|

MINISTERE DE L'ENSEIGNEMENT SUPERIEUR ET DE
LA RECHERCHE SCIENTIFIQUE
UNIVERSITE
D'ABOMEY-CALAVI
ECOLE POLYTECHNIQUE D'ABOMEY-CALAVI
DEPARTEMENT DE GENIE CIVIL
OPTION :
Bâtiments et Travaux Publics
MEMOIRE DE FIN DE FORMATION
Présenté et soutenu par :
Boris
Sèdjro S. KAGBO
En vue de l'obtention du diplôme
d'Ingénieur de Conception en Génie-Civil

MODELISATION ET SIMULATION PAR ELEMENTS FINIS :
CAS
D'UN TABLIER DE PONT
Thème du mémoire :
Devant le jury composé de :
Dr. SAVY Mathias Président
Dr. HOUINOU Agathe Examinateur
Dr. OLODO Emanuel Rapporteur 1
Pr. ADANHOUNME Villevo Rapporteur 2
Sous la direction de :
Dr. Ing. Emmanuel OLODO
Maître Assistant du CAMES,
Enseignant à l'EPAC / UAC
&
Pr. Villevo ADANHOUNME
Maître de conférences du CAMES, Professeur,
Enseignant à la CIPMA / UAC
Novembre 2014
Certification
Certification
Nous certifions que ce mémoire a été
conduit et réalisé sous notre direction par Monsieur
Boris Sèdjro S. KAGBO au Département de
Génie Civil de l'Ecole Polytechnique d'Abomey-Calavi
(EPAC) avec la collaboration de la Chaire Internationale en
Physiques Mathématiques et Applications (CIPMA).
i /176
Sous la direction de :
Dr. Ing. Emmanuel OLODO
Maître
Assistant du CAMES,
Enseignant à l'EPAC / UAC
&
Pr.
Villevo ADANHOUNME
Maître de conférences du CAMES,
Professeur,
Enseignant à la CIPMA / UAC
ii /176
Dédicaces
Dédicaces
Je dédie ce mémoire à :
Ma mère, qui a oeuvré pour ma réussite,
par son amour, son soutien, tous les sacrifices consentis et ses
précieux conseils, pour toute son assistance et sa présence dans
ma vie, reçois à travers ce travail aussi modeste soit-il,
l'expression de mes sentiments et de mon éternelle gratitude.
Mon père, qui peut voir à travers ce travail le
résultat de longues années de sacrifices et de privations pour
m'aider à avancer dans la vie. Puisse Dieu faire en sorte que ce travail
porte son fruit ; merci pour les valeurs nobles, l'éducation et pour ton
attachement exceptionnel au sens de la responsabilité parentale.
Mes frères et soeurs qui n'ont cessé
d'être pour moi des exemples de persévérance, de courage et
de générosité.
Mes professeurs de l'EPAC qui doivent voir dans ce travail la
fierté d'un savoir bien acquis.
Boris Sosthène S. KAGBO
iii /176
Remerciements
Remerciements
« Tout ce qui est conçu et construit dans ce monde
peut être amélioré
par la simulation. »
L'élaboration du présent mémoire a
été possible grâce au soutien indéfectible et
à la franche collaboration de plusieurs personnes. Je tiens donc
à exprimer mes sincères remerciements et ma profonde gratitude
à :
Dr. Ing. Emmanuel OLODO, Maître
Assistant du CAMES, mon maître de mémoire, pour
avoir accepté d'encadrer ce travail et de le conduire jusqu'au bout. Ce
document n'aurait pu être réalisé sans ses conseils, son
esprit d'écoute, son soutien sans pareils et surtout cette confiance
qu'il a placée en moi ;
Pr. Villevo ADANHOUNME, Maître de
Conférences du CAMES, Professeur, mon co-maître de mémoire,
pour ses apports, son enthousiasme, ses conseils, ses analyses fort
pertinentes, son implication personnelle malgré ses multiples
occupations et pour avoir effectué avec moi un travail d'une rare
qualité à l'occasion de la préparation de ce
mémoire ; je lui dis : « Merci !!! » ;
Pr. Mohamed GIBIGAYE, Maître de
Conférences du CAMES, Enseignant-Chercheur à l'EPAC/UAC, mon
professeur. Pour nous avoir enseigné avec tant de dévotion ; pour
nous avoir inculqués constamment, la rigueur au travail et la
persévérance dans toutes nos entreprises ;
Ing. Zinsou Côme AHOUANSOU, mon
parrain, « Aux âmes bien nées, la valeur n'attend point le
nombre d'années ». Vous êtes si jeune, mais
déjà si riche d'expériences. Merci d'avoir accepté
spontanément de travailler avec moi ;
Ing. Thomas Dèkandji EKPO, Directeur
Général du bureau d'étude PERS-BTP, pour m'avoir
encadré lors de mon stage, pour
iv /176
Remerciements
votre promptitude quand il s'est agi de mettre à ma
disposition un projet réel et pour m'avoir prodigué des
encouragements personnels très utiles dans les périodes de doute.
Vos conseils, au-delà de cela, m'ont été d'une grande
utilité ;
Pr. Gérard GBAGUIDI AISSE,
Maître de Conférences du CAMES, Enseignant-Chercheur à
l'EPAC/UAC, mon professeur. Pour tous les conseils qu'il nous a procurés
lors de notre cursus à l'EPAC ;
Pr. Victor GBAGUIDI, Maître de
Conférences du CAMES, Enseignant-Chercheur à l'EPAC/UAC, mon
professeur. Pour nous avoir enseigné avec tant de dévotion ;
M. François TOLLO, mon oncle, je
n'essaierai pas de chercher des formules pour exprimer ma gratitude, je n'en
trouverai sûrement pas. Simplement, merci pour tout ;
Pr. Norbert HOUNKONNOU, Professeur
Titulaire, Président de la Chaire Internationale en Physiques
Mathématiques et Applications (CIPMA-Chaire UNESCO) / UAC. Pour votre
grande disponibilité et vos conseils très instructifs ;
À tous les enseignants de l'EPAC et
en particulier ceux du département de génie civil, pour la
qualité de l'enseignement. Nous voulons citer :
? Pr. ADJOVI Edmond, Maître de
Conférences en Sciences et Techniques de Génie-Civil, Professeur
Titulaire, Enseignant à l'EPAC, Directeur de l'ESTBR-Abomey ;
? Dr. Ing. ALLOBA Ezéchiel,
Maître Assistant du CAMES, Enseignant à l'EPAC ;
? Dr. Ing. BACHAROU Taofick, Maître
Assistant du CAMES, Enseignant à l'EPAC ;
v /176
Remerciements
> Pr. CODO François de Paule,
Maitre de Conférences du CAMES, Professeur, Enseignant à l'EPAC
;
> Dr. Ing. CHAFFA Gédéon,
Maître Assistant du CAMES, Enseignant à l'EPAC ;
> Dr. Ing. DEGBEGNON Léopold,
Maître Assistant du CAMES, Enseignant à l'EPAC, Enseignant
à l'EPAC ;
> Dr. Arch. DIOGO Noël, Docteur
architecte, Enseignant à l'EPAC ;
> Dr. HOUINOU Agathe SOUROU, Docteur
Ingénieur en Mécanique des sols, Enseignant à l'EPAC ;
> Dr. HOUINOU Gossou Jean, Maître
Assistant du CAMES, Enseignant à l'EPAC ;
> Dr. SAVY Mathias, Maître Assistant
du CAMES, Enseignant à l'EPAC ;
> Dr. TCHEHOUALI Adolphe, Maître
Assistant du CAMES, Enseignant à l'EPAC ;
> Dr. WANKPO Tonalémi Epiphane
Sonon, Docteur Ingénieur en Hydraulique, Enseignant à
l'EPAC ;
> Dr. ZEVOUNOU Crépin, Maître
Assistant du CAMES, Enseignant à l'EPAC ;
> Dr. ZINSOU Codjo Luc, Docteur
Ingénieur en Mécanique des sols, Enseignant à l'EPAC ;
> Ing. ZOHOUNGBOGBO Prosper ; >
Ing. Maximin d'ALMEIDA.
Au Professeur Félicien AVLESSI,
Directeur de L'Ecole Polytechnique d'Abomey-Calavi et au Professeur
Martin AINA chef du Département de Génie
Civil.
A tout le personnel du bureau d'étude PERS-BTP pour leur
soutien.
vi /176
Remerciements
A tous les camarades de la 7ème promotion et
plus particulièrement mes amis Ibrahim, Imeldo, Gildas, Samson,
Loïc avec qui nous avons passé cinq (5) mémorables
années de notre vie et pour les nostalgiques moments d'entraide, de
solidarité et de joie.
A mes amis Eric, Hermann avec qui j'ai
passé de très bons moments durant ces cinq années.
Je ne voudrais en aucun cas oublier, mon Père
KAGBO Alain, ma Mère MIGAN Denise, mon
frère Roland, ma soeur Alena, pour
tout leur soutien.
vii /176
Résumé
Résumé
Dans l'ingénierie civile, la modélisation permet
de comprendre les variables qui influencent une structure conçue, afin
de l'optimiser techniquement et de procéder à des
vérifications de stabilité, rigidité et
résistance.
Le présent travail de recherche s'intéresse aux
techniques de modélisation et de simulation
numérique par la méthode des
éléments finis. Il est principalement
structuré en quatre grandes parties. La première partie, qui
tient lieu de généralités, présente les
méthodes d'approximations en physiques et aborde la construction
pratique d'un problème variationnel à travers
l'étude de la déformation, d'un solide, décrit par les
équations de lamé que nous reformulons par les
équations de Poisson et de Laplace.
Avec la prise en compte des conditions aux limites et l'utilisation de la
méthode de GALERKIN, nous résolvons les
équations de Lamé et déterminons le tenseur des
contraintes et des déformations.
La deuxième partie traite de la construction
d'un modèle élément fini, nous
exposons la méthode d'approximation par
élément fini et les principes de maillage d'un
domaine. Les concepts de transformation géométrique
et d'élément de référence
simplifient la construction des fonctions d'interpolation
et des matrices de rigidités
élémentaires. Nous développons également
la technique d'assemblage des matrices
élémentaires pour la résolution du
système d'équations global.
La troisième partie constitue une étude de
certains types d'éléments finis et porte une attention
particulière à l'élément fini
tétraédrique à 12 degrés de
liberté. Nous proposons un programme développé en
FORTRAN pour calculer sa matrice de rigidité
élémentaire.
Dans la dernière partie, nous utilisons le logiciel
Autodesk Robot SAP 2012, pour modéliser par
éléments finis, les éléments d'un tablier de pont ;
il s'agit du pont à construire sur le tronçon 1 :
Frontière TOGO-TCHETTI SAVALOU, au PK 23 + 200. Nous effectuons une
simulation numérique sur le tablier, pris dans son ensemble, et
aboutissons à un dimensionnement de chacun de ses
éléments.
Mots clés :
modélisation, simulation, éléments finis, équations
de Lamé, GALERKIN, maillage, éléments de
référence, fonctions d'interpolations, matrice de
rigidité, degré de liberté, assemblage.
viii /176
Abstract
Abstract
In civil engineering, modeling makes it possible to understand
the variables that influence a structure designed to optimize technically and
conduct audits of stability, stiffness and strength.
This research work focuses on modeling techniques and
numerical simulation by finite element method. It is mainly divided into four
main parts.
The first part, which takes the place of generality, these
approximation methods in physics and discusses the practical construction of a
variational problem through the study of the deformation of a solid, described
by the Lame's equations by reformulating the Laplace and Poisson's equations.
With the consideration of the boundary conditions and the use of the GALERKIN
method, we solve the Lame's equations and determine the stress tensor and
deformation.
The second part deals with the construction of a finite
element model, we present the method of approximation by finite element mesh
and the principles of a domain. The concepts of geometrical transformation and
for reference simplify the construction of the interpolation function and
elementary stiffness matrices. We are also developing the assembly of the
elementary matrices to the technical resolution of the overall system of
equations.
The third part is a study of certain types of finite elements
and pays particular attention to the finite element tetrahedral 12 degrees of
freedom. We propose a system developed in FORTRAN to calculate the elementary
stiffness matrix program.
In the last part, we use the Autodesk Robot 2012 SAP software
for finite element model, the elements of a bridge deck; it is the bridge to be
built on the section 1: TOGO-Tchetti SAVALOU Frontier, PK 23 + 200. We perform
a numerical simulation on the apron, taken as a whole, and end up with a design
for each of its elements.
ix /176
Sommaire
Sommaire
Certification i
Dédicaces ii
Remerciements iii
Résumé vii
Abstract viii
Sommaire ix
Liste des figures xii
Liste des tableaux xviii
Liste des symboles et abréviations
xix
Avant-propos xxi
Introduction générale 1
Chapitre 1 : Méthodes d'approximations en
physiques 3
1.1. Modélisation et Simulation 4
1.2. Classification des systèmes physiques
4
1.3. Processus d'analyse d'un problème physique
5
1.4. Méthodes d'approximations 7
1.5. Définition d'un problème de
l'élasticité linéaire 8
1.6. Méthode de GALERKIN pour la
résolution des équations de Lamé 12
Chapitre 2 : Méthode des Eléments finis
28
2.1. Processus d'analyse par la méthode des
éléments finis 29
2.2. Discrétisation géométrique
(maillage) 32
2.3. Approximation nodale 39
2.4. Approximation par éléments finis
41
2.5. Définition de la géométrie
des éléments 43
x /176
Sommaire
2.6. Approximation sur un élément de
référence 49
2.7. Construction des fonctions d'interpolations et de
transformations
géométriques 53
2.8. Matrice élémentaire 59
2.9. Assemblage et conditions aux limites
60
Chapitre 3 : Etude de quelques exemples
d'éléments finis 62
3.1. Elément fini linéaire à deux
noeuds 63
3.2. Elément fini triangulaire plan à
trois noeuds 64
3.3. Elément fini tétraédrique
à quatre noeuds 66
Chapitre 4 : Modélisation et Simulation
numérique d'un tablier de pont 90
4.1. Matériels employés pour la
simulation 91
4.2. Présentation générale de
l'ouvrage 92
4.3. Caractéristiques du Tablier 94
4.4. Définition des charges et actions
appliquées à la structure 99
4.5. Définition du flux de travail
109
4.6. Définition de la structure 110
4.7. Construction du modèle
éléments finis (EF) 116
4.8. Introduction des conditions de fixations (Appuis)
118
4.9. Choix des normes et règlements à
utiliser 119
4.10. Définitions des charges 120
4.11. Lancement des calculs de la structure
128
4.12. Résultats de calcul 129
4.13. Définition des combinaisons d'actions
134
4.14. Exploitation des résultats
136
xi /176
Sommaire
Conclusion et perspectives 157
Références bibliographiques
158
Table des matières 162
Annexes 167
xii /176
Liste des figures
Liste des figures
Figure 1.1: Processus d'analyse utilisant un
modèle numérique 6
Figure 1.2: Vue synthétique des méthodes
d'approximation 8
Figure 1.3: Solide de domaine V soumis à des
chargements 10
Figure 1.4 : Représentation 3D du domaine Q
16
Figure 1.5 : Courbe de simulation de la composante
åxx du tenseur des
déformations 25
Figure 1.6 : Courbe de simulation de la composante
åyy du tenseur des
déformations 25
Figure 1.7 : Courbe de simulation de la composante
åzz du tenseur des
déformations 26
Figure 1.8 : Courbe de simulation de la composante
åxy du tenseur des
déformations 26
Figure 1.9 : Courbe de simulation de la composante
åyz du tenseur des
déformations 27
Figure 1.10: Courbe de simulation de la composante
åzx du tenseur des
déformations 27
Figure 2.1 : Organigramme descriptif de la
démarche de résolution MEF 30
Figure 2.2 : (a) - Solide (Poutre en I) ; (b)
Modèle éléments finis 31
Figure 2.3 : Maillage d'un pont de type Bow-string en
vue d'une simulation 33
Figure 2.4 : (a) maillage en 2D (poutre I) ; (b)
maillage en 3D (poutre I) 33
Figure 2.5 : (a) maillage raffiné (plaque) ;
(b) maillage grossier (plaque) 34
Figure 2.6 : Formes géométriques 1D
34
Figure 2.7 : Formes géométriques 2D
35
Figure 2.8 : Formes géométriques 3D
35
Figure 2.9 : Connexions inadéquates entre
éléments 36
xiii /176
Liste des figures
Figure 2.10 : Connexions adéquates entre
éléments 37
Figure 2.11 : Exemple de maillage à exclure
38
Figure 2.12 : Discrétisation
géométrique des frontières courbes 38
Figure 2.13 : Méthodes d'approximation
43
Figure 2.14 : Transformation d'un
élément de référence en élément
réel 44
Figure 2.15 : Transformation d'un même
élément de référence en tous les
éléments réels 45
Figure 2.16 : Exemple d'éléments de
référence à une dimension 47
Figure 2.17 : Exemple d'éléments de
référence à deux dimensions 47
Figure 2.18 : Exemple d'éléments de
référence à trois dimensions 48
Figure 3.1 : Elément de Poutre plan.
63
Figure 3.2 : Elément fini de poutre avec deux
degrés de liberté par noeuds. 63
Figure 3.3 : Elément fini de poutre avec trois
degrés de liberté par noeuds. 64
Figure 3.4 : Elément triangulaire plan à
trois noeuds. 65
Figure 3.5 : Elément triangulaire plan avec
deux degrés de liberté par noeuds.65
Figure 3.6 : Elément de référence
de forme tétraédrique. 66
Figure 3.7 : Capture d'écran
des données en Input du programme matrice_K 88 Figure 3.8 : Capture
d'écran des données en Output du programme matrice_K
89
Figure 4.1 : Vue aérienne du pont
93
Figure 4.2 : Trottoir équipé de
garde-corps 93
Figure 4.3 : Vue de dessus du tablier 94
Figure 4.4 : Vue de dessous du tablier 94
Figure 4.5. Vue en plan générale
96
Figure 4.6 : Coupe longitudinale axiale 97
xiv /176
Liste des figures
Figure 4.7 : Coupe transversale du tablier
98
Figure 4.8 : Convoi de charges du système Bc
103
Figure 4.9 : système Bc en vue transversale et
en plan 103
Figure 4.10 : Système Bt en vue transversale,
longitudinale et en plan 104
Figure 4.11 : Axes de construction créés
dans Autocad 110
Figure 4.12 : Importation des Axes de constructions
110
Figure 4.13 : - Boite de dialogue - Importation des
fichiers dwg/dxf 111
Figure 4.14 : Axes de constructions importés
dans Robot 111
Figure 4.15 : Définition des poutres et
entretoises 112
Figure 4.16 : - Boite de dialogue - Panneaux
112
Figure 4.17 : - Boite de dialogue - Paramètre
de ferraillage, Onglets Général et
Matériaux 113
Figure 4.18 : - Boite de dialogue - Paramètre
de ferraillage, Onglets Paramètre
ELS et Ferraillage 114
Figure 4.19 : - Boite de dialogue - Nouvelle
épaisseur 115
Figure 4.20: - Boite de dialogue - Modèle de
Calcul du panneau 115
Figure 4.21 : Définition de la structure du
Tablier dans Robot 116
Figure 4.22 : - Boite de dialogue - Options de
maillage 117
Figure 4.23 : - Boite de dialogue - Options de
maillage avancées 117
Figure 4.24 : Maillage du tablier 118
Figure 4.25 : - Boite de dialogue - Appuis
118
Figure 4.26 : Système d'appuis du tablier
119
Figure 4.27 : - Boite de dialogue -
Préférence de l'affaire, choix de la norme de
conception 120
Figure 4.28 : - Boite de dialogue - Cas de charge
121
xv /176
Liste des figures
Figure 4.29 : - Boite de dialogue - Charges roulantes
122
Figure 4.30 : - Boite de dialogue - Charges roulantes
123
Figure 4.31 : - Boite de dialogue - Polyligne-contour
124
Figure 4.32 : - Boite de dialogue - Paramètres
de la route 124
Figure 4.33 : Cas 3 - Q_trottoir : Charge
d'exploitation des trottoirs 125
Figure 4.34 : Cas 5 - A(L) : Surcharge A(L)
125
Figure 4.35 : Cas 6 - G_garde_corps : Poids propre
des Garde-corps 126
Figure 4.36 : Cas 7 - G Trottoir : Poids propre
des trottoirs 126
Figure 4.37 : Cas 8 - G_coucheR+etanch : Poids
propre Couche de roulement
& étanchéité
126
Figure 4.38 : Cas 9 - 2 File Bc Poutres : deux files
du convoi de camions Bc 127
Figure 4.39 : Cas 10 - 2 File Bc Dalle : deux files du
convoi de camions Bc 127
Figure 4.40 : Cas 11 - 2 File Bt Dalle : groupes de
deux essieux-tandems 127
Figure 4.41 : Cas 12 - 2 File Bc Dalle, deux files du
convoi de camions Bc 127
Figure 4.42 : - Boite de dialogue - Calcul
128
Figure 4.43 : Cartographie des contraintes
æyy relatives au système de charges
A (Travées 1, 2 et 3) 129
Figure 4.44 : Cartographie des contraintes
æyy relatives aux convois de charges
Bc (Travée 2) 129
Figure 4.45 : Cartographie des contraintes
æyy relatives aux convois de charges
Bc (Travée 3) 130
Figure 4.46 : Cartographie des contraintes
æyy relatives aux groupes d'essieux-
tandems (Travée 2) 130
Figure 4.47 : Cartographie des contraintes
æyy relatives aux groupes d'essieux-
tandems (Travée 3) 130
xvi /176
Liste des figures
Figure 4.48 : Moment fléchissant myy
dû aux systèmes de charge A (Travées 1,
2 et 3) 131
Figure 4.49 : Moment fléchissant myy
dû aux convois de charges Bc aux
convois de charges Bc (Travée 2)
131
Figure 4.50 : Moment fléchissant myy
dû aux convois de charges Bc (Travée 3)
132
Figure 4.51 : Moment fléchissant myy
dû aux groupes d'essieux-tandems
(Travée 2) 132
Figure 4.52 : Moment fléchissant myy
dû aux groupes d'essieux-tandems
(Travée 2) 132
Figure 4.53 : Moment fléchissant maximum dans
la poutre de rive gauche
(Travée 3) 133
Figure 4.54 : Moment fléchissant maximum dans
la poutre intermédiaire
gauche (Travée 3) 133
Figure 4.55 : Moment fléchissant maximum dans
l'entretoise d'about (Travée 3)
134
Figure 4.56 : - Boite de dialogue - composante du cas
134
Figure 4.57 : - Boite de dialogue - Combinaison
135
Figure 4.58 : Cartographie des sections d'aciers
réels dans la direction
principale de portance (lit inférieur)
136
Figure 4.59 : Cartographie des sections d'aciers
réels dans la direction
secondaire (lit inférieur) 137
Figure 4.60 : Cartographie des sections d'aciers
réels dans la direction
principale de portance (lit supérieur)
137
Figure 4.61 : Cartographie des sections d'aciers
réels dans la direction
secondaire (lit supérieur) 138
Figure 4.62 : Schéma de ferraillage dalle sous
chaussée (1/4) 139
Figure 4.63 : Schéma de ferraillage dalle sous
chaussée (2/4) 140
xvii /176
Liste des figures
Figure 4.64 : Schéma de ferraillage dalle sous
chaussée (3/4) 141
Figure 4.65 : Schéma de ferraillage dalle sous
chaussée (4/4) 142
Figure 4.66 : Schéma de ferraillage poutres de
rives (1/4) 144
Figure 4.67 : Schéma de ferraillage poutres de
rives (2/4) 145
Figure 4.68 : Schéma de ferraillage poutres de
rives (3/4) 146
Figure 4.69 : Schéma de ferraillage poutres de
rives (4/4) 147
Figure 4.70 : Schéma de ferraillage poutres
intermédiaires (1/4) 149
Figure 4.71 : Schéma de ferraillage poutres
intermédiaires (2/4) 150
Figure 4.72 : Schéma de ferraillage poutres
intermédiaires (3/4) 151
Figure 4.73 : Schéma de ferraillage poutres
intermédiaires (4/4) 152
Figure 4.74 : Schéma de ferraillage entretoises
(1/3) 154
Figure 4.75 : Schéma de ferraillage entretoises
(2/3) 155
Figure 4.76 : Schéma de ferraillage entretoises
(3/3) 156
xviii /176
Liste des tableaux
Liste des tableaux
Tableau 2.1 : Nombre de monômes nécessaire
pour construire des polynômes
complets 54
Tableau 2.2 : Bases polynomiales complètes et
incomplètes 55
Tableau 3.1 : Tableau des valeurs de la matrice de
rigidité élémentaire de
l'élément tétraédrique
à 4 noeuds (douze degrés de liberté). 84
Tableau 3.2 : Valeurs d'essai pour le test du programme
matrice_K 88
Tableau 4.1 : Charges permanentes 99
Tableau 4.2 : Classe de pont en fonction de la largeur
roulable 100
Tableau 4.3 : Coefficient de dégressivité
transversale de la charge A(L) 101
Tableau 4.4 : Coefficients a1 et a2 102
Tableau 4.5 : Coefficient de dégressivité
transversale bc 104
Tableau 4.6 : Coefficient de dégressivité
transversale bt 104
Tableau 4.7 : Tableau de détermination de la
longueur L pour le calcul de 61 106 Tableau 4.8 : Tableau de
détermination de la valeur de G pour le calcul de 61
106
Tableau 4.9 : Tableau de détermination de la
valeur de G pour le calcul de 62
107
Tableau 4.10 : Tableau récapitulatif des valeurs
de 6 108
Tableau 4.11 : Tableau récapitulatif des valeurs
du produit de coefficients 6*b
109
xix /176
Liste des symboles et abréviations
Liste des symboles et abréviations
[ ] . Matrice quelconque (carrée ou rectangulaire)
{ } . Vecteur (matrice colonne)
< > . Matrice ligne
[ ]t . Matrice transposée
[ ]-1 . Matrice inverse
V . Volume du solide
S . Surface du solide
. Contour
IV . Intégrale sur le volume
IS . Intégrale sur la surface
I . Intégrale sur le contour
Ó . Somme
{u} . Champ de déplacement en un point quelconque
{E} ou [E] . Champ de déformation en un point
quelconque
{æ} ou [æ] . Champ de déformation en un point
quelconque
[H] . Matrice des constantes d'élasticité
{un} . Déplacements nodaux pour un
élément
{fV} . Champ de forces de volume
{fS} . Champ de forces de surface
Ni . Fonction de forme attachée au noeud i
[N] . Matrice des fonctions d'interpolation
[B] . Matrice des fonctions de déformation
[D] . Matrice des opérateurs de dérivation
[K] . Matrice de rigidité de la structure
[Ke] . Matrice de rigidité
élémentaire
xx /176
Liste des symboles et abréviations
{FV} . Forces nodales de volume
{FS} . Forces nodales de surface
{F} . Forces nodales pour la structure
x, y, z . Coordonnées dans le repère
réel (global)
x . Notation simplifiée des
coordonnées : x=< x, y, z >
î, ç, æ . Coordonnées dans
le repère de référence (local)
î . Notation simplifiée des
coordonnées : î=< î, ç,
æ >
A . Section de la poutre
I . Inertie de la poutre
L . Longueur d'un élément
ö . Fonction de pondération
A, p . Coefficients de Lamé
E . Module d'élasticité longitudinale
G . Module d'élasticité transversale
í . Coefficient de Poisson
EDP . Equation aux dérivées partielles
DDL . Degrés de libertés
EF . Eléments finis
MEF . Méthode des éléments finis
xxi /176
Avant-propos
Avant-propos
L
'idée fondamentale derrière la méthode
des éléments finis remonte loin en arrière. Les Grecs par
exemple avaient reconnu que l'on peut approcher la solution d'un
problème complexe en le divisant en problèmes plus simples. On
peut par exemple approcher le périmètre d'un cercle en calculant
le périmètre d'un polygone à n
côtés, pourvu que n soit suffisamment grand. Il
suffit alors de connaitre la longueur d'un segment de droite, problème
beaucoup plus simple que celui de la longueur d'un arc de cercle.
Le présent travail se veut être une base solide
de restitution de connaissances techniques et pratiques indispensables à
la construction d'un modèle élément fini, en vue d'une
simulation numérique.
Nous poursuivrons ainsi deux objectifs. Bien sûr, nous
souhaitons une description relativement classique des principales étapes
de mise en oeuvre de la méthode sur un ordinateur et passer directement
à une illustration à travers notre étude de cas, mais
notre objectif est d'en dégager aussi les bases mathématiques les
plus fondamentales.
On peut se demander s'il y a vraiment besoin de s'attarder
autant sur les aspects plus mathématiques. La réponse nous est
apparue de plus en plus évidente au vu des applications énormes
de cette méthode en ingénierie et des contraintes de
sécurité de plus en plus sévères qui entrent en jeu
de compte.
Les logiciels modernes utilisant la méthode des
éléments finis bénéficient d'une interface
graphique rendant leur utilisation relativement simple. Par ailleurs, un
certain nombre de tâches sont automatisables. On peut donc quasiment
lancer un calcul sur ordinateur sans connaître la méthode.
Cependant, le modèle utilisé risque d'être
inadapté au problème, on aura donc un résultat très
éloigné de la réalité. L'utilisateur doit avoir des
connaissances suffisantes pour être en mesure de :
? maîtriser le modèle, c'est-à-dire utiliser
les options permettant de représenter le plus fidèlement possible
la réalité ;
xxii /176
Avant-propos
· contrôler la qualité du résultat,
détecter les résultats manifestement erronés et juger de
la fiabilité des calculs qui leur sont présentés ;
· interpréter les résultats, et
éventuellement les post-traités, c'est-à-dire utiliser les
résultats pour faire d'autres calculs.
L'utilisation d'un logiciel de résolution par la
méthode des éléments finis est donc faussement simple, ce
qui n'est pas sans poser problème :
Car la manipulation de plus en plus fréquente de ce
genre de technologie par des personnels non spécialistes ou
inadéquatement formés commence à être une source
d'inquiétude très sérieuse, compte tenu des enjeux de
sécurité sous-jacents. De manière générale,
utiliser un logiciel quelconque pour résoudre un problème
d'ingénierie sans en comprendre le fonctionnement est très
dangereux.
Le 1er chapitre est consacré à la
résolution théorique par l'approche variationnelle du
système d'équations de lamé qui est un cas particulier des
équations stationnaires, de l'élasticité linéaire,
modélisant les déformations d'un solide sous l'hypothèse
de petites déformations et de petits déplacements. Nous
illustrons ainsi l'une des méthodes étant à la base des
bases de la méthode des éléments finis.
Le 2ème chapitre est dédié
à l'étude des principes de bases de modélisation par
éléments finis ; il fait notamment ressortir les notions de :
· discrétisation d'un domaine en
éléments de formes connues ;
· matrice des fonctions d'interpolations ;
· matrice de rigidité élémentaire ;
· assemblage des matrices élémentaires.
Le 3ème chapitre aborde l'étude des
propriétés de quelques éléments finis, il s'est
achevé par l'élaboration d'un programme de calcul de la matrice
de rigidité élémentaire pour l'élément fini
tétraédrique à 12 DDL. Ce programme, loin d'être un
programme de résolution complet, est destiné principalement
à être utilisé en tant que routine (sous-programme), dans
un programme global de résolution de modèles
éléments finis.
xxiii /176
Avant-propos
Le 4ème chapitre étudie un cas
pratique de simulation numérique effectué sur un tablier de
pont.
Nous insistons notamment sur le fait que notre travail
ne consiste pas en une étude technique détaillée du pont,
mais à construire un modèle numérique,
élément fini, du tablier et à effectuer une simulation
numérique sur ce modèle.
Le modèle élément fini, ainsi construit,
fait alors office de maquette numérique sur laquelle on observera
l'influence, en temps réel, des différentes actions agissant sur
la structure.
Le travail consistera, en tenant compte de plusieurs essais de
cas de charges, à définir les cas produisant les effets les plus
défavorables et à partir de ces considérations pour
proposer un dimensionnement des éléments du tablier.
Aussi, le présent travail a permis d'expliquer en
détail la manière dont le logiciel Autodesk ROBOT SAP
2012 doit être utilisé pour conduire des essais de
simulation numérique.
1 /176
Chapitre 1
Introduction générale
Le développement de l'informatique a conduit à
de grands changements dans les approches traditionnelles des calculs
d'ingénierie. La méthode de premier plan de résolution
numérique pour une grande variété de problèmes
physiques est la méthode des éléments finis
(MEF).
Les particularités de la MEF qui la placent en position
dominante face à d'autres méthodes telles que : la méthode
des différences finies, la méthode des volumes finis, les
méthodes des éléments de frontière ... etc. ; sont
ces qualités inhérentes telles que:
- la versatilité : la méthode est
appropriée pour résoudre toutes sortes de problèmes
physiques et mathématiques;
- Bonne algorithmisation : l'aptitude à
développer des suites logicielles qui couvrent un large champ
d'applications;
- Bonne stabilité numérique des algorithmes MEF.
Le point central de la méthode des
éléments finis est dans le remplacement de la structure
d'origine, de forme complexe, par un modèle numérique
discrétisé qui représente de manière
appropriée l'essence physique et les propriétés de la
structure d'origine. L'élément le plus important dans ce
modèle est la discrétisation par les éléments
finis. Ce qui suppose la construction d'un ensemble de volumes
élémentaires de formes déterminées (les
éléments finis), combiné en un système uni
(appelé maillage d'éléments finis).
La structure, de forme géométrique complexe, est
représentée comme une union des éléments finis. Les
éléments finis sont considérés comme reliés
les uns aux autres par l'intermédiaire des noeuds, dans lesquels chacun
des trois degrés de liberté de translation et de rotation est
présenté. Les charges extérieures appliquées
à la structure sont converties en forces équivalentes
appliquées aux noeuds des éléments finis. Les restrictions
des mouvements de la structure (Appuis) sont également
transférées aux éléments finis.
2 /176
Chapitre 1
En écrivant un système d'équations pour
chaque élément fini qui est impliqué dans le rapprochement
du système physique d'origine, nous les étudions ensemble et
obtenons un système d'équations pour l'ensemble de la structure.
L'ordre de ce système d'équations est égal au produit du
nombre de noeuds dans la structure et du nombre de degrés de
liberté introduits dans un noeud. Dans un logiciel EF, cela revient
généralement à des dizaines ou des centaines de milliers
d'équations algébriques.
En construisant le système d'équations pour
l'ensemble de la structure et en le résolvant, nous obtenons les valeurs
de la mesure physique recherchée (par exemple, les déplacements)
dans les noeuds du maillage d'éléments finis, ainsi que des
mesures physiques supplémentaires, par exemple, les déformations
et les contraintes.
3 /176
Chapitre 1
Chapitre 1 : Méthodes
d'approximations en physiques
Sommaire
1.1. Modélisation et Simulation 4
1.2. Classification des systèmes physiques
4
1.3. Processus d'analyse d'un problème physique
5
1.4. Méthodes d'approximations 7
1.5. Définition d'un problème de
l'élasticité linéaire 8
1.6. Applications de la méthode de GALERKIN
pour la résolution des
équations de Lamé 12
4 /176
Chapitre 1
1.1. Modélisation et Simulation 1.1.1.
Modélisation
La modélisation est une opération par laquelle
on établit le modèle d'un système complexe. Un
modèle est une représentation mathématique d'un
phénomène complexe auquel on affecte des informations dans le but
d'utiliser les lois de la mécanique générale pour faire
des vérifications de résistance et de rigidité.
1.1.2. Simulation
La simulation est l'un des outils d'aide, de prise de
décision les plus efficaces, à la disposition des concepteurs et
des gestionnaires des systèmes complexes. Elle consiste à
construire un modèle d'un système réel et à
conduire des expériences sur ce modèle afin de comprendre le
comportement de ce système et d'en améliorer les performances.
1.2. Classification des systèmes physiques
Un système physique est caractérisé par
un ensemble de variables qui peuvent dépendre des coordonnées
d'espace (x, y, z) et du temps
t. Le système est dit stationnaire si
ses variables ne dépendent pas du temps. Certaines variables
d du système sont connues à priori :
propriétés physiques, dimensions du système,
sollicitations, conditions aux limites, etc.
D'autres variables u sont inconnues
: déplacements, vitesses, températures, contraintes, etc.
Un modèle mathématique du système permet
d'écrire des relations entre u et
d en utilisant des lois physiques. Ces relations
constituent un système d'équations en u
qu'on est souvent amené à résoudre, le
nombre de degrés de liberté du système
est le nombre de paramètres nécessaires pour définir u
à un instant t donné.
Un système est discret s'il
possède un nombre de degrés de liberté
fini, un système est continu s'il
possède un nombre de degrés de liberté
infini.
Le comportement d'un système discret est
représenté par un système d'équations
algébriques, celui d'un système continu est le plus
souvent représenté par un système
d'équations aux dérivées partielles ou
5 /176
Chapitre 1
intégro-différentielles
associé à des conditions aux limites en
espace et en temps.
Les équations algébriques des systèmes
discrets peuvent être résolues par les méthodes
numériques. Par contre, les équations des systèmes
continus ne peuvent en général pas être résolues
directement. Il est nécessaire de discrétiser ces
équations, c'est-à-dire de les remplacer par des équations
algébriques. La méthode des éléments finis est
l'une des méthodes qui peuvent être utilisées pour faire
cette discrétisation.
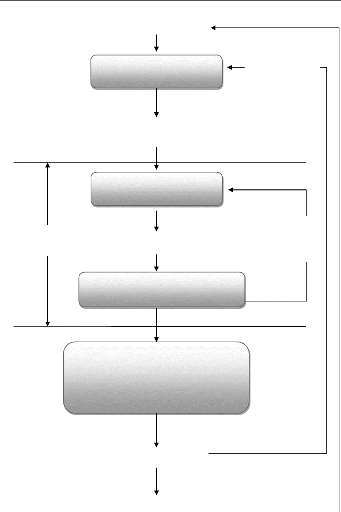
1.3. Processus d'analyse d'un problème
physique
De façon générale, les différentes
étapes d'analyse d'un problème physique s'organisent suivant le
processus schématisé par la figure 1.1. Nous partons d'un
problème physique ; le cadre précis de l'étude est
défini par les hypothèses simplificatrices qui permettent de
définir un modèle mathématique. La difficulté pour
l'ingénieur est de savoir choisir parmi les lois de la physique celles
dont les équations traduiront avec la précision voulue la
réalité du problème physique. Un bon choix doit donner une
réponse acceptable pour des efforts de mise en oeuvre non
prohibitifs.
Le choix du modèle mathématique est un compromis
entre le problème posé à l'ingénieur « quelles
grandeurs veut-on calculer et avec quelle précision ? » et les
moyens disponibles pour y répondre. Les équations du
modèle retenu sont soumises à un certain nombre
d'hypothèses basées sur les sciences de l'ingénieur. Il
faut connaître le domaine de validité de ces hypothèses
pour pouvoir vérifier que la solution obtenue est satisfaisante.
Si le modèle mathématique n'admet pas de
solution analytique, il faut chercher une solution approchée de ce
modèle. La discrétisation du problème correspond au choix
d'un modèle numérique permettant de traiter les équations
mathématiques.
6 /176
Chapitre 1
Modèle numérique
Problème
Hypothèses de modélisation
Modèle
mathématique
Evolution du
modèle
mathématique
Discrétisation du problème
Réponse obtenue
Vérification des hypothèses
de
modélisation (analyse du modèle
mathématique)
Interprétation des résultats
Estimation de la précision du modèle
numérique
Procédure numérique
Evolution du
modèle
numérique
(Nouveau modèle physique)
Figure 1.1: Processus d'analyse utilisant un modèle
numérique
7 /176
Chapitre 1
1.4. Méthodes d'approximations
Pour discrétiser les modèles complexes de
phénomènes physiques, l'ingénieur dispose à l'heure
actuelle de méthodes d'approximation permettant de résoudre la
plupart des problèmes pour lesquels il n'existe pas de solution
formelle.
Toutes les méthodes d'approximation
ont un même objectif, remplacer un
problème mathématique (équations
différentielles ou intégrales) par un problème
mathématique discret (équation matricielle),
problème de dimension finie que l'on sait résoudre
numériquement.
La classification que nous proposons sur la figure 1.2 n'est
pas unique, elle permet simplement de distinguer la méthode, en fonction
de la démarche utilisée pour obtenir une forme intégrale.
La transformation puis la discrétisation de cette forme intégrale
conduisent à une équation matricielle que l'on sait
résoudre analytiquement ou numériquement. Il est important de
noter qu'un problème physique peut être formulé de
façon équivalente en un système d'équations
différentielles ou sous une formulation variationnelle. Nous montrons un
peu plus loin comment passer de l'une à l'autre. Les méthodes
d'approximations sont :
Méthode des résidus
pondérés (ou annulation d'erreur) : Elle utilise
comme point de départ les équations locales et les conditions aux
limites du problème. Ces équations sont des
équations différentielles définies, d'une part sur
l'intérieur du domaine ce sont les équations locales, et d'autre
part sur la frontière du domaine ce sont les conditions aux limites.
Méthodes variationnelles : Le
point de départ de ces méthodes est un principe variationnel
qui est une formulation mathématique du problème
basée sur des considérations énergétiques. La
formulation obtenue dépend bien entendu des hypothèses de
modélisation du problème physique.
Chapitre 1

Système physique continu
Mise en équations

Méthodes
variationnelles

Formes différentielles
8 /176
Méthodes des résidus pondérés
Formes
Méthodes
d'approximation
Discrétisation

Formes matricielles
Figure 1.2: Vue synthétique des méthodes
d'approximation
1.5. Définition d'un problème de
l'élasticité linéaire
1.5.1. Equations fondamentales de la théorie de
l'élasticité
En Théorie de l'élasticité, et sous
l'hypothèse des petites déformations, le nombre d'inconnus pour
un problème de mécanique des milieux continus est égal
à 15.
En effet, l'objectif est de déterminer :
Chapitre 1
- Les trois composantes du champ de déplacement A =
(u, v, w) :
( )
( )
( )
- les six composantes du tenseur de petites
déformations :
( )
( )
( )
- les six composantes du tenseur des contraintes :
Pour résoudre un tel problème, nous devons
disposer de 15 équations. Ces équations sont :
|
Les trois équations d'équilibre [2]
:
|
|
|
|
|
|
|
Sur V :
9 /176
10 /176
Chapitre 1

Figure 1.3: Solide de domaine V soumis à des
chargements
Les six relations géométriques de Cauchy
[2] :
Ces équations assurent que les déformations
dérivent d'un champ de déplacement
( )
( )
( )
La loi de Hooke sous forme directe pour un
matériau isotrope, élastique et linéaire [2] :
( )
( )
( )
Ces équations sont assorties de conditions aux limites
en pression ou en déplacement :
11 /176
Chapitre 1
Sur Sf : {
Sur Su :
1.5.2. Les différentes méthodes de
résolution
La résolution des équations de la théorie
de l'élasticité peut être menée de plusieurs
manières en fonction des quantités prises comme inconnues et on
distingue généralement trois grandes méthodes de
résolution :
- La résolution du problème en fonction des
déplacements : dans ce cas, on considère que les fonctions
inconnues sont les composantes : u, v, w du vecteur déplacement ;
- La résolution en fonction des contraintes : dans ce
cas, on considère que les fonctions inconnues sont les composantes des
contraintes normales et tangentielles ;
- La résolution du problème sous forme mixte :
dans ce cas, on considère comme fonctions inconnues, une partie des
fonctions déplacements et l'autre partie des fonctions contraintes.
En théorie de l'élasticité, l'on
est souvent conduit à résoudre les équations de
Lamé qui constituent un modèle décrivant le comportement,
en déformation, d'un solide sous des conditions de chargement et de
fixation connues (conditions aux limites).
La résolution du problème de la théorie
de l'élasticité consiste à déterminer en tout point
des coordonnées cartésiennes un vecteur de composantes u, v, w
caractérisant un petit déplacement de ce point au cours de la
déformation du milieu.
Nous proposerons dans la suite la méthode de GALERKIN
pour la résolution des équations de Lamé, afin de simuler
le comportement d'un solide à surface lisse, sous des conditions aux
limites en déplacement et soumis à un chargement volumique.
12 /176
Chapitre 1
1.6. Méthode de GALERKIN pour la
résolution des équations de Lamé
1.6.1. Modèle mathématique
étudié
Supposons qu'un solide élastique occupe dans
l'espace à trois dimensions un domaine 0 délimité par une
surface fermée S.
Nous obtenons les équations de Lamé,
caractérisant le comportement, sous la forme suivante [2] :
(A+u) V ( divA) (1.1)
Avec la condition aux limites en déplacement (condition
de type Dirichlet) :
(1.2)
Où A et u sont les coefficients de lamé
tels que :
(1 + v)(1 -- 2v)
(1 + v) , 2 (À. + u)
(y étant le coefficient de poisson et E le module
de Young)
A = A(x, y, z) = ( u(x, y, z) , v(x, y, z) , w(x, y, z)) E
R3 sont les
composantes du vecteur déplacement en chaque point du
solide de 0 délimité par la surface S.
Ao = (uo, vo,wo) est le vecteur
déplacement imposé à la surface du solide ; p est
la densité du solide.
P = ( P1, P2, P3) la
charge constante.
1.6.2. Transformation du modèle
mathématique L'équation vectorielle (1.1) peut
alors s'écrire sous la forme :
Chapitre 1
( ) ( )
( ) ( ) (1.3)
( ) ( )
Nous allons chercher la solution de ces équations sous la
forme
,
Où est un vecteur harmonique
c'est-à-dire : ,
???????????
est le gradient d'une fonction scalaire
c'est-à-dire : Nous adoptons les hypothèses suivantes
:
13 /176
{ (1.4)
(1.6)
Puisque ( ), on a :
{
En substituant (1.6) dans (1.3) on a :
|
(
|
|
, (
|
|
(
|
|
(
|
|
|
)
|
)
|
)
|
)-
|
|
(
|
|
|
|
|
|
|
|
|
)
|
, (
|
)
|
(
|
)
|
(
|
)-
|
|
(
|
|
, __ (
|
|
(
|
|
(
|
|
|
)
|
__)
|
)
|
)-
|
(1.7)
En prenant en compte (1.5), le système
d'équations (1.7) devient :
Chapitre 1

( ) , ( ) ( ) ( )-

( ) , ( ) ( ) ( )-

( ) , ( ) ( ) ( )-
(1.8)
En réorganisant le système
d'équations ci-dessus, on aboutit au système suivant
:
, ( )-
0 ( )1 (1.9)
{ , ( )-
|
(1.9)
|
|
,(
|
)
|
(
|
)
|
|
,(
|
)
|
(
|
)
|
|
{
|
,(
|
)
|
(
|
)
|
|
|
|
|
-
- (1.10)
-
14 /176
L'intégration de ce système
d'équations nous donne :
( )
( )
( ) ( )
( ) .. ( )
|
(1.11)
|
Où f1, f2, f3 sont des fonctions arbitraires.
Sans perdre la généralité et pour la
compatibilité du système, nous supposons que :
( ) ( )
( ) ( ) (1.12)
( ) .. ( )
15 /176
Chapitre 1
En substituant (1.12) dans (1.11), on
ramène le système (1.11) sous forme de l'équation de
Poisson:
( ) ( ) (1.13)
En remplaçant dans cette équation le coefficient
de Poisson par son expression, on obtient :
( ) , ( ) (1.14)
1.6.3. Résolution de l'équation de Poisson
par l'approche variationnelle de GALERKIN
1.6.3.1. Méthode de GALERKIN
La méthode de GALERKIN consiste en ce qui suit :
Nous cherchons une solution de l'équation de
Poisson (1.15) sous la forme d'une combinaison linéaire de
fonctions linéairement
indépendantes vérifiant la condition aux
limites (1.4), c'est-à-dire Ø/S=0.
On substitue la solution approchée dans (1.15) et on
multiplie par les fonctions linéairement indépendantes ; ensuite
on intègre par partie suivant le domaine 0 pour obtenir
une relation intégrale à partir de laquelle on détermine
les coefficients de la combinaison linéaire.
1.6.3.2. Application de la méthode de GALERKIN
En multipliant l'équation (1.14) par une fonction
non nulle on a :
( ( )
, ( )-)
En intégrant suivant 0, on obtient :
|
(1.16)
|
? ( ( ) , ( )-) (1.17)
16 /176
Chapitre 1
? ( )
( ) ? , ( )-
(1.18)
Par une intégration par parties, on a :
? ( ) ? , (
( )
|
)-
pour ö/S = 0.
En posant , on a :
? (. / ( ) ? , (
. / . / )
)-
|
(1.19)
(1.20)
|
Pour l'application, nous considérons le domaine
d'intégration 0 défini par :
* ( )
+
Figure 1.4 : Représentation 3D du domaine
0
17 /176
Chapitre 1
Considérons la partie S1 de la surface S
définit par :
* ( ) +
La condition se présente alors comme un cas
particulier de
la condition aux limites (1.4)
Les conditions aux limites (1.4) et (1.5) sont
équivalentes aux conditions suivantes :
{ (1.21)
{ (1.22)
{ (1.23)
Choisissons un point arbitraire ( )
( ) ( ) les fonctions prennent les valeurs
suivantes :
( ) les fonctions prennent les valeurs suivantes :
( )
( ( ) ) ( ) ( ) ( )
( )( )
( )
18 /176
Chapitre 1
( ) ( )( )
En posant ( ) ( ) ( )
Nous avons :
Posons ( ) ( )( )
Prenons dans un premier temps, le premier membre de
l'égalité (1.20) :
?(( ) ( ) ( ) )
? ? ? (( ) ( ) ( ) )
( ) ( )( )
( ) ( )
( ) ( )
( ) ( )( )
Le calcul de l'intégrale nous donne :
? ? ? (( ) ( ) ( ) )
? ? ? (( ( ) ) ( ( ) )
( ( )( )) )
Chapitre 1
? ? ? (( ) ( ) ( ) )
(
)
? ? ? (( ) ( ) ( ) )
( )
(
( ) ( )
( )
)
En posant :
( ( )
( ) ( )
( )
)
On a alors ? ? ? ( )
19 /176
En prenant le deuxième membre de
l'égalité (1.20), on a :
20 /176
Chapitre 1
|
?, ( )-
|
|
( )
|
|
?, ( )-
n
|
|
( )
|
L'intégration sur le domaine Ù nous donne
:
( ) ?, ( )-
( )
( ) ,( ) (
( ) ( )
)
-
( )
( ) ?, ( )-
( )
( ) , ( ) ( ( )
( ) ( )
) -
En posant :
, ( ( ) ( ) )
( )
( ) ( )
-
Nous avons :
( ) ?, ( )-
( )
21 /176
Chapitre 1
( )
1
En substituant chaque membre de la relation (1.20) par son
expression, nous pouvons écrire :
( ) ( )
La fonction de l'équation différentielle
peut alors s'écrire :
( ) ( )( )
( )
Avec :
( ( )
( ) ( )
( )
)
( ) ( )
,( ) ( )
( ) ( )
-
( ) ( ) ( )
Les composantes du vecteur déplacement
s'écrivent alors:
Chapitre 1
( )
+ ( ( )
)
( )
( ) ( ) ( ) + (
)
. ( ) /
22 /176
(1.24)
1.6.3.3. Détermination du tenseur des
déformations Le calcul du tenseur des déformations nous
donne :
( )
( )
( )
( )
( )( )
( )
( ( ) )
( ) ( )
( )
( )
1.6.3.4. Détermination du tenseur des contraintes
Le calcul du tenseur des contraintes donne :
23 /176
Chapitre 1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
*
)(
|
|
(
|
|
|
)(
|
|
|
)
|
|
|
|
|
|
|
|
|
(
|
|
(
|
|
|
|
)
|
(
|
)
|
)
|
|
(
|
)(
|
(
|
|
)
|
(
|
|
|
(
|
)
+
|
)
|
|
)
|
|
|
|
|
|
|
)
|
|
(
(
|
|
)
)
|
)
|
|
(
|
|
|
|
*
*
)(
|
|
(
|
|
|
)(
|
|
(
|
)(
|
|
(
|
)
|
(
)+
|
|
(
|
(
|
|
)
)
|
|
|
|
|
|
|
|
(
|
)
|
)
(
|
)
)
|
(
|
(
|
)
|
)(
|
)
|
)
|
|
|
|
(
|
)(
|
(
|
|
)
|
(
|
|
(
|
|
)
|
|
)
|
(
|
)
|
(
)
|
|
(
|
)
( (
|
|
)
|
|
)+
|
|
|
|
|
|
*(
*(
*(
|
|
|
)
)
)
|
(
|
|
(
|
|
+
)
|
|
(
|
)(
|
|
|
)
|
|
(
|
(
|
|
)
)
|
)
|
( (
)+
)+
|
|
)
|
|
)
|
|
(
|
)(
|
|
|
)
|
(
|
(
|
|
|
)
(
|
|
(
|
)(
|
|
|
)
|
|
(
|
|
)
|
(
|
(
|
|
)
|
|
)
|
|
24 /176
Chapitre 1
1.6.3.5. Simulation du tenseur des
déformations
Afin de visualiser aisément la déformation du
domaine, fixons des valeurs pour certains paramètres entrant dans les
calculs.
, Y ,
Choisissons le point 01, ,nZ + Z) E
S\S1, tel que : n = 1, Nous avons alors :
Définissons comme matériau de la structure, un
béton ayant les caractéristiques suivantes :
Module de Young : E = 32000 MPa
Coefficient de Poisson : =0.
Module de cisaillement : G = 16300.00 MPa
Densité : p = 24.53 KN/m3
Pour la valeur z=15, l'état de déformation
se présente comme suit :
La courbe représentative de Exx à une
allure parabolique comme le montre la figure 1.5
Chapitre 1
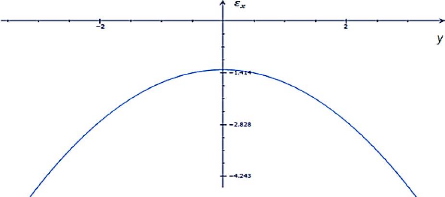
Figure 1.5 : Courbe de simulation de la composante åxx
du tenseur des déformations
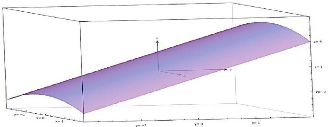
Figure 1.6 : Courbe de simulation de la composante åyy
du tenseur des déformations
25 /176
( )( )
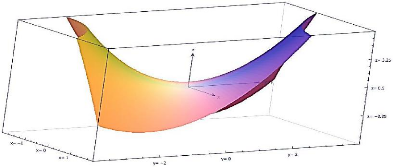
Chapitre 1
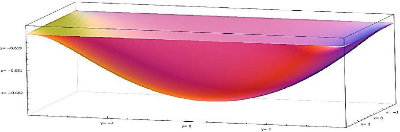
Figure 1.7 : Courbe de simulation de la composante åzz
du tenseur des déformations
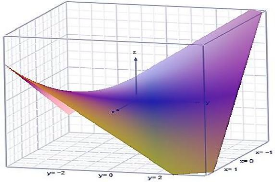
Figure 1.8 : Courbe de simulation de la composante åxy
du tenseur des déformations
26 /176
( )
Chapitre 1
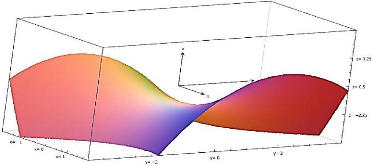
Figure 1.9 : Courbe de simulation de la composante åyz
du tenseur des déformations
(y2 --16)
27 /176
Figure 1.10: Courbe de simulation de la composante åzx
du tenseur des déformations
28 /176
Chapitre 2
Chapitre 2 : Méthode des Eléments
finis
Sommaire
2.1. Processus d'analyse par la méthode des
éléments finis 29
2.2. Discrétisation géométrique
(maillage) 32
2.3. Approximation nodale 39
2.4. Approximation par éléments finis
41
2.5. Définition de la géométrie
des éléments 43
2.6. Approximation sur un élément de
référence 49
2.7. Construction des fonctions d'interpolations et de
transformations
géométriques 53
2.8. Matrice élémentaire 59
2.9. Assemblage et conditions aux limites
60
29 /176
Chapitre 2
2.1. Processus d'analyse par la méthode des
éléments finis
2.1.1. Analyse des problèmes physiques
modélisés par une équation
Un certain nombre de problèmes physiques sont
décrits par des équations aux dérivées partielles
(EDP) sur un domaine spatial, un volume.
Il s'agit d'une généralisation des équations
différentielles aux fonctions de plusieurs variables. Par exemple, si
l'on a une fonction de trois
variables f(xi, x2, x3), l'équation suivante
:
Notons que
· la fonction É peut être une fonction
vectorielle ;
· l'équation fait souvent intervenir des
dérivées secondes
32É/3x2 i ou
32É/3xixj (voire d'ordres plus élevés)
;
· les coefficients ai et A ne sont pas
nécessairement des constantes, mais peuvent être des fonctions.
La résolution exacte, analytique, de telles
équations devient vite impossible manuellement. Par contre, si l'on
découpe le domaine spatial en petites cellules, appelées «
éléments finis » (EF), on peut
résoudre simplement l'EDP sur chaque élément.
La méthode des éléments finis
(MEF) consiste donc à [24]:
· découper le modèle spatial
en éléments finis : c'est le maillage ;
· écrire une version simplifiée
de l'EDP sur chaque élément fini (notons que les
conditions limites d'un élément ne sont pas connues, on ne
connaît que les conditions globales) ;
· rassembler les expressions des EDP
locales pour appliquer les conditions aux limites du problème.
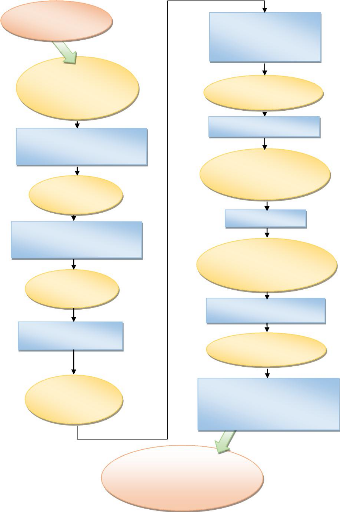
On retrouve dans l'organigramme suivant la démarche
générale de la méthode des éléments finis
(MEF).
30 /176
Chapitre 2
Formulation intégrale Méthodes des résidus
pondérés
Problème d'ingénierie
Hypothèse de
GALERKIN Ö=äu
Formules de Green
(Intégration par partie)
Equations aux dérivées partielles
Conditions aux limites
Formulation intégrale faible
Formulation
intégrale faible
avec
Formulation intégrale forte
Champs de
déplacements
Déformations
Interpolation
Déplacement-Déformations Loi de HOOKE
Vecteurs de localisation
Transformation du système de résolution
Matrice de rigidité et
vecteur force
globaux.
Système [??][????) = [F)
Maillage
Elément de référence Interpolation
Matrice de rigidité et
vecteur force
locaux
expansés
Matrice de rigidité et vecteur force
Déplacements et
réactions aux noeuds
Assemblage
Figure 2.1 : Organigramme descriptif de la démarche de
résolution MEF
Chapitre 2
2.1.2. Principe des éléments finis en calcul
des structures
Partant des hypothèses de petits déplacements et
petites déformations, la mécanique des solides déformable
a permis d'établir deux types d'équations régissant
l'équilibre d'un corps : les équations d'équilibre des
forces et la compatibilité des déplacements.
L'intégration de ces équations n'étant
pas aisée, l'une des méthodes les plus utilisées pour les
résoudre est celle dite des éléments finis
qui revient à remplacer le système continu
par un système discret.
Le solide est alors divisé en un certain nombre de
sous-domaines dont l'assemblage permet la
reconstitution de la géométrie initiale.
Le processus de division du solide en un ensemble de
sous-domaine s'appelle le maillage, on parle également
de discrétisation géométrique du
solide.
Chacun de ces sous-domaines porte le nom
d'éléments et ces éléments
sont dits finis parce qu'ils sont de forme
et de dimension connue. Ils sont reliés entre
eux par des noeuds dont les degrés de
liberté (DDL) constituent les inconnues du problème.
31 /176
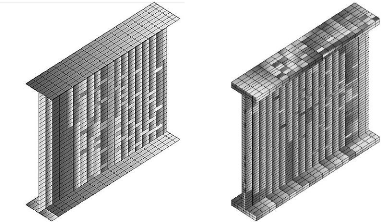
Figure 2.2 : (a) - Solide (Poutre en I) ; (b) Modèle
éléments finis
Considérant un champ de déplacement
cinématiquement admissible sur l'élément, la
méthode consiste le plus souvent à approximer
celui-ci au moyen d'une fonction polynomiale formée d'un nombre
fini de paramètres et à l'exprimer en fonction des
déplacements nodaux (les
32 /176
Chapitre 2
déplacements associés aux degrés de
liberté), on aboutit à une approximation nodale
du champ de déplacement.
Les principales étapes de construction d'un
modèle éléments finis sont les suivantes [24]:
y' Discrétisation du milieu continu en
sous-domaines (maillage) ;
y' Construction de l'approximation nodale par
sous-
domaine (approximation par éléments
finis) ; y' Calcul des matrices élémentaires
correspondant à la forme
intégrale du problème ;
y' Assemblage des matrices
élémentaires - Prise en compte des conditions aux limites
;
y' Résolution du système
d'équations.
La résolution du problème nécessite alors
une profonde maitrise :
y' des règles de maillage ;
y' du principe de construction de l'approximation nodale ;
y' du processus de calcul des matrices élémentaires
;
y' et de la notion d'assemblage.
Nous expliciterons chacune de ses étapes dans la suite.
2.2. Discrétisation géométrique
(maillage) 2.2.1. Définition du maillage
Un maillage est la discrétisation
spatiale d'un milieu continu, ou aussi, une modélisation
géométrique d'un domaine par des éléments
proportionnés finis et bien définis. L'objet d'un maillage est de
procéder à une simplification d'un
système par un modèle représentant ce système et,
éventuellement, son environnement (le milieu), dans l'optique de
simulations de calculs ou de représentations graphiques.
On parle également dans le langage commun de
pavage du domaine. Un maillage est défini par [19] :
y' son repère ;
Chapitre 2
? les points (noeuds) le constituant,
caractérisés par leurs coordonnées ;
? les cellules (éléments finis)
reliant n de ces points ;
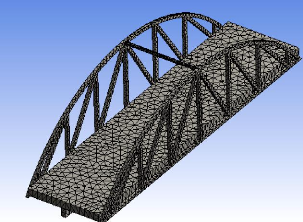
Figure 2.3 : Maillage d'un pont de type Bow-string en vue d'une
simulation
2.2.2. Caractérisation d'un maillage
Un maillage se caractérise par [19] :
- sa dimension : typiquement 1D, 2D ou 3D ;
33 /176
Figure 2.4 : (a) maillage en 2D (poutre I) ; (b) maillage en 3D
(poutre I)
34 /176
Chapitre 2
- son volume (dimension totale couverte) ;
?
: Volume de l'élément fini i
Nombre d'éléments dans le maillage
- sa finesse : surface ou volume moyen des cellules composant le
maillage ;
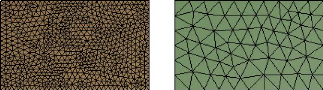
Figure 2.5 : (a) maillage raffiné (plaque) ; (b)
maillage grossier (plaque)
- la géométrie des cellules : en 1D segments ; en
2D triangles,
polygones, carrés ; en 3D polyèdres,
parallélépipèdes, cubes.

Figure 2.6 : Formes géométriques 1D
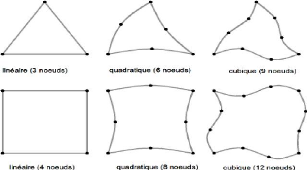
35 /176
Chapitre 2
Figure 2.7 : Formes géométriques 2D
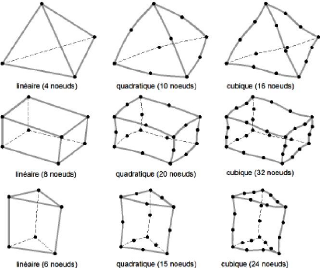
Figure 2.8 : Formes géométriques 3D
2.2.3. But et rôle du maillage
Le but principal d'un maillage d'éléments finis
est de rapprocher adéquatement la géométrie issue de la
modélisation, de la géométrie de l'objet réel.
L'étape du maillage est d'une importance capitale et la
qualité de la solution du problème étudié y est
étroitement liée.
Premièrement, la qualité d'une
solution dépend de la forme des éléments finis
utilisés pour mailler le domaine. Les meilleurs résultats de la
modélisation par éléments finis sont atteints si les
éléments (par exemple : tétraèdres et triangles)
formant le modèle maillé sont proches de ceux qui sont
équilatéraux [19].
Deuxièmement, outre les formes des
éléments finis, la qualité de la solution est directement
affectée par le degré de discrétisation du modèle
géométrique original, la « densité » du maillage
d'éléments finis [19].
Chapitre 2
Dans les logiciels éléments finis, l'utilisateur
peut contrôler ce paramètre du générateur de
maillage en spécifiant une taille moyenne relative ou absolue des
éléments finis se rapprochant de la géométrie du
corps, ou par les paramètres qui influencent la génération
du maillage. Habituellement, une division plus fine donne de meilleurs
résultats en termes de précision. Néanmoins, on doit
garder à l'esprit qu'en faisant usage d'un grand nombre
d'éléments de très petite taille, on augmente la taille du
système d'équation à résoudre, ce qui ralentit la
vitesse de calcul.
2.2.4. Règles de partition du domaine en
éléments
La partition du domaine V en éléments
Ve doit respecter les deux règles
suivantes:
? Deux éléments distincts ne peuvent avoir en
commun que des points situés sur leur frontière commune, si elle
existe. Cette condition exclut le recouvrement de deux éléments.
Les frontières entre éléments peuvent être
des points, des courbes ou des surfaces [5]:
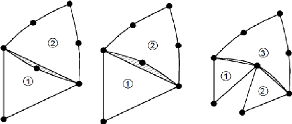
36 /176
Figure 2.9 : Connexions inadéquates entre
éléments
37 /176
Chapitre 2
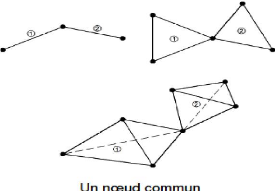
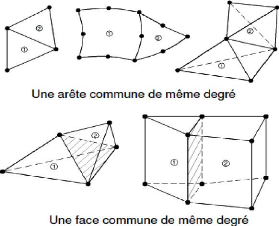
Figure 2.10 : Connexions adéquates entre
éléments
? L'ensemble de tous les éléments
Ve doit constituer un domaine aussi proche que possible du
domaine donné V, nous excluons en particulier les
« trous » entre éléments
[5]:
38 /176
Chapitre 2
1
2
Trou inadmissible entre éléments
Figure 2.11 : Exemple de maillage à exclure
Lorsque la frontière du domaine V est
constituée par des courbes ou des surfaces plus complexes que celles qui
définissent les frontières des éléments, une erreur
est inévitable. Cette erreur est appelée
erreur de discrétisation géométrique,
elle peut être réduite en diminuant la taille des
éléments, ou en utilisant des éléments à
frontières plus complexes :

Erreur
de
discrétisation
géométrique
Augmentation du
nombre
d'éléments
Utilisation d'éléments à frontières
courbées
Figure 2.12 : Discrétisation géométrique
des frontières courbes
Les deux règles précédentes sont
respectées si les éléments sont construits de la
manière suivante :
- Chaque élément est défini de
manière unique à partir des coordonnées des noeuds
géométriques situés sur cet élément. Le plus
souvent ces noeuds géométriques sont situés sur les
frontières de l'élément et sont communs à plusieurs
éléments ;
- La frontière d'un élément à deux
ou trois dimensions est formée par un ensemble de courbes ou de
surfaces. Chaque portion de
Chapitre 2
frontière doit être définie de
manière unique à partir des coordonnées des seuls noeuds
géométriques situés sur cette portion de frontière.
Ainsi les portions de frontière communes à deux
éléments sont définies de manière identique pour
l'un ou l'autre élément.
2.3. Approximation nodale
Un modèle mathématique d'un système physique
fait intervenir plusieurs
variables ou fonctions dites exactes ( ) :
températures, vitesses,
épaisseurs,
déplacements, etc.
Celles-ci sont représentées par des fonctions
« approchées» ( ) telles que la différence :
( ) ( )
soit assez « petite» pour l'objectif
visé.
La fonction approchée u est le plus souvent
linéaire en ái :
( ) ( ) ( ) ( )
( ) < ( ) ( ) ( )> { }
où : P1,P2,...,Pn sont des fonctions
connues linéairement
indépendantes (chaque fonction ne peut
pas être construite par combinaison linéaire des autres
fonctions), telles que des polynômes ou des fonctions
trigonométriques, ces fonctions sont indépendantes des
ái
á1, á 2, ..., á n
sont les paramètres de l'approximation.
39 /176
Les paramètres á1, á 2,
..., á n n'ont pas en général de sens
physique.
40 /176
Chapitre 2
Cependant nous pouvons choisir comme paramètres
á, les valeurs de la fonction ( ) en n
points appelés noeuds de coordonnées
Imposons de plus que la fonction approchée coïncide
avec la fonction exacte ( ) en ces noeuds:
( ) ( )
( ) ( )
( ) ( )
La fonction approchée s'écrit alors:
( ) ( ) ( ) ( )
un
( ) < ( ) ( ) ( )> { }
ü La relation ci-dessus définit une
approximation nodale ;
ü Les paramètres ái, sont les
paramètres généraux de l'approximation
;
ü Les paramètres ui, sont les
paramètres nodaux ou variables nodales
de l'approximation ;
ü Les fonctions N(x) sont les fonctions
d'interpolation.
L'approximation nodale possède les deux
propriétés suivantes :
Comme ( ) les fonctions Ni vérifient
( ) {
L'erreur d'approximation définie par:
41 /176
Chapitre 2
( ) ( )
s'annule en tous les noeuds xi :
La méthode d'approximation nodale d'une fonction d'une
variable u(x) s'étend directement à l'approximation
d'une fonction de plusieurs variables; par exemple dans le cas d'une fonction
de 3 variables:
( ) ( )
où :
x appartient à un domaine V,
La fonction approchée u(x) s'écrit sous
la forme :
( ) ( ) < ( ) ( ) ( )> { }
et doit vérifier la relation ( ) ( )
où i=1, 2, ..., n sont les
coordonnées des noeuds.
2.4. Approximation par éléments
finis
La construction d'une fonction approchée
u(x) est difficile lorsque
le nombre n de noeuds et donc de paramètres ui,
devient important. Le problème se complique encore
si le domaine V a une forme complexe et si la
fonction u(x) doit satisfaire des conditions
aux limites sur la frontière de V.
La méthode d'approximation nodale par
sous-domaines simplifie la reconstruction de
u(x) et s'adapte très bien au calcul
sur ordinateur
Elle consiste à [4] :
? identifier un ensemble de sous-domaines Ve
du domaine V;
42 /176
Chapitre 2
y' définir une fonction approchée
ue(x) différente sur
chaque sous-domaine Ve par la méthode
d'approximation nodale.
La méthode d'approximation par
éléments finis est une méthode particulière
d'approximation par sous-domaines qui présente les particularités
suivantes [4] :
y' L'approximation nodale sur chaque sous-domaine
Ve ne fait intervenir que les
variables nodales attachées à des noeuds situés sur
Ve et sur sa frontière ;
y' Les fonctions approchées
ue(x) sur chaque sous-domaine
Ve sont construites de manière à être
continues sur Ve et elles satisfont des conditions de
continuité entre les différents sous-domaines.
2.4.1. Définitions
y' Les sous-domaines Ve sont appelés
des éléments ;
y' Les points en lesquels la fonction approchée
ue(x) coïncide avec la fonction exacte
uex(x) sont les noeuds d'interpolation ou
points nodaux ;
y' Les coordonnées x, de ces noeuds sont les
coordonnées nodales ;
y' Les valeurs ui = ue(xi) =
uex(xi) sont les variables nodales.
L'approximation par éléments finis présente
deux aspects distincts :
- Il faut tout d'abord définir analytiquement la
géométrie de tous les éléments, ce qui est plus ou
moins compliqué selon leurs formes ;
- Il faut ensuite construire les fonctions d'interpolation
Ni(x) correspondant à chaque élément.
Chapitre 2
Expression typique de u :
|
|
x appartient
à V
|
|
Approximation
sur le
domaine
|
|
|
|
|
|
|
|
|
|
|
|
Partition en sous-
domaine Ve
x appartient à Ve
Approximation
par sous-
domaines
u( ) < ( )>*á+
Approximation
non nodale
u( ) <N( )>*????+
Approximation
nodale
????( ) <??e( )>*á+
????( ) <????( )>*????+
Approximation
générale
par
sous-domaines
(non nodale
et/ou nodale)
????( ) <????( )>*??????+
Approximation
par éléments
finis
43 /176
Figure 2.13 : Méthodes d'approximation
2.5. Définition de la géométrie
des éléments 2.5.1. Eléments de
référence
De manière à simplifier la définition
analytique des éléments de forme complexe, nous utiliserons la
notion d'élément de référence: un
élément
de référence yr est un
élément de forme très simple, repéré dans
un
espace de référence, qui peut être
transformé en chaque élément réel Ve par
une transformation géométrique [4]. Par exemple dans le cas d'un
triangle:
Chapitre 2
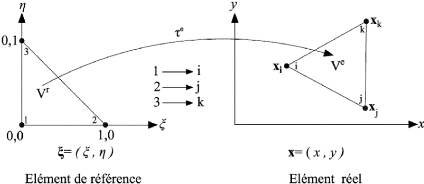
Figure 2.14 : Transformation d'un élément de
référence en élément réel
Afin d'alléger les notations, les
écritures x et seront respectivement
adoptés en lieu et place des notations
classiques (x,y) pour les coordonnées des noeuds dans
l'espace réel et (î,ç) dans
l'espace de référence. La différence pourra se faire
aisément avec l'utilisation de la forme italique
pour les notations classiques.
La transformation ??e définit les coordonnées
x=(x,y) de chaque point de
l'élément réel à partir des
coordonnées =( ) du point correspondant de
l'élément de référence.
La transformation ??e dépend de la forme et de la
position de l'élément réel, donc des coordonnées
des noeuds géométriques qui le définissent. Il y a donc
une transformation ??e différente pour chaque élément
réel :
e e( )
où sont les coordonnées des
noeuds géométriques qui
appartiennent à l'élément e.
44 /176
Elément 1 ( )
45 /176
Chapitre 2
Elément 2 T2: k
x2=x2(,
x1, x5, x3 )
Elément 3 T3: k
x3=x3(,
x5, x4, x3 )
Chaque transformation Te est choisie de manière
à présenter les propriétés suivantes :
ü Elle est bijective en tout point k situé
sur l'élément de référence ou
sur sa frontière : à tout point
Vr correspond donc un point de Ve et un seul, et
inversement ;
ü Les noeuds géométriques de
l'élément de référence correspondent
aux noeuds géométriques de
l'élément réel ;
ü Chaque portion de frontière de
l'élément de référence, définie par
les noeuds géométriques de cette
frontière, correspond à la portion de frontière de
l'élément réel définie par les noeuds
correspondants.
Soulignons qu'un même élément de
référence Vr (par exemple un
triangle à 3 noeuds) se transforme en tous les
éléments réels Ve de même
type (triangles à 3 noeuds) par des transformations Te
différentes :
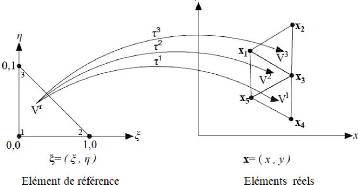
Figure 2.15 : Transformation d'un même
élément de référence en tous les
éléments
réels
Pour simplifier la notation, l'indice supérieur
e, caractéristique d'un
élément, sera supprimé, nous utiliserons une
transformation r linéaire
46 /176
Chapitre 2
par rapport aux coordonnées des noeuds
géométriques de l'élément réel
Vr.
( ) , ( )-* +
De plus les fonctions de transformation sont choisies
identiques pour les trois coordonnées :
( ) < ( )>* +
( ) < ( ) >* +
( ) < ( ) >* +
Par exemple pour un triangle à 3 noeuds xi, xj, xk
:
( ) ( ) ( ) ( ) < ( )> {
( ) ( ) ( ) ( ) < ( )>{
<N > < ( ) ( ) ( )>
Où ( ) appartient à Vr
Les fonctions , sont habituellement des polynômes en
appelées
fonctions de transformation
géométrique.
Elles sont construites de la même manière que les
fonctions d'interpolation N( ).
Grâce à la transformation géométrique
?? nous remplaçons la définition analytique de chaque
élément Ve dans l'espace des x par la
définition analytique, plus simple, de son élément de
référence Vr dans l'espace
Chapitre 2
des . Par la suite nous travaillerons systématiquement
dans l'espace des .
2.5.2. Formes d'éléments de
référence classiques
Nous présentons ci-dessous la forme et la
définition analytique des éléments de
référence correspondant aux éléments classiques [4]
:
Elément de référence à une
dimension :

47 /176
Figure 2.16 : Exemple d'éléments de
référence à une dimension
Elément de référence à deux
dimensions :
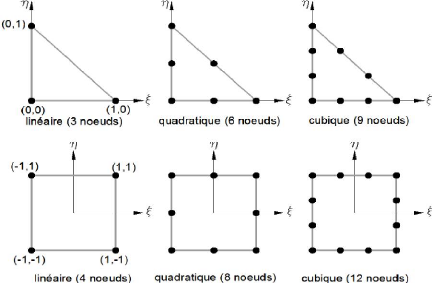
Figure 2.17 : Exemple d'éléments de
référence à deux dimensions
48 /176
Chapitre 2
Elément de référence à trois
dimensions :

Figure 2.18 : Exemple d'éléments de
référence à trois dimensions
- Dans les éléments de référence
quadratiques, les noeuds situés sur les côtés sont aux
milieux ( ) de ceux-ci. Dans les éléments
cubiques, ils sont situés au tiers (1/3) et aux
deux tiers (2/3) des côtés ;
- Les fonctions de transformation géométrique (
) n'ont pas été données explicitement pour les
éléments de référence ci-dessus. En effet la
construction de ces fonctions est identique à celle des
49 /176
Chapitre 2
fonctions d'interpolation N( ) qui sera
détaillée dans les lignes à suivre.
2.6. Approximation sur un élément de
référence
2.6.1. Expression de la fonction approchée ( )
Nous choisissons sur le domaine V un ensemble de n
noeuds
d'interpolation de coordonnées xi
confondues ou non avec les noeuds
géométriques.
Sur chaque élément Ve nous utilisons une
approximation nodale de la
fonction exacte ( ).
( ) ( ) < ( ) ( ) ( ) > { < ( )>* +
où : x appartient à
Ve,
sont les valeurs de aux e
noeuds d'interpolation de
l'élément, ou variables
nodales,
( ) sont les fonctions d'interpolation sur
l'élément réel.
e ( ) ( ) < ( )>* +
Avec :
( ) , ( )-* +
où : * + sont les variables
nodales de l'élément ;
( ) sont les fonctions d'interpolation sur
l'élément de référence. Remarque :
? En général les fonctions
N(x) ne sont utilisées que pour des
éléments simples. Elles sont le plus souvent remplacées
par les fonctions N( ) où x et sont
liés par la transformation ?? ;
Chapitre 2
? Les mêmes fonctions N( )
peuvent être utilisées pour tous les éléments
possédant le même élément de référence
caractérisé par
:
· sa forme ;
· ses noeuds
géométriques;
· ses noeuds d'interpolation.
2.6.2. Propriétés de la fonction
approchée ( )
2.6.2.1. Propriété fondamentale de
l'approximation nodale
La fonction approchée ( ) coïncide avec la fonction
exacte ( ) en
tous Les noeuds d'interpolation de
l'élément, de coordonnées xi
:
( ) ( ) < ( ) ( ) > {
}
De même, en utilisant l'approximation sur
l'élément de référence
D'où:
Une
( ) ( ) < ( ) ( ) > { }
D'où :
50 /176
( ) {
51 /176
Chapitre 2
Continuité sur l'élément
Si nous désirons obtenir une fonction approchée
(x) continue sur l'élément, ainsi que ses
dérivées jusqu'à l'ordre s, nous devons utiliser
des fonctions ( ) continues et à dérivées continues
jusqu'à l'ordre s.
Continuité entre
éléments
Si nous désirons que (x) et ses
dérivées jusqu'à l'ordre soient
continues sur une frontière commune à deux
éléments, il faut que (x)
et ses dérivées jusqu'à l'ordre s
dépendent de manière unique des seules variables nodales
associées aux noeuds de cette frontière. Considérons
d'abord la continuité de (x) sur une frontière
(continuité
) :
( ) < ( ) ( ) > { }
Les produits ( ) , doivent être nuls si ,
n'est pas une variable
nodale associée à un noeud de cette
frontière.
D'où :
( ) ,
Lorsque x est situé sur une
frontière et , n'est pas une variable nodale de cette
frontière.
De même sur l'élément de
référence :
( ) ,
Lorsque est situé sur une frontière et ,
n'est pas une variable nodale de cette frontière.
u( )
La condition pour que soit continue sur une frontière
s'écrit de
manière similaire :
52 /176
Chapitre 2
u
u( ) ( ) ( ) u
< }
> {
u
où :
( )
Lorsque x est situé sur une
frontière et , n'est pas une variable nodale de cette
frontière.
La condition précédente s'écrit sur
l'élément de référence, à deux
dimensions:
( ) ( )
La notion de continuité sur les frontières entre
les éléments est une notion clé de la
méthode des éléments finis. Elle est
liée à la notion d'élément conforme ou non
conforme. Le type de continuité qu'il faut assurer dépend du
problème traité.
Si la fonction ( ) est seule continue sur les
frontières entre les
éléments, l'approximation est de type (ou
classe ). Si ( ) et ses
dérivées premières sont continues,
l'approximation est de type . Si
( ) et ses dérivées
jusqu'à l'ordre n sont continues, l'approximation est de
type .
Un élément est dit isoparamétrique
si les fonctions de transformation
géométrique N ( ) sont identiques aux
fonctions d'interpolation N ( ). Ceci implique que les noeuds
géométriques soient confondus avec les noeuds
d'interpolation.
53 /176
Chapitre 2
Nous dirons qu'un élément est
pseudo-isoparamétrique si ses fonctions N ( )
et N ( ) sont des polynômes différents utilisant les
mêmes monômes.
Si l'ordre des polynômes N ( ) est
inférieur à l'ordre des polynômes
N ( ), l'élément est
sub-paramétrique. Il est
super-paramétrique dans le cas contraire.
Le nombre de variables nodales ; associées
à l'ensemble des noeuds d'interpolation de l'élément est
appelé nombre de degrés de liberté de
l'élément et noté .
2.7. Construction des fonctions d'interpolations et de
transformations géométriques
2.7.1. Construction des fonctions N ( ) et Ni( )
Les fonctions de transformation géométrique N
( ) et les fonctions
d'interpolation sur l'élément de
référence Ni( ) ont les mêmes
propriétés.
Ceux-ci sont souvent des polynômes classiques de type
Lagrange ou Hermite; cependant il n'existe
pas de technique manuelle systématique pour les construire.
Nous proposerons dans les paragraphes suivants une
méthode numérique générale valable pour tous les
types d'éléments.
2.7.1.1. Méthode générale de
construction
Choix de la base polynomiale :
Exprimons ( ) sur l'élément de
référence sous la forme d'une
combinaison linéaire de fonctions connues
indépendantes P1( ), P2( ), ..., qui sont le
plus souvent des monômes indépendants. Le choix des fonctions
Pi( ) est l'une des opérations de base de la méthode des
éléments finis:
Nombre de dimensions
Bases complètes
1
1
Degré du polynôme r
2
1
Base polynomiale < >
<1 î> (linéaire)
<1 î î2> (quadratique)
2
3
54 /176
Chapitre 2
( ) < ( ) ( ) ( )> { } < ( )>* +
L'ensemble des fonctions ( ) constitue la base
polynomiale de l'approximation, son nombre de termes doit être
égal au nombre de
variables nodales ou nombre de degrés de liberté de
l'élément. Nous
utilisons le plus souvent une base polynomiale
complète; ceci n'est
possible que pour certaines valeurs de , Le tableau
suivant précise le
nombre de monômes nécessaires pour
construire des polynômes complets.
|
Degré du polynôme r
|
1 dimension
|
2 dimensions
|
3 dimensions
|
|
|
|
|
1
|
2
|
3
|
4
|
|
2
|
3
|
6
|
10
|
|
3
|
4
|
10
|
20
|
|
4
|
5
|
15
|
35
|
|
5
|
6
|
21
|
56
|
Tableau 2.1 : Nombre de monômes nécessaire pour
construire des polynômes
complets
Bases polynomiales complètes et
incomplètes
55 /176
Chapitre 2
|
2
2
|
1
2
|
<1 î q> (linéaire)
<1 î q î2 îq q2 >
(quadratique)
|
3
6
|
|
3
3
|
1
2
|
<1 î q æ > (linéaire)
<1 î q æ î2 îq
q2 qæ æ2 îæ >
(quadratique)
|
4
10
|
|
Bases non complètes
|
|
2
3
|
2
3
|
<1 î q îq > (bi-linéaire)
<1 î q æ îq qæ îæ
îqæ >
(tri-linéaire)
|
4
8
|
Tableau 2.2 : Bases polynomiales complètes et
incomplètes
Pour construire les fonctions de transformation
géométrique ,
choisissons de la même manière des expressions de
x de la forme :
|
(
|
)
|
<
|
(
|
)>*
|
+
|
|
(
|
)
|
<
|
(
|
)>{
|
}
|
|
(
|
)
|
<
|
(
|
)>*
|
+
|
56 /176
Chapitre 2
Le nombre de fonctions ( ) et de coefficients * +, {
} et * + est égal au nombre de noeuds
géométriques de l'élément.
Définitions :
ü Les coefficients * + sont appelés
variables généralisées de l'élément
par opposition aux variables nodales *u
+ ;
ü La relation ( ) < ( )>* + définit
l'approximation généralisée
par opposition à l'approximation nodale ( ) < (
)>*u + ;
ü les coefficients * +, { } et * + sont
appelés parfois coordonnées
généralisées de l'élément par
opposition aux coordonnées nodales * +,
* +, * + des noeuds
géométriques.
Relations entre variables
généralisées et variables nodales :
Exprimons qu'en chaque noeud d'interpolation de
coordonnées * +, la
fonction u( ) prend la valeur nodale ( ) :
|
|
<
|
(
|
|
)
|
|
|
(
|
)
|
|
|
|
(
|
)>
|
|
|
U 2
} * +
{
|
|
<
|
(
|
|
)
|
|
|
(
|
)
|
|
|
|
(
|
)>
|
*
|
+
|
|
|
<
|
(
|
|
|
)
|
|
|
(
|
)
|
|
|
(
|
)>
|
|
|
En posant :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
<
|
(
|
)
|
|
|
(
|
|
)
|
|
|
|
(
|
)>
|
|
|
|
, -
|
<
|
(
|
)
|
|
|
(
|
|
)
|
|
|
|
(
|
)>
|
|
|
|
|
<
|
(
|
|
)
|
|
|
(
|
|
)
|
|
(
|
|
)>
|
|
|
|
|
Chapitre 2
nous pouvons écrire :
* + , -* +
Soit en inversant la matrice nodale , -
d'ordre
* + , - *u +
Pour passer de *u + , -* + à la relation * + , -
*u + il ne faut
pas que , - soit singulière. Ceci dépend du choix
de la base polynomiale et des coordonnées * + des noeuds de
l'élément de référence. Puisque , - est
indépendante de la géométrie de l'élément
réel, la propriété de singularité de
, - est une caractéristique de l'élément de
référence et non de l'élément réel.
De la même manière, nous écrivons
les relations aux noeuds géométriques:
*
|
+
|
,
|
-*
|
+
|
*
|
+
|
,
|
-{
|
}
|
*
|
+
|
,
|
-*
|
+
|
|
Soit après inversion de , -
*
|
+
|
,
|
- *
|
+
|
{
|
}
|
,
|
- *
|
+
|
*
|
+
|
,
|
- *
|
+
|
|
57 /176
? Expression des fonctions Net N
:
58 /176
Chapitre 2
Reportons * + , - *u + dans
( ) < ( ) ( ) ( )> { } < ( )>* +
Nous avons :
( ) < ( )>, - * +
Soit :
( ) , ( )-* +
D'où :
( ) < ( )>, -
Nous obtenons de la même manière dans le cas des
fonctions N :
( ) < ( )>* +
( ) < ( )>* +
( ) < ( )>* +
Où :
< ( )> < ( )>, -
? Dérivation de la fonction ( ) :
Les fonctions dérivées s'obtiennent comme
suit :
< > < >
{ < >
< >
} , - *u +
*u + [ ]*u +
[ < >] [ < >]
Résumé des opérations de
construction de <N>
59 /176
Chapitre 2
ü Choix de la base polynomiale < ( )>
|
;
|
|
ü Evaluation de la matrice nodale , - [ ( )] ;
ü Inversion de la matrice nodale , - ;
ü Calcul de <N> aux points
désirés :
( ) < ( )>, -
Il est important de noter que ces opérations ne doivent
être effectuées qu'une seule fois pour l'ensemble des
éléments réels qui possèdent le même
élément de référence.
2.8. Matrice élémentaire
2.8.1. Matrice de rigidité
élémentaire
Pour un élément de domaine , la matrice de
rigidité élémentaire vaut :
?, - , -, -
, - représente la matrice des fonctions de
déformation ; , - représente la matrice des constantes
d'élasticité.
2.8.2. Matrice des forces équivalentes de volume
Pour un élément, la matrice des forces
équivalentes de volume se détermine par la formule ci-dessous:
* + ?, - * +
, - représente la matrice des fonctions
d'interpolations * + représente le vecteur des forces
volumiques.
2.8.3. Matrice des forces équivalentes de
surface
Le calcul est conduit de la même manière que pour
la matrice des forces équivalentes de volume , les forces nodales
équivalentes aux forces de surface sont :
Chapitre 2
* + ?, - * +
* + représente le vecteur des forces surfaciques.
2.9. Assemblage et conditions aux limites 2.9.1.
Définition de l'assemblage
L'assemblage est l'opération qui consiste à
construire la matrice globale , - et le vecteur global des sollicitations * +
à partir des matrices élémentaires , - et des vecteurs
élémentaires des sollicitations * +.
2.9.2. Les règles et étapes de
l'assemblage
Les règles d'assemblage sont définies par la
relation :
?
les matrices élémentaires étant initialement
exprimées dans le repère local propre à chaque
élément, on les exprime dans le repère global avant de
procéder à leur sommation étendue au domaine
maillé.
La procédure qui consiste à exprimer une matrice
élémentaire en repère global s'appelle l'expansion
de matrice
Ainsi donc nous avons :
, - ?, -
* + ? * +
avec * +=* + * +
, -, * +, * + sont les matrices et vecteurs
élémentaires expansés.
60 /176
L'assemblage se déroule donc principalement en deux
étapes :
61 /176
Chapitre 2
? construction des matrices étendues par expansion des
matrices et vecteurs élémentaires [
ke], tf }, tf }
;
? addition des matrices et des vecteurs
étendus.
62 /176
Chapitre 3
Chapitre 3 : Etude de quelques
exemples d'éléments finis
Sommaire
3.1. Elément fini linéaire à deux
noeuds 63
3.2. Elément fini triangulaire plan à trois
noeuds 64
3.3. Elément fini tétraédrique
à quatre noeuds 66
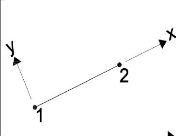
Chapitre 3
3.1. Elément fini linéaire à
deux noeuds 3.1.1. Définition
Il s'agit d'un élément de type poutre pour le
calcul des réseaux de poutre chargés.
Figure 3.1 : Elément de Poutre plan.
Soit E, A, I, L ses caractéristiques mécaniques et
géométriques. 3.1.2. Matrice de rigidité
élémentaire
3.1.2.1. Poutre en flexion simple
Pour une poutre qui travaille en flexion simple,
l'élément fini utilisé possède deux degrés
de liberté par noeuds (1 degré de liberté en
déplacement, 1 degré de liberté en rotation), soit au
total quatre degrés de liberté.

63 /176
Figure 3.2 : Elément fini de poutre avec deux
degrés de liberté par noeuds.
Chapitre 3
La matrice de rigidité élémentaire
utilisée dans les calculs est :
|
12
|
6L
|
--12
|
6L
|
|
El 6L
|
4L2
|
--6L
|
2L2
|
|
[K ] = L3 --12
|
--6L
|
12
|
--6L
|
|
6L
|
2L2
|
--6L
|
4L2
|
3.1.2.2. Poutre en flexion composée
Cet élément possède trois degrés
de liberté par noeuds (2 degrés de
liberté en déplacement et 1 degré de liberté en
rotation), soit au total six degrés de liberté.
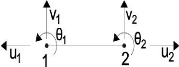
Figure 3.3 : Elément fini de poutre avec trois
degrés de liberté par noeuds.
La matrice de rigidité élémentaire
utilisée dans les calculs est :
64 /176
--
L2 L L2 L
3.2. Elément fini triangulaire plan à
trois noeuds 3.2.1. Définition
Il s'agit d'un élément à trois
noeuds, utilisés pour les problèmes de contrainte plane, de
déformations planes ou d'axisymétrie.
65 /176
Chapitre 3
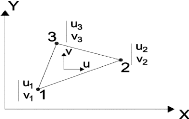
Figure 3.4 : Elément triangulaire plan à
trois noeuds.
3.2.2. Matrice de rigidité
élémentaire
Cet élément possède deux degrés de
liberté en déplacement par noeuds.
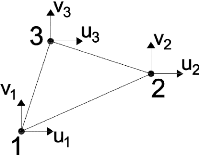
Figure 3.5 : Elément triangulaire plan avec deux
degrés de liberté par noeuds.
La matrice de rigidité élémentaire
utilisée dans les calculs est :
eE
[K l 4A( 1 -- v2)
Sym
x11 + Cyiz
Avec :
66 /176
Chapitre 3
3.3. Elément fini tétraédrique
à quatre noeuds 3.3.1. Définition
Le tétraèdre à champ
linéaire est l'élément tridimensionnel le plus
simple, son élément de référence se présente
comme suit :
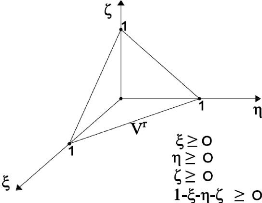
Figure 3.6 : Elément de référence de forme
tétraédrique.
Celui-ci est construit par extension du triangle
isoparamétrique à trois noeuds. Il possède trois
degrés de liberté en déplacement par noeud, ce
qui correspond à un total de douze degrés de
liberté (DDL).
3.3.2. Construction de la matrice des fonctions
d'interpolation
Choix de la base polynomiale (P())
La base polynomiale utilisée est celle-ci : (P())
= ( 1 f i 0 Evaluation de la matrice nodale [Pa]
Calcul de la matrice [Pa] :
[ ]
67 /176
Chapitre 3
|
, -
|
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
< >
< >
< >
< >
|
Le calcul de , - donne :
, -
[
]
Inversion de la matrice nodale , -
Le calcul de , - donne :
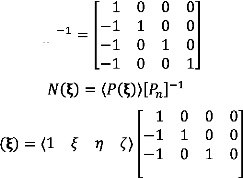
, -
( ) < ( )>, -]
( ) < > [
10 0
--1 1
--1 0 0
< ( )> < >
Chapitre 3
L'élément de référence
tétraédrique à 4 noeuds ayant 12 DDL, la matrice des
fonctions d'interpolation se présente comme suit :
, ( )-
[
]
Avec :
3.3.3. Calcul de la matrice jacobienne de la
transformation géométrique
< >
, - [< > ] [* + * + * + ]
< >
, - [ ] [
68 /176
, - [
69 /176
Chapitre 3
(J) = (x2 -- x1)(Y3 --
Y1)(z4 -- z1) + (Y2 --
Y1)(z3 -- z1)(x,,4-- x1)
+ (z2 -- z1)(x3 --
x1)(Y4 -- Y1) -- (x2 --
x1)(z3 -- z1)(y4-- Y1)
-- (Y2 -- Y1)(x3 --
x1)(z4 -- z1) -- (z2 --
z1)(Y3 -- Y1)(x4 --
x1)
det(J) = 6Ve
Ve représente le volume du tétraèdre
défini par l'élément dans l'espace
réel.
Champ de déplacement
Le champ de déplacement se calcule par la relation :
u(k) = [ N(k)]{un}
Champs de déformation
Il est défini par la relation { E} = [
B]{un}
La matrice [ B] est obtenue par application de
l'opérateur dérivée sur le champ de
déplacement, donc par la relation :
[ B] = [ D][ N( k)]
[ B (x)] = [[ B1(x)] [ B2 (x)] [
B3 (x)] [ B4(x)]]
o
aY ax
70 /176
Chapitre 3
, -
, - , - [
, - [ ]
Avec :
|
V représente le volume du
tétraèdre
|
|
|
|
|
|
(
|
)(
|
)
|
(
|
)(
|
)
|
|
(
|
)(
|
)
|
(
|
)(
|
)
|
|
(
|
)(
|
)
|
(
|
)(
|
)
|
|
(
|
)(
|
)
|
(
|
)(
|
)
|
|
(
|
)(
|
)
|
(
|
)(
|
)
|
|
(
|
)(
|
)
|
(
|
)(
|
)
|
|
(
|
)(
|
)
|
(
|
)(
|
)
|
|
(
|
)(
|
)
|
(
|
)(
|
)
|
|
(
|
)(
|
)
|
(
|
)(
|
)
|
Chapitre 3
[
71 /176
}{
Calcul de , ( )-On a :
{
}
, ( )-
Calcul de , ( )-
Chapitre 3
{
}
, ( )-
Calcul de , ( )-
72 /176
{
}
Chapitre 3
[B3 ( k)]
f f 0
Calcul de [B4(k)]
73 /176
aN4 {f33
aZ
[B4 ( k)]
f
23 f130
La matrice [ B] se présente comme suit :
[ B( k)] = [[ B1( k)] [B2(k)] [
B3 ( k)] [ B4 ( k)]]
Avec :
74 /176
Chapitre 3
f
, ( )-
f
|
,B
(0- V
|
f
f f
f f
f f
|
|
,B
(0- V
|
f
f
f
f f
f f
[ f f o
12
|
,B
(??)- V
|
f
f
f
f f
f f
[ f f
|
3.3.4. Construction de la matrice de rigidité
élémentaire
La matrice de rigidité élémentaire se
calcule grâce à la formule suivante :
, - ? , ( )- , -, ( )-
En ramenant l'intégral sur l'espace des
éléments de référence, on a :
, - ? e ( ) , ( )- , -, ( )- e ( )
Chapitre 3
,
- ?, ( )- , -, ( )-
e ( ) Comme la matrice des
fonctions de déformation, dans le cas
l'élément
finis tétraédrique à 4 noeuds,
est indépendante des coordonnées , on peut écrire
:
, - e ( ) ,
, - ,
|
(
|
)- ,
|
-, (
|
)-
|
|
(
|
)- ,
|
-, (
|
)-
|
75 /176
, - , ( )- , -, ( )-
76 /176
Termes de la matrice de
|
rigidité , -
|
Expression :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
((
|
|
(
)
|
|
|
|
)
|
(
|
)(
|
|
|
)
|
|
(
|
|
)(
|
|
|
)
|
)
|
|
|
|
|
((
|
|
)
|
(
|
|
|
)(
|
|
)
|
(
|
|
|
|
)(
|
|
|
))
|
|
|
|
|
|
|
((
|
|
)
|
(
|
|
|
)(
|
|
)
|
(
|
|
|
|
)(
|
|
|
))
|
|
|
|
|
(
|
(
|
|
)(
|
|
|
|
)
|
(
|
)(
|
|
|
|
)
|
|
(
|
|
) (
|
|
|
|
))
|
|
|
|
|
|
|
(
|
(
|
|
) (
|
|
)
|
|
(
|
|
|
|
))
|
|
|
|
|
|
|
|
|
|
|
|
(
|
(
|
|
) (
|
|
)
|
|
(
|
|
|
|
))
|
|
|
|
|
|
|
(
|
(
|
|
)(
|
|
|
|
)
|
(
|
)(
|
|
|
|
)
|
|
(
|
|
)(
|
|
|
|
))
|
|
|
|
|
|
|
(
|
(
|
|
) (
|
|
)
|
|
(
|
|
|
|
))
|
|
|
|
|
|
77 /176
|
|
|
|
(
|
(
|
|
) (
|
|
|
)
|
|
(
|
|
|
|
))
|
|
|
|
|
|
|
( (
|
|
)(
|
|
|
)
|
|
(
|
)(
|
|
|
|
)
|
|
(
|
|
)(
|
|
|
|
))
|
|
|
|
|
(
|
(
|
|
) (
|
|
|
)
|
|
(
|
|
|
|
))
|
|
|
|
|
|
|
|
|
|
(
|
(
|
|
) (
|
|
|
)
|
|
(
|
|
|
|
))
|
|
|
|
|
|
|
((
|
|
)(
|
|
|
)
|
(
|
|
)(
|
|
|
)
|
|
(
|
|
)(
|
|
|
)
|
)
|
|
|
|
((
|
)
|
(
|
|
|
)(
|
|
|
)
|
(
|
|
|
|
)(
|
|
|
))
|
|
|
|
|
|
|
|
(
|
(
|
|
) (
|
|
|
)
|
|
(
|
|
|
|
))
|
|
|
|
|
|
|
(
|
|
)(
|
|
|
)
|
|
(
|
)(
|
|
|
|
)
|
|
(
|
|
)(
|
|
|
|
)
|
|
|
|
|
|
(
|
|
) (
|
|
|
)
|
|
(
|
|
|
|
)
|
|
|
|
|
|
|
|
|
|
|
(
|
|
) (
|
|
|
)
|
|
(
|
|
|
|
)
|
|
|
|
|
|
78 /176
|
(
|
)
|
(
|
|
|
)
|
|
(
|
)(
|
|
|
)
|
|
(
|
|
) (
|
|
)
|
|
|
|
|
(
|
|
|
) (
|
|
|
)
|
(
|
|
|
|
)
|
|
|
|
|
|
|
|
(
|
|
|
) (
|
|
|
)
|
(
|
|
|
|
)
|
|
|
|
|
(
|
)
|
(
|
|
|
)
|
|
(
|
)(
|
|
|
)
|
|
(
|
|
) (
|
|
)
|
|
|
|
|
(
|
|
|
) (
|
|
|
)
|
(
|
|
|
|
)
|
|
|
|
|
(
|
)(
|
|
|
)
|
|
(
|
|
)(
|
|
)
|
|
(
|
|
)(
|
|
)
|
|
|
|
|
|
(
|
|
|
) (
|
|
|
)
|
(
|
|
|
|
)
|
|
|
|
|
|
|
|
(
|
|
|
) (
|
|
|
)
|
(
|
|
|
|
)
|
|
|
|
|
(
|
)
|
(
|
|
|
)
|
|
(
|
) (
|
|
|
)
|
|
(
|
|
)(
|
|
)
|
|
|
|
|
(
|
|
|
) (
|
|
|
)
|
(
|
|
|
|
)
|
|
|
|
79 /176
|
|
|
|
|
(
|
|
)
|
(
|
|
|
|
)
|
|
(
|
|
|
|
)
|
|
|
|
(
|
)
|
(
|
|
|
)
|
|
|
(
|
|
)
|
(
|
|
|
)
|
|
(
|
|
)(
|
)
|
|
|
|
|
|
(
|
|
)
|
(
|
|
|
|
)
|
|
(
|
|
|
|
)
|
|
|
|
|
|
|
|
(
|
|
)
|
(
|
|
|
|
)
|
|
(
|
|
|
|
)
|
|
|
|
(
|
)
|
(
|
|
|
)
|
|
|
(
|
|
)
|
(
|
|
|
)
|
|
(
|
|
)(
|
)
|
|
|
|
|
(
|
|
)
|
|
|
|
(
|
|
)
|
|
(
|
|
)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(
|
|
)
|
|
|
|
(
|
|
)
|
|
|
(
|
|
)
|
|
|
|
|
|
|
|
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
|
|
|
80 /176
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
|
(
|
|
)
|
|
(
|
|
)
|
|
(
|
)
|
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
(
|
|
)
|
|
(
|
|
)
|
|
(
|
)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
|
(
|
|
)
|
|
(
|
|
)
|
|
(
|
)
|
|
|
|
|
|
(
|
|
)
|
|
|
|
|
81 /176
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
|
(
|
|
)
|
|
(
|
|
)
|
|
(
|
)
|
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
(
|
|
)
|
|
(
|
|
)
|
|
(
|
)
|
|
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
|
(
|
|
)
|
|
(
|
|
)
|
|
(
|
)
|
82 /176
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
|
(
|
|
)
|
|
(
|
|
)
|
|
(
|
)
|
|
(
|
|
)
|
|
(
|
|
)
|
|
(
|
)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(
|
|
)
|
|
(
|
|
)
|
|
(
|
)
|
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
|
|
|
|
(
|
|
)
|
|
|
|
|
|
(
|
|
)
|
|
(
|
|
)
|
|
(
|
)
|
|
83 /176
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(
|
)
|
|
|
|
|
|
|
(
|
|
)
|
|
(
|
)
|
|
(
|
)
|
|
|
|
|
|
(
|
)
|
|
|
|
|
|
(
|
|
)
|
|
(
|
)
|
|
(
|
)
|
|
|
|
|
|
|
(
|
)
|
|
|
|
|
|
|
|
|
|
(
|
)
|
|
|
|
|
|
|
(
|
|
)
|
|
(
|
)
|
|
(
|
)
|
|
(
|
|
)
|
|
(
|
)
|
|
(
|
)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
84 /176
Tableau 3.1 : Tableau des valeurs de la matrice de
rigidité élémentaire de l'élément
tétraédrique à 4 noeuds (douze
degrés de
liberté).
85 /176
Chapitre 3
3.3.5. Programme (matrice_K) de Calcul de la matrice de
rigidité élémentaire pour un élément
tétraédrique à 4 noeuds
3.3.5.1. Structure du programme
? Données du problème (Input)
- Module de Young E ;
- Coefficient de Poisson y ;
- Coordonnées des noeuds de l'élément
réel (xi, yi, zi).
? Résultat (Output):
- Matrice de rigidité élémentaire Ke
3.3.5.2. Code source en FORTRAN
Program matrice_k
implicit none
integer, parameter :: n=3 ! dimension du tableau
real, dimension(1:3,1:12) ::B1,B2,B3,B4
real, dimension(1:3,1:3):: jacb_inv
integer :: i,j,lin,col,lin1,col1
real, dimension(1:12,1:12)::Ke
real, dimension(1:6,1:12)::B,res1,res2,res3,res4
real, dimension(1:12,1:6)::Bt,res5
real, dimension(1:6,1:3)::B_1,B_2,B_3,B_4
real, dimension(1:6,1:6)::H !!!!!!! matrice des constantes
d'élasticté
real::x_1,y_1,z_1,x_2,y_2,z_2,x_3,y_3,z_3,x_4,y_4,z_4,vol,det_jab,nu,E
real,dimension(1:3,1:4)::c_noeud
lin=6;col=12;;lin1=6;col1=6
!!! Entrer des donnees
26 write(*,*)"Entrer le module de young E et le coefficient de
POISSON v"
read(*,*,err=26)E,nu
!!!!!! Verification de la valeur de E et nu
if ((E.le.0).or.((nu.lt.0).or.(nu.gt.0.4999))) then
write(*,28)
write(*,*)" Veuillez entrer des valeurs convenables pour E et v
(E>0)
(0<v<0.5) "
write(*,28)
goto 26
endif
do j=1,4
27 write(*,24)"Entrer les coordonnees du noeud ",j 24
format(x,A,2x,I1)
read(*,*,err=27)c_noeud(1,j),c_noeud(2,j),c_noeud(3,j) enddo
write(*,28)
!!! Affectation des coordonnées
x_1=c_noeud(1,1);y_1=c_noeud(2,1);z_1=c_noeud(3,1)
x_2=c_noeud(1,2);y_2=c_noeud(2,2);z_2=c_noeud(3,2)
x_3=c_noeud(1,3);y_3=c_noeud(2,3);z_3=c_noeud(3,3)
x_4=c_noeud(1,4);y_4=c_noeud(2,4);z_4=c_noeud(3,4) !!!!!!! vérification
de la singularité de J if
((det_jab(x_1,y_1,z_1,x_2,y_2,z_2,x_3,y_3,z_3,x_4,y_4,z_4)).eq.0) then
write(*,*)" la matrice jacobienne de transformation est singuliere "
write(*,*)" cela peut etre du a une grande distorsion de l'element "
write(*,*)" Veuillez changer svp les coordonnees des noeuds"
write(*,28);28 format(/:)
86 /176
Chapitre 3
goto 27 endif
11111111111111111111111111
jacb_inv(1,1)=(y_3-y_1)*(z_4-z_1)-(z_3-z_1)*(y_4-y_1)
jacb_inv(1,2)=(z_2-z_1)*(y_4-y_1)-(z_4-z_1)*(y_2-y_1)
jacb_inv(1,3)=(y_2-y_1)*(z_3-z_1)-(y_3-y_1)*(z_2-z_1)
jacb_inv(2,1)=(z_3-z_1)*(x_4-x_1)-(z_4-z_1)*(x_3-x_1)
jacb_inv(2,2)=(x_2-x_1)*(z_4-z_1)-(x_4-x_1)*(z_2-z_1)
jacb_inv(2,3)=(z_2-z_1)*(x_3-x_1)-(x_2-x_1)*(z_3-z_1)
jacb_inv(3,1)=(x_3-x_1)*(y_4-y_1)-(y_3-y_1)*(x_4-x_1)
jacb_inv(3,2)=(y_2-y_1)*(x_4-x_1)-(x_2-x_1)*(y_4-y_1)
jacb_inv(3,3)=(x_2-x_1)*(y_3-y_1)-(y_2-y_1)*(x_3-x_1)
1111111111111111111111111111111
B_1=reshape((/-jacb_inv(1,1)-jacb_inv(1,2)-jacb_inv(1,3),0.,0.,0.,&
&-jacb_inv(2,1)-jacb_inv(2,2)-jacb_inv(2,3),0.,0.,0.,&
&-jacb_inv(3,1)-jacb_inv(3,2)-jacb_inv(3,3)&
&,0.,-jacb_inv(3,1)-jacb_inv(3,2)-jacb_inv(3,3),-jacb_inv(2,1)-jacb_inv(2,2)&
&-jacb_inv(2,3),-jacb_inv(3,1)-jacb_inv(3,2)-jacb_inv(3,3),0.,-jacb_inv(1,1)-&
&jacb_inv(1,2)-jacb_inv(1,3),-jacb_inv(2,1)-jacb_inv(2,2)-jacb_inv(2,3),&
&-jacb_inv(1,1)-jacb_inv(1,2)-jacb_inv(1,3),0./),(/6,3/),order=(/2,1/))
B_2=reshape((/jacb_inv(1,1),0.,0.,0.,jacb_inv(2,1),0.,0.,0.,jacb_inv(3,1),0
.,jacb_inv(3,1)&
&,jacb_inv(2,1),jacb_inv(3,1),0.,jacb_inv(1,1),jacb_inv(2,1),jacb_inv(1,1),
0./),(/6,3/),order=(/2,1/))
B_3=reshape((/jacb_inv(1,2),0.,0.,0.,jacb_inv(2,2),0.,0.,0.,jacb_inv(3,2),0
.,jacb_inv(3,2)&
&,jacb_inv(2,2),jacb_inv(3,2),0.,jacb_inv(1,2),jacb_inv(2,2),jacb_inv(1,2),
0./),(/6,3/),order=(/2,1/))
B_4=reshape((/jacb_inv(1,3),0.,0.,0.,jacb_inv(2,3),0.,0.,0.,jacb_inv(3,3),0
.,jacb_inv(3,3)&
&,jacb_inv(2,3),jacb_inv(3,3),0.,jacb_inv(1,3),jacb_inv(2,3),jacb_inv(1,3),
0./),(/6,3/),order=(/2,1/))
H=reshape((/1-nu,nu,nu,0.,0.,0.,nu,1-nu,nu,0.,0.,0.,nu,nu,1-nu,0.,0.,0.,0.,0.,0.,(1-2*nu)/2,0.,0.,0.,0.,&
&0.,0.,(1-2*nu)/2,0.,0.,0.,0.,0.,0.,(1-2*nu)/2/),(/6,6/),order=(/2,1/)) 111
function pour calculer le coefficient multiplicateur de Ke
vol=36*((1/6.)*det_jab(x_1,y_1,z_1,x_2,y_2,z_2,x_3,y_3,z_3,x_4,y_4,z_4))*(1
-2*nu)*(1+nu)
11111111111111 appel des procedures
call table_Bi(1.,B1);call table_Bi(2.,B2);call
table_Bi(3.,B3);call
table_Bi(4.,B4)
call produit(B_1,B1,lin,3,3,col,res1);call
produit(B_2,B2,lin,3,3,col,res2) call produit(B_3,B3,lin,3,3,col,res3);call
produit(B_4,B4,lin,3,3,col,res4) B=res1+res2+res3+res4;Bt=transpose(B)
call produit(Bt,H,12,6,6,6,res5);call
produit(res5,B,col,lin1,lin,col,ke) call system('mkdir
c:\matrice_K_B')
open(unit=20,file='
c:\matrice_K_B\metrice_K.txt',status='unknown')
write(20,15)"+
+"
write(20,15)"| Matrice de rigidité
élémentaire d'un élément tétraédrique
à 4 noeuds|"
write(20,15)"+
+"
15 format(A)
write(20,16);16 format(/:)
11111111111 écriture des noeuds
write(20,18)"+ +"
write(20,18)"| Coordonnées des noeuds
(x, y, z) |"
write(20,25)"+ +"
18 format(x,A);25 format(x,A,/:)
do i=1,4
write(20,19)"Noeud ",i,"|"
87 /176
Chapitre 3
19 format(A,x,I1,2x,A,x,$)
do j=1,3
write(20,21)c_noeud(j,i),"|"
21 format(F8.4,x,A,$)
enddo
write(20,22);22 format(2/:)
enddo
!!!!!!!!!!!! écriture la matrice Ke
write(20,23)"Ke =",E/vol,"*"
23 format(A,x,F18.4,x,A)
do i=1,12
write(20,11)"|"
11 format(x,A,x,$)
do j=1,12
write(20,12)ke(i,j)
12 format(F8.4,x,"|",$)
enddo
write(20,13);13 format(/:)
enddo
close(20)
call system('start
c:\matrice_K_B\metrice_K.txt')
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
end program
!
!procédure pour la table de localisation pour les
matrices Bi
!cette sous routine permet d'insérer la matrice
identité à la
!place de Bi
!
subroutine table_Bi(col,tab)
integer i,j
real::col
real, dimension(1:3,1:12)::tab
tab=0;j=3*col-2
do i=1,3
tab(i,j)=1;j=j+1
enddo
return
end
!procédure pour calculer les termes ji la matrice
jacobienne inverse
!
! procédure pour calculer le déterminant de la
matrice
! de la matrice jacobienne de transformation
!warning: cette procédure est pour ce cas
spécificique
!il ne peut être utilisé pour calculer le
déterminant d'1e autre matrice
function
det_jab(x_1,y_1,z_1,x_2,y_2,z_2,x_3,y_3,z_3,x_4,y_4,z_4)
real::
x_1,y_1,z_1,x_2,y_2,z_2,x_3,y_3,z_3,x_4,y_4,z_4,det_jab
det_jab=((x_2-x_1)*(y_3-y_1)*(z_4-z_1)+(y_2-y_1)*(z_3-z_1)*(x_4-x_1)+&
&(z_2-z_1)*(x_3-x_1)*(y_4-y_1)-(x_2-x_1)*(z_3-z_1)*(y_4-y_1)-(y_2-&
&y_1)*(x_3-x_1)*(z_4-z_1)-(z_2-z_1)*(y_3-y_1)*(x_4-x_1))
return
end function det_jab
!
subroutine produit(mat1,mat2,n,c,n1,c1,res)
integer::i,j,k,n,c,n1,c1
real, dimension(1:n,1:c1)::res
real, dimension(1:n,1:c)::mat1
real, dimension(1:n1,1:c1)::mat2
do i=1,n
do j=1,c1
res(i,j)=0.
do k=1,c
res(i,j)=res(i,j)+mat1(i,k)*mat2(k,j)
enddo
enddo
Chapitre 3
enddo
end subroutine produit
3.3.5.3. Exemple de l'exécution du programme Input
:
,
|
Noeu n°
|
x
|
y
|
z
|
|
1
|
0.75
|
0.33
|
0.1
|
|
2
|
1.01
|
0.1
|
0.05
|
|
3
|
0.02
|
1.11
|
0.12
|
|
4
|
0.105
|
0
|
1.2
|
Tableau 3.2 : Valeurs d'essai pour le test du programme
matrice_K
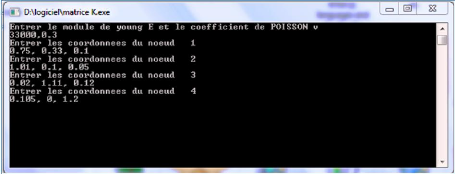
Figure 3.7 : Capture d'écran des données en Input
du programme matrice_K
88 /176
Output :
Chapitre 3
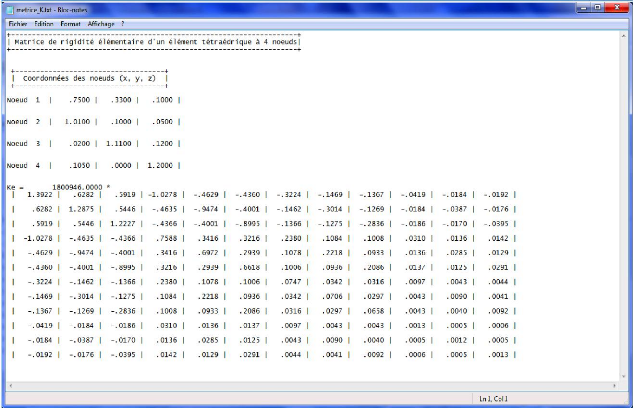
89 /176
Figure 3.8 : Capture d'écran des données en
Output du programme matrice_K
90 /176
Chapitre 4
Chapitre 4 : Modélisation et Simulation
numérique d'un tablier de pont
Sommaire
|
4.1.
|
Matériels employés pour la simulation
|
91
|
|
4.2.
|
Présentation générale de l'ouvrage
|
92
|
|
4.3.
|
Caractéristiques du Tablier
|
94
|
|
4.4.
|
Définition des charges et actions
appliquées à la structure
|
99
|
|
4.5.
|
Définition du flux de travail
|
109
|
|
4.6.
|
Définition de la structure
|
110
|
|
4.7.
|
Construction du modèle éléments
finis (EF)
|
116
|
|
4.8.
|
Introduction des conditions de fixations (Appuis)
|
118
|
|
4.9.
|
Choix des normes et règlements à utiliser
|
119
|
|
4.10.
|
Définitions des charges
|
120
|
|
4.11.
|
Lancement des calculs de la structure
|
128
|
|
4.12.
|
Résultats de calcul
|
129
|
|
4.13.
|
Définition des combinaisons d'actions
|
134
|
|
4.14.
|
Exploitation des résultats
|
136
|
91 /176
Chapitre 4
4.1. Matériels employés pour la
simulation
La conduite de la simulation numérique a
été possible grâce à l'utilisation d'un ordinateur
et de certains logiciels
4.1.1. Ordinateur
L'ordinateur utilisé est un Acer Aspire 5742. Ces
caractéristiques sont les suivantes :
Processeur : Intel® CoreTM i5 CPU M480 @ 2.67GHz 2.97
GHz
Mémoire installée (RAM) : 4 Go (3.68 Go utilisable)
Type du système : Système d'exploitation 64 bits
Disque dur : 450 Go
4.1.2. Logiciel Autodesk AutoCAD 2012
Le logiciel Autodesk AutoCAD 2012 a été
utilisé pour représenter les axes de notre structure. Le fichier
des axes sera ensuite importé, en fond, dans le logiciel Autodesk Robot
SAP 2012 pour procéder à la modélisation numérique
de la structure.
4.1.3. Logiciel Autodesk Robot SAP 2012
Le logiciel Autodesk Robot SAP 2012 a été choisi
pour modéliser, simuler le comportement, analyser et dimensionner notre
structure, car son code de calcul est basé sur la méthode des
éléments finis.
4.1.3.1. Description générale du
logiciel Autodesk Robot SAP 2012
A
utodesk Robot SAP est une
plate-forme logicielle destinée aux ingénieurs. Elle permet de
modéliser, de concevoir, d'analyser n'importe quel type de structure.
Il effectue plusieurs types d'analyses :
· l'analyse statique
· l'analyse harmonique
· l'analyse temporelle (linéaire et
non-linéaire)
· l'analyse Push-over
· l'analyse élasto-plastique des barres
· l'analyse Footfall
92 /176
Chapitre 4
? l'analyse Frequency Response Functions
Dans notre étude, seule l'analyse statique
sera effectuée. Bien que le logiciel robot soit un outil souple
de calcul en ingénierie, l'utilisateur doit être capable de
générer un modèle adéquat et fonctionnel
d'éléments finis de la structure, de l'analyser,
d'interpréter correctement les résultats de l'analyse et
d'exploiter les résultats pour le dimensionnement de la structure.
Pour effectuer toute analyse statique, l'équation
caractéristique que le programme établit et résout est du
type de [ K]( U) = ( F) qui relie le vecteur des forces
généralisées et les déplacements aux noeuds, de la
structure maillée, par l'intermédiaire de la matrice de
rigidité globale.
Pour l'analyse des structures de types plaques et coques, les
modèles éléments finis sont construits en utilisant des
éléments triangulaires à 3 ou 6 noeuds ou
quadrangulaires à 4 ou 8 noeuds.
4.2. Présentation générale de
l'ouvrage
La réalisation de l'ouvrage, objet de la
présente étude, s'inscrit dans le cadre des travaux
d'aménagement et de bitumage des tronçons «
frontière TOGO - TCHETTI - SAVALOU (42 km) » et « LOGOZOHE -
GLAZOUE (17 KM) ».
Il s'agit d'un pont à poutre, à 3
travées indépendantes, d'une longueur totale de 50 m, à
construire sur le tronçon 1 : « frontière TOGO-TCHETTI
SAVALOU » au PK 23+200.
Le pont reposera sur des fondations superficielles par
l'intermédiaire des piles, et de deux culées aux
extrémités, comme le montre le rendu photo-réaliste
suivant :
93 /176
Chapitre 4
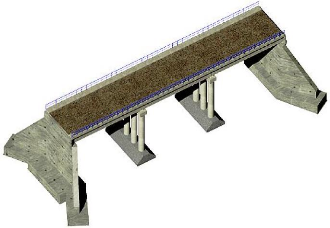
Figure 4.1 : Vue aérienne du pont
Le profil en travers du pont suit la disposition ci-contre :
? Largeur de la chaussée : 7.00 m (2 voies de
circulation). La chaussée est déversée en toit, à
2.5% de pente.
? 2 trottoirs de 1.15 m de largeur chacun,
équipés de garde-corps métalliques en encorbellements
latéraux, soit une largeur totale de 9.00 m.

Figure 4.2 : Trottoir équipé de garde-corps
Notre étude ne consiste pas en une
étude technique détaillée du pont, mais en une simulation
numérique de son tablier.
94 /176
Chapitre 4
4.3. Caractéristiques du Tablier
Le Tablier de longueur totale 50 m est constitué de :
? Une dalle sous chaussée ;
? Des nervures, associées à la dalle sous
chaussée, appelées
poutres ;
? Des entretoises solidaires des poutres et de la dalle sous
chaussée.
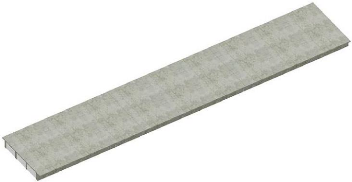
Figure 4.3 : Vue de dessus du tablier
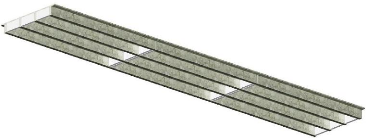
Figure 4.4 : Vue de dessous du tablier
95 /176
Chapitre 4
4.3.1. Les poutres
Le pont comportera 4 poutres (40 cm x 150 cm), par
travée, espacées de 2.00 m chacune et un encorbellement de part
et d'autre de 75 cm.
Sur les 1ère et 3ème
travées, les poutres possèdent une longueur totale de
16.805 m et portent sur 16.48 m ; tandis que sur la travée du milieu,
elles possèdent une longueur totale de 16.27 m et portent sur 15.96
m.
Des joints de dilatations de 3 cm sont insérés
au début et à la fin de chaque travée.
4.3.2. Les entretoises
Les entretoises (30 cm x 140 cm) ont pour but de solidariser
les poutres entre elles. Elles reportent l'effet des charges sur les
différentes poutres.
La Longueur de chaque entretoise est 7.80m. Le nombre
d'entretoises de chaque travée sera de 2 avec un espacement entre nus
d'entretoise de 16.18 m.
4.3.3. La dalle sous chaussée
Une dalle en Béton Armé sera coulée sur
place. Il est supporté par un réseau de poutres et d'entretoise
qui le découpent en dalle de côté a et b avec :
? a=2.60 m et b=16.48 m sur les 1ère et
3ème travées ; ? a=2.60 m et b=16.27 m sur la
2ème travée.
La dalle possède une épaisseur ht= 20 cm.
96 /176
Chapitre 4
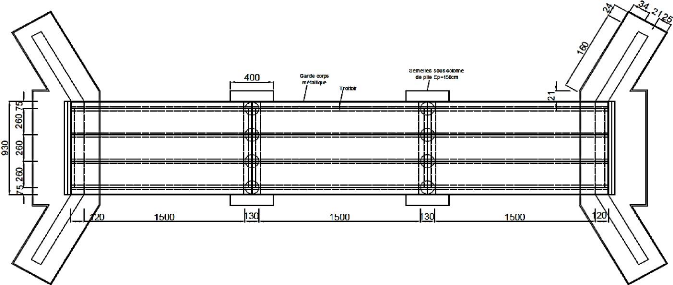
Figure 4.5. Vue en plan générale
Chapitre 4
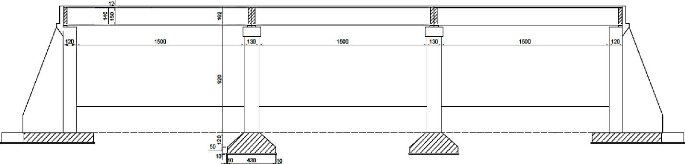
97 /176
Figure 4.6 : Coupe longitudinale axiale
Chapitre 4

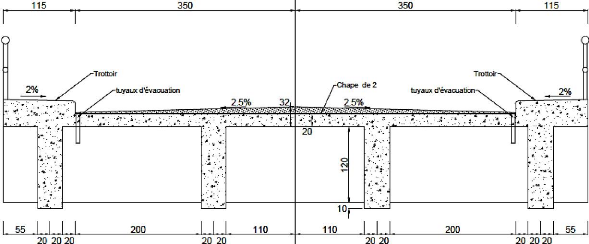
98 /176
Figure 4.7 : Coupe transversale du tablier
99 /176
Chapitre 4
4.4. Définition des charges et actions
appliquées à la structure 4.4.1. Charges
permanentes
Elles résultent du poids propre :
? des éléments du tablier
- dalle sous chaussée ;
- entretoises ;
- poutres ;
? des revêtements du tablier :
- couche d'étanchéité (à
base d'asphalte) ;
- couche de roulement (béton bitumineux) ;
? des autres équipements portés par le tablier
:
- trottoir ;
- dispositifs de retenue.
Les poids propres des éléments du tablier sont
pris en compte directement lors de la modélisation dans le logiciel
Autodesk Robot SAP.
Les valeurs des autres charges permanentes peuvent être
estimées comme suit :
Equipements
|
ép(cm)
|
g
|
|
Étanchéité
|
2
|
0.44
|
KN/m2
|
Couche de roulement
|
10
|
2.5
|
|
31
|
7.75
|
|
-
|
0.5
|
KN/m
|
|
Tableau 4.1 : Charges permanentes
100 /176
Chapitre 4
4.4.2. Charges d'exploitations
4.4.2.1. Charges sur les trottoirs
D'après le fascicule 61 titre II du Cahier des
Prescriptions Communes (CPC), une charge uniforme de 1.5
kN/m2 est supportée par chaque trottoir du pont.
4.4.2.2. Charges de chaussée
Elles sont directement liées aux charges
routières ; Le Fascicule 61 Titre II du Cahier des Prescriptions
Communes (CPC) définit deux « systèmes », distincts et
indépendants, de charges routières à caractère
normal : le système A et le système
B.
Nos justifications, après comparaison, ne
feront état que du système dont les effets sont les plus
importants.
Le pont à construire sur le tronçon 1 : «
frontière TOGO-TCHETTI SAVALOU » au PK 23+200, possède une
largeur roulable LR = 7.00 m ;
La chaussée étant encadrée par deux
bordures, la largeur chargeable (Lc) se retrouve confondue avec la
largeur roulable. Nous avons alors :
Lc = LR = 7.00 m
On distingue trois classes de ponts, en fonction de leur largeur
roulable :
Classe
|
Largeur roulable
|
I
II
III
|
= 7 m
5.50 m < LR < 7 m
= 5.50 m
|
|
Tableau 4.2 : Classe de pont en fonction de la largeur
roulable
Il apparait alors, au vu de la classification
précédente, que le pont, objet de notre étude, est de
1ère classe.
101 /176
Chapitre 4
4.4.2.3. Système A
Le système A se compose d'une charge
uniformément répartie dont l'intensité dépend de la
longueur chargée suivant la loi :
(L)
L étant la longueur chargée, exprimé en
m.
Nous disposerons les charges entre zéros de
ligne d'influence de façon à obtenir le maximum de l'effet
recherché et on l'appliquera, moyennant certains coefficients
pondérateurs, sur toute la partie de la largeur chargeable de chaque
travée.
Tout d'abord, la densité A(L) est
multipliée par un coefficient a1, assimilable à
un coefficient de dégressivité transversale,
donné dans le tableau ci-dessous :
Classe
|
Nombre de voies chargées
|
du pont
|
1
|
2
|
3
|
4
|
5
|
I
|
1
|
1
|
0.9
|
0.75
|
0.75
|
II
|
2
|
0.9
|
-
|
-
|
-
|
III
|
0.9
|
0.8
|
|
|
|
|
Tableau 4.3 : Coefficient de dégressivité
transversale de la charge A(L)
La densité de charge effective q(L) peut être mise
sous la forme :
q(L) = Sup( a1A(L) ; ( 4 -- 0.002L)}
KN/m2
La charge de calcul est :
Q = Y * * q (L) KN/m
Avec : a2=v0/v, v étant la largeur d'une
voie
v0=3.50 m pour les ponts de 1ère
classe
v0=3.00 m pour les ponts de 2ème
classe
v0=2.75 m pour les ponts de Sème
classe
102 /176
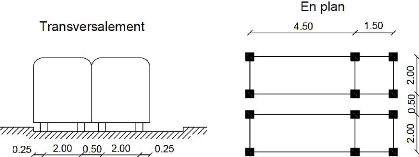
Chapitre 4
Le coefficient pondérateur vaut 1.20 à l'ELS et
1.07 x 1.5 à l'ELU.
Dans le cadre de notre simulation, nous évaluerons les
charges de calcul sans pondérations ; en effet, les coefficients de
pondération seront pris en compte lors de la définition des
combinaisons d'actions dans le logiciel Autodesk Robot SAP.
? Evaluation de la charge de calcul pour le
pont
Tableau 4.4 : Coefficients a1 et a2
Pour les 1ère et 3ème
travées, la charge de calcul prend la valeur suivante :
* ( ) ( )+
Pour la 2ème travée :
* ( ) ( )+
4.4.2.4. Système B
Le système de charges B comprend trois
sous-systèmes distincts :
- le sous-système Bc qui se compose de camion
type ;
- le sous-système Br qui se compose d'une roue
isolée ;
- et le sous-système Bt qui se compose de groupes de
deux
essieux dénommés essieux tandems.
Pour la simulation, on s'intéressera essentiellement aux
effets provenant
des sous-systèmes Bc et Bt.
103 /176
Chapitre 4
? Sous-système Bc
Le sous-système Bc se compose de camions de
poids individuel égal à 30 t, soit 300 kN.
On disposera autant de files de deux camions au maximum que de
voies de circulation, soit au total deux files de camions pour notre
ouvrage.
Le convoi de charges du système Bc se
représente schématiquement comme suit :


Figure 4.8 : Convoi de charges du système Bc
Figure 4.9 : système Bc en vue transversale et en
plan
Il est affecté d'un coefficient de pondération
bc (dégressivité transversale)
donné dans le tableau ci-dessous :
Chapitre 4
Classe du
|
Nombre de voies chargées
|
pont
|
1
|
2
|
3
|
4
|
5
|
I
|
1.2
|
1.1
|
0.95
|
0.80
|
0.70
|
II
|
1
|
1
|
-
|
-
|
-
|
III
|
1
|
0.8
|
|
|
|
|
Tableau 4.5 : Coefficient de dégressivité
transversale bc ? Sous-système Bt
Le sous-système Bt se compose de deux tandems à
deux essieux de quatre roues chacun, le poids de chaque essieu étant de
16 t, soit 160 kN :
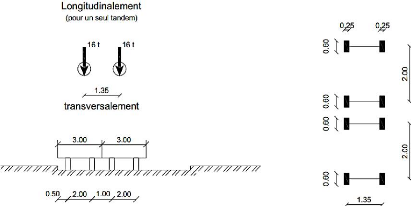
104 /176
Figure 4.10 : Système Bt en vue transversale,
longitudinale et en plan
Il est affecté d'un coefficient de pondération
bt choisi selon le tableau suivant :
Classe du pont
|
Première
|
Deuxième
|
Coefficient
|
1.0
|
0.9
|
|
Tableau 4.6 : Coefficient de dégressivité
transversale bt
105 /176
Chapitre 4
Qu'il s'agisse du sous-système Bc ou du
sous-système Bt, la charge de calcul vaut :
b = bc ou bt selon le cas
6 = coefficient de majoration dynamique :
Le coefficient vaut 1.20 à l'ELS et 1.07 x 1.5 à
l'ELU.
? Calcul du coefficient de majoration dynamique applicable aux
poutres (61)
Avec :
L : Longueur de la travée étudiée ;
G : poids total de ladite travée ;
S : poids total maximal des essieux du système B
(Bc ou Bt).
De manière à uniformiser la charge de calcul
à prendre en compte, lors du processus de simulation, pour toutes les
travées du pont, nous maximiserons le coefficient 61 en prenant la plus
petite valeur possible pour L et la valeur de G qui lui correspond.
Cela revient à définir L tel que :
L = Min (L1, L2, L3)
Avec:
Li: Longueur de la travée i
106 /176
Chapitre 4
- Calcul de L :
L1
|
16.805 m
|
L2
|
16.27 m
|
L3
|
16.805 m
|
Min (L1, L2, L3)
|
16.27 m
|
|
Tableau 4.7 : Tableau de détermination de la longueur L
pour le calcul de ä1
L= 16.27 m
- Calcul de G :
Poutre
|
976,20 kN
|
Entretoise
|
163,80 kN
|
Dalle sous chaussée
|
756,56 kN
|
Couche de roulement
|
284,73 kN
|
Étanchéité
|
51,76 kN
|
Garde-corps
|
16,27 kN
|
Trottoir
|
290,01 kN
|
G
|
2615,73 kN
|
|
Tableau 4.8 : Tableau de détermination de la valeur de
G pour le calcul de ä1
G= 2615,73 kN
- Calcul de S
Sbc = 2*(120+120+60+120+120) = 540 kN
Sbt = 720 kN
Chapitre 4
( 61bC' 61b )
Calcul du coefficient de majoration dynamique applicable
à la dalle sous chaussée (62)
- Longueur L à considérer :
Largeur roulable : LR=7.00 m
Distance entre plans moyens des poutres de rive :
L= 7.80 m.
- Calcul de G
Dalle sous chaussée
|
362,70 kN
|
Couche de roulement
|
136,50 kN
|
Étanchéité
|
24,02 kN
|
Garde-corps
|
7,80 kN
|
Trottoir
|
139,04 kN
|
G
|
670,06 kN
|
|
Tableau 4.9 : Tableau de détermination de la valeur de
G pour le calcul de 62
107 /176
- Calcul de S
108 /176
Chapitre 4
Sbc = 2*(120+120) = 480 kN
Sbt = 720 kN
( 62bC'
62b )
Nous résumons les différentes valeurs du
coefficient de majoration dynamique dans le tableau ci-dessous :
Eléments
|
Poutres
|
Dalle sous chaussée
|
6
|
1,134
|
1.285
|
|
Tableau 4.10 : Tableau récapitulatif des valeurs de
6
Les valeurs des charges du système B seront
multipliées, dans un premier temps, par le produit de coefficients 6*b,
puis par le coefficient y selon l'état limite
considéré.
Pour des raisons de commodité, nous choisissons de ne
tenir compte, à l'étape actuelle, que du produit de coefficients
6*b dont les valeurs se résument dans le tableau suivant.
109 /176
Chapitre 4
|
Sous-système Bc
|
Sous-système Bt
|
Poutres
|
1.247
|
1.134
|
Dalle sous
chaussée
|
1.414
|
1.285
|
|
Tableau 4.11 : Tableau récapitulatif des valeurs du
produit de coefficients ä*b
Le coefficient pondérateur y sera introduit lors de la
définition des combinaisons d'actions dans le logiciel Autodesk Robot
SAP 2012.
4.5. Définition du flux de travail
La modélisation et la simulation du tablier, du pont, se
feront en complétant les différentes étapes ci-dessous
:
· Définition de la structure
· Construction du modèle éléments
finis (EF)
· Introduction des conditions de fixations (Appuis)
· Choix des normes et règlements à
utiliser
· Définitions des charges
· Lancement des calculs de la structure
· Résultats de calcul
· Définition des combinaisons d'actions
· Exploitation des résultats
Chapitre 4
4.6. Définition de la structure
Les lignes de construction forment une grille auxiliaire qui
facilite la définition des différents éléments de
la structure et permet de se référer aux composants de cette
structure (c'est-à-dire de les sélectionner).
4.6.1. Création des lignes de construction dans
Autocad
Il est parfois plus aisé de crée les lignes de
construction dans Autocad en vue d'une importation dans Robot. Cette
procédure sera utilisée pour implanter les axes de la structure
de notre Tablier.


Figure 4.11 : Axes de construction créés dans
Autocad
4.6.2. Importation des lignes de construction dans Robot
SAP
menu Fichier/Importer/Fonds DXF, DWG

110 /176
Figure 4.12 : Importation des Axes de constructions
Chapitre 4
Après la sélection du fichier dwg/dxf, la boite
ci-dessous permet de définir les paramètres d'insertion du
fichier dwg/dxf.
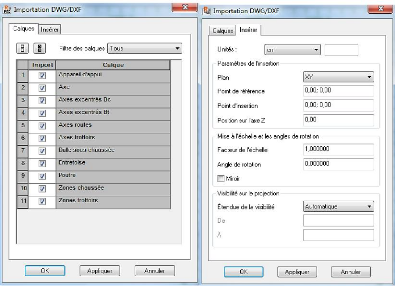
Figure 4.13 : - Boite de dialogue - Importation des fichiers
dwg/dxf
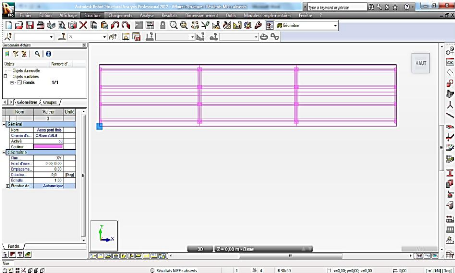
111 /176
Figure 4.14 : Axes de constructions importés dans
Robot
112 /176
Chapitre 4
4.6.3. Création de la géométrie
4.6.3.1. Définition des poutres et
entretoises
Pour des raisons de concisions, nous ne décrirons pas la
procédure de définitions de ces éléments.
La géométrie, après la définition des
poutres et entretoises, se présente comme suit :
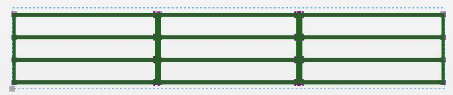
Figure 4.15 : Définition des poutres et entretoises
4.6.3.2. Modélisation des dalles
sous-chaussées

Pour la définition de ces éléments, la
procédure suivante est adoptée :
? Choix de l'outil Panneaux :
Structure/Panneaux
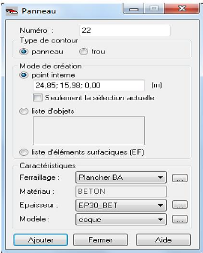
Figure 4.16 : - Boite de dialogue - Panneaux
113 /176
Chapitre 4
|
? Clic sur le bouton panneau dans
type de contour
|
|
? Définition des caractéristiques
:
- Clic sur le bouton dans
(On définit les paramètres dans chaque onglet
conformément aux figures suivantes
et on clique sur le bouton )
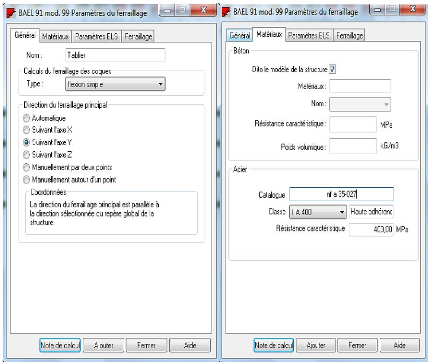
Figure 4.17 : - Boite de dialogue - Paramètre de
ferraillage, Onglets Général et
Matériaux
114 /176
Chapitre 4
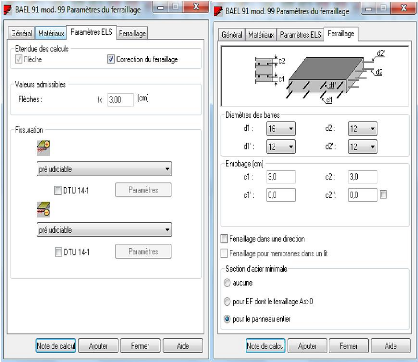
Figure 4.18 : - Boite de dialogue - Paramètre de
ferraillage, Onglets Paramètre ELS
et Ferraillage
- Clic sur le bouton dans
(on définit les paramètres comme sur la figure
suivante et on clique sur
)
115 /176
Chapitre 4
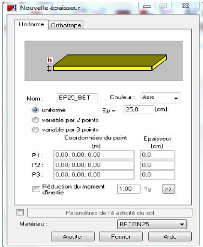
Figure 4.19 : - Boite de dialogue - Nouvelle
épaisseur

- Clic sur le bouton dans
(on définit les paramètres comme sur la figure
suivante et on clique sur
)
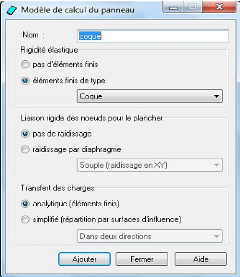
Figure 4.20: - Boite de dialogue - Modèle de Calcul du
panneau
116 /176
Chapitre 4
|
? Choix d'un point interne
|
|
(on choisit les points dans les contours importés
pour crées les dalles
sous-chaussées)
La définition géométrique de la structure
du Tablier se présente comme
suit :
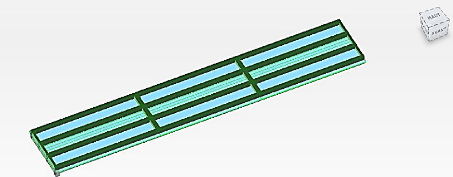
Figure 4.21 : Définition de la structure du Tablier dans
Robot
4.7. Construction du modèle
éléments finis (EF)
Le modèle EF est défini par le maillage de la
structure du Tablier.
Le maillage de la structure, dans le logiciel Robot,
nécessite de compléter les étapes suivantes :
? Sélectionner les panneaux à
mailler
? Choix de l'outil option de maillage :
Analyse/Maillage/Options de
maillage
La boite de dialogue Options de maillage permet de
définir les paramètres du maillage.
117 /176
Chapitre 4
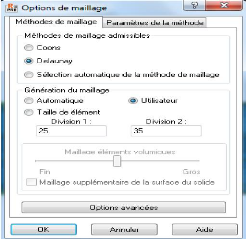
Figure 4.22 : - Boite de dialogue - Options de maillage
La procédure de paramétrage se présente
comme suit :
? Clic sur le bouton dans la boite de
dialogue option de maillage (figure 4.23)
(on définit les paramètres comme sur la figure
suivante)
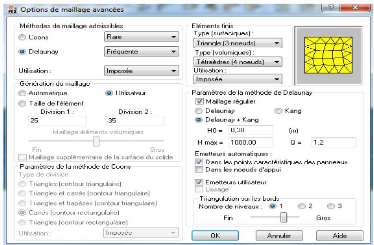
Figure 4.23 : - Boite de dialogue - Options de maillage
avancées
118 /176
Chapitre 4
? Clic sur le bouton pour valider le
modèle
|
? Clic sur le bouton Génération de
maillage
|
|
sur la barre
|
d'outils Options de génération de
maillage
Le maillage de la structure du Tablier se présente comme
suit :
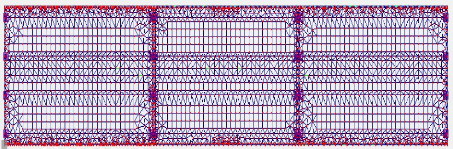
Figure 4.24 : Maillage du tablier
4.8. Introduction des conditions de fixations
(Appuis)
La procédure suivante est adoptée pour
introduire les appuis dans la structure modélisée :
? Ouverture de la boite de dialogue Appuis
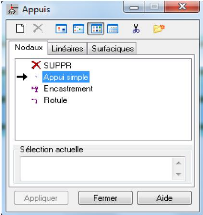
Figure 4.25 : - Boite de dialogue - Appuis
119 /176
Chapitre 4
? Mise en surbrillance du type d'appuis à
affecter

? Sélection des noeuds concernés dans le
champ Sélection
? Clic sur le bouton pour affecter les appuis
aux noeuds
concernés
La figure suivante présente le système d'appuis
utilisé pour la structure de notre tablier :
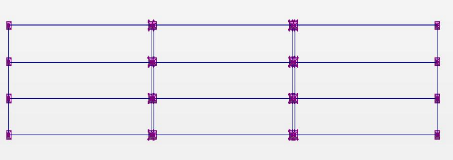
Figure 4.26 : Système d'appuis du tablier
4.9. Choix des normes et règlements à
utiliser
? Sélection de Préférence de
l'affaire : menu Outils /Préférence de
l'affaire
(on définit les paramètres conformément
à la figure 4.28 et on clique sur

pour valider le choix)
120 /176
Chapitre 4
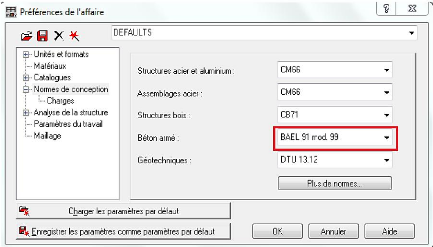
Figure 4.27 : - Boite de dialogue - Préférence de
l'affaire, choix de la norme de
conception
4.10. Définitions des charges
4.10.1. Création des Cas de Charges
La boite de dialogue cas de charge sert à
créer/modifier les cas de charges.
Le processus de création des cas de charge se
présente comme suit :

? Ouverture de la boite de dialogue cas de charges
: menu Chargement/cas de charge
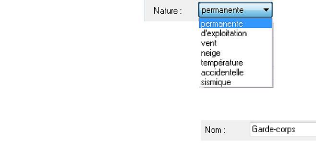
? Choix du nom de la charge
? Choix de la nature de la charge dans le champ
Nature
121 /176
Chapitre 4
? Clic sur le bouton pour créer le cas de
charges
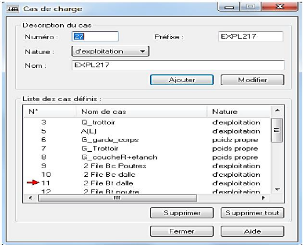
Figure 4.28 : - Boite de dialogue - Cas de charge
4.10.2. Définition des charges 4.10.2.1. Charges
statiques
La boîte de dialogue Charge sert à définir
les charges pour les cas de charge créés.
Remarque : Au moins un cas de charge doit être
défini avant d'utiliser cette boite de dialogue.
Le processus de création des cas de charge se
présente comme suit : ? Ouverture de la boite de dialogue charge
:
menu Chargement/Définir charge .
La partie supérieure de la boîte de dialogue
affiche deux informations : le cas de charge sélectionné (nom et
numéro) pour lequel la charge sera définie le type de charge
appliquée aux barres/noeuds de la structure.
? Saisie de la valeur de la charge
? Saisie des numéros des éléments de
structure (barres, noeuds,
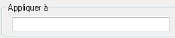
panneaux), auxquels la charge sera affectée, dans
le champ
Chapitre 4
? Clic sur le bouton pour procéder
à l'affectation de la
charge définie aux éléments dont les
numéros ont été saisis dans le champ Appliquer
à
4.10.2.2. Charges roulantes
L'option permettant de définir des charges roulantes
permet d'analyser une structure avec un déplacement des charges
appliquées.
Le processus de création et de définition des
charges roulantes se présente comme suit :
:
? Ouverture de la boite de dialogue charges
roulantes
menu Chargement/autres charges/Roulantes
Figure 4.29 : - Boite de dialogue - Charges roulantes
Les charges roulantes sont définies par la
description du convoi et de sa route sur la structure. Le convoi est un
ensemble de force à directions, valeurs et positions données.
Pour chaque pas, le convoi est déplacé d'une position vers la
position suivante ; l'ensemble de forces appliquées aux
éléments est créé pour chaque position. Par
conséquent, le cas de charge roulante est considéré comme
un ensemble de plusieurs cas de charge statiques (un cas de charge pour chaque
position du convoi).
122 /176
? Sélection ou création du convoi qui
sollicitera la structure
123 /176
Chapitre 4
Pour sélectionner le convoi, on le met en
surbrillance sur la liste de types de convois actifs
Pour créer un nouveau convoi, on ouvre la boite de
dialogue suivante par un clic sur
|
l'icône
|
, et procède au paramétrage
nécessaire
|
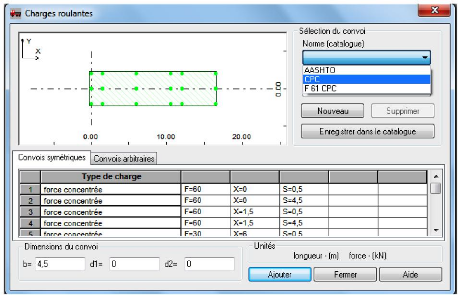
Figure 4.30 : - Boite de dialogue - Charges roulantes
La définition du convoi peut être
composée de forces concentrées, linéaires ou surfaciques
au contour rectangulaire.
Dans cette boîte de dialogue, on sélectionne le
convoi qui sera ajouté à la liste active des convois
affichée dans la boîte de dialogue Charges roulantes.
Dans notre cas, la définition du convoi est
uniquement composée de forces
concentrées.
? Définition de l'itinéraire/route du
convoi
124 /176
Chapitre 4
Pour définir la route du convoi, on clique sur le
bouton ,
(- Boite de dialogue - Charges roulantes), qui ouvre la
boîte de dialogue Polyligne - contour.
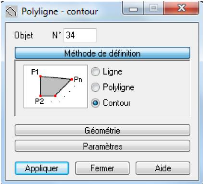
Figure 4.31 : - Boite de dialogue - Polyligne-contour
Un clic sur le bouton Paramètres ,
(- Boite de
dialogue - Charges roulantes), ouvre une boîte de
dialogue supplémentaire dans laquelle vous pourrez définir les
coefficients multiplicateurs : coefficient de majoration dynamique,
coefficient de frottement des pneus.
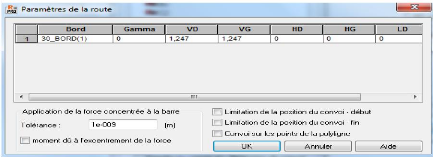
Figure 4.32 : - Boite de dialogue - Paramètres de la
route
Les paramètres suivants , (- Boite de dialogue
-
Charges roulantes), définissent un déplacement
de charge :
- Pas : indique la valeur du pas pris pour le mouvement du
convoi.
- Direction de la charge : indique la direction des
efforts définissant le convoi.
125 /176
Chapitre 4
Un clic sur ce bouton crée un nouveau cas de charge
roulante.
La structure du tablier est sollicitée par plusieurs cas
de charges dont certains sont représentés sur les figures
ci-dessous :
Les numéros - noms attribués à ces cas
sont conformes à ceux définis dans Robot.
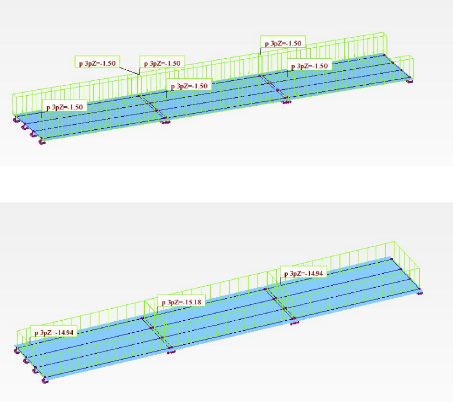
Figure 4.33 : Cas 3 - Q_trottoir : Charge d'exploitation des
trottoirs
Figure 4.34 : Cas 5 À A(L) : Surcharge A(L)
126 /176
Chapitre 4
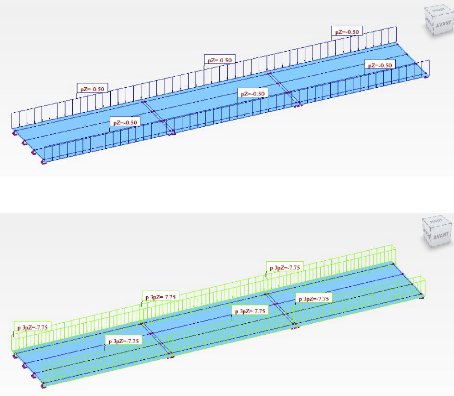
Figure 4.35 : Cas 6 -- G_garde_corps : Poids propre des
Garde-corps
Figure 4.36 : Cas 7 -- G Trottoir : Poids propre des
trottoirs
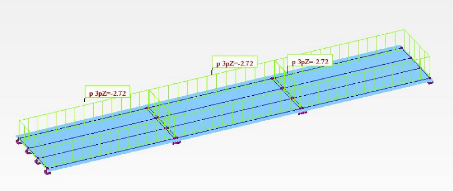
Figure 4.37 : Cas 8 -- G_coucheR+etanch : Poids propre
Couche de roulement &
étanchéité
127 /176
Chapitre 4
Nous créons deux variantes, pour chaque
sous-système de charge B, qui diffèrent l'une de l'autre par leur
disposition transversale. Nous avons donc les cas suivants :

Figure 4.38 : Cas 9 - 2 File Bc Poutres : deux files du convoi
de camions Bc
(disposition adoptée pour les poutres)

Figure 4.39 : Cas 10 - 2 File Bc Dalle : deux files du convoi
de camions Bc
(disposition adoptée pour la dalle)

Figure 4.40 : Cas 11 - 2 File Bt Dalle : groupes de deux
essieux-tandems
(disposition adoptée pour les poutres)

Figure 4.41 : Cas 12 - 2 File Bc Dalle, deux files du convoi de
camions Bc
(disposition adoptée pour la dalle)
128 /176
Chapitre 4
4.11. Lancement des calculs de la structure
On procède au lancement des calculs en
sélectionnant l'outil
menu Analyse/Calcul
La boite de dialogue suivante apparait
|
|
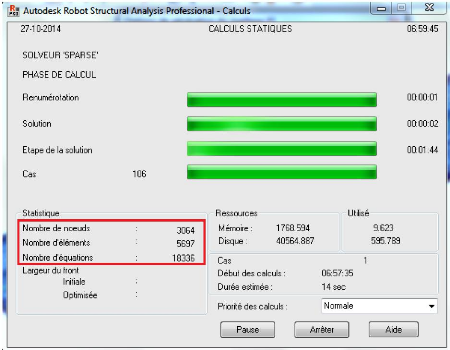
Figure 4.42 : - Boite de dialogue - Calcul
La zone statistique, encadrée en rouge, de la boite de
dialogue Calcul fournit les informations relatives au modèle EF
étudié et le nombre d'équations résolu dans les
calculs.
On peut lire ainsi que, le modèle EF de notre tablier,
comporte 3064 noeuds et 5697
éléments finis. En outre, le système
d'équations résolu par le logiciel comporte 18336
équations.
129 /176
Chapitre 4
4.12. Résultats de calcul
4.12.1. Panneaux
4.12.1.1. Cartographies des panneaux
A travers un processus itératif de recherche des effets
les plus défavorables, basé sur l'observation des valeurs de la
contrainte normale ayy dans la direction principale
de portance des panneaux de dalles, nous avons faire ressortir les
cartographies des contraintes ayy suivantes :
La 1re travée et la 3e
travée étant identiques, les résultats obtenus pour la
3e travée sont valables pour la 1re
travée.
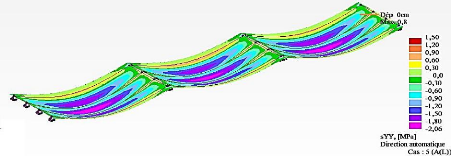
Figure 4.43 : Cartographie des contraintes
ayy relatives au système de charges
A
(Travées 1, 2 et 3)
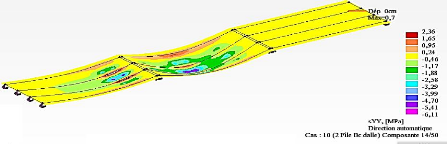
Figure 4.44 : Cartographie des contraintes
ayy relatives aux convois de charges Bc
(Travée 2)
130 /176
Chapitre 4
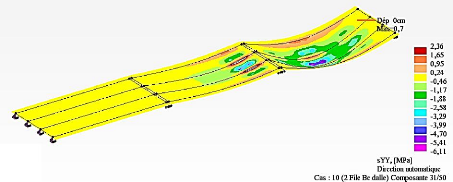
Figure 4.45 : Cartographie des contraintes
æyy relatives aux convois de charges Bc
(Travée 3)
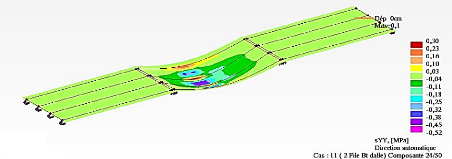
Figure 4.46 : Cartographie des contraintes
æyy relatives aux groupes
d'essieux-
tandems (Travée 2)
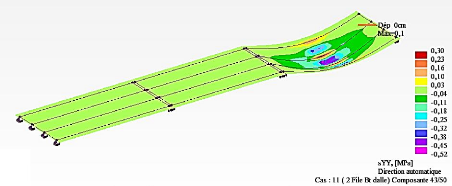
Figure 4.47 : Cartographie des contraintes
æyy relatives aux groupes
d'essieux-
tandems (Travée 3)
131 /176
Chapitre 4
Une observation des cartographies des contraintes nous permet de
déduire que le système composé de deux files de convois de
camions Bc est prépondérant.
Nous procèderons à des vérifications
supplémentaires en observant les valeurs du moment fléchissant en
des coupes effectuées sur les panneaux de dalles.
4.12.1.2. Coupes sur panneaux
Une Coupe longitudinale a été effectuée sur
l'axe des panneaux, afin de visualiser les valeurs maximales, suivant les
travées et les cas de charges, du moment fléchissant
myy en kN.m
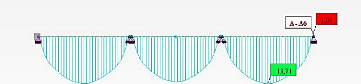
Figure 4.48 : Moment fléchissant myy dû
aux systèmes de charge A (Travées 1, 2 et
3)
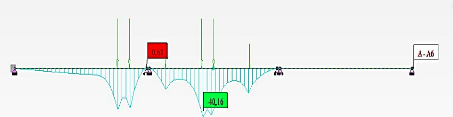
Figure 4.49 : Moment fléchissant myy dû
aux convois de charges Bc aux convois de
charges Bc (Travée 2)
Chapitre 4
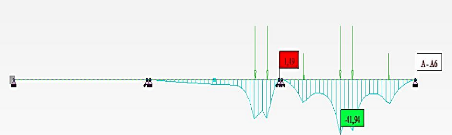
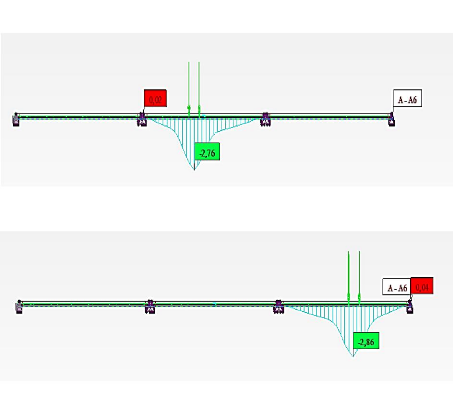
Figure 4.50 : Moment fléchissant myy dû
aux convois de charges Bc (Travée 3)
Figure 4.51 : Moment fléchissant myy dû
aux groupes d'essieux-tandems (Travée 2)
Figure 4.52 : Moment fléchissant myy dû
aux groupes d'essieux-tandems (Travée 2)
132 /176
L'observation des diagrammes du moment fléchissant
permet de déduire que le système de charges défini par
deux files de convois de camions Bc est prépondérant sur les
autres systèmes. En outre, pour un même système de charge,
les moments sont plus importants dans la 3e travée que la
2e travée.
133 /176
Chapitre 4
Pour nos justifications, nous utiliserons la composante du cas
de charge qui engendre les moments les plus importants dans la 3e
travée.
Les résultats obtenus pour cette travée seront
automatiquement adoptés pour les autres travées.
4.12.2. Barres
Les résultats les plus importants, étant obtenus
dans la 3e travée et relative aux systèmes de charges
composés de deux files de camions Bc, nos analyses se concentreront sur
les effets de ce système de charge sur les barres de structures
disposées dans cette travée.
En outre, la symétrie du système de structure
nous permet de nous limiter aux poutres situées d'un même
côté du plan de symétrie du tablier et à l'une des
entretoises de la travée.
4.12.2.1. Analyse détaillée des barres ?
Poutre de rive gauche
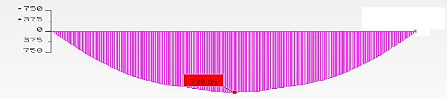
Figure 4.53 : Moment fléchissant maximum dans la poutre de
rive gauche (Travée 3)
? Poutre intermédiaire gauche
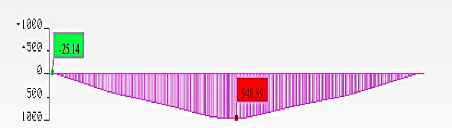
Figure 4.54 : Moment fléchissant maximum dans la poutre
intermédiaire gauche
(Travée 3)
? Entretoise d'about
134 /176
Chapitre 4
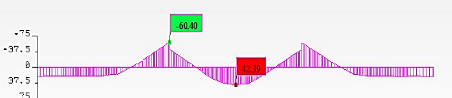
Figure 4.55 : Moment fléchissant maximum dans
l'entretoise d'about (Travée 3)
4.13. Définition des combinaisons d'actions
4.13.1. Création des composantes de cas charges
Pour chacune des positions du système de charges
composées de deux files de convois de camions Bc, nous
générons des cas de charges correspondant à ces
positionnements.
Ces cas de charges varieront d'un type d'élément du
tablier à l'autre, et leur utilisation, pour les justifications, ne sera
réservée que pour les types d'éléments de structure
pour lesquels ils ont été générés.
Le processus de création de composantes de cas de charges
se présente comme suit :
? Sélection du cas de convoi de charges dans la barre de
sélection des cas de charges
? Ouverture de la boite de dialogue composante du cas
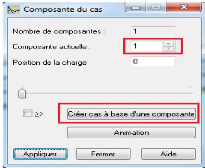
Figure 4.56 : - Boite de dialogue - composante du cas
Chapitre 4
? Sélection, dans le champ composante actuelle,
de la position du convoi de charge
? Clic sur le bouton Créer cas à base d'une
composante. 4.13.2. Génération des combinaisons d'actions
L'outil combinaisons manuelles , menu chargement sert
à définir des
coefficients pondérateurs spécifiques à
chaque type d'actions agissant sur la structure, selon l'Etat Limite
considéré.
La boite de dialogue suivante donne une illustration du cas
combinaison ELU générer pour le calcul de la dalle
sous-chaussée.
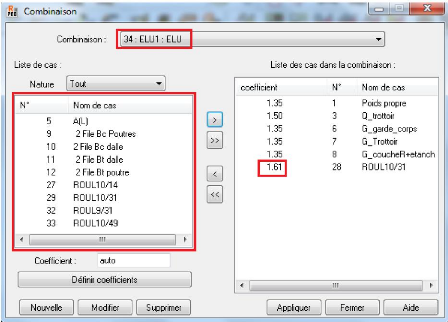
Figure 4.57 : - Boite de dialogue - Combinaison
Au niveau des zones en rouges :
135 /176
? Dans le champ combinaison :
136 /176
Chapitre 4
- Il est indiqué le numéro correspondant au cas
de charges défini par la combinaison (exp : 34) ;
- Le nom de la combinaison (exp : ELU1) ; - L'Etat
Limite considéré (exp : ELU).
? Dans le champ Nature, tous les cas de charges définis
dans le logiciel sont listés
? Dans le champ Liste des cas de la combinaison, tous les cas de
charges entrant dans la combinaison sont présents.
Chaque cas de charges porte devant lui, le coefficient qui le
pondère.
4.14. Exploitation des résultats
4.14.1. Dalle sous chaussée
4.14.1.1. Cartographies et plans
d'exécution
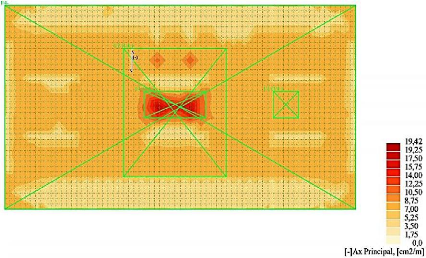
Figure 4.58 : Cartographie des sections d'aciers réels
dans la direction principale de
portance (lit inférieur)
137 /176
Chapitre 4
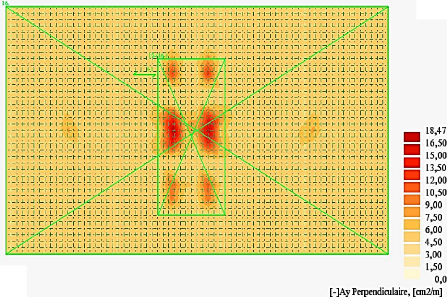
Figure 4.59 : Cartographie des sections d'aciers réels
dans la direction secondaire (lit
inférieur)
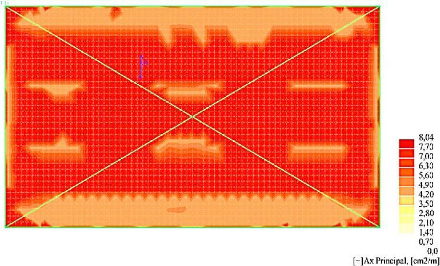
Figure 4.60 : Cartographie des sections d'aciers réels
dans la direction principale de
portance (lit supérieur)
138 /176
Chapitre 4
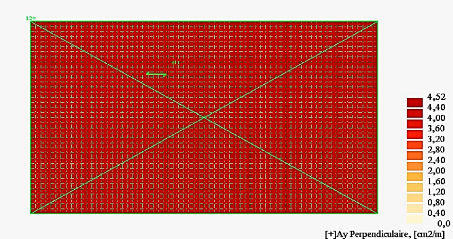
Figure 4.61 : Cartographie des sections d'aciers réels
dans la direction secondaire (lit
supérieur)
Les plans de ferraillage de la dalle sous chaussée se
présentent comme suit :
139 /176
Chapitre 4
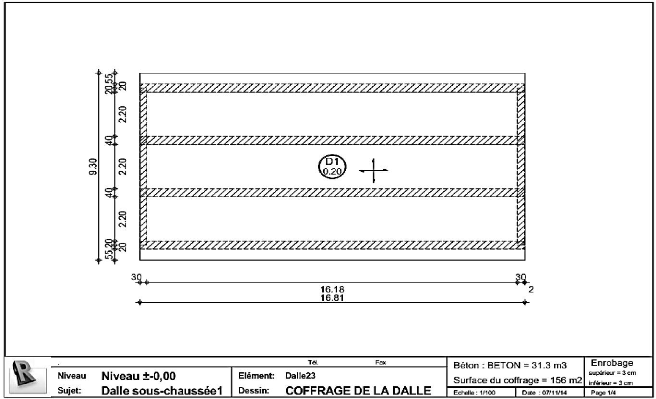
Figure 4.62 : Schéma de ferraillage dalle sous
chaussée (1/4)
140 /176
Chapitre 4
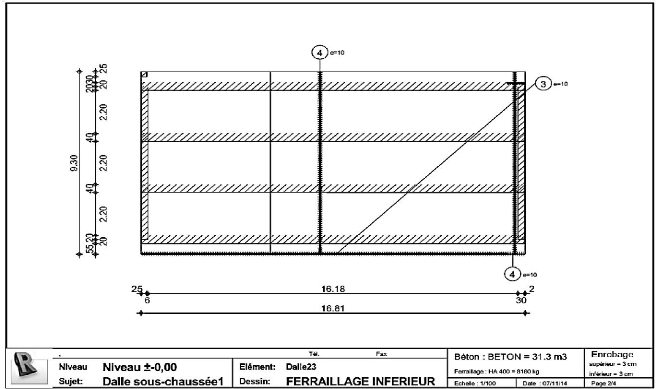
Figure 4.63 : Schéma de ferraillage dalle sous
chaussée (2/4)
141 /176
Chapitre 4
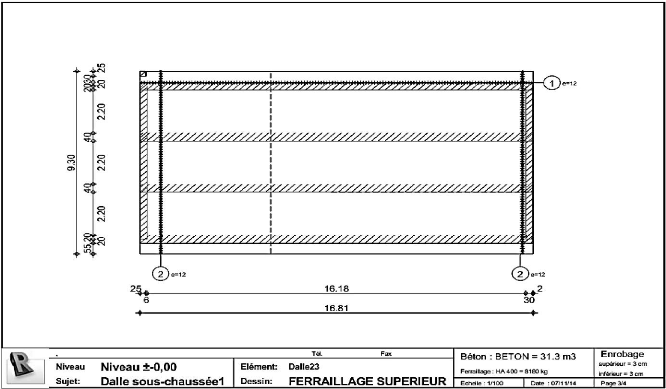
Figure 4.64 : Schéma de ferraillage dalle sous
chaussée (3/4)
142 /176
Chapitre 4
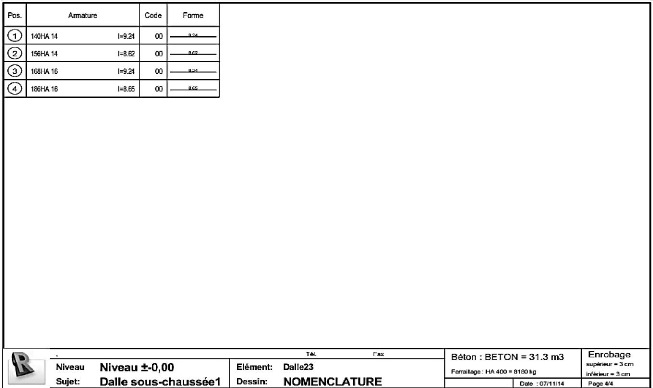
Figure 4.65 : Schéma de ferraillage dalle sous
chaussée (4/4)
143 /176
Chapitre 4
4.14.2. Poutres de rives
4.14.2.1. Plans d'exécutions Pages
suivantes
144 /176
Chapitre 4
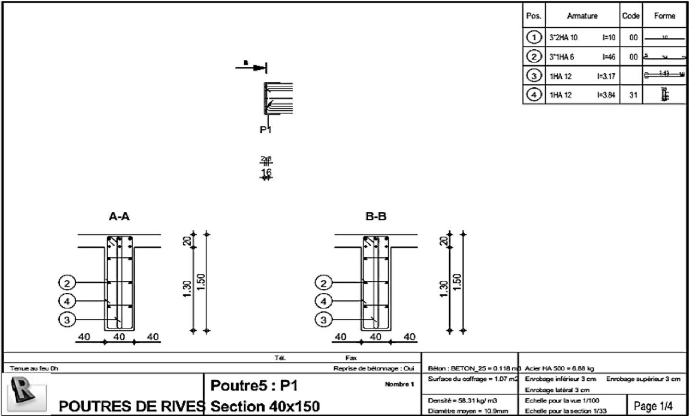
Figure 4.66 : Schéma de ferraillage poutres de rives
(1/4)
145 /176
Chapitre 4
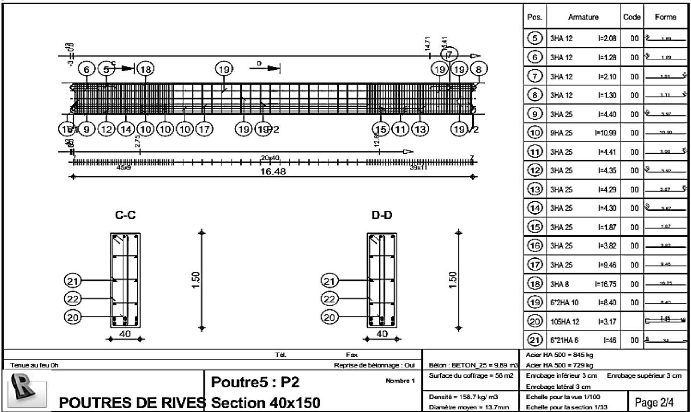
Figure 4.67 : Schéma de ferraillage poutres de rives
(2/4)
146 /176
Chapitre 4
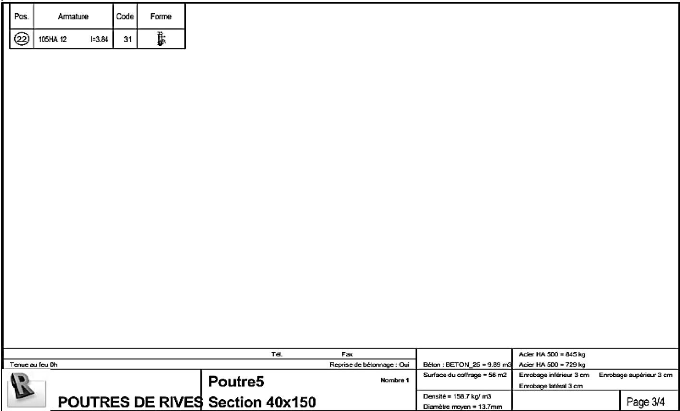
Figure 4.68 : Schéma de ferraillage poutres de rives
(3/4)
147 /176
Chapitre 4
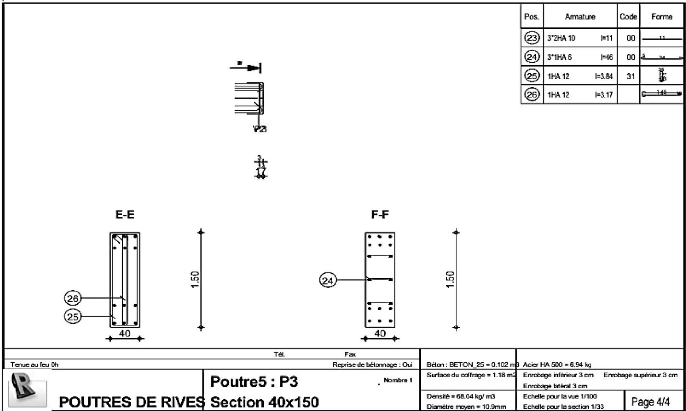
Figure 4.69 : Schéma de ferraillage poutres de rives
(4/4)
148 /176
Chapitre 4
4.14.3. Poutres intermédiaires 4.14.3.1. Plans
d'exécutions Pages suivantes
149 /176
Chapitre 4
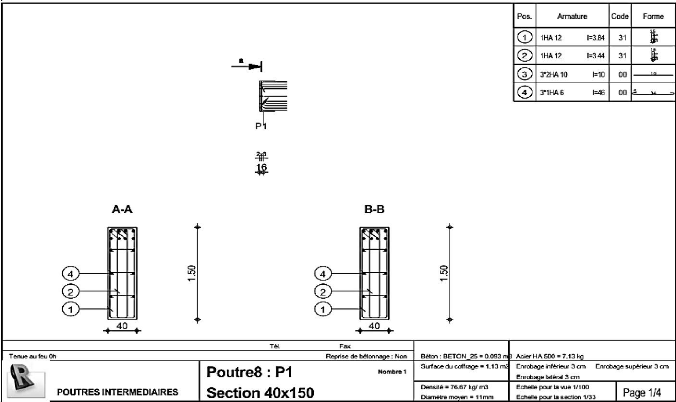
Figure 4.70 : Schéma de ferraillage poutres
intermédiaires (1/4)
150 /176
Chapitre 4
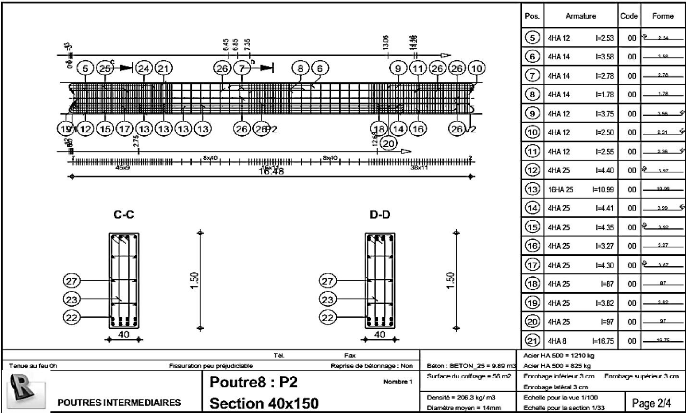
Figure 4.71 : Schéma de ferraillage poutres
intermédiaires (2/4)
151 /176
Chapitre 4
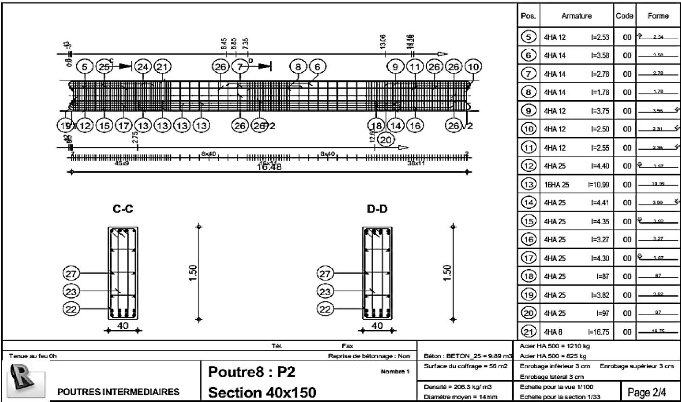
Figure 4.72 : Schéma de ferraillage poutres
intermédiaires (3/4)
152 /176
Chapitre 4
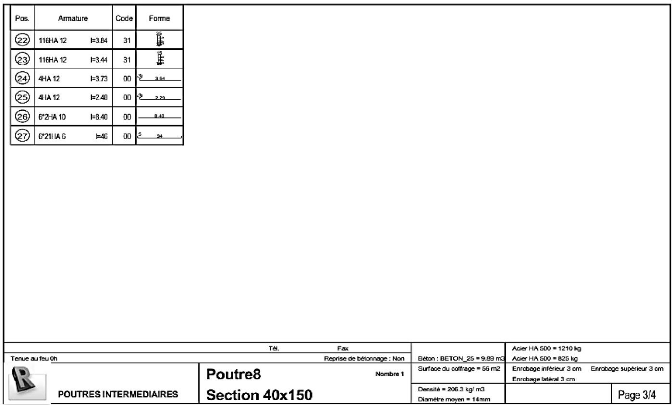
Figure 4.73 : Schéma de ferraillage poutres
intermédiaires (4/4)
153 /176
Chapitre 4
4.14.4. Entretoises
4.14.4.1. Plans d'exécutions Pages
suivantes
154 /176
Chapitre 4
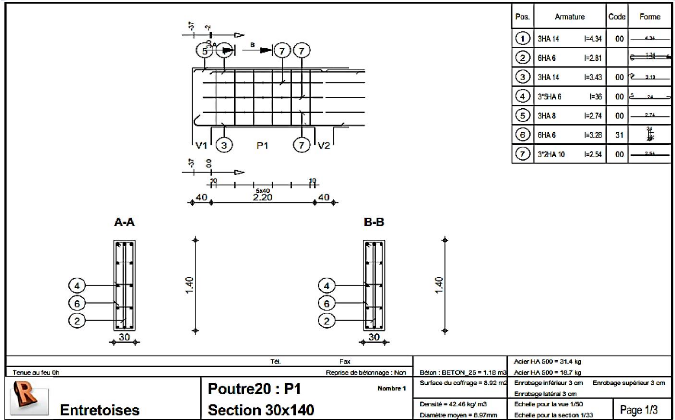
Figure 4.74 : Schéma de ferraillage entretoises (1/3)
155 /176
Chapitre 4
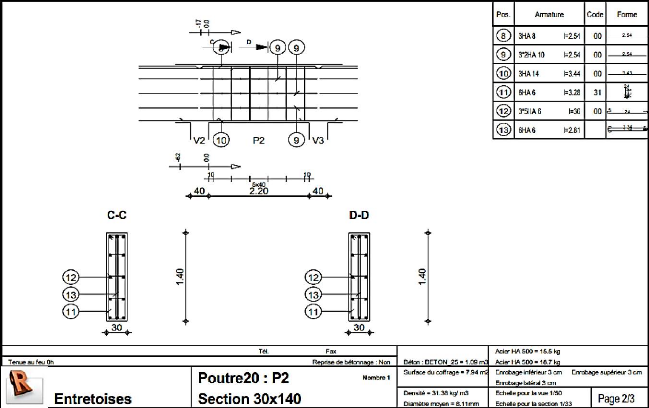
Figure 4.75 : Schéma de ferraillage entretoises (2/3)
156 /176
Chapitre 4
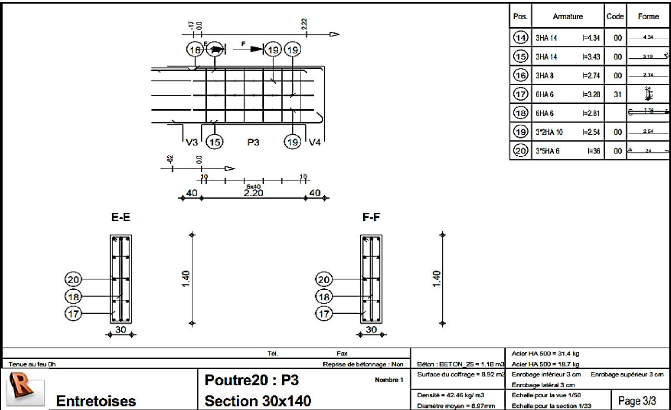
Figure 4.76 : Schéma de ferraillage entretoises (3/3)
157 /176
Conclusion et perspectives
Conclusion et perspectives
La modélisation par éléments finis est
une discipline relativement récente qui mêle étroitement
les mathématiques, la mécanique et l'analyse numérique.
La présente étude a permis, d'une part, de
cerner les bases mathématiques fondamentales sur lesquelles se fonde la
méthode des éléments finis et d'autre part de comprendre
le processus de mise en oeuvre de la méthode sur ordinateur à
travers l'utilisation du logiciel Autodesk Robot SAP 2012 pour les simulations
réalisées sur notre tablier de pont ; ainsi, tous les objectifs
assignés à cette étude ont été atteints.
Nous déduisons aussi, qu'un travail d'étude
efficace, sur la structure d'un ouvrage ne peut être conduit que par un
ingénieur expérimenté, possédant une solide culture
technique dans les domaines de la modélisation des structures, des
normes de conception et de calcul, des propriétés physiques et
mécaniques des matériaux utilisables dans des conditions
économiques acceptables et des méthodes d'exécutions.
Nous ambitionnons d'aborder ultérieurement d'autres
problèmes plus complexes dépassant le simple cadre de l'analyse
statique et qui ferait intervenir d'autres types d'analyses telles que :
l'analyse harmonique, l'analyse temporelle (linéaire et
non-linéaire) et l'analyse élasto-plastique des barres.
158 /176
Références bibliographiques
Références bibliographiques
[1] BATOZ, Jean-Louis., DHATT, Gouri. Modélisation
des structures
par éléments finis. Vol 2, Paris :
Hermès, 1995, 483 p.
[2] PARTON, V., PERLINE, P. Equations intégrales de
la théorie de
l'élasticité. Editions MIR-Moscou,
1983V.
[3] TRENOGUINE. Analyse fonctionnelle. Editions
MIR-Moscou,
1985.
[4] DHATT, Gouri., TOUZOT, Gilbert. Une présentation
de la
méthode des éléments finis. Paris : Edition
des Universités de Laval, 1986, 544 p. (ISBN 2.224-00700-0)
[5] CUILLIERE, Jean-Christophe. Introduction à la
méthode des
éléments finis À Cours et exercices
corrigés. Paris : Dunod, 2011. (ISBN 978-2-10-056438-5)
[6] OUDIN, Hervé. Introduction à la
méthode des éléments finis.
Nantes : Ecole
centrale de Nantes, Laboratoire Mécanique et Matériaux, division
Mécanique des structures, 65 p.
[7] DOMISSY, E. Formulation et évaluation
d'éléments finis volumiques modifiés pour l'analyse
linéaire et non linéaire des coques. France : UT
Compiègne, Thèse, 1997.
[8] WANG, Chu-Kia. Matrix methods of structural
analysis.
International Textbook Co. 2e edition, 1970.
(ISBN 0700222677)
[9] HUEBNER, Kenneth H., THORHTON, Earl A., BYROM, Ted G.
159 /176
Références bibliographiques
The finite element method. Third edition, 1995. 627
p.
[10] CHASKALOVIC, J. Méthode des
éléments finis pour les sciences de l'ingénieur.
Lavoisier, 2004. (ISBN 2-7430-0708-7)
[11] CRAVEUR, Jean-Charles. Modélisation des
éléments finis. 3ème édition. Paris : Dunod,
2008, 328 p. (ISBN 978-2-10-053983-3)
[12] GUIRANDE, Valdiodio Diouf. Modélisation par
éléments finis appliquée au calcul des ponts courbes.
Sénégal : Ecole Polytechnique de Thiès, Projet de fin
d'études, 2002, 119 p.
[13] POUYE Ibrahima. Modélisation par
éléments finis des poutres courbes. Sénégal :
Ecole polytechnique de Thiès, Projet de fin de formation, 2008-2009, 57
p.
[14] KEITA Boubacar. Modélisation par
éléments finis type P des ponts courbes.
Sénégal : Projet de fin d'études, Ecole Polytechnique de
Thiès, 2005.
[15] CIARLET, Patrick., LUNEVILLE, Eric. La
méthode des éléments finis : de la théorie à
la pratique : Tome 1. Concepts généraux, DUNOD.
[16] QUANG HUY, Nguyen. Modélisation du
comportement des poutres mixtes acier-béton. Ed Paf.
[17] ERN, Alexandre., GUERMOND, Jean-Luc.
Éléments Finis : Théorie, Applications, Mise en OEuvre
(Mathématiques et Applications 36). (French Edition)
160 /176
Références bibliographiques
[18] NOUY, Anthony. Méthodes
éléments finis stochastiques. Nantes : Institut de Recherche
en Génie Civil et Mécanique, Université de Nantes, Ecole
Centrale Nantes.
[19] CIARLET, Patrick., LUNEVILLE, Eric. La
méthode des éléments finis : de la théorie à
la pratique : Tome 1. Concepts généraux, DUNOD.
[20] P. Jean Frey., P-L. George, Maillages : Applications
aux
éléments finis. HERMES, Science Publications,
1999.
[21] GRUAU, Cyril. Thèse :
Génération de métriques pour l'adaptation anisotrope
de maillages, applications à la mise en forme des matériaux
». Mécanique numérique. Paris : Ecole des mines
supérieures des mines de paris, 2004.
[22] CALGARO, Jean-Armand. Projet et construction des
ponts. Paris : Presses de l'école nationale des ponts et
chaussées, 457 p. (ISBN 2-85978-327-X)
[23] MILLENIUM., R., Manuel d'utilisation ROBOT
Béton Armé. 2004. 18: p. 220.
[24] Anonyme.
http://fr.wikipedia.org/w/index.php?title=Méthode_des_él
éments_finis&oldid=101572723, consulté le 23 juillet 2014.
[25] Anonyme.
http://fr.wikibooks.org/w/index.php?title=Méthode_des_é
léments_finis/Présentation_générale&oldid=434214,
consulté le 23 juillet 2014.
[26] F. Hecht, O. Pironneau, J. Morice, A. Le Hyaric, and K.
Ohtsuka.
161 /176
Références bibliographiques
Freefem++.
http://www.freefem.org/ff++/index.htm,
consulté le 20 Août 2014.
162 /176
Table des matières
Table des matières
Certification i
Dédicaces ii
Remerciements iii
Résumé vii
Abstract viii
Sommaire ix
Liste des figures xii
Liste des tableaux xviii
Liste des symboles et abréviations xix
Avant-propos xxi
Introduction générale 1
Chapitre 1 : Méthodes d'approximations en
physiques 3
1.1. Modélisation et Simulation 4
1.1.1. Modélisation 4
1.1.2. Simulation 4
1.2. Classification des systèmes physiques
4
1.3. Processus d'analyse d'un problème physique
5
1.4. Méthodes d'approximations 7
1.5. Définition d'un problème de
l'élasticité linéaire 8
1.5.1. Equations fondamentales de la théorie de
l'élasticité 8
1.5.2. Les différentes méthodes de
résolution 11
1.6. Méthode de GALERKIN pour la résolution
des équations de Lamé 12
1.6.1. Modèle mathématique
étudié 12
1.6.2. Transformation du modèle
mathématique 12
163 /176
Table des matières
1.6.3. Résolution de l'équation de Poisson
par l'approche variationnelle
de GALERKIN 15
1.6.3.1. Méthode de GALERKIN 15
1.6.3.2. Application de la méthode de GALERKIN 15
1.6.3.3. Détermination du tenseur des déformations
22
1.6.3.4. Détermination du tenseur des contraintes 22
1.6.3.5. Simulation du tenseur des déformations 24
Chapitre 2 : Méthode des Eléments finis
28
2.1. Processus d'analyse par la méthode des
éléments finis 29
2.1.1. Analyse des problèmes physiques
modélisés par une équation 29
2.1.2. Principe des éléments finis en
calcul des structures 31
2.2. Discrétisation géométrique
(maillage) 32
2.2.1. Définition du maillage 32
2.2.2. Caractérisation d'un maillage
33
2.2.3. But et rôle du maillage 35
2.2.4. Règles de partition du domaine en
éléments 36
2.3. Approximation nodale 39
2.4. Approximation par éléments finis
41
2.4.1. Définitions 42
2.5. Définition de la géométrie des
éléments 43
2.5.1. Eléments de référence
43
2.5.2. Formes d'éléments de
référence classiques 47
2.6. Approximation sur un élément de
référence 49
2.6.1. Expression de la fonction approchée
( ) 49
2.6.2. Propriétés de la fonction
approchée ( ) 50
2.6.2.1. Propriété fondamentale de l'approximation
nodale 50
2.7. Construction des fonctions d'interpolations et de
transformations
géométriques 53
164 /176
Table des matières
2.7.1. Construction des fonctions N ( )
et Ni( ) 53
2.7.1.1. Méthode générale de construction
53
2.8. Matrice élémentaire 59
2.8.1. Matrice de rigidité
élémentaire 59
2.8.2. Matrice des forces équivalentes de volume
59
2.8.3. Matrice des forces équivalentes de surface
59
2.9. Assemblage et conditions aux limites 60
2.9.1. Définition de l'assemblage 60
2.9.2. Les règles et étapes de l'assemblage
60
Chapitre 3 : Etude de quelques exemples
d'éléments finis 62
3.1. Elément fini linéaire à deux
noeuds 63
3.1.1. Définition 63
3.1.2. Matrice de rigidité
élémentaire 63
3.1.2.1. Poutre en flexion simple 63
3.1.2.2. Poutre en flexion composée 64
3.2. Elément fini triangulaire plan à trois
noeuds 64
3.2.1. Définition 64
3.2.2. Matrice de rigidité
élémentaire 65
3.3. Elément fini tétraédrique
à quatre noeuds 66
3.3.1. Définition 66
3.3.2. Construction de la matrice des fonctions
d'interpolation 66
3.3.3. Calcul de la matrice jacobienne de la
transformation géométrique 68
3.3.4. Construction de la matrice de rigidité
élémentaire 74
3.3.5. Programme (matrice_k) de Calcul de la matrice de
rigidité
élémentaire pour un élément
tétraédrique à 4 noeuds 85
3.3.5.1. Structure du programme 85
3.3.5.2. Code source en FORTRAN 85
165 /176
Table des matières
3.3.5.3. Exemple de l'exécution du programme 88
Chapitre 4 : Modélisation et Simulation
numérique d'un tablier de pont 90
4.1. Matériels employés pour la simulation
91
4.1.1. Ordinateur 91
4.1.2. Logiciel Autodesk AutoCAD 2012 91
4.1.3. Logiciel Autodesk Robot SAP 2012 91
4.1.3.1. Description générale du logiciel Autodesk
Robot SAP 2012 91
4.2. Présentation générale de
l'ouvrage 92
4.3. Caractéristiques du Tablier 94
4.3.1. Les poutres 95
4.3.2. Les entretoises 95
4.3.3. La dalle sous chaussée 95
4.4. Définition des charges et actions
appliquées à la structure 99
4.4.1. Charges permanentes 99
4.4.2. Charges d'exploitations 100
4.4.2.1. Charges sur les trottoirs 100
4.4.2.2. Charges de chaussée 100
4.4.2.3. Système A 101
4.4.2.4. Système B 102
4.5. Définition du flux de travail 109
4.6. Définition de la structure 110
4.6.1. Création des lignes de construction dans
Autocad 110
4.6.2. Importation des lignes de construction dans Robot
SAP 110
4.6.3. Création de la géométrie
112
4.6.3.1. Définition des poutres et entretoises 112
4.6.3.2. Modélisation des dalles sous-chaussées
112
4.7. Construction du modèle éléments
finis (EF) 116
4.8. Introduction des conditions de fixations (Appuis)
118
166 /176
Table des matières
4.9. Choix des normes et règlements à
utiliser 119
4.10. Définitions des charges 120
4.10.1. Création des Cas de Charges
120
4.10.2. Définition des charges 121
4.10.2.1. Charges statiques 121
4.10.2.2. Charges roulantes 122
4.11. Lancement des calculs de la structure
128
4.12. Résultats de calcul 129
4.12.1. Panneaux 129
4.12.1.1. Cartographies des panneaux 129
4.12.1.2. Coupes sur panneaux 131
4.12.2. Barres 133
4.12.2.1. Analyse détaillés des barres 133
4.13. Définition des combinaisons d'actions
134
4.13.1. Création des composantes de cas charges
134
4.13.2. Génération des combinaisons
d'actions 135
4.14. Exploitation des résultats 136
4.14.1. Dalle sous chaussée 136
4.14.1.1. Cartographies et plans d'exécution 136
4.14.2. Poutres de rives 143
4.14.2.1. Plans d'exécutions 143
4.14.3. Poutres intermédiaires 148
4.14.3.1. Plans d'exécutions 148
4.14.4. Entretoises 153
4.14.4.1. Plans d'exécutions 153
Conclusion et perspectives 157
Références bibliographiques 158
Table des matières 162
Annexes 167
Annexes
Annexes
Annexe : Note de calcul Dalle sous-chaussée Dalle
: Dalle23 - panneau n° 23
A.1. Ferraillage :
Type : Tablier
Direction armatures principales : 90°
Classe armatures principales : HA 400; résistance
caractéristique = 400,00 MPa
Diamètres des barres inférieures d1 = 1,6 (cm) d2
= 1,6 (cm)
supérieures d1 = 1,4 (cm) d2 = 1,4 (cm)
Enrobage inférieur c1 = 3,0 (cm)
supérieur c2 = 3,0 (cm)
A.2. Béton
Classe : BETON; résistance caractéristique = 25,00
MPa
Densité : 2549,29 (kG/m3)
A.3. Hypothèses
Calculs suivants : BAEL 91 mod. 99
Méthode de calcul de la section d'acier : Analytique
Fissuration
- lit supérieur : préjudiciable
- lit inférieur : préjudiciable
Flèche admissible : 3,0 (cm)
Vérification du poinçonnement : oui
Type de calcul : flexion
A.4. Géométrie de la dalle
Epaisseur 0,20 (m)
Contour :
bord début fin longueur
x1
|
1
|
0,00
|
-9,30
|
|
2
|
16,81
|
-9,30
|
|
3
|
16,81
|
0,00
|
|
4
|
0,00
|
0,00
|
Appui :
n° Nom dimensions
5 linéaire 0,40 / 16,81
11 linéaire 0,40 / 16,81
17 linéaire 0,40 / 16,81
23 linéaire 0,40 / 16,81
33 linéaire 7,80 / 0,30
35 linéaire 7,80 / 0,30
|
coordonnées (m)
|
bord
x y
|
|
8,40
|
-0,75 --
|
|
8,40
|
-3,35 --
|
|
8,40
|
-5,95 --
|
|
8,40
|
-8,55 --
|
|
0,16
|
-4,65 --
|
|
16,64
|
-4,65 --
|
167 /176
y1
|
x2
|
y2 (m)
|
|
16,81
|
-9,30
|
16,81
|
|
16,81
|
0,00
|
9,30
|
|
0,00
|
0,00
|
16,81
|
|
0,00
|
-9,30
|
9,30
|
168 /176
Annexes
0 linéaire 0,50 / 0,50 0,00 0,00 --
A.5. Résultats des calculs :
A.5.1. Moments maximaux + ferraillage pour la flexion
Ax(+) Ax(-) Ay(+) Ay(-)
|
Ferraillage réel (cm2/m): 0,00
|
0,00
|
0,00
|
0,00
|
|
Ferraillage théorique modifié (cm2/m): 8,04
|
8,04
|
4,52
|
4,52
|
|
Ferraillage théorique primaire (cm2/m): 0,00
|
0,00
|
0,00
|
0,00
|
A.5.2. Moments maximaux + ferraillage pour la
flexion
Ax(+) Ax(-) Ay(+) Ay(-)
Symboles :
section théorique/section réelle
|
Ax(+) (cm2/m)
|
8,04/0,00
|
8,04/0,00
|
8,04/0,00
|
8,04/0,00
|
|
Ax(-) (cm2/m)
|
8,04/0,00
|
8,04/0,00
|
8,04/0,00
|
8,04/0,00
|
|
Ay(+) (cm2/m)
|
4,52/0,00
|
4,52/0,00
|
4,52/0,00
|
4,52/0,00
|
|
Ay(-) (cm2/m)
|
4,52/0,00
|
4,52/0,00
|
4,52/0,00
|
4,52/0,00
|
A.5.3. Poinçonnement
Appui N°/ Point Position (m) Géométrie
: (m)
x y a b
P1 0,00 0,00 force 0,50 0,50
Appui N°/ Point Chargements : (kN)
Périmètre critique (m)
Q Qadm u Qadm / Q
P1 400,00 100,0 3,38 4,00 > 1
A.5.4. Flèche
|f(+)| = 0,1 (cm) <= fdop(+) = 3,0 (cm) |f(-)| = 1,9 (cm)
<= fdop(-) = 3,0 (cm)
A.7 Chargements :
Cas Type Liste Valeur
1 poids propre 3A23 PZ Moins
6 (EF) linéaire sur les bords FZ= Aucun [kN]
6 (EF) linéaire 2p (3D) FZ1=-0,50[kN/m] FZ2= -
0,50[kN/m] N1X=0,03[m] N1Y=9,20[m] N1Z=0,0[m] N2X=16,84[m]
N2Y=9,20[m]
N2Z=0,0[m]
6 (EF) linéaire 2p (3D) FZ1=-0,50[kN/m] FZ2= -
0,50[kN/m] N1X=16,86[m] N1Y=9,20[m] N1Z=0,0[m] N2X=33,13[m]
N2Y=9,20[m]
N2Z=0,0[m]
169 /176
Annexes
6 (EF) linéaire 2p (3D) FZ1=-0,50[kN/m] FZ2=-
0,50[kN/m] N1X=33,16[m] N1Y=9,20[m] N1Z=0,0[m] N2X=49,97[m]
N2Y=9,20[m]
N2Z=0,0[m]
6 (EF) linéaire 2p (3D) FZ1=-0,50[kN/m] FZ2=-
0,50[kN/m] N1X=0,03[m] N1Y=0,10[m] N1Z=0,0[m] N2X=16,84[m]
N2Y=0,10[m]
N2Z=0,0[m]
6 (EF) linéaire 2p (3D) FZ1=-0,50[kN/m] FZ2=-
0,50[kN/m] N1X=16,86[m] N1Y=0,10[m] N1Z=0,0[m] N2X=33,13[m]
N2Y=0,10[m]
N2Z=0,0[m]
6 (EF) linéaire 2p (3D) FZ1=-0,50[kN/m] FZ2=-
0,50[kN/m] N1X=33,16[m] N1Y=0,10[m] N1Z=0,0[m] N2X=49,97[m]
N2Y=0,10[m]
N2Z=0,0[m]
|
5 P1(0.03, 5 P1(16.9, 5 P1(33.2,
|
(EF) surfacique 3p (contour) 21
8.15, 0) P2(0.03, 1.15, 0) P3(16.8, 1.15, 0) P4(16.8, 8.15, 0)
(EF) surfacique 3p (contour) 22
8.15, 0) P2(16.9, 1.15, 0) P3(33.1, 1.15, 0) P4(33.1, 8.15, 0)
(EF) surfacique 3p (contour) 23
8.15, 0) P2(33.2, 1.15, 0) P3(50, 1.15, 0) P4(50, 8.15, 0)
|
PZ1=-14,94[kN/m2]
PZ1=-15,18[kN/m2]
PZ1=-14,94[kN/m2]
|
|
3
|
(EF) surfacique 3p (contour)
|
|
22
|
PZ1=-1,50[kN/m2]
|
|
P1(16.8,
|
9.3, 0) P2(16.8, 8.15, 0) P3(0.03, 8.15, 0) P4(0.03,
|
9.3,
|
0)
|
|
|
3
|
(EF) surfacique 3p (contour)
|
|
22
|
PZ1=-1,50[kN/m2]
|
|
P1(0.03,
|
1.15, 0) P2(0.03, 0, 0) P3(16.8, 0, 0) P4(16.8, 1.15,
|
0)
|
|
|
|
3
|
(EF) surfacique 3p (contour)
|
|
23
|
PZ1=-1,50[kN/m2]
|
|
P1(16.9,
|
9.3, 0) P2(16.9, 8.15, 0) P3(33.1, 8.15, 0) P4(33.1,
|
9.3,
|
0)
|
|
|
3
|
(EF) surfacique 3p (contour)
|
|
23
|
PZ1=-1,50[kN/m2]
|
|
P1(16.9,
|
1.15, 0) P2(16.9, 0, 0) P3(33.1, 0, 0) P4(33.1, 1.15,
|
0)
|
|
|
|
3
|
(EF) surfacique 3p (contour)
|
|
|
PZ1=-1,50[kN/m2]
|
|
P1(33.2,
|
1.15, 0) P2(33.2, 0, 0) P3(50, 0, 0) P4(50, 1.15, 0)
|
|
|
|
|
3
|
(EF) surfacique 3p (contour)
|
|
|
PZ1=-1,50[kN/m2]
|
|
P1(33.2,
|
9.3, 0) P2(33.2, 8.15, 0) P3(50, 8.15, 0) P4(50, 9.3,
|
0)
|
|
|
|
7
|
(EF) surfacique 3p (contour)
|
|
21
|
PZ1=-7,75[kN/m2]
|
|
P1(0.03,
|
9.3, 0) P2(0.03, 8.15, 0) P3(16.8, 8.15, 0) P4(16.8,
|
9.3,
|
0)
|
|
|
7
|
(EF) surfacique 3p (contour)
|
|
22
|
PZ1=-7,75[kN/m2]
|
|
P1(16.9,
|
9.3, 0) P2(16.9, 8.15, 0) P3(33.1, 8.15, 0) P4(33.1,
|
9.3,
|
0)
|
|
|
7
|
(EF) surfacique 3p (contour)
|
|
23
|
PZ1=-7,75[kN/m2]
|
|
P1(33.2,
|
9.3, 0) P2(33.2, 8.15, 0) P3(50, 8.15, 0) P4(50, 9.3,
|
0)
|
|
|
|
7
|
(EF) surfacique 3p (contour)
|
|
23
|
PZ1=-7,75[kN/m2]
|
|
P1(33.2,
|
1.15, 0) P2(33.2, 0, 0) P3(50, 0, 0) P4(50, 1.15, 0)
|
|
|
|
|
7
|
(EF) surfacique 3p (contour)
|
|
22
|
PZ1=-7,75[kN/m2]
|
|
P1(16.9,
|
1.15, 0) P2(33.1, 1.15, 0) P3(33.1, 0, 0) P4(16.9, 0,
|
0)
|
|
|
170 /176
Annexes
7 (EF) surfacique 3p (contour) 21 PZ1=-7,75[kN/m2]
P1(0.03, 1.15, 0) P2(16.8, 1.15, 0) P3(16.8, 0, 0) P4(0.03, 0,
0)
8 (EF) surfacique 3p (contour) 21 PZ1=-2,72[kN/m2]
P1(0.03, 8.15, 0) P2(16.8, 8.15, 0) P3(16.8, 1.15, 0) P4(0.03,
1.15, 0)
8 (EF) surfacique 3p (contour) 22 PZ1=-2,72[kN/m2]
P1(16.9, 8.15, 0) P2(33.1, 8.15, 0) P3(33.1, 1.15, 0) P4(16.9,
1.15, 0)
8 (EF) surfacique 3p (contour) 23 PZ1=-2,72[kN/m2]
P1(33.2, 8.15, 0) P2(33.2, 1.15, 0) P3(50, 1.15, 0) P4(50,
8.15, 0)
27 (EF) force dans le point FZ=-84,84[kN]
X=13,03[m]
Y=4,40[m]
27 (EF) force dans le point FZ=-84,84[kN]
X=13,03[m]
Y=4,90[m]
27 (EF) force dans le point FZ=-84,84[kN]
X=13,03[m]
Y=2,40[m]
27 (EF) force dans le point FZ=-84,84[kN]
X=13,03[m]
Y=6,90[m]
27 (EF) force dans le point FZ=-84,84[kN]
X=14,53[m]
Y=4,40[m]
27 (EF) force dans le point FZ=-84,84[kN]
X=14,53[m]
Y=4,90[m]
27 (EF) force dans le point FZ=-84,84[kN]
X=14,53[m]
Y=2,40[m]
27 (EF) force dans le point FZ=-84,84[kN]
X=14,53[m]
Y=6,90[m]
27 (EF) force dans le point FZ=-42,42[kN]
X=19,03[m]
Y=4,40[m]
27 (EF) force dans le point FZ=-42,42[kN]
X=19,03[m]
Y=4,90[m]
27 (EF) force dans le point FZ=-42,42[kN]
X=19,03[m]
Y=2,40[m]
27 (EF) force dans le point FZ=-42,42[kN]
X=19,03[m]
Y=6,90[m]
27 (EF) force dans le point FZ=-84,84[kN]
X=23,53[m]
Y=4,40[m]
27 (EF) force dans le point FZ=-84,84[kN]
X=23,53[m]
Y=4,90[m]
27 (EF) force dans le point FZ=-84,84[kN]
X=23,53[m]
Y=2,40[m]
27 (EF) force dans le point FZ=-84,84[kN]
X=23,53[m]
Y=6,90[m]
171 /176
Annexes
|
|
|
|
|
27
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=25,03[m]
|
Y=4,40[m]
|
|
|
|
27
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=25,03[m]
|
Y=4,90[m]
|
|
|
|
27
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=25,03[m]
|
Y=2,40[m]
|
|
|
|
27
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=25,03[m]
|
Y=6,90[m]
|
|
|
|
27
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=29,53[m]
|
Y=4,40[m]
|
|
|
|
27
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=29,53[m]
|
Y=4,90[m]
|
|
|
|
27
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=29,53[m]
|
Y=2,40[m]
|
|
|
|
27
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=29,53[m]
|
Y=6,90[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=30,03[m]
|
Y=4,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=30,03[m]
|
Y=4,90[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=30,03[m]
|
Y=2,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=30,03[m]
|
Y=6,90[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=31,53[m]
|
Y=4,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=31,53[m]
|
Y=4,90[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=31,53[m]
|
Y=2,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=31,53[m]
|
Y=6,90[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=36,03[m]
|
Y=4,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=36,03[m]
|
Y=4,90[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=36,03[m]
|
Y=2,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=36,03[m]
|
Y=6,90[m]
|
|
|
172 /176
Annexes
|
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=40,53[m]
|
Y=4,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=40,53[m]
|
Y=4,90[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=40,53[m]
|
Y=2,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=40,53[m]
|
Y=6,90[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=42,03[m]
|
Y=4,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=42,03[m]
|
Y=4,90[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=42,03[m]
|
Y=2,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=42,03[m]
|
Y=6,90[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=46,53[m]
|
Y=4,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=46,53[m]
|
Y=4,90[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=46,53[m]
|
Y=2,40[m]
|
|
|
|
28
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=46,53[m]
|
Y=6,90[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=30,03[m]
|
Y=4,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=30,03[m]
|
Y=4,90[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=30,03[m]
|
Y=2,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=30,03[m]
|
Y=6,90[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=31,53[m]
|
Y=4,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=31,53[m]
|
Y=4,90[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=31,53[m]
|
Y=2,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=31,53[m]
|
Y=6,90[m]
|
|
|
173 /176
Annexes
|
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=36,03[m]
|
Y=4,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=36,03[m]
|
Y=4,90[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=36,03[m]
|
Y=2,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=36,03[m]
|
Y=6,90[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=40,53[m]
|
Y=4,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=40,53[m]
|
Y=4,90[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=40,53[m]
|
Y=2,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=40,53[m]
|
Y=6,90[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=42,03[m]
|
Y=4,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=42,03[m]
|
Y=4,90[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=42,03[m]
|
Y=2,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=42,03[m]
|
Y=6,90[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=46,53[m]
|
Y=4,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=46,53[m]
|
Y=4,90[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=46,53[m]
|
Y=2,40[m]
|
|
|
|
29
|
|
(EF) force dans le point
|
FZ=-42,42[kN]
|
|
X=46,53[m]
|
Y=6,90[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=30,03[m]
|
Y=5,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=30,03[m]
|
Y=5,90[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=30,03[m]
|
Y=3,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=30,03[m]
|
Y=7,90[m]
|
|
|
174 /176
Annexes
|
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=31,53[m]
|
Y=5,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=31,53[m]
|
Y=5,90[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=31,53[m]
|
Y=3,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=31,53[m]
|
Y=7,90[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-37,41[kN]
|
|
X=36,03[m]
|
Y=5,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-37,41[kN]
|
|
X=36,03[m]
|
Y=5,90[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-37,41[kN]
|
|
X=36,03[m]
|
Y=3,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-37,41[kN]
|
|
X=36,03[m]
|
Y=7,90[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=40,53[m]
|
Y=5,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=40,53[m]
|
Y=5,90[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=40,53[m]
|
Y=3,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=40,53[m]
|
Y=7,90[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=42,03[m]
|
Y=5,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=42,03[m]
|
Y=5,90[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=42,03[m]
|
Y=3,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-74,82[kN]
|
|
X=42,03[m]
|
Y=7,90[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-37,41[kN]
|
|
X=46,53[m]
|
Y=5,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-37,41[kN]
|
|
X=46,53[m]
|
Y=5,90[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-37,41[kN]
|
|
X=46,53[m]
|
Y=3,40[m]
|
|
|
|
32
|
|
(EF) force dans le point
|
FZ=-37,41[kN]
|
|
X=46,53[m]
|
Y=7,90[m]
|
|
|
175 /176
Annexes
|
|
|
|
|
33
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=48,03[m]
|
Y=4,40[m]
|
|
|
|
33
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=48,03[m]
|
Y=4,90[m]
|
|
|
|
33
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=48,03[m]
|
Y=2,40[m]
|
|
|
|
33
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=48,03[m]
|
Y=6,90[m]
|
|
|
|
33
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=49,53[m]
|
Y=4,40[m]
|
|
|
|
33
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=49,53[m]
|
Y=4,90[m]
|
|
|
|
33
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=49,53[m]
|
Y=2,40[m]
|
|
|
|
33
|
|
(EF) force dans le point
|
FZ=-84,84[kN]
|
|
X=49,53[m]
|
Y=6,90[m]
|
|
|
Combinaison / Composante Définition
ELU/34 (1+6+7+8)*1.35+3*1.50+28*1.61
ELS/37 (1+3+6+7+8)*1.00+28*1.20
A.8 Résultats théoriques - disposition des
armatures
Liste de solutions : Ferraillage par barres
Solution n° Armatures Poids total
Diamètre / Poids (kG)
|
1
Résultats pour la solution n° 1
|
|
-
|
|
8083,86
|
|
Zones de ferraillage
|
|
|
|
|
|
|
|
Ferraillage inférieur
|
|
|
|
|
|
|
|
Nom
|
coordonnées
|
|
|
Armatures adoptées
|
At Ar
|
|
x1
|
y1
|
x2
|
y2
|
? [mm] / [cm]
|
[cm2/m] [cm2/m]
|
|
1/5- Ax Principal
|
16,81
|
-9,30
|
0,00
|
-0,00
|
16,0 / 10,0
|
19,42 < 20,11
|
|
1/9- Ay Perpendiculaire
|
16,81
|
-9,30
|
0,00
|
-0,00
|
16,0 / 10,0
|
18,47 < 20,11
|
176 /176
Annexes
|
Ferraillage supérieur
|
|
|
|
|
|
|
Nom
|
coordonnées
|
|
Armatures adoptées
|
At Ar
|
|
x1 y1
|
x2
|
y2
|
? [mm] / [cm]
|
[cm2/m] [cm2/m]
|
|
1/1+ Ax Principal
|
16,81 -9,30
|
0,00
|
-0,00
|
14,0 / 12,0
|
8,04 <12,83
|
|
1/2+ Ay Perpendiculaire
|
16,81 -9,30
|
0,00
|
-0,00
|
14,0 / 12,0
|
4,52 <12,83
|
4. Quantitatif
· Volume de Béton = 31,26 (m3)
· Surface de Coffrage = 156,29 (m2)
· Périmètre de la dalle = 52,21 (m)
· Superficie des réservations = 0,00 (m2)
· Acier HA 400
· Poids total = 8180,71 (kG)
· Densité = 261,72 (kG/m3)
· Diamètre moyen = 15,1 (mm)
· Liste par diamètres :
Diamètre Longueur Poids
(m) (kG)
14 2637,93 3188,80
16 3161,69 4991,91
| 

