5.2. Expérimentations
La présente section illustre certains résultats
obtenus avec la méthode de SAP par modélisation statistique ainsi
que certaines expérimentations avec différents paramètres
de l'algorithme. Il est à noter que pour toutes les
expérimentations réalisées, la fonction d'ajustement
automatique (auto white balance) de la camera était
désactivée. De plus, les valeurs utilisées pour le temps
d'intégration ainsi que le gain du capteur étaient fixées
et non modifiées au cours d'une même acquisition. Nous avons fait
nos acquisitions avec de caméra HD afin d'avoir une résolution
correcte, nette et bien pixélisée.
49
5.3. Performance
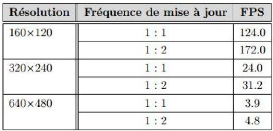
Le tableau suivant résume la capacité de
traitement de l'algorithme à différentes résolutions et
pour certaines fréquences de mise à jour. Il est important de
noter qu'aucun affichage n'a été réalisé pendant
ces expérimentations. Donc, pour des images de dimensions 320 x
240, le système peut traiter jusqu'à 24 images par seconde
(FPS ou Frame Per Second).
Tableau 2: Tableau comparatif de performance
pour la soustraction de l'arrière-plan à
différentes résolutions d'images et fréquences de mise
à jour du modèle
Source : Mémoire pour l'obtention du grade de
maître ès sciences, Alexandre Lemieux, 2003
Par ailleurs, lorsque la fréquence de mise à
jour est abaissée de moitié, le nombre d'images traitées
par seconde augmente rapidement (surtout à basses résolutions)
avec, par exemple, un gain de 48 FPS pour une résolution de 160 x
120 (c.-à-d. : passe de 124.0 à 172.0 FPS). Notons cependant
que la quantité d'images traitées ne double pas lorsque la
fréquence de mise à jour est abaissée de moitié.
Ceci s'explique simplement par le fait que les opérations
nécessaires à la mise à jour du modèle ne
constituent pas l'ensemble des étapes à effectuer à chaque
itération de l'algorithme.
5.4. Implémentions de méthodes de
détection : Résultats et discussions
Nous avons choisi trois méthodes parmi celles
étudiées à l'état de l'art pour faire une
implémentation et comparaison de résultats afin de mener une
discussion et souligner l'importance de la méthode choisie
définitivement pour l'étude et la rédaction de ce
mémoire.
5.4.1. Détection par différence entre deux
images consécutives
Étant peu complexe, la différence entre des
images consécutives représente une solution très
intéressante. Comme son nom l'indique, elle consiste à soustraire
une image
50
acquise au temps tn d'une autre au temps tn +
k, où k est habituellement égal à
1. Ainsi, l'image résultante sera vide si aucun mouvement ne
s'est produit pendant l'intervalle de temps observé car
l'intensité et la couleur des pixels seront presque identiques.
Par contre, si le mouvement a lieu dans le champ de vue, les
pixels frontières des objets en déplacement devraient changer
rapidement de valeurs, révélant alors la présence
d'activité dans la scène. Cette technique nécessite
très peu de ressources, car aucun modèle n'est nécessaire.
Cela implique donc qu'il n'y a pas de phase d'initialisation obligatoire avec
une scène statique, ce qui procure une très grande
flexibilité d'utilisation. Par ailleurs, les résultats obtenus
avec cette méthode ne sont pas aussi précis que ceux
générés en utilisant un modèle statistique de
l'arrière-plan.
En effet, certains traitements supplémentaires sont
nécessaires afin de déterminer la zone en mouvement, car
l'information disponible ne concerne que les contours des régions en
déplacement (ce qui inclut également les zones intérieures
d'un objet).
| 

