|
Academic Year 2021/2022

|
People's Republic of Algeria Ministry of
Higher
Education
and Scientific Research
Universite Hassiba Benbouali de
Chlef
|
|
Faculty: Exact Sciences and Computer
Science
Department: Computer Science
THESIS FOR OBTAINING BACHELOR'S DEGREE IN
COMPUTER
SCIENCE
presented by :
Chaki Ilyas
Souna Abdelazize
Image to Image Translation with Generative
Adversarial Networks. (Translation of
Satellite Images to Google Maps Images.)
Defended on 12/06/2022 before the jury:
Mr. Ahmed Abbache Supervisor
President Examiner
Contents
|
introduction
1 Artificial Intelligence
1.1 Machine Learning
|
vii
1
1
|
|
|
1.1.1 What is learning
|
1
|
|
|
1.1.2 Categories of learning
|
2
|
|
|
1.1.3 Limitations
|
2
|
|
|
1.1.4 Deep Learning
|
2
|
|
|
1.1.4.1 Deep Neural Concepts
|
4
|
|
|
1.1.4.2 Deep neural networks
|
4
|
|
|
1.1.4.3 Error functions
|
5
|
|
|
1.1.4.4 Optimization algorithms:
|
6
|
|
|
1.1.4.5 Deep Neural Network Variants
|
7
|
|
1.2
|
Natural Language Processing
|
9
|
|
|
1.2.1 What is Language?
|
9
|
|
|
1.2.2 Why Natural Language Processing?
|
9
|
|
|
1.2.2.1 Communication
|
10
|
|
1.3
|
Computer Vision
|
10
|
|
|
1.3.1 what is computer vision
|
10
|
|
|
1.3.2 Convolution neural network(CNN)
|
10
|
|
|
1.3.2.1 CNN's concepts .
|
12
|
|
1.4
|
Knowledge Representation
|
12
|
|
1.5
|
automated reasoning
|
13
|
|
1.6
|
robotics
|
13
|
|
|
1.6.1 Aspects of robotics .
|
13
|
|
1.7
|
Conclusion
|
13
|
|
2
|
Generative Modeling
|
14
|
|
2.1
|
Representation Learning
|
14
|
|
|
2.1.0.1 Supervised Representational Learning
|
14
|
|
|
2.1.0.2 Unsupervised Representational Learning
|
15
|
ii
|
|
CONTENTS
|
|
2.2
2.3
|
What is generative Modelling
2.2.1 Generative Models
2.2.1.1 AutoEncoders
2.2.1.2 Variational AutoEncoders
Generative Adversarial Networks
|
15
16
16
17
18
|
|
|
2.3.1 What are Generative Adversarial Networks
|
18
|
|
|
2.3.2 Generative Adversarial Network model
|
18
|
|
|
2.3.2.1 The Generator Model
|
19
|
|
|
2.3.2.2 The Discriminator Model
|
19
|
|
|
2.3.3 Generative Adversarial Network Architectures
|
19
|
|
3
|
The Pix2Pix Model
|
21
|
|
3.1
|
Image to Image Translation
|
21
|
|
|
3.1.1 Pix2pix model
|
22
|
|
3.2
|
The U-net Model
|
23
|
|
|
3.2.1 The Unet-Generator Model
|
23
|
|
|
3.2.2 The Markovian Discriminator
|
24
|
|
|
3.2.3 The Model Loss Function
|
24
|
|
3.3
|
Conclusion
|
25
|
|
4
|
Project Implementation
|
26
|
|
4.1
|
Tooling
|
26
|
|
4.2
|
Conception
|
28
|
|
4.3
|
The Maps Dataset
|
28
|
|
4.4
|
Generator Implementation
|
29
|
|
4.5
|
Discriminator Implementation
|
30
|
|
4.6
|
Pix2Pix Implementation
|
31
|
|
4.7
|
Model Training
|
31
|
|
4.8
|
Model Evaluation
|
32
|
|
4.9
|
Conclusion
|
32
|
Listings
|
4.1
|
encoder_block
|
29
|
|
4.2
|
decoder_block
|
29
|
|
4.3
|
generator
|
29
|
|
4.4
|
encoder_block
|
30
|
|
4.5
|
decoder_block
|
31
|
|
4.6
|
decoder_block
|
31
|
List of Figures
1.1 neuron / Source[26] 3
1.2 artificial neuron / Source[18] 3
1.3 artificial neural network / Source[2] 3
1.4 feed forward neural network / Source[14] 7
1.5 radial basis neural network [20] 8
1.6 modular neural network / Source[19] 8
1.7 recurrent neural network / Source [3] 9
1.8 computer vision architecture / Source[7] 10
1.9 convolution operation / Source [15] 11
2.1 generative modeling in the landscape of artificial
intelligence / Source[1] 15
2.2 AutoEncoder architecture / Source[21] 16
2.3 variational distribution / Source[22] 17
2.4 fake faces generated using cycle GAN / Source [25] 18
2.5 basic GAN architecture / Source[1] 19
2.6 conditional gan architecture / Source [1] 20
3.1 style transfer / Source [25] 22
3.2 unet / Source[1] 23
3.3 Markovian discriminator / Source [1] 24
4.1 python logo / Source[27] 27
4.2 keras logo / Source[11] 27
4.3 Tensor Flow logo / Source[4] 28
4.4 Tkinter symbol /Source [5] 28
4.5 Examples from the data set 29
List of Tables
|
1.1
|
Types of learning
|
2
|
|
1.2
|
Deep Learning Concepts
|
4
|
|
1.3
|
Activation Functions
|
5
|
|
1.4
|
error Functions
|
6
|
|
1.5
|
optimization algorithms
|
7
|
|
1.6
|
Deep Learning Concepts
|
12
|
acknowledgement
We would love to take this part to show appreciation for everyone
who helped directly or indirectly in making this project. First i will start
with Vincent Kasozi who first inspired us.
i would love to thank him for being our guide and a good
friend
Thanks to Mr.Ahmed Abbache for the opportunity he gave us and for
being extremely patient with the process.
Thanks to Souna Abdelazize for accepting the risky offer of
taking this project even when we knew so little about the domain. Thanks to the
author/creator of every resource that i've used ,the contributions
you'll make is appreciated
I'm trying to make this list as short as possible so i will give
a quick acknowledgement to Douba abdrezzak,Otmani Sadiq,Oueldja Mohammed amine
for helping with the web part.
introduction
The desire to create is one of the deepest yearnings of the human
soul.
Dleter F.Uchtdorf
Mapping technology is one one of the most used technologies in
the last couple years ,with the ever growing need for localisation and
navigation, there are still weak mapping in certain parts of the world this may
require creating efficient maps for various future applications, this will
require new efficient and fast way of generating good maps ,the manual process
of collecting data and using it for making maps can be costful,Google Maps
works with 1,000 third party sources from around the world to collect the data
necessary to create accurate maps. in this project we will introduce a solution
for automating this process using an advanced deep learning architecture.
Artificial intelligence is a
vast field regrouping the humanity quest for replicating and
surpassing our intelligence, ever since the first imagination of artificial
intelligent entities we came a long way. one of the most impressing qualities
of humans is our creativity , this led to a desperate search for a way of
creating efficient generative models . In this project we will go through the
implementation of a Satellite to map
image translator this style transfer is considered as a
generative task ,this will lead to using Generative adversarial networks(GANs),
in the first chapter we will introduce the domain of artificial intelligence
,and talk briefly about machine learning and deep learning ,next in the second
chapter we will talk about generative modeling as leading to generative
adversarial networks and a particular GAN named pix2pix will be used ,in the
last chapter we will go through the code implementation.

1
Artificial Intelligence
Introduction
h Machine Learning
h Natural Language Processing h Computer
Vision
h Knowledge Representation h Automated Reasoning
h Robotics
The Turing test, proposed by Alan Turing (1950), was designed
as a thought experiment that would sidestep the philosophical vagueness of the
question «Can a machine think?» A computer passes the test if a human
interrogator, after posing some written questions, cannot tell whether the
written responses come from a person or from a computer.
1.1 Machine Learning
For the last two decades Machine Learning became one of main
fields in computer science due to the ever growing computing power ,and the
availability of more and more data ,the need to a smart way of data
analysis.

Definition 1.1
the development of computer systems able to learn using
algorithms and statistical models to analyze and draw inferences in data.
[23]
?
1.1.1 What is learning
Learning is the process of gaining knowledge or skill.
2
1.1 Machine Learning

Definition 1.2
?
Learning is the performance's improvement in a particular
task with respect to experiance.
1.1.2 Categories of learning
There are three main types of machine learning:
Index Task Explanation
|
1 Supervised
Learning
|
it consists of an outcome predicted from a given set of
independent variables,we us these variables to create a function that best fit
the given
data ,we keep on modifying the function until it reaches the
desired.
Hierarchical clustering
K-means clustering [10]
|
|
2 Unsupervised
Learning
|
in this algorithm there is no outcome ,it is used for
clustering data based. Examples for unsupervised learning :apriori
algorithm,k-means etc
Reinforcement Learning: the machine is trained to make a
certain decision by being exposed to the environment and learn from past
experiences [10].
|
|
3 Reinforcement
Learning
|
In reinforcement learning, an agent interacts with its
environment and periodically receives awards that reflect how well it is doing
at its task. Reinforcement learning is distinct from "just solving a Markov
decision process (MDP)" since the MDP is not presented to the agent as a
problem to solve; the agent is in the MDP. It does not know the model of
transformation or the reward mechanism, and to learn more [10].
|
Table 1.1: Types of learning
1.1.3 Limitations
Machine learning is notorious for it'difficult features
extraction part, in machine learning that'usually done by the designer ,another
limitation would be the inability to create complex patterns for complex data
patterns,deep learning solve this two fatal flaws.
1.1.4 Deep Learning
Inspired by how the human brain works, tried to reverse engineer
the neurons 1.1 in our central nervous system led to the creation of artificial
neuron 1.2 ,stacking this neurons together allows the mapping of more complex
data also called Artificial Neural networks (ANN) [8] 1.3.
1.1 Machine Learning
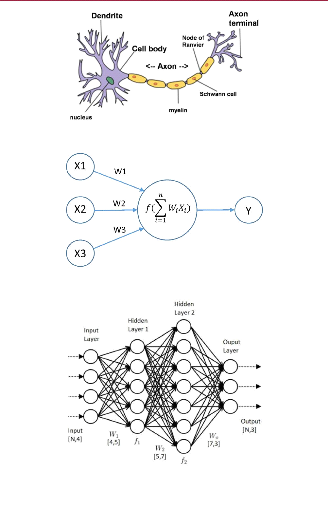
Figure 1.1: neuron / Source[26]
Figure 1.2: artificial neuron / Source[18]
Figure 1.3: artificial neural network /
Source[2]
3
4
1.1 Machine Learning
as illustrated in the figure 1.2 there is a main processing
part named neuron that takes an input X1,X2,X3...Xn do a processing and fires
an output Y ,this is similar to what happens inside our brains. stacking this
neurons together forms a network that we can divide into three main parts:
1.1.4.1 Deep Neural Concepts
Index Concept Explanation
1 Activation Function also known as transfer learning,a function
that takes the weighted sum
and produced on outcome based on the nature of the function [8]:
linear activation function
non linear activation function
2 Error functions a function used for the task of evaluating the
network performance ,a
measure of how wrong the network is [8].
3 Optimization in the learning process optimization algorithms
are used to minimize
algorithms the error by finding the optimal weights.
4 Batch a way of making networks faster by re-scaling the data
,giving a mean
Normalization of zero and a standard deviation of one [8].
5 Dropout turning off a percentage of the neurons that make up
certain layers during
a particular forward or backward pass, it is used to prevent
over-fitting [8].
Table 1.2: Deep Learning Concepts
1.1.4.2 Deep neural networks
Deep neural networks or Artificial neural network (ANN) can be
divided into three main parts: The input layer:we feed the attribute to the
nodes of the first layer.
The hidden layer :each node in the hidden layer takes it's
input from the previous layer which is the weighted sum of the outputs of the
previous layer given by the expression:
n
X WiXi (1.1)
i=1
the neuron apply a function of the weighted sum ,this function
is called the activation function 1.3:
f(
Xn i=1
WiXi) (1.2)
The output layer:the nodes of the output layer takes the input
from the last hidden layer and apply it's own activation function
Definition 1.3
it is a measure of how accurate the prediction is compared
to the correct solution,the lower the error the better the performance.
[8]
?
5
|
|
1.1 Machine Learning
|
|
|
|
|
|
Index
|
Concept
|
Explanation
|
|
|
1
|
sigmoid function
|
1
f(x)
=
|
(1.3)
|
|
1 + e-x
|
|
2
|
ReLU
|
f(x) = max(0,x)
|
(1.4)
|
|
3
|
Leaky ReLU
|
f(x) = max(0.1x, x)
|
(1.5)
|
|
4
|
Softmax
|
exp(Zi)
|
(1.6)
|
|
softmax(Zi) = P
j exp(Zj)
|
|
5
|
Hyperbolic Tangent (Tanh)
|
(ex - e-x)
|
(1.7)
|
|
f(x) =
(ex + e-x)
|
Table 1.3: Activation Functions
· Note the process of calculating the
output of every layer and passing it to the next layer is called
Feed-Forward and it boils down to matrices
multiplication.
1.1.4.3 Error functions

Error functions 1.4 is a measure of how far a prediction is from
the right answer.
6
|
|
1.1 Machine Learning
|
|
|
|
|
|
Index
|
Concept
|
|
Explanation
|
|
1
|
Mean
error(MSE)
|
square
|
it takes the average of the squared sum of all the errors:
1
E(W, b) (ày -
= XN
yi)2
|
(1.8)
|
|
|
Mean
error(MSE)
|
absolute
|
it takes the average of the absolute valeu of the sum of all
the
1
E(W,b) |(ày -
=
XN
|
errors:
(1.9)
|
|
|
Binary entropy:
|
cross-
|
it is mostly used in classification problems:
E(W,b) = - Xm
yilog(pi)
i=1
|
(1.10)
|
|
Table 1.4: error Functions
1.1.4.4 Optimization algorithms:
in order to improve the performance of the network we need to
minimize the error and find the optimal weights ,this process of framing a
problem and trying to minimize a value is called optimization.

Definition 1.4
optimization algorithms are a group of algorithms that
use mathematical tools in order to optimize weights and reach optimal
performance in neural networks. [8]
?
these are examples for optimiztion algorithms 1.5
7
1.1 Machine Learning
Index Concept Explanation
1 Batch gradient in this algorithm we use batchs of data to
update the weights iteratively
descent(BGD): in order to descent the slope of the curve until
we reach the minimal
error.
dE
LWi = -á (1.11)
dWi
Wnext-step = Wcurrent + L (1.12)
2 Stochastic gradient stochastic is just a fancy way to say
random, this algorithm uses random
descent SGD): instances of the data instead of the entire batch
,this gives it the advantage
of being faster than BGD,it is vastly used in
deep networks.
Table 1.5: optimization algorithms
1.1.4.5 Deep Neural Network Variants
Feed-forward neural networks: it is the most basic form of
neural networks where the flow only occurs from the input layer, they only have
one layer ,or at most one hidden layer,in this architecture there is no
back-propagation technique,they are usually used in face recognition
applications1.4
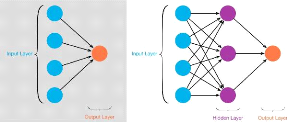
Figure 1.4: feed forward neural network /
Source[14]
Radial basis function neural networks: this networks have
preferably two layers,the relative
distance from any point to the center is calculated and the same
is passed to the next layer 1.5
8
1.1 Machine Learning
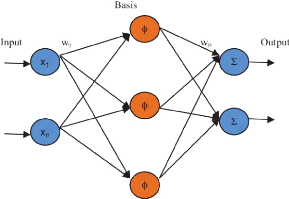
Figure 1.5: radial basis neural network
[20]
Multi layer perceptron(MLP): these networks usually have more
than three layers with fully connected nodes this architecture is usually used
for classifying data and speech recognition and various other applications
1.3
Modular neural networks: this architecture is a combination
of smaller networks that serve to achieve a common target ,which is very
helpful in breaking a big problem into small pieces 1.6
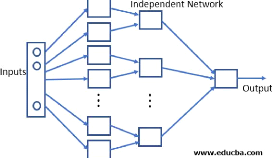
Figure 1.6: modular neural network /
Source[19]
Recurrent Neural Network: This architecture is unique for
it's use of loops where the output of one neuron is fed back to the same neuron
as an input allows the predicting of the output and the creation of small state
memory which is useful for video and audio applications 1.7
1.2 Natural Language Processing
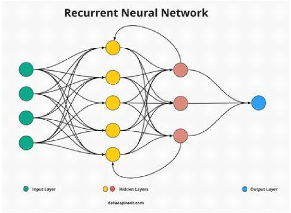
Figure 1.7: recurrent neural network / Source
[3]
1.2 Natural Language Processing
Natural language processing (NLP) is a sub-field of
linguistics, computer science, and artificial intelligence concerned with the
interactions between computers and human language, in particular how to program
computers to process and analyze large amounts of natural language data. The
goal is a computer capable of "understanding" the contents of documents,
including the contextual nuances of the language within them.
Definition 1.5
4

1.2.1 What is Language?
Noam Chomsky gives the following definition to languages:
Definition 1.6
language is the inherent capability of native speakers to
understand and form grammatical sentences. A language is a set of (finite or
infinite) sentences, each finite length constructed out of a limited set of
elements. This definition of language considers sentences as the basis of a
language. -Noam Chomsky-
4
9
1.2.2 Why Natural Language Processing?
Natural language processing helps computers communicate with
humans in their natural language,NLP makes it possible for computers to read
text, hear speech and interpret it.
10
1.3 Computer Vision
1.2.2.1 Communication
communication can be defined as the act of interaction between
two entities , in the context of Natural Language processing it's the
interaction between humans and machines
1.3 Computer Vision
1.3.1 what is computer vision
inspired by the architecture of the vision systems in humans and
animals ,we create computer vision by using a sensing device and a interpreting
device as illustrated in figure 1.8 in the scope of

Figure 1.8: computer vision architecture /
Source[7] this project we will focus on the interpreting part.
· Note traditional Multi layer
perceptron network have are fully connected ,means each node is connected to
every and each neuron in the next and previous layer with can lead to an
explosion in the number of weights when the number offeatures is height ,this
will be a problem when we apply it on computer vision. each pixel in an image
will be a feature ,in an grey scale 256*256 image will produce 65,536 feature
meaning millions of weights ,this will only increase exponentially when we add
RGB images with more dimensions,for this exact purpose we use Convolution
neural network(CNN).
1.3.2 Convolution neural network(CNN)

in mathematics convolution is the operation of two
function to produce a third function, in CONV we multiply each pixel in the
image with the corresponding weight in the conv matrix illustrated in figure
1.9 :
weighted - sum = X1W1 + X2W2 + X3W3
+ ....XnWn + b (1.13)
Theorem 1.1
?
Definition 1.7
an architecture in deep learning composed offour parts:
Input layer
Convolution layer

1.3 Computer Vision
|
Figure 1.9: convolution operation / Source
[15]
|
Fully connected layer Output layer
illustrated in figure1.9 [8] 4
|
|
Definition 1.8
a Convolution layer(Conv) is a group of matrix that slide
over the image to extract features using convolution. [8]
4
11
the task of classification with CNN runs through a pipeline of
two main steps:

Feature extraction: it is done by the convolutional layer ,in
this phase the network takes all the necessary information out of the image
,and removing the unnecessary complexities. Classification: this phase is
usually done by MLP with a sigmoid function at the output layer,it takes the
extracted features out of the convolutional layer and output a probability.
· Note CNN architecture is very useful
when it comes to conserving the spatial features,also getting rid of the
unnecessary informations.

1.4 Knowledge Representation
1.3.2.1 CNN's concepts:
Index Concept Explanation
1 stride Stride is a component of convolutional neural networks,
or neural
networks tuned for the compression of images and video data.
Stride is a parameter of the neural network's filter that modifies the amount
of movement over the image or video. For example, if a neural network's stride
is set to 1, the filter will move one pixel, or unit, at a time. The size of
the filter affects the encoded output volume, so stride is often set to a whole
integer, rather than a fraction or decimal.[13]
2 pooling Pooling layers provide an approach to down sampling
feature maps by
summarizing the presence of features in patches of the
feature map. Two common pooling methods are average pooling and max pooling
that summarize the average presence of a feature and the most activated
presence of a feature respectively.[13]
3 kernel as mentioned before ,convolutional operation is done by
a group of
matrix ,kernel is just a fancy name for matrix ,the values of
the kernel are initialized randomly than we adjust them with
back-propagation.[13]
4 Batch Batch normalization is a technique for training very
deep neural
Normalization networks that standardizes the inputs to a
layer for each mini-
batch. This has the effect of stabilizing the learning
process and dramatically reducing the number of training epochs required to
train deep networks.[13]
5 Dropout Dropout is a technique that drops neurons from the
neural network or
`ignores' them during training, in other words, different
neurons are removed from the network on a temporary basis.[13]
Table 1.6: Deep Learning Concepts
1.4 Knowledge Representation
Definition 1.9
Knowledge-representation is afield of artificial
intelligence that focuses on designing computer representations that capture
information about the world that can be used for solving complex
problems
?
12
semantic nets systems architecture
13
1.5 automated reasoning
frames
rules
ontologies
1.5 automated reasoning
·

Definition 1.10
Automated reasoning is the area ofcomputer science that
is apply logical reasoning in computing systems. If given a set of assumptions
and a goal, an automated reasoning system would be able to make logical
inferences towards that goal automatically.
4
Note Automated reasoning is considered to
be a sub-field ofartificial intelligence (AI). yet the methods and
implementation of both are unique enough. For example, AI typically uses a type
logic called modal logic, which uses classical logic while also expressing
modality (possibilities or impossibilities). The phrase AI also has
connotations denoting a computer which works like a person, which opposes how
automated reasoning works.
1.6 robotics

Definition 1.11
Robotics is a branch of AI, composed of Computer
Science,Electrical Engineering, and Mechanical Engineering,used for
designing,building , and application of intelligent robots [16].
4
1.6.1 Aspects of robotics:
Robots have mechanical construction, form, or shape designed
to accomplish the task designed for.
Robots have electrical components which have the role of
powering and controlling the machinery. They contain some level of computer
program that determines what, when and how a robot does something.
1.7 Conclusion
in this chapter we introduced some of the concepts and tools
to use in this project,we will use CNN as a discriminator for the final
model,expanding on this ideas was necessary in the process of creating an
understanding of why artificial intelligence and why CNN exactly,next we will
bring up the Generative adversarial network,and try to give an intuition of how
it works.

2
Generative Modeling
Introduction
h Representational Learning
h Generative Models Taxonomy
h Generative Adversarial Networks
h GAN Training
h Applications of GANs h Conclusion
2.1 Representation Learning
In representation learning, data is sent into the machine,
and it learns the representation on its own. It is a way of determining a data
representation of the features, the distance function, and the similarity
function that determines how the predictive model will perform. Representation
learning works by reducing high-dimensional data to low-dimensional data,
making it easier to discover patterns and anomalies while also providing a
better understanding of the data's overall behaviour.

Representation learning is a class of machine learning
approaches that allow a system to discover the representations required for
feature detection or classification from raw data. The requirement for manual
feature engineering is reduced by allowing a machine to learn the features and
apply them to a given activity.[1]
Definition 2.1
?
2.1.0.1 Supervised Representational Learning
Supervised Dictionary Learning
2.2 What is generative Modelling
Multi-Layer Perceptron Neural Networks
2.1.0.2 Unsupervised Representational Learning
Learning Representation from unlabeled data is referred to as
unsupervised feature learning. Unsupervised Representation learning frequently
seeks to uncover low-dimensional features that encapsulate some structure
beneath the high-dimensional input data.
2.2 What is generative Modelling
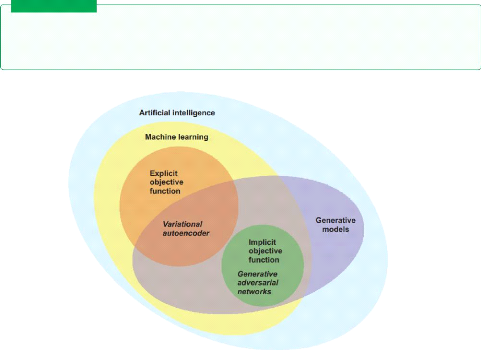
By definition generative modeling is an unsupervised
learning task in machine learning that involves automatically discovering and
learning the representations or patterns in input data in such a way that the
model can be used to generate new examples. [6]
Definition 2.2
?
15
Figure 2.1: generative modeling in the
landscape of artificial intelligence / Source[1]
Example 2.1 let's say we want to create
realistic looking images of cats, first we will need a dataset containing
images of cats ,we call it training data ,we use it to teach our model the
rules that govern the appearance of a cat ,the target will be for our model to
generate a realistic samples that has never existed before yet still looks
real.
· Note The generative model must be
probabilistic rather than deterministic ,it can't be simply a fixed calculation
like taking the average of all the pixels in the dataset,doing this will
produce a deterministic
16
2.2 What is generative Modelling
model which means it's gonna produce the same output
every time,the model must have an element of randomness (not generating the
same image).
2.2.1 Generative Models
Generative models are deep learning networks with the task of
generating data. All these models represent probability distributions over
multiple variables in some manner. The distributions that the generative model
generates are high-dimensional. For example, in the classical deep learning
methodology like classification and regression, we model a one-dimensional
output, whereas in generative modelling we model high-dimensional output.
We describe some of the traditional generative networks:
2.2.1.1 AutoEncoders
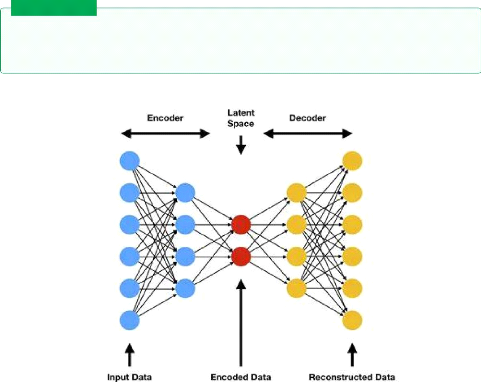
AutoEncoders are a deep learning model usedfor learning a
valid representations of unlabeled data ,it is adjusted by trying to regenerate
the input data from the encoding [12]. AutoEncoders are composed of two sub
models.
Definition 2.3
?
Figure 2.2: AutoEncoder architecture /
Source[21]
Encoder takes the data and try to learn a valid simpler
representation, in vision tasks it takes an image x fed as a vector of size y
and outputs a latent vector with the size z ,from a theory
17
2.3 Generative Adversarial Networks
of information perspective we are trying to find a smaller
representation without any loss in the information.
Latent vector(z): it is a smaller representation of the data.
Decoder: takes the latent vector with the size z and output
the image x* ,we thrive to make the image x* identical to x.
ïNote The training process
ofAutoEncoders is done through one general loss function,in contrast this would
no be the case in other architectures we are gonna bring up in the next
section.
2.2.1.2 Variational AutoEncoders
The difference between a regular AutoEncoder and a
variational AutoEncoder has to do with the latent representation.
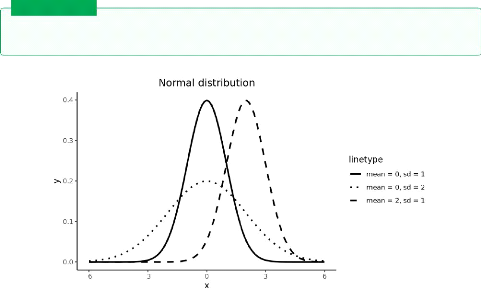
A variational AutoEncoder is a type ofAutoEncoder where
the latent vector is represented as a distribution 2.3 with a learned mean and
a standard deviation [12]
Definition 2.4
?
Figure 2.3: variational distribution /
Source[22]
In the training process of a regular AutoEncoder we learn the
values of that vector where as in variational AutoEncoder we need to further
learn the parameters of that distribution, this implies that in the decoding
process we need to sample from that distribution which means the result will
look like the data we fed into the encoder. [12].
· Note The difference for the
generating process comesfrom the nature ofthe latent space representation ,in
the variational AutoEncoder we get an output that looks something like an
example from the dataset,in contrast a regular AutoEncoder the output will be
similar to the example we fed.
18
2.3 Generative Adversarial Networks
2.3 Generative Adversarial Networks
Generative adversarial network is a new architecture ,first
introduced in 2014 by Ian Goodfellow et al at the International Conference on
Neural Information Processing Systems (NIPS 2014). Like any new technology
there is no good theories on how to implement the model, yet it achieves
remarkable results,in 2019 Nvidia released a realistic fake face images 2.4
,indistinguishable from real faces using an advanced GAN architecture called
Cycle GANs.

Figure 2.4: fake faces generated using cycle
GAN / Source [25]
2.3.1 What are Generative Adversarial
Networks
Generative adversarial networks or GANs for short is an
approach of generative modeling using deep learning ,it's a way offraming an
unsupervised problem of generating data into a supervised problem using two
models working together,a generator with the target of generating plausible
fake data and the discriminator with the target of classifying fake and real
data ,this two sub networks are trained together in an adversarial frame ,in a
zero sum game ,where the win of one sub-model is a loss to the other 2.5.
[1]
Definition 2.5
?
2.3.2 Generative Adversarial Network model
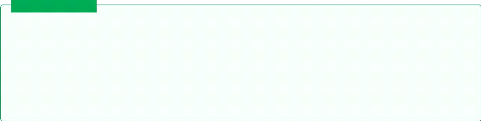
In a basic GAN architecture the generator takes a random
noise vector which is just a vector of random numbers in order to introduce
some randomness into the generation process ,the generated is next fed to the
discriminator along with a real image from the data set. the training process
happens on two cycles ,one for the discriminator and one for the generator
19
2.3 Generative Adversarial Networks
2.3.2.1 The Generator Model
for the generator: in order to train the generator we would need
to combine the two models ,the generator generates the image ,the discriminator
must classify it as fake ,if so ,it updates the generator
weights in the target of creating fake samples indistinguishable
from the samples in the data set.
2.3.2.2 The Discriminator Model
the discriminator takes an image from the data set with label 1
with the target of classifying as real,if the discriminator fails it updates
the weights.
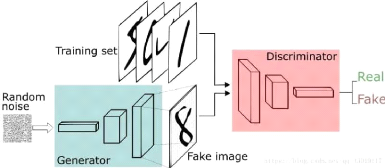
Figure 2.5: basic GAN architecture /
Source[1]
· Note GANs differfrom traditional
neural networks, in a traditional neural networks there is usually one cost
function represented in terms of it's own parameters J(e) ,in contrast in GANs
we have two cost functions one for the generator,the otherfor the discriminator
,each of these functions are represented in terms of both the networks's
parameters, J(G)(e(G), e(D)) for the generator
and J(D)(e(G), e(D)) for the discriminator.
the other difference is that traditional neural networks update all the
parameters e in the training cycle ,in a GANs there a training cycle for the
generator and another for the discriminator in each cycle each network updates
only it's weights that means the network updates only a part of what actually
makes it's loss.
2.3.3 Generative Adversarial Network Architectures
Even though GAN are a new technology the amount of research
that was put into it is huge ,that did lead to the birth of new advanced
architecture for various applications,here is a list for some of these
applications:
Vanilla GAN :
Deep convolutional GAN : since the Ian Goodfellow paper
,there have been a lot of attempts to fuse CNN as part of the GAN architecture
, the reason being CNNs are superior when it comes
20
2.3 Generative Adversarial Networks
to visual tasks , until Radford et al succeded in 2015 in their
paper Unsupervised representation learning with deep convolutional generative
adversarial networks [17], they used a CNN as both a generator and a
discriminator ,here are some guide lines into the implementation of DC-GAN:
strides are preferred over pooling layers in both the
generator and the discriminator. Batch normalization should be used in both the
generator and the discriminator.
For deep architectures ,fully connected layers should be
removed.
For the generator use ReLU activation function expect for the
last layer it's preferred to use Tanh rather than sigmoid ,the reason being
that images are normalized between (-1, 1) not (0,1).
Conditional GAN: it's a type of GAN introduced by Montreal
university student Mehdi Mirza and Flickr Al , where the the generator and the
discriminator are conditioned with an information,this information can be a
anything, a label,set of tags,a written description etc 2.6 .

Figure 2.6: conditional gan architecture /
Source [1]
· Note in the scope of the
explanation of the C-GAN,we will consider the auxiliary information to be a
label,just for simplicity.
Stack GAN: the translation of a text to a image is a
challenging task ,the GAN architecture built for this task is called Stack GAN
short for stacked generative adversarial networks ??
introduced is the paper StackGAN:Text to Photo realistic image
synthesis with stakced
generative adversarial networks,this network is composed of
two GANs stacked on top of each other ,each GAN has a specific role in the
creation of the image,the process can be described by the two stages bellow:
Stage 1:turn the text to a primitive sketch of the image
Stage 2: translating the sketch to a full realistic looking
image
Super Resolution GAN : the task of augmenting an image into a
high resolution image ?? is realized using an architecture
called SR-GAN short for super resolution generative adversarial networks
?? introduced in the paper photo-realistic single image
super-resolution using generative adversarial networks []

3
The Pix2Pix Model
Introduction
h Image to image Translation h The Unet
Model
h The Unet Generator Network
h The Markovian Discriminator h The Model Loss
Function h Conclusion
Definition 3.1
image to image translation is the controlled conversion
of an input image into a target image,image translation is a challenging task
that require a hand crafted lossfunction.[12]
?
3.1 Image to Image Translation

inspired by the language translation ,every scene can have
multiple representations such as grey scale,RGB, sketch etc the process of
translating an image into another domain is called style transfer 3.1
3.2 The U-net Model
Figure 3.1: style transfer / Source [25]
3.1.1 Pix2pix model
Definition 3.2
Pix2pix is GAN model designed for image to image
translation tasks,the architecture was proposed by Philip isola et al in their
2016 paper Image-to-image translation with conditional adversarial networks
[9],the pix2pix model is an implementation of the C-GAN where the generation of
the image is conditioned on a given image.
?
In the training process of Pix2pix model we give the
generator an image to condition the generation process. The output of the
generator is next fed to the discriminator along with the original image we fed
to the generator, next we provide the discriminator with a pair of real images(
original and target image) from the data set. The discriminator is suppose to
distinguish real pairs from fake pairs and the generator is suppose to fool the
discriminator hence the adversarial nature of the model.
· Note In a Pix2pix model exists
two loss functions,the adversarial loss and the L1 loss ,this way we don't only
force the generate to produce plausible images for the target domain ,but also
to generate images that are plausible as a transformation of the original
image.

L1 loss is the mean absolute difference between the
generated image and the expected image
Theorem 3.1
Xi= 1 i=n
|àyi - yi| (3.1)
?
22
23
3.2 The U-net Model
3.2 The U-net Model
First introduced by Philip isola et al in their paper
Image-to-image translation with conditional adversarial networks in 2016 [9]
,The U-net ?? is an implementation of the Pix2pix model where the generator in
a U-Net model and the discriminator is a Markovian discriminator also known as
a patch GAN ,this network proved superior performace on the image to image
translation tasks,
3.2.1 The Unet-Generator Model
U-Net is a model 3.2 first build for semantic segmentation.
It consists of a contracting path and an expansion path. The contracting path
is a typical architecture of a convolutional network. It consists of the
repeated application of two 3x3 convolutions, each followed by a ReLU and a 2x2
max pooling operation with stride 2 for downsampling. At each downsampling step
we double the number of feature channels. Every step in the expansive path
consists of an upsampling of the feature map followed by a 2x2 convolution that
halves the number of feature channels, a concatenation with the correspondingly
cropped feature map from the contracting path, and two 3x3 convolutions, each
followed by a ReLU. At the final layer a 1x1 convolution is used to map each
64-component feature vector to the desired number of classes. In total the
network has 23 convolutional layers. [1]
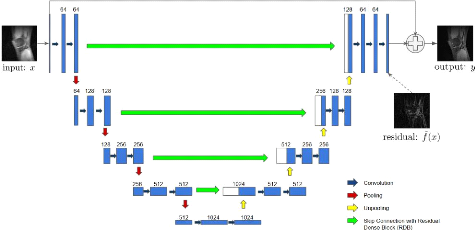
Figure 3.2: unet / Source[1]
· Note You can notice a similarity
between the U-net generator and a Encoder network ,the difference is the skip
connection between the down-sampling and the up-sampling layers. To gain
further intuition on why using a U-Net as a generator for an image to image
translation
24
3.2 The U-net Model
task ,we should look at the depth of we are trying to do ;for
image to image translation we need to conserve the important feature of the
image and use them to create a representation of that image in the target
domain, the bottle- neck of the U-Net can be seen as a simple representation of
all the image features we extracted using the down-sampling layers, we use
those exact features to build our target image through the up-sampling
layers.
3.2.2 The Markovian Discriminator
The Markovian discriminator 3.3 also known as a Patch
discriminator, a discriminator in a U-Net model takes an the generator paired
with the expected image,but different from a regular discriminator classifies
patches of the image instead of the entire image.
... We design a discriminator architecture -wich we term a
Patch GAN - that only penalizes structure at the scale of patches.This
discriminator tries to classify if each N * N patch in a
image is real or fake.We run this discriminator convolutionally across the
image ,averaging all responses to provide the ultimate output of D
-Image-to-image translation with conditional adversarial
networks- [9]
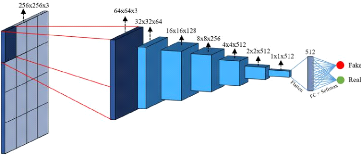

Figure 3.3: Markovian discriminator / Source
[1]
ï Note In the original paper [9]
,Philip Isola et al used a patch of 70 * 70,after proving superior
performance.
3.2.3 The Model Loss Function
the U-Net uses a combination of the regular adversarial loss
and a L1 loss that describe the difference between the generated and the
expected image using the absolute mean euror ,in the original paper [9] they
used a À = 100 :
loss = adversarialloss + À *
L1 (3.2)
25
3.3 Conclusion
· Note The choice of ë =
100 can be seen as a representation of how likely it is to generate any
image in the target image compared to generating the exact image we
want.
3.3 Conclusion
This chapter was an explanation of the architecture we are
gonna use in this project ,U-Net is a complex architecture that uses the
concepts we explained in the previous chapters, gaining an understanding about
those will help to further understand the code ;next chapter will be a
documentation of the project implementation
4
Project Implementation

h Tooling
h UML conception
h The Maps Dataset
h Generator Implementation
h Discriminator Implementation
Introduction
h Pix2Pix Implementation h Model Training h
Model Evaluation h Conclusion
4.1 Tooling
In the scope of this project we used a couple tools in both
the conception and the implementation ,next we will go into a brief explanation
of each tool and what we used it for:
Python: Python is a high-level, interpreted, general-purpose
programming language. the design philosophy of python emphasizes code
readability with the use of significant indentation.python supports multiple
programming paradigms, including structured (particularly procedural),
object-oriented and functional programming.
4.2 Conception
Figure 4.1: python logo / Source[27]
Keras:Keras 4.2 is an open source library that gives a Python's
interface of Artificial Neural Networks ,Keras can be seen as an interface for
TensorFlow library.

27
Figure 4.2: keras logo / Source[11]
Tensorfiow: TensorFlow 4.3 is an open-source software library
for machine learning and artificial intelligence. It can be used across a range
of tasks but it particularly focus on training deep neural networks.
Tkinter 4.4 :tkinter is a way in Python to create Graphical
User interfaces (GUIs),tkinter is included in all standard Python
Distributions. This Python framework provides an interface to the Tk toolkit
and works as a thin object-oriented layer on top of Tk. The Tk toolkit is a
cross-platform collection of `graphical control elements' for building
application interfaces.7
28
4.2 Conception

Figure 4.3: Tensor Flow logo / Source[4]
Figure 4.4: Tkinter symbol /Source [5]
4.2 Conception
To further give a intuitive on the code implementation we will
use the UML and particularly the class diagram to describe the structure of the
model and the inner interaction between the sub-models.
4.3 The Maps Dataset
the maps data set contain two folders for the training and
valuation data, the dataset for the pix2pix model is a couple of the source
image(satellite image) and the target image(map image) 4.5 , in the
implementation of the code we first unpack the data set then load it ,we feed
the satellite image to the generator to transfer it to a map image,then we feed
the generated image along with the original sattelite image to the
discriminator ,then we feed a real data couple to train the discriminator ,for
further explanation look at the previous chapter. here are some example of the
used samples 4.5
29
4.4 Generator Implementation
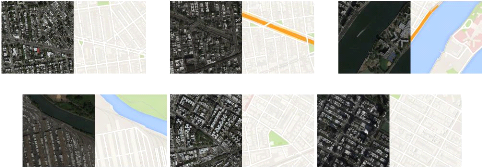
(a) example 1 (b) example 2 (c) example 3
(d) example 4 (e) example 5 (f) example 6
Figure
4.5: Examples from the data set
4.4 Generator Implementation
Listing 4.1: encoder_block
1 def define_encoder_block(layer_in, n_filters,
batchnorm=True):
2 init = RandomNormal(stddev=0.02)
3 g = Conv2D(n_filters, (4,4), strides=(2,2),
padding='same',kernel_initializer=init
)(layer_in)
4 if batchnorm:
5 g = BatchNormalization()(g, training=True)
6 g = LeakyReLU(alpha=0.2)(g)
7 return g
Listing 4.2: decoder_block
1 def decoder_block(layer_in, skip_in, n_filters,
dropout=True):
2 init = RandomNormal(stddev=0.02)
3 g = Conv2DTranspose(n_filters, (4,4), strides=(2,2),
padding='same',
kernel_initializer=init)(layer_in)
4 g = BatchNormalization()(g, training=True)
5 if dropout:
6 g = Dropout(0.5)(g, training=True)
7 g = Concatenate()([g, skip_in])
8 g = Activation('relu')(g)
9 return g
Listing 4.3: generator
1 def define_generator(image_shape=(256,256,3)):
2 init = RandomNormal(stddev=0.02)
3 # image input
4 in_image = Input(shape=image_shape)
30
4.5 Discriminator Implementation
5 # encoder model: C64-C128-56-C512-C512-C512-C512-C512
6 e1 = define_encoder_block(in_image, 64, batchnorm=False)
7 e2 = define_encoder_block(e1, 128)
8 e3 = define_encoder_block(e2, 256)
9 e4 = define_encoder_block(e3, 512)
10 e5 = define_encoder_block(e4, 512)
11 e6 = define_encoder_block(e5, 512)
12 e7 = define_encoder_block(e6, 512)
13 # bottleneck, no batch norm and relu
14 b = Conv2D(512, (4,4), strides=(2,2), padding='same',
kernel_initializer=init)(e7)
15 b = Activation('relu')(b)
16 # decoder model:
CD512-CD1024-CD1024-C1024-C1024-C512-56-C128
17 d1 = decoder_block(b, e7, 512)
18 d2 = decoder_block(d1, e6, 512)
19 d3 = decoder_block(d2, e5, 512)
20 d4 = decoder_block(d3, e4, 512, dropout=False)
21 d5 = decoder_block(d4, e3, 256, dropout=False)
22 d6 = decoder_block(d5, e2, 128, dropout=False)
23 d7 = decoder_block(d6, e1, 64, dropout=False)
24 # output
25 g = Conv2DTranspose(3, (4,4), strides=(2,2),
padding='same', kernel_initializer=
init)(d7)
26 out_image = Activation('tanh')(g)
27 # define model
28 model = Model(in_image, out_image)
29 return model
4.5 Discriminator Implementation
Listing 4.4: encoder_block
1 def define_discriminator(image_shape):
2 init = RandomNormal(stddev=0.02)
3 in_src_image = Input(shape=image_shape)
4 in_target_image = Input(shape=image_shape)
5 merged = Concatenate()([in_src_image, in_target_image])
6 d = Conv2D(64, (4,4), strides=(2,2), padding='same',
kernel_initializer=init)(
merged)
7 d = LeakyReLU(alpha=0.2)(d)
8 d = Conv2D(128, (4,4), strides=(2,2), padding='same',
kernel_initializer=init)(d)
9 d = BatchNormalization()(d)
10 d = LeakyReLU(alpha=0.2)(d)
11 d = Conv2D(256, (4,4), strides=(2,2), padding='same',
kernel_initializer=init)(d)
12 d = BatchNormalization()(d)
13 d = LeakyReLU(alpha=0.2)(d)
14 d = Conv2D(512, (4,4), strides=(2,2),
padding='same', kernel_initializer=init)(d)
31
4.6 Pix2Pix Implementation
15 d = BatchNormalization()(d)
16 d = LeakyReLU(alpha=0.2)(d)
17 d = Conv2D(512, (4,4), padding='same',
kernel_initializer=init)(d)
18 d = BatchNormalization()(d)
19 d = LeakyReLU(alpha=0.2)(d)
20 d = Conv2D(1, (4,4), padding='same',
kernel_initializer=init)(d)
21 patch_out = Activation('sigmoid')(d)
22 model = Model([in_src_image, in_target_image],
patch_out)
23 opt = Adam(lr=0.0002, beta_1=0.5)
24 model.compile(loss='binary_crossentropy', optimizer=opt,
loss_weights=[0.5])
25 return model
4.6 Pix2Pix Implementation
Listing 4.5: decoder_block
1 def define_gan(g_model, d_model, image_shape):
2 d_model.trainable = False
3 in_src = Input(shape=image_shape)
4 gen_out = g_model(in_src)
5 dis_out = d_model([in_src, gen_out])
6 model = Model(in_src, [dis_out, gen_out])
7 opt = Adam(lr=0.0002, beta_1=0.5)
8 model.compile(loss=['binary_crossentropy', 'mae'],
optimizer=opt, loss_weights
=[1,100])
9 return model
4.7 Model Training
Listing 4.6: decoder_block
1 def train(d_model, g_model, gan_model, dataset,
n_epochs=10000, n_batch=1):
2 n_patch = d_model.output_shape[1]
3 trainA, trainB = dataset
4 for i in range(n_epochs):
5 [X_realA, X_realB], y_real = generate_real_samples(dataset,
n_batch, n_patch)
6 X_fakeB, y_fake = generate_fake_samples(g_model, X_realA,
n_patch)
7 d_loss1 = d_model.train_on_batch([X_realA, X_realB],
y_real)
8 d_loss2 = d_model.train_on_batch([X_realA, X_fakeB],
y_fake)
9 g_loss, _, _ = gan_model.train_on_batch(X_realA, [y_real,
X_realB])
10
11 # summarize model performance
12 if (i+1) 'f, 1000 == 0:
13 print('>'f,d, d1['f,.3f] d2['f,.3f] g['f,.3f]' 'f,
(i+1, d_loss1, d_loss2, g_loss))
32
4.8 Model Evaluation
14 summarize_performance(i, g_model, dataset)
4.8 Model Evaluation
for the evaluation we used the human perspective for it's both
efficient and easy ,this method was proposed and used by Ian Goodfellow et al
in the original paper Improved techniques for training gans [24] , there are
other methods for the evaluation of the network performance ,one being the
inception score that uses the inception network to classify the generated
images.
4.9 Conclusion
Throughout this project we used the Pix2pix network to
implement a translation from satellite images to map images , the first chapter
was a introduction to artificial intelligence and machine learning then about
deep learning ,then in the second chapter we advanced towards generative
modeling and we talked about why it is such a useful architecture, in the same
chapter we talked about GAN's and their superior performance in generative
modeling ,in the third chapter we spoke on the pix2pix architecture in
particular since it`'s the used architecture, in the last chapter we went
through the implementation of the code. Since it's introduction by Ian
Goodfellow ,generative adversarial networks held great promises ,this is
totally understandable for the reason that it represent the creativity form of
intelligence and a milestone in the quest of creating general intelligence. The
model would generate better results given more training time and data ,so this
project can be seen as a prototype and there is a room for improvement. The
pix2pix model is also hard to implement cause of it's dataset obligations,the
need for a couple of images from the original and the target domain can be
realised to a certain degree in the satellite/ map application but is extremely
hard for other style transfers,this can be improved using Cycle GAN . I would
like this project to be viewed as an example of what GAN's can do ,and for it
to serve as an inspiration for people wanting to take on this domain.
Bibliography
[1] Jason Brownlee. Generative adversarial networks with
python: deep learning generative models for image synthesis and image
translation. Machine Learning Mastery, 2019.
[2] data science central. artificial neural network.
[Online; accessed January 9,2022 ]. 2019. uRL:
https://www.datasciencecentral.com/the-artificial-neural-networks-handbook-part-1/.
[3]
dataaspirant.com. reccurant
neural network. [Online; accessed January 12,2022 ]. 2021. uRL: https : /
/ dataaspirant . com / how - recurrent - neural - network - rnn - works/.
[4]
datascientest.com.
tensorfiow. [Online; accessed march 14,2022 ]. 2020. uRL: https: //
datascientest.com/tensorflow.
[5]
e-techno-tutos.com.
tkinter. [Online; accessed march 7,2022 ]. 2021. uRL: https://
www.e-techno-tutos.com/2020/12/28/raspberry-tkinter-pour-python/.
[6] David Foster. Generative deep learning: teaching
machines to paint, write, compose, and play. O'Reilly Media, 2019.
[7]
freecontent.manning.com.
computer vison pipeline. [Online; accessed January 12,2022 ]. 2021.
uRL:
https://freecontent.manning.com/computer-vision-pipeline-part-1-the-big-picture/.
[8] Sunila Gollapudi. ?Deep Learning for
Computer Vision? inapril 2019: pages 51-69.
iSBN: 978-1-4842-4260-5. Doi: 10.1007/978-1-4842-4261-2_3.
[9] Phillip Isola andothers.
?Image-to-image translation with conditional adversarial
networks? inProceedings of the IEEE conference on computer
vision and pattern recognition: 2017, pages 1125-1134.
[10] JavaTpoint. What Is Machine Learning: Definition,
Types, Applications And Examples. https : / / www . potentiaco . com/ what
- is - machine - learning - definition - types-applications-and-examples/. 2021
(accessed march, 8, 2022).
[11]
keras.io. keras. [Online;
accessed march 14,2022 ]. 2019. uRL:
https://keras.io/.
[12] Jakub Langr and Vladimir Bok. GANs
in Action (Audiobook). Manning Publications, 2019.
34
BIBLIOGRAPHY
[13] machine learning mastery. A Gentle Introduction to
Batch Normalization for Deep Neural Networks.
https://machinelearningmastery.com/batch-normalization-for-training-of-deep-neural-networks/.
2019 (accessed January 16, 2022).
[14]
medium.com. feed forward neural
network. [Online; accessed January 10,2022 ]. 2021. URL:
https://medium.com/mlearning-ai/training-feed-forward-neural-network-ffnn-on-gpu-beginners-guide-2d04254deca9.
[15]
perso.esiee.fr.
convolution. [Online; accessed January 12,2022 ]. 2021. URL: https: //
perso.esiee.fr/~perretb/I5FM/TAI/convolution/index.html.
[16] Tutorials point. Artificial Intelligence -
Robotics.
https://www.tutorialspoint.
com/artificial_intelligence/artificial_intelligence_robotics.htm#. 2022
(accessed June, 1, 2022).
[17] Alec Radford, Luke Metz and Soumith
Chintala. ?Unsupervised representation learning with deep
convolutional generative adversarial networks? inarXiv
preprint arXiv:1511.06434: (2015).
[18]
researchgate.net. artificial
neuron. [Online; accessed January 8,2022 ]. 2019. URL: https: / / www .
researchgate . net / figure / The - structure - of - the - artificial -
neuron_fig2_328733599.
[19]
researchgate.net. modular
neural network. [Online; accessed January 11,2022 ]. 2021. URL: https : /
/ www . researchgate . net / figure / Modular - neural - network -
structure_fig4_341628332.
[20]
researchgate.net. radial basis
neural network. [Online; accessed January 10,2022 ]. 2021. URL:
https://www.researchgate.net/figure/Architecture-
of- the- RBF-neural-network-RBF-radial-basis-function_fig2_333469185.
[21]
researchgate.net. The general
autoencoder architecture. [Online; accessed January 14,2022 ].2021.URL:
https://www.researchgate.net/figure/The-general-autoencoder-architecture_fig2_328760180.
[22]
researchgate.net. variational
distribution. [Online; accessed January 14,2022 ]. 2020. URL:
https://www.researchgate.net/figure/Variational-Bayes-approximate-posteriors
- for - the - regression - model - parameters - and - four _ fig2 _
227369415.
[23] Stuart J Russell. Artificial intelligence a modern
approach. Pearson Education, Inc., 2010.
[24] Tim Salimans andothers.
?Improved techniques for training gans?
inAdvances in neural information processing systems: 29
(2016).
[25]
whichfaceisreal.com. fake
faces using style gan. [Online; accessed february 14,2022 ]. 2019. URL:
https://www.whichfaceisreal.com/methods.html.
[26] Wikipedia, the free encyclopedia. neuron.
[Online; accessed January 7,2022 ]. 2021. URL:
https://ar.wikipedia.org/wiki/%D9%85%D9%84%D9%81:Neuron.svg.
35
BIBLIOGRAPHY
[27] Wikipedia, the free encyclopedia. python. [Online;
accessed march 14,2022 ]. 2019. URL:
https://fr.m.wikipedia.org/wiki/Fichier:Python.svg.
| 


{kind=link}
{kind=link}