|
__
INSTITUT SUPERIEUR POLYTECHNIQUE,
INFORMATIQUE,
TELECOMMUNICATIONS ET TECHNOLOGIES AVANCEES
INITELEMATIQUE / BUJUMBURA
FACULTE DE GENIE INFORMATIQUE ET
TELECOMMUNICATIONS
B.P : 6019
CONCEPTION ET REALISATION DE LA COMMANDE A DISTANCE
D'UNE MAISON INTELLIGENTE A BASE D'ARDUINO
251656704
BUJUMBURA, MAI 2019
251659776
Mémoire présenté et soutenu
publiquement par:
David SADIKI
&
Hélène OMOY KOMBE
Pour l'obtention du diplôme
de Baccalauréat Ingénierie.
251658752
Sous la direction de:
Msc Edmond NIREMA
251657728
DEDICACE
Nous dédions ce modeste travail à ceux qui nous
ont donné la vie, noschers parents qui se sont sacrifiés jour et
nuit pour notre bonheur et notreréussite, et ont fait de sorte que rien
ne nous manque, vous méritez tout éloge. Vous qui avez fait de
nous ce que nous sommes aujourd'hui, nous espérons être comme vous
l'avez souhaité. Que Dieu vous garde et vous bénisse.
A nos chers frères et soeurs, camarades, et amis
pour leurs affections et leur encouragement qui ont toujours été
pour nous de plus précieux, nous vous souhaitons pleinde bonheur et de
réussite dans vos vies.
A tous ceux qui nous sont chers.
A tous ceux que nous connaissons de près ou de
loin.
A tous ceux que nous aimons, et à tous ceux qui
nous aiment.
Nous vous dédions ce travail.
Hélène et David
REMERCIEMENTS
Je tiens à remercier toutes les personnes qui ont
contribué au succès de mon parcours, à cet effet, je
présente tout d'abord mes nobles remerciements à Dieu Tout
Puissant pour ses innombrables grâces en mon égard.
Ensuite je remercie tous les autorités
académiques de l'INITELEMATIQUE plus particulièrement
Monsieur le Recteur SADOCKpour la qualité
d'enseignement et sa rigueur pour ma formation, ainsi que
notre directeur de ce dit mémoire, Monsieur Edmond NIREMA
pour son temps, son expertise et sa disponibilité.
Je remercie de tout coeur mes très chers et tendres
parents, mon père LULU KOMBE Basile et ma
mère Bénite BADERHA M'MAS qui m'ont montré le
chemin si merveilleux : « les études » que
voici à son terme et de m'avoir soutenu moralement, spirituellement,
financièrement et matériellement pour la réussite de mon
parcours sans encombre.
Je présente ma grande reconnaissanceà Mgr
Pascal DESTHIEUX, à mon Très Cher grand
père Francis DUPOND,à MonsieurKaitho
NGONGO et son épouseCIVAVA Lili, à
toute la famille MBALA, à MonsieurKABAMBA
LUBAMBA et à Mademoiselle Christine NGONGO.Je suis
à la fois touchée et reconnaissante pour l'aide que vous m'avez
apportée. Et je ne pourrai jamais vous remercier assez.
Je tiens à remercier vivement toute la grande famille
KOMBE, mes oncles :Raphael Kombe, Kombe
Dimandja, Moise Dimandja et Michael
Kombe, mes tantes : Léonie Wimba,
Feza Kombe, Elisabeth Kombe et Marie
Kombe ; tous mes frères et soeurs
Virginie, Patrick,
Toussaint, Bénédicte,
Prisca,Benoît, etc. ainsi que mon oncle
paternel Paulin M'MAS etson épouse Annick
BUHENDWA. Pour votre amour inconditionnel, vos conseils ainsi que
vos encouragements. Mes remerciements ne pourront jamais égaler vos
grands coeurs qui m'apportent du soutien à chaque moment où j'ai
besoin d'aide. Vous êtes mes anges gardiens.
Enfin, je remercie tous les compagnons de classe, en
particulierDavid SADIKI, les amis et les connaissances ainsi
que tous ceux dont les noms ne figurent pas sur cette liste et qui par leur
sympathie m'ont aidé, soutenu et encouragé ; trouvez ici
l'expression de mes sentiments de reconnaissance.
Hélène OMOY KOMBE
REMERCIEMENTS
Je commencerais, avant tout, ce discours en faisantdes
remerciements solennels à Dieu, qui m'a donné la force et la
patience nécessaires à l'accomplissement de ce travail.
Qu'il me soit permis de rendre un vibrant hommage à mon
encadreur, Monsieur Edmond NIREMA pour avoir bien voulu
diriger ce travail et donner de son temps à la réussite de ce
projet, je remercie également Monsieur SADOCK, le
recteur de l'INITELEMATIQUE, pour la qualité d'enseignement et son
effort fourni pour ma formation.
Je tiens à exprimer toute ma reconnaissance à
mon feu pèreSadiki Bin Ramazani, à ma
mèreAdela Masupa, mes très chers oncles Djuma
MATENGA et Saleh MATENGA qui ont toujours
été là pour moi. Un grand merci à ma soeur
NGERANYA Agnès et mon grand frère
MUTUMBI Matenga pour leurs soutient constant. Et à tous
mes petits frères je dis merci pour leurs encouragements. Je remercie de
même ma tante MAGAMBO Rose pour son soutient
inestimable. Je désire aussi remercier Apôtre Simon Claude
Nduwimanaet son épouse HABONIMANA Solange pour
leurs conseils tant moraux que spirituels.
J'adresse mes sincères remerciements à tous les
enseignants, depuis l'école primaire jusqu'à l'université
et plus spécialement ceux de l'INITELEMATIQUE qui m'ont fourni les
outils nécessaires à la réussite de mon cursus
académique.
Enfin, j'adresse mes remerciements à tous mes proches
et amis qui m'ont accompagné, aidé, soutenu et encouragé
tout au long de mon cursus. Je présente mes remerciements, mon respect
et ma gratitude.
David SADIKI
SIGLES ET ABREVIATIONS
ADSL :
Asymmetric Digital Subscriber Line.
API: Application Programming Interface
AREF: AnalogReference
ASIC:Application Specific Integrated Circuits
ATM:Automated Teller Machines
CAN : Convertisseur Analigique
Numerique
CMS : Composants Montés en
Surface
CNA : Convertisseur Numerique
Analogique
CPL : Courant Porteur en Ligne.
CPU:Central Processing Unit
CSS: Cascading Style Sheets
DSP: Digital Signal Processor
EEPROM: Electrically Erasable Programmable
Read-Only Memory
EPROM: Erasable Programmable Read-Only
FPGA: Field Programmable Gate Array
FTP:
Foiled Twisted Pair
GND: Ground
GPRS :
General Packet Radio Service
HDMI: High-Definition Multimedia Interface
HTTP: HyperText Transfer Protocol
IDE: Integrated Development Environment
IHM: Interface Homme Machine
IoT :
Internet of Things
E/S: Entrees /sorties
KNX: Konnex,
LCD: Liquid Crystal Display
LED: Light Emitting Diode
uc:Microcontroleur
MISO: Master Input, Slave Output
MLI: Modulation de Largeur d'Impulsion
Mo: Mega Octet
MOSI: Master Output, Slave Input
OS: Operating System
PC: Personal Computer
PDA: Personal Digital Assistant
PHP: PHP Hypertext Preprocessor
PWM: Pulse Width Modulation
RFID: Radio Frequency Identification
ROM: Read Only Memory
SCK: Serial Clock
SQL: Structured Query Language
SMD: Surface Mount Device
SMS: Short MessageService
SoC: System on a Chip
SPI :
Serial Peripherique Interface
SRAM: Static Random Access Memory
SS: Slave Select
STP: Shielded
Twisted Pair
TWI:Two Wire Interface
UART :
Universal Asynchronous Receiver Transmitter
USB: Universal Serial Bus
UTP: Unshielded Twisted Pair
TABLE DE MATIERE
DEDICACE
ii
REMERCIEMENTS
iii
REMERCIEMENTS
iv
SIGLES ET ABREVIATIONS
v
TABLE DE MATIERE
viii
LISTE DE FIGURES
x
LISTE DE TABLEAUX
xi
0. INTRODUCTION GENERALE
1
CHAPITRE 1 : GENERALITES SUR LES
SYSTEMES EMBARQUES
5
1.1. Introduction
5
1.2. Historique
6
1.3. Avantages de systèmes
embarqués
6
1.4. Classification de systèmes
embarqués
7
1.5. Architecture d'un système
embarque
7
1.6. Générations des
systèmes embarqués
8
1.7. Les contraintes de systèmes
embarqués
10
1.8. Domaine d'application de systèmes
embarqués
11
1.9. Kit de développement pour
systèmes embarqués
11
1.10. Famille de microcontrôleurs
14
1.11. Conclusion
15
CHAPITRE 2 : PRESENTATION MATERIELLE ET
LOGICIELLE DE L'ARDUINO
17
2.1. Introduction
17
2.2. Généralités sur
l'Arduino
17
2.3. Etude de la partie matérielle
24
2.4. Etude de la partie logicielle
26
2.5. Conclusion
27
CHAPITRE 3 : GENERALITES SUR LA
DOMOTIQUE
28
3.1 Introduction
28
3.2. Définition de la domotique
28
3.3. Technologies de la domotique
28
3.4. Domaines d'application de la
domotique
33
3.5. Avantages de la domotique
33
3.6. La communication de la maison avec le
monde extérieur
35
3.7. Conclusion
35
CHAPITRE 4 : CONCEPTION ET REALISATION D'UN
SYSTEME DE COMMANDE A DISTANCE D'UNE MAISON INTELLIGENTE A BASE D'ARDUINO
36
4.1. Présentation du cahier de
charge
36
4.2. Outils utilisés pour le
développement du système de commande
37
4.3. Réalisation du système de
commande et contrôle d'une maison intelligente
54
4.4. Algorithme de commande et
contrôle
57
4.5. Conclusion
61
CONCLUSION GENERALE
62
BIBLIOGRAPHIE
64
LISTE DE FIGURES
Figure 1.5-1 Architecture générale des
systèmes embarqués
3
Figure 1.9-1 Exemple de kit de développement
basé sur Arduino Uno (starter Kit)
12
Figure 2.2-1 Carte Arduino Duemilanove et Carte
Arduino Uno
18
Figure 2.2-2 carte Arduino Leonardo
19
Figure 2.2-3 carte Arduino Mega
19
Figure 2.2-4 carte Arduino Mega ADK
20
Figure 2.2-5 Carte Arduino Due
20
Figure 2.2-6 Carte Arduino Nano
21
Figure 2.2-7 Carte Arduino Mini Pro
21
Figure 2.2-8 Carte Arduino Yun
22
Figure 2.3-1 Exemple de carte électronique:
Arduino Severino
24
Figure 2.4-1 Interface du logiciel Arduino
25
Figure 3.3-1 Représentation graphique
schématique d'items relatifs à l' « habitat intelligent
» (version évoluée de la domotique des années
1970-80), avec leurs relations entre eux et l'usager. [7]
32
Figure 4.1-1 Schéma synoptique du
système à réaliser
37
Figure 4.2-1 la carte Arduino Uno
[8]
38
Figure 4.2-2 le module Ethernet Shield HanRun
HR11105A 17/32
43
Figure 4.2-3 servomoteur [9]
44
Figure 4.2-5 Capteur de flamme KY-026
[10]
45
Figure 4.2-6 potentiomètre pour ajuster la
sensibilité du capteur.
46
Figure 4.2-7 branchement sur le breadboard
47
Figure 4.2-8 capteur de température et
humidité DHT11
47
Figure 4.2-9 brochage des pins du capteur sur
Arduino [11]
48
Figure 4.2-10 afficheur LCD 16x2
49
Figure 4.2-11 Connecteur de l'afficheur LCD
50
Figure 4.2-13 buzzer
51
Figure 4.2-14 clavier matriciel et son schéma
de principe
51
Figure 4.2-15 connexion du clavier sur arduino
Uno
52
Figure 4.2-16 types de led
52
Figure 4.2-17 point d'accès TP-Link.
53
Figure 4.3-1 phase de la réalisation de la
maquette
54
Figure 4.3-2 Résultat final de la
maquette
55
Figure 4.4-1 Organigramme pour le fonctionnement
automatique de l'application.
57
Figure 4.4-2 Organigramme décrivant le
fonctionnement manuel du projet.
58
Figure 4.4-3 page de l'ouverture de la porte
59
Figure 4.4-4 page pour l'éclairage dans la
maison
60
Figure 4.4-5 page pour le contrôle de
l'incendie
62
LISTE DE TABLEAUX
Tableau 1 Comparaison entre les différents
protocoles sans fil [6]
3
Tableau 2 Présentation des
caractéristiques de la carte Arduino Uno
38
Tableau 3 Différentes broches
entrées/Sorties numériques
40
Tableau 4 Nomenclature du connecteur de l'afficheur
LCD
50
INTRODUCTION GENERALE
L'évolution de la technologie et du mode de vie nous
permet aujourd'hui de prévoir des espaces detravail et de logement mieux
adaptés, tant en nouvelle construction qu'en rénovation. Nous
devonsces nouvelles possibilités principalement aux progrès
réalisés en électronique, informatique et à la
nouvelleconception des réseaux de communication tant à
l'intérieur qu'à l'extérieur des habitations.
1.1 Contexte
Lorsqu'on parle des technologies de
télécommunications, ce qui nous revient immédiatement
à l'esprit ce sont : les techniques de la communication vocale,
l'envoi et la réception des SMS, l'internet, et tout ce qui fonctionne
en utilisant cette technologie moderne introduite dans notre vie
quotidienne.
Cette technologie bouleverse notre mode de vie, pourtant nos
maisons continuent d'être conçues comme il y a trente ans, sans
tenir compte de ces évolutions, comme si l'endroit où nous
passons plus de la moitié de notre temps n'en valait pas la peine. De
même, La majorité des individus, et plus particulièrement
lespersonnes âgées, passent une grande partie de leur temps
à domicile, d'où l'influence considérable de l'habitatsur
la qualité de vie.
La domotique ou encore la maison intelligente est
définie comme une résidence équipée detechnologies
d'informatique, d'automatisme et d'électronique, ambiante qui vise
à assister l'habitantdans les situations diverses de la vie domestique
en améliorant le confort par lasimplification d'un certainnombre de
tâches.
1.2 Problématique
- Nos maisons sont dépourvues de système de
sécurité, ce qui engendre un taux élevé de
cambriolage des habitats.
- Laconsommation abusive d'énergie en notre absence
à la maison est considérable juste parce qu'en l'absence des
occupants de la maison on ne peut pas contrôler les appareils qui
consomment l'énergie électrique.
- Le nombre de victime d'incendie ou de gaz toxiques est
très important à cause du manque des systèmes de
détection et d'alarme de ces gaz.
C'est là où la domotique fait surface pour
trouver des solutions à ces problèmes, car l'amélioration
du sentiment de sécurité et de confort dans l'habitat
apparaît donccomme une tâche d'une grande importance sociale.
La domotique ouvre non seulement de nouvelles
possibilités dans le domaine de l'automatisation del'habitation, mais
constitue aussi et surtout un moyen offert à l'individu de
contrôler et de gérer sonhabitat.
Mais comment y parvenir ?
Grâce à cette nouvelle technologie, une mise en
place d'un système domotique permettra à l'habitant de mieux
gérer son milieude travail et de vie sur le plan de la
sécurité, du confort, des communications et des
tâchesménagères.
1.3 Objectifs du travail
· Objectif global
Les objectifs primordiaux de ce projet portent sur la
conception et la réalisation d'une Maison Intelligente, l'apport de la
domotique sur la sécurité dans l'habitat et l'optimisation du
confort à partir d'une application web commandée à
distance par un smartphone.
· Objectif spécifique
Pour atteindre l'objectif global, la mise en disposition d'un
système domotique didactique permettra :
- L'accès sécurisé de la porte principale
de la maison par un mot de passe ;
- La gestion d'éclairage ;
- L'acquisition de la température et
humidité ;
- Le contrôle du chauffage et de la ventilation
- Et enfin le contrôle de la flamme au risque de
l'incendie de la maison.
1.4 Intérêt du sujet
« Rien ne se fait sans cause ni
intérêt, car l'intérêt est le moteur des
actes », disait le psychologue OVIDE DECROLY dans son livre The
political in society (Paris, 1907). [1]
Ce travail présente donc un intérêt
à plusieurs niveaux : intérêt personnel,
intérêt académique et scientifique, et intérêt
social.
a. Intérêt personnel
C'est pour nous un réel plaisir de traiter un sujet du
domaine, car nous estimons que les recherches sur le sujet contribueront
à améliorer et à perfectionner les connaissances acquises
tout au long de notre cursus universitaire ainsi que la maitrise des outils
utilisés tout au long de nos recherches.
b. Intérêt académique et
scientifique
Les hommes passent mais l'histoire qu'ils ont écrite
reste comme un monument. Nous ne faisons pas ce travail uniquement pour
l'obtention du diplôme mais pour qu'il soit un miroir pour les autres
chercheurs qui viendront après nous. Nous voulons que ceux qui viendront
après nous trouvent une documentation bien faite, fiable,
nécessaire et utile qui les aidera à parachever leurs
investigations. Que ce document soit un modèle parfait pour eux.
c. Intérêt social
Savoir sécuriser nos maisons est primordial non
seulement pour nos biens mais aussi et surtout pour notre propre vie. Pour ce,
ce travail apporte une aide considérable pour toute personne qui voudra
sécuriser sa vie et sa famille.
1.5 Délimitation du sujet
Selon Madeleine GRAWITZ, « Limiter son sujet, c'est
déterminer ce que l'on retient mais c'est aussi écarter un
certain nombre de problèmes ». [2]Comme tout
autre travail scientifique, notre sujet est limité dans le temps et dans
le domaine.
* Dans le temps : notre travail est limité dans
l'intervalle de Janvier en Mai 2019.
* Dans le domaine : comme son intitulél'indique,
notre travail est limité dans le domaine de l'informatique, de
l'électronique et de la télécommunication.
1.6 Méthodologie et technique de
recherche
La réalisation d'un travail de recherche exige des
techniques et méthodes appropriées pour atteindre les
résultats souhaités. Pour ce travail de recherche, nous avons
fait recours aux techniques et méthodes suivantes :
a. La technique documentaire
Elle entraine nécessairement une recherche dans
différentes bibliothèques, sur Internet, dans différentes
notes des cours et certains travaux de mémoires. Grace à cette
technique nous avons eu accès à certaines informations
nécessaires pour l'accomplissement de notre travail.
b. La méthode d'observation
Selon Louis Pasteur, dans la Revue des cours scientifiques,
il dit « les conceptions les plus hardies, les
spéculations les plus légitimes ne prennent un corps et une
âme que le jour où elles sont consacrées par l'observation
et l'expérience. » pour bien accomplir ce travail,
l'observation mener dans nos maisons était d'une importance capitale
afin de développer la théorie abstraite.
1.7 Organisation du travail
Pour permettre une bonne conception de notre travail, nous
nous sommes proposé de le diviser en quatre chapitres, lesquels sont
précédés d'une introduction générale et
bouclés par une conclusion générale.
Le premier chapitre est dédié à la
présentation générale des systèmes embarqués
ainsi que ses secteurs d'application et les différents types de
technologies qu'ils utilisent.
Ensuite, le second chapitre est consacré, d'une part,
à la description de la partie matérielle du projet en
présentant les généralités sur l'Arduino et enfin
une description de la partie logicielle du projet.
Les généralités sur la domotique feront
l'objet du troisième chapitre.
Enfin, la conception et la réalisation d'un
système de commande à distance d'une maison intelligente via
Arduino fera l'objet du quatrième chapitre dans lequel est
démontrée la présentation du cahier des charges et les
fonctions décrivant les raisonnements du programme de commande
implémenté sur la carte Arduino Uno.
CHAPITRE 1 :
GENERALITES SUR LES SYSTEMES EMBARQUES
Introduction
Les systèmes électroniques sont de plus en plus
présents dans la vie courante. Les ordinateurs et micro-ordinateurs sont
des systèmes électroniques bien connus. Mais
l'électronique se trouve maintenant embarquée dans de très
nombreux objets usuels : les téléphones, les agendas
électroniques, les voitures. Ce sont ces systèmes
électroniques enfouis dans les objets usuels qui sont appelés
systèmes embarqués.
Un système embarqué est défini comme un
système
électronique
et
informatique autonome,
souvent
temps
réel, spécialisé dans une tâche bien
précise. Le terme désigne aussi bien le
matériel
informatique que le
logiciel utilisé.
C'est donc un système complexe qui intègre du logiciel et du
matériel conçus ensemble afin de fournir des
fonctionnalités spécifiques. Il contient
généralement un ou plusieurs microprocesseurs
destinés à exécuter un ensemble de
programmes définis lors de la conception et
stockés dans des mémoires.
Un système embarqué est autonome et ne
possède pas des entrées/sorties standards tels qu'un clavier ou
un écran d'ordinateur. Contrairement à un PC, l'interface
homme-machine d'un système embarqué peut être aussi simple
qu'une diode électroluminescente qui clignote ou aussi complexe
qu'un système de vision de nuit en temps réel ; les afficheurs
à cristaux liquides LCDde structure généralement simple
sont couramment utilisés.
Afin d'optimiser les performances et la fiabilité de
ces systèmes, des circuits numériques programmables FPGA, des
circuits dédiés à des applications spécifiques
ASIC ou des modules analogiques sont de plus en plus utilisés.
Le logiciel a une fonctionnalité fixe à
exécuter qui est spécifique à une application.
L'utilisateur n'a pas la possibilité de modifier les programmes. Bien
souvent, il n'a pas conscience d'utiliser un système à base des
microprocesseurs.
Les systèmes embarqués sont désormais
utilisés dans des applications diverses tels que le transport
(avionique, espace, automobile, ferroviaire, ...), dans les appareils
électriques et électroniques (appareils photo, jouets, postes de
télévision, électroménager, systèmes audio,
téléphones portables, ...), dans la distribution
d'énergie, dans l'automatisation, etc.
1.1. Historique
L'un des premiers systèmes modernes embarqués
reconnaissables a été le
Apollo
Guidance Computeren 1967, le système de guidage de la mission
lunaire
Apollo,
développé par
Charles Stark
Draper du
Massachusetts
Institute of Technology. Il s'agit de l'ordinateur de bord des vaisseaux
spatiaux du programme Apollo, qui a amené Neil Alden Armstrongsur la
lune. Cet ordinateur contrôlait en temps réel les
paramètres de vol et adaptait la trajectoire.
L'Intel 4004 développé en 1971, le premier
microprocesseur, était le premier circuit intégré
incorporant tous les éléments d'un ordinateur dans un seul
boîtier: unité de calcul, mémoire, contrôle des
entrées / sorties.
Brève histoire des systèmes
embarques :
· 1967 : Apollo Guidance Computer, premier
système embarqué. Environ un millier de circuits
intégrés identiques (porte NAND).
· 1960-1970 : Missile Minuteman, guidé par
des circuits intégrés.
· 1971 : Intel produit le 4004, premier
microprocesseur, à la demande de Busicom. Premier circuit
générique, personnalisable par logiciel.
· 1972 : lancement de l'Intel 8008, premier
microprocesseur 8 bits (48 instructions,800kHz).
· 1974 : lancement du 8080, premier microprocesseur
largement diffusé. 8 bits (64KB d'espace adressable, 2MHz-3MHz).
· 1978 : création du Z80, processeur
8bits.
· 1979 : création du MC68000, processeur
16/32 bits. [3]
1.1. Avantages de systèmes embarqués
Les systèmes embarqués présentent
plusieurs avantages, on peut citer :
- La simplicité ;
- La flexibilité des systèmes
informatiques ;
- La faible consommation d'énergie ;
- La miniaturisation ;
- La robustesse des plages de fonctionnement ;
- Une grande capacité d'adaptation à leur
environnement de fonctionnement ; etc...
1.2. Classification de systèmes embarqués
On peut distinguer quatre principaux types de systèmes
embarqués en fonction du type d'application visé :
1. Les systèmes embarqués à usage
général exécutent des applications similaires à
celles exécutées sur des ordinateurs
« traditionnels », mais ils sont embarqués dans des
packages de petite taille. On a, par exemple, les assistants personnels (PDA)
et les guichets automatiques bancaires (ATM).
2. Les systèmes embarqués de contrôle sont
utilisés pour effectuer un contrôle en boucle rétroactive
fermée de systèmes temps réel. On les retrouve notamment
dans les moteurs de voiture, les centrales nucléaires et pour le
contrôle aérien.
3. Les systèmes embarqués pour traiter des
signaux, c'est-à-dire réaliser des calculs sur des gros flux de
données. Ces derniers se retrouvent typiquement dans le traitement audio
et vidéo et dans les radars et sonars.
4. Les systèmes embarqués sont également
utilisés dans le domaine des communications et réseaux, pour
effectuer la transmission de données et réaliser des
communications. Ils sont notamment utilisés dans la
téléphonie et pour l'internet.
1.3. Architecture d'un système embarque
Les systèmes embarqués utilisent
généralement des
microprocesseurs
à basse
consommation
d'énergie ou des
microcontrôleurs,
dont la partie
logicielle est en partie
ou entièrement programmée dans le matériel,
généralement en mémoire dans une
mémoire morte
(ROM),
EPROM,
EEPROM,
FLASH, etc.
Un système embarqué est constitué de deux
types de composantes : des composantes matérielles et de
composantes logicielles. Cette composition dépend fortement du type de
système embarqué.
La figure1.5-1 résume les composantes de base que l'on
rencontre par exemple dans tous les systèmes embarqués
dédiés au contrôle.

Figure 1.4-1 Architecture
générale des systèmes embarqués
L'architecture de base est généralement
composée d'une unité centrale de traitement (CPU), d'un
système d'exploitation qui réside parfois uniquement en un
logiciel spécifique, ainsi que de capteurs (capteurs de
température, de flamme, de vibration,
accéléromètre, GPS...) et d'actionneurs (moteurs, buzzer,
lampe, ...).
Ici, le fonctionnement de notre système peut se
résumer ainsi :
· Réception des informations depuis
l'environnement extérieur à travers les différents
capteurs.
· Numérisation des données captées
pour un traitement de l'information en temps réel par l'ensemble CPU,
ASIC et systèmes auxiliaires via le logiciel embarqué.
· Le résultat du traitement effectué
crée une commande qui est envoyée sur les actionneurs (par
exemple les moteurs) pour ainsi modifier l'environnement extérieur.
1.4. Générations des systèmes
embarqués
Dans cette section nous présenterons les architectures
supportées par quatre générations d'outils de
conception.
1.4.1. Les systèmes embarqués de première
génération
Les premiers systèmes embarqués ne pouvaient
fournir que des fonctions simples ne requérant que peu de puissance de
calcul. Leur architecture ne peut pas supporter les fonctionnalités
requises pour les systèmes embarqués actuels à qui il est
demandé non seulement d'effectuer du contrôle, mais aussi des
calculs complexes tels que ceux requis pour le traitement numérique du
signal. Le système intégré de première
génération est conçu avec un microprocesseur 8 bits ou un
microcontrôleur 4 bits. Ils ont des circuits matériels très
simples. Les firmwares sont conçus en langage
d'assemblage. Par exemple: clavier numérique, commande de moteur pas
à pas, etc.
1.4.2. Les systèmes embarqués de deuxième
génération
Les systèmes intégrés de deuxième
génération sont conçus avec 16 bits pour microprocesseur
ou 8 bits microcontrôleur. Ils ont une configuration matérielle
complexe que la première génération. Ils peuvent contenir
un système d'exploitation intégré.
1.4.3. Les systèmes embarqués de
troisième génération
Les progrès de l'intégration permettent
d'envisager des circuits pouvant contenir plusieurs milliers de portes. Il
devient donc techniquement possible de fabriquer des systèmes
embarqués pouvant remplir toutes les fonctionnalités
souhaitées.
Construit autour des microprocesseurs 32 bits et des
microcontrôleurs 16 bits. Des concepts tels que les processeurs de
signaux numériques (DSP) et les circuits intégrés à
applications spécifiques (ASIC) ont évolué pour pouvoir supporter conjointement les besoins en puissance
et en flexibilité, ces architectures comprennent de plus en plus de
processeurs, qui peuvent chacun se comporter en maître : l'architecture
couramment utilisée, basée sur un processeur central
contrôlant le reste du système, n'est donc plus suffisante.
1.4.4. Les systèmes
embarqués de quatrième génération
Les systèmes embarqués de quatrième
génération sont conçus autour des microprocesseurs 64 bits
et des microcontrôleurs 32 bits. Le concept de système sur puce
(SoC) et de processeurs multi coeurs a évolué. Très
complexe et très puissant.Exemples: téléphones
intelligents.
1.5. Les contraintes de systèmes embarqués
Les systèmes embarqués exécutent des
tâches prédéfinies et ont un cahier des charges
contraignant à remplir, qui peut être d'ordre :
ü De coût : le prix de revient doit être
le plus faible possible surtout s'il est produit en grande
série ;
ü D'autonomie énergétique: les objets
embarqués ne disposent pas nécessairement d'une alimentation
électrique. Il est donc primordial que la consommation
énergétique soit minimum afin de garantir une performance
optimale à tout moment tout en garantissant unefaible
consommation d'énergie;
ü D'espace mémoire, ayant un espace mémoire
limité de l'ordre de quelques
Mo maximum. Il convient
de concevoir des systèmes embarqués qui répondent aux
besoins au plus juste pour éviter un surcoût ;
ü De puissance de calcul : il convient d'avoir la
puissance de calcul juste nécessaire pour répondre aux besoins et
aux contraintes temporelles de la tâche prédéfinie. Les
processeurs utilisés dans les systèmes embarqués sont 2
à 3 décades moins puissantes qu'un processeur d'un ordinateur PC.
Ceci en vue d'éviter un surcoût de l'appareil et une consommation
excédentaire d'énergie (courant électrique) ;
ü Temporel : dont les temps d'exécution et
l'échéance temporelle d'une tâche sont
déterminés
(les délais sont connus ou bornés a priori). Cette
dernière contrainte fait que généralement de tels
systèmes ont des propriétés
temps
réel ;
ü Sécurité: Certains
systèmes collectent des centaines de données en permanence qui
sont transmises (Radio, LAN, etc.) et peuvent être confidentielles. Un
système embarqué peut donc être soumis à une
politique de protection des données ;
ü Fiabilité et
sûreté
de fonctionnement : car s'il arrive que certains de ces
systèmes embarqués subissent une défaillance, ils mettent
des vies humaines en danger ou mettent en péril des investissements
importants. Ils sont alors dits « critiques » et ne doivent
jamais faillir. Par « jamais faillir », il faut comprendre
toujours donner des résultats justes, pertinents et ce dans les
délais attendus par les utilisateurs (machines et/ou humains) des dits
résultats ;
1.6. Domaine d'application de systèmes
embarqués
Les domaines dans lesquels on trouve des systèmes
embarqués sont de plus en plus nombreux :
·
Astronautique :
fusée,
satellite
artificiel,
sonde spatiale,
etc.
· Domotique ;
· Robotique ;
·
Télécommunication :
téléphonie,
routeur,
pare-feu,
serveur de
temps,
Téléphone
portable ;
·
Automate programmable industriel, contrôle et commande ;
· Equipements électriques et
électroménagers : télévision, lave-linge,
lave-vaisselle,
four à
micro-ondes ;
· Equipements dans les bâtiments : ascenseur,
système de surveillance, système d'éclairage ;
·
Équipements médicaux ;
·
Guichet automatique bancaire: parcmètres, distributeurs banque,
...
· Equipements bureautiques :
imprimante
multifonctions,
photocopieur, etc.
·
Informatique :
disque dur,
Lecteur de disquette,
etc.
·
Métrologie ;
· Militaire :
missile ;
·
Multimédia :
console de
jeux vidéo,
assistant
personnel ;
· Transport :
Automobile (camion,
machinisme agricole),
Aéronautique (
avionique),
Ferroviaire, etc.
· Etc.
1.7. Kit de développement pour systèmes
embarqués
Unkit de développement électronique pour
microcontrôleurs ou microprocesseurs embarqués est un ensemble
d'outils permettant aux développeurs de développer des
applications embarquées en électronique.
Un kit de développement est un environnement
simple de travail pour développer un prototype d'un produit
électronique ou concevoir un système qui répond
à un besoin précis. Ils sont en général
fournis avec :
· L'environnement de développement
intégré (IDE);
· Un guide d'utilisation du kit;
· Un manuel descriptif de l'architecture matériel
du kit (interfaces de communication, interfaces des E/S, ...);
· Des exemples initiations;
· Etc.
A quoi servent les kits de
développement?
Les kits de développement de processeur sont
utilisés comme outils pédagogiques, car ils sont flexibles lors
de l'utilisation et fournissent une bonne introduction au monde des processeurs
et des microcontrôleurs.
Les kits de développement peuvent également
former la base de n'importe quel projet. A partir de ces kits, il est possible
d'assembler des circuits pour une large gamme d'applications telles que
l'assemblage d'un réseau de caméras de surveillance domestique,
la diffusion des tout derniers programmes TV ou la commande d'un robot, ...
Description et caractéristiques de quelques
kits et cartes de développement
2. Kit de développement Arduino
Il s'agit d'un kit de développement électronique
basé autour d'un microcontrôleur Atmega du fabricant Atmel, dont
le prix est relativement bas pour l'étendue possible des
applications. Arduino est une plateforme open-source
embarquée basée sur un microcontrôleur (ATMEGA16U2 ou
8U2), une interface d'E/S et un environnement de développement des
différents périphériques du kit. Arduino peut
être utilisé pour développer des objets autonomes
interactifs ou peut être interfacé avec d'autres module Arduino
(Bluetooth, Wifi, Capteurs, ...). L'IDE open-source peut être
téléchargé gratuitement (Mac OS X, Windows et Linux).

Figure 11.8-1 Exemple de kit de
développementbasé sur Arduino Uno (starter Kit)
Caractéristiques du microcontrôleur
Atmega328
· C'est un microcontrôleur ATMEL de la famille AVR
8bits
· FLASH = mémoire programme de 32Ko
· SRAM = données (volatiles) 2Ko
· EEPROM = données (non volatiles) 1Ko
· Digital I/O (entrées-sorties) = 3 ports PortB,
PortC, PortD (soit 23 broches en tout I/O)
3. Carte de développement Raspebery Pi
Le Raspberry Pi est un micro-ordinateur monocarte à
processeur ARM conçu par le créateur de jeux vidéo David
Braben, dans le cadre de sa fondation Raspberry Pi2.
Cet ordinateur, qui a la taille d'une carte de crédit,
est destiné à encourager l'apprentissage de la programmation
embarquée; il permet l'exécution de plusieurs variantes du
système d'exploitation libre GNU/Linux et des logiciels compatibles. Il
est plus adapté aux applications à commande par internet
(télésurveillance à distance, serveur caméra,
contrôle et commande à distance, ...).
On peut pratiquement faire avec un Raspberry Pi tout ce que
l'on peut faire avec un ordinateur de bureau sous Linux, à
quelques exceptions près. Le Raspberry Pi utilise une carte SD
à la place d'un disque dur, bien que l'on puisse le brancher
à un disque dur USB. On peut modifier des documents bureautiques,
surfer surInternet, et jouer à des jeux. Le prix bas du Raspberry Pi
le destine particulièrement à être utilisé
comme media center. Il peut lire des vidéos et on peut l'alimenter
à partir du port USB que l'on trouve sur de nombreux
téléviseurs.
Caractéristiques (Model Pi 2)
· Processeur Broadcom BCM2836 Arm7 Quad Core
· Horloge du processeur 900MHz
· 1 Go de RAM
· 40pin GPIO
· 4 x 2 ports USB
· 4 pôles de sortie stéréo et port
vidéo composite
· Port HDMI
· Port d'appareil photo CSI pour connecter l'appareil
photo avec Raspberry Pi
· Port d'affichage DSI pour connecter l'écran
tactile avec Raspberry Pi
· Port Micro SD pour le chargement de votre
système d'exploitation et le stockage de données
· Source d'alimentation Micro USB
· Ethernet port 1 x 10/100
4. Carte de développement FPGA basée sur le
processeur Spartan 6 XC6SLX9
Un circuit logique programmable, ou réseau logique
programmable, est un circuit intégré logique qui peut être
reprogrammé après sa fabrication. Notons qu'il serait impropre de
parler de programmation au sens logiciel (contrairement à un
microprocesseur, il n'exécute aucune ligne de code).
Caractéristiques principales :
· Spartan 6 XC6SLX9 FPGA
· 84 E/S numériques
· 8 entrées analogique
· 8 LEDs (usage géneral)
· 1 LED pour montrer le bon fonctionnement de
FPGA
· Régulateur de tension 4.8-12V
· ATmega32U4 utilisé pour configurer FPGA,
USB, et lecture des entrées analogiques
5. Kit PIC Microchip
Préciser le PIC utilisé pour cette carte ou kite de
developpement.
Le kit de développement PIC32 constitue l'outil le plus
simple, efficace et de faible coût pour s'initier et la mise en oeuvre du
microcontrôleur PIC32.
Le kit est menu avec plus de 35 projets pour mieux
démarrer, les utilisateurs apprennent. Le kit comprend tout le
nécessaire pour développer, programme, déboguer et
exécuter du code sur un microcontrôleur PIC32 haute
performance.
Quelques performances du PIC32
· 200 MHz
· 2 Mo de mémoire Flash
· 512 Ko SRAM haute vitesse
· Ethernet/USB/CAN
· Contrôle embarquée multitâches
5.1. Famille de microcontrôleurs
Le Microcontrôleur (en
notation abrégée uc) est un Circuit programmable
capable d'exécuter un programme et qui possède des circuits
d'interface intégrés avec le monde extérieur. Un
microcontrôleur est donc un composant autonome, capable d'exécuter
le programme contenu dans sa mémoire morte dès qu'il est mis sous
tension. Selon les modèles et les conditions de fonctionnement, les
microcontrôleurs peuvent avoir besoin de quelques composants externes
(quartz, quelques condensateurs, parfois une ROM), mais ceci reste très
limité.
· la famille
Atmel AT91 ;
· les familles
ARM Cortex-M et
ARM Cortex-R
· la famille
Atmel AVR
(utilisée par des cartes
Wiring et
Arduino) ;
· la famille
Intel 8051, qui ne cesse
de grandir ; de plus, certains processeurs récents utilisent un
coeur 8051, qui est complété par divers
périphériques (ports d'E/S, compteurs/temporisateurs,
convertisseurs A/N et N/A,
chien de
garde,
superviseur
de tension, etc.) ;
· l'
Intel 8085, à
l'origine conçu pour être un microprocesseur, a en pratique
souvent été utilisé en tant que
microcontrôleur ;
· la famille des
PIC de
Microchip ;
· la famille des
dsPIC de
Microchip ;
· la famille
8080, dont les
héritiers sont le microprocesseur
Zilog Z80
(désormais utilisé en tant que contrôleur dans
l'embarqué) et le
microcontrôleur
Rabbit ;
· la famille
STM8 de
STMicroelectronics.
· Etc...
Conclusion
En somme, nés dans les années 70, les
systèmes embarqués sont de nos jours largement utilisés
dans de multiples domaines d'applications. Leur rôle est d'exercer une
tâche précise de manière autonome, sans intervention
humaine (car impossible ou trop risqué, par exemple). Souvent en temps
réel, le système possède également de nombreuses
autres contraintes : Espace mémoire, Sécurité, Puissance
CPU, Autonomie, dimensions physiques ...
Ils sont dans la majeure partie du temps composés
de :
· Capteurs qui relèvent des informations de
l'environnement extérieur.
· Systèmes de traitement de l'information à
base de microprocesseurs, microcontrôleurs et/ou ASIC dans lequel se
trouve la partie logicielle (généralement temps réel).
· Actionneurs qui permettent de retransmettre dans
l'environnement extérieur les décisions prises par la partie
logicielle.
Les systèmes embarqués ne sont pas des
systèmes ordinaires: ils requièrent une fiabilité
irréprochable du fait du coût faible de leur fabrication et de
leur production de masse.
Les familles de microcontrôleurs sont nombreuses, ce qui
prime dans Arduino, c'est sa simplicité qui permet de mettre en oeuvre
de nombreux objets numériques à moindre coût sans
être un spécialiste du fer à souder ou de la programmation
des microcontrôleurs. C'est cette qualité-là qui donne
à Arduino le succès planétaire qu'on lui connaît.
C'est ainsi que nous allons utiliser Arduino, pour
créer des systèmes électroniques plus ou moins complexes.
Il reste à savoir c'est quoi Arduino.
CHAPITRE 2 :
PRESENTATION MATERIELLE ET LOGICIELLE DE L'ARDUINO
Introduction
Comment faire des montages électroniques, simplement en
utilisant un langage de programmation ? La réponse, c'est le projet
Arduino qui l'apporte, celui-ci a été conçu pour
être accessible à tous par sa simplicité. Mais il peut
également être d'usage professionnel, tant les possibilités
d'application sont nombreuses. Ces cartes polyvalentes sont donc parfaites pour
les débutants qui veulent apprendre et progresser, grâce à
cette carte. Les différentes fonctions sont réalisées par
des capteurs par exemple pour la récupération des informations,
des actionneurs et IHM pour la transmission des ordres et informations vers le
monde extérieur.
2.1. Généralités sur l'Arduino
2.1.1. Définition
Une carte Arduino est une carte électronique qui ne
sait rien faire sans qu'on lui dise quoi faire parce qu'elle est programmable.
Donc elle a besoin d'un programme pour fonctionner. Comme toutes les cartes
à microcontrôleur, elle permet de piloter un système de
manière interactive à partir du programme que l'on aura
défini et mis dans sa mémoire. Le microcontrôleur peut
être
programmé
pour analyser et produire des
signaux
électriques, de manière à effectuer des tâches
très diverses comme la
domotique.
Arduino a été conçu pour l'enseignement
de l'électronique et de l'informatique. Il a été
conçu pour être accessible à tous les bricoleurs :
système pas cher, simple, ... mais performant.
2.1.2. Origine de l'Arduino
L'Arduino emprunte son nom au
Bar
di Re Arduino (en français « bar du '
roi
Arduin »), lieu de réunion des concepteurs de la carte,
à
Ivrée en
Italie du Nord. Une
équipe de développeurs composée de Massimo Banzi,
David Cuartielles, Tom Igoe, Gianluca Martino, David Mellis et
Nicholas Zambetti a imaginé un projet répondant au doux
nom de Arduino et mettant en oeuvre une petite carte
électronique programmable et un logiciel multiplateforme, qui puisse
être accessible à tout un chacun dans le but de créer
facilement des systèmes électroniques.
2.1.3. Exemples des applications
possibles
Il y a une infinité des applications possibles
réalisées grâce à Arduino. En voici une liste non
exhaustive :
· Contrôler les appareils domestiques,
l'éclairage, le chauffage, ...
· Gérer automatiquement l'ouverture d'une porte de
garage,
· Donner une intelligence à un robot,
· Réaliser de jeux de lumière,
· Envoyer un SMS quand le jardin est sec,
· Gérer le système d'arrosage à
distance,
· Permettre à un ordinateur de communiquer avec
une carte électronique et différents capteurs,
· Télécommander un appareil mobile
(modélisme),
· Etc...
Les cartes Arduino reposent sur un circuit
intégré (un mini-ordinateur appelé
également
microcontrôleur) associée à des
entrées et sorties qui permettent à l'utilisateur de
brancherdifférents types d'éléments externes :
v Des capteurs en entrée qui collectent des
informations sur leur environnement (de lumière, de température,
de position, de flamme, de fumé, ...),
v Des actionneurs ou organes de sortie qui agissent sur le
monde physique (moteurs, pompes, lampe, chauffage,...),
v Une alimentation (piles, panneaux solaires, ...),
v Des interfaces de dialogue (boutons, LEDs, écran,
...),
v Des interfaces de communication (réseau filaire,
réseau sans fil, ...),
v Etc.
2.1.4. Les types de cartes Arduino
Il y existe trois types de cartes Arduino?:
· Lesdites «?officielles?», qui sont
fabriquées en Italie par le fabricant officiel?: Smart
Projects.
· Lesdits «?compatibles?», qui ne sont pas
fabriqués par Smart Projects, mais qui sont totalement
compatibles avec les Arduino officielles.
· Les «?autres?», fabriquées par
diverses entreprises et commercialisées sous un nom différent
(Freeduino, Seeduino, Femtoduino,
Sanguino,
Uduino,
Diduino,...).
Elles sontgénéralement moins chères que les cartes Arduino
originales.
2.1.5. Les différentes versions
de la carte Arduino
Des cartes Arduino il en existe beaucoup?! Dix-sept versions
des cartes de type Arduino ont été produites et vendues.
a. Les cartes
UnoetDuemilanove.
Ces deux versions sont presque identiques.
Arduino Duemilanove utilise un Atmega168 et est
alimenté en électricité par le connecteur USB ou une
alimentation externe avec commutation automatique. La nouvelle versionest
équipée d'un ATmega328 (32 ko de flash, 2 ko de SRAM,
et 1 ko d'EEPROM).
 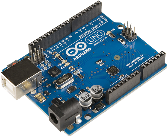
Figure 2.1-1 Carte Arduino
Duemilanove et Carte Arduino Uno
Arduino Uno utilise un ATmega328 comme les derniers
modèles de Duemilanove, mais alors que le Duemilanove utilisait une puce
FTDI pour la programmation via un connecteur USB, le Uno utilise une puce
ATmega8U2 programmée comme un convertisseur série.
[4]
b. La carte Arduino Leonardo
C'est la carte qui est prévue pour succéder
à la carte Arduino Uno en présentant des caractéristiques
équivalentes mais une ergonomie revue et une stabilité plus
éprouvée. Sa diffusion moins importante limite le support
utilisateur disponible sur le net.

Figure 2.1-2 carte Arduino
Leonardo
c. La carte Arduino Mega
La carte Arduino Mega est la carte la plus diffusée
après la carte Arduino Uno. Elle offre toutes les fonctionnalités
de cette dernière et un nombre d'entrées/sorties beaucoup plus
important (54 contre 14). Elle est équipée d'un ATmega1280 de
type CMS [5]pour avoir des entrées/Sorties
supplémentaires et de la mémoire (128 ko de flash, 8 ko SRAM et
4ko EEPROM).

Figure 2.1-3 carte Arduino
Mega
d. La carte Arduino Mega ADK
La carte Arduino méga ADK offre les mêmes
caractéristiques techniques que la carte Arduino méga mais son
port USB permet de la connecter avec un environnement Android ouvrant de
nouvelles perspectives d'interaction avec le monde des smartphones et des
capteurs dont ils sont dotés. Sa mise en oeuvre nécessite par
contre de solides connaissances en Java et la capacité à
développer ses propres applications.

Figure 2.1-4 carte Arduino Mega
ADK
e. La carte Arduino Due
La carte Arduino Due est une évolution de la carte
Arduino Méga et offre des performances réputées 3 fois
supérieures. Elle permet de manipuler rapidement des algorithmes lourds
particulièrement utiles dans le monde de la robotique par exemple.

Figure 2.1-5 Carte Arduino
Due
f. La carte Arduino Nano
La carte Arduino nano n'est ni plus ni moins qu'une carte
Arduino Uno miniaturisée. Sa taille et son poids réduits la
destinent à une utilisation dans des espaces réduits (en textile
par exemple) ou dans des applications de robotique ou de modélisme pour
lesquels le poids et la taille sont des facteurs déterminant
(hélicoptères, drones...)

Figure 2.1-6 Carte Arduino
Nano
g. La carte Arduino Mini Pro
La carte Arduino Mini Pro est une carte Arduino Uno
simplifiée à l'extrême permettant néanmoins de
piloter de petits projets ou certains éléments d'un projet.
Attention, cette carte n'intègre pas de port USB ce qui rends sa
connectivité délicate.
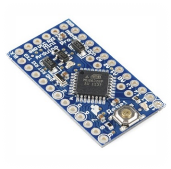
Figure 2.1-7 Carte Arduino Mini
Pro
h. La carte Arduino Yun
La carte Arduino Yun, récemment proposée par
Arduino, est conçue pour contrer les avantages de la carte Raspberry.
Elle est un dérivé de la carte Leonardo et a pour objectif de
combiner la puissance de Linux avec la facilité d'utilisation d'une
carte Arduino. Elle est également la première carte Arduino
à être dotée nativement d'un wifi intégré
etc.

Figure 2.1-8 Carte Arduino
Yun
2.1.6. Autres cartes
Il existe encore beaucoup d'autres cartes dont voici
certaines :
Ø Arduino Ethernet : est une carte Arduino UNO
intégrant un chip Wiznet W5100 pour rajouter la connectivité
Ethernet intégré.
Ø Arduino Bluetooth(BT) : programmable via une
connexion
Bluetooth et utilisant un
ATmega 328.
Ø Serial Arduino : programmé avec une
connexion série par connecteur
DB9 et utilisant un
ATmega8.
Ø Arduino Extreme : programmable via une connexion
USB et utilisant un ATmega8.
Ø LilyPad Arduino : une conception de type
minimaliste pour permettre une application portable utilisant un ATmega168 de
type
CMS,
cette carte se remarque par son vernis violet.
Ø Arduino NG : programmable via une connexion USB
et utilisant un ATmega8.
Ø Arduino NG plus : programmable via une connexion
USB et utilisant un ATmega168.
Ø Arduino Diecimila : possède une interface
USB et utilise un ATmega168 dans un boitier format DIL28. (16 ko flash,
1 ko SRAM, 0,5 ko EEPROM)
Ø Arduino MKR : est une famille de cartes au
format réduit, destinée à l'
IoT : la
carte est déclinée sous plusieurs déclinaisons, disposant
chacun d'une fonctionnalité de connectivité IoT
différente:
Sigfox,
LoRa,
Wi-Fi, etc.
Ø Etc.
2.1.6. Dérivées de
l'Arduino
Plusieurs cartes Arduino ont été produites par
d'autres fabricants, elles sont donc compatibles avec les Arduino officielles.
Il existe aussi des cartes Arduino ou compatible modifiées pour un usage
spécifique : par exemple, des cartes de contrôle pour
imprimantes 3D
RepRap, des systèmes
de pilote automatique pour drones comme les systèmes ArduPilot,
APM:Plane et
APM:Copter, ou les
cartes FlyDuino, enfin des puces
Wi-Fi tierces comme l'
ESP8266 compatibles avec
l'environnement Arduino.
2.1.7. Avantages
Le système Arduino simplifie la façon de
travailler avec les microcontrôleurs, tout en offrant plusieurs avantages
pour les enseignants, les étudiants et les amateurs
intéressés par les autres systèmes :
· Pas cher : les cartes Arduino sont relativement
peu couteuses comparativement aux autres plateformes.
· Multiplateforme : le logiciel Arduino,
écrit en Java, tourne sous les systèmes d'exploitation Windows.
Linux et Mac OS. La plupart des systèmes à microcontrôleurs
sont limités à Windows.
· Un environnement de programmation clair et
simple : l'environnement de programmation Arduino est facile à
utiliser pour les débutants, tout en étant assez flexible pour
que les utilisateurs avancés puissent en tirer profit
également
· Logiciel open Source et extensible : le logiciel
Arduino et le langage Arduino sont publiés sous licence open source,
disponible pour être complété par des programmeurs
expérimentés.
· Le langage peut être aussi étendu à
l'aide de librairies C++, et les personnes qui veulent comprendre les
détails techniques peuvent reconstruire le passage du langage Arduino au
langage C pour microcontrôleur AVR sur lequel il est basé.
· Matériel open source et extensible : les
cartes Arduino sont basé sur les microcontrôleurs Atmel ATMEGA8,
ATMEGA168, ATMEGA328, etc.
2.2. Etude de la partie matérielle
Comme nous l'avons mentionné là-haut, Arduino
est une plate-forme de prototypage d'objets interactifs à usage
créatif constituée d'une carteélectronique et d'un
environnement de programmation, Cet environnement matériel et
logicielpermet à l'utilisateur de formuler ses projets par
l'expérimentation directe avec l'aide denombreuses ressources
disponibles en ligne.
2.2.1. Une carte électronique
Une carte électronique est un support
plan, flexible ou rigide, généralement composé de fibre de
verre. Elle possède des pistes électriques disposées sur
une, deux ou plusieurs couches (en surface et/ou en interne) qui permettent la
mise en relation électrique des composants électroniques. Chaque
piste relie tel composant à tel autre, de façon à
créer un système électronique qui fonctionne et qui
réalise les opérations demandées.

Figure 2.2-1 Exemple de carte
électronique: Arduino Severino
Évidemment, tous les composants d'une carte
électronique ne sont pas forcément reliés entre eux. Le
câblage des composants suit un plan spécifique à chaque
carte électronique, qui se nomme le schéma
électronique.
2.2.2. Un circuit programmable
La carte Arduino est une carte qui ne sait rien faire sans
qu'on lui dise quoi faire, c'est dû au fait qu'elle est programmable.
Cela signifie qu'elle a besoin d'un programme pour fonctionner.
Une carte programmable est une carte sur laquelle est
intégré des
composants
électronique dont un ou plusieurs microcontrôleurs. Le
microcontrôleur permet de contrôler la carte avec un
programme
informatique. Ce programme peut être écris en divers
langages de
programmation.
Sans programme la carte programmable ne peut pas fonctionner.
Vous devez donc relier votre carte à un ordinateur pour y injecter un
programme. Une
fois le programme dans la carte, vous pouvez l'utiliser en toute autonomie sans
ordinateur.
2.3.Etude de la partie
logicielle
Cette partie est dédiée à la
représentation des plateformes informatiques utilisées dans
ledéveloppement des systèmes embarqués.
2.3.1. Outils et logiciels
Arduino IDE : L'interface de
l'IDE Arduino est plutôt simple, il offre une interface minimale et
épurée pourdévelopper un programme sur les cartes Arduino.
Il est doté d'un éditeur de code avec colorationsyntaxique et
d'une barre d'outils rapide. Ce sont les deux éléments les plus
importants de l'interface. On retrouve aussi une barre de menus, plus classique
quiest utilisé pour accéder aux fonctions avancées de
l'IDE. Enfin, une console affichant les résultats dela compilation du
code source, des opérations sur la carte, etc.
 
Figure 2.3-1 Interface du
logiciel Arduino
Le logiciel Arduino est un environnement de
développement opensource et gratuit, téléchargeable sur le
site officiel Arduino, comme le montre la figure 2.4-1, cet IDE
dédié aux cartesArduino permet :
Ø D'éditer un programme : des croquis
(sketch en Anglais),
Ø De compiler ce programme dans le langage «
machine » de l'Arduino,
Ø De téléverser le programme dans la
mémoire de l'Arduino,
Ø De communiquer avec la carte Arduino grâce au
terminal.
2.3.2. Langages de programmation
qu'acceptent les arduino
· Langage Arduino : le langage utilisé par le
logiciel Arduino pour programmer le
microcontrôleur est basé
sur les langages C/C++.
· Si vous ne pouvez pas écrire du C/C++, il est
possible d'utiliser un langage interprété soit directement sur la
carte, soit sur un autre ordinateur qui communique avec Arduino. Il existe en
effet quelques implémentations de langages interprétés
pour l'Arduino, y compris plusieurs ports de Forth sur Arduino, un port de Tiny
BASIC, PyMite (un sous-ensemble de Python), et un langage dédié
appelé Bitlash. Ces langages peuvent être exécutés
directement sur Arduino.
· Cependant, la plupart des langages de script dynamiques
modernes sont trop complexes pour tenir dans la RAM et la mémoire de
programme très limitées de l'Arduino. Les langages qui entrent
dans cette catégorie sont : Java, PHP, Perl, Batch, Shell, Ruby,
JavaScript, Python. Vous pouvez utiliser ces langues pour communiquer avec
Arduino, mais en général, le code dans ces langages ne
fonctionnera pas directement sur la carte.
Conclusion
Pour finir, Arduino est une plate-forme de prototypage rapide
: un ensemble d'outils développés pour faciliter la conception de
montages à base de microcontrôleurs, sans perdre trop de temps
à en apprendre les tenants et aboutissants.
Les circuits à microcontrôleurs, grâce
à la grande facilité de leur mise en oeuvre et la diminution de
leur coût sont de plus en plus fréquemment employés et
remplacent avantageusement les circuits électroniques classiques.
La plate-forme Arduinocomporte :
· Du matériel : une collection de cartes à
microcontrôleurs,
· Du logiciel: permettant la programmation, la
communication et intégrant de nombreuses bibliothèques de
fonctions,
· Unsite Internet : information,
téléchargements, documentation, forums, ...
Il en existe plusieurs variétés de la carte dont
nous avons énumérer quelques-unes ; nous avons
travaillé avec la Uno que nous allons beaucoup plus parler en
détail plus loin dans le chapitre quatre. Voyons d'abord en gros combien
ces cartes ont un rôle important à jouer dans l'automatisation de
nos maisons et notre confort. Parlant du confort et de l'automatisation, nous
faisons directement allusion à la domotique que nous allons voir dans le
chapitre qui suit.
CHAPITRE 3 :GENERALITES
SUR LA DOMOTIQUE
3.1 Introduction
Les premières applications de la domotique sont
apparues au début des années 1980. Elles sont nées de la
miniaturisation des systèmes électroniques et informatiques. Le
développement des composants électroniques dans les produits
domestiques a amélioré les performances tout en réduisant
les coûts de consommations en énergie des équipements.
La domotique appelée également parfois
smart home, ou smart house, ou maison
connectée, ou encoremaison
« intelligente », sont des termes de plus en plus
à la mode. Pourtant, pour beaucoup encore, ce terme reste obscur. Il
faut dire que la domotique englobe énormément de choses. La
question est donc légitime : la domotique, c'est
quoi ?
3.2. Définition de la domotique
Le mot domotique a été introduit dans le
dictionnaire « le petit Larousse » en 1988.
Ce mot vient du mot latin
« Domus » qui
signifie « domicile », et du suffixe
« tique » qui fait
référenceàla technique.
Wikipédiadéfinitla domotique
comme étant l'ensemble des techniques de l'électronique, de
physique du bâtiment, d'automatisme, de l'informatique et des
télécommunicationsutilisées dans les bâtiments, plus
ou moins « interopérables » et permettant de
centraliser le contrôle des différentssystèmes et
sous-systèmes de la maison et de l'entreprise (chauffage, volets
roulants, porte de garage, portail d'entrée, prises électriques,
etc.).
La domotique vise à apporter des solutions techniques
pour répondre aux besoins de confort, de sécuritéet de
communication que l'on peut retrouver dans les maisons, les hôtels, les
lieux publics, etc.
3.3.Technologies de la
domotique
Dans le cadre d'une utilisation à l'échelle d'un
habitat, la domotique concerne trois technologies :
· La technologie par réseau sans fil (Wifi, ondes
radio, ...) ;
· Latechnologie CPL ou à courant porteur
(appelé X10) ;
· Et la technologie par réseau câblé.
3.2.1. La domotique sans fil
La domotique sans fil utilise plusieurs supports
technologiques : les ondes radio (sur desfréquences en MHz) et
l'infrarouge, qui a pour inconvénient de ne pas traverser les murs.
Cette technologie permet le contrôle de tous les équipements
électriques de l'habitation. Fiable, elle est rapidement
opérationnelle et occasionne peu de pollution
électromagnétique.
Il estconseillé, pour une meilleure stabilité du
système, de ne pas mixer le sans-fil avec un autre type detechnologie,
le CPL par exemple. Cela peut nuire à l'installation et à la
qualité de la communicationentre les équipements.
La domotique sans fil utilise plutôt les ondes
électromagnétiques pour transmettre des données
enutilisant l'air comme canal de transmission:
· L'émetteur applique une certaine variation de
courant à son antenne.
· La variation de courant induit une onde
électromagnétique.
· L'onde électromagnétique se propage
à une vitesse proche de celle de la lumière dans l'air.
· Un courant électrique est induit dans l'antenne
du récepteur par la variation de champsmagnétique.
· Le récepteur lit la variation de courant et
l'interprète selon le protocole de communication utilisé.
On trouveparmi les protocoles sans fil :
a. Infrarouge
La technologie infrarouge utilise les longueurs d'ondes plus
longues dans la
zone rouge du spectre électromagnétique qui se
situent au-delà du champ de vision humain.
La technologie infrarouge
est utilisée par la télécommande d'un
téléviseur. Elle est peu
coûteuse et facile à
intégrer dans les périphériques par les fabricants, mais
elle présente
quelques inconvénients : Diminution des
performances selon la distance, seulement deux
périphériques
peuvent communiquer l'un avec l'autre et blocage possible de la
transmission
du signal avec les obstacles (personnes, murs, plantes,
etc.).
b. Bluetooth
C'est un protocole sans fil d'échange de données
sur de courtes distances entredes périphériques fixes et mobiles.
Elle permet de connecter plusieurs périphériques
enrésolvant les problèmes de synchronisation. La norme BLUETOOTH
est automatique,économique et présente une portée de
transmission des données plus étendue par rapport
àl'infrarouge.
c. Zigbee
C'est une technologie sans fil radio, de basse puissance et de
bas débits (en dessousde 150 kbps). Sa portée est variable. Elle
oscille suivant l'environnement entre 10 et 50mètres en
intérieur. L'avantage majeur de Zigbee est que la technologie est
peuconsommatrice en énergie. Elle peut, de plus, être
intégrée à bas coût dans les équipements.Il
présente quelques inconvénients : Débit très bas,
les signaux ne sont pas directementcompatibles avec des systèmes «
évolués » tels qu'ordinateurs, tablette ou smartphone. Il
estdonc nécessaire d'utiliser une Gateway qui sera connecté d'une
part au réseau maillé etd'autre part au réseau local via
Wifi ou un câble Ethernet.
d. Wifi
C'est une technologie de réseau informatique sans fil
mise en place pour fonctionneren réseau interne et, depuis, devenue un
moyen d'accès à haut débit à Internet. En
pratique,pour un usage informatique du réseau Wi-Fi, il est
nécessaire de disposer au minimum dedeux équipements Wi-Fi, par
exemple un ordinateur, et un point d'accès ADSL.Nous résumons
dans ce tableau une comparaison entre les différentes technologies :
Tableau 1 Comparaison entre les
différents protocoles sans fil [6]
|
Wifi
|
Bluetooth
|
Zigbee
|
Infrarouge
|
|
Débit
|
>100 Mb/s
|
< 3 Mb/s
|
< 250 Kb/s
|
10 Mb/s
|
|
Portée
|
~ 300m
|
~ 100m
|
~ 1km (beaucoup plus grâce au maillage réseau)
|
~30m
|
|
Nombre de noeuds
|
32
|
7
|
65 000 +
|
|
|
Besoin mémoire
|
1 Mb
|
250 Kb +
|
4 - 32 Kb
|
|
|
IEEE
|
802.11.a/b/g/n
|
802.15.1
|
802.15.4
|
|
3.2.2. La domotique à courant porteur
CLP
L'utilisation de la domotique à courant porteur revient
à transformer son habitat en maison communicante par le biais d'une
installation domotique; c'est-à-dire que la technologie CPL utilise le
réseau électrique du domicile déjà existant pour
transmettre les informations entre les appareils et les unités de
commande. Ainsi, chaque prise reçoit les données qui lui sont
destinées pour une gestion simplifiée et un coût
d'installation réduit.
La domotique CPL est aussi connue sous l'acronyme de X10, qui
est un protocole de communication et de contrôle de plusieurs appareils
domotiques, X10 reste le protocole le moins cher dans le domaine des
automatismes résidentiels.
Les CPL offrent la possibilité de faire passer de
l'information numérique (voix, donnée, image) sur leréseau
électrique ordinaire. Ils s'avèrent très utiles en cas de
rénovation.
L'intérêt de cette technologie porte sur
l'utilisation d'un réseau filaire structuré déjà
existant etparfaitement distribué dans toute la maison ou le
bâtiment : le réseau électrique et ses points
d'accèsconstitués par les prises électriques.Toutefois, la
fiabilité de la domotique CPL est contestable. Cette technologie peut
parasiter le réseau etperturber les autres transmissions. De plus, cet
équipement est encore coûteux. À
performanceséquivalentes, il est en effet plus cher que le sans-fil.
Enfin, ce système est aussi moins rapide, et il n'apas de
mobilité par construction.
3.2.3. La domotique câblée
La technologie par réseau câblé est bien
plus fiable encore grâce à son insensibilité face aux
perturbations électromagnétiques. Le réseau permet
d'interconnecter tous les appareils de la maison plus facilement, mais son
installation nécessite généralement des travaux et
s'avère plus longue. Elle est conseillée plutôt dans
constructions neuves.
Certains professionnels ne sont pas favorables, au sein d'une
installation domotique, aux approchessans fil ou CPL. Ils leur
préfèrent une domotique par câbles. Le
pré-câblage doit être souple et évolutif, car la
technologie ne cesse d'évoluer.Il faut ainsi prévoir un local
technique, le « local de répartition », qui centralise les
points d'arrivée detoutes les liaisons externes
(électricité, téléphone, Internet,
télévision, fibre optique ...).
Dans les logements, le Bus de terrain KNX est une excellente
solution domotique. Ce Bus est constitué d'un câble fait de
conducteurs torsadés par paires (deux au minimum) alimenté en
très basse tension(courant faible).
Le réseau a pour but d'empêcher les
interférences électriques reprochées au CPL. Cependant,
toutrepose sur la qualité des câbles choisis.
Trois types de câbles sont fréquemment
rencontrés, le câble UTP, le câble STP et le câble
FTP. Lesmeilleurs câbles sont blindés ou écrantés,
de type STP ou FTP.

Figure 3.3-1
Représentation graphique schématique d'items relatifs à l'
« habitat intelligent » (version évoluée de la
domotique des années 1970-80), avec leurs relations entre eux et
l'usager.[7]
3.3. Domaines d'application de la domotique
La domotique peut s'adapter à plusieurs types de
domaine. Les principaux domaines dans lesquels s'appliquent les techniques de
la domotique sont :
· Le pilotage des appareils
domestiquesélectroménagers par la programmation d'horaires
définis par l'usager.
· La gestion de l'énergie, du chauffage, de la
climatisation, de la ventilation, de l'éclairage, de l'eau (les robinets
de lavabos peuvent ouvrir l'eau à l'approche des mains, etc.) ;
· La sécurité des biens et des personnes
(alarme, détecteur de mouvement, etc.) ;
· Le confort de l'habitat (home cinéma, gestion
des lumières, etc.) ;
· L'assistance aux personnes handicapées ou aux
personnes âgées.
La domotique concerne les résidences individuelles,
mais aussi les logements collectifs et les bureaux. Dans ces deux derniers cas,
on parle plutôt d'Immotique, qui est l'application de la domotique aux
grands bâtiments et aux immeubles.
3.4. Avantages de la domotique
La domotique nous offre des nombreux avantages, en voici les
principaux :
a. La domotique apporte du confort
Selon le dictionnaire Petit Robert,
« Confort » est un nom masculin signifiant tout ce qui
contribue au bien-être, à la commodité de la vie
matérielle. Le confort d'un appartement par exemple.
Aujourd'hui, une maison intelligence est capable de savoir
quand vous rentrez à la maison (grâce à votre smartphone
par exemple), et donc d'ouvrir le portail avant même que vous n'arriviez.
Les volets peuvent s'ouvrir et se fermer au rythme du soleil, et peuvent
même aller jusqu'à s'adapter à la saison et la
température pour laisser entrer la lumière et la chaleur du
soleil l'hiver, ou au contraire conserver le frais l'été en
fermant les volets des fenêtres exposées au soleil. De la
même façon, votre maison sait quand vous êtes
présent, et peut ainsi adapter elle-même votre chauffage pour que
la maison soit toujours à la température idéale pour vous.
Il est même possible de diffuser automatiquement votre playlist musicale
préférée à votre réveil, ou quand vous
rentrez à la maison. Pendant ce temps, un robot peut passer l'aspirateur
dans la maison à votre place, et le système d'arrosage
automatique arrosera votre jardin, tout en tenant compte des prévisions
météo des prochains jours, histoire de ne pas arroser
inutilement.
b. La domotique permet des économies
d'énergie
La domotique permet d'optimiser vos dépenses
d'énergie par l'automatisation et la programmation d'appareils et de
gérer ainsi les sources d'énergie de votre domicile. Chauffage,
climatisation, éclairage, ouverture et fermeture des stores,
température et remplissage de l'eau, chargement des appareils
fonctionnant sur batterie, etc. Tout est conçu pour vous faciliter la
vie, tenir votre maison prête et confortable pour votre arrivée
tout en vous permettant de réaliser des économies en programmant
ces actions pour qu'elle s'exécutent seulement en cas de besoin.
Grace à un ensemble de capteurs placés à
l'intérieur et à l'extérieur de la maison, le simple fait
d'activer l'alarme en partant va passer le chauffage en mode économie,
et éteindre toutes les lampes et les appareils restent en veille,
réduisant ainsi la consommation d'énergie en votre absence.
Cette gestion s'étend même jusqu'au jardin,
puisqu'il vous est possible de contrôler et de programmer votre
système d'arrosage à distance, par internet depuis votre
smartphone, votre ordinateur ou votre tablette.
c. La domotique apporte de la
sécurité
Le système de contrôle et de surveillance de la
maison déclenche une alerte automatique en cas de tentative d'intrusion
ou de problèmes (liés à la fumée, fuite d'eau, gaz,
etc.) via un SMS ou un mail qui peut vous être adressé, ainsi
qu'à un commissariat, au pompier, à une personne proche, ... en
fonction de directives préétablies. L'alarme peut
également se faire via une sirène et éventuellement un
flash lumineux en cas de tentative d'intrusion.
La sécurité de la maison, c'est également
la sécurité des personnes : en cas de détection
d'incendie, par exemple, il est tout à fait possible de
déclencher une alarme, d'ouvrir automatiquement les volets,
déverrouiller les portes, et éclairer le chemin de la sortie pour
faciliter l'évacuation ; en cas de détection de fuite d'eau
il est également possible de couper automatiquement l'arrivée
d'eau afin d'éviter de gros dégâts, ainsi de suite.
3.5. La communication de la maison avec le monde
extérieur
Un système domotique permet la communication non
seulement à l'intérieur de la maison, maisaussi à
l'extérieur. D'où pour fonctionner, un système automatique
doit pouvoir acquérir des informations en provenance de l'utilisateur
mais aussi du système lui-même ou encore de son environnement. Il
va ensuite les traiter afin de transmettre des ordresà la chaîne
d'énergie par exemple.
La technologie Internet interviendra de plus en plus pour la
commande à
distance par certains utilisateurs. Vous ne devez
même pas être à la maison pour commander
vos appareils.
Un simple coup de fil ou un sms vous permettra par exemple de régler
le
chauffage à distance, d'activer une simulation de présence
etc.
Conclusion
Toutes les fonctions et applications décrites dans ce
chapitre apportent confort et bien-être. Le fait que nos maisons soient
en outre plus sûres, capables de communiquer et dotées d'un
minimum d'autonomie est également à considérer. Si, de
surcroît, l'investissement initial permet de faire évoluer
l'installation à moindre frais et de limiter les coûts
d'exploitation,
choisir de rendre sa maison intelligente apparaît
comme un choix judicieux, et non plus comme un luxe.
Encore faut-il que les aspects purement technologiques
laissent la place à une simplicité d'utilisation pour tous. Le
succès de l'intégration des nouvelles technologies passe par une
bonne conception en amont, le choix de solutions standardisées, une
adéquation
des solutions aux attentes des utilisateurs et un
accompagnement dans la prise en main des systèmes.
Avant de
détailler les fonctions disponibles dans notre système de
commande, nous introduisons dans le chapitre suivant la façon de les
mettre en oeuvre.
CHAPITRE 4 : CONCEPTION
ET REALISATION D'UN SYSTEME DE COMMANDE A DISTANCE D'UNE MAISON INTELLIGENTE A
BASE D'ARDUINO
4.1. Présentation du cahier de charge
L'objectif de notre travail est de concevoir une maison
didacticiel pour établir les fonctions de la domotique suivantes :
Ø Gestion d'ouverture sécuriséepar code
de la porte principale. L'ouverture étant assurée par un
servomoteur. Et si un code incorrect est tapé trois fois, l'alarme de la
maison se déclenche automatiquement.
Ø Gestion d'éclairage assurée par
l'intermédiaire de l'application web
Ø Acquisition de la température et
humidité par le capteur DHT11 puis affichage de ces données sur
écran LCD et sur une page web de la maison.
Ø Contrôle d'incendie par le capteur de flamme
puis déclenchement automatique de l'alarme en cas de détection de
la flamme.
Ø La commande des organes du système domotique
sera faite par la liaison de l'interface graphique de la page web de la maison
et le wifi via un module Ethernet monté avec la carte de commande.
Le schéma synoptique suivant va nous permettre de mieux
comprendre le fonctionnement global du système étudié
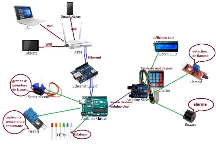
Figure 4.1-1 Schéma
synoptique du système à réaliser
4.2. Outils utilisés
pour le développement du système de commande
Dans cette partie, nous allons détailler l'ensemble des
outils matériels et logiciels qui nous ont
permis de mettre en place
le système commandé réalisé dans ce travail.Nous
nous étalerons principalement sur la carte Arduino Uno, ainsi que
l'ensemble des actionneurs et des capteurs que nousavons pu intégrer
dedans.
4.2.1. Carte Arduino Uno
Arduino Uno est une carte à
microcontrôleur basée sur l'ATmega328P. Il possède 14
broches d'E/S numériques, 6 entrées analogiques, un quartz 16
MHz, une connexion USB, une prise d'alimentation, un en-tête ICSP et un
bouton de réinitialisation.Il contient tout le nécessaire pour
prendre en charge le microcontrôleur.
Pour démarrer, on a besoin de connecter la carte de
commande sur un ordinateur via un câble USB, ou bien tout simplement la
connecter sur une batterie d'alimentation.
Vous pouvez bricoler votre UNO sans trop vous soucier de
faire quelque chose de mal, dans le pire des cas, vous pouvez remplacer le puce
pour quelques dollars et recommencer.
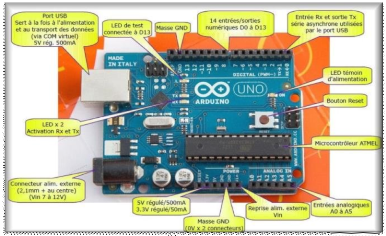
Figure 4.2-1 la carte Arduino
Uno[8]
"Uno" signifie « un » en italien
et a été choisi pour marquer la sortie de Arduino Software (IDE)
1.0.La carte Uno et la version 1.0 du logiciel Arduino (IDE) étaient les
versions de référence d'Arduino, qui ont maintenant
évolué vers de nouvelles versions.La carte Uno est la
première d'une série de cartes USB Arduino et le modèle de
référence pour la plate-forme Arduino.
5. Spécifications techniques
Parmi ses caractéristiques matérielles, on
trouve :
Tableau 2Présentation des
caractéristiques de la carte Arduino Uno
|
Catégorie
|
Valeur
|
|
Microcontrôleur :
|
ATmega328P
|
|
Tension de fonctionnement :
|
5V
|
|
Tension d'entrée :
|
7-12 V
|
|
Broches d'E /S numériques
|
14
|
|
Broches E /S numériques PWM
|
6
|
|
Broches d'entrée analogiques
|
6
|
|
Mémoire flash
|
32 Ko (ATmega328P)
|
|
SRAM
|
2 Ko
|
|
EEPROM
|
1 Ko
|
|
Vitesse de l'horloge
|
16 MHz
|
|
LED_BUILTIN
|
Connectée à la pin 13
|
|
Longueur
|
68.6 mm
|
|
Largeur
|
53.4 mm
|
|
Poids
|
25g
|
6.Fonctions générales des broches
a. Alimentation
L'Arduino Uno peut être alimentée via la
connexion USB ou avec une alimentation externe.
Dans le premier cas, la
source d'alimentation est automatiquement
sélectionnée.
Externe (non-USB) alimentation peut provenir
d'un adaptateur AC-DC ou batterie.
Les broches d'alimentation sont les suivants :
· Vin pour accueillir la tension
d'entrée positive lorsque la carte Arduino est utilisée avec une
source detension externe.
· 5V,Cette broche délivre une
tension de 5V régulée utilisée pour faire fonctionner le
microcontrôleur et les autrescomposants de la carte.
· 3.3V, il s'agit d'une
alimentationfournie par le circuit intégré FTDI (circuit
intégré faisant l'adaptation du signal entre le port USB de votre
ordinateur et le port série del'ATmega) de la carte. L'intensité
maximale disponible sur cette broche est de 50mA.
b. Mémoire
La carte Arduino Uno a 32 Ko de mémoire FLASH pour
stocker le programme. Elle a également 2 ko de mémoire SRAM
(volatile) et 1 Kod'EEPROM (non volatile - mémoire qui peut être
lue à l'aide de la librairie EEPROM.h).
c. Entrées et sorties
numériques
Chacune des 14 broches numériques de la carte Arduino
Uno peut être utilisée comme entrée numérique ou
sortie numérique à l'aide des fonctions pinMode () et
digitalRead () du langage Arduino.Ils fonctionnent en 5
volts.Chaque broche peut fournir ou recevoir un maximum de 20 mA
d'intensité dans les conditions de fonctionnement recommandées et
possède une résistance de tirage interne
(déconnectée par défaut) de 20 à 50 000 ohms
(20-50KÙ). Cette résistance interne s'active sur une broche en
entrée à l'aide de la fonction digitalWrite (broche, HIGH).
De plus, certaines broches ont des fonctions
spécialisées:
Tableau 3 Différentes
broches entrées/Sorties numériques
|
Communication Série
|
ü Port serie serial 0 : 0 (RX) ;
ü Port serie serial 1 : 1 (TX).
Utilisé pour recevoir (RX) et transmettre (TX) des
données séries de niveau TTL.
Les broches 0 (RX) et 1 (TX) sont connectées aux
broches correspondantes du circuit intégré ATmega8U2
programmé en convertisseur USB-vers-Serie de la carte.
|
|
Interruptions externes
|
ü Broche 2
ü Broche 3.
Ces broches peuvent être configurées pour
déclencher une interruption sur une valeur basse, un front montant ou
descendant ou un changement de valeur. (Voir la fonction attachInterrupt
()).
|
|
Impulsion PWM (Modulation de la Largeur d'Impulsion MLI)
|
ü Broche 3,
ü Broche 5,
ü Broche 6,
ü Broche 9,
ü Broche 10 et
ü Broche 11
Peut fournir une sortie PWM 8 bits à l'aide de la
fonction analogWrite ().
|
|
SPI (Interface Série Peripherique)
|
ü Broche 10 (SS),
ü Broche 11 (MOSI),
ü Broche 12 (MISO),
ü Broche 13 (SCK).
Ces broches prennent en charge la communication SPI à
l'aide de la bibliothèque SPI.
|
|
I2C
|
ü Broche A4 (SDA) et
ü Broche A5 (SCL).
Supportent les communications de protocole I2C (ou interface
TWI (2 fils), disponible en utilisant la libraire Wire/I2C
(Twi :Two-Wire-Interface « 2 fils »).
|
|
LED
|
ü Broche 13
Il y a une LED intégrée dans la carte
connectée à la broche numérique 13. Lorsque la broche est
au niveau HAUT, la LED est allumée, lorsque la broche est au niveau BAS,
la LED est éteinte.
|
d. Broches analogiques
La carte Arduino Uno dispose de 6 entrées analogiques
portant l'indication de A0 à A5, offrant chacune une résolution
de 10 bits à l'aide de la très utile fonction analogRead ()
du langage Arduino. Par défaut, ces broches mesurent entre la masse
et le 5 volts, mais il est possible de modifier l'extrémité
supérieure de leur plage de mesure à l'aide de la broche AREF et
de la fonction analogReference () du langage Arduino.
Note : les broches analogiques peuvent
être utilisées en tant que broches numériques.
e. Autres broches
Il y a trois autres broches disponibles sur la carte Arduino
Uno :
· IOREF : Cette broche de la carte
Arduino fournit la référence de tension avec laquelle le
microcontrôleur fonctionne.Un blindage correctement configuré peut
lire la tension des broches IOREF et sélectionner la source
d'alimentation appropriée ou permettre aux convertisseurs de tension sur
les sorties de fonctionner avec 5V ou 3,3V.
· AREF (référence
analogique): Tension de référence pour les entrées
analogiques (si différent du 5V). Utilisée avec la fonction
analogReference ().
· RESET ou Réinitialiser :
Mettre cette broche au niveau BAS entraine la réinitialisation (ou le
redémarrage) du microcontrôleur. Généralement
utilisée pour ajouter un bouton de réinitialisation sur le
circuit qui bloque celui présent sur la carte.
f. Communication
La carte Arduino Uno dispose d'un certain nombre
d'installations pour communiquer avec un ordinateur, une autre carte Arduino ou
avec d'autres microcontrôleurs.L'ATmega328 fournit une communication
série UART TTL (5V), disponible sur les broches numériques 0 (RX)
et 1 (TX).
Un ATmega16U2 sur la carte canalise cette communication
série sur USB et apparaît comme un port de communication virtuel
pour le logiciel sur l'ordinateur.Le micrologiciel 16U2 utilise les pilotes COM
USB standard et aucun pilote externe n'est nécessaire.Cependant, sous
Windows, un fichier .inf est requis.
Le logiciel Arduino (IDE) comprend un moniteur série
sur l'ordinateur et qui sert d'interface pour échanger de simples
données textuelles vers et depuis la carte.Les voyants RX et TX de la
carte clignotent lors de la transmission de données via le port USB vers
série et la connexion USB à l'ordinateur (mais pas pour la
communication série sur les broches 0 et 1).Une bibliothèque
SoftwareSerial permet la communication série sur n'importe laquelle des
broches numériques de l'Uno.
5.2.1. Module Ethernet Shield
Le ShieldArduinoEthernet est un
module Arduino additionnel aux cartes Uno, DuemilanoveouMega
qui permet de les rendre communicantes sur un réseau
filaireEthernet.
On pourra ainsi créer une Interface
Homme Machine (IHMou HMI) pour piloter
à distance ou visualiser l'état de notre carte
Arduinoen utilisant un câble réseau relié à une box
internet.

Figure 4.2-2 le module Ethernet
Shield HanRun HR11105A 17/32
Le module Ethernet est composé de :
· Un Port Ethernet.
· Une circuit intégréWiznet
W5100 supportant le protocole TCP/IP et 4
connexionsen même temps.
· Un emplacement pour carte Micro SD
pour y stocker ou envoyer des données.
· Des borniers embrochables déportés de
votre carte Arduino.
· 7LEDs permettant d'afficher les
informations :
o TX : s'allume lors d'une transmission
de données,
o RX : s'allume lors d'une
réception de données,
o COLL : s'allume lors d'une collision
sur le réseau,
o FULLD : s'allume lorsque la connexion
réseau est en Full duplex,
o LINK : s'allume lorsqu'un
réseau est connecté et clignote lors de l'échange de
données,
o 100M : s'allume lorsque la
connexion est en 100Mbits/s.
o PWR : s'allume lorsque l'alimentation
de la carte est présente.
5.2.2. Servomoteur
Pour motoriser la porte principale, on a pensé à
utiliserun servomoteur vu de sa souplesse et sa simplicité de
commande.
Les servomoteurs servent en principe à actionner les
parties mobiles d'un système. Ils sont prévuspour être
commandés facilement en position ou en vitesse. En effet, ils sont
équipés d'un systèmed'asservissement basé sur un
potentiomètre rotatif qui sert de capteur de rotation.
C'est un
ensemble mécanique et électronique comprenant :
· Un moteur à courant continu de petite taille
;
· Un réducteur en sortie de ce moteur diminuant la
vitesse maisaugmentant le couple.
· Un potentiomètre (faisant fonction de diviseur
résistif) quigénère une tension variable, proportionnelle
à l'angle de l'axede sortie ;
· Un dispositif électronique d'asservissement ;
· Un axe dépassant hors du boîtier avec
différents bras ou roues de fixation.

Figure 4.2-3
servomoteur[9]
Ils sont faciles à utiliser car ils ne
nécessitent qu'une source de tension continue et une sortie PWM du
microcontrôleur.
Les servomoteurs sont commandés par
l'intermédiaire d'un câble électrique à 3
fils qui
permettent d'alimenter le moteur et de lui transmettre des
ordres de positions sous forme d'unsignal codé en largeur d'impulsion
plus communément appelés PWM.
Comme le montre la figure 4.2-3, un servomoteur se pilote par
l'intermédiaire d'un câble à 3 fils. Ce câble permet
à la fois del'alimenter et de lui transmettre des consignes de position
par le fil de signal :
· Le noir ou marron : La masse
· Le rouge : La tension d'alimentation continue (+)
· Le jaune, orange ou blanc : Le signal de commande
PWM
5.2.3. Capteur de flamme
Le capteur de flamme KY-026 est un capteur qui permet de
mesurer des longueurs d'onde sur une plage comprise entre 760 nm et 1100 nm. Ce
capteur réagira donc en présence d'une flamme.

Figure 4.2-4 Capteur de flamme
KY-026[10]
La sortie varie en présence d'une flamme (la photodiode
est sensible au spectre lumineux généré par une
flamme). Il a deux sorties :
· Sortie numérique (DO): un
signal est émis si une flamme détectée.
· Sortie analogique (AO): mesure
directe du capteur. Signaux de tension de sortie sur la résistance
thermique en tempsréel.
LED1: indique que le capteur est
alimenté en tension.
LED2: indique qu'une flamme est
détectée.
a. Caractéristiques du capteur
· Catégorie : module de détection
· Extrêmement sensible aux longueurs d'ondes entre
760-1100nm
· Plage d'angle de détection: environ 60
degrés
· Seuil de détection de flamme modifiable par un
potentiomètre
· Tension d'alimentation:DC 3.3 à 5.5 V.
b. Fonctionnement du capteur
Ce module est composé de trois
éléments fonctionnels. Le capteur situé à
l'avant du module effectue la mesure, le signal analogique est ensuite
envoyé sur l'amplificateur. Celui-ci amplifie le signal en fonction du
gain déterminé par le potentiomètre et envoie le signal
à la sortie analogique du module.
Il convient de noter que le signal est inversé: plus la
valeur mesurée par le capteur est haute, plus la tension de sortie est
faible.
La troisième partie est composée d'un
comparateur qui commute la sortie numérique et la diode lorsque le
signal tombe en dessous d'une certaine valeur. La sensibilité peut
être ajustée au moyen du potentiomètre comme décrit
ci-dessous:

Figure 4.2-5
potentiomètre pour ajuster la sensibilité du capteur.
Ce type de capteur ne délivre pas des valeurs absolues
(par exemple, la température mesurée avec précision en
° C), mais des valeurs relatives. On définit une valeur limite par
rapport à une valeur normale donnée et le module émet un
signal si cette limite est dépassée.
c. Brochage

Figure 4.2-6 branchement sur le
breadboard
· Signale numérique = [Pin X]
· +V = [Pin 5V]
· GND = [Pin GND]
· Signal analogique = [Pin A0]
5.2.4. Capteur d'humidité et température
DHT11
Afin de garder de la fraîcheur au sein de l'habitat, on
a intégré dans notre système domotique
unsous-système d'acquisition de température et d'humidité
avec le capteur DHT11.
Cette température acquise va être
renvoyée vers l'utilisateur sur l'application SmartPhone ouson
ordinateur d'une manière automatique.
Ce capteur possède 3 broches espacées de 2,45mm
ce quipermet de le brancher facilement sur une breadboard.

Figure 4.2-7 capteur de
température et humidité DHT11
a. Caractéristiques
· Alimentation en courant continu comprise entre 3.3V et
5V.
· Nombre de broches: 3 ou 4
· Période de collecte du signal : 2s
· Mesure de la température de 0 à
50°C.
· Mesure du taux d'humidité de 20 à 96%
RH.
· Consommation : Comprise entre 0.5 mA et 2.5 mA
· Dimension (Longueur, largeur, Hauteur): 15.5mm, 12mm,
5.5mm.
· Précision pour la mesure de température:
#177; 2° C
· Précision pour le taux d'humidité: #177;
5% RH
· Sensibilité pour la température :
#177; 1% RH
· Sensibilité pour l'humidité :
1° C
b. Brochage du capteur
Les capteurs DHT11 communiquent avec le microcontrôleur
via une unique broche d'E/S, dont on verra ensemble le principe de
fonctionnement dans le point suivant.
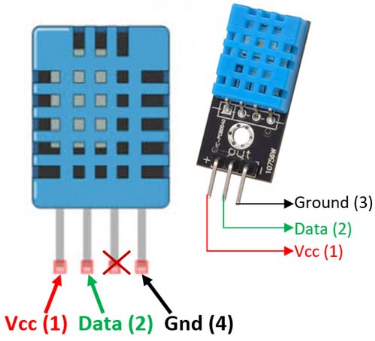
Figure 4.2-8 brochage des pins
du capteur sur Arduino [11]
Le brochage du capteur est le suivant :
· La broche n°1 est la broche d'alimentation (5
volts ou 3.3 volts).
· La broche n°2 est la broche de communication.
· La broche n°3 n'est pas utilisée et ne doit
pas être câblée.
· La broche n°4 est la masse du capteur (GND).
c. Principe de fonctionnement du capteur
Le capteur DHT11 a la particularité de communiquer avec
le microcontrôleur via une unique broche d'E/S. Bien que cela soit
marqué "One Wire" un peu partout sur
le document
constructeur du capteur, il ne s'agit pas d'un véritable bus de
communication
1-Wire. Il s'agit simplement
d'un protocole de communication propriétaire, utilisant un seul fil et
nécessitant des timings très précis.
La communication avec un capteur DHT11 se fait en 3
étapes :
· Tout d'abord, le microcontrôleur maître (la
carte Arduino dans notre cas) réveille le capteur en plaçant la
ligne de données à LOW pendant au moins 18ms. Durant ce laps de
temps, le capteur va se réveiller et préparer une mesure de
température et d'humidité. Une fois le temps
écoulé, le maître va libérer la ligne de
données et passer en écoute.
· Une fois la ligne de données
libérée, le capteur répond au maître (pour montrer
qu'il est bien réveillé) en maintenant la ligne de données
à LOW pendant 80us puis à HIGH pendant 80us.
· Le capteur va ensuite transmettre une série de
40 bits (5 octets). Les deux premiers octets contiennent la mesure de
l'humidité. Les deux octets suivants contiennent la mesure de la
température et le cinquième octet contient une somme de
contrôle qui permet de vérifier que les données lues sont
correctes.
5.2.5. Ecran LCD
Les afficheurs LCD alphanumériques présentent
une solution facile d'emploi et bon marché de dotervotre projet d'une
interface indépendante de votre PC. Vu de l'extérieur, les
écrans LCD alphanumériques sont essentiellement
caractérisés par leur taille.

Figure 4.2-9 afficheur LCD
16x2
a. Le connecteur de l'afficheur LCD
Cet écran possède un connecteur 16 broches.
Ceconnecteur véhicule plusieurs signaux dont une partie forme un bus de
communication parallèle 4 ou8 bits selon la configuration choisie ainsi
que les signaux permettant de contrôler la communicationentre l'Arduino
et l'écran.
La figure 4.2-11 ci-dessous donne la nomenclature des broches
de ce connecteur :

Figure 4.2-10 Connecteur de
l'afficheur LCD
Ces broches ont le rôle suivant :
Tableau 4 Nomenclature du
connecteur de l'afficheur LCD
|
Numéro de la broche
|
Désignation
|
Description
|
|
1
|
GND
|
Masse 0V
|
|
2
|
VCC
|
Alimentation +5V
|
|
3
|
VO
|
Tension de réglage du contraste
|
|
4
|
RS
|
Sélection du registre de données ou commande
|
|
5
|
RW
|
Lecture ou écriture
|
|
6
|
E
|
Activation pour un transfert (Enable)
|
|
7
|
D0
|
Bit 0 de la donnée/commande
|
|
8
|
D1
|
Bit 1 de la donnée/commande
|
|
9
|
D2
|
Bit 2 de la donnée/commande
|
|
10
|
D3
|
Bit 3 de la donnée/commande
|
|
11
|
D4
|
Bit 4 de la donnée/commande
|
|
12
|
D5
|
Bit 5 de la donnée/commande
|
|
13
|
D6
|
Bit 6 de la donnée/commande
|
|
14
|
D7
|
Bit 7 de la donnée/commande
|
|
15
|
A
|
Anode (+) du rétro-éclairage
|
|
16
|
K
|
Cathode (-) du rétro-éclairage
|
5.2.6. Buzzer
Un buzzer ou un bipeur est un
élément électromécanique ou
piézoélectrique qui produit un
son
caractéristique quand on lui applique une
tension :
le
bip. Certains
nécessitent une tension continue, d'autres nécessitent une
tension alternative.

Figure 4.2-11 buzzer
5.2.7. Clavier matriciel 4*4
Afin d'assurer l'accès sécurisé à
l`habitat, on a pensé à introduire dans notre système de
commande, unsous-système permettant à l'utilisateur
d'accéder chez lui tout en introduisant un code
sécurisé.Pour cela on a besoin d'un clavier matriciel pour entrer
le mot de passe d'ouverture de la porte.
a. Principe du clavier matriciel
Un clavier matriciel (dans notre cas 16 touches) dispose
uniquement de 8 broches pour la gestion deses touches. L'organisation est de 4
colonnes et 4 lignes.

Figure 4.2-12 clavier matriciel
et son schéma de principe
b. Bronchement avec Arduino Uno
Pour le bronchement du clavier matriciel avec la carte Arduino
Uno, on a choisi les broches numériques de (D2 à D9) avec (D2
à D5 vers les colonnes et de D6 à D9 vers les lignes) :

Figure 4.2-13 connexion du
clavier sur arduinoUno
5.2.8. LEDs
Nous avons utilisé les LEDs entant que lampes.Une
diode électroluminescente (DEL, en
anglais : Light-Emitting Diode LED), est un composant
optoélectronique émettant de la lumière lorsqu'il est
parcouru par un courant électrique dans le sens direct. Une LED est donc
une diode qui émet de la lumière. Comme toute diode elle comporte
une anode (borne +) qui est la patte la plus longue et une cathode (borne -)
qui est la patte la plus courte. Il en existe de plusieurs types de
couleur: rouge, jaune, orange, banche, bleu, verte, ...

Figure 4.2-14 types de
led
Pour qu'une LED s'allume il faut obligatoirement relier sa
patte négative à la borne négative de l'alimentation et sa
patte positive à la borne positive de l'alimentation. Si la LED est
branchée à l'envers elle ne s'allumera pas (le courant ne la
traversera pas).
De plus elle ne doit pas être traversée par un
courant trop fort, c'est pour cela qu'il est indispensable de brancher une
résistance en série avec la LED. On notera qu'une
résistance n'a pas de sens de branchement.
5.2.9. Point d'accès
Pour se connecter au réseau local du
système domotique via le module Ethernet Shield HunRun, on a besoin
d'une passerelle pour que l'utilisateur puisse accéderà
l'application de commande.

Figure 4.2-15 point
d'accès TP-Link.
Caractéristiques
· Borne d'accès sans fil
· Débit de transfert de données :300
Mb/s
· Bande de fréquence :2.4 GHz
· Normes de conformité: IEEE 802.11b, IEEE 802.11g,
IEEE 802.11n
· Nombre d'antennes : 2.
5.3. Réalisation du système de commande et
contrôle d'une maison intelligente
La première étape consiste à créer
une maison. Lamaquette a une échelle de 1/20 et est constituée
d'un salon, de deux chambres, d'une cuisine, d'une salle de bains, et d'un
corridor.

Figure 4.3-1 phase de la
réalisation de la maquette

Figure 4.3-2 Résultat
final de la maquette
Cette maquette, permet de présenter certaines
fonctionnalités de la domotique à travers deux
Capteurs
(Humidité et Température, et de Flamme.) se trouvant
respectivement au salon et dans la cuisine et un Servomoteur et autres
périphériques. Ces scénarios seront automatisés via
la carte « Arduino Uno »exécutant des programmes
informatiques.
A part les capteurs, les actionneurs et composants
cités ci-haut, voici la liste des logiciels, outils et langages que nous
avons utilisés pour la réalisation de ce projet:
· Arduino IDE ;
· Notepad ++ ;
· Xamp ;
· Photoshop ;
· Paint ;
· Langage Arduino,
· PHP : langage spécialement conçu
pour le développementd'application web qui peut être facilement
intégré au HTML.
· SQL : SQL est un langage informatique normalisé
qui sert àeffectuer des opérations sur des bases de
données.
· HTML (HyperText markup language) : il ne s'agit pas
d'un langage de programmation
mais plutôt d'un langage de description
et de structuration de page.
· CSS (Cascading Style Sheets) : C'est un langage qui
permet de gérer la présentation (miseen forme de nos pages). Il
permet de préciser les caractéristiques visuelles d'une page
oud'un élément : les polices de caractères et leur taille,
les bordures, les couleurs...etc.
· JQuery : JQuery est une bibliothèque JavaScript
libre d'usage. Elle intègre de nombreusesfonctionnalités, parmi
elles on peut citer :
§ Accéder aux éléments d'un
document,
§ Altérer le contenu d'un document,
§ Répondre aux actions de l'utilisateur,
§ Animer les modifications d'un document,
§ Écrire plusieurs instructions sur une seule
ligne grâce au chainage.
5.4. Algorithme de commande et contrôle
Sachant qu'un algorithme est la description précise, sous
forme de concepts simples, de la manière dont on peut résoudre un
problème. Voici les organigrammes décrivant le déroulement
de notre travail en mode automatique ainsi qu'en mode manuel.
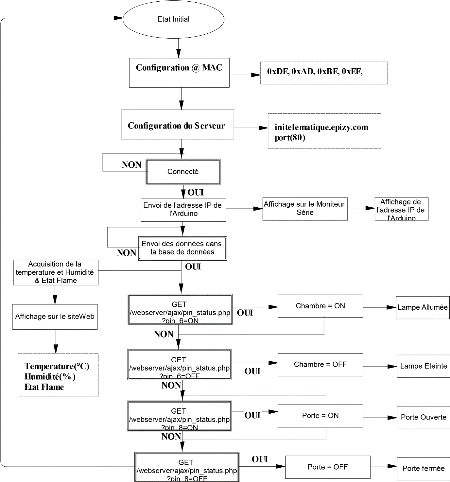
Figure 4.4-1 Organigramme pour le
fonctionnement automatique de l'application.
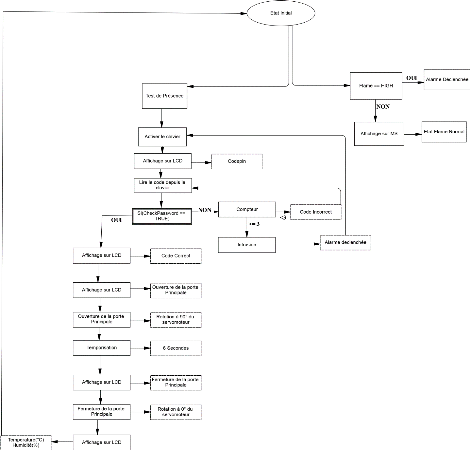
Figure 4.4-2 Organigramme
décrivant le fonctionnement manuel du projet.
5.4.1. Fonction d'ouverture de la porte
Le confort est placé au premier plan ; pour cela,
pour éviter les actes répétitifs et pour une
bonne
sécurité de la maison, la porte doit s'ouvrir seulement si le mot
de passe entré sur le clavier est valide. Dans le cas contraire, nous
avons laissé la possibilité de taper un bon mot de passe trois
fois de suite et l'alarme se déclenche une fois que le mot de passe est
incorrect trois tentatives de suite.

Figure 4.4-3 page de l'ouverture
de la porte
Egalement la commande à distance de l'ouverture et la
fermeture de la porte principale de la maison est gérée par
l'application web.
5.4.2. Fonction d'éclairage
La fonction d'éclairage est assurée via
l'application web qui va être commandée à travers le
moduleEthernet branché sur la carte Arduino Uno et lié au point
d'accès qui va créer un réseau local entre le PCou
SmartPhone et les LEDs considérés comme lampes de
l'éclairage.

Figure 4.4-4 page pour
l'éclairage dans la maison
5.4.3. Fonction d'affichage de la température
et humidité
La fonction de l'acquisition de la température et de
l'humidité est réalisée via le capteur DHT11 par la suite
lesvaleurs acquises seront affichées sur l'écran LCD et sur
l'application web.
 
Figure 4.4-3 pages pour l'affichage de le
température et humidité dans la maison
5.4.4. Fonction de contrôle d'incendie
La sécurité est devenue un élément
primordial dans le choix d'une maison. Et l'une des plus
grande crainte
d'accident reste l'incendie.Ainsi nous avons associé différents
composants afin d'utiliser un détecteur de flamme dans la cuisine pour
une bonne sécurité. Lorsque la flamme est détectée,
le système déclenche une alarme à l'aide d'un Buzzer.

Figure 4.4-5 page pour le
contrôle de l'incendie
Conclusion
La réalisation des maisons intelligentes a
été au coeur de plusieurs projets de recherche lors de
cesdernières années. D'énormes progrès ont
été accomplis grâce aux avancées en intelligence
artificielle,à la miniaturisation de dispositifs électroniques
pour la domotique et au développement des réseauxde
communication. Malgré tout, il reste encore plusieurs défis
à surmonter pour rendre possiblel'implémentation des maisons
intelligentes en situation réelle.
Dans notre projet, nous avons
essayé de mettre en oeuvre une centrale embarquée qui
répond à des fonctionsprincipales de la domotique à savoir
la gestion d'éclairage, l'accès sécurisé à
l'habitat, le contrôle de la température et l'humidité de
l'habitat dont le but de contrôlerla ventilation et le chauffage
grâce à une application web.
CONCLUSION GENERALE
En guise de conclusion, nous estimons avoir atteint notre but
qui est bel et bien la conception et la réalisation d'une maison
intelligente commandée à distance par un smartphone ou un PC.
C'est ainsi que la première partie introduit le sujet
de notre travail. Dans le premier chapitre nous avons fait une
présentation générale de systèmes
embarqués.
Dans le second chapitre de notre travail nous avons
présenté la partie matérielle et logicielle de l'Arduino.
Le troisième quant à lui présente les
généralités sur la domotique.
Et enfin dans le dernier chapitre nous avons
réalisé la maison intelligenteen énumérant les
outils et composants électroniques que nous avons utilisé pour la
réalisation de cette dite maison et en fin en développant une
application web pour la commande et la surveillance à distance de la
maison.
Dans le cadre du thèmede la domotique, nous avons
effectivement fabriqué une maquette d'une maison dite «
intelligente » capable :
Ø De gérer l'accès à la porte
principale de la maison ;
Ø De gérer l'éclairage des
chambres ;
Ø De prévenir avec une alarme en cas d'incendie
ou d'intrusion ;
Ø Aussi de surveiller l'état de la
température et l'humidité.
Cependant, les fonctionnalités ne serestreignent pas
à celles-ci et d'autres peuvent être ajoutées grâce
à un système decentralisation. Pour ces raisons, nous avons
créé un Web Server en utilisant un module Ethernet qui permet de
créer unréseau local entre les différents organes du
système de contrôle tout en se connectant via un point
d'accèssur l'application web de commande.
Ayant constaté le succès dans notre travail,
nous nous réjouissons du résultat trouvé avec l'objectif
que nous nous étions fixé au début de notre travail.
En effet, les notions apprises en classe ont été
une base solide parce que c'est dans ces dernièresque nous avons
puisées pour concevoir notre application. L'accomplissement de ce
mémoire nous a donc été utile dans la mesure où
nous avons pu confronter nos connaissances théoriques avec la
pratiquetout en acquérissant de meilleures connaissances des
applications dela domotique, ce qui pourrait nous être fortement utile
dansnotre future vie professionnelle.
Le seul point « négatif », serait
sûrement le manque de rencontre physique avec des professionnels
travaillant dans ladomotique pour recueillir des informations techniques et des
explicationsnécessaires à la compréhension du principe de
fonctionnement de certaines technologies. Cependant rien ne nous empêche
decontinuer sur cette voie de notre propre côté.
Pour ce qui
est des perspectives de continuation plusieurs voies peuvent être
envisagées. À titreindicatif, nous conseillons d'examiner et de
développer les points suivants :
ü Développer une application Android au lieu de
celle réalisée dans ce projet de telle façon
àenrichir le système de contrôle avec d'autres fonctions
domotiques.
ü Piloter la domotique à partir des données
reçues d'un réseau domotique et d'un système
d'analyse
sonore ayant la capacité de reconnaître les ordres vocaux. Les
actions exécutées parle contrôleur se produisent en
réponse aux commandes vocales prononcées par l'habitant oude
manière proactive pour assurer sa sécurité et son
confort.
ü Dans le cas de la reconnaissance de la situation de
l'habitant, connaître la position de lapersonne et sa localisation
précise dans une pièce.
ü Réaliser le contrôle domotique en
utilisant un module GSM qui permet d'augmenter la
possibilité de
surveiller l'habitat tout en communiquant via des commandes envoyés par
SMS, soit envoyer un message SOS au pompier en cas d'incendie, soit à la
police en cas d'intrusion suspecte, etc.
ü Ajouter une fonction de détection d'intrusion
tout en utilisant une caméra de surveillance etavec un traitement
d'images pour la reconnaissance faciale des personnes.
BIBLIOGRAPHIE
1. OUVRAGES
[1] Ovide DECROLY, The
political in society, Paris, 1907.
[2] GRAWITZ M., Méthode des
sciences sociales, Dalloz, Paris, 1992, p. 24.
[3]Simon Landrault Eskimon et Hippolyte
Weisslinger Olyte, Arduino : Premiers pas en informatique
embarquée, juin 2014.
[5] Marc-Olivier SCHWARTZ, Arduino pour
la domotique, Juillet 2015.
[10]Fréderic Genevy et Jean-Pierre
Dulex, Arduino à l'école, septembre 2018.
[11] Erik BARTMANN, Le grand livre
d'Arduino, Janvier 2014.
2. SITES INTERNET
[3]
https://www.memoireonline.com/05/12/5830/Les-systemes-embarques.html.
Visité le 26/03/2019
[4] Arduino Uno,
http://www.arduino.cc
Consulté le 22/02/219
[5]
http://maisoncommunicante.free.fr/
visité le 17/03/2019
[6]
https://www.groupe-scala.com/wifi-bluetooth-zigbee-z-wave-quel-reseau-choisir-pour-ses-objets-connectes/visité
le 17/03/2019
[7]
https://www.maison-et-domotique.com/
visité le 17/03/2019
[8]
https://www.aranacorp.com/fr/pilotez-un-servo-avec-arduino/
consulté le 03/03/2019
[9]
http://www.hack4.info/index.php?static1/cartes
visité le 21/03/2019
[10]
http://sensorkit.fr.joy-it.net/index.php?title=KY-026_D%C3%A9tecteur_de_flamme
consulté le 24/02/2019
[11]
https://jingweizhu.weebly.com/blog/category/arduino
consulté le 24/2/2019
| 

