|


RAPPORT DE STAGE
TECHNICIEN
P+R : YOUssEF MELLOUKI
"ENC+DRE" P+R : M. TILL+RD LOIC
+NNEE UNIVER'IT+IRE : 2005-2006
'UTET : Programmation d' un logiciel de
résol ution des problèmes d'équilibrage des bateaux en 3D
par Visual Basic.
A tous les ouvriers des entrepri ses
étrangères.

Monsieur Daniel Rodriguez, PDG du Chantier Naval Hésaro,
m'ayant fait confiance en m'accueillant dans sa société.
Monsieur Tillard Loïc, responsable Qualité ISO,
m'ayant accueilli dans son équipe au sein du bureau d'études.
Monsieur Giovanni Mazzeli, responsable de la motorisation et
Monsieur Patrick De Paris, responsable du service d'achats dont les
explications et les remarques ont largement élargi mes connaissances
dans le domaine de la marine et de la construction navale.
Madame Karin Drieghe, responsable du service commercial,
m'ayant fourni toute la documentation nécessaire à la
présentation de la société.
Monsieur Houcine Haya, ouvrier à l'entreprise pour son
esprit d'accueil dont il a fait preuve et en essayant de partager avec moi une
expérience d'or acquise durant des années, m'a fait part d'une
attention dont je le remercie vivement.

Introduction . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 1
I - Chantier Naval Hésaro . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 2
1 - Vocation et stratégie . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 2
2 - Organigramme de la société . . . . . . . . .
. . . . . . . . . . . 3
3 - Moyens de production . . . . . . . . . . . . . . . . . . . .
. . . . . 3
a) Terrains et locaux . . . . . . . . . . . . . . . . . . . . .
. . . . 3
b) Outillage . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 4
II - Equilibrium . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 4
1 - Module de création de formes . . . . . . . . . . . .
. . . . . . . . 4
a) Changement de repère et d'échelle . . . . . . .
. . . 5
b) Créati on des segments de droites . . . . . . . . . .
7
c) Création des courbes de Bézi er . . . . . . . .
. . 7

Définition des courbes de Bézier . . . . .
7
Créer une courbe de Bézier à l'aide du
module De création . . . . . . . . . . . . . . . 8
d) Gestion des objets . . . . . . . . . . . . . . . . . . . . .
. . . . 10
e) Sélection des objets . . . . . . . . . . . . . . . . .
. . . . . . . . 12
f) Enregistrement et chargement des objets . . . . . . . . . .
15
2 - Module de calcul . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 16
a) Affichage en 3D . . . . . . . . . . . . . . . . . . . . . . .
. . 17

Modél isation mathématique . . . . . . . . . .
18
b) Génération des surfaces . . . . . . . . . . . .
. . . . . . . . 20
c) Calculs . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 22

Calcul d'aire . . . . . . . . . . . . . . . . . . . . 23
Conclusion. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 29


l y a 15 milliards d'années, la matière de
l'univers était extrêmement dense et très chaude. Une
gigantesque explosion, le Big Bang, a provoqué sa dissociation en des
corps célestes. Le système solaire dont la planète terre
fait partie ainsi formés à partir de ces corps célestes,
l'apparition de l'homme date d'à peu près un million
d'années.
L'homme préhistorique vivait dans des cavernes le
protégeant de la pl uie et du froid. Il connus l'agriculture
après avoir tenté la chasse et l'élevage, utilisant comme
moyens de transport des animaux domestiqués tels que ânes et
mules. Ses clans devinrent alors de plus en plus larges et la
nécessité de moyens de transport plus efficaces s 'impose. La
technologie avance, les chariots et les petites voitures tirées par des
chevaux apparurent, jusqu'au jour où il décida de
conquérir le bleu.
Le premier bateau que l'homme ait construit n'était
rien d'autre qu'un tronc d'arbre coupé en deux, et vidé de
l'intérieur. Le petit bateau s'est développé petit
à petit jusqu'à atteindre plusieurs mètres de long avec
des systèmes GPS et une longue li ste de gadgets de technologie de poi
nte.
Chantier Naval Hésaro, l'entreprise où j 'ai
passé mon stage technicien, est spécialisée dans la
construction de bateaux et plus précisément les bateaux de
plaisance de luxe et les navires de pêche. Les plans et les
schémas de ces bateaux sont établis par des architectes navals
espagnols et allemands. Ma mission moi, durant ce stage, était de
résoudre un problème auquel sont confrontés souvent les
constructeurs navals : les plans étant théoriques et
établis sur microordinateur, ils ne présentent aucun
défaut, autrement dits théoriquement, le bateau flotte
parfaitement sur l'eau tout en gardant son toit horizontal. Mais la
construction de ce dernier est loin d'être parfaite (le parfait n'existe
que dans notre imagination), il en résulte ainsi des défauts
d'inclinaison du bateau pouvant atteindre jusqu'à 28° qui peuvent
facilement s'amplifier lors d'une tempête par exemple, et qui se
corrigent par l'ajout de masses de l'autre côté du bateau.
Le sujet de mon stage est alors, la conception d'un logiciel
qu'on a appelé Equilibrium, qui permet de créer tout d'abord la
coque du bateau et en fonction de son angle d'inclinaison mesuré lors
d'une première mise à l'eau dans un bassi n, il donne,
après un simple clic, la masse qu'il faut ajouter de l'autre
côté et sa distance par rapport à l'axe du bateau.
Ainsi, mon rapport de stage s'étalera sur deux parties
: une première présentant l'entreprise et une deuxième
expliquant le fonctionnement du logiciel et les pri nci pales étapes de
sa programmation.

I - Chantier Naval Hésaro :

1 - Vocation et stratégie :
Créé en 1998, Chantier Naval Hésaro est
une société anonyme française au capital de 3 000 000 Dh
située au nouveau port d'Agadir, et est constituée de
l'association de spécialistes en construction navale, Aluminium, Acier
et Composite, et d'un savoir-faire local en ébénisterie. Elle
aborde la fabrication de bateaux de plaisance de luxe, de service et des navi
res de prche pouvant atteindre jusqu'à 50 m de long (chalutiers,
sardiniers...).

Fig. 1 : Piripipao, bateau construit par
CNH.
(Photo prise sur le port de M arsei lle)
La société intervient sur plusieurs marchés
étrangers, notamment dans les
domaines de :



Pêche professionnelle : Afrique et Amérique du
sud
Plaisance : M arché européen dans les domai nes
de construction de voiliers et M otors Yachts.
Navire garde côtes : Afrique, Amérique du sud, moyen
orient.


2 - Organigramme de la société
:
|
Direction
PDG : Daniel
Administrateur : Abdeslam
|
Qualité - ISO Loïc TILLARD




Informatique Hafid
|
Administration et Finance Abdeslam
|
|
Commercial
Daniel
|
|
Coordination
Alfred
|
|
|
|
|
|
|
|
|
|
|
Personnel
Farouk





Service Commercial
Karin
Production
Alfred

Service Compta
Sylvie
Service Achats Patrick
Chaudronnerie Houcine
Electricité
Driss
Peinture
Ali
Menuiserie Yazid
Tuyauterie
Brahim
Motorisation
Giovanni
3 - Moyens de production : a) Terrains et locaux :
Chantier Naval Hésaro est situé sur la zone
portuaire d'Agadir avec un accès direct à la mer par
élévateur de bateaux de 1000 tonnes. L'aménagement des
locaux est organisé de la façon suivante :

2112 m² d'usine.
360 m² d'atelier de préparation. 336
m² d'atelier de menuiserie. 276 m² de magasi n
et stockage. 510 m² de bureaux.


b) Outillage :
La société possède un atelier de
chaudronneri e doté de :

U ne presse pl ieuse hydraul ique numérique.
Un banc d'oxycoupage plasma numérique.
U ne presse à arcade.
U ne poi nçonneuse.
Tout l'appareillage de soudure.
Divers matériel de chaudronnerie.
Une cintreuse, une tronçonneuse, un compresseur à
air, outillage à
main...
Elle possède aussi un atelier mécanique avec une
perceuse radiale ainsi
qu'un atelier de menuiserie doté lui de :
Une scie à ruban. U ne sci e ci rcul ai re.
U ne raboteuse dégauchisseuse.
U ne mortaiseuse. U ne toupie.
U ne ponceuse.
Un bureau d'études et de coordination informatisées
figure aussi parmi les locaux de l'entreprise, plus une administration bien
évidemment.

II - Equilibrium :
Equilibrium, le logiciel qui va résoudre le
problème d'inclinaison de bateaux nécessite un langage de
programmation orienté objet dans un environnement Windows pour pouvoir
mieux gérer ses composants, et vu que son interface doit être
simple à utiliser, comme tout autre programme d'ailleurs, Microsoft
Visual Basic est le langage adéquat pour cette réalisation.
Le programme conçu est composé de deux modules
principaux : un module de création de formes pour dessiner les coques
des bateaux et un module de calcul exploitant les dessins établis.
1 - Module de création de formes
:
La coque d'un bateau a été toujours vu comme une
baleine (l'homme n'a rien inventé). Elle est composée de couples
jouant le rôle de squelette et de tôles couvrant ces couples comme
une peau. Le premier module d'Equilibrium sert alors à dessiner ces
couples qui ne peuvent, dans tous les cas, être composés que de
deux éléments simples : des segments de droites et des courbes de
Bézier.
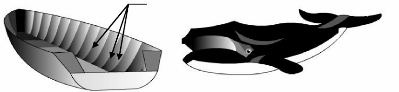
Couples de bateau (l'équivalent de squelette chez une
baleine).
fig. 2 : Analogie entre la coque d'un bateau
et une baleine.


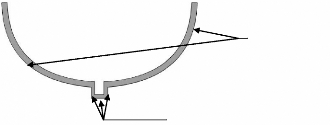
Courbes des Bézier
Segments de droites
fig. 3 : Décomposition d'un couple de
bateau en des segments de droites et des courbes
de Bézier.
Pour faciliter l'utilisation du programme et surtout pour
réduire au maximum le temps de dessin, on ne crée que la
moitié des couples puisque aucun bateau dissymétrique n'a encore
vu le jour et l'autre partie est générée par
symétrie.
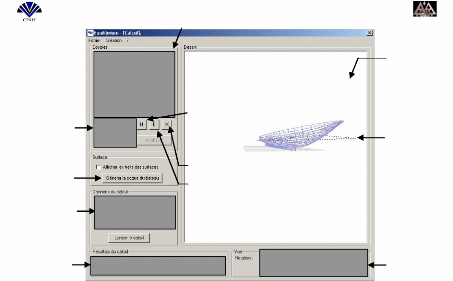
Commandes de traçage des segments de droites et des coubes
de Bézier.
fig. 4 : Interface du module de création
de formes Repère de dessin.
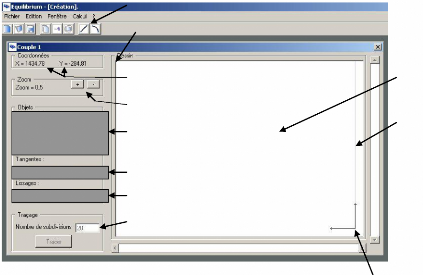
Coordonnées de la souris par rapport au repère de
dessin exprimées en millimètre
Boutons de réglage du facteur de zoom.
Nombre des subdivisions des courbes de Bézier.
Coordonnées des extrémités des objets.
Angles des tangentes des courbes de Béziers.
Modules des vecteurs tangents des coibes de Bézier.
Origine de la fenêtre de dessin donnée par Visual
Basic
Fenêtre
de
dessin.
Axe de symétrie
du
dessin.
a) Changement de repère et
d'échelle :
Lors de l'exécution du programme, la fenrtre de dessin
a des dimensions fixes, exprimées en pixel et ayant comme origine le
point haut à gauche (voir figure cidessus) alors que l'idéal pour
l'utilisateur, est d'avoir un repère et des dimensions en une
unité plus pratique (le millimètre). D'autant plus que cette mrme
fenrtre doit afficher les dessins avec des échelles d'affichages
variables lors du changement de facteur de zoom. Donc surmonter cette
difficulté, implique écrire une fonction qui change les
coordonnées exprimées en pixels dans le repère lié
à la fenêtre de dessin, en


des coordonnées exprimées en millimètre dans
le repère utilisateur et adaptables au facteur de zoom.
L'origine du nouveau repère est prise à une
distance de 20 pixels des deux bords bas et droits de la fenêtre de
dessin (ici la distance 20 pixels est prise uniquement pour des raisons
d'esthétique mais on peut prendre n'importe quelle valeur du moment
où on la juge utile).
20 pixel
20 pixels
Fig. 5 : Position de l'origine du
repère utilisateur
par rapport à la fenêtre de dessin
Soit L et H respectivement la l argeur et la hauteur de la
fenêtre de dessi n

exprimées en pixel et Z le facteur de zoom écrit
sous la forme


où .

On veut ici, et pour les mrmes raisons d'esthétique que
la largeur de la fenrtre de dessin moins 20 pixels des deux côtés
droit et gauche, soit équivalente à 5000 mm divisée par le
facteur de zoom, et la hauteur de la fenêtre moi ns 20 pixels des deux
côtés bas et haut
soit équivalente à mm, c'est-à-dire que
quand le facteur de zoom est égale à 1 la
fenêtre affichera des distances de l'ordre de 5000 mm, et
quand , lorsqu'on
Z
agrandit l'échelle d'affichage (respectivement quand
lorsqu'on réduit l'échelle

d'affichage) la fenrtre affichera des distances de l'ordre de
2500 mm (respectivement 10 000 mm)


2
Remarque : Ici la distance à afficher dans le
cas d'un facteur de zoom égale à 1, a été prise
5000 mm car en général les couples des bateaux ont des dimensions
de l'ordre de 10 000 mm de largeur et donc 5000 mm pour la moitié qui va
être affichée mais on peut, bien évidemment, là
aussi, prendre n'importe quelle valeur puisque on peut changer l'échelle
d'affichage.
Finalement, la fonction qui réalise ce changement de
repère et d'échelle suivant l'axe X est :
mm

où X en pixels et en
0 1 f (X


On remarque bien donc, que
000
0
De mrme la fonction qui réalise le changement de
repère et d'échelle suivant l'axe Y est :

où X en pixels et en
0 1 (X
mm
et là aussi 000
f 0
Ainsi, nous avons un moyen facile de passage entre les
coordonnées données par le langage de programmation et les
coordonnées relatives aux dessins qu'on veut établir et pour le
passage inverse (du mm au pixel), il suffit d'utiliser l'inverse de ces
fonctions puisqu'elles sont linéaires et donc bijectives.
b) Création des segments de droites
:
Lors de la création d'un segment de droite, les
coordonnées des extrémités sont
récupérées en pixels grâce aux fonctions
données par Visual Basic (Fenêtre_MouseDown(Button As Integer,
Shift As Integer, X As Single, Y As Single)), le segment de droite est
dessiné et les coordonnées de ses extrémités sont
converties en mm pour être stockées en mémoire comme un
nouvel élément grâce aux fonctions définies dans le
paragraphe précédent.


Création des courbes de Bézier :
Définition des courbes de Bézier :
Fig. 6 : Modèle de courbe de
Bézier.
Une courbe de Bézier est une courbe lisse obtenue
à partir de n points appelés points de contrôle et
permettant de changer facilement sa forme. Elle est défi nie par une
expression paramétrique vectorielle, où chaque vecteur est
modulé par une

fonction du paramètre, avec telle que :
f )


A l'origine les conditions suivantes sont imposées :
u
- la position correspondante à ce point est donnée
par donc

f ( 0
- la direction de la tangente en ce point est donnée par
donc

f ( 0
- 

En général la dérivée ne
dépend que des K vecteurs
ce qui impose
f k
(
(
A l'extrémité les conditions suivantes sont
imposées :
u
-


la position correspondante à ce point est
donnée par la somme des vecteurs donc

- la direction de la tangente en ce point est donnée par
donc

f ()


L'utilisation de ces conditions permet la détermination de
familles de fonctions qu'on peut calculer directement à partir de
l'expression :
i
|
où
|
|
|
|
|
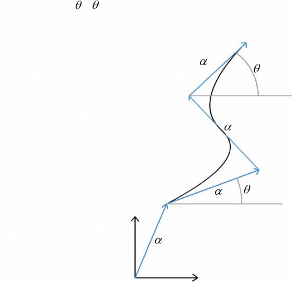
Créer une courbe de Bézier à
l'aide du module de création :
|

V ue la si mpl icité des formes des couples d'un
bateau, les courbes de Bézier pouvant représenter un couple d'un
bateau peuvent rtres créés à partir de 4 points
seulement.

Fig. 7 : Obtention d'un couple à partir
d'une
courbe de Bézier à 4 points.
Les deux premiers points sont les extrémités de
la courbe et , comme les segments de droites, elles sont
récupérées en pixel eux aussi. Quant au deux autres points
restants ils sont déterminés par deux autres données
précisées par l'utilisateur du programme, et qui sont les angles
des tangentes et les lissages (notion exprimant la dérivée
deuxième de la courbe).



,
? ( L C s L
,? ( x L Cos
Exemple :
|
On veut tracer une courbe d'extrémités
|
et d'angles
)
|
des tangentes : et de lissages.
L
y
x
Fig. 8 : Obtention d'une courbe de
Bézier à parti r de
deux points et quatre vecteurs.
La courbe de Bézier obtenue sera créée
à partir des vecteurs et des points
suivants :
Théoriquement, dessiner une courbe de Bézier
revient à parcourir l'intervalle [0,1] par une certaine variable u
comme vu dans la définition des courbes de Bézier. En
programmation parcourir un intervalle de R continuellement n'est pas
possible pour la simple raison qu'il existe une infinité de points, donc
subdiviser l'intervalle demeure la solution unique.


Ainsi, calculer P(u) où est ramené en un
calcul de où
et N le nombre de subdivisions définis
par l'utilisateur.


Finalement, la courbe de Bézier est
décomposée en N segments de droites facilement
programmables et les coordonnées de ses extrémités, les
angles des tangentes et les lissages sont stockés en mémoire pour
permettre leur traitement par la suite.
d) Gestion des objets :
Les objets que l'utilisateur du programme pourra créer,
ne sont finalement que des traits dessinés sur l'écran loin
d'être reconnaissables par l'ordinateur. Donc pour pouvoir gérer
(supprimer, copier, coller, enregistrer, modifier...) ces objets, il est
nécessaire de trouver une méthode permettant le passage entre les
données des formes dessinées et l'image les
représentant.
La méthode adoptée est alors une utilisation de
tableaux : les données de tous les objets crées sont
stockées en millimètre dans un tableau à
deux dimensions qu'on va appeler T(ij). La première dimension sert
à désigner les objets, ainsi, lorsqu'on écrit T(2,10) on
sait directement qu'on a affaire au deuxième objet. Quant à la
deuxième dimension, elle désigne les informations relatives aux
objets (voir tableau cidessous). Contrairement à la première
dimension pouvant être


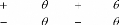
Où A (600,100), B (200,500), C (400,500), D (1000,1200) et
E (2000,3000) (Voir Dessin).
C
D
E
A
B
Le tableau qui contiendra le dessin sera alors :
|
1
|
600
|
100
|
200
|
500
|
0
|
-
|
-
|
-
|
-
|
-
|
|
2
|
200
|
500
|
400
|
500
|
0
|
-
|
-
|
-
|
-
|
-
|
|
3
|
400
|
500
|
1000
|
1200
|
0
|
-
|
-
|
-
|
-
|
-
|
|
4
|
1000
|
1200
|
2000
|
3000
|
1
|
180
|
135
|
800
|
600
|
20
|
Maintenant, après avoir établi la méthode
de stockage des objets, on sera souvent amené à actual iser le
dessi n des objets crées : lors par exemple d'un agrandissement, ou
encore lors d'une suppression d'un objet. Donc écrire une
procédure qui réalise ceci, sera plus intelligent
qu'écrire un bloc de 20 lignes pour chaque événement
produit par l'utilisateur et qui nécessite l'actualisation du dessin.
La procédure qu'on va appeler Dessiner va naturellement
parcourir le tableau T dans lequel sont stockés les objets. Et pour
chaque i, elle testera d'abord si l'objet correspondant est une courbe de
Bézier ou un simple segment de droite. (Autrement dits si ) si la
procédure devra tracer un segment
( )
entre les point et sans oublier bien sur la conversion du
( ( ) ( ) ) ( ( ) ( 5 ) )
millimètre au pixel par l'intermédiaire de
l'inverse des fonctions de changement de
repère : Jx et Jy défi nies dans
la paragraphe
II-1-a. et si (l'objet est une courbe
)
de Bézier), là il faudra dessiner un nombre de
segments égale à T(i,11) et reliant les
extrémités et .
Voici l'algorithme détaillé de la procédure
Dessiner :
Soit N le nombre d'objets du dessin.
Dessiner
Début
Pour jusqu'à N faire



Tracer Segment


Si non


Pour à faire



Tracer Segment

FPour.
FSi.
FPour.
Fin.
e) Sélection des objets :
Pour mieux manipuler les objets créés, il faut
pouvoir les sélectionner et sélectionner un objet pour
l'utilisateur, c'est cliquer sur ou proche de cet objet. M ais pour
l'ordinateur cliquer en n'importe quel endroit de la fenrtre de dessin ne
signifie rien, car la fenrtre de dessin n'est rien d'autre qu'une image au vrai
sens du terme. Donc ce qu'il faut programmer dans cette phase, c'est lors d'un
clic de souris il faut récupérer, les coordonnées du
point, les convertir en mm, calculer la distance de ce point par rapport
à tous les objets stockés dans le tableau T, trouver la plus
petite distance, la convertir en pixels, tester s'elle est inférieure
à quelques pixels. Si c'est le cas, l'objet est
sélectionné si non la sélection a échoué. M
ais avant de pouvoi r faire cel a, il faut d'abord définir la distance
entre un point et un objet. Les objets qui peuvent exister sont des segments de
droites et des courbes de Bézier formées elles aussi de petits
segments. Donc finalement calculer la distance par rapport à un segment
de droite devra suffire pour les deux types d'objets.
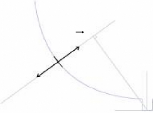
Exemple : Calcul de la distance d'un point par
rapport à un segment.
Soit un segment [AB], un point M du plan, et
N la projection de M sur
(AB).


Il existe 3 cas possibles :
1er cas : le point N est compris entre
A et B. Dans ce cas là la distance entre M et
[AB] sera alors MN.
B
N
A
M
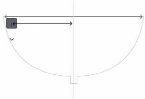
2ème cas : le point N n'est pas
compris entre A et B, et situé du côté de
A. Dans ce cas là alors, la distance entre M et
[AB] sera MA.
B

A
N
M
3ème cas : le point N n'est pas
compris entre A et B, et situé du côté de
B. Dans ce cas, la distance entre M et [AB] sera
MB.
N B
A
M


Algorithme de la fonction calculant la distance entre un point M
et un segment de droite :
Distance
A
Début
Si alors
Si alors


FSi
Si alors
Distance
FSi
Si alors
Distance
FSi
Si non
Si alors



Distance
FSi
Si alors
Distance
FSi
Si alors
Distance
FSi
FSi
Fin
Algorithme de sélection d'objets :
Sélection
Début



Pour à faire
Si alors


Si Distance
alors

Distance
FSi
Si non



Pour à faire



Si Distance
alors
Distance

( P P
FSi

FSi
FPour
FPour
alors
Objet Sélectionné
Si


Si non

Objet Sélectionné
FSi
Fin
f) Enregistrement et chargement des objets
:
L'enregistrement du dessin implique l'enregistrement du
tableau T. Visual Basic offre la possibilité d'enregistrement dans des
fichiers textes qui sont simples à utiliser et unidimensionnels.


Le tableau T étant bidimensionnel, pour l'enregistrer
il faut le transformer en un tableau unidimensionnel qu'on appellera S. Chaque
ligne du tableau S doit contenir toutes les informations nécessaires
pour identifier un objet. On prendra alors les données du tableau S
comme des chaînes de caractères contentant les valeurs du tableau
T suivant la direction j et séparées par le caractère

Position de chaque couple
importé
Génération de la coque
du bateau
Paramètres du calcul
Résultats du calcul
Liste des couples importés
Faire monter un couple vers le haut
Faire descendre un couple vers le bas
Supprimer un couple
Fenêtre de visualisation 3D
Ligne de flottaison
Paramétrage de la vue
Fig. 9 : Interface du module de calcul.
a) Affichage en 3D :
Lorsqu'on regarde un couloir infiniment long, on remarque
qu'il y a une intersection à l'infini des traits représentant le
couloir ce qui n'existe pas réellement puisque les bords du couloirs
sont parfaitement parallèles. Cet effet n'est rien d'autre que l'effet
de la vue en 3D réelle et c'est ce qui fera l'objet de l'étude
suivante :
Z
C
O
P
M
Y
X
N
Fig. 10 : Affichage en 3D sur un écran
assimilé à un plan.
On considère un écran qu'on assimilera à
un plan auquel lié un repère (O,X,Y,Z) et un point C de
coordonnées (0,0,-d) comme le centre de notre caméra virtuelle.
Pour afficher un objet dans l'espace sur le plan P, il faudra le
décomposer en éléments élémentaires (des
segments de droites) et trouver les éléments
élémentaires correspondants sur P à partir de
l'intersection des droites (CM) où M est une
extrémité


de l'objet élémentaire, et le plan P (voi
r fig. 10), ainsi l'objet sera vue l'écran avec un effet de réal
isme comme cité au début de ce paragraphe.
Modélisation mathématique :
Soit le segment [MN] dans l'espace où
,et
( x y z ( x y z 0 d
L'équation mathématique des deux droites (CM)
et (CN) seront alors :

xM
zM
yM
zd
M
x N
z N
y N
zN
d
et
et
z b
avec
z b
avec
a1
a2
1
2
L'intersections des droites (CM) et (CN) avec le plan seront
Donc finalement afficher l'objet MN revient à dessiner
un simple segment de droite >OJlJ] sur l'écran (P) et de la
même manière on pourra afficher des objets beaucoup plus complexes
tels que les couples d'un bateau.
Remarque :
Dans cette étude, on a considéré que le
repère dans lequel sont exprimées les coordonnées des
points M et N est le mrme que celui de l'écran ce qui ne permet pas un
affichage dynamique en 3D. Autrement dits on ne peut pas survoler l'objet,
l'approcher ou bien l'éloigner... donc il faut considérer un
autre repère qu'on appellera LabsoluL et c'est dans ce repère que
les coordonnées des objets seront expri mées. Et pour pouvoir
changer l'angle de vue ou le rapprochement de l'affichage, il suffira de
changer les coordonnées de la caméra vi rtuel le.
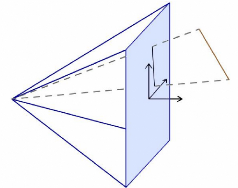
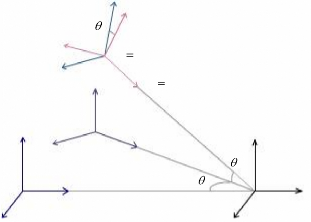
On considère maintenant deux repères, un
repère absolu (O,X,Y,Z) dans lequel sont exprimées les
coordonnées des objets y compris celles de la caméra et un
autre repère lié à la caméra
permettant l'affichage des objets (voi r
( X Y Z
fig.1 1)


Y 4
Y
O
X
Z
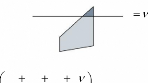
Fig. 11 : Obtention du repère de la
caméra
à parti r du repère absolu.
Il faut maintenant établir la matrice du changement de
repère.
Soit un point M de coordonnées : (x,y,z)
exprimées dans le repère absolu O(X,Y,Z). La position du
repère lié à la caméra est obtenue à partir
du repère absolu par 4 transformations simples :



Une translation suivant -Z : Une rotation suivant OY
:
Une rotation suivant la droite passante par O et
portée par :
Une rotation suivant :



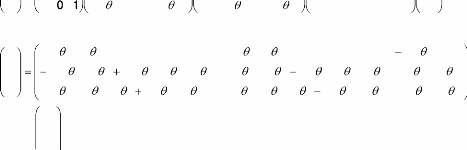
Ces transformations sont traduites par les équations
suivantes :


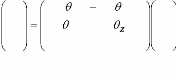
Donc :

Y
ós Cos
Cos Sin
0
in SinSin,Cos
in Sin Sin ,Cos
0
Y

Donc pour obtenir les coordonnées du point M il
suffit de les multiplier par la matrice A et là on
procédera à l'affichage en 3D.

X '
Y M
Z M
X
Y Z
b) Génération des surfaces :
La génération de surface fait partie des
principales fonctionnalités du module de calcul afin de pouvoir
visualiser clairement la coque du bateau en 3 dimensions. Les surfaces
générées sont des surfaces régl ées
crées à parti r de courbes qui peuvent rtre soit des courbes de
Bézier ou des segments. Lors de l'interpolation des courbes on
distinguera 3 cas :
U ne interpolation entre 2 segments de droites.
Une interpolation entre 2 courbes de Bézier.
U ne interpolation entre un segment de droite et une courbe de
Bézier.
Dans les trois cas les courbes sont divisées en un nombre
N de subdivisions précisé par l'utilisateur.
Exemple :
Soit deux courbes AB et MN dont on veut
dessiner la surface réglée et N le nombre de
subdivisions des deux courbes.


- 1er cas : Si AB et MN
sont des segments de droites. Algorithme :

Pour à faire
Ligne

FPour.
Ici, comme pour A et B, M et N ont le
même Z car le module de création dessine des courbes dans
le plan et non pas dans l'espace.
- 2ème cas : Si AB
est un segment de droite et MN une courbe de Bézier
d'angles de vecteurs tangents et, et de modules et.
Algorithme :
Pour à faire

Ligne
( y )

FPour.
sont toutes les deux
et


- 3ème cas :
des courbes de Bézier.
Algorithme :


Pour à faire

Ligne
( P P )
FPour.
c) Calculs :
La partie relative aux calculs (résolution de
problème d'équilibre du bateau) est la partie la plus
représentative du logiciel. Elle commence par fournir les données
et finit bien sur, par afficher les résultats. La donnée fournie
en plus de la forme géométrique de la coque du bateau, est
l'angle d'inclinaison, et le résultat obtenu est en fait un couple
physique qu'il faut raj outer (une masse fois sa distance par rapport à
l'axe du bateau fois g).
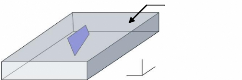
Lors de l'exécution du programme, la coque du bateau
est décomposée en des petits éléments de surface
plans tout en gardant dans la tête que la partie
submergée sous l'eau d'un côté du bateau n'est pas la mrme
que de l'autre côté puisque ce dernier est incliné. Les
petits éléments de surface plans sont obtenus à partir de
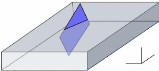
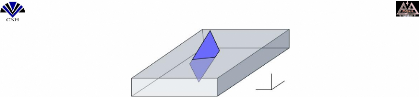
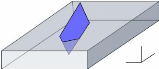
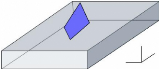
la décomposition des courbes (voir fig. 12.).
x
D
V
C1
S1
S2
Z B
A
C2
Fig. 12 : Interpolation de surfaces.
: Surface
générée à
partir
d'un segment de
la courbe C1 en
atteignant C2.
: Surface générée à partir d'un
segment de la courbe C2 en atteignant C1.
A partir d'un segment d'une courbe, on peut obtenir une petite
surface plane 51 en atteignant une autre courbe et inversement on obtient une
autre surface 52.
Remarques :
- Les surfaces 51 et 52 ne sont pas forcément les
mêmes car les courbes à partir desquelles sont obtenues ces
surfaces, peuvent être différentes et donc on peut


choisir pour le calcul de mécanique des f luides soit la
surf ace S1 soit
n ?
(
la surf ace S2 ce qui engendra des erreurs
de calcul assez considérables car la surf ace réelle n'est ni
S1 ni S2, elle n'est peut rtre mrme pas
plane. Donc pour minimiser ces erreurs de calculs on prendra une autre surf ace
qui est la moyenne des surf aces S1 et S2
en angle et ainsi on aurait obtenu des erreurs beaucoup plus
petites et
1 S
une surf ace plane générée à parti r
de deux segments de courbes.
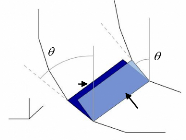
- L'élément de surface est obtenu ici à
partir de deux petits segments de courbes donc pour faire le calcul sur toute
la partie submergée sous l'eau de la coque du bateau, il suf f it de
passer au autres éléments de courbes et ainsi, on aura la
résultante du couple exercé par l'eau sur la coque du bateau. Il
ne faut pas oublier aussi que la bateau est incliné donc les points f
ormant les éléments de surf aces doivent subir une rotation
d'angle (l'angle d'inclinaison du bateau).

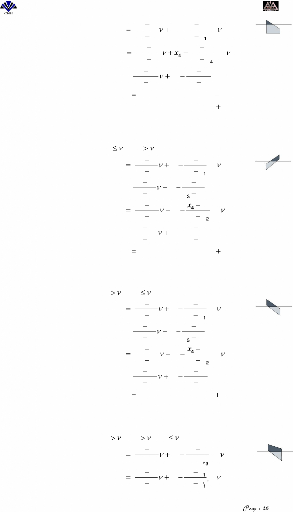
Calcul d'aire :
Contrairement aux surf aces S1 et
S2, la surf ace S plane, n'est pas rectangulaire
d'autant plus qu'il s'agit d'un polygone avec un nombre de points variant entre
3 et 5 suivant les cas suivants :

1er cas : Si les quatre points f ormant les
segments de courbes sont au dessous de la surf ace de l'eau appelée
ligne de f lottaison, le nombre de points de la surf ace S sera alors
4.
Li gne de f lottai son
0
B C
V
A
Z
X

2ème cas : Si un seul point est au-dessus
de la ligne de f lottaison, le nombre de points f ormant la surf ace est 5 avec
les points C' et D' (voir f igure ci-
dessous) obtenus par intersection de CD et BD
avec la ligne de f lottaison.
y
0
D' C
B
A
C'
X
V
Z

3ème cas : Si deux points de la
même courbe sont au-dessus de la ligne de f lottaison, le nombre de
points est alors 4 avec les points C' et D' obtenus par
intersection de AC et BD avec la li gne de f lottaison .
y

0
B
D' C'
A
C
X
V
Z



4ème cas : Si 3 points sont au-dessus de
la ligne de flottaison, le nombre de points est alors 3 avec les points C'
et B' obtenus par intersection de AC et
AB avec la ligne de flottaison.
y
0
B
B'
A
C
C'
X
V
Z

5ème cas : Si les 4 points sont au
dessus de la li gne de fl ottaison, la surface sera alors formée de 4
points mais elle ne sera pas comptée puisque elle est audessus de l'eau
et par la suite il n'y exerce aucun effort.
0
B
A
C
X
V
Z
0'après ces 5 cas on voit bien que l'élément
de surface qui va être utilisé dans la relation : change en
fonction de sa position par rapport à la
n ?
(
surface de l'eau, donc écrire une fonction qui calcule
l'aire de sa partie submergée sous l'eau facilitera
énormément la programmation du calcul de l'effort appliqué
par l'eau sur la coque.
|
Posons l'équation de la surface de l'eau : Algorithme
de la fonction :
Fonction Aire
|
|
|
`P1, P2, P3 et
P4 sont les points formant l'élément de surface
dS'
|
|
Fonction AireTriangle
A
0ébut
|
`Fonction qui calcule l'aire d'un triangle ABC dans l'espace'
|







AireTriangle
2
Fin
|
Début
|
Si Alors
y
|
`Permutation de P1 et P2 de telle manière à ce que
P2 soit touj ours correspondant au point le plus haut du premier segment'
|
|
|

FSi
Si Alors
P2
P1
P4 V
P3
x

`De mrme permutation de P3 et P4 de telle manière
à ce que P4 soit toujours correspondant au point le plus haut du
deuxième segment'
FSi
Ligne de flottaison
Si et Alors
y y
Aire AireTriangle
( P P
AireTriangle
( P P P

V
P4
P2
Z
`1er Cas'
P1 P3
FSi
Si et etAlors
y y

`2ème Cas'

P4
P'2
P2
P1
P'3
P3






2

Aire AireTriangle
( P )
AireTriangle
( P P )
AireTriangle
P P P
FSi

`2ème Cas'
Si et etAlors
P2 P'4

4
Aire AireTriangle
( P P P )
AireTriangle
( P P )
AireTriangle
P P P
P'1
P1 P3
P4
FSi
Si et Alors
44 2
Aire AireTriangle
( P P )
AireTriangle
( P '
P P
FSi
Si et Alors
y y
44 2
Aire AireTriangle
( P
AireTriangle
( P P P
FSi
Si et etAlors
y y
`3ème Cas'
P4
P1
P2
P'2
P3
P'1
`3ème Cas'
y P3 3
P2
P1 P'4
P'3
P4
`4ème Cas'
P3
P1
P2
P'1
P4
P'4



Aire AireTriangle
( P P P
FSi

Si et etAlors
y y
P2 P3
P'2 P'3
`4ème Cas'
P1
P4






Aire AireTriangle
( P P
FSi
Si et Alors
y
Aire
FSi

`5ème Cas'

P2
P4
P3
P1
Fin
Ai nsi l'aire de l'élément de
surfacesubmergé est calculée, donc pour pouvoir appliquer la
relation de mécanique des fluides il reste
n ?
(
encore le calcul deet
est la différence entre la hauteur de la ligne de
flottaison et la moyenne des hauteurs des points formant le polygone
correspondant à l'élément de surface.
Exemple :
P2
P1
P3
P4


P3
P2
P4
P1

est le vecteur normal unitaire à l'élément
de surfacedi rigé vers l'eau est obtenu en résolvant le
système d'équations suivant :



L'élément de forceainsi calculé, il reste
maintenant à le traduire en
un couple physique élémentaire. Pour ce faire,
on multipliepar la distance séparant l'origine du repère et la
droite passante par le centre de l'élément de surface et
portée par le vecteur tout en respectant les sens positifs et
négatifs.
X
d V

On procède de cette manière pour touts les
éléments de surface de la coque du bateau pour avoir le couple
total résultant appliqué par l'eau sur le bateau, et à
partir de ce couple trouvé, on saura systématiquement le couple
qu'il faut rajouter pour équilibrer le bateau, qui n'est rien d'autre
que son opposé.
Le couple nécessaire à l'équilibrage du
bateau étant connu, on le traduit en un poids (une masse fois g) et une
distance par rapport à l'axe du bateau où la masse va être
posée tout en respectant la largeur maximale du bateau.
C'est-à-dire qu'on ne pourra pas poser une masse à 15
mètres de l'axe alors que le bateau de fait que 8 mètres de
largeur. Afin de résoudre ce problème, cette distance est prise
de l'ordre de 80% de la moitié de la largeur maximale du bateau.
Exemple :




atia, le leader mondial des solutions 3D et de gestion du
cycle de vie des produits (PLM Product Lifecycle Management) comprend un module
de marine (Design Concept Marine) qui pourra résoudre facilement le
problème d'équilibrage de bateaux. Donc finalement le stagiaire
Ensamien n'a rien inventé, mais au lieu de se procurer une licence de
Catia à 1 400 000 Dh de la part de l'entreprise, elle a pu
résoudre le même problème au prix de deux mercis seulement
: un merci de la part de l'encadrant et un autre merci de la part du patron, le
patron pour qui, les seules raisons d'investir au Maroc sont avoir une main
d'oeuvre moins chère et un pouvoir divin sur des ouvriers
marocains terrifiés par un cauchemar appelé
chômage.
Certaines améliorations du logiciel conçu
peuvent aussi faire l'objet d'un nouveau stage pour un autre
élève ingénieur, citons à titre d'exemple : une
génération de la coque du bateau par des surfaces de
Bézier au lieu des surfaces réglées ou encore un maillage
triangulaire lors de l'interpolation des éléments de surface pour
augmenter un petit peu plus la précision du calcul, même si les
calculs actuels répondent largement aux exigences des constructeurs
navals en matière de précision. Il reste maintenant un dernier
stage avant le Projet Industriel de Fin d'Etudes, espérons qu'il soit si
bénéfique lui aussi, que cela soit sur le niveau technique,
humain ou culturel afin d'enrichir au maximum la formation d'ingénieur
Arts et Métiers basée principalement sur les trois volets :
savoir, savoir faire et savoir être.

| 

