I.4. DOMAINES D'APPLICATIONS
Comme nous l'avons dit au début, plusieurs domaines
travaillent en collaboration pour le développement de telles
applications, tels que l'électronique, l'automatique et l'informatique
mais d'une manière un peu plus large, les systèmes temps
réel et embarqué sont utilisés dans plusieurs domaines
notamment :
· Transport (automobile, avion,
train,...)
· Produits
électriques/électroniques (caméra,
télévision, domotique, système audio, GPS,
téléphone cellulaire, console vidéo, Pda, ordinateur
portable, machine-à-laver, four à micro-ondes...)
· Contrôle de processus continus ou
discrets (production et distribution d'électricité,
production industrielle automatisée, optimisation de processeur de
transformation, contrôle de machines-outils et de chaîne
d'assemblage, robotique,...)
· Télécommunications
(satellites, téléphonie et vidéo mobiles,
réseaux Wan, routeurs...)
· Sécurité (e-commerce,
cartes à puce, authentification...)
· Santé (équipement,
hospitalisation à domicile, appareils implantés,
prothèses)
· Développement durable
(éolienne, éclairage public, chauffage...)
· Jouets et autres produits grands
publics,...
I.5. ARCHITECTURE DES APPLICATIONS TEMPS REEL ET
EMBARQUE
Il y a deux façons de construire un système
temps réel et embarqué. Cela implique directement des
architectures différentes pour les développements de leurs
applications selon le type de système temps réel et
embarqué à utiliser.
Nous pouvons construire un système temps réel et
embarqué comme étant un :
? Un générateur cyclique : c'est une approche
qui est dite mono tâche car il conduit à la réalisation
d'un programme unique dont la structure générale est une boucle
sans fin. Les capteurs captent périodiquement la dynamique du
procédé par l'échantillonnage, effectuent les calculs et
envoient les commandes aux actionneurs.
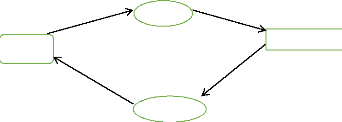
Procédé
contrôlé
Application
Capteur
Actionneur
Figure I. 2Architecture d'un système temps
réel-embarqué mono tâches
9
? Un système réactif : c'est un système
multitâche qui fonctionne suite aux sollicitations de
procédé donc le système sera asynchrone.
A cause de certains besoins, nous pouvons aussi
développer un système de type hybride qui renferme les deux types
d'architecture. Dans ce, le système sera asynchrone et synchrone. Ce qui
donnera une approche multitâche dont les séquences de traitement
se dérouleront en parallèle.
I.5.1. Architecture mono tâche
Un système temps réel à une seule
tâche (mono tâche) est simple à définir, il suffit de
répéter indéfiniment la suite des tâches en
attendant un stimulus et cela par la sollicitation d'un procédé
afin d'agir en fonction du stimulus, c`est à dire réagir
après sollicitation du système.
On utilise un timer pour fixer la
périodicité à laquelle un programme sera
exécuté ou le signal va être lancé en provenance du
capteur.
Lors de l'exécution de la boucle en se
référant à un timer, le programme en question qui contient
la boucle est constitué d'un programme principal et de deux ensembles de
procédures qui sont, entre autres, les procédures de gestion des
entrée/sortie et les procédures de traitement d'un ensemble de
gestion des interruptions.
Le programme principal joue le rôle de séquenceur
rudimentaire qui enchaine l'exécution des différentes
procédures en fonctions de stimulus externes ou systématiquement
à chaque tour de la boucle. Lors de l'exécution du programme
principal, il est intéressant d'avoir un tableau d'adresses qui permet
de classer les exécutions selon un ordre déterminé.
Ce genre de système interagit avec son environnement,
soit par une interruption, soit par une scrutation cyclique ou carrément
en faisant la combinaison des deux.
Ces interruptions sont classées par leur cause et leur
arrivée c'est ainsi qu'on a les interruptions des entrée/sortie,
de page mémoire...
Principe de l'interruption : lors de l'arrivée
d'une interruption, le programme en cours d'exécution sera interrompu
à la fin de l'instruction machine en cours d'exécution et une
fois l'interruption finie le programme retrouvera son exécution normale
; l'état de la machine est sauvegardé dans une pile pour
mieux permettre la reprise après l'interruption.
I.5.1.1. Inconvénients de l'architecture mono
tâche
Ce genre de système pose un sérieux
problème d'extensibilité, comme nous faisons l'exécution
d'une application ayant une seule tâche, nous ne pouvons pas faire
évoluer une telle architecture car en faisant étendre une telle
architecture nous ne serons plus en mesure de faire tourner une application
mono tâche. Elle risquera même de produire des résultats
erronés. Or, un tel résultat pour un système temps
réel et embarqué aura des conséquences.
T.F.E 2015 | Benito Lubuma L2 Génie info
T.F.E 2015 | Benito Lubuma L2 Génie info
10
| 

