|
REPUBLIQUE DU SENEGAL
MINISTERE DE L'ENSEIGNEMENT
SUPERIEUR ET DE LA
RECHERCHE SCIENTIFIQUE
UNIVERSITÉ GASTON BERGER
DE SAINT-LOUIS
U.F.R DES SCIENCES APPLIQUÉES ET
TECHNOLOGIES

Section de Mathématiques Appliquées
Maitrise Mathématiques Appliquées et
Informatique
Option :
Probabilités-Statistique
SUJET : APPROCHE STATISTIQUE SUR L'
ETUDE DES
RENDEMENTS FINANCIERS ET APPLICATIONS
Présenté
par :
Babacar DJITTE
Sous la direction de
:
Pr Ali Souleymane DABYE
Dr El'hadji
Dème
1
Année Universitaire 2013-2014
2
Table des matières
|
Dédicace
Remerciements
Introduction
|
4
5
6
|
|
1
|
Généralités sur les rendements
financiers
|
7
|
|
1.1
|
Définition
|
7
|
|
1.2
|
Les différents types de rendements
|
8
|
|
|
1.2.1 le rendement arithmétique
|
8
|
|
|
1.2.2 Le Log-rendement et le taux de rendement
|
8
|
|
|
1.2.3 Le rendement moyen
|
9
|
|
|
1.2.4 Le rendement cumulé
|
11
|
|
2
|
Approche statistique
|
13
|
|
2.1
|
Définitions et modélisation
|
13
|
|
|
2.1.1 Notion de processus stochastique
|
13
|
|
|
2.1.2 Exemples de processus AR(p)
|
16
|
|
2.2
|
Utilisation des modèles de régression
linéaire
|
17
|
|
2.3
|
Estimation des paramètres du modèle AR(p)
|
20
|
|
|
2.3.1 Méthode de Yule-Walker
|
21
|
|
|
2.3.2 La méthode des moindres carrés
|
22
|
|
|
2.3.3 La méthode du maximum de vraisemblance exacte . .
|
24
|
|
|
2.3.4 La méthode du maximum de vraisemblance conditionnel
25
|
3
|
2.4
2.5
|
2.3.5 Propriétés statistiques des estimateurs
Choix d'un modèle
2.4.1 Critère d'information
2.4.2 Définition
Prévision
2.5.1 Prévision d'un modèle AR(p)
|
28
28
28
28
29
30
|
|
3
|
Simulations
|
32
|
|
3.1
|
Exemples de processus AR
|
32
|
|
|
3.1.1 Les processus AR(1)
|
32
|
|
|
3.1.2 Les processus AR(2)
|
35
|
|
3.2
|
Estimation
|
37
|
|
|
3.2.1 Estimation des paramètres d'une
modélisation AR(1) .
|
37
|
|
|
3.2.2 Estimation des paramètres d'une
modélisation AR(2) .
|
38
|
|
4
|
Application du modèle AR
sur l'indice boursier S&P 500
|
40
|
|
4.1
|
Le S&P 500
|
40
|
|
4.2
|
Présentation des données
|
41
|
|
4.3
|
Applications
|
41
|
|
|
4.3.1 Allure de la série S&P 500
|
42
|
|
|
4.3.2 L'ACF et la PACF de la série S&P 500
|
42
|
|
|
4.3.3 Estimation
|
44
|
|
|
4.3.4 Choix du modèle
|
46
|
|
Conclusion
|
47
|
|
Bibliographie
|
48
|
4
DÉDICACE
Je dédie ce modeste travail
A mon défunt père Pathé, que le Tout
Puissant l'accueille dans Ses jardins
les plus hauts.
A ma chère mère Ndella DJITTE qui a fait de
nombreux sacrifices pour que
mes études se passent dans de très bonnes
conditions.
A nos Etres chers qui ne sont plus dans ce monde. Qu'
Allah(swt) les
accueille dans Son paradis.
A mes chéres soeurs Amy et Mame Diarra .
A tous les membres du Dahira Mafaatihoul Bichri des
étudiants et
ex-étudiants de l'Université Gaston
BERGER
A mes chérs fréres plus
particulièrement à Mor DJITTE, Baye Ibra...
A mes amis d'enfance Khone DJITTE, Modou CISSE, Sangue
CISSE,
Mbaye DJITTE...
A mes camarades Aliou SAME, Maty Cheikh MBAYE, Moulaye
DIOUSS,
Touba SALL, Babacar MBENGUE...
A ma nièce Aissatou DJITTE et à tous les
habitants de mon village natal
NDJITTE
A mes voisins de chambre Lamine NDOYE, Babacar SIGNATE et
Serigne
Mounirou THIOUNE
A tous les Méckhois et Méckhoises.
A tous les étudiants de l'UFR SAT.
Mention spéciale à mes camarades de
promo.
5
REMERCIEMENTS
Aprés avoir rendu grâce à ALLAH, le tout
Puissant et son Prophête Mouha-med (PSL), nous rendons gràce
à Cheikh Ahmadou Bamba notre guide vers le droit chemin.
Je remercie chaleureusement mon encadreur, le docteur El'hadji
DEME de l'Unité de Formation et de recherches des Sciences
Appliquées et Technologies de l'Université Gaston Berger de
St-Louis de sa disponibilité, sa courtoisie, sa compréhension,
son soutien mais aussi pour m' avoir disposé des sujets si
intéressants.
Je remercie aussi le professeur Ali Souleymane DABYE qui n'a
jamais cessé de me donner de bons conseils.
Je tiens à remercier tous ceux qui ont durant mon
séjour universitaire contribué pour la bonne marche de mes
études.
Mes plus profonds remerciements vont à mes parents et
surtout ma mère, tout au long de mon cursus, ils m' ont toujours
soutenu, encouragé et aidé. Je remercie mon oncle Souleymane
DJITTE pour tous les efforts qu'il a fourni afin que mes études se
déroulent dans de très bonnes conditions.
Je salue de passage mes tantes Adama DIAKHATE et Ndeye DJITTE,
qui m'ont soutenu depuis mon enfance.
Et à toutes les personnes que nous avons eu
l'inélégance de mentionner, sachez que sans vous, ce modeste
travail ne verrait pas le jour.
6
INTRDUCTIN
L'utilisation des modèles autoregressifs dans le cadre
de la modélisation des rendements financiers est de plus en plus
courante dans les milieux académiques et pratiques. La principale
motivation derrière le travail de recherche et de synthèse
présenté dans ce texte a été de faire une approche
statistique sur l'etude des rendements financiers et leurs applications.
Ce travail se subdivise en quatre chapitres à savoir
:
Au chapitre 1, on introduit la notion de rendements
financiers. On introduit aussi les différents types de rendements puis
les relations qui existent entre ces rendements.
Au chapitre 2, on présente une approche statistique.
Apres avoir défini la notion de processus stochastique, on
présente les processus autoregréssifs à p
dimensions notés AR(p) qui sont des outils très
essentiels pour étudier les rendements financiers. On va
développer certains outils qui permettent d'estimer les
paramètres du modèle AR mais aussi certains outils qui
nous guident à choisir un bon modéle. Enfin on introduit les
notions de prévisions Au chapitre 3, on présente un exemple
d'application via le logiciel R des outils développés au
chapitre 2 avec un ensemble de données.
On terminera avec le chapitre 4 qui présente une
application statistique du modèle AR pour les rendements de la
série S&P 500.
CHAPITRE1
|
Généralités sur les
rendements finan-
ciers
|
1.1 Définition
Le rendement est défini comme étant le gain ou
la perte de valeur d'un actif sur une période donnée. Il est
constitué des revenues occasionnés et des gains en capitaux d'un
investissement et est habituellement représenté sous la forme
d'un pourcentage. Ces derniers peuvent prendre la forme de coupons pour les
titres à revenus fixes et de dividendes pour les actions
échangées sur les marchés boursiers. Le rendement consite
à mesurer la performance d'un actif ou d'un produit . Dans beaucoup de
problémes d'intérét en finance, le point de départ
est une série chronologique de prix. Pour un certain nombres de prix, il
est préférable de ne pas travailler directement avec des
séries de prix, de sortes que ces derniers seront souvent converties en
séries de rendements. Ainsi par exemple si un rendement annuel est de 10
% alors l'investisseur sait qu'il aura gagné 71500 francs cfa ou bien
715000 francs cfa pour un investissement de 650000 francs cfa et ainsi de
suite.
Deux méthodes sont utilisées pour calculer les
rendements à partir d'une série de prix donnée. Celles-ci
impliquent l'existence de rendement discret (ou rendement simple ou encore
rendement arithmétique ), de rendement
8
(1.2)
continu (ou log-rendement), de rendement cumulé et de
rendement moyen.
1.2 Les différents types de rendements
Dans toute la suite on considère une suite de n prix
d'un titre financier (X1, X2, . . . ,
Xn). On définit le prix Xt > 0 d'un titre
financier observé au temps t.
1.2.1 le rendement arithmétique
On appelle rendement arithmétique (ou le
rendement discret) la quantité définie par:
Rarith t =
Xt-Xt_1
Xt_1
1.2.2 Le Log-rendement et le taux de rendement
Implicitement le prix considèré est celui de la
fermeture. On définit aussi le taux de rendement effectif Rt
sur une période comprise dans l'intervalle de temps [t -
1, t]. C'est le taux composé continument, aussi appelé
force d'intérét, qui aurait occasionné les mêmes
gains ou pertes sur un montant déposé en banque au cours de la
période concernée. Le taux de rendement est la variable
d'intérét dans le contexte de la modélisation
financière.
On associe le taux de rendement effectif à la
différence entre le logarithme du prix initial et final. Dans la
situation où le taux de rendement est déterministe et non
aléatoire, on obtient l'équation différentielle suivante
:
dXt
dt
= Rt.Xt
On peut interpréter cette équation en affirmant
que la variation du prix dXt sur un intervalle de temps infiniment
petit dt est proportionnelle à la valeur
9
actuelle Xt. Cette équation différentielle
a pour solution générale :
Xt = X0eRt.t
(1.1)
Afin de définir les propriétés de
l'échantillon sélectionné, on pose comme
hypothèse:
Hypothèse 1.1 : Le rendement
R(t) est constant durant la période définie par
l'intervalle de temps [t - 1, t], mais il est
différent d'une à l'autre : Rs =6 Rt
pour s =6 t.
On peut alors représenter le rendement
R(t) comme étant la différence entre les
logarithmes des prix observés au temps t et t - 1, ou
encore le logarithme du quotient de ces mêmes prix :
|
Rt = ln(Xt) - ln(Xt_1) = ln Xt
?
Xt-1
|
Un développement limité de Rt nous
donne:
|
Rt = ln
|
Xt ?~
Xt-Xt-1
Xt-1
Xt_1
|
Le terme ln(Xt) - ln(Xt_1) est appelé
le log-rendement.
La formule du log-rendement souvent plus utilisé en
économétrie, est aussi appelé le "log-price" car c'est le
logarithme du ratio (rapport) entre le prix pour la présence
période au prix de la période précédente. D'une
manière générale si Lt représente la variation de
temps, alors le rendement continu de la période qui va de t
à t + Lt est défini par :
R(t,Ät) =
ln(Xt+Ät) - ln(Xt) (1.3)
1.2.3 Le rendement moyen
Le rendement continu a une propriété
qui le rend très maniable. En effet, si l'on s'intéresse non plus
au rendement continu du marché en 2014 mais au
(1.4)
rendement continu de t = 2010 a` t
+ T = 2014, il nous suffit de combiner la
moyenne arithmétique des différentes années
:
Ainsi le rendement moyen est défini par :
1
=
T
T log?Xt+T
1
Rm Xt
(t,t+T ) =
logXt+T ?
.Xt+T-1 . ... Xt+2
.Xt+1
Xt+1 Xt
Xt+T-1 XT+t-2
T ?log Xt+T
1 ?+ logXt+T -1 ?+ . . . +
logXt+2 ?+ log?Xt+1
Xt ?
= Xt+T -1 XT +t-2
Xt+1
|
=
donc on a :
|
1 T
|
?T k=1
|
Rt+k-1,t+k
|
|
1 ?T
Rm t,t+T =
Rt+k-1,t+k
T
k=1
|
Et on s'aperçoit bien que le rendement moyen
est la moyenne arithmétique des rendements continus.
Par exemple pour t = 2010 et t + T =
2014 on obtient comme rendement
4P4
moyen de 2010 à 2014, Rm 2010,2014 = 1
k=1 R2009+k,2010+k. Par conséquent
le
rendement moyen est bien la moyenne arithmétique des
rendements continus. les deux tableaux ci-dessous résume un exemple de
calculs du log-rendement
rln
t et le rendement arithmétique Rarith
t pour quelques valeurs de t. Pt
repré-
sente le prix de l'actif à l'instant t.
Tableau 1 : Prix de l'actif en fonction du temps
|
At
|
(2 - 1)
|
(3 - 2)
|
(2 - 1) + (3 - 2)
|
(3 - 1)
|
|
Rarith t
|
2.00%
|
-1.96%
|
0.04%
|
0.00%
|
|
rln
t
|
1.98%
|
-1.98%
|
0.00%
|
0.00%
|
10
(1.5)
11
Tableau 2 : Calcul du log-rendement et de rendement
arithmétique
1.2.4 Le rendement cumulé
Le rendement de t-jours pour une période
menant de 0 à t est appelé le rendement
cumulé noté Lt et se définit comme
étant la somme des rendements effectifs observés (rendement
continus quotidiens) sur l'intervalle [0, t]. Ce dernier
représente une propriété utile dans le domaine de la
statistique.
|
Lt =
=
|
?t
i=1 ?t
i=1
|
Ri
[ln(Xi) - ln(Xi_1)]
|
= ln(Xt) - ln(X0)
= ln?Xt
X0
donc on a finalement:
Cette représentation permet d'exprimer le prix actuel
Xt en fonction de la valeur initiale X0 sous une forme
similaire á la solution (1.1), mais tenant compte de l'hypothèse
mise précédemment :
eLt = Xt
X0 = Xt = X0eLt
Ce qui entraine en substituant Lt par sa valeur:
Xt = X0 exp?t?i=1
Ri (1.6)
On suppose l'hypothèse suivante :
Hypothèse 1.2 : Les rendements Ri
; i=1, 2, . . . , t ( ou rendement
quotidien) sont indépendants, mais pas nécessairement
identiquement distribués.
On peut alors obtenir la distribution du rendement
cumulé Lt en utilisant le produit de convolution. Notons
öRi la fonction caractéristique d'un rendement
Ri et öLt celle du cumulé Lt.
On obtient alors que cette dernière est égale au produit des
fonctions caractéristiques des rendements effectifs sur chacune des
périodes de l'intervalle [0, t] :
öLt(u) = ?t
öRi(u) Vu E [0,t].
(1.7)
i=1
12
On considére la situation où l'on posera
plutôt l'hypothèse suivante :
Hypothèse 1.3 : Les rendements Ri
pour i=1 ,..., t sont à la fois
indépendants et identiquement distribués.
Alors, la fonction caractéristique des rendements est
égale pour chaque période :
öR(u) =
öR1(u) = . . . =
öRt(u) (1.8)
La formule (1.7) s'écrit ainsi :
öLt(u) =
[öR(u)]n Vu E[0,t] .
(1.9)
Considérer une distribution qui est fermée sous
la convolution pour modéliser les rendements sur une période
Ri peut alors étre intéressant. Le rendement
cumulé Lt pourra aussi être modélisé
à l'aide de la méme distribution. Pour ce faire, on modifie un
paramétre d'échelle en fonction de la longueur t de
l'intervalle de temps considéré.
CHAPITRE2
|
Approche statis-
tique
|
2.1 Définitions et modélisation
En statistique, toute tentative de modélisation se fait
en introduisant la notion de variable aléatoire. L'approche statistique
des rendements d'un actif financier se déroule en plusieurs phases qui
englobent chacune en soi un processus. Aussi de l'appréciation, de
l'évolution de ces rendements à l'estimation, nous aurons
à étaler plusieurs aspects à la fois statistiques et
financiers.
2.1.1 Notion de processus stochastique
L'approche statistique d'une série de rendement
consiste a` mettre en place un modéle statistique qui
considère chaque observation xt pour t=1,. .. ,T
comme la réalisation d'une variable aléatoire
Xt(w) , telle que
Xt : (Ù , F , P) -+ (R , B(R))
où B( R) est la tribu des Boréliens de R et ( ,
F , P) est un espace probabilisé. Dans la pratique Xt
représente le prix et le rendement se modélise comme
étant une variable aléatoire St définies par :
St : (Ù , F, P) -+ (R , B(R))
14
Définition 2.1.1.1 (Processus stochastique)
Un processus stochastique est une famille de variables
aléatoires (Xt) indéxée par un ensemble T, en
général infini, à valeurs dans un espace mesurable (E,
5).
Un élément de T sera appelé
un temps ou une date.
Pour une valeur de w fixée dans I, la fonction qui
associe à chaque date t la réalisation Xt(w) est la trajectoire
du processus au point w. De même, pour une date t fixée dans
T, la fonction qui associe à chaque w la réalisation
Xt(w) est l'état du processus à la date t.
(Xt) et (St) définissent dans la section 2.1.1 sont
des processus stochastiques.
Définition 2.1.1.2 (Processus
autorégressif) Un processus stochastique (Xt) est dit
autorégressif d'ordre p, noté AR(p) s'il est défini, pour
p t par la relation de récurrence
Xt = 1Xt_1 +
ç2Xt_2 + ... +
çbpXt_p + Et
(2.1)
V t E Z
où les variables aléatoires X0,
X1, . . . , Xp_1 sont fixées
arbitrairement. Les valeurs çbi pour i=1,. . .,p sont les
paramètres de ce processus AR(p), tandis que (Et) est un bruit blanc
associé à (Xt), c'est à dire une suite de variables
aléatoires indépendantes et de même loi centrées et
de carré intégrable. Le polynôme A(X) =
1-çb1X -. .
.-çbpXp définit le polynôme
caractéristique du processus.
Définition 2.1.1.3 (Processus stationnaire)
Un processus autorégressif (Xt) est asymptotiquement
stationnaire si et seulement si son polynôme caractéristique a
toutes ses racines à l'exterieur du disque unité.
Définition 2.1.1.4 Un processus (Xt)
est stationnaire au second ordre si i) pour t, E(X2 t
) < +00,
15
ii)pour tout t, E(Xt) = u, constante
indépendante de t,
iii)pour tout t et pour tout h, cov(Xt, Xt+h)=E([Xt
- u][Xt+h - u]) = ã(h), est indépendant de
t
Définition 2.1.1.5 La fonction
ã(.) sera appelée fonction d'autocovariance.
On peut montrer aisément que ã(.) est une
fonction paire, au sens où ã(h)=ã(-h)
Définition 2.1.1.6 (Corrélation)
Etant donnés deux processus (Xt, t E T) et (Yt, t
E T)) avec t E T et t + h E T.(T est
l'espace des temps).
La corrélation est définie par
Cov(Xt, Yt+h)
Xt)ó
Yt
(
(
+h
ãh(Xt, Yt+h) = (2.2)
ó
oú ó(Xt) et ó(Yt) sont les
écart-types respectifs des processus Xt, Yt et
ó(Xt)ó(Yt+h) 0.
Définition 2.1.1.7 (fonction
d'autocorrélation) On se donne un processus stationnaire
(Xt, t E T). On définit le coefficient d'autocorrélation
ou fonction d'autocorrélation par
Cov(Xt, Xt+h)
h 7? ãX(h) = ó(Xt)ó(Xt+h)
.(2.3)
La fonction ãX prend ses valeurs dans [-1; 1]
et on a aussi ãX(0) = 1
Définition 2.1.1.8 (Autocorrélogramme)
La matrice d'autocorrélation ou matrice de Toeplitz du
vecteur (Xt, Xt+1, ... , Xt+h) est définie par
:
1 ã(1) ··· ã(h -
1)
ã(1) ... ... ...
ã(1)
ã(h - 1) ···
ã(1) 1
????????
? ???????
...
...
. ..
A(h) =
2.1.2 Exemples de processus AR(p)
Exemple 2.1.2.1 (Processus stationnaire)
Soit Xt le processus AR(1) dit de Markov définit par
:
Puisque Xt_1 = LXt donc on a Xt(1 -
25L) = Et
le polynome caracteristique du processus est donc P(z)=1
- 25z , qui a pour racine z = 52 .
Or |z| > 1 , donc le processus de Markov est bien un processus
stationnaire.
Exemple 2.1.2.2 (Processus non stationnaire)
On se donne Xt le processus AR(1) définit par :
Xt = Xt_1 + Et.
On a Xt_1 = LXt ce qui donne Xt(1 - L)
= Et
le polynome caracteristique du processus est donc
P(z) = 1 - z, qui a pour racine z = 1 . De |z|
= 1, on en déduit que notre processus est donc non
stationnaire.
Considérons maintenant le processus AR(3)
définit par :
Zt = 3Zt_1 4
3
Zt_2 + 4
11
Zt_3 + Et
La première étape sera encore d'exprimer
cette équation en utilisant l'opérateur retard L et en
factorisant par Zt
11
Zt = 3LZt 4
L2Zt +
34L3Zt + Et
16
11
(1-3L+ 4
L2-3
4L3)Zt=Et.
17
L'équation caractéristique est donc
11
1 - 3z + 4 z2 - 3
4z3 = 0
Une factorisation de l'équation
précédente donne :
3 1
(1 - z)(1 - 2z)(1 -
2z) = 0.
Ainsi les racines d'une telle équations sont z1 =
1, z2 = 23, z3 = 2.
Or la racine z2 = 2 est en dehors du cercle
unité car |z2| > 1, ce qui implique la non
stationnarité du processus Zt.
NB : la série de rendement est un
processus autoregressif AR(p) où p est la
taille de l'échantillon. On l'appelle l'ordre du processus
2.2 Utilisation des modèles de régression
linéaire
On dispose d'une suite d'observations (X1,
X2, ... , Xp) de prix d'actif financier. A partir de
ces observations, on définit l'echantillon de rendement
(R1, R2, ... , Rp). Puisque la
série de rendement (Rt) est un processus auto-régressif
d'odre p donc elle peut se mettre sous la forme :
Rt = '1Rt-1 +
ç2Rt-2 + ... +
OpRt-p + Et, Vt E Z (2.4)
V t E Z L'équation (2.1) est equivalent à
l'écriture :
A(L)Rt = Et oú
A(L) = 1 - çb1L - ... -
çpLp
Prédire ou expliquer les valeurs de Rt á
partir des valeurs de Rt-1, Rt-2, ... , R1 et
(Et) est le terme d'erreur ou encore résidus du modèle
ou encore bruit blanc : Et ti N (0,u2) c'est
à dire une loi normale, elle résume tout ce que le modéle
n'explique pas.Les (Et) sont indépendantes.
- Rt est dite "variable endogène", c'est la
variable dont on essaie de prédire les valeurs (variable
expliquée) ;
- Rt-1, Rt-2, ... , R1 sont les " variables
exogènes ", ce sont les variables qui servent à prédire
les valeurs de Rt (variables explicatives).
- Les çi pour i=1, ... , p
sont les paramètres positifs ou négatifs à estimer
Les variables de Rt-i, pour i=1 , ... ,
p sont donc connues (ou mesurées rapidement, facilement) elles
servent à prédire les valeurs des Rt qui sont inconnues
(ou connues avec retard).
La régression linéaire multiple utilise deux
méthodes de résolution :
- La connaissance des coefficients de corrélations
linéaire simple de toutes les paires de variables entre elles, de la
moyenne arithmétique et des écarts-types de toutes les
variables.
- La seconde repose sur des calculs matriciels.
Nous nous intéresserons de cette dernière
méthode de résolution dans la suite. Ecrivons l'équation
(2.1) sous la forme matricielle. Pour t = p+ 1 , ... , n on a
:
Rp+1 = O1Rp + 02Rp-1 + ... + OpR1 +
Ep+1 Rp+2 = ç2Rp-1 + ç3Rp-2 + . . . +
çpR2 + Ep+2 Rn = ç1Rn-1 + 02Rn-2
+ . . . + OpRn-p + En
???????
Rp+1
Rp+2
...
Rn
? ??????
Posons :
Y = R(p+1):n =
18
un vecteur de (n - p) rendements.
02
...
0p
01
Ö=
???????
???????
Ep+1
Ep+2
...
???????
En
???????
01
02
0n
u2
???????????
...
???????????
19
un vecteur de p nombres réels.
E = E(p+1):n =
un vecteur de (n - p) termes d'erreur E
ti N (0,cr2T[).
Donc en regroupant les (n - p) on obtient
l'expression du modèle linéaire suivante :
Y = RÖ + E (2.5)
où R est la matrice de rendements de
taille (n - p) * p définie par :
R = ???????
???????
Rp Rp-1 ··· R1
Rp+1 Rp ···
R2
...
...
. ..
Rn-1 Rn-2 · · ·
Rn-p
Les paramètres à estimer sont le vecteur Ö
et la variance ci2 du bruit blanc E, Autrement dit
le vecteur défini ci-dessous :
20
Pour ce faire différentes méthodes ont
été proposées.
2.3 Estimation des paramètres du modèle
AR(p)
A cette étape, on se donne un modèle
AR(p) où l'ordre p est supposé connu.
Il convient alors d'estimer les paramètres ' et
ó2. Sous l'hypothèse E suit la loi
normale de moyenne 0 et de variance ó2, on usera la
méthode de Yule-Walker, la méthode des moindres carrés, la
méthode du maximum de vraisemblance conditionnel et la méthode du
maximum de vraisemblance exacte . Nous allons, dans ce paragraphe,
présenter la démarche de l'estima-tion par ces différentes
méthodes.
Equations de Yule-Walker
Considérons la série de rendement (Rt)
définie dans l'équation (2.4)
En multipliant les deux membres par
Rt-j et en prenant l'espérance on
obtient
E(Rt-iRt-j) = E( ?p
öiRtRt-i) + E(EtRt-j) i=1
or E(RtRt-j) = ãj par
définition de la fonction d'autocovariance. Les termes du bruit blancs
sont indépendants les uns des autres et, de plus
Rt-j est indépendant de Et pour
tout j positif ou nul.
Donc pour je N* on a E(EtRt-j) = 0
et pour j = 0 on a :
E(EtRt) = E[~t( ?p
öiRt-i + Et)
i=1
= ?p öiE(EtRt-i) +
E(4) i=1
= 0 + ó2
21
|
Donc E(ctRt) = ó2
Maintenant pour j > 0 on a :
?p
ãj = E[
i=1
|
öiRt-iRt-j] +
ó2äj
|
äj = ????
où äj est le symbole de Kronecker
définit par :
1 si j = 0 0 sinon
Par ailleurs ,
|
?p
E[
i=1
|
p p j p
Rt-iRt-jJ = ?
i=1
|
p p
öiE(RtRt-j+i) = ?
i=1
|
öiãj-i
|
Ce qui donne les équations de Yule-Walker
ãj = ?p
öiãj-i + ó2äj
pour j E N i=1
et ãj = ã-j
?p öiã|j|-i +
ó2äj pour j N i=1
2.3.1 Méthode de Yule-Walker
La méthode consiste à reprendre les
équations de Yule-Walker en inversant les relations : on exprime les
coefficients en fonction des autocovariances. On applique alors le raisonnement
de la Méthode des moments et ensuite on trouve les
paramètres estimés d'après les autocovariances
estimées. En prenant l'equation sous forme matricielle :
r = or' (2.6)
avec :
22
|
Ö=
|
???????????
|
ö1
ö2
...
öP
ó2
|
? ??????????
|
p1 ã-2 ã-3 ' ' ' 1
ã-1 ã-2 ' ' ' 0
, = ã0 ã-1 ' ' ' 0
ã1 ã0 ''' 0
1
ãP-2 ã0 ' '' 0
et
???????????
???ã1
ã2
= ã3
? ...
ãP
Et on en déduit les estimateurs attendus.
|
èà =
|
???????????
|
àö1
àö2
...
àöP
àó2
|
? ??????????
|
2.3.2 La méthode des moindres carrés
On utilise ici les équations de Yule-Walker qui
consiste à substituer les autocorrélations théoriques par
leurs estimateurs afin de retrouver les esti-
mateurs de la méthode des moindres carrés du
modèle par la résolution des équations de Yule-Walker.
On considère toujours l'équation définie
en (2.4) dans laquelle on ajoute une constante c. On a donc :
Rt = c+
ö1Rt-1+ ...+
öpRt-p + Et
=
Z'tâ' + Et
avec Et ~ N(0, ó2)
où Z't = (1,
Rt-1, Rt-2, . . . , Rt-p)
et â' = (c, ö1, ö2,
... , öp)
Notons par Zt et â respectivement les
transposées de Z't et
â'.
L'estimation des paramètres ó2
et â, du modèle Rt =
Z'tâ'+Et
par la méthode des moindres carrés donne
âà =(ZtZ't)-1ZtRt
1
àó2 =
et
âà est
T - (p + 1)?(Rt - Z't
4)2
Les résultats usuels d'économétrie ne sont
pas vérifiés ici, en particulier
biaisé(i.e E(0) =6 â). Il
est toutefois possible de montrer le résultat suivant :
Propriété 2.3.2.1 Si le
processus AR(p)est stationnaire alors
âà asymptotiquement sans biais c est á
dire âà ?P â
et
a2 P? ó2,
de plus
vT (âà - â) ?
loiN(0, ó2V)
oú
1
V = p lim
T ?+8 T
ZtZ't.
23
Remarque 2.3.2.1 Si la méthode des
moindres carrées peut être utilisée pour estimer les
paramètres d'un modèle AR(p), elle ne marche plus dès lors
que l'on a des termes autorégressifs sur les résidus.
2.3.3 La méthode du maximum de vraisemblance
exacte
L'estimation d'un modéle AR(p) par la
méthode du maximum de vraisemblance est délicate car la fonction
de vraisemblance est très complexe et n'a pas de dérivée
analytique. Cette difficulté provient de l'interdépendance des
valeurs , ainsi que du fait que les observations antérieures ne sont
toutes disponibles pour les p premiers valeurs. Pour determiner la
vraisemblance, il est nécessaire de supposer connue la loi des erreurs.
Nous supposerons les erreurs normalements distribuées. Cette
méthode fait appel à la fonction d'autocorrélation pour
déterminer la fonction d'autocorrélation de toutes les
données de la série; ce qui permet d'évaluer la
vraisemblance conjointe. Soit
r
?
?????????????
? ?????????????
Yt
Yt-1
Y=
Yt-2
...
Y2 Y1
24
et soit la matrice T × T de covariance
Y (T le nombre d'observations de l'échantillon). La vraisemblance de Y
est
2 exp?-Y '-1Y
f(Y |ö, ó2) =
(2ð)-T 2 ||-T
2
On en déduit la forme de la log-vraisemblance (exacte, et
non conditionnelle),
L(ö,ó2;Y) = -T 2
ln(2ð) - T 2 ln || - 1 2Y
0-1Y
25
avec F la matrice des autocovariances ,
?
F= ?????????????
Y0 Y1 ... ...
YT-1 YT
|
Y1 Y0 ... ... YT-2 YT-1
Y2 Y1 ... ... YT-3 YT-2
... ... ... ... ... ...
YT-1 YT-2 ... ... Y0 Y1
YT YT-1 ... ... Y1
Y0
|
?? ?????????????
|
Ces autocovariances sont données par les paramètres
du modèle (exceptées les constantes) ö et
ó2. Souvent on a recours à un algorithme de
maximisation pour trouver le vecteur de paramètre maximisant la
log-vraisemblance. D'une manière générale, cette
méthode est considérée comme étant plus
précise que celle du maximum de vraissemblance approché ou
conditionel. On peut noter que la maximisation de la vraisemblance exacte est
un problème d'optimisation non-linéaire.
2.3.4 La méthode du maximum de vraisemblance
conditionnel
Une manière de simplifier la complexité de la
fonction de vraisemblance est de conditionner cette fonction aux p
premières observations c'est â dire on utilise la densité
de Rt sachant Rt-1, Rt-2, ... , pour
estimer les paramétres du modele AR(p). Ces
données sont supposées suivre conditionnellement une loi normale.
En considérant l'équation (2.4), cette densité est donc
:
2 exp-~2 i
f(Rt|Rt-1, Rt-2, ... ,
ö, ó2) = (2ðó2)-1
2ó2
2 1 -(Rt -i=1
öiRt-i)2
= (2ðó) 2 exp
2ó2
Et étant un bruit blanc, on a la
vraissemblance conjointe qui s'exprime comme suit :
|
f(Rt|Rt-1,Rt-2,...
,ö,ó2) =
|
?t i=1
|
- 2
(2ðó2) 21 exp i
2ó2?
|
la fonction log-vraissemblance est définit par
2 i
1
L(ö, ó2;
Rt|Rt-1, Rt-2, ...) = - ?
ln(2ð) - ? ln(ó2) - 1
t?i=1ó2 .
2 2 2
NB :
La condition du premier ordre pour la moyenne des
paramètres d'une log-vraisemblance normale ne dépend pas de
ó2. Ainsi l'estimateur du maximum de vraisemblance
de la variance est :
|
àó2 = T-1
|
?T t=1
|
(Rt - ö0 - ö1Rt-1
- ... - öpRt-p)2
|
|
= -
|
1
2
|
?T t=1
|
?T
1 ln?T-1 t- T PT
t
t=1 2
ln(2ð) - T?t=1 2PT
2
2 t=1 2
t=1 t
|
|
|
|
|
= -
|
1
2
|
?T t=1
|
?T
1 ln?T-1
ln(2ð) - T?t=1 t-
T
2
2 2
t=1
|
|
= -
|
1
2
|
?T t=1
|
?T
T 1 ln?T-1 t
ln(2ð) - T?t=1 2
2 - 2 t=1
|
|
= -
|
1
2
|
?T t=1
|
T T
ln(2ð) - 2 - 2
ln(àó2).
|
26
= T-1
L(Rt|Rt
Ceci introduit dans la log-vraisemblance fait que
? 1
T
Et 2
-1, Rt-2, ... ; ö,
ó2) = - ln(2ð) + ln?T-1
Et +
2 t=1 t=1
T-1PtT=1
Et2
|
= -
|
1
2
|
?T t=1
|
?T
1 2
ln?T-1 t- T t
ln(2ð) - T?t=1 2
T?t=1 T-1PT
2 2 t=1 2
t=1 t
|
27
La maximisation de cette fonction par rapport aux
paramètres ö correspond à la minimisation des
erreurs du modèle.
Autrement dit
max L(Rt|Rt-1, Rt-2, . .
. ; ö, ó2) = -T2
ln àó2
avec
àEt = Rt - ö0 -
ö1Rt-1 - ö2Rt-2 - . . .
- öpRt-p
L'estimateur du maximum de vraisembance conditionnel
correspond ainsi à celui des moindres carrés. L'estimateur obtenu
sera équivalent à l'estimateur inconditionnel dans de grands
échantillons et tous deux ont la même distribution asymptotique
1. Il peut être biaisé2
NB : Ces estimations nous permettent de faire
des prévisions.
2.3.5 Propriétés statistiques des
estimateurs
Davidson et McKinnon (1993) rapportent que l'estimateur des
moindres carrés conditionnel est biaisé, mais néanmoins
convergent. Cryer et Chan (2008) proposent une simulation Monte-Carlo pour
tester les différents estimateurs.
2.4 Choix d'un modèle
2.4.1 Critère d'information
Cette approche a été introduite par Akaike en
1969. Cette mesure de l'ecart entre le modèle proposé et la vraie
loie peut être obtenue à l'aide de la quantité de
Kullback.
1. Hamilton 1994, p. 126
2. voir Greene (2005, p. 256)
28
2.4.2 Définition
On se donne f0 la densité inconnue
d'observations et ?f(.), f E F?
la famille des densités parmi lesquelles on a fait
l'estimation. L'écart entre la vraie loi et le modèle est
donné par
fEF? log f0(x)
I(f0, F) = min f(x) f(x)dx
Cette quantité est toujours et s'annule seulement si
f0 appartient F. Cette quantité étant inconnue
car f0, on essaiera de minimiser un estimateur de I,
àI. Plusieurs estimateurs de la
quantité d'information ont été proposés, dans le
cas de modèles AR(p), à partir de T
observations. Dans la suite on supposera disposer d'un modèle
AR(p).
Nous avons vu jusqu'á maintenant que les fonctions
d'autocorrélation et d'au-tocorrélation partielle nous permettent
de determiner l'ordre d'un modèle autorégressif.Maintenant,
l'idée est de créer des critères statistiques qui
choisiront l'ordre du mod`ele.
Critère AIC et BIC pour processus
autorégressif
L'idée du critère AIC, appelé encore le
critère d'Akaike est de créer une fonction qui nous permettra de
calculer la qualité de l'ajustement .On sait que le nombre de
paramétres augmente, la variance àó2
diminue. Dans le but de ne pas se retrouver avec une
surparamétrisation du modèle, on ajoute un facteur qui permettra
de faire un compromis entre le nombre de paramètre et la variance
minimale. Dans les paragraphes qui suivent, on considère un
modèle AR(p) et on calcule àó2 a`
l'aide du maximum de vraisemblance pour plusieurs valeurs positives de
p. Le critére AIC consiste à calculer
AIC(p) = log(àó2) + 2 p
T
où T représente le nombre
d'observations En utilisant ce critère, on remarque que si pà
est le paramètre obtenu de la minimisation et que p est le
paramètre
du vrai modèle, on a la proprièté
suivante
P(àp ~ p) -+ 1
lorsque T -+ oc
Le critère a donc tendance à choisir un nombre
de paramètres plus grand que celui du vrai modèle, ce qui nous
conduit à un plus petit terme d'erreur
àó2. Si l'on désire
avoir un meilleur choix de l'ordre p, il existe le critère BIC qui
utilise une plus forte pénalité. Le critére BIC
(Critère d'Information Bayé-sien) sélectionne le
paramètre p qui minimise la quantité suivante :
BIC(p) = log(àó2)
+ p T log(T)
.
2.5 Prévision
Une fois que l'on a spécifié et estimé un
processus AR, qui a passé avec succés les tests de
validation, on désire l'utiliser pour effectuer des prévisions
sur la série. On dispose donc des donnèes
X1, . . . , XT observé entre 1 et T,
et on désire prédire la valeur de la série à
l'horizon h avec h ~ 0 , à savoir
XT+h. On note TX* T +h ce
prédicteur et on suppose que tous les processus AR seront mis
sous forme canonique, et n'avoir aucune racine unité.
2.5.1 Prévision d'un modèle AR(p)
On considére toujours l'équation (2.4). Le
modèle s'écrit donc,
Rt = ö1Rt_1 + ... +
öpRt_p + Et oh (L)Rt = Et
La prévision optimale (horizon h = 1) à la
date T + 1, faite à la date T est
29
TR* T+1 =
E[L(RT+1|RT,RT_1 ...)]
30
Aussi,
TR*T+1 = ö1RT + ...
+ öpRT-p De mani`ere analogue,
RT+h =
ö1RT+h-1 + . . . +
öpRT+h-p + ET+h
Et donc,
T R* T+h =
E[L(RT+h|RT, RT-1 ...)] est donné,
de façon récursive par
T R* T+h =
ö1.T RT+h-1 + . . . +
öh-1.T RT+1 + öhRT + . . .
+ öpRT+h-p pour tout h <
p et TRz,+h =
ö1.TRT+h-1 + . . . +
öh-1.TRT+1 sinon
Exemple 2.5.1.1 Dans le cas d'un processus
AR(1), (Xt) défini par :
Xt = öXt-1 + u + Et
alors :
i) TXi',+1 = öXT + u
(horizon h=1)
ii) TXT+2 = ö.TX*T+1
+ u = u + ö[u +
öXT]=u[1 + ö] +
ö2XT (horizon h=2)
iii) TXT+3= ö.TX*T+2
+ u = u + ö[u + ö(u
+ öXT)]=u[1 + ö +
ö2] + ö3XT (horizon
h=3)
et récursivement on peut obtenir
TX7,+h de la forme
TXT+h =
ö.TX4,+h-1 + u =
u[1 + ö + ö2 + ... +
+öh-1] + öhXT
Exemple 2.5.1.2 Une méthode
alternative est de considérer le processus centré Yt =
Xt - uó alors Yt = öYt-1 + Et.
31
Alors de facon réçursive
TYT*+h =
ö.T Y *-1
T +het donc
TY T * +h =
öhYT . Aussi on
peut écrire
T X* T
+h = u ö +
öh[XT -
u ö]
= u
1 - öh
1 - ö +
öhXT
= u(1 + ö + ö2 +
. . . + öh-1) +
öhXT .
Dans cette partie, on va essayer de simuler les fonctions
définies dans les paragraphes précédents.
3.1 Exemples de processus AR
3.1.1 Les processus AR(1)
Un processus AR(1) : Xt = çXt_1
+ Et sera autocorrélé positivement si 0 <
ç < 1, et autocorrélé négativement si -1
< ç < 0. Cette série va osciller autour de 0, en
s'ecartant suivant la valeur Et du processus d'innovation (si -1
< ç < +1). Si ç = +1, on obtient une
marche aléatoire et ç > +1 ou ç <
-1 le processus n'est pas stationnaire, et on obtient un modèle qui
explo-sera(à moyen terme). La valeur ç dans le cas
où le proccessus est stationnaire, est la corrélation entre deux
dates consécutives. ç=Corr(Xt, Xt_1)
Exemple 3.1.1.1 ( Processus AR(1)
avec ç1 > 0)
Considérons un processus AR(1) noté
(AR1t) stationnaire avec ç1 = 0.6
c'est-à-dire
AR1t = 0.6AR1t-1 +
Et
On obtient donc le code R et le résultat ci-dessous
pour la simulation de la série (AR1t)
:

33
FIGURE 3.1 - La série AR1
Les trois courbes représentent respectivement
l'allure de la série AR1 (en noire), la fonction
d'autocorrélation (ACF) (en rouge) et la fonction
d'auto-corrélation partielle (PACF) (en vert) de la série
AR1.
La courbe de l'ACF a une décroissance
exponentielle et pour le PACF on note un un Pic significatif
pour le premier retard. Notre processus est donc correlé
positivement .
Exemple 3.1.1.2 (La série AR(1) avec
ç1 < 0)
Soit à etudier la série AR(1) notée
(AR11t) stationnaire avec ö1 = -0.6
c'est-à-dire
AR11t = -0.6AR11t_1
+ Et

Le code ci-dessus nous fournit le resultat suivant:

34
FIGURE 3.2 - La série AR11
Ces allures représentent respectivement celle de la
série AR1 (en noire), celle de la fonction d'autocorrélation
(ACF)(en rouge) et celle de la fonction d'au-tocorélation partielle
(PACF) (en vert) de la série AR11.
On a constaté que l'ACF a une décroissance
sinusoïdale et pour la PACF
35
on note un un Pic significatif pour le premier retard
. On peut aussi remarquer que cette série est
corrélée négativement .
3.1.2 Les processus AR(2)
Le comportement d'un processus AR(2) :Xt =
ç1Xt_1 + ç2Xt_2 +
ct dépendra fortement des racines de son équation
caractéristique 1 - ç1.z -
ç1.z2 =0. Le cas le plus intéressant
est celui où l'équation caractéristique a deux racines
complexes conjuguées et rei9 et
re_i9 pour r<1 : le processus est alors
stationnaire (et oscille alors autour de 0, sans exploser, de la même
facon que les processus AR(1) dans le cas où
|ç| < 1). Le processus est alors quasi-cyclique, de
fréquence , avec un bruit aléatoire.
Exemple 3.1.2.1 (AR(2) avec
ç1 > 0 et ç2 <
0)
Considérons le processus AR(2) noté
(X1t) avec ç1 = 0.6,
ç2 = -0.4. Autrement dit X1t =
0.6X1t_1 - 0.4X1t_2 +
ct. On a le code R suivant:

Le code ci-dessus nous permet de visualiser l' ACF et la
PACF de la série (X1t) :

36
FIGURE 3.3 - La série X1 : ACF(rouge) et
PACF(vert)
On a une décroissance sinusoïdale
pour l'ACF et on a des pics de signification pour le
premier retard et le second retard pour la PACF.
Exemple 3.1.2.2 (AR(2) avec ç1
< 0 et ç2 < 0)
On se donne la série AR(2) noté
(X2t) avec ç1 = -0.6,
ç2 = -0.4. Autrement dit X2t =
-0.6X2t_1 - 0.4X2t_2 +
ct. On a le code R suivant:

Le code ci-dessus nous permet de visualiser l' ACF et la PACF
de la série (X2t) :

37
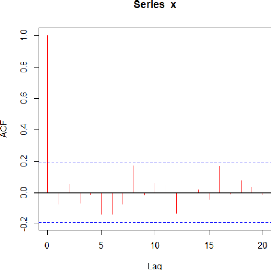
FIGURE 3.4 - La série X2 :
ACF(rouge) et PACF(vert)
D'une manière générale que pour un
processus AR(p), la fonction d'auto-corrélation décroit
exponentiellement et/ou sinusoïdalement rapide et pour la la fonction
d'autocorrélation partielle les pics sont significatifs pour les
premiers retards, les autres coefficients sont nuls pour des retards
supérieurs à p.
3.2 Estimation
Pour estimer l'ordre p, on utilise les
propriétés vues précédemment sur les formes des
autocorrélogrammes 'TX(h) ou des autocorrélogrammes
partiels. En particuliers pour les processus AR(p)
l'autocorrélogramme partiel s'annule à partir de p
( à gauche).
38
3.2.1 Estimation des paramètres d'une
modélisation
AR(1)
Considérons la série AR1
définie précedemment i.e AR1t =
0.6AR1t_1+ct. Pour estimer ses
paramétres, on a l'algorithme suivant :

Un estimateur de (ö1,
ó2) est donc ( àö1,
àó2) tel que
àö1 = 0.5697 et
àó2 =0.9677
Remarque 3.2.1.1 sigma2
estimated as, loglikelihood et aic représentent respectivement
la variance des erreurs, le maximum de vraisemblance et l'aic du modèle
donné en argument.
3.2.2 Estimation des paramètres d'une
modélisation
AR(2)
Considérons la série AR(2),
(X2t) définie précedemment c'est - à -
dire définie par X2t =
-0.6X2t_1 - 0.4X2t_2 +
ct . L'algorithme suivant nous permet de faire une estimation des
paramétres de ladite série.
Un estimateur de (ö1, ö2,
ó2) est donc ( àö1,
àö2,
àó2) tel que
àö1 =-0.6233
àö1 =-0.3976 et
àó2 =0.999
39

CHAPITRE4
|
Application du mo-
dèle AR sur l'indice
boursier S&P 500
|
4.1 Le S&P 500
Le S&P 500 (SPX) est un indice boursier basé sur
500 grandes sociétés cotées sur les bourses
américaines. Parmi ces sociétés on peut citer Nucor Corp,
Oracle Corp, Phillips 66, etc... . L'indice est possédé et
géré par Standard & Poor's, l'une des trois principales
sociétés de notation financière. L'indice S&P 500 a
été créé en 1950. Il a détrôné
le Dow Jones Industrial Average comme indice le plus représentatif du
marché boursier américain parce qu'il est composé d'un
plus grand nombre de compagnies et que sa valeur tient compte de la
capitalisation boursière des compagnies contenues dans l'indice. De son
côté, le Dow Jones Industrial Average est basé sur
seulement 30 compagnies. La pondération des valeurs au sein du Dow ne
s'effectue ni en fonction des capitalisations boursières, ni du flottant
(comme pour les indices francais), mais en fonction des cours de bourse. Une
variationd'un dollar dans la valeur de la plus petite compagnie de l'indice a
le même impact sur l'indice qu'une variation d'un dollar dans la valeur
de la plus grosse compagnie.
41
4.2 Présentation des données
On va utliser les données mensuelles de la série
S&P 500 datant du 19 Août 2005 au 17 décembre 2013, soit un
echantillon de 108 valeurs. Ces données ont été extraites
à partir du site de Yahoo France.

FIGURE 4.1 - moyennes mensuelles de S&P
500
4.3 Applications
Pour visualiser les allures de la s 'erie, de l' ACF et de la
PACF, on doit créer à partir des données du S&P 500,
la série X. L'algorithme de création de cette sèrie est
donné par :
42
4.3.1 Allure de la série S&P 500
Grâce à la commande ci-dessus, la série
S&P 500 s'illustre graphiquement par la figure suivante.

FIGURE 4.2 - Allure de la série S&P500
4.3.2 L'ACF et la PACF de la série S&P 500
Pour la PACF on a :
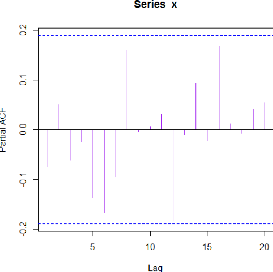
FIGURE 4.3 - PACF de la série
43
Et pour l'ACF on obtient:
44
FIGURE 4.4 - ACF de la série
On note ici pour l'ACF, un pic significatif de premier retard,
cela signifie donc que la série S&P 500 est correlé
positivement.
4.3.3 Estimation
Les algorithmes ci-dessous nous permettent d'estimer les
paramétres du modèle.
45


46
4.3.4 Choix du modèle
Pour choisir le modéle adéquat pour
modéliser la série, on doit selec-tionner celui qui a le plus
petit AIC. Pour cela on regroupe les resultats précédents dans le
tableau ci-dessous :
|
modèle
|
u2
|
logL
|
AIC
|
AR(1)
|
0.9782
|
-152.06
|
310.12
|
AR(2)
|
0.9758
|
-151.93
|
311.85
|
AR(3)
|
0.9720
|
-151.72
|
313.44
|
AR(4)
|
0.9712
|
-151.68
|
315.36
|
AR(5)
|
|
0.9530
|
-150.62
|
315.23
|
|
Ces résultats nous montrent que le modèle
AR(1) a le plus faible AIC. Donc il sera pris en compte pour
la modélisation de la série S&P 500.
47
CNCLUSIN
La réalisation de ce document nous a permis de savoir
bien appliquer la statistique dans le domaine de la finance, grâce
à ses différentes riches méthodes. Vu que les
séries de rendements financiers peuvent étre assimilées
à des processus autorégressifs donc aprés quelques
généralités sur les rendements financiers et sur les
processus stochastiques, le modèle autorégressif (modèle
AR) , y a été aussi développé.
Différentes techniques d'estimations et de prévisions avec ce
modèle y sont également traitées.
Nous avons profité de la dernière partie de ce
travail pour appliquer la théorie sur des données réelles
plus précisément sur l'indice boursier S&P 500. Et c'est
grâce au logiciel R que ces traitements de données ont eu
lieu.
Enfin, avec les méthodes développées, il
sera possible de les utliser afin de pouvoir les appliquer avec d'autres
données telles que le CAC40, etc...
48
Bibliographie
[1] Russel DAVIDSON et James G. MACKINNON : Estimation and
Inference in Econometrics. , New York,Oxford University Press,1994
p.874
[2] James DOUGLAS HAMILTON: Times Series Analysis.
Princeton University Press,1994 p.799
[3] Arthur CHARPENTER : Cours de séries temporelles :
Théorie et application. DESS actuariat et DESS mathématiques
de la Décision.
[4] Steven FORTIER, département de mathématiques,
Université de Sherbrooke: Les mod`ele MA, AR et ARMA
multidimensinnels : estimation et causalité. CaMUS 4,112-136.
[5] Arthur CHARPENTER : Modeles de prévision :
Séries temporelles ,15 mai 2012 UQAM, ACT6420,Hivers 2011
[6] Russel DAVIDSON et James G. MACKINNON (1993)
[7] Cryer et Chan (2008)
[8] Akaike (1969)
| 

