6
CHAPITRE 1. GÉNÉRALITÉS SUR LES
RÉSEAUX DE CAPTEUR SANS FIL
dans l'interaction étroite avec l'unité de
détection et le processeur pour contrôler les mouvements du
noeud.
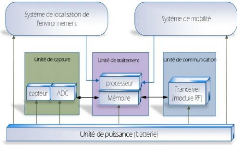
FIGURE 1.4: Architecture d'un capteur [2]
1.3 Caractéristiques et Contraintes des
RCSFs
Les réseaux de capteurs présentent des
caractéristiques intrinsèques au niveau des noeuds capteurs
(énergie, portée de transmission et puissance de stockage et de
traitement...) et au niveau du réseau formé par ces noeuds
capteurs (Bande passante, déploiement, type de réseau et
topologie dynamique).
1.3.1 Caractéristiques liées aux noeuds
capteurs
Les noeuds capteurs s'appuient sur certaines
caractéristiques pour transmettre les données du monde physique
sur lequel ils sont déployés :
L'énergie : Elle représente
une contrainte dans les réseaux de capteurs sans fil : Chaque noeud
capteur fonctionne avec une batterie, généralement, non
rechargeable avec une capacité limitée étant donné
sa petite taille. Dans la majorité des cas, ces noeuds capteurs sont
déployés dans des zones hostiles ou difficiles d'accès et
il est très peu probable qu'ils soient récupérables.
Aussi, vu leur nombre très grand (des milliers) on ne peut pas s'occuper
de chaque noeud capteur un à un.
La portée de transmission : Elle est
limitée par la capacité de rayonnement des antennes
utilisées et la puissance du signal mises en jeu. Par exemple, la
communication entre deux noeuds capteurs ne peut avoir lieu que si la distance
qui les sépare n'est pas trop importante (quelques dizaines de
mètres en pratique).
La puissance de stockage et de traitement :
Elle est relativement faible. Par exemple, les noeuds capteurs de type "mote"
sont composés d'un microcontrôleur 8 bits 4 MHz, 40 Ko de
mémoire et d'une radio de débit environ 10 kbps. Cela reste vrai
même pour les noeuds de moyenne gamme, comme les "UCLA/ROCKWELL'S WINS",
qui ont un processeur StrongARM
| 

