3.2 Examen du mode actuel d'organisation de
l'espace
3.2.1 Diagnostic d'organisation actuelle de l'espace
exondé
Le diagnostic s'est fait sous la base d'interprétation
des images satellites Quick bird de Très Haute
Résolution (THR) obtenues dans le laboratoire de géomatique de la
Mission d'Etude pour l'Aménagement et le Développement de la
Province du Nord (MEADEN). Cette analyse a été
complétée par plusieurs visites de terrain supportées par
des entretiens ouverts avec les paysans. La méthode d'analyse que nous
avons utilisée est l'étude de la morphologie agraire sous la base
des éléments caractéristiques suivants :
- le type d'habitat rencontré,
- les formes et les dimensions des parcelles
- les reliefs crées par l'homme et
- la densité des pistes d'exploitations.
Ces éléments ont été ensuite
discutés en rapport à la gestion des ressources naturelles et de
l'espace en général. La morphologie agraire étant le
paysage issu des activités agricoles des populations, nous a permis de
comprendre les différentes occupations de l'espace par les
activités paysannes. Afin de visualiser les descriptions et les
discussions faites à cet effet, nous avons réalisé une
carte du parcellaire du village sous la base des images THR et des levés
au GPS de certains espaces. Le logiciel MapInfo professional (version 8.5) et
MapSource ont été intensément utilisés pour
l'ensemble de ce

diagnostic agraire. En fin, les logiques d'organisation de
l'espace agropastoral ont été déduites pour mettre en
évidence les caractéristiques de l'espace exondé.
3.2.2 Diagnostic d'organisation actuelle du bas fond
Pour le bas fond, trois méthodes ont été
mises à contribution. Il s'agit de sa caractérisation physique,
de son fonctionnement hydrologique et de son plan parcellaire agricole. Une
analyse des données par système d'information géographique
(SIG) a été faite pour l'illustration de certains
résultats.
i. Caractérisation physique du bas
fond
Dans cette méthode, nous nous sommes basés aux
caractéristiques géométriques, hydrographiques,
agrologiques et topographiques du bas fond. Ces caractéristiques
conduisent à la connaissance du potentiel naturel du bas fond et
prédisent sur son complexe hydrologique.
Pour des données géométriques
(disposition dans le plan), la surface et la forme du bas fond ont
été déterminées à partir des
paramètres de distance (longueur, largeur) et du
périmètre. Sous la base de la méthode
d'interprétation d'image assistée par Ordinateur avec le logiciel
MapInfo (version 8.5), la longueur et la largeur du bas fond ont
été déterminé numériquement. Le
périmètre (P) ou encore périmètre équivalent
et la surface du bas fond (A) ont été estimé par la
même technique d'analyse. Cependant, la forme est estimée à
partir de l'indice morphologique de compacité de Gravilus KG qui est le
rapport du périmètre du bassin au périmètre du
cercle ayant la même surface (Laborde, 2000). On le calcul par :
KG = P/2·vðA ; soit KG = 0.28*P/vA ;
P = 2*(L+l) avec P, L et l en km
Les caractéristiques hydrographiques du bas fond ont
été trouvées à partir de deux facteurs que sont la
hiérarchisation du réseau hydrographique et son degré de
développement. L'analyse des images assistée par ordinateur est
à la base de ce travail. La hiérarchisation du réseau a
été obtenue suivant la classification des cours d'eau du

réseau proposée par STRAHLER. Cette classification
affecte un numéro au cours d'eau pour signifier son importance. Ainsi,
le principe suivant a été respecté :
- tout cours d'eau n'ayant pas d'affluent est dit d'ordre 1,
- au confluent de deux cours d'eau de même ordre n, le
cours d'eau résultant est d'ordre n + 1,
- un cours d'eau recevant un affluent d'ordre inférieur
garde son ordre. Ce qui se résume par : n + n = n + 1 et n + m = max (n,
m).
Nous avons déterminé le degré du
développement du réseau à partir des paramètres
suivants : la densité de drainage Dd et la densité hydrographique
F. Pour cela, un contage systématique et la mesure des longueurs des
cours d'eaux ont été effectuée à partir des images
satellites. Les formules utilisées pour le calcul sont les suivantes
:
Dd = ?li/A ; F= ?Ni/A,
- li : la longueur du cours d'eau (Km), A : la surface du bas
fond (km2), Ni : le nombre de cours d'eau.
- Dd (km-1) et F (km-2).
Pour ce qui est de l'agrologie du bas fond, nous nous sommes
limités aux données secondaires. Les sources consultées
concernent les rapports de stages et d'activité, les thèses et
les articles.
Les caractéristiques topographiques du bas fond ont
fait l'objet de réalisation d'une carte topographique. C'est une
représentation sur un plan horizontal d'une portion plus ou moins grande
de la surface de la terre à partir des données obtenues à
l'aide des opérations (levés) topographiques. Elle a servi comme
les autres aspects du diagnostic, d'outil d'aide au choix du type
d'aménagement hydro agricole approprié pour la valorisation du
bas fond afin de réduire la pression humaine sur l'espace exondé.
L'implantation des courbes de niveau, principale activité de cette
partie, a consisté en un levé topographique des points de
même altitude sur le sol du bas fond. Deux méthodes sont
généralement utilisées pour cette implantation à
savoir : la méthode directe et la méthode indirecte. La
première, nettement plus lente mais plus précise consiste
à déterminer et à marquer la ligne que suit chaque courbe
sur le sol et à procéder au levé planimétrique de
ces lignes afin de les représenter sur une carte. La méthode
indirecte, utilisée dans cette étude, fait un levé
topographique du terrain pour déterminer une série de points de
hauteur connue, qu'on reporte ensuite sur une carte et
détermine le s
é tude, les po qui a
permis p artir desqu e
après cette fois par les
courbes de niveau d' ints
ont ét é levés à la de faire
leur report dans un SIG ls un modè
le numérique de terrai
carte (figure 3.3).
Cependant, dans notre mesures
altimétrique s et par le
GPS. Ce pour déterminer les c
ourbes de niveaux à a
été réalis é.
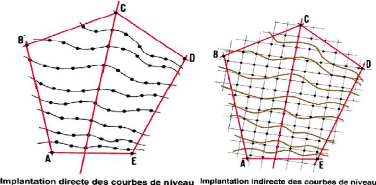
Figure 3.3
S ource: FAO,
2003
: Méthodes d'implan tation des courbes de n
iveau

La procédure de
mesure s altimétri ques que nous avo
ns utilisée est un c
heminement par rayonnement
dont le principe général selon
la FAO c onsiste à
déterminer l es altitudes de
plusieurs points à partir d'un
repère to pographiqu e unique.
En effet, tout d'abord on
détermine la hauteur HI de
l'instrument placé à la
station de nivellement
zéro. On vise ensuite en
direction d'un point X de
hauteur connue H(X) qu'on
relève une lectur e de visée
arrière (Var) et calcule alors HI par
:
HI = Va r + H(X)
Pour déterminer la hauteur de
chacun des points A, B, C et D par exemple (
figure 3.4), on vise su ccessiveme
nt chacun d'eux en
effectuant une visée avant (Vav). L
eurs hauteurs respectives se
calculent par:
H(point) = HI - Vav
NB : toutes l es variables ont pour unité
le mètre (m)
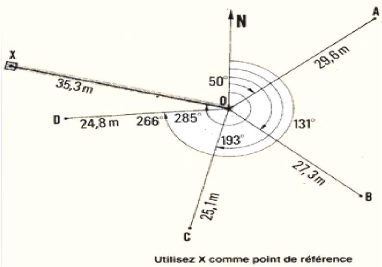

Source: FAO,
2003
Figure 3.4: Principe de nivellement par
rayonnement
Mais sur le terrain, à tout point de
stationnement choisis, nous
mesurons par un ruban mètre
flexible (mètre de taill
eurs) la hauteur de
l'appareil ou du tourillon (HI) qui est
fixée à 1, 5m du sol (HI= 1,5
m). En l'absence d'un repère
topographique de hauteur c
onnue à la première
station, aucune visée
arrière n'a été
effectuée. Elle est c onsidérée
c omme égal e à la
hauteur de l'in strument
(HI). Toute dénivelée, par
rapport à une station est calculée par :
H(point) = HI+ Vav ; ou H(p oint) = 1,5 + Vav
unique c'est a l'avantage
mètre (e = 1 rapport
à la
Par cette approche, Vav est
toujours affectée du signe
négatif, car le sens de levé est à dire
de l' a l'aval de s orte que la
dénivelée s oit
négative. Ce qui
mont vers
de tenir c ompte de la réalité
du terrain. Avec une
équidistance fixée à un
m), au niveau de chaque
station, les points situés à
2,5 m et 3 ,5 m par station so
nt recherc hés. L'app
areil utilisé à cet effe t est
un niveau de
'un trépie d. Ainsi no
us réaliso ns deux
courbes de
c hantier de marque
Kern muni d
,5 m) par station (figure
3.5).
niveau (courbes de 2,5
et celles de 3

A chaque point et station de nivellement utilisé, nous
marquons et relevons les coordonnées GPS correspondantes dans un bloc
note, avant de les enregistrer dans l'appareil GPS utilisé de marque
GARMIN 12. Ce double levé (topographique et GPS) a été
effectué sur toute l'étendue du bas fond. En fonction de la
nature du terrain (présence d'obstacle), le sens des courbes et le
nombre des points à lever varient d'une station à l'autre.
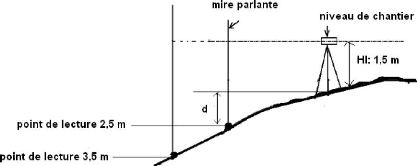
Source : Auteur
Figure 3.5 : Principe de recherche des points de
visée sur le terrain
Pour faciliter l'orientation de nos courbes et contourner
certaines contraintes du terrain, une image satellite Quick bird du
bas fond, imprimée à l'échelle de 1/50, a
été utilisée. Quelques astuces sur le terrain ont
été également développées parmi lesquelles :
- les levés par « côté » qui consiste, à
lever la moitié d'une surface donnée en réalisant de
demi-courbes puis à les compléter du côté
restant.
- la recherche du point zéro, où l'on cherche
à lire un point de même altitude que le HI, de
dénivelée nulle (d = 0), pour s'éloigner d'un obstacle sur
la ligne de visée et placer la nouvelle station. Pour cela,
l'observation globale du terrain permet de voir si la visibilité de
l'appareil sera bonne ou non. Le recours à l'image satellite Qick
bird nous a permis de vérifier à chaque fois les limites du
bas fond et d'orienter nos mouvements.
C'est par cette démarche que nous avons pu collecter
les données topographiques et géographiques pour passer au calcul
de dénivelée et l'établissement final de la carte
topographique. Par rapport aux statons individuelles, ce calcul a était
fait au même moment que les levés. Mais pour la
dénivelée de chaque point par rapport à la station de
référence, SN1, nous avons utilisé le logiciel Microsoft
Excel (2003).

Dans un tableau, chaque point de lecture a été
référé d'abord à sa station d'origine ensuite
à la station de référence SN1 à l'aide de son
numéro de relevé GPS (way point) et de son niveau d'altitude (2,5
ou 3,5m). Par exemple : si SN2 est à -2m par rapport à SN1 et que
le way point 005 est à -1m de SN2, alors 005 sera à -1 + (-2) =
-3 m
C'est par cette approche que la position de tous les points a
été déterminée par rapport à la station de
référence. Dans le même sens, pour le calcul des pentes du
terrain, une échelle de 1/1300 a été utilisée.
Cette dernière est acquise en reportant la longueur totale
présentée sur la carte topographique à celle du bas fond
obtenu lors de l'analyse des images satellites. La formule utilisée pour
la pente (p) entre deux point A et B est la suivante :
PA-B = 100x (DHA-B/dA-B),
DHA-B la dénivelée (m) ; dA-B la
distance (m) entre A et B et PA-B (m).
Pour l'établissement final de la carte topographique ou
carte des courbes de niveau, les données de levés topographiques
ont été utilisées comme base. Dans un premier temps, elles
ont été organisées dans Excel, après calcul de
dénivelée, pour ressortir trois paramètres essentiels que
sont : la longitude (X), la latitude (Y) et la dénivelée (Z).
Ensuite, cette base numérisée est transférée dans
un autre logiciel SURFER 3.5. Ce dernier, nous a permis de créer des
fichiers GRID et de générer des courbes de niveau suivit du MNT.
Ce dernier est une expression numérique de la topographie sous forme
matricielle ou vectorielle. Il exprime en quelque sorte la vision à
trois dimensions des courbes de niveau. Pour le réaliser, SURFER a
été mis à note disposition par le laboratoire de
géomatique de la MEADEN.
ii. Étude du fonctionnement
hydrologique
En général, selon Lavigne et Camphius (1997),
deux types d'écoulements d'eau caractérisent l'hydrologie du bas
fond : les écoulements de surface et ceux hypodermiques. La
complexité du fonctionnement hydraulique du bas-fond, se lit à
travers les périodes de submersion et leur durée, la forme et la
dynamique des crues, l'amplitude des variations saisonnières de la
nappe. Dans cette étude, nous avons reposé cet aspect du
diagnostic sur la connaissance du débit maximal et sur la dynamique de
la nappe dans les puits pendant la période d'étude.

Pour la connaissance du débit maximal passant dans le
bas fond, nous avons utilisé deux méthodes de mesure de
débit suivant les sites choisis. La première, utilisée en
amont et an aval (entrée et sortie) du bas fond, est la méthode
volumétrique. La seconde, utilisée dans un canal homogène
du bas fond, est celle de Manning Strickler (MS). Ces méthodes nous ont
permis de connaître non seulement le flux potentiel du bas fond, mais
aussi de comprendre certaines difficultés paysannes sur la gestion de
l'eau.
La méthode volumétrique est la plus directe pour
la mesure de débit dans un canal qui décharge l'eau. Elle a
consisté en l'utilisation d'un seau de 20 litres et un
chronomètre (chronomètre d'un téléphone portable)
pour mesurer le temps de remplissage de celui-ci. Les données sur les
trois mois plus pluvieux ont été collectées sur une fiche.
Le débit est calculé à partir du temps et volume par la
formule :
Q = V/T
V : volume en litre (l) ; T : le temps en seconde (s) et Q le
débit en l/s
Deux sites de mesures ont fait l'objet d'application de cette
méthode montrée par la figure 3.6. Le premier (site 1) est
situé entre la tête et l'amont du bas fond et le second dans sa
partie avale, en zone terminale ou déversoir du lit mineur.

Figure 3.6 : Mesure de débit
volumétrique sur le site 1
La méthode de Manning Strickler correspond à un
écoulement dans une section normale du bas fond assimilée
à un canal. Elle nécessite des mesures de hauteur d'eau qui
peuvent se faire après le passage de l'eau, et une estimation de la
rugosité. Il faut se
situer dans un écoulement en régime permanent
fluvial (Lavigne et Camphius, 1997). La formule du débit est
donnée par :
Q = Ks*R2/3*i1/2*S
Ks : la rugosité du terrain ; R (m) : le rayon
hydraulique, i : la pente du terrain et S (m2) : la section du
canal.
Pour répondre à ces conditions, nous avons
procédé par l'identification des tronçons homogènes
sur le lit mineur et à la sélection des sections étroites
d'écoulement fluvial. Les images satellite de très haute
résolution et la visite de terrain ont permis de faire cette
identification. En effet, un écoulement est qualifié de type
fluvial, lorsque les rides de l'impact du jet d'un caillou dans l'eau se
développent bien vers l'amont autant que vers l'aval (Lavigne et
Camphius, 1997). C'est la technique qui a été utilisée
pour s'assurer du type de l'écoulement dans le canal. Les mesures ont
consisté à déterminer la hauteur d'eau atteinte dans le
canal à l'aide d'une règle graduée. Dans ce canal, la
longueur moyenne (L) a été d'abord mesurée directement par
un double décamètre. Comme elle ne varie pas, la hauteur d'eau
(h) ou largeur du canal, est alors mesurée à différentes
périodes. Ces deux paramètres (figure 3.7) sont utilisés
pour calculer le périmètre et la section mouillés
(Pm, Sm) à partir desquels le rayon hydraulique
est déterminé. Les formules utilisées pour ce calcul sont
les suivantes :
Pm = L+ 2h Sm= L*h R = Sm /
Pm
avec Pm, L, h et R en mètre et Sm
(m2)
Quand à ce qui concerne la rugosité du canal Ks,
nous avons utilisé les valeurs expérimentales du coefficient de
Manning Strickler, n, en tenant compte de la situation du canal pendant la
mesure. Le tableau utilisé à cet effet est présenté
en annexe 2.
Le calcul des différents débits a été
effectué avec le logiciel Excel 2003. Ce qui a permis d'avoir un
débit maximal moyen du bas fond.


L
Figure 3.7 : Paramètres d'un canal
rectangulaire

En ce qui concerne la dynamique de la nappe phréatique
dans les puits, la méthode choisie est la mesure
répétée des profondeurs d'eau dans ces puits. Elle nous a
permis de voir la variation du niveau de la nappe phréatique et sa
relation (influence sur la recharge) avec les écoulements de surface
dans le bas fond. Premièrement, nous avons procédé au
choix des puits pouvant caractériser la nappe du bas fond. Ceci a
été possible grâce à la présence de quatre
puits le long de son versant. Les trois premiers puits sont localisés en
tête et sur le versant de la zone amont alors que le quatrième est
situé en partie avale du bas fond. La mesure de la profondeur de la
nappe phréatique s'est effectuée à l'aide du
décamètre. Nous attachons une masse au bout du
décamètre pour former un fil à plomb qu'on lance dans le
puits en cherchant le plus faible contact avec la surface de l'eau dans le
puits (figure 3.8). Ainsi, nous lisons la profondeur à partir d'un point
marqué, considéré comme point de mesure de la profondeur,
pris sur le bord du puits. Les données sont relevées sur une
fiche et introduite par la suite dans le logiciel Excel pour l'analyse et
interprétation des données. Ce qui a permis de ressortir les
graphiques sur la vitesse d'augmentation du niveau de la nappe dans les puits
et sur leur variation suivant le long du bas fond.
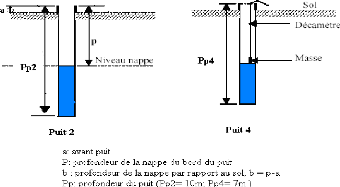
Figure 3.8 : Profondeurs des puits et
méthode de mesure de la nappe.
iii. Le plan parcellaire du bas fond
Le plan parcellaire a été réalisé,
sous la base des données numérisées de chaque parcelle du
bas fond à l'aide d'un SIG, pour permettre de comprendre l'occupation
spatiale des parcelles et le mode d'exploitation actuelle du bas fond. C'est
à partir de ces éléments que l'organisation de cet espace
a été mise en évidence. Les données

collectées sur le terrain ont été
introduites numériquement grâce à l'image satellite
Qick bird du terroir. Pour la collecte des données, nous avons
d'abord élaboré une fiche d'identification des parcelles qui est
présentée sous forme d'un tableau à double entrée
avec des éléments d'informations sur l'exploitant et l'historique
(de 2 ans) de sa parcelle. En suite, on a procédé sur le terrain,
au levé GPS de chaque parcelle du bas fond où les
coordonnées géographiques de tous les quatre coins de la parcelle
sont marqués, relevés et enregistrés par la suite. C'est
lors de ce levé que les informations de la fiche d'identification sont
également collectées. Un exemplaire de la fiche est
présenté dans l'annexe 1. C'est ainsi que toutes les 184
parcelles ont été identifiées. Nous avons eu recours
à un guide, fils du terroir, lors de nos travaux de terrain. Lorsque
deux à trois parcelles sont identifiées, un schéma du
parcours est réalisé pour permettre d'harmoniser la suite du
travail et de marquer certaines images en mémoire.
Enfin un travail de bureau a permis de récupérer
les données de l'appareil GPS dans MapSource et dans MapInfo (logiciels
SIG version 8.5) et de produire la carte du parcellaire. Dans un premier temps,
nous avons projeté les points GPS (way points) des parcelles du bas fond
sur l'image satellite Qick bird dans MapInfo pour repérer ces
parcelles. Celles-ci ont été reproduites en créant des
polygones joignant les quatre points levés sur le terrain. Nous avons
par la suite créé des liens attributaires pour tous les polygones
du parcellaire. Ainsi, les informations relatives aux parcelles ont
été introduites donc numérisées. Les
matériels utilisés lors de levé topographique à
l'exception du niveau de chantier et de la mire parlante, l'ont
été pour ce travail. De même, les bottes pour faciliter nos
déplacements à l'intérieure des parcelles et un appareil
photo numérique de marque CAMEDIA ; OLYMPUS
C-220 zoom ont été utilisés.
| 

