ( á
2á-1)U t + Ä t( -1)
Ut
& .. .
..
â U
t - U t á + râ diag(
Ut á-
)Wt + â Ä t(
1 - 1) U t - rÄ t(1 - â )
diag( Uá t )U t
2á
·
·
a Cd
á Ä
â â
..
áÄt
. .
áÄ t
·
=
aM
=
aCs
(III-18)
(III-19)
(III-20)
La vitesse U
t+ Ät et
l'accélération U t+ Ät peuvent
être obtenues à partir des équations III-11 et
4-12 [11].
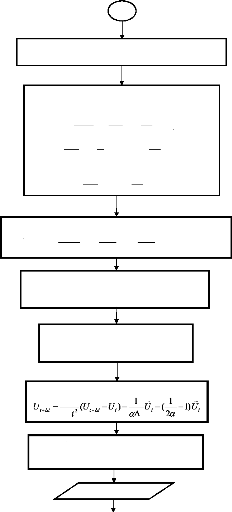
Nous présentons sous forme d'organigramme le cheminement
des étapes de déterminations des grandeurs déplacements,
vitesses et accélérations.
1
n
ö
ö j n
ö n n
Détermination de la matrice modale Ö
1 j n
ö ö ö
1 1 1
? ? ? ? ? ? ? ??
j n
ö ö
j j
Ö
1
ö
j
Détermination de la matrice d'amortissement diagonale
|
C m
|
=
|
ci
|
c
j
|
?
?
?
?
?
?
cn ?
|
1

ORGANEGRAMME DE DETERMINATION DES
DEPLACEMENTS,
VITESSES ET ACCELERATIONS
Début
Lecture des données
Matrices de masse et de rigidité
Détermination des pulsations propre du
système
det(K-ù2M)=0

|
Détermination des modes propres du système (K-
ù j2M)Öj=0
|


Chapitre III Formulation du problème d'amortissement et
méthode de dimensionnement des amortisseurs
Détermination de la matrice d'amortissement
modale
Cs=(MÖ[ÖTMÖ]-1)Cm
([ÖTMÖ]-1 ÖTM)
Calcul de la rigidité effective Keff
1 â r â .
Keff = K+ ( )
r -
+ 1
M C + C d diag U
P t + Ä t = -
M(Ug) t +Ä t
MaM + C sa C
+C aa C
s
&& 1
1- t + Ä t = 2 (
U t+Ä t U t) - 1 U t
2á 1) U t
~
Détermination du déplacement Ut+Ät
acs=
U t + Ä t = U t
+Ä t (1 -â )U t
+âÄ tUt+Ät
Calcul de la charge effective Peff
aM=
Détermination de l'accélération
áÄ
. .
â
Ut + ( -1) Ut + Ä
t( -1) U t
áÄ t á 2á
Détermination des coefficients
. t 2 m
á Ä á . Ä t
á . Ä t t
Détermination de la vitesse
acd=
â â
áÄ t
1
áÄ
..
r
âut - u
t+
.
1 1
U t + U t + ( - 1)
2 áÄt 2á
K Ut + Ät =
Pt+Ät
~ ~
t
Résultats
1
.
râ
..
..
á
táÄt&
diag(u
.
Ut
..
..
a
| 

