Chapitre 2 : Analyse fonctionnelle du
Système de Gestion d'eau
10
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
2.1 Introduction :
Dans ce chapitre nous allons présenter l'étude
fonctionnelle du système de distribution d'eau puis définir les
règles d'automatisation essentielles à suivre et identifier les
équipements nécessaires pour réaliser la solution
automatisée. On détaillera en particulier le fonctionnement des 4
parties à savoir : le château d'eau, la bâche à eau,
le système anti-incendie et le système d'irrigation.
On abordera également le cas de l'élaboration d'une
solution programmable dans le cas où la gestion demande
l'interdépendance des systèmes et la synchronisation entre
eux.
2.2. Cahier des charges fonctionnel :
Nous avons divisé le système en quatre parties
essentielles chaque une est géré par un automate siemens de type
S7-1200, programmé pour faire le contrôle à distance et en
temps réel à partir d'une station de supervision situé
à la salle de contrôle.
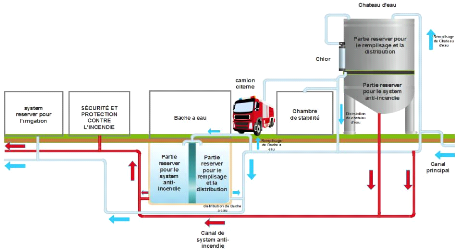
Figure 2.1: Schéma synoptique global
après l'automatisation
2.2.1 Le Remplissage du château d'eau et la
Distribution :
Afin d'éviter les débordements et le manque
d'eau récurrents constatés sur le château d'eau et
éliminer toute intervention humaine sur le fonctionnement des groupes de
pompage, l'exploitant du site a exprimé le besoin d'automatiser le
château d'eau ainsi que la télégestion de ce dernier via la
supervision de secteur avec le SIMATIC WINCC.
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
Gérer par un automate indépendant du type siemens
S7-1200, l'automatisation du remplissage et de la distribution de l'eau
à partir du château d'eau est réalisé en tenant
compte des paramètres suivants :
Ø Contrôle du niveau de chlore.
Ø Commandes des électrovannes canalisations
principales et de distribution.
Ø Commande des pompes de remplissage avec synchronisation
entre elles.
Ø Contrôle du niveau d'eau réservé
à l'utilisation quotidienne et du réseau anti-incendie.
Ø Détection de la présence d'eau dans la
canalisation SEACO et contrôle du débit.
Ø Déclenchement d'alarmes en cas des
défauts au niveau des pompes et/ou des électrovannes ou d'une
surabondance ou absence d'eau.
11
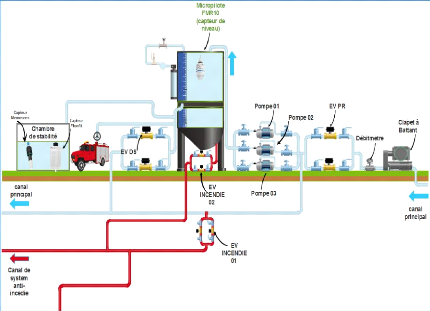
Figure 2.2: Schéma synoptique du
château d'eau après l'automatisation
12
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
2.2.2 Le remplissage de la bâche à eau
et la distribution :
La bâche à eau aussi est gérée par un
automate de même type et de mêmes caractéristiques que celui
utilisé pour l'automatisation du fonctionnement du château
d'eau.
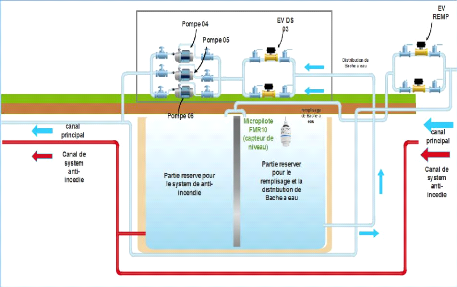
Figure 2.3: Schéma synoptique de la
Bâche à eau après l'automatisation
L'automatisation du remplissage et de la distribution de
l'eau à partir de la bâche à eau est réalisée
en tenant compte des paramètres suivants :
Ø Commande des électrovannes (ouverture/
fermeture) de remplissage et distribution.
Ø Commande des pompes de distribution avec
synchronisation entre elles.
Ø Contrôle du niveau d'eau réservé
à l'utilisation quotidienne et du réseau anti-incendie.
Ø Déclenchement d'alarmes dans le cas de :
défauts ou pannes au niveau des pompes, des électrovannes ou en
cas de débordement ou manque d'eau.
Ø Surveillance et contrôle à distance en
temps réel de toutes les opérations.
2.2.3 Système anti-incendie :
Pour contrôler et surveiller à distance et en
temps réel la station de surpression, on a choisi d'utiliser un automate
spécifique pour gérer et surveiller le fonctionnement de ce
système.
13
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
Ce dernier va remplacer la carte électronique existant sur
le système actuel et dont le cout est très élevé et
qui n'est ni contrôlable ni observable à distance.
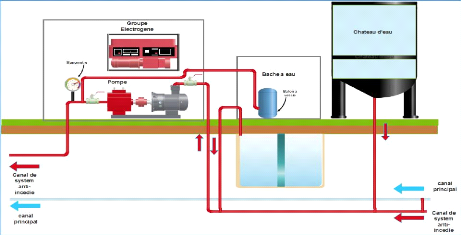
Figure 2.4: Schéma synoptique de la
station de surpression après l'automatisation
2.2.4 Système d'irrigation :
Pour assurer l'indépendance de ce système et
éliminer les inconvénients du système actuel, on a choisi
de consacrer au système d'arrosage, son propre automate. Ce dernier aura
à gérer l'arrosage de l'ensemble des espaces verts
répartis en 6 zones, grâce à une commande
automatisée périodique et à distance.
Le système est composé de tuyaux
équipés d'arroseurs, électrovannes et des pompes
directement branchés à la source principale de SEACO. L'ensemble
est ensuite relié à son propre API de type Siemens
S7-1200 permettant d'effectuer les différents réglages.
Cette option permet de planifier l'heure de l'arrosage et être
piloté à distance.
Cet arrosage automatique a pour objectif de réduire la
consommation d'eau par un arrosage optimal, diminuer les charges de personnel
et de maintenance, choisir les périodes d'arrosage sans contraintes,
limiter le ruissellement des eaux et l'érosion des sols.
14
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
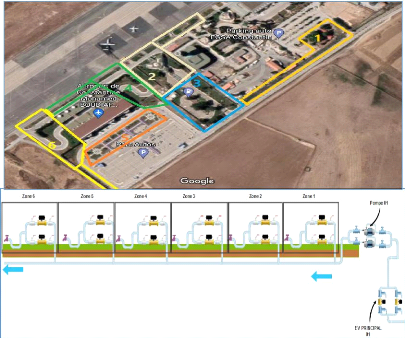
Figure 2.5 : Les zones d'irrigation
proposées
Remarques :
Le système global est basé sur la redondance
entre les équipements utilisés, dans le but d'augmenter les
performances en termes de fiabilité, disponibilité et
maintenabilité. Donc on a utilisé :
· Pour le château d'eau trois pompes de
remplissage. Dans le but de ne pas épuiser ces dernières on
procédera par combinaison lors de l'alimentation du château d'eau.
Ces combinaisons sont effectuées par rapport au niveau de château
d'eau.
· Pour les trois pompes de distribution de la
bâche à eau, la permutation entre eux se fait aussi par rapport au
niveau de réservoir.
· Les deux électrovannes placées en
parallèle aux différents points de système global ont un
fonctionnement alternatif. Elles remplissant les mêmes fonctions ou
missions, une seule suffit pour le fonctionnement normal, la deuxième
sert en cas de défaillance de la première ou dans le cas d'une
surcharge du système.
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
2.3. Description de la partie matérielle de la
solution proposée :
La mise en oeuvre d'un système automatisé revient
à mettre en interaction un ensemble d'éléments
organisés sous la forme d'un schéma identifiant trois parties :
partie opérative (PO), partie commande (PC) et partie pupitre ou
utilisateur (PP) du système
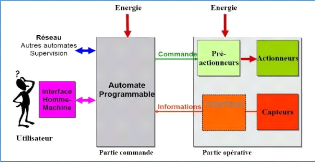
Figure 2.6 : Structure d'un système
automatisé
La partie opérative représente le sous-ensemble
qui effectue les actions physiques, mesure des grandeurs physiques et rend
compte à la partie commande. Elle comporte :
· Des capteurs qui communiquent à la partie
commande des informations sur l'état du système
· Des pré-actionneurs qui reçoivent des
ordres de la partie commande ;
· Des actionneurs (vérins, moteurs, vannes) qui
ont pour rôle d'exécuter ces ordres. 2.3.1. Les
capteurs :

Dans notre projet, nous utilisons un certain nombre de
capteurs, que nous détaillons dans ce qui suit.
a/. Capteur de chlore (CCS51D) :
Le Memo sens CCS51D est une sonde de chlore libre robuste qui
nécessite peu d'entretien. Elle délivre des valeurs
mesurées très précises avec une stabilité à
long terme dans l'eau et assure une surveillance constante de la
désinfection, même dans de faibles volumes d'eau. La sonde de
chlore libre se caractérise par des temps de réponse
extrêmement rapides, ce qui garantit un contrôle efficace du
process. Grâce à la technologie numérique Memo sens, la
CCS51D combine intégrité maximale du process et des
données, avec un fonctionnement simple. [7]
15
Figure 2.7 : Memo sens CCS51D
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
b/. Capteur de niveau Radar à émission
libre (Micro pilot FMR10) :
Le radar de niveau Micro pilot FMR10 offre une mesure de
niveau continue sans contact et est idéal pour un grand nombre
d'applications dans le domaine de l'eau, des eaux usées et des
utilités industrielles. Le FMR10 fait partie des premiers radars sans
contact à technologie Bluetooth® pour une configuration et un
diagnostic d'une rare simplicité. Les courbes de signaux se visualisent
sur une application disponible pour tous les smartphones ou tablettes
Bluetooth® (iOS, Android). Grâce à un composant
électronique RF unique, le radar est très compact et s'installe
facilement dans les espaces réduits. [7]

Figure 2.8 : Radar à émission
libre
c/. Capteur de pression (Cerabar PMC11) :
Le Cerabar PMC11 est un transmetteur de pression compact avec
un excellent rapport qualité/prix. Il est doté d'une cellule
capacitive céramique sans huile et permet de mesurer la pression
relative de 400 mbar à 40 bars. Le PMC11 est destiné aux
applications standards dans l'industrie et peut résister aux conditions
de process grâce à l'utilisation de matériaux de
qualité comme l'acier 316L et 99,9% Al2O3. [7]

16
Figure 2.9 : Cerabar PMC11
17
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
d/. Débitmètres
électromagnétiques- Proline Promag W 400 :
Avec ses agréments internationaux pour les transactions
commerciales et l'eau potable, le Promag W peut être utilisé dans
les applications les plus diverses. Il est disponible en version compacte ou
séparée. Le Promag W 400 permet d'économiser du temps et
de l'argent grâce aux fonctionnalités étendues de son
transmetteur optimisé pour l'eau et les eaux usées. De plus, la
technologie Heartbeat garantit une mesure fiable et une vérification
conforme. C'est un Capteur avec protection anticorrosion EN ISO 12944 et
transmetteur de pointe pour l'eau et les eaux usées.
[7]

Figure 2.10 : Débitmètres
électromagnétiques
e/. Clapets à battant AVK :
Le clapet à battant est composé d'un disque qui
pivote sur une charnière ou un axe. Le disque se soulève du
siège pour permettre l'écoulement dans un sens. Lorsque la
pression diminue, le disque revient dans sa position initiale en se rabattant
sur le siège et bloque ainsi le fluide. Le poids du disque et le
débit ont un impact sur la fermeture du clapet.
Souvent un levier et un contrepoids ou un levier et un ressort
sont montés pour améliorer les performances. Les clapets
anti-retours avec levier et contrepoids conviennent aux installations
présentant un risque élevé de coup de bélier en
conditions d'écoulement normales. Les clapets anti-retours avec levier
et ressort de rappel conviennent pour les pressions élevées, les
contre-pressions insuffisantes et les vitesses d'écoulement
élevées. [8]
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
Nous choisissons ce clapet car il a 2 avantages principaux :
1. Le capotage est disponible avec des interrupteurs de fin de
course pour la surveillance à distance.
2. Anti-retour d'eau.

Figure 2.11: Clapet à battant AVK
f/. Capteur de niveau à flotteur Liquifloat
FTS20 :
Il s'agit d'un capteur TOR, c'est un dispositif suspendu
au-dessus d'un plan d'eau au moyen d'un câble électrique.
Lorsque le niveau de l'eau augmente jusqu'à immerger le
dispositif, sa capacité de flotter et sa forme de poire l'oblige
à se retourner mettant ainsi deux fils en contact électrique.
[7]
Les poires nécessaires pour nos projets sont au nombre de
6 :
· 2 poires de niveau (niveau bas, niveau haut) dans le
château d'eau.
· 2 poires de niveau (niveau bas, niveau haut) dans le
réservoir de 300m3 de la bâche a eau.
· 2 poires de niveau (niveau bas, niveau haut) dans le
réservoir de 200m3 de la bâche a eau.
18
Figure 2.12: Liquifloat FTS20
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
g/.manomètre émetteur pmp71 :

Le capteur - transmetteur de pression Cerabar PMP71 avec
membrane métallique est utilisé dans les industries de process
pour mesurer la pression, le niveau, le volume ou la masse dans les liquides ou
les gaz. Le PMP71 est conçu pour les applications haute pression
jusqu'à 700 bars. Menu Quick Setup avec gamme de mesure librement
réglable sans indication de pression. Conçu selon IEC 61508 pour
l'utilisation dans des systèmes de sécurité SIL2/3 et
disponible avec certificat MID pour les applications de transactions
commerciales. [7]
19
Figure 2.13: manomètre pmp71
h/. Capteur d'humidité du sol :
Pour minimiser le gaspillage d'eau surtout en hiver, nous
avons ajouté un capteur d'humidité du sol au réseau
d'arrosage avec une communication RS485 standard MODBUS Protocol qui facilite
la connexion avec l'API.

Figure 2.14: Capteur d'humidité du sol
(MODBUS Protocol)
2.3.2. Les pré actionneurs : a/. Contacteurs
:
Le contacteur est un appareil mécanique de connexion
ayant une seule position de repos et une seule position de travail. II est
capable d'établir, de supporter et d'interrompre des courants dans les
conditions normales du circuit, y compris les conditions de surcharges en
service.
20
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
L'intérêt du contacteur est de pouvoir être
actionnés manuellement ou automatiquement et à distance au moyen
de contacts peu encombrants et sensibles. [4] [5]
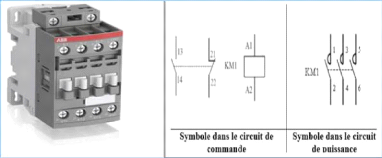
Figure 2.15 : Un contacteur
b/ Relais électromagnétique Ac/Dc 24v
(KONTRON ) :
Un relais électromagnétique, dans son principe
de commutation, s'apparente à un interrupteur mécanique dont la
manoeuvre serait non pas effectuée manuellement, mais en faisant
circuler un courant dans le circuit d'excitation du relais. Ce circuit est
constitué par une bobine appelée bobine d'excitation ou bobine de
commande.
La mise en action du relais par sa bobine de commande demande
une puissance électrique faible. Elle provoque l'ouverture ou la
fermeture d'un circuit dans lequel circule un courant élevé, et
par là même elle peut commander une puissance beaucoup plus grande
que la puissance d'excitation. [3]
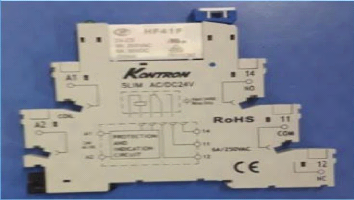
Figure 2.16 : Relais
électromagnétique KONTRON
21
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
c/ Disjoncteurs:
Le disjoncteur constitue l'appareil de protection par
excellence. C'est un interrupteur capable de s'ouvrir automatiquement en cas de
défaut pour couper les courants de court-circuit.
Il permet d'assurer une protection contre tous les
défauts. [4] [5]
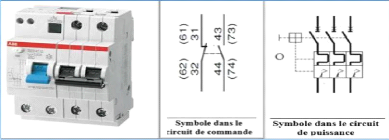
Figure 2.17 : disjoncteur :
représentation et symbole
2.3.3. Les actionneurs :
Dans un système automatisé, un actionneur est
un organe de la partie opérative qui a un ordre de la partie commande
via le pré-actionneur, convertit l'énergie qui lui est fournie
sous une forme utile pour les taches de programme dans un système
automatisé.
a/. Les pompes :
Une pompe est une machine hydraulique qui aspire et refoule
un liquide (eau, huile, Essence...) d'un point à un endroit voulu. Une
pompe est destinée à élever la charge de liquide
pompé. Pour remplir notre château d'eau et la Bâche à
eau on utilise le même type de pompe déjà existé qui
est la pompe centrifugeuse. Elles agissent sur l'énergie
cinétique et le mouvement du liquide résulte de l'augmentation
d'énergie qui est communiquée par la force centrifuge.
Une pompe centrifuge est constituée essentiellement de
:
· Une roue à aubes tournant autour de son axe,
· Un distributeur dans l'axe de la roue
· Un collecteur de section croissant, en forme de spirale
appelé volute.
Tous ces composants sont enveloppés dans un corps qui
est accouplé avec un moteur asynchrone qui fournit l'énergie
cinétique nécessaire pour la rotation de la roue à aubes
de la pompe. [6]
22
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
Pour ce projet, on utilise trois pompes de 3.5kw pour le
remplissage du château d'eau, trois autres de 3.5kw pour la distribution
de la bâche a eau, deux de 5.5kw pour le réseau d'irrigation et
les deux déjà existantes pour le réseau anti-incendie.

Figure 2.18 : Pompe centrifuge
b/. Les Vannes :
Une vanne est un dispositif destiné à
contrôler le débit de l'eau dans une canalisation. Elle est
utilisée pour arrêter ou pour faire circuler l'eau dans les
conduites. On distingue 2 types de vannes : les vannes électriques et
les vannes manuelles.
? Vannes électriques :
Comme vanne électrique, on peut citer la vanne
motorisée. La commande de cette vanne se fait par un API. Elle est
constituée d'un corps de vanne, d'un volant de commande manuelle et d'un
moteur réducteur alimenté en 380V comportant un limiteur d'effort
d'ouverture et de fermeture. L'ouverture ou la fermeture de la vanne est
effectuée grâce à l'entrainement de la tige de l'opercule
ou papillon par le moteur électrique (asynchrone triphasé
démarrage direct 2 sens de rotation).

Figure 2.19 : Exemple de Vannes
électriques
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
? Vannes manuelles :
On les désigne comme vannes manuelles car leur commande
s'effectue manuellement. On distingue deux types : les vannes avec bras et les
vannes avec robinet. [6]

23
Figure 2.20 : Vannes avec bras Figure
2.21 : Vannes avec robinet.
2.3.4. L'automate programmable industriel (API):
Un automate programmable industriel, ou API, est un
dispositif électronique programmable destiné à la commande
de processus industriels. Il envoie les ordres vers les prés actionneurs
à partir de données d'entrées (partie commande ou PC
côté capteur), de consignes et d'un programme informatique.
[09]
Un API peut être compacte ou modulaire :
· L'API compacte ou monobloc possède un nombre
d'entrées et de sorties restreint et son jeu d'instructions ne peut
être augmenté. Ce type a pour fonction de résoudre des
automatismes simples avec la logique séquentielle et utilisant des
informations TOR.
· L'API modulaire est adaptable à toutes
situations. Selon le besoin, des modules d'E/S analogiques sont disponibles en
plus de modules spécialisés. La modularité permet un
dépannage rapide et une plus grande flexibilité.
D'après le cahier de charge qui nous a
été établi, le choix de l'automate doit se faire en tenant
compte des critères suivants :
Ø Les nombres et la nature d'entrées/sorties.
Ø Le type du processeur et sa capacité de
traitement.
Ø La nature de traitement souhaité (temporisation,
comptage régulation...etc).
Ø La communication avec d'autres automates.
Ø Le dialogue (la console programmation, pupitre,
écran de supervision).
Ø La fiabilité et la durée de la
garantie.
Ø Le coût de l'automate.
Ø La qualité du service après-vente.
24
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
Pour notre projet, l'automate le mieux adapté à
notre problématique et qui représente le meilleur choix c'est
l'automate modulaire de la famille S7-1200.
2.3.5 Les autres équipements
a/ Alimentation de type Schneider (ABL8REM24050) :
C'est une alimentation en mode commutation
régulé c'est-à-dire une alimentation électrique
dont la régulation est assurée par des composants
électroniques de puissance utilisés en commutation.
L'influence de la température ambiante joue un
rôle déterminant dans la limitation de la puissance qu'une
alimentation électronique peut délivrer en permanence. Si les
composants électroniques sont dans un environnement où la
température ambiante est trop élevée, leur durée de
vie sera considérablement réduite.
La gamme Optimum des alimentations Phaseo est
conçue pour fonctionner à une température ambiante
nominale de 50 °C. Au-delà, il est nécessaire de recourir
à une réduction de charge jusqu'à une température
maximale de 60 °C.
La réduction de charge doit être prise en compte
dans des conditions de fonctionnement extrêmes, telles que :
· Fonctionnement intensif (courant de sortie proche en
permanence du courant nominal, avec une température ambiante
élevée)
· Tension de sortie définie comme
supérieure à 24 VCC (pour compenser les chutes de tension en
ligne, par exemple)
· Raccordement parallèle pour augmenter la
puissance totale. [2]

Figure 2.22: Power Supply Schneider
25
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
b/ Réservoir à vessie :
Le réservoir à vessie permet d'accumuler l'eau
sous pression. Il est idéalement utilisé pour réduire le
nombre de démarrages d'une pompe, ce qui augmente la durée de vie
de celle-ci. Pour notre projet, on a utilisé :
· Deux réservoirs à vessie pour la Station de
surpression eau incendie.
· Un réservoir à vessie pour les deux pompes
d'arrosage.

Figure 2.23 : Réservoir à
vessie
c/. Afficheur RIA15 :
L'afficheur de process est disponible en 4 à 20 mA ou
protocole HART®. La version HART® permet de visualiser en alternance
jusqu'à 4 valeurs mesurées d'un capteur sur le terrain ou en
façade d'armoire.
Pour cela, l'afficheur peut être réglé
comme maître HART® primaire ou secondaire et interroge activement
les valeurs du capteur. La faible chute de tension de < 1 V (< 1,9 V avec
HART®) est un avantage considérable, notamment dans les
applications Ex dans lesquelles seule une faible tension est disponible dans la
plupart des cas. [7]

Figure 2.24: Afficheur RIA15
26
Chapitre 2 : Étude Fonctionnelle du
Système de Gestion de l'Eau
d/ Groupe électrogène :
Un groupe électrogène est un dispositif autonome
capable de produire de l'électricité en cas de coupure de
l'alimentation du réseau électrique. Il ne nécessite qu'un
approvisionnement en carburant. L'électricité est toujours
produite par une génératrice (dynamo qui produit un courant
continu, ou alternateur qui produit un courant alternatif). Cette
génératrice doit recevoir un mouvement rotatif produit par un
moteur thermique essence, GPL ou diesel, équipé d'un
régulateur mécanique modulant sa vitesse de rotation en fonction
de la charge. [6]

Figure 2.25: Groupe Electrogène
e/ Clapet anti-retour:
Un clapet anti-retour est un dispositif (une vanne) permettant
de contrôler le sens d'un fluide dans une tuyauterie. Il instaure donc un
sens unique de circulation pour un liquide ou un gaz : ils peuvent
s'écouler vers l'aval, mais le clapet évite les remontées
en amont.[1] On va utiliser juste un clapet donne le canal
d'anti-incendie de bâche a eau.
| 

