4. METODOLOGIA DA PESQUISA
Para a realização desse trabalho teve-se a
necessidade de uma base teórica acerca do tema, por meio da
elaboração de uma revisão bibliográfica, com base
em pesquisas feitas em portais de informação, artigos
acadêmicos (revistas, teses, livros), dados coletados em entrevistas
orais com professores da Unilins, pesquisas de campo. Em harmonia com essa
fundamentação, será feita a análise dos dados e
elaborado o projeto: «ACIONAMENTO DE MOTORES DE INDUÇO
ATRAVÉS DE INVERSORES DE FREQUÊNCIA» aqui proposto
como solução para o problema apresentado.
16
5. MOTOR DE INDUÇO
O motor de indução foi, de forma apropriada,
patenteado primeiramente por Nikola Tesla em 1888. Esses motores têm sido
usados em larga escala nas indústrias devido a sua confiabilidade,
simplicidade e eficiência.
Os motores de indução são assim chamados
porque apenas o estator é alimentado com energia elétrica e o
rotor recebe energia através da indução
eletromagnética. Os motores de indução são motores
de corrente alternada que podem ser divididos tanto quando número de
fases quanto ao modo de enrolamento do rotor.
As máquinas rotativas de corrente alternada dividem-se
em dois grandes grupos: Máquinas Síncronas e
Máquinas Assíncronas.
Uma máquina diz-se síncrona quando roda à
velocidade de síncronismo, isto é, à velocidade que
resulta da aplicação da expressão:
Onde f, frequência da tensão de
alimentação e p, número de pares de pólos da
máquina.
Uma máquina diz-se assíncrona quando roda a uma
velocidade diferente da velocidade de síncronismo.
Para este trabalho foi escolhido o tipo de motor
assíncrono trifásico também chamado de motor de
indução trifásico com rotor de gaiola. Este rotor se torna
mais viável se considerar as aplicações de baixa
potência, que é o foco deste trabalho. A
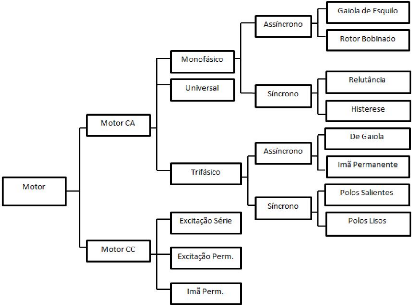
Figura 1 - Mostra como os motores elétricos podem ser
divididos. (Fonte: VAZ, 2010)
Na Figura 2 é possível identificar os principais
elementos que constituem um motor de indução, e como eles
são conectados em sua montagem.
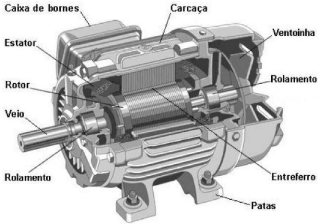
Figura 2 - Motor de indução. 17
18
Abaixo segue uma pequena descrição de cada parte de
um motor de indução:
· Estator: Parte fixa da
máquina, é constituído por chapas ferromagnéticas
empilhadas e isoladas entre si. As chapas possuem pequenas cavidades nas quais
são colocados enrolamentos de fios de cobre que são alimentados
pela rede elétrica.
· Rotor : Parte móvel do motor,
é constituído por um núcleo ferromagnético, que
pode ser um conjunto de enrolamento (motor de rotor bobinado) ou um conjunto de
condutores paralelos (motor de rotor em curto circuito ou também chamado
de rotor emgaiola de esquilo).
· Veio: Também conhecido como
eixo, faz parte do rotor e é o responsável por fornecer energia
mecânica a uma determinada aplicação.
· Rolamentos: São utilizados
para fazer o contato entre as partes girantes e fixas do motor.
· Patas: São usadas para a
fixação do motor.
· Caixa de bornes: Nesta caixa é
feita a ligação elétrica do motor com a rede.
· Entreferro: É um pequeno
espaçamento entre o rotor e o estator. Quanto menor for esse
espaçamento melhor será o fluxo magnético entre o rotor e
o estator.
· Ventoinha: Tem a função de
refrigeração do estator e do rotor.
· Carcaça: A carcaça acopla
o estator e serve de proteção contra o meio externo.
19
5.1. Parâmetros do motor de indução
trifásico
Para o entendimento do funcionamento e para o projeto de
sistemas controladores dessas máquinas, alguns parâmetros
são de extrema importância. Os parâmetros listados abaixo
proporcionam um entendimento básico sobre os motores de
indução trifásicos.
. Velocidade Síncrona (????): É a velocidade do
campo magnético girante.
Não é a velocidade
mecânica do motor, mas sim a velocidade do fluxo magnético gerado
pelo enrolamento do estator.
Ela é dada pela Equação (1):
120??
????= (1')
??
Onde:
ns --* velocidade síncrona ou velocidade do campo
magnético girante, (rpm); f --* freqüência da corrente do
estator ou freqüência da rede (alimentação), Hz; p --*
número total de pólos.
. Velocidade Mecânica (????) : É a velocidade no
eixo do motor ou
velocidade de funcionamento do motor e é dada pela
Equação 2
????= (1 - ??)???? (2)
Onde S é o escorregamento e pode ser calculado pela
Equação 3.
???? - ????
??(%) = * 100 (3)
????
Onde:
S(%) --* escorregamento percentual, %;
????--* velocidade síncrona (ou velocidade do campo
girante), rpm;
????--* velocidade de funcionamento do motor (ou velocidade do
rotor), rpm.
. Fluxo magnético (????) : É o fluxo que gera a
indução magnética no
motor de indução. Este fluxo é proporcional
à tensão aplicada no estator e inversamente proporcional à
frequência aplicada, como mostrado na equação 4. ??
???? ? (4)
??
20
Onde:
????? fluxo magnético, Wb;
V ? tensão aplicada no estator, V.
? Torque (T): é um esforço de torção,
ou torcional, produzido pelo motor.
O Torque do motor é proporcional
ao produto da corrente no rotor e do fluxo
magnético.
T ? IR.öm (5)
Sendo:
T: torque do motor (N.m);
IR: corrente no rotor (A);
öm: fluxo de magnetização (Wb).
O torque pode ser positivo ou negativo, dependendo da
direção de rotação.
? Potência (P): a potência de saída é
proporcional ao produto do torque e da velocidade ????.
??? ??.???? (6)
Sendo:
P: potência mecânica (W)
T: torque (N.m)
????: velocidade do rotor (rpm)
| 

