Chapitre 3
Modélisation unidimensionnelle et simulation
d'un transducteur ultrasonore
piézoélectrique
|
Sommaire
|
|
|
|
|
3.1
3.2
|
Introduction ............................................
.......... ............. .
Modélisation unidimensionnelle d'un transducteur
ultrasonore piézoélect-
rique....... ............... ................................
.... .............
|
41
41
|
|
3.2.1
|
Transducteur sans pertes ...............................
................
|
41
|
|
3.2.2
|
Transducteur avec pertes ...............................
................
|
52
|
|
3.3
|
Simulation d'un transducteur ultrasonore
piézoélectrique ................
59
|
|
|
3.3.1
|
Caractérisation de la ligne de transmission et analogie
électroaco-
|
|
|
|
stique......................
............................................
|
59
|
|
3.3.2
|
Sous-circuit PSPICE du modèle de Leach
.......................... .
|
62
|
|
3.3.3
|
Simulation de l'impédance électrique du
transducteur ....... ...
|
63
|
|
3.4
|
Conclusion
........................................................ ............. .
|
67
|
3.1 Introduction
La modélisation du transducteur ultrasonore
piézoélectrique est une étape nécessaire pour la
compréhension de son comportement, pour l'estimation de ses
caractéristiques et pour son optimisation [6].
Le succès de l'électronique moderne est
construit sur la possibilité de prédire avec précision le
comportement d'un système par le recours à des outils de
simulation. Ce paradigme peut être prolongé aux composants tels
que les transducteurs ultrasonores piézoélectriques associent
à leur électronique. La capacité de simuler le
transducteur ultrasonore piézoélectrique et leur
électronique rend possible l'ensemble des optimisations efficaces au
niveau de système réduisant la taille, le coût et la
consommation d'énergie [79].
Le présent chapitre est dédié à la
modélisation unidimensionnelle et à la simulation avec PSPICE
d'un transducteur ultrasonore piézoélectrique.
3.2 Modélisation unidimensionnelle d'un
transducteur
ultrasonore piézoélectrique
3.2.1 Transducteur sans pertes
3.2.1.1 Transducteur comme un système
linéaire à trois ports
Si le transducteur considéré comme une plaque
piézoélectrique assez large pour ne pas avoir de vibrations
parasites suivant les dimensions latérales, on utilise alors une
modélisation à une dimension, en ne considérant que l'axe
de propagation de l'onde ultrasonore : z. Ce type de modélisation
considère une plaque d'épaisseur « a3 »
composée d'une céramique piézoélectrique, avec
une électrode de chaque coté, à z = - a3/2 et
à z = a3/2, comme illustré sur la figure 3.1.a. Le
système mécanique considéré peut être
facilement mis en analogie avec un système électrique, ou
schéma équivalent. C'est pourquoi on peut considérer notre
transducteur comme un système linéaire à trois ports (ou
accès) (cf. figure 3.1.b) [19,80]:
· Un port électrique alimenté par une
intensité I3, sous une tensionV3.
· Deux ports acoustiques alimentés par les vitesses
v1 et v2 analogues à des intensités sous
l'action des forces F1 et F2 analogues à des
tensions.
Chapitre 3. Modélisation unidimensionnelle et
Simulation d'un transducteur ultrasonore piézoélectrique
42
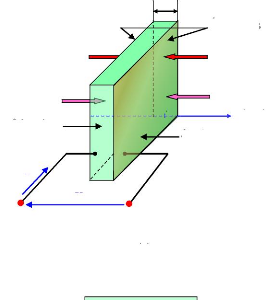
v2=- v (a3/2)
v1= v (-a3/2)
a3
Electrodes
F1= -AT (-a3/2) F2= -AT (a3/2)
Céramique
piézoélectrique
z (ou 3)
0
I3
V3
(a)
v1 v2
Section A


Port
acoustique
F1
Port
acoustique
F2
Transducteur

Port
électrique
I3
V3
(b)
Fig. 3.1 - (a) Diagramme d'une céramique
piézoélectrique vibrant en épaisseur, (b)
Le
transducteur comme un système linéaire à trois ports
[19,81]
Une excitation du port électrique, à l'aide
d'un générateur de tension, provoque une sollicitation
mécanique sous la forme d'une onde ultrasonore. Les deux ports
acoustiques représentent en fait les faces arrière et avant du
transducteur. L'effet inverse se traduit par une sollicitation mécanique
mettant le transducteur en résonance et excite le port
électrique.
| 

