IV.3 Réalisation
Nous avons utilisé une plaquette perforée, avec des
pas de 2.4mm pour espacer les broches de composants.
Nous avons soudé les composants avec de l'étain. La
figure 4.3 montre la vue de dessous de la carte d'interface.
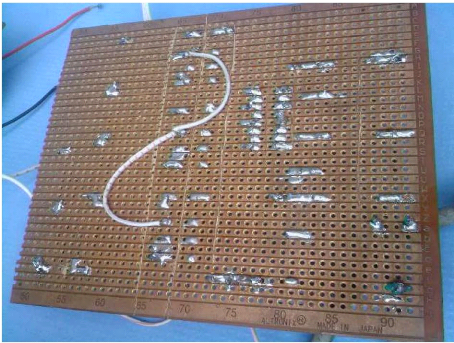
La figure 4.3 carte d'interface.
Lorsqu'on alimente le circuit, il faudra placer le
multimètre calibré en ohmmètre, sur les sorties de la
carte, en d'autres termes sur les bornes du potentiomètre, et brancher
le port série, sur un ordinateur, lancer le programme, puis
vérifier la disponibilité du port de communication série,
et enfin cliquer sur le choix de différentes vitesses et voir sur le
multimètre si la résistance change.
La figure 4.4 montre la carte sur laquelle nous avons
réalisé l'interface électronique.
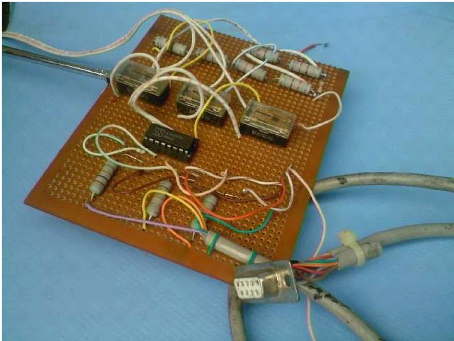
La figure 44 l'interface électroniqu
IV.4 RESULTATS OBTENUS
Nous avons fait nos essais qui se sont avérés
concluant car avons obtenu le vol stationnaire du modèle réduit,
à partir de la commande sur notre PC et nous avons réussi
à faire voler l'hélicoptère modèle réduit
sur un vol, à 10 mètres du sol.
La figure 4.5 montre l'hélicoptère modèle
réduit au sol.

La figure 4.5 l'hélicoptère modèle
réduit au sol. La figure 4.6 montre l'hélicoptère
modèle réduit en l'air.
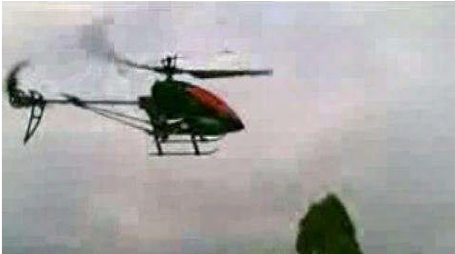
La figure 4.6 l'hélicoptère modèle
réduit en l'air.
IV.5 CONCLUSION
Dans ce chapitre nous avons donné de façon
concise, le fonctionnement du système de contrôle assisté
pour modèle réduit. Nous avons décrit la
réalisation de la carte interface du potentiomètre et nous avons
présente les résultats.
Conclusion générale
Tout au long de cette étude, nous avons parlé d'un
dispositif pour le contrôle assisté par ordinateur d'un
hélicoptère modèle réduit.
Au premier chapitre nous avons montré comment s'effectue
une émission radiofréquence,
Au deuxième chapitre, il a été question,
de la présentation des langages de programmation, puis nous avons
décrit le système tout entier. Au troisième chapitre et
enfin avons donné le fonctionnement du dit système au
quatrième chapitre.
Nous avons rencontré plusieurs difficultés pendant
la réalisation de notre système.
Causé par le mauvais état de nos composants
électroniques, d'une part et lors du développement, causé
par la difficulté d'obtention d'une librairie dynamique pour la gestion
des broches du port série.
Nous avons fait nos essais qui se sont avérés
concluant car avons obtenu le vol stationnaire du modèle réduit,
à partir de la commande sur notre PC.
Nous espérons que les facettes de vol que nous n'avons pas
exploité peuvent être étudies dans un avenir proche, par
les générations à venir.
Nous restons ouverts à toute proposition, à toute
amélioration.
REFERENCES BIBLIOGRAPHIQUES
[1] Alexandre Guidet, Programmation Objet en langage C++,
Ellipses, (ISBN 978-2- 7298-3693-1), 364 pages
[2] Aurélien Geron, Fatmé Tawbi, Pour mieux
développer avec C++, Édition DUNOD 1999, (ISBN
978-2-10-007348-1)
[3] Bjarne Stroustrup, Le langage C++, Pearson,
2000 [détail de l'édition]
[4] CARDON ALAIN, Modéliser et concevoir une machine
pensante, Approche de la conscience artificielle, Vuibert, 2004.
[5] HAROLD ABELSON ET GERALD JAY SUSSMAN, Structure and
Interpretation of Computer Programs MIT Press, 2001.
[6] MARTIN CAMPBELL-KELLY, Une histoire de l'industrie du
logiciel : des réservations aériennes à Sonic le
Hérisson, Vuibert, 2003.
[7] EINSTEIN AJ, HENZLOVA MJ, RAJAGOPALAN S, Estimating
risk of cancer associated with radiation exposure from 64 - slice computed
tomography coronary angiography, JAMA, 2007.
[8] TURING ALAN, GIRARD JEAN-YVES, La machine de
Turing, Les Ordinateurs et l'Intelligence, 1995.
[9] J.-L. LAURIERE, Eléments de programmation
dynamique, Collection Programmation, Ed. Gauthier-Villars, Paris, 1979.
[10] ALLIOT JEAN-MARC ET SCHIEX THOMAS, Intelligence
artificielle et informatique théorique, CEPADUES, 2002.
[11] EINSTEIN AJ, HENZLOVA MJ, RAJAGOPALAN S, Estimating risk
of cancer associated with radiation exposure from 64 - slice computed
tomography coronary
angiography, JAMA, 2007.
[12] HAROLD ABELSON ET GERALD JAY SUSSMAN, Structure and
Interpretation of Computer Programs MIT Press, 2001.
[13] J.-L. LAURIERE, Eléments de programmation
dynamique, Collection Programmation, Ed. Gauthier-Villars, Paris, 1979.
TABLE DES MATIERES
Epigraphe I
Dédicace II
Remerciements .III
Abréviations IV
Liste des figures et des tableaux V
Introduction général 1
CHAP. I GENERALITES SUR LA RADIOCOMMANDE 4
I.1 Introduction 4
I.2 Bref historique 4
I.3 Les ondes hertziennes 5
I.4 Emission d'une onde électromagnétique
6
I.5 Les spectre électromagnétique
6
I.6 Nature et propagation 8
I.8 La radiocommande 10
CHAP. II GENERALITES SUR LES LANGAGES DE PROGRAMMATION
17
II.2 L'informatique classique 17
II.3 L'évolution des langages 19
II.5 Classification des langages 20
II.6.1 Introduction 21
2.6.3 Histoire de C++ 22
2.6.4 La bibliothèque standard (C++ standard
library) 23
2.6.5 Fonctionnalités introduites par C++
23
2 .6.6 La programmation orientée objet en C++
24
L'encapsulation en C++ 25
Visual C++ 27
2.6.8 Fonctionnalités du langage 28
2.6.9 Caractéristiques de Visual Basic
28
2.6.10 Évolution de Visual Basic 29
2.6.11 Langages dérivés 31
2.6 .12 Performances et autres problèmes
32
2.6.14 L'interface de travail de Visual Basic 6.0
édition professionnelle 34
CHAP. III PRESENTATION DU SYSTEME 36
3.1 Introduction 36
3.3 Description du système 38
3.3.2 Présentation du bloc interface
41
3.3.3 Présentation du bloc RF du modèle
réduit ~~~~~~~~~~~~~~~~~~~~~~~~42
3.3.4
Présentation du bloc Programme ~~~~~~~~~~~~~~~~~~~~~~~ 42
3.4 Conclusion
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~42
CHAP.IV FONCTIONNEMENT ET REALISATION DU DISPOSITIF
46
IV.1 Introduction 46
IV.2 Fonctionnement du système 48
IV.3 Réalisation 49
IV.4 Résulta obtenue 50
IV.5 Conclusion
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~.52
Conclusion générale~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~53 Références
bibliographiques 54 Table des matières
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~.55
-' 57 -'
| 

