Conclusion
Toutes les fonctions et applications décrites dans ce
chapitre apportent confort et bien-être. Le fait que nos maisons soient
en outre plus sûres, capables de communiquer et dotées d'un
minimum d'autonomie est également à considérer. Si, de
surcroît, l'investissement initial permet de faire évoluer
l'installation à moindre frais et de limiter les coûts
d'exploitation,
choisir de rendre sa maison intelligente apparaît
comme un choix judicieux, et non plus comme un luxe.
Encore faut-il que les aspects purement technologiques
laissent la place à une simplicité d'utilisation pour tous. Le
succès de l'intégration des nouvelles technologies passe par une
bonne conception en amont, le choix de solutions standardisées, une
adéquation
des solutions aux attentes des utilisateurs et un
accompagnement dans la prise en main des systèmes.
Avant de
détailler les fonctions disponibles dans notre système de
commande, nous introduisons dans le chapitre suivant la façon de les
mettre en oeuvre.
CHAPITRE 4 : CONCEPTION
ET REALISATION D'UN SYSTEME DE COMMANDE A DISTANCE D'UNE MAISON INTELLIGENTE A
BASE D'ARDUINO
4.1. Présentation du cahier de charge
L'objectif de notre travail est de concevoir une maison
didacticiel pour établir les fonctions de la domotique suivantes :
Ø Gestion d'ouverture sécuriséepar code
de la porte principale. L'ouverture étant assurée par un
servomoteur. Et si un code incorrect est tapé trois fois, l'alarme de la
maison se déclenche automatiquement.
Ø Gestion d'éclairage assurée par
l'intermédiaire de l'application web
Ø Acquisition de la température et
humidité par le capteur DHT11 puis affichage de ces données sur
écran LCD et sur une page web de la maison.
Ø Contrôle d'incendie par le capteur de flamme
puis déclenchement automatique de l'alarme en cas de détection de
la flamme.
Ø La commande des organes du système domotique
sera faite par la liaison de l'interface graphique de la page web de la maison
et le wifi via un module Ethernet monté avec la carte de commande.
Le schéma synoptique suivant va nous permettre de mieux
comprendre le fonctionnement global du système étudié
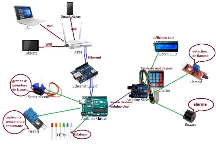
Figure 4.1-1 Schéma
synoptique du système à réaliser
4.2. Outils utilisés
pour le développement du système de commande
Dans cette partie, nous allons détailler l'ensemble des
outils matériels et logiciels qui nous ont
permis de mettre en place
le système commandé réalisé dans ce travail.Nous
nous étalerons principalement sur la carte Arduino Uno, ainsi que
l'ensemble des actionneurs et des capteurs que nousavons pu intégrer
dedans.
4.2.1. Carte Arduino Uno
Arduino Uno est une carte à
microcontrôleur basée sur l'ATmega328P. Il possède 14
broches d'E/S numériques, 6 entrées analogiques, un quartz 16
MHz, une connexion USB, une prise d'alimentation, un en-tête ICSP et un
bouton de réinitialisation.Il contient tout le nécessaire pour
prendre en charge le microcontrôleur.
Pour démarrer, on a besoin de connecter la carte de
commande sur un ordinateur via un câble USB, ou bien tout simplement la
connecter sur une batterie d'alimentation.
Vous pouvez bricoler votre UNO sans trop vous soucier de
faire quelque chose de mal, dans le pire des cas, vous pouvez remplacer le puce
pour quelques dollars et recommencer.
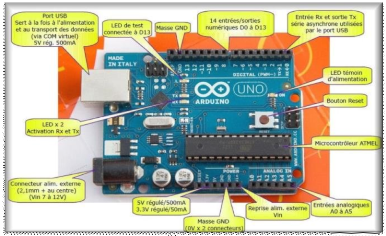
Figure 4.2-1 la carte Arduino
Uno[8]
"Uno" signifie « un » en italien
et a été choisi pour marquer la sortie de Arduino Software (IDE)
1.0.La carte Uno et la version 1.0 du logiciel Arduino (IDE) étaient les
versions de référence d'Arduino, qui ont maintenant
évolué vers de nouvelles versions.La carte Uno est la
première d'une série de cartes USB Arduino et le modèle de
référence pour la plate-forme Arduino.
| 

