CHAPITRE 1
PRESENTATION ET MODELISATION
DU
PROTOTYPE
1. INTRODUCTION.
L'élaboration d'une commande performante et optimale
du moteur FINTRONIC ne peut pas se faire sans connaître, avec certitude,
les caractéristiques propres de la machine à commander. Ceci est
d'autant plus vrai que le moteur en question est un prototype. Pour cela, il
faut découvrir et percevoir l'aspect mécanique, magnétique
et électrique du prototype de façon à les traduire sous la
forme d'un ensemble d'équations mathématiques. Cet ensemble
formera ainsi un système d'équations différentielles
à variables d'état représentant le modèle
d'état du moteur.
2. PRESENTATION DU PROTOTYPE.
Pour justifier la nécessité d'une nouvelle
génération de machines à réluctance variable (MRV),
comme le moteur FINTRONIC, on a besoin de revenir sur les
caractéristiques principales des MRV de constitution cylindrique et
leurs propriétés.
2.1. Les machines à réluctance variable,
cylindriques (MRV cylindriques):
Ce sont des machines robustes [1][2]
démunies de balai et qui plus est, peuvent prendre des formes
bien différentes suivant l'utilisation que l'on veut en faire. Ce type
de machine est caractérisé par le circuit magnétique de
son stator et de son rotor qui est formé par un ensemble de dents dont
la saillance créée la réluctance variable. Cette
particularité permet de tirer partie d'une propriété
remarquable de cette structure:
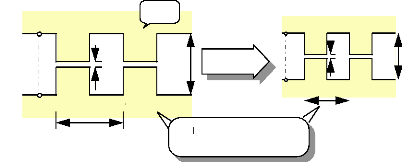
Si on applique une homothétie sur les dentures et
sur la force magnétomotrice (réduction des formes et des volumes
en proportion), on conserve les mêmes forces tangentielles
créatrices du couple moteur.
Ainsi, pour un même volume de matière
ferromagnétique, formant le circuit magnétique, il est possible
d'augmenter le couple moteur d'une MRV en augmentant le nombre de dents tout en
réduisant, en proportion inverse, les formes de la denture. On obtient
ainsi des moteurs à forts couples massiques pour des vitesses de
rotation faibles.
Stator
Dent
Stator
Entrefer
F
em
a
Homothétie
kF
ka
kem
(f.m.m.)
Rotor
Rotor
kb
b
Forces tangentielles
identiques
Fig. I-2.1 : Machines cylindriques homothétiques de
rapport k.
2.2. Les machines à réluctance variable
polydiscoïdes :
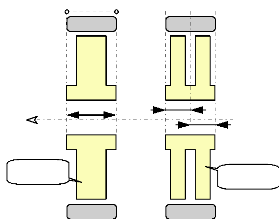
On applique la même propriété sur les
machines polydiscoïdes, à la différence près qu'on
exploite l'homothétie dans le sens axial du moteur. Ainsi, en augmentant
le nombre d'entrefer pour une même f.m.m. d'excitation, on augmente les
forces tangentielles de la même valeur et par conséquent, le
couple.
F
F/2 F/2
(f.m.m.)
L L/2
Axe
de
rotation
L/2
Monodisque
Multidisque
Fig. I-2.2 : Machines discoïdes à 1 et 2
entrefers.
Quelle que soit la machine utilisée, cylindrique ou
polydiscoïde, l'avantage sur l'homothétie est limité par la
réduction de l'entrefer. En effet, dans une certaine limite, l'entrefer
ne peut plus être réduit et l'homothétie n'est plus
applicable. De plus, la réduction de l'épaisseur du disque
provoque une tendance au collage qui est évitée par la seule
rigidité naturelle du disque en rotation.
| 

