3.5 La régulation de la vitesse
Nous avons besoin de commander la vitesse de robot, et pour ce
faire nous utilisons la méthode du PWM (Pulse Width Modulation).
3.5.1 Principe de la PWM
La méthode du PWM (Pulse Width Modulation) consiste
à envoyer très rapidement des impulsions aux moteurs. Ces
impulsions sont en fait un signal créneau avec un niveau bas de 0V et un
niveau haut de 5V. En faisant succéder ces impulsions très
rapidement, le moteur finit par calculer la moyenne de ces impulsions. Ainsi
pour faire varier la vitesse de rotation du moteur on fait varier le rapport
cyclique du signal PWM.
V
10 %
Vcc
t
T
50 %
V
t1
t2
t
V
90 %
t
Figure 3.10 : Exemples de signaux
PWM.
Le pilotage des moteurs se fait par PWM. Un signal PWM est un
signal dont la période est fixe, mais le rapport cyclique varie. Le
rapport cyclique représente le rapport entre la durée de
l'état haut et celle de l'état bas, la vitesse est donc
proportionnelle au rapport cyclique. En d'autres termes, t1 et t2 varient tout
en conservant t1+t2=T=constante. La tension moyenne appliquée au moteur
est proportionnelle au rapport cyclique selon la formule:
Vmoy = (t1
x Vcc) / T (3.1)
Nous avons utilisé les broches PWM du module ROVIN, car
elle offrent la possibilité de piloter des moteur à courant
continu « CC ».
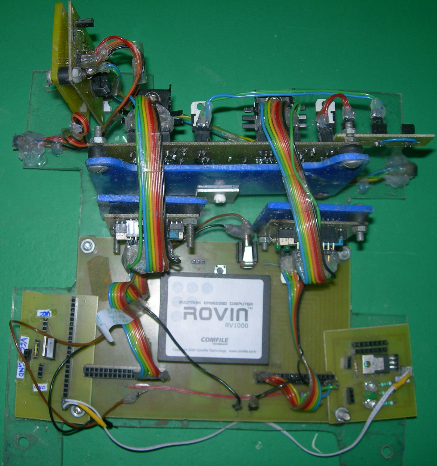
Figure 3.11 : La partie
électronique du robot mobile.
3.6 Conclusion
La gestion des différents systèmes du robot
mobile se fait par le module ROVIN (carte de commande), la commande des moteurs
à courant continu « CC » se fait par les ponts
en H (carte de puissance), la protection de carte de commande se fait par
l'isolation galvanique (Optocoupleurs),
Nous avons choisi de décrire une partie de
l'électronique du robot qui est en relation directe avec les capteur
dans le chapitre précédent, cela nous a permis de comprendre la
partie perception de tous les cotés. Les tests ont montré que
toutes les cartes électroniques réalisées fonctionnent
convenablement.
 
| 

