Chapitre 4
Tests et résultats
Chapitre IV Tests et
résultats
64
Chapitre IV : Tests et résultats
IV.1. Introduction :
Dans ce chapitre, le but est de donner une description des
différents tests effectués sur le système tels que le test
des angles du Gyro et les signaux de sortie du récepteur RF. Je
présenterai également les techniques utilisées pour
définir les gaines PID adapté à ce quadrotor puis les
résultats obtenus seront utilisés dans le sous-programme de
contrôleur PID, afin d'avoir la stabilité
désirée.

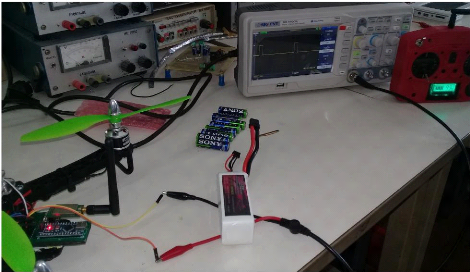
Figure 4.1 : Image du quadrotor
réalisé.
IV.2. Test des signaux du récepteur RF
:
Afin d'éviter tous problèmes de
disfonctionnement et pour s'assurer qu'on a une bonne communication radio, il
est donc nécessaire de tester les impulsions reçus par le
récepteur RF du quadrotor.
On commence par alimenter le récepteur RF avec 5v
séparément au circuit du contrôleur de vol, puis on
connecte le canal de sortie Throttle du récepteur au canal CH1 de
l'oscilloscope digital pour visualiser le signal reçue Figure
4.2.
Chapitre IV Tests et
résultats
65
Figure 4.2 : Connexion du récepteur RF à
l'oscilloscope digital.
Le signal PWM qui correspond à la commande Throttle
apparaisse sur l'écran de l'oscilloscope avec une période de
50Hz, Figure 4.3.
Calibre de l'oscilloscope : Tension : 1 Div ? 2
volt Base de temps : 1 Div ? 2.5 ms.

Figure 4.3 : Signal PWM 50Hz de la commande
Throttle.
Chapitre IV Tests et
résultats
66
En agissant sur la position du joystick de la commande
Throttle du transmetteur, on voie bien que la largeur de l'impulsion PWM varie
de 1ms à 2ms, Figure 4.4 et Figure
4.5. La même procédure de test est effectuée pour
les signaux de commande Roll, Pitch et Yaw.
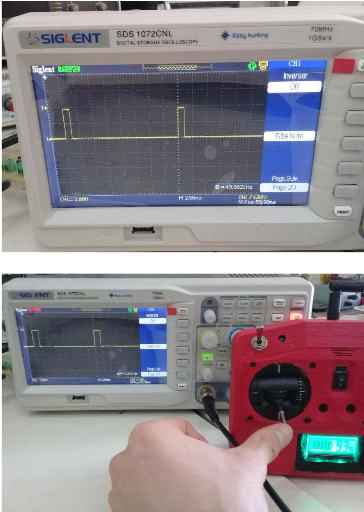
Figure 4.4 : Largeur d'impulsion 1ms.
Figure 4.5 : Largeur d'impulsion 2ms.
IV.3. Chapitre IV Tests et
résultats
67
Test des données angulaires du Gyroscope
:
Nous vérifions les angles de l'IMU pour éviter
les problèmes de commande et les mouvements non désirés,
pour ce faire j'ai introduit l'instruction Serial.print ( ); dans le
sous-programme de lecture des données Gyro MPU6050. Cette instruction
permet d'afficher les angles d'inclinaison du quadrotor en degré pour
les axes Pitch, Roll et Yaw sur le moniteur série de L'Arduino IDE, le
processus est illustré dans la Figure 4.6.
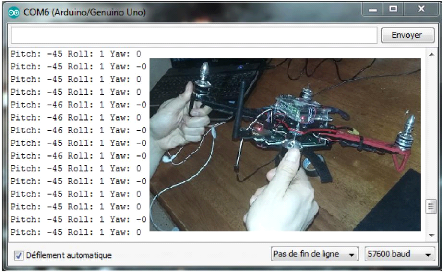
Figure 4.6 : vérification des angles de Gyro
sur l'Arduino IDE.
Le quadrotor est incliné suivent les 3 axes de
mouvement citées en haut. On vérifie si les angles correspondent
au mouvement du quadrotor sont compatible avec la norme mentionné au
Chapitre III page (48) que j'ai utilisée pour ce
contrôleur de vol.
IV.4. Identification des gains PID :
Comme déjà dit dans le chapitre
précédent, les gains K???? ,
K1 et Kd du
contrôleur PID seront déterminées expérimentalement
en agissant sur ces gains d'une manière à stabiliser le quadrotor
pendant le vol et donc une convergence rapide de l'erreur e
vers zéro.
Pour éviter les dégâts et le comportement
indésirable du quadrotor, il est nécessaire de varier les gains
PID avec un ordre correct [19].
C'était une pratique courante de commencer le
réglage avec des valeurs de gain Kd
très faible ou nulle. Mais en revanche, il est
préférable de définir le gain K ????
pour les axes Pitch, Roll et Yaw à "1" et les autres
à zéro, afin de voir comment le quadrotor réagit au
début. Pour ajuster les gains du PID,
Chapitre IV Tests et
résultats
68
on maintient le quadrotor fermement dans la main, puis on
augmente le Throttle jusqu'au moment où le quadrotor commence à
osciller, Figure 4.7.

Figure 4.7 : Réglage des paramètres
PID.
Au début, on fixe le gain ???? ???? de 4 et le gain
???????? de 0.02 pour l'axe de mouvement lacet (Yaw), car cette configuration
de base empêchera le quadrotor de flotter quand nous essayons de le faire
voler, le réglage du gain ???????? pour l'axe de lacet n'est pas
nécessaire parce que le lacet a une traînée des
hélices donc il reste à zéro ???????? = 0.
Pour les deux axes de mouvement Pitch et Roll les gains PID
seront les mêmes. On commence par incrémenter le gain ????????
avec un pas de 3, jusqu'à ce que le quadrotor semble agité. Dans
ce cas j'ai trouvé ???????? = 18. On fixe ???????? à 18 puis on
augmente le gain ???? ???? avec un pas de 0.2 et on continue
l'incrémentation jusqu'à ce que le quadrotor cesse d'osciller.
Après, on diminue le gain ???? ???? de 50% et le résultat devrait
être le gain ???? ???? de base, j'ai trouvé ???? ???? = 1.3.
Enfin, nous commençons à incrémenter le
gain ???????? avec un pas de 0,01 et on continue à augmenter et tester
(chaque fois en introduit le nouveau gain en compilant le code du
contrôleur de vol) jusqu'à ce que le quadrotor commence à
osciller lentement. Quand cela arrive, on diminue le gain ???????? de 50% et le
résultat devrait être le gain ???????? de base, j'ai trouvé
???? ???? = 0.04.
Chapitre IV Tests et
résultats
69
Suivent ces procédure, j'ai réussi à obtenir
une bonne stabilité du quadrotor pendent le vol. Les valeurs des gains
PID du quadrotor pour les 3 axes de mouvement sont représentées
comme suit :
|
·
|
Tangage (Pitch) :
|
K ????
|
=
|
1.3
|
K1 = 0.04
|
Kd = 18
|
|
·
|
Roulis (Roll) :
|
K ????
|
=
|
1.3
|
K1 = 0.04
|
Kd = 18
|
|
·
|
Lacet (Yaw) :
|
K ????
|
=
|
4
|
K1 = 0.02
|
Kd = 0
|
Enfin, ces gains sont introduits dans le programme principal du
contrôleur de vol du quadrotor.
IV.5. Test de vol en zone ouverte:
Une fois que le drone semble assez stable pour voler en toute
sécurité, nous serons capables d'effectué un premier vol
prudent dans un espace ouvert, voici quelque photos du premier vol
effectué dans l'USTHB Figure4.8.

Figure 4.8 : Test de vol dans un espace
ouvert.
Chapitre IV Tests et
résultats
70
IV.6. Conclusion :
Dans ce chapitre, les tests effectués sur le
système ont été décrits à l'étape.
Les gains PID ont été déterminés
expérimentalement et la stabilité a été atteinte.
Les tests de communication radio et d'orientation du quadrotor ont
été menés. Les résultats obtenus sont bonnes.
71
| 

