3.2.2. Sans l'image de référence
La différence temporelle s'exprime par :
FD (Ic ,Ip) = |Ic - I,,| (13)
Où : FD : image de
différence, IC image courante, et
IP image précédente.
L'image FD (IC, IP) ainsi obtenue
est nulle en tout point où le signal d'entrée I
est constant. Les points où un changement temporel s'est
produit sont détectés par simple seuillage de
FD. Le seuillage est nécessaire à cause
du bruit présent dans les 2 images. Le résultat du seuillage est
une image binaire indiquant les zones en mouvement.

32
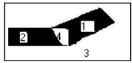
Source : (MEDJAHED, 2012)
Figure 10: Technique de différence sans image de
référence, (a) image précédente, (b) image
courante, (c) image de différence.
- La zone `1' située à l'avant
de l'objet dans le sens du déplacement est constituée de points
qui appartenaient au fond de l'image précédente et qui sont
recouverts par l'objet dans l'image courante. L'amplitude de différences
de niveaux de gris y est fonction du contraste entre l'objet et le fond.
- La zone `2' située à
l'arrière de l'objet est constituée de points qui appartenaient
à l'objet dans l'image précédente et qui ont
été découverts suite au mouvement. Ils appartiennent au
fond de l'image courante. L'amplitude de différences de niveaux de gris
y est fonction du contraste entre l'objet et le fond.
- La zone `3' constituée de points
appartenant au fond et aux objets stationnaires dans les deux images.
L'amplitude des différences de niveaux de gris y est faible.
- La zone '4' qui n'existe que lorsqu'il y a
chevauchement des positions de l'objet et qui est constituée de points
appartenant à l'objet en mouvement dans les deux images. L'amplitude de
différences de niveaux de gris y est faible.
Ainsi, les régions `1' et `4'
retracent l'objet dans l'image à l'instant t,
et les régions `2' et `4' à
l'instant t- dt, les régions `1'
et `2' sont détectées comme des
régions en mouvement, par contre, la région `4'
l'est rarement et le problème est d'extraire cette
région.
33
| 

