|
Mémoire professionnel Master 2
Ergonomie

UNIVERSITE DE CAEN NORMANDIE
UFR Sciences et Techniques des Activités Physiques et
Sportives
Polieco France
MEMOIRE PROFESSIONNEL
Pour l'obtention du Master ERGONOMIE
IMPORTANCE DU ROLE DE L'ERGONOME SUR
L'INTEGRATION D'UN
DISPOSITIF D'ASSISTANCE
PHYSIQUE EN ENTREPRISE
Présenté par DUCOULOMBIER Florian
Sous la direction de FEZZOLI Amélie - Responsable
QHSE
2020-2021
et BOCCA Marie-Laure - Enseignant-Chercheur
Mémoire professionnel Master 2
Ergonomie
Mémoire professionnel Master 2
Ergonomie
Remerciements
Je tiens à remercier toutes les personnes qui ont
contribué au succès de mon stage et qui m'ont aidé lors de
la rédaction de ce mémoire.
Je tiens à remercier vivement mon maitre de stage, Mme
Amélie FEZZOLI, responsable du service QHSE, pour son accueil, le temps
passé ensemble et le partage de son expertise. Grâce aussi
à sa confiance j'ai pu m'accomplir totalement dans mes missions et
acquérir une vraie expérience professionnelle.
Plus globalement, je remercie l'ensemble du personnel de
Polieco France qui s'est montré disponible et à l'écoute
de mes questionnements ainsi que de leur reconnaissance et de leur attention au
domaine de l'ergonomie.
J'adresse également ma reconnaissance à Mme
Bocca, ma tutrice universitaire pour le suivi de mon questionnement et les
retours sur cet écrit.
Je remercie l'équipe pédagogique de la
filière Ergonomie de l'UFR STAPS de Caen et spécialement Mme
Faugloire et Mme Lejeune pour leur implication dans notre formation scolaire et
professionnelle.
Enfin, je tiens à remercier toutes les personnes qui
m'ont conseillé et relu lors de la rédaction de ce rapport de
stage : ma famille, mes amis et camarades de promotion.
Mémoire professionnel Master 2
Ergonomie
SOMMAIRE
Liste des abréviations
Introduction 1
1. L'entreprise 2
1.1. Présentation de l'entreprise 2
1.2. Présentation du service 4
1.3. Présentation de la chaudronnerie
4
2. Exosquelettes 6
2.1. Rôle de l'exosquelette 6
2.2. Différents types 7
2.2.1. Actif 8
2.2.2. Passif 13
2.3. Comment l'intégrer 17
2.3.1. Phase 1 17
2.3.2. Phase 2 21
2.3.3. Phase 3 25
2.3.4. Conclusion de l'intégration 26
3. Cas Pratique 27
3.1. Intégration en entreprise 27
3.2. Intérêts et limites 27
3.3. Suite du projet 30
4. Discussion 31
Conclusion 32
Bibliographie 33
Annexes 36
Mémoire professionnel Master 2
Ergonomie
Liste des abréviations
AT : Accident du Travail CdC : Cahier des Charges
CEA-LIST : Commissariat à l'Energie Atomique - Laboratoire
d'Intégration des Système et des Technologies
DAP : Dispositif d'assistance Physique
DUERP : Document Unique d'Évaluation des Risques
Professionnels
EMG : Électromyogramme
EPI : Équipement de Protection Individuelle
HAL : Hybrid Assistive Limb
MP : Maladie Professionnelle
PE : Polyéthylène
PEHD : Polyéthylène Haute Densité
PME : Petite et Moyenne Entreprise
PP : Polypropylène
QHSE : Qualité Hygiène Sécurité et
Environnement
QHSE/EC : Qualité Hygiène Sécurité et
Environnement / Économie Circulaire
TMS : Trouble musculosqueletique
TPE : Très Petite Entreprise
1
Mémoire professionnel Master 2
Ergonomie
Introduction
Les nouvelles lois sur l'âge légal de
départ en retraite, le vieillissement grandissant des populations
actives, les exigences des entreprises en constante augmentation font
apparaître, pour l'homme, des besoins d'assistance physique de plus en
plus grande. Les technologies d'aide et d'assistance, issues il y a quelques
années du monde médical et militaire sont en plein essor et se
répandent dans de nombreux domaines comme l'industrie, le BTP, la
maintenance, logistique, transport, aide à la personne, et d'autre
encore. On parle notamment ici de Robots, de Cobots (Robots Collaboratifs),
d'exosquelette qui dans l'esprit de beaucoup de monde pourrait désormais
correspondre à ces besoins d'assistance physique en garantissant une
meilleure production ainsi qu'une meilleure sécurité des
opérateurs. Malgré cela, ce sont tout de même des
technologies issues du monde militaire et la question que l'on pourrait se
poser est la suivante : ces dispositifs d'assistance physique sont-ils
adaptés et adaptables à tout point de vue au monde industriel
d'aujourd'hui mais aussi s'ils sont correctement intégrés sur les
postes.
Polieco France a toujours été investi en termes
de sécurité et de santé des opérateurs sur tous les
secteurs de l'entreprise avec le Comité Social et Économique
(CSE) qui se réunit régulièrement afin d'observer les
dernières modifications de postes, de mettre à jour le Document
Unique et faire remonter les risques et les améliorations envisageables
à la direction. Leur volonté de maintenir la
sécurité en entreprise m'a donc permis, comme on va le voir dans
cet écrit, de mettre en place la démarche d'intégration
d'un dispositif d'assistance physique.
L'objet de ce mémoire est donc en premier lieu de
présenter l'entreprise POLIECO France et leur production en quelque
chiffre. Dans un second temps il s'agira de présenter les
différents dispositifs d'assistances physiques existant, ainsi que leurs
intérêts et leurs limites mais également comment les
intégrer. Dans un troisième temps nous verrons le cas pratique
d'intégration du dispositif d'assistance et nous finirons par une
discussion de cette intégration. De ce fait nous pourrons observer le
rôle déterminant de l'ergonome sur l'intégration d'un
dispositif d'assistance physique en entreprise.
2
Mémoire professionnel Master 2
Ergonomie
1. L'entreprise
1.1.Présentation de l'entreprise
La société SA POLIECO France a été
fondée en 1999 par le groupe italien POLIECO. Les deux sites de
production dans le département de l'Ain ont permis au groupe de devenir
rapidement l'un des leaders du marché français du tube
annelé à double paroi (figure 1) pour assainissement
gravitaire et pour applications réseau sec. Les deux sites de production
de Polieco France transforment ensemble 14 000 tonnes de
polyéthylène (PE) et de polypropylène (PP). Depuis
près de 20 ans, Polieco France fabrique et commercialise des tubes
annelés réalisés en 100% polyéthylène
recyclé et 100% recyclable, issus du tri sélectif des
Français, bouteille de lait, bouteille de shampoing et bidon de
lessive.

Figure 1 : Tube annelé à double paroi
(Crédit Polieco)
Les tubes annelés sont fabriqués par un
procédé de coextrusion. Ils présentent une surface
extérieure annelée et une surface intérieure lisse. Les
tubes s'assemblent facilement grâce a des manchons et à des
joints. Les tubes sont disponibles la plupart du temps en longueur utile de 6
mètres, néanmoins certain produit se vendent en longueur d'1m.
Le site de Feillens est spécialisé dans la
fabrication de tubes et de drains (rainure dans le tube présenté
en figure 2) annelés double paroi en Polyéthylène Haute
Densité (PEHD), du diamètre 215mm au 1200mm intérieur,
ainsi que dans la réalisation de pièces spéciale en
chaudronnerie plastique (Coude, Tés, Culottes (Y), etc.)
3
Mémoire professionnel Master 2
Ergonomie

Figure 2 : Tube annelé drainé à double
paroi (Crédit Polieco)
L'usine principale de Feillens présente trois lignes de
production qui tourne en 3/8 tout au long de l'année. La ligne n°1
est capable de faire du diamètre 215mm au 500mm mais au vu de la demande
elle reste 99% du temps en diamètre 300. La ligne n°2 peux faire
jusqu'au diamètre 1030 mais réalise principalement du 400, 500,
600mm. La dernière ligne réalise du 800, 1030 et 1200mm. Les
changements de diamètre se font généralement le lundi
matin avant de mettre les extrudeuses en chauffent. Tous ces diamètres
sont réalisés en longueur utile de 6m avec manchonnage en sortie
de ligne, cependant en fonction de la demande, la ligne n°3 peut
réaliser des ANO'PE, ce sont des tubes drainés en longueur
d'1m.
Chaque ligne est gérée par 1 opérateur en
fin de ligne pour la palettisation principalement, 1 chef d'équipe
supervisant les 3 opérateurs, et cela, à chaque cycle de 8h. De
plus est présent un laborantin en horaire classique travaillant pour le
service qualité.
Le site de Bellegarde/Valserhône est
spécialisé dans la production de gaines et fourreaux, du
diamètre 25mm à 200mm intérieurs, pour le passage et la
protection des câbles électriques et des tubes eau et gaz. Sur le
même principe que le site de Feillens, cette usine tourne grâce
à 7 lignes de production, avec des diamètres qui peuvent varier
en fonction des lignes.
4
Mémoire professionnel Master 2
Ergonomie
1.2.Présentation du service
Le service dans lequel j'ai pu effectuer mon stage est le
service Qualité Hygiène Sécurité et Environnement
(QHSE), suivi par Amélie FEZZOLI, responsable Qualité
Hygiène Sécurité et Environnement / Économie
Circulaire (QHSE/EC).
Grace à mon appartenance au service QHSE, j'ai pu
réaliser des missions au sein des services de production, de logistique,
de maintenance mais également de l'administratif.
1.3.Présentation de la chaudronnerie
La chaudronnerie plastique est un secteur accolé
à l'usine de Feillens, d'où provient leur matière
première. Leur production est accès sur la fabrication de
pièces spéciales en fonction des commandes des clients.
L'activité se base sur des tubes de 800 mm, 1030 mm et
1200 mm avec lesquels les quatre chaudronniers réalisent principalement
des coudes (L), des tés (T) et des culottes (Y) ainsi que des cuves et
bassins de rétention ou d'infiltration sur mesure.
C'est une activité peu normée en termes de
gestuelle et de positionnement du corps et des membres pour réaliser ces
pièces. Les chaudronniers possèdent des plans de ces
dernières et grâce à un panel d'outils (ponceuse, scie
sabre, souffleuse, extrudeuse portable, etc.) et de machines (découpeuse
à commande numérique, plieuse, soudeuse à bout, scie
à ruban, perceuse à colonne, etc.) à leur disposition, ils
réalisent leurs pièces de A à Z.
Dû à l'absence de normalisation de la gestuelle
ainsi que les grandes proportions des pièces, les chaudronniers optent
parfois pour des positions de corps extrêmes. Des positions,
principalement penchées en avant, avec port de charge ou non, qui
mettent le dos, et principalement la zone lombaire, à rude
épreuve, comme on peut le voir sur les photos suivantes (Figure 3
à 6).
Mémoire professionnel Master 2
Ergonomie

Figure 3 Figure 4

5
Figure 5 Figure 6
6
Mémoire professionnel Master 2
Ergonomie
Au vu de la situation que j'ai pu observer, je me suis
demandé quel était la meilleure solution pour aider les
chaudronniers dans leur problématique posturale sans pour autant
modifier intégralement leur espace de travail ou leur répertoire
gestuel, qui, de toute manière, ne peut pas être modifié.
Après réflexion et discutions avec les chaudronniers et les
différents responsables, la solution d'un Dispositif d'Assistance
Physique était envisageable. Nous allons donc voir par la suite les
dispositifs présent sur le marché, comment les intégrer
pour finir par le cas pratique dans lequel nous l'intégrons
2. Exosquelettes
Avant toute présentation des exosquelettes ainsi que
leur intégration il est à notifier que les exosquelettes sont
considérés comme un Équipement de Protection Individuelle
(EPI) et donc à adapter en dernier recours, car on rappelle qu'il est
préférable de privilégier les équipements de
protection collective avant d'envisager l'utilisation d'un EPI.
2.1.Rôle de l'exosquelette
Avec les exigences du travail qui ne cesse d'augmenter au fil
des années, de nombreuses entreprises sont tentées par
l'utilisation d'un exosquelette pour leurs opérateurs. Dans le but
d'augmenter l'opérateur pour qu'il soit plus performant, tout en
améliorant ses conditions de travail, grâce à la
réduction des contraintes physiques et par conséquent des risques
de troubles musculo-squelettiques (TMS).
Malheureusement, beaucoup d'entreprises intègrent des
exosquelettes sans forcément faire toutes les analyses préalables
et utiles afin de trouver la solution la plus adaptée à la
situation. De plus, sachant que les exosquelettes font partie d'un ensemble de
nouvelles technologies d'assistance physique, cela pose des questions relatives
à la sécurité et à la santé des
opérateurs. D'un point de vue mécanique, électrique,
vibratoire etc. mais également d'un point de vue organisationnel, il
faut pouvoir trouver l'exosquelette adapté afin de ne pas modifier, ou
le moins possible, l'organisation de travail de l'opérateur, ses
sensations proprioceptives, ou sa charge cognitive.
7
Mémoire professionnel Master 2
Ergonomie
Dans cette partie nous allons uniquement aborder le sujet des
dispositifs d'assistance physique (DAP) et des Robot d'Assistance Physique avec
contention (RAPac) en excluant celui des Robot d'Assistance Physique sans
contention (RAPsc) aussi dénommé Cobot (roBOT COllaboratif) qui
sont trop éloignée sur le plan technique et physique du besoin
d'assistance que l'on souhaite étudier dans ce mémoire. Un
schéma récapitulatif des nouvelles technologies d'assistance
physique est présenté ci-dessous.

Figure n° 7 : Les exosquelettes au sein des
nouvelles
technologies d'assistance physique (INRS)
2.2.Différents types
Comme nous pouvons le voir sur le schéma n°7, il
existe deux grands types d'exosquelettes. Les Dispositifs d'Assistance Physique
avec contention sont non énergisés et se basent uniquement sur de
la restitution d'énergie grâce à des ressorts,
élastiques ou amortisseurs pneumatiques, on les appellera passif. Les
Robot d'Assistance Physique avec contention sont quant à eux fournis de
batteries et de moteurs pour supporter au maximum la charge physique de
travail, on les appellera actifs.
En plus de cela chaque exosquelette est différentiable
par la partie du corps qu'il assiste. On peut ainsi constater des exosquelettes
pour soulager le dos, les membres inférieurs, les membres
supérieurs ou le corps entier (DE LOOZE et al. 2016).
8
Mémoire professionnel Master 2
Ergonomie
2.2.1. Actif
Les exosquelettes actifs sont des équipements pourvus
de moteurs et de batteries permettant une aide mono ou poly-articulaires.
Les gros points fort des exosquelettes actifs ce sont leur
capacité à "augmenter» la force ou encore l'endurance de
l'opérateur. Cela permet avant tout un port de charge plus important,
pour les exosquelettes corps entier ou bas du corps, grâce à un
effort transmis directement au sol. Les premières créations
étaient, initialement, pour un objectif militaire et aidaient les
soldats à porter leurs sacs. Malgré cet avantage, il reste un
frein technologique et un gros point faible, qui est l'autonomie des batteries
ainsi que la dimension globale de l'exosquelette mis en cause par les moteurs
et ces batteries.
Les mouvements de l'exosquelette sont induits par la
volonté de mouvement de l'opérateur, cette intention est
captée, soit par une mesure de la force soit par un
Électromyogramme (EMG).
La mesure de la force est implémentée par des
capteurs d'effort, avec un traitement adéquat cela permet à
l'utilisateur d'ordonner les mouvements de l'exosquelette. Son gros point fort
est que cela permet de détecter des efforts de très faible
valeur.
La commande par mesure électromyographique est pour
l'instant uniquement utilisée par l'université de Tsukuba qui a
conçu HAL (Hybrid Assistive Limb) (figure n°8), un
«exosquelette d'amplification» (Kiguchi et al., 2001)
9
Mémoire professionnel Master 2
Ergonomie

Figure n° 8 : HAL (Crédit Cyberdyne)
On retrouve sur le marché d'autres exosquelettes actifs
assistants les différentes zones du corps vu
précédemment.
Hercule
La société RB3D couplée à la
technologie du CEA-LIST (Commissariat à l'Énergie Atomique -
Laboratoire d'Intégration des Système et des Technologies) a
réussi à s'imposer
10
Mémoire professionnel Master 2
Ergonomie
dans le domaine de technologie d'assistance physique en
créant l'exosquelette Hercule (figure n°9), initialement
prévu à des fins militaires.
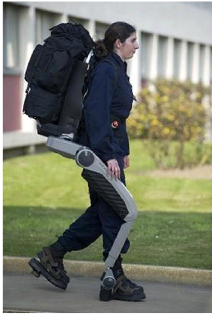
Figure n°9 : Version militaire de l'exosquelette Hercule
(Crédit RB3D)
Le fonctionnement de Hercule est basé sur l'intention de
mouvement obtenu par des capteurs de force vu plus tôt. De plus, une
centrale inertielle permet à l'exosquelette de maintenir
l'équilibre à l'arrêt comme en mouvement.
La version originale de l'exosquelette Hercule dans sa version
militaire permet, d'après RB3D, de se mouvoir à une vitesse de
4km/h durant 20 km. Il pèse 25kg et permet un port de charge allant
jusqu'à 50kg.
Pour la mise en circulation dans le civil, Hercule a
été décliné pour des activités de ratissage
dans le BTP (figure n°10), ainsi que pour le port de charge lorsqu'il est
complété par deux bras robotisés (figure n°11).
11
Mémoire professionnel Master 2
Ergonomie
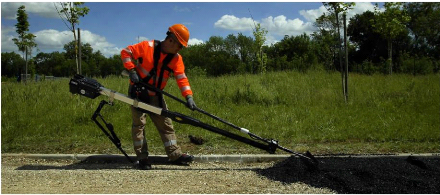
Figure n°10 : Exopush : version civilisée de
Hercule (Crédit
Swissroc)

Figure n° 11 : Exosquelette Hercule dans sa version avec
bras
robotisés (Crédit look at science)
12
Mémoire professionnel Master 2
Ergonomie
Japet.W
L'exosquelette Japet (figure n°12) a été
conçu dans le but de réduire les contraintes lombaires dues aux
manutentions de charge, aux tâches répétitives et aux
postures contraignantes de la colonne. C'est un exosquelette qui s'adapte aux
mouvements de l'opérateur et maintient son dos pour limiter la prise de
posture à risques et préserver la zone lombaire au niveau
musculaire comme articulaire.

Figure n°12 : Exosquelette Japet (Crédit
Japet)
L'exosquelette Japet.W est présenté comme une
ceinture lombaire ouverte permettant le mouvement et la mobilité. Une
mobilité qui est assistée par 4 micromoteurs qui permettent de
diminuer la pression sur la colonne.
Selon le recueil d'étude scientifique
réalisé par Japet, cette technologie certifiée CE
médical et validée par les médecins permet :
- Une diminution de l'impact lombaire
- Un maintien de l'équilibre de la zone lombaire
- Un soulagement des pressions sur le rachis lombaire à
hauteur de 40%
- Une diminution de la pénibilité au travail
- Un soulagement des douleurs lombaires au travail
13
Mémoire professionnel Master 2
Ergonomie
- Un maintien de l'activité musculaire lombaire - Une
prévention des risques de TMS lombaire
Une des contraintes principales de l'exosquelette actif
étant le poids des moteurs et des batteries, il existe actuellement que
très peu de modèle actif soutenant uniquement la partie des
membres supérieurs.
A côté de tous ces exosquelettes actifs se
développent des modèles non énergisés dû
à un coût d'achat abordable même pour une Petite et Moyenne
Entreprise (PME) ou une Très Petite Entreprise (TPE).
2.2.2. Passif
Les exosquelettes passifs se basent sur de la restitution
d'énergie grâce à des ressorts, fait
généralement de fibre de carbone ou de fibre de verre,
d'élastiques, etc. L'assistance qu'ils apportent permet de lutter contre
la gravité et sont créés pour des opérations de
manutention et des ports d'outils. Dans le cas d'exosquelettes passifs on ne
parle pas «d'homme augmenté» mais «d'homme
préservé", cela induit que l'assistance crée une
diminution de l'effort musculaire mais cela n'augmente pas la force disponible
au niveau de la zone sollicitée. Malgré cela il a
été démontré par Axel S Koopman et al. qu'un
exosquelette passif pouvait réduire de 10 à 40% l'effort
musculaire au niveau du dos.
Les gros points forts des DAP sont leurs encombrements, ils
prennent généralement très peu de place et très peu
de volume une fois porté mais également en rangement. Cela est
dû à l'absence de moteur et de batteries qui sont synonymes de
volume pour les Robots d'Assistance Physique. C'est un avantage pour
l'opérateur par rapport au poids et s'il doit porter des outils proches
du corps mais également pour son environnement puisqu'il a moins de
risque de collision et de gêne. L'absence de système
électronique permet également une plus grande facilité
d'utilisation, moins de réglage à faire pré-utilisation et
ainsi une plus rapide mise en place et mise en action.
14
Mémoire professionnel Master 2
Ergonomie
HAPO
Le produit Hapo (figure n°13) créé par
ErgoSanté est appelé harnais de posture car
catégorisé dans les exosquelettes passifs, il permet de diminuer
les efforts lombaires ainsi que préserver les disques
intervertébraux. En fonction des réglages, Hapo crée une
assistance lombaire en position statique debout et en flexion dynamique de la
position main au sol jusqu'au bras en hauteur.

Figure n°13 : Harnais de posture HAPO (crédit
ErgoSanté)
La technologie de l'exosquelette est basée sur de la
restitution d'énergie en redirigeant, en partie, les efforts du haut du
corps vers les jambes grâce à des grandes fibres de verre (en
jaune sur la figure n°14) qui peut être activé ou
désactivé par un simple clic.

Figure n°14 : Harnais de posture HAPO
déverrouillable en 1 clic
(Crédit ErgoSanté)
15
Mémoire professionnel Master 2
Ergonomie
Les plus gros avantages de l'exosquelette HAPO sont qu'il est
léger (moins de 2kg) et très rapide à mettre en place et
à déséquiper, cela permet une plus grande
acceptabilité pour les opérateurs qui en ont besoin. En plus de
cela, c'est un produit qui procure une assistance jusqu'à 14 kg en
posture penchée en avant.
Paexo Shoulder
Paexo Shoulder (figure n°15) est un deuxième
produit phare d'ErgoSanté, il permet un soutien au niveau des
épaules, des trapèzes et des bras lorsque ces derniers sont en
position haute.

Figure n°15 : Exosquelette Paexo Shoulder (Crédit
ErgoSanté)
Étant un exosquelette passif, son grand avantage est
son poids, moins de 2kg, et sa structure peu volumineuse qui permet une
efficacité maximum en gardant un excellent confort. Cela permet
également d'être rapide pour s'équiper et se
déséquiper
Le Paexo Shoulder, de par ses caractéristiques permet
une assistance quasi-systématique lors des postures statiques et mobiles
en fonction de la hauteur de travail. De plus, les réglages de
l'exosquelette permettent de modifier la tension des ressorts afin d'avoir une
assistance optimale plus ou moins haute.
16
Mémoire professionnel Master 2
Ergonomie
Chairless Chair
La Chairless Chair (figure n°16) ou chaise sans chaise en
français, est une invention de la société Noonee
permettant aux utilisateurs de passer de la situation debout, à assise,
à marché.

Figure n°16 : Exosquelette Chairless Chair en position
assise
(Crédit Noonee)
Cette technologie permet, selon le constructeur, une
réduction de poids significative de plus de 25%. Il a depuis longtemps
été démontré que le changement de position durant
le travail était bénéfique (Kermit.G et al). Passer du
travail assis au travail debout durant sa journée ne peut pas être
réalisé par tout le monde à tous les postes. Or,
grâce à ce produit cela peut être une possibilité
sans modification majeure de l'environnement de travail. De plus, les
différents réglages de l'exosquelette le rendent utilisable pour
des personnes allant d'une taille de 1m50 à 2m.
17
Mémoire professionnel Master 2
Ergonomie
Toutes ces technologies malgré leur simplicité
d'utilisation et leur fonctionnement instinctif en fonction des situations,
doivent pouvoir être intégré de la meilleure des
façons possibles en suivant une méthode précise.
2.3. Comment l'intégrer
D'après Jean-Jacques Atain Kouadio et al., la meilleure
méthode d'intégration d'un exosquelette professionnel en
situation de travail comprend trois phases. La première phase est une
aide à la décision sur l'acquisition d'exosquelette, puis vient
une évaluation de l'interaction entre l'homme et l'exosquelette puis en
phase final, c'est un retour d'expérience.
2.3.1. Phase 1
2.3.1.1. Analyse de la charge physique de travail
La première phase est une aide à la
décision sur l'acquisition ou non d'un Dispositif d'Assistance Physique
adapté à la situation. Dans le but d'évaluer au mieux
l'exosquelette adapté à la situation, c'est à dire
répondre aux besoins et aux attentes, connaître
l'acceptabilité de l'utilisateur, etc., il est indispensable
d'intégrer les acteurs concernés, des concepteurs aux
utilisateurs, afin de maîtriser les enjeux de la mise en place d'un
dispositif d'assistance physique. Il faut donc avant tout créer un
groupe de travail qui ne sera dissous qu'à la fin de la phase 3 lorsque
l'intégration de l'exosquelette sera finalisée.
Avant de pouvoir prendre une décision sur l'acquisition
d'un DAP, il faut réaliser une analyse complète de la charge
physique de travail grâce à l'ED 6161 de l'INRS.
Une phase de repérage du risque est une première
étape. Les données sur lesquels le groupe de travail peut
s'appuyer sont les suivantes :
- Document Unique d'Évaluation des Risques Professionnels
(DUERP)
- Différentes plaintes des opérateurs
- Indicateurs de santé au travail et de gestion du
personnel (Maladies professionnelles (MP), Accident du travail (AT),
absentéisme, turnover, etc.)
18
Mémoire professionnel Master 2
Ergonomie
Vient ensuite une analyse plus approfondie de la charge
physique de travail pouvant engendrer des Troubles Musculo-Squelettique
comprenant :
- Les efforts physiques importants ou répétitifs
: lever-pousser-tirer, distance de déplacement, qualité de prise,
etc.
- Les contraintes temporelles
- Les facteurs environnementaux : température, bruit,
humidité, vibration, etc.
- Les facteurs organisationnels : travail posté ou de
nuit, formations des salariés aux risques professionnels du poste,
etc.
- Les facteurs individuels : liés aux
caractéristiques de chacun, l'âge, la résistance physique,
etc.
Se construit ensuite l'étape de recherche de pistes de
prévention en se basant sur les neufs principes généraux
définis par l'article L.4121-2 du code du travail décrit
ci-dessous.
1- Éviter les risques, en supprimant le danger ou son
exposition.
2- Évaluer les risques, en quantifiant l'exposition au
danger afin de prioriser les actions de prévention.
3- Combattre les risques à la source, en
intégrant la prévention le plus tôt possible, dès la
conception des équipements ou des postes de travail.
4- Adapter le travail à l'homme, en tenant compte des
différences interindividuelles.
5- Tenir compte de l'évolution de la technique.
6- Remplacer ce qui est dangereux par ce qui l'est moins, en
réduisant au maximum l'utilisation d'un produit ou d'un
procédé dangereux si un même résultat peut
être obtenu avec moins de risques.
7- Planifier la prévention en intégrant
technique, organisation et conditions de travail, relations sociales et
environnement.
8- Donner la priorité aux mesures de protection
collective avant les équipements de protection individuelle.
19
Mémoire professionnel Master 2
Ergonomie
9- Donner les instructions appropriées aux
salariés, en les formant et les informant sur les risques auxquels ils
sont exposés ainsi que les mesures de prévention existante.
D'après cet article du code du travail il est donc
important de prioriser les mesures de préventions collectives avant
d'envisager l'usage d'un Dispositif d'Assistance Physique et si ce dernier peut
répondre au besoin identifié.
2.3.1.2. Description détaillée des
tâches nécessitant une assistance physique spécifique
Une fois que l'analyse complète de la charge physique
de travail a été faite et que la décision de l'acquisition
d'un Dispositif d'Assistance Physique a été validé, il
faut désormais s'interroger sur les tâches spécifiques de
l'opérateur qui pourrait être aidées par un exosquelette
adapté.
L'importance de cette étape est de tenir compte des
différentes spécificités de la tâche, des
contraintes qu'elle peut créer, des caractéristiques
individuelles des opérateurs, du facteur environnemental, etc.
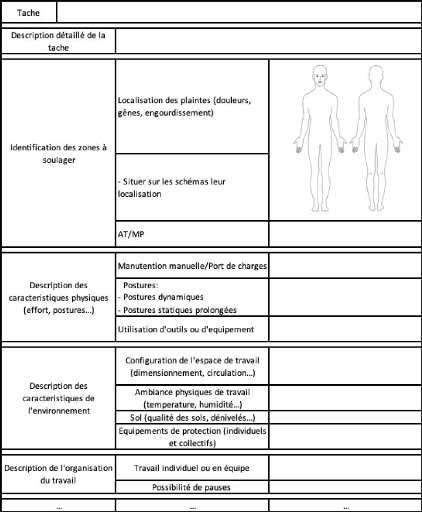
Pour cela, remplir une fiche-tâche est utile et permet
de faire une description de toutes les tâches présentant une
charge physique élevée. On aura donc un état des lieux
plus précis des besoins d'assistance physique et ainsi choisir au mieux
l'exosquelette le plus adapté à la situation. (Fiche-tâche
présente en annexe 1)
A la fin de cette étape, les différentes
caractéristiques de la tâche sont étudiées pour
définir au mieux le cahier des charges (CdC) de l'exosquelette
idéal.
2.3.1.3. Validation des caractéristiques de
l'exosquelette
Le but de cette partie est de valider, avec le groupe de
travail, le cahier des charges de l'exosquelette, et trouver le compromis
idéal entre l'assistance et l'activité réelle. La
fiche-tâche remplie précédemment permettra de
définir précisément les objectifs que devra remplir
l'exosquelette.
20
Mémoire professionnel Master 2
Ergonomie
L'INRS propose une liste non exhaustive de question permettant
l'identification des caractéristiques d'un exosquelette adapté
:
- Quelles sont les intentions de départ ?
- Quels sont les rapports et limites ?
- Quelles zones corporelles nécessitent une assistance
?
- Quelles sont les fonctions d'assistance souhaitées pour
l'exosquelette ?
- Quelles sont les conditions de réalisation de la
tâche à considérer avec
l'exosquelette ?
- Quels sont les besoins de réglages spécifiques de
l'exosquelette pour prendre en
compte la variabilité des tâches et la
variabilité interindividuelle des opérateurs ?
À la suite de cela, de nombreuses questions peuvent se
poser concernant la prévention des risques professionnels de l'usage de
l'exosquelette en situation réelle de travail. Ces risques
éventuels, présentés ci-après, ont
été identifiés grâce aux différentes
études existantes ainsi qu'aux observations de terrain.
- Les risques associés aux machines en
général, si l'exosquelette est actif : mécaniques,
électriques, thermiques, liés aux bruits ou aux vibrations.
Certains exosquelettes, à cause de leur encombrement, peuvent
présenter des risques de collisions, avec des collègues ou
l'environnement.
- Risques de troubles proprioceptifs : certains DAP peuvent
causer des troubles proprioceptifs perturbant l'opérateur le portant,
causant ainsi des risques de perte d'équilibre ou de chutes. De plus,
c'est une fatigue cognitive supplémentaire pour le portant si
l'exosquelette est mal réglé ou mal conçu.
- Des risques liés à la charge physique de la
tâche : certains exosquelettes actifs peuvent être imposants en
taille mais également en poids, cela peut conduire à
l'augmentation des sollicitations physiques et cardiovasculaires
- Risques liés à l'organisation du travail
L'analyse de ces risques est essentielle, ils sont
discutés par le groupe de travail et importés dans le cahier des
charges, le but est de les prévoir le plus tôt possible lors du
choix ou de la création du DAP.
21
Mémoire professionnel Master 2
Ergonomie
A la fin de cette phase 1, les différentes
caractéristiques et fonctionnalités de l'exosquelette sont
retenues et notifiées dans le CdC, et le groupe de travail s'entend sur
l'exosquelette le plus adapté.
2.3.2. Phase 2
La deuxième phase est une évaluation de
l'interaction entre l'opérateur et l'exosquelette, évidemment
après les différentes périodes de familiarisation et
d'apprentissage de l'utilisation de l'exosquelette qui seront vu par la suite.
C'est une phase qui permet de se rendre compte de la bonne intégration
ou non de l'exosquelette.
Les cinq critères permettant de définir la
pertinence de l'usage d'un exosquelette plutôt qu'un autre sont les
suivants : l'appropriation, l'utilité, l'utilisabilité, l'impact
et la sécurité (INRS).
- L'appropriation est un critère qui
permet de mettre en avant si l'opérateur a intégré
l'exosquelette dans son activité parmi les différents outils dont
il dispose. Cela peut être mis en avant grâce à un
questionnaire afin d'avoir le ressenti de l'opérateur, s'il y a des
gènes ou des douleurs, si l'exosquelette est maîtrisé et
accepté, etc.
- L'utilité permet d'évaluer la
pertinence et l'efficience du dispositif d'assistance physique. Le respect de
la qualité de l'opération, la durée d'assistance active
durant la tâche font également partie du critère
d'utilité.
- Le critère d'utilisabilité
permet d'évaluer la facilité d'utilisation de
l'exosquelette, mais aussi sa facilité de mise en place, de
réglage, sa facilité de maintenance et de nettoyage et si
l'opérateur n'est pas gêné dans la réalisation de sa
tâche.
- L'impact est un critère permettant
d'estimer les modifications de stratégie opératoire de
l'opérateur, si sont présentes des contraintes physiques,
cognitives ou impactant la santé, cela permet également
d'évaluer s'il y a de l'influence sur l'environnement et sur le travail
des collègues.
- La sécurité est un
critère se rapprochant de l'impact, il permet d'évaluer les
risques pour l'opérateur et pour son environnement, cela prend
également en
22
Mémoire professionnel Master 2
Ergonomie
compte les risques qui pourraient survenir par une mauvaise
utilisation de l'exosquelette.
2.3.2.1. Sélection des outils
d'évaluation
Les outils d'évaluation à notre disposition
peuvent être de deux sortes, soit objectif en mesurant les
paramètres physiologiques, physiques, biomécaniques de
l'opérateur, soit subjectif en mesurant la perception humaine de la
situation. Il est important d'associer les deux sortes d'outils car ils se
complètent l'un l'autre.
Les outils présentés par la suite varient en
fonction des critères que l'on compte évaluer, des dimensions que
ces outils peuvent mesurer ainsi que des ressources à mettre en place.
Pour certains de ces outils seul un ergonome peut être en mesure de s'en
servir.
Le DUERP de l'entreprise permet d'évaluer le
critère de la sécurité en analysant les différents
risques de la situation de travail. L'échelle de Borg est une
évaluation qui permet de quantifier un effort perçu, elle peut
être soit objective et se rapporte au pourcentage de la fréquence
cardiaque maximal de l'opérateur soit être subjective et
être noté selon une perception de l'opérateur.
L'échelle de Borg permet d'évaluer le critère de l'impact.
Afin de quantifier la douleur et les gênes perçues, il existe le
questionnaire nordique, il fait partie des outils que les Service de
Santé au Travail (SST) peuvent utiliser pour dépister les TMS.
Dans notre cas, il permettra d'évaluer les critères
d'appropriation, d'utilité, et d'impact. Le dernier d'outils
d'évaluation beaucoup utilisé est la chronoanalyse, cela permet
une analyse temporelle du travail et voir certaines concordances entre les
actions de l'opérateur et les observables (par exemple si durant une
certaine tâche l'opérateur passe 90% de ce temps les bras
au-dessus des épaules, cela permet à l'observateur de le
remarquer graphiquement). La chrono analyse est un outil utilisé pour
les critères d'appropriation, d'utilité, d'utilisabilité
et d'impact.
2.3.2.2. Apprentissage hors situation réelle de
travail
Une phase d'apprentissage hors situation de travail est
idéale et nécessaire pour mettre en confiance l'opérateur
dans le but qu'il accepte au mieux l'exosquelette mais également pour
vérifier qu'il est bien approprié à la situation de
travail ainsi qu'à la tâche.
23
Mémoire professionnel Master 2
Ergonomie
Cette phase d'apprentissage se déroule en deux parties, la
première est une familiarisation avec le DAP et la deuxième est
l'apprentissage de la tâche avec l'exosquelette.
Les critères et les outils vus précédemment
servent à confirmer ou infirmer que l'apprentissage est efficace.
Familiarisation
La familiarisation est une étape de découverte
de l'exosquelette par l'opérateur. Cela permet de construire les
premiers repères (ressenti, fluidité des mouvement, gêne
éventuelle, réglage des différentes
fonctionnalités, prise en main globale, etc.).
Il est important avant tout essai, d'informer le futur
utilisateur des risques encourus spécifiques à l'usage d'un
exosquelette.
Cette étape permet de garantir que les
spécifications et les capacités de réglage du
système correspondent à la structure corporelle de
l'opérateur ; déterminer les actions de l'opérateur sur
lesquelles l'assistance physique est active et les actions sur lesquelles il ne
l'est pas ; identifier les aides et les gènes du dispositif ; etc.
Si la familiarisation avec l'exosquelette est efficace,
l'opérateur équipé peut effectuer des tâches
similaires à la situation de travail pour affiner l'apprentissage.
L'apprentissage est dynamique et se développe au fil du temps. Les
différents réglages de l'exosquelette sont effectués lors
de cette phase mais peuvent également être faits lors de la
situation réelle de travail.
Apprentissage de la tâche reproduite et de son
environnement
L'étape d'apprentissage de la tâche a trois
objectifs. Le premier objectif est de reproduire le plus fidèlement
possible une situation réelle de travail afin de voir comment
l'exosquelette et l'opérateur équipé se comportent. Le
deuxième objectif est de modifier, si nécessaire, la situation de
travail afin d'exploiter au maximum le potentiel de l'exosquelette.
24
Mémoire professionnel Master 2
Ergonomie
Le dernier objectif est, comme durant la familiarisation, de
déterminer les actions sur lesquelles l'assistance physique est active
sur lesquelles elle ne l'est pas.
Durant l'appropriation, il est important de pouvoir
identifier, à l'aide d'un schéma ou d'un dessin, les zones
d'assistance, les zones d'inconfort et les zones où de nouvelles
sollicitations physiques apparaissent.
Il est important de réaliser cette étape
d'apprentissage avec plusieurs opérateurs dans le but d'avoir des avis
différents et optimiser au mieux le choix d'un exosquelette,
malgré cela il est possible qu'un produit corresponde plus à un
opérateur et un second produit a un second opérateur, tous deux
réalisant la même tâche au même poste.
Lorsque le groupe de travail a analysé et validé
les données, l'étape suivante de mise en condition réelle
peut être entamée.
2.3.2.3. Mise en oeuvre en situation réelle de
travail Apprentissage approfondi en situation réelle
La phase d'apprentissage hors situation de travail va
permettre au groupe de travail, d'adapter la situation réelle de travail
en fonction de l'exosquelette et de son utilisation avant son
intégration définitive. Si la nouvelle situation réelle de
travail est significativement différente de la précédente
(temps de cycle, postures, organisation du travail, etc.), il faudra alors
laisser à l'opérateur un temps d'appropriation.
Le temps d'appropriation d'un exosquelette à un
opérateur dépend des facteurs individuels de chacun, ainsi qu'aux
facteurs liés à l'exosquelette, à la tâche et
à l'environnement.
Validation de l'intégration de l'exosquelette
Les 5 critères d'évaluations vu
précédemment doivent, à nouveau, être remis en cause
pour confirmer l'intégration finale de l'exosquelette.
25
Mémoire professionnel Master 2
Ergonomie
En plus de ces critères, il est important de se poser
la question sur différentes caractéristiques : difficulté
ou facilité de réglages, pourcentage du temps de la tâche
ou l'exosquelette est actif, zones d'inconfort ou de gênes,
facilité d'adaptation de l'opérateur à un dispositif
d'assistance, gêne éventuelle dans l'environnement, etc. Il est
également important de se poser la question de l'adaptabilité de
l'exosquelette aux différents opérateurs, auquel cas il faudra
envisager de recommencer toute la démarche pour d'autres utilisateurs et
d'autres modèles d'exosquelette.
A la fin de cette étape, le groupe de travail devra
faire des recommandations pratiques sur les conditions d'utilisation de
l'exosquelette en situation de travail réel : conditions d'utilisation,
modalité pour mettre et enlever l'exosquelette, durée
d'utilisation quotidienne du DAP, etc.
2.3.3. Phase 3
La dernière étape est une évaluation
complète de l'utilisation de l'exosquelette à long, moyen et
court terme. C'est un retour d'expérience.
C'est une phase indispensable et trop souvent oubliée
dans l'intégration d'exosquelettes. Pour l'évaluation à
long terme, il est possible d'être en lien avec le service de
santé au travail afin de constater d'éventuels effets sur la
santé des opérateurs.
Pour une bonne mise en place, l'évaluateur doit avoir
une bonne connaissance de la situation de départ, ainsi que les
objectifs car cela va être un point de comparaison avec les situations de
long, moyen et court terme.
L'évaluation de la phase 3 est présente pour
déterminer l'efficacité de l'exosquelette vis-à- vis des
facteurs liés au salarié ainsi qu'à l'entreprise
(santé globale, satisfaction, AT, turn-over, etc.), pour cela la phase 2
est une bonne source pour alimenter ce retour d'expérience.
26
Mémoire professionnel Master 2
Ergonomie
Cette expertise a pour but d'imposer une culture de
santé au travail en entreprise, tout en prouvant que
l'intégration d'un exosquelette a un impact bénéfique sur
la santé et la sécurité des opérateurs mais
également de la qualité et l'efficacité du travail.
C'est à la fin de cette phase 3 que le groupe de
travail peut être dissocié, l'intégration de l'exosquelette
est finalisée et l'évaluation peut s'intégrer dans le
Document Unique d'Évaluation des Risques Professionnels. La mise
à jour annuelle obligatoire permet de vérifier que le DAP est
toujours aussi efficace malgré les évolutions de la situation de
travail.
2.3.4. Conclusion de l'intégration
D'après Jean-Jacques Atain Kouadio et al., on a vu que
la meilleure intégration possible d'un exosquelette comportait trois
phases. La première est une phase de repérage du risque puis une
analyse et une évaluation complète de la situation de travail
existante. Ce grâce à différentes données d'aide
à l'évaluation tel que le DUERP, le registre des AT et des MP,
puis des outils tel les questionnaires, entretiens et observations. La phase 2
est une phase d'apprentissage hors situation de travail et en situation de
travail après avoir trouvé le dispositif le plus adapté
à la situation en groupe de travail. C'est une phase qui peut prendre
plus ou moins de temps en fonction des facteurs individuel de chacun et de leur
accommodation au dispositif. La dernière phase est une phase de retour
d'expérience à cours moyen et long terme où on
vérifie la bonne intégration du dispositif.
Toutes ces phases, m'ont permis, en tant qu'ergonome, d'avoir
un fil rouge tout au long de cette intégration sur le cas pratique
présenté ci-dessous.
27
Mémoire professionnel Master 2
Ergonomie
3. Cas Pratique
3.1.Intégration en entreprise
Au début de ce stage je me suis penché sur une
mise à jour complète du DUERP, incluant donc une observation de
toutes les unités de travail, et ainsi pouvoir recenser tous les risques
présents dans les deux usines. J'ai porté une attention
particulière à un risque qui me semblait important qui
était le risque postural des chaudronniers. A la suite de cela j'ai pu
faire des observations globales puis spécifiques du poste des
chaudronniers, réalisé des chronogrammes d'activité, faire
des interviews individuelles du ressenti de la douleur et des postures prises
par ces opérateurs. Ainsi on a pu entamer les phases
d'intégration d'un exosquelette comme vu précédemment. Des
phases qui ont été réalisées en collaboration avec
les chaudronniers, leur responsable, la direction du site et la responsable
QHSE.
Suite à ces deux premières phases, et
après avoir testé différents exosquelettes en situations
réelles, il a été décidé de faire l'achat du
Harnais de posture HAPO de chez ErgoSanté.
Malgré une intégration tardive du dispositif
dans l'entreprise par rapport à la durée de mon stage,
l'exosquelette a pu être testé par les chaudronniers sur plusieurs
jours chacun, et sera intégré durablement sur les mois à
venir. Les premiers retours sont qu'il y a un ressenti de vrai support lombaire
sur la position penchée en avant que ce soit pour des tâches
nécessitant du mouvement ou sur des positions statiques.
Néanmoins l'exosquelette présente tout de même quelques
points négatifs, notamment de légères gènes de
mobilité sur des positions très accroupies, ou sur des
déplacements.
3.2.Intérêts et limites
Les principaux intérêts et limites des
exosquelettes lombaires seront tiré de la littérature
scientifique et mis en avant par mes retours personnels sur
l'intégration du harnais de posture HAPO.
28
Mémoire professionnel Master 2
Ergonomie
L'INRS a démontré dans leurs travaux qu'un
dispositif d'assistance lombaire pouvait réduire l'activité des
muscles ciblés de 10 à 80%. Des écarts si grands qui sont
expliqués par le fait que les exosquelettes ne sont pas toujours bien
adaptés à la tâche ou à l'opérateur. C'est
une des premières limites que j'ai pu constater avec mon retour
personnel. L'exosquelette HAPO est certes adaptable mais avec certaines limites
et donc pas adapté à tous. Par exemple, le harnais que nous avons
commandé en taille M (utilisable convenablement de 1m70 à 1m85) a
posé quelques soucis pour les opérateurs en dessous ou au-dessus
de cette fourchette de taille. Au-dessus, les sangles des jambes tenaient mal
et le harnais était moins efficace pour un réglage
équivalent. A l'opposé, les personnes trop petites pour le
harnais, trouvaient désagréable que les tiges de fibre de verre
jaune (cf. figure n°14) remontaient au-dessus des épaules,
ce qui s'avérait peu efficace.
En somme, les différents intérêts et
limites des exosquelettes ciblés sur l'assistance lombaire sont
principalement d'ordre musculaire, postural, au niveau des contraintes
vertébrales et au niveau du ressenti des douleurs.
- Conséquence sur les muscles lombaire (effort et
fatigue)
Globalement, l'efficacité des exosquelettes
ciblés pour l'assistance lombaire a été prouvée
mainte et mainte fois par la littérature scientifique notamment chez les
modèles passifs sur le plan sagittal. Il faut néanmoins rester
vigilant sur la raideur et la «puissance» du système qui
pourrait causer une augmentation de l'effort musculaire de la zone abdominale
lors de la phase de flexion du tronc. Cette augmentation de l'effort des
muscles antagonistes pourrait perturber l'équilibre des forces,
déstabilisant ainsi la stabilité de la colonne vertébrale.
Le but serait donc de trouver le juste équilibre d'assistance afin de
permettre une aide suffisante sur la zone lombaire sans réquisitionner
un effort trop intense de la zone abdominale.
J'ai pu observer que l'exosquelette à assistance
lombaire était efficace pour des tâches de manutention manuelle
mais il semble également efficace lors de tâches statiques
imposant de maintenir le tronc penché en avant. Il permet une baisse du
niveau de force nécessaire et ainsi limiter les signes de fatigue et
également retarder leurs apparitions. Néanmoins j'ai
également pu constater auprès des opérateurs qu'il
était compliqué pour eux
29
Mémoire professionnel Master 2
Ergonomie
de porter le harnais 8h dans la journée. Leurs postures
étant très variées, voire trop variées, cela
nécessite des modifications de réglage en permanence pour
éviter l'effort trop important des muscles antagoniste, en l'occurrence
la ceinture abdominale.
- Conséquence sur la posture
ABDOLI E.M. et STEVENSON J.M. ont démontré que
lorsque les tâches impliquant une flexion du buste sont
effectuées, la baisse de l'effort de la zone lombaire avec un
exosquelette adapté est en partie grâce à une diminution
des mouvements de rotation (-24%) et une diminution de flexion latérale
(-30%). En plus d'une aide physique directe, les exosquelettes ciblés
sur l'assistance lombaire permettent également de restreindre la
mobilité du buste sur les plans dangereux.
Une limite que j'ai mise en évidence est donc un
maintien trop strict, avec certains réglages, ne permettant pas tous les
mouvements et toutes les libertés que le corps a en temps normal, ce qui
a contraint sur certaines tâches ou certains gestes, notamment des
positions accroupies ou des déplacements.
- Conséquence sur les contraintes vertébrales
Il semble que les dispositifs d'assistance physique
ciblée à la zone lombaire peuvent être également un
moyen efficace de réduire les contraintes de compression sur les
vertèbres lombaires.
Lors d'études réalisées par GRAHAM R.B.
et al, il a été estimé que l'usage d'un DAP lombaire lors
d'une tâche de manutention manuel pourrait permettre de réduire
les contraintes de compression sur les vertèbres lombaires d'un peu plus
de 20%.
Mon retour personnel sur le harnais de posture mis en place
n'a malheureusement pas assez duré dans le temps pour avoir un retour
d'expérience à long terme et ainsi constater les
conséquences sur les contraintes vertébrales.
30
Mémoire professionnel Master 2
Ergonomie
- Conséquence sur la perception des douleurs
Il a été observé dans la
littérature scientifique ainsi que de mes retours personnels que l'usage
d'un exosquelette ciblé sur l'assistance lombaire avait un vrai
bénéfice sur la douleur ressenti sur les tâches qui
nécessite une flexion du tronc penché en avant. L'entretien que
j'avais pour habitude de faire en fin de journée avec l'opérateur
qui avait porté le harnais, a souvent été centré
sur le fait que le soutien lombaire se faisait vraiment ressentir et que la
douleur était moindre par rapport à d'habitude.
D'après, Jean THEUREL et Laurent CLAUDON, «
l'intensité des douleurs lombaires en fin de journée de travail
est reconnue comme un facteur de risque de survenue des lombalgies. Les
douleurs lombaires survenant lors d'une activité posturale seraient en
effet à l'origine d'une augmentation de la raideur des muscles
concernés, phénomène aggravant la lombalgie. » Il
paraît donc évident qu'un exosquelette qui permet la
réduction de l'activité des muscles lombaires est
bénéfique pour réduire le risque de lombalgie et des
douleurs qui lui sont liée.
3.3. Suite du projet
La suite du projet sera assurée par Amélie
FEZZOLI, responsable QHSE, pour l'intégration à long terme du
harnais de posture HAPO chez les chaudronniers. Si l'intégration se fait
correctement et est efficace pour chaque opérateur, l'achat
d'exosquelettes personnels et à la taille de chacun pourra être
envisagé.
De plus l'exosquelette sera testé dans les
différents services de l'usine et sur des postes ou les
problématiques posturales sont identiques à celle des
chaudronniers. Par exemple, un des postes ou sera testé le harnais de
posture en condition réel sera un poste de préparateur de
commande en logistique, ou les opérateurs se penche en avant avec des
charges allant jusqu'à 25 kg. Un second poste ou sera testé
l'exosquelette est un poste de déplacement des tubes lorsque ceux-ci
sont coupé à une longueur d'un mètre nécessitant
tout de même une force au niveau des épaules et du dos pour
déplacer une charge d'environ 30kg.
31
Mémoire professionnel Master 2
Ergonomie
Pour une intégration encadrée et afin d'avoir une
trace écrite, un questionnaire individuel a été
créé dans le but de le faire compléter par les
opérateurs testant l'exosquelette sur les semaines et les mois à
venir.
4. Discussion
Au terme de la mise à jour complète du document
unique des deux sites présents chez POLIECO France, il a
été remarqué un fort risque postural sur un secteur
précis de l'usine de Feillens : la chaudronnerie. La volonté
d'intégration d'un dispositif ou d'un robot d'assistance physique a donc
débuté par une série d'observation et de questionnement
des opérateurs, ce qui correspond à la phase 1
d'intégration d'exosquelette d'après Jean-Jacques Atain Kouadio
et al. L'analyse approfondi de la charge de travail des chaudronniers nous a
confirmé la présence du risque physique. Comme expliqué
plus tôt, la normalisation du geste n'est pas présente en
chaudronnerie, chacun réalise sa tâche en fonction de ses propres
facteurs individuels et de ses propres capacités, il était donc
pour nous impossible de supprimer le risque à la source. C'est pourquoi
après la validation des caractéristiques de l'exosquelette, qui
fut la meilleure solution, la phase 2 a pu débuter.
La phase 2 de l'intégration du dispositif a pour but
d'observer l'interaction entre ce dernier et l'opérateur par le biais
d'apprentissage hors situation de travail et en situation de travail.
Différents dispositifs ont pu être testés par les
opérateurs et leur responsable néanmoins cela ne reste que des
tests spontanés. Viens donc un premier point que j'aimerais mettre en
évidence, les essais des dispositifs, qu'ils soient en salle de
réunion ou en situation réel de travail sont trop peu
représentatifs de ce que va ressentir réellement
l'opérateur au bout de ses 8 heures de travail. L'appropriation
complète est censée se faire en plusieurs semaines voire
plusieurs mois, il me parait donc évident de pouvoir faire une location
longue durée du dispositif avant de considérer son achat.
A la suite des 2 phases d'intégration de
l'exosquelette, le harnais de posture HAPO a pu être mis en place en
chaudronnerie et testé sur les différents secteurs de l'usine de
Feillens. L'intégration c'est très bien passé pour
certains opérateurs, pour d'autre, la démarche d'appropriation
était différente voire contraignante. Comme
démontré par l'INRS, il est compliqué de trouver le
modèle adapté et adaptable pour tous. C'est pourquoi durant
32
Mémoire professionnel Master 2
Ergonomie
cette intégration, le rôle de l'ergonome est
très important pour trouver un compromis. Malgré cela, il a
été plus simple pour certain de le prendre en main et de voir un
réel gain à long terme.
Conclusion
Nous avons pu voir tout au long de cet écrit le
rôle des exosquelettes présent sur le marché, qui est
principalement de préserver l'homme au travail en réduisant les
contraintes physiques dues à certaines tâches. Les dispositifs
existants peuvent être robotisés ou non fonctionnant dans ce cas
grâce à des ressorts, des élastiques ou des amortisseurs
pneumatiques. Chaque produit étant spécifique au maintien d'une
zone du corps, mais également spécifique à certaines
gestuelles, il ne faut pas que les entreprises prennent les exosquelettes comme
une solution miracle et l'utilise à mauvais escient dans le but
«d'augmenter» leurs opérateurs.
Ainsi nous avons déterminé le rôle
déterminant de l'ergonome au sein du groupe de travail pour une
intégration réussie d'un dispositif ou d'un robot d'assistance
physique. En partant des phases d'observation et d'analyse, du choix commun
d'un dispositif adapté, puis de l'interaction entre l'opérateur
et l'exosquelette, de la mise en situation réelle et enfin du retour
d'expérience, nous avons constaté qu'un ergonome devait
être présent le long de toutes ces phases, faisant le lien entre
l'opérateur et sa santé au travail.
En définitive cette expérience professionnelle
fut l'opportunité de prendre conscience de l'importance de l'ergonome au
sein d'une entreprise pour des missions tel que l'intégration d'un
dispositif d'assistance physique, mais en globalité pour toutes les
missions relatives à la santé ou à la
sécurité des opérateurs. Ce stage m'a du coup permis
d'exploiter mes capacités de management et de gestion de groupe de
travail, de gérer la venue et le partenariat avec des intervenants
extérieurs, de savoir écouter et apprendre des différents
discours du personnel, etc., tout cela pour mener à bien mes
différents objectifs chez Polieco France.
33
Mémoire professionnel Master 2
Ergonomie
Bibliographie
Abdoli-E, M., & Stevenson, J. M. (2008). The effect of
on-body lift assistive device on the lumbar 3D dynamic moments and EMG during
asymmetric freestyle lifting. Clinical Biomechanics (Bristol, Avon),
23(3), 372-380.
https://doi.org/10.1016/j.clinbiomech.2007.10.012
ABRAM, X. A. (2019). Développement d'un système
d'assistance à la marche pour les personnes en perte d'autonomie.
ÉCOLE DE TECHNOLOGIE SUPÉRIEURE UNIVERSITÉ DU
QUÉBEC.
AFNOR. (2017). Dispositif d'assistance physique à
contention de type exosquelette robotisés ou
non. AC Z68-800.
Article L4121-2--Code du travail--Légifrance. (s.
d.).
https://www.legifrance.gouv.fr/codes/article
lc/LEGIARTI000033019913/
Atain-Kouadio, J.-J., & Sghaier, A. (2017). Les robots
et dispositifs d'assistance physique: État des lieux et enjeux pour la
prévention (Research Report Notes scientifiques et techniques NS
354; p. 44 p.). Institut National de Recherche et de Sécurité
(INRS).
https://hal.archives-ouvertes.fr/hal-01808404
Davis, K. G., & Kotowski, S. E. (2014). Postural
variability: An effective way to reduce musculoskeletal discomfort in office
work. Human Factors, 56(7), 1249-1261.
https://doi.org/10.1177/0018720814528003
34
Mémoire professionnel Master 2
Ergonomie
De Looze, M. P., Bosch, T., Krause, F., Stadler, K. S., &
O'Sullivan, L. W. (2016). Exoskeletons for industrial application and their
potential effects on physical work load. Ergonomics, 59(5),
671-681.
https://doi.org/10.1080/00140139.2015.1081988
Exosquelettes. (s. d.). COBO4YOU.
https://www.cobo4you.com/fr/applications/exosquelettes.html
Exosquelettes. Ce qu'il faut retenir--Risques--INRS. (s.
d.).
https://www.inrs.fr/risques/exosquelettes/ce-qu-il-faut-retenir.html
Graham, R. B., Agnew, M. J., & Stevenson, J. M. (2009).
Effectiveness of an on-body lifting aid at reducing low back physical demands
during an automotive assembly task: Assessment of EMG response and user
acceptability. Applied Ergonomics, 40(5), 936-942.
https://doi.org/10.1016/j.apergo.2009.01.006
Kiguchi, K., Tanaka, T., Watanabe, K., & Fukuda, T.
(2003). Exoskeleton for human upper-limb motion support. 2,
2206-2211 vol.2.
https://doi.org/10.1109/ROBOT.2003.1241921
Koopman, A. S., Kingma, I., de Looze, M. P., & van
Dieën, J. H. (2020). Effects of a passive back exoskeleton on the
mechanical loading of the low-back during symmetric lifting. Journal of
Biomechanics, 102, 109486.
https://doi.org/10.1016/j.jbiomech.2019.109486
Kouadio, J.-J. A., Kerangueven, L., & Turpin-Legendre, E.
(s. d.). Acquisition et intégration d'un exosquelette en
entreprise. 36.
Kouadio, J.-J. A., Kerangueven, L., Turpin-Legendre, E., &
Theurel, J. (2020). Consensus sur les tests et l'évaluation
d'exosquelettes professionnels en situation de travail, pour une meilleure
35
Mémoire professionnel Master 2
Ergonomie
intégration. Archives des Maladies Professionnelles et
de l'Environnement, 81(5), 434.
https://doi.org/10.1016/j.admp.2020.03.051
Méthode d'analyse de la charge physique de
travail. (2019). ED 6161, 40.
POLIECO FRANCE. (s. d.). Polieco Industrie MPB.
https://www.polieco.com/?lang=fr
Solution pour réduire les troubles
musculo-squelettiquesÑRB3D. (s. d.).
https://www.rb3d.com/
Theurel, J., & Claudon, L. (2018). Exosquelettes au
travail : Impact sur la santé et la sécurité des
opérateurs état des connaissances. 32.
36
Mémoire professionnel Master 2
Ergonomie
Annexes
Annexe 1 : Fiche-tache issu du site de l'INRS
37
Mémoire professionnel Master 2
Ergonomie
Résumé
L'évolution actuelle des sociétés, avec
la volonté de production de plus en plus grande, de plus en plus rapide,
met à rude épreuve au niveau physique tous les hommes et femmes
travaillant dans l'industrie. Dans le but de réduire certaines peines
physiques, beaucoup d'entreprises veulent utiliser des nouvelles technologies
d'aide et d'assistance, notamment des exosquelettes issus initialement des
monde médicaux et militaires. L'erreur commise par beaucoup est un
rapprochement trop rapide entre exosquelette et solution « miracle »
ou de facilité, ainsi les étapes d'intégration sont mal
faites voire inexistante.
Ce mémoire met en avant le rôle essentiel de
l'ergonome pour une bonne intégration d'un dispositif d'assistance. Une
présentation des différents styles et modèle
d'exosquelette avec leurs avantages et leurs inconvénients, ainsi que
les étapes à suivre pour leur bonne intégration est la
trame principale de cet écrit. Pour cela est présenté dans
un cas concret d'intégration d'un dispositif d'assistance physique pour
une problématique de sur-sollicitation lombaire au sein de l'entreprise
Polieco France.
Mots clés
Dispositif d'assistance
physique
Ergonomie
Exosquelette
Groupe de
travail
Intégration
Posture
TMS
| 

