2.2.3.3. Classification de l'image satellitaire
2.2.3.3.1. La classification non supervisée,
supervisée et signature spectrale
25
classes pertinentes en s'appuyant sur la composition
colorée et l'Indice par Différence Normalisée de la
Végétation (NDVI) pour permettre la discrimination de la
végétation. Ceci a abouti à la création de quatre
classes d'occupation du sol dans la zone d'étude. Il s'agit des classes
Forêt, Savane herbeuse, Savane et Sol nu et Bâtis. Cette
élaboration s'est basée sur la fusion des classes redondantes de
la classification non supervisée afin de maintenir quatre classes
d'occupation du sol dans la zone d'étude. Notamment :
? le sol nu et bâtis : ce complexe
montre toutes les surfaces occupées par les bâtiments, les routes,
le sol nu. C'est ce que Forman (1995) appelle des espaces fortement
anthropisés ;
? savane herbeuse : cette classe
représente toutes les surfaces couvertes par une
végétation d'une herbe abondante. Par exemple, les champs.
? Savane : regroupe toutes les surfaces
couvertes par une végétation dépourvue des grands arbres.
Elle peut être une savane arborée, boisée mais autre que la
savane herbeuse;
? la Forêt : cette classe regroupe
toutes les surfaces couvertes de bois, de nombreux arbres proches.
La procédure à suivre dans le traitement des
données afin de réaliser une classification acceptable est
reprise dans la figure 2.2 ci-dessous.
26
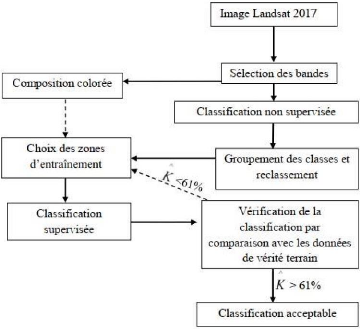
Figure 2.2. Etapes principales pour la
classification de l'image, depuis le choix de l'image jusqu'à la
classification acceptable.
Les statistiques radiométriques de ces classes ont
été extraites d'une part des bandes spectrales du rouge
(0,62-0,69ìm) et du proche-infrarouge (0,76-0,90ìm) et
projetées sur des axes orthonormés où l'axe des Y indique
les valeurs du niveau de gris dans le rouge et l'axe des X indique les valeurs
du niveau de gris dans le proche infrarouge, afin de regrouper les classes
radio-métriquement proches.
2.2.3.3.2. Evaluation de la qualité de la
classification supervisée
Le coefficient Kappa a été
généré (équation 1) dans la matrice de confusion
calculée à partir du logiciel Envi 4.7 en confrontant les
données de vérité de terrain dont les coordonnées
géographiques prélevées à l'aide du GPS Garmin 60s
avec les résultats de la classification supervisée. Les
coefficients suivants également ont été
générés : La précision totale qui est le nombre de
pixels bien classés divisé par le nombre total d'individus,
l'erreur d'omission et l'erreur de commission.
27
Dans l'équation (1), r est le nombre de
rangées dans la matrice de confusion, xii est le nombre
d'observation dans la rangée i et la colonne i sur la
diagonale, x1+ représente le total des observations dans la
rangée i et x+1 est le total des observations dans la
colonne i. N est le total des observations dans la matrice.
A partir de cette matrice, la précision globale de la
classification est donnée par la moyenne des pourcentages des pixels
correctement classés (MPPCC ) dans l'équation (2)
| 

