CONSERVATOIRE NATIONAL DES ARTS ET
METIERS
CENTRE REGIONAL ASSOCIE D'AIX EN PROVENCE
MEMOIRE
Présenté en vue d'obtenir
le DIPLOME
D'INGENIEUR C.N.A.M.
en
ELECTROTECHNIQUE
par
Patrick BOIDIN
MODELISATION D'UN PROTOTYPE
ET
COMMANDE VECTORIELLE AVEC ET SANS CAPTEUR
MECANIQUE DU MOTEUR COUPLE
Soutenu le Avril 1996
JURY
PRESIDENT : RIALLAND J.F.
MEMBRES : LUCAS F.
BOUSSAK M. CREMET G. FINIDORI Ch. GAUTIER A. GRAS Ph.
HUGUES A.
CONSERVATOIRE NATIONAL DES ARTS ET
METIERS
CENTRE REGIONAL ASSOCIE D'AIX EN PROVENCE
MEMOIRE
Présenté en vue d'obtenir
le DIPLOME
D'INGENIEUR C.N.A.M.
en
ELECTROTECHNIQUE
par
Patrick BOIDIN
MODELISATION D'UN PROTOTYPE
ET
COMMANDE VECTORIELLE AVEC ET SANS CAPTEUR
MECANIQUE DU MOTEUR COUPLE
Les travaux relatifs au présent mémoire ont
été effectués au laboratoire
d'électrotechnique,
d'électronique de puissance et
systèmes EEPS de l'Ecole Supérieure d'Ingénieurs de
Marseille
(ESIM).
Les études et les travaux ont
été suivis par
Monsieur M. BOUSSAK, ingénieur
enseignant chercheur à l'ESIM
et
Monsieur Ch. FINIDORI, ancien
responsable du département EEPS à l'ESIM
sous la direction
de
Monsieur F. LUCAS, professeur principal du Conservatoire National des
Arts et Métiers d'Aix
en Provence.
Modèlisation d'un prototype et commande
vectorielle avec
et sans capteur mécanique du moteur
couple.
Mémoire d'ingénieur CNAM, Aix en Provence 1996.
RESUME :
De nos jours, les moteurs "couples" et plus
particulièrement les moteurs cylindriques à polyentrefer
concentrique (moteur de roue), sont reconnus comme étant des moteurs
performants. Néanmoins, ce type de moteur a besoin d'être
amélioré afin de le rendre plus compétitif dans un
marché européen de plus en plus exigeant dans les domaines de la
traction électrique et de la robotique. C'est pourquoi, la
société GEC-ALSTHOM MOTEURS NANCY, spécialisée dans
la fabrication de moteurs électriques, a conçu un prototype d'une
nouvelle génération de moteurs "couples" discoïdes à
réluctance variable et à aimants permanents alternés. Ce
moteur est capable de fournir un couple massique très important aux
basses vitesses : 5 à 15 N.m/kg pour 60 tr/min (300 N.m à 60
tr/min). Or, la structure modulaire de ce type de moteur, permet d'obtenir des
machines de constitution polydiscoïde, bien plus performantes. Un second
prototype, pouvant fournir cette fois ci 6900 N.m à 52 tr/min, a
d'ailleurs pris naissance dans les ateliers de GEC-ALSTHOM MOTEURS.
Pour exploiter les performances de cette nouvelle
génération de moteurs, nous avons élaboré, sur la
base du premier prototype cité, une théorie de commande
électronique de type vectorielle capable de piloter et de commander le
moteur. Cette étude est réalisée en tenant compte des
critères de simplicité, d'efficacité et de robustesse de
la commande.
Les difficultés rencontrées pour imposer un
capteur mécanique standard au prototype et les inconvénients de
ce capteur en matière de coût et de fiabilité, nous ont
motivés à élaborer une commande sans capteur
mécanique. Pour cela, on utilise un reconstructeur d'état du type
FILTRE DE KALMAN.
L'étude de la commande du prototype,
réalisée dans ce présent mémoire, est restée
théorique. Les résultats ont été
vérifiés uniquement par des simulations sous MATLAB-SIMULINK.
Néanmoins, nous avons apporté quelques recommandations sur
l'amélioration du prototype à partir des essais
expérimentaux et des observations physiques du moteur. De plus, à
la fin de ce travail, nous avons défini succinctement les moyens
matériels permettant de tester expérimentalement la commande
élaborée.
Mots-clés : Moteur discoïde -
Réluctance variable - Aimants alternés - Commande
vectorielle - Park - Modèlisation de moteur synchrone -
Filtre de Kalman -
Simulateur Matlab.
Keywords : Discoid motor - Variable reluctance -
Alternated permanent magnet - Vector control drive - Synchronous motor
modelisation - Kalman filter - Matlab
simulator.
REMERCIEMENTS
Je tiens à exprimer mes vifs remerdements à
tous les professeurs et enseignants du Conservatoire National des Arts et
Metiers pour leur devouement à enseigner à ceux qui, comme moi,
veulent poursuivre leurs etudes et ameliorer leurs connaissances
theoriques.
J'adresse mes respectueux et sincères remerdements
à Monsieur F. LUCAS pour m'avoir interesse par la
qualite de ses enseignements, m'avoir guide tout au long de ces etudes depuis
le cycle A et m'avoir redonner courage au moment oO il le fallait.
Je remerde aussi Monsieur Ph. GRAS,
ingenieur-enseignant au CNAM, pour sa patience à nous
enseigner les travaux pratiques que j'ai suivis pendant 3 annees, pour sa
gentillesse et pour l'aide qu'il a su nous apporter bien au-delà de son
travail.
Merd à Monsieur MATHON,
gerant-directeur de la sodete HEURTEY INDUSTRIES PROVENCE oO
je travaille et à Monsieur DEPLACE, mon chef de
service, d'avoir accorde mon conge formation et d'avoir supporte mon absence
durant cette annee de memoire.
Je remerde vivement Monsieur FINIDORI,
anden responsable du Departement ElectrotechniqueElectronique de
Puissance et Systèmes associés, de m'avoir accueilli au
sein de son equipe et de m'avoir fait confiance en m'accordant ce siet de
memoire. Mes remerdements vont aussi vers Messieurs Ph. ZANIN
et L.ROSS respectivement directeur et directeur
adjoint de l'Ecole Supèrieure d'Ingénieurs de
Marseille qui m'ont accepte et fait profite des moyens materiels de
l'ecole.
Je remerde Monsieur BOUSSAK de l'aide et
de toute la patience qu'il a su m'accorde dans l'encadrement de ce travail et
je remerde aussi toute l'equipe des enseignants et des technidens de
l'ESIM qui m'ont aides dans ma tâche et soutenus avec
toute la gentillesse qu'il fallait ; Madame S.BANGUET,
Monsieur Y.SERVET, Monsieur J.LEGELEUX,
Monsieur Ch.YVE, Madame A.CARLIN, Monsieur
B.DHALLUIN, Monsieur N.DIGRAZIA, Monsieur R.
CHEVEAUX et Monsieur J.M.LI.
Toute ma sympathie et une part de mes remerdements vont
vers Monsieur CREMET, Responsable du Service Recherche et
Developpement de GEC-ALSTHOM MOTEURS Nancy, qui a su
m'encourager dans ma tâche et surtout su me transmettre, sans aucune
retenue de sa part, les quelques "ficelles de la technique".Ses conseils m'ont
demontre la haute competence de la personne.
Merd à Monsieur Ph.FONTANA pour
m'avoir ecoute et conseille avec toutes les qualites de solidarite et de
competence que peut avoir un Cnamien comme lui.
TABLE DES MATIERES
Page
INTRODUCTION GENERALE
1
CHAPITRE 1 : 3
PRESENTATION ET MODELISATION DU
PROTOTYPE
1 INTRODUCTION. 5
2 PRESENTATION DU PROTOTYPE. 5
2.1 Les machines à réluctance variable,
cylindrique (MRV cylindrique) : 5
2.2 Les machines à réluctance variable
polydiscoïdes : 6
2.3 Les machines à réluctance variable
polydiscoïdes et à aimants 6
permanents :
2.4 Constitution du moteur FINTRONIC : 7
3 MODELISATION DU PROTOTYPE. 13
3.1 Conventions et hypothèses : 14
3.2 Mise en équations du moteur à l'étude
dans le repère (as, bs, cs) : 15
3.3 Problèmes liés à la résolution
des équations dans le repère (as, bs,
cs) : 18
3.4 Equations mécaniques : 19
3.5 Modèle du moteur dans le référentiel de
PARK : 20
3.6 Remarques sur la transformation de Park et du système
résultant : 25
4 CONCLUSION 27
CHAPITRE 2 : 28
ESSAIS ET VALIDATION DU MODELE
1 INTRODUCTION. 29
2 DETERMINATION NUMERIQUE DES ELEMENTS DU 29
MODELE.
2.1 Essai à vide du moteur en fonctionnement
générateur : 29
2.2 Essai avec les enroulements statoriques en court-circuit :
32
2.3 Essai à vide du moteur FINTRONIC en fonctionnement
moteur : 34
2.4 Essai de ralentissement du moteur fonctionnant à vide
: 35
2.5 Essai d'échauffement du moteur FINTRONIC : 38
2.6 Paramètres du modèle : 39
3 ESSAIS EN CHARGE EN FONCTIONNEMENT MOTEUR. 40
3.1 Remarques sur les essais en charges : 41
3.2 Résultats obtenus pour Uab=340volts et
Tu=138N.m : 43
4 SIMULATIONS EN BOUCLE OUVERTE ET VALIDATION 44
DU MODELE.
4.1 Modèle mathématique du moteur et valeur
numérique des paramétres : 44
4.2 Simulations en boucle ouverte : 46
4.3 Validation du modèle : 51
5 CONCLUSION. 51
CHAPITRE 3 : 53
COMMANDE VECTORIELLE AVEC CAPTEUR
MECANIQUE
1 OBJET. 54
2 PREAMBULE. 54
2.1 Le moteur synchrone : 54
2.2 Commande du moteur FINTRONIC, en courant ou en tension ? :
54
2.3 Principe de la commande en tension et de l'autopilotage du
moteur : 55
2.4 Contrôle par la tension du couple
électromagnétique : 56
3 MODELE D'ETAT DU MOTEUR ET CHOIX DES VARIABLES 57
D'ETATS
3.1 Définition et notations : 57
3.2 Choix des variables d'états : 58
3.3 Détermination du système d'états et
schéma fonctionnel : 60
4 ETUDE DE LA REGULATION DES COURANTS DE PARK. 62
4.1 Etude du découpleur linéarisant : 62
4.2 Autre solution de découplage : 66
4.3 Etude comparative des 2 découpleurs : 67
4.4 Boucle fermée avec correction sur les courants :
68
5 REGULATION DE VITESSE. 69
5.1 Choix d'une régulation de vitesse : 69
5.2 Schéma-blocs de l'ensemble
Moteur/Machine/Régulations : 69
6 ONDULEUR DE TENSION. 71
6.1 Généralités : 71
6.2 Onduleur à commande en M.L.I : 72
6.3 Commande en couple avec un onduleur de tension à
73
M.L.I./Simulations:
6.4 Commande en vitesse avec un onduleur de tension à
M.L.I./Simulation: 76
CHAPITRE 4 : 80
COMMANDE SANS CAPTEUR ET FILTRE DE
KALMAN
1 INTRODUCTION. 81
2 LE CAPTEUR DE POSITION. 81
2.1 Le capteur est son rôle : 81
2.2 Résolution du capteur : 81
2.3 Choix du type de capteur : 82
2.4 Le codeur rotatif incrémental : 82
2.5 Le codeur rotatif absolu : 82
2.6 Le résolveur : 82
2.7 Conclusion : 84
3. RECONSTRUCTION DE LA POSITION DU ROTOR. 84
3.2 Le reconstructeur et son principe, appliqués aux
systèmes linéaires : 84
4. RECONSTRUCTEUR D'ETAT EVOLUE DU TYPE « FILTRE 89
DE
KALMAN ».
4.1 Principe du filtre de Kalman : 89
4.2 Le filtre de Kalman associé aux systèmes
linéaires : 90
4.3 Le filtre de Kalman étendu aux systèmes non
linéaires : 93
5. APPLICATION DU FILTRE DE KALMAN. 96
5.1 Choix du référentiel pour le filtre de Kalman:
96
5.2 Détermination des équations du système
différentiel estimé dans le 97
repère ( a s ,p s )
:
5.3 Commande du moteur dans le repère
(as,bs,cs) : 100
5.3.a) Régulation des courants ias, ibs,
et ics avec compensation des f.e.m : 101
5.3.b) Générateur de références sur
les courants : 102
5.3.c) Synoptique de commande du moteur dans le repère
(as,bs,cs) : 104
5.4 Validation théorique (simulation) de la commande du
moteur avec filtre 105
de Kalman :
5.4.a) Commande du moteur en vitesse avec retour par le filtre
de Kalman : 105
5.4.b) Remarques sur les simulations effectuées : 111
5.5 Définition des moyens matériels pour les
essais expérimentaux : 112
6. CONCLUSION. 117
CONCLUSION GENERALE 118
122
143
141
150
ANNEXES
· ANNEXE 1: Essais expérimentaux et
validation du modèle. ESSAIS DU PROTOTYPE.
· ANNEXE 2 : Commande sans capteur mécanique
- Filtre de
Kalman.
QUELQUES NOTIONS SUR LES VARIABLES ALEATOIRES.
· ANNEXE 3: Commande sans capteur mécanique
- Filtre de
Kalman.
TRANSFORMATIONS DE CLARKE ET DE CONCORDIA.
· ANNEXE 4 : Commande sans capteur mécanique
- Filtre de Kalman.
SCHEMAS BLOCS SOUS SIMULINK ET MASQUE DE
S-FUNCTION DU
FILTRE.
FICHIERS "METAFILE".
Et Quelques photos
LISTE DES SYMBOLES UTILISES
a : Position de l'axe d de Park par rapport
à l'axe de la phase as.
i as i bs ics : Courants instantanés dans
les phases statoriques d'axes a, b et c.
ids i qs ios : Courants instantanés dans
les phases statoriques d'axes d, q et o.
i as i (3 s : Courants
instantanés dans les phases statoriques d'axes a et (3.
v as v bs vcs : Tensions instantanées aux
bornes des phases statoriques d'axes a, b et c.
v ds v qs vos : Tensions instantanées aux
bornes des phases statoriques d'axes d, q et o.
u ds u qs .
. Tensions de Park à l'entrée du
découpleur linéarisant.
v a s v (3 s : Tensions instantanées aux
bornes des phases statoriques d'axes a et (3.
e as e bs ccs
IFas IFbs IFcs :
Flux embrassés par l'enroulement successif des phases
statoriques d'axes
: Force électromotrice induite dans les phases du
moteur.
a, b et c.
IFds IFqs IFos : Flux
embrassés par l'enroulement successif des phases statoriques d'axes
d, q et o.
IFa aim baim : Flux instantané
créé par l'aimant du circuit inducteur, embrassé par
les
IFc aim enroulements de la phase
as, bs, cs.
IFdaim : Flux créé par les aimants
du disque rotor transposé sur l'axe d :

IFdaim = 3 2IFaim :Vraie valeur de
Park, non primée ? IF ?daim = IFaim .
IFaim
: Flux créé par les aimants du disque rotor.
~IFaim : Flux,
à valeur estimée constante, créé par les aimants du
disque rotor
Rs : Résistance d'une phase
statorique.
~Rs : Résistance, à
valeur estimée constante, d'une phase statorique.
Rm : Résistance
équivalente aux pertes magnétiques.
Icc : Courant de court-circuit dans les phases
statoriques (essai en cc).
Irm : Courant dû aux pertes
magnétiques.
L pa L pb Lpc : Inductance propre des
enroulements statoriques as, bs, cs.
|
~Ls
Ls
|
: Inductance synchrone, à valeur estimée
constante, du moteur. : Inductance synchrone du moteur.
|
|
Lq : Inductance synchrone d'axe q
(transversale) : L d = L q = Ls.
. an
Ld : Inductance synchrone d'axe d
(longitudinale) : L d = L q =
Ls.
:
Lms
lf
Is
[L
M
Inductance propre magnétisante des enroulements
statoriques.
: Inductance de fuites.
: Matrice des inductances statoriques :
[r


ms
ms
1 ?
I
J
l f + Lms -- 1 2 L ms -- 1 2
L
1 2 L ms l f + Lms --
1 2 L


1 2 L ms -- 1 2 L ms l f +
Lms
: Inductance de mutuelle entre 2 enroulements de phases
statoriques :
.
M = M ab = Mac = Mbc
n : Fréquence de rotation du moteur.
n
er
0
?
0
|
: Vitesse angulaire mécanique du rotor en rad/s :
n = 27c n
: Position électrique de l'inducteur par rapport au champ
tournant (Angle
constant en régime synchrone).
: Position électrique de l'inducteur par rapport à
l'axe fixe de la phase a, Oa.
: Position électrique estimée et optimisée
du rotor.
|
|
0mé c :
Position mecanique du rotor par rapport à l'axe fixe de la phase
a, Oa.
0lim : Temperature
limite d'echauffement des enroulements statoriques.
cos : Pulsation des courants
statoriques.
cor : Vitesse angulaire de
l'inducteur par rapport au champ tournant (Vitesse
nulle en regime synchrone).
co : Vitesse angulaire de l'inducteur par
rapport à l'axe fixe de la phase a, Oa.
co? : Vitesse angulaire du rotor estimee et
optimisee.
f : Coefficient de frottements visqueux.
f (t ) : Vecteur d'evolution du système,
fonction du temps.
Fx ( t , x ref (t)) :
Fonction "aux derivees partielles" de f ( x ref (t ), u (t
), t).
g (t ) : Vecteur d'application de la commande,
fonction du temps.
p et s : Operateurs de
Laplace.
N p : Nombre
de pas du moteur.
:
Tem
Tu
Tr
Trma
Couple electromagnetique moteur.
: Couple utile disponible sur l'arbre du moteur.
: Couple resistant total : Tr =Trma + Tr
0 + Trf. .
: Couple resistant dû à la machine
entraînee.
Tr0 : Couple resistant dit « residuel
» dû aux aimants.
Trf : Couple de frottements visqueux :
Trf = f co
Tth : Constante thermique d'echauffement des
enroulements statoriques.
Jm : Moment d'inertie des masses
tournantes du moteur.
Jr : Moment d'inertie des masses
tournantes de la machine à entrainer.
J : Moment d'inertie des masses tournantes du
moteur et de la machine :
J = J m + Jr.
k : Constante de vitesse de la machine entrainee
: Trma = k w 2 + T .
KT : Constante de couple en N.m/A.
KT = 3 2
Np?tFdaim avec tF?
daim = tF?aim.
K : Matrice de gains de correction à
coefficients constants.
Kk : Vecteur de gains de correction
au pas d'echantillonnage k.

Matrice de Park :
:
[ P]
3
2
r 1 1
L
cos 0 cos
sin0 -- sin
1 2 1 2 1 2
( 0 -- 2 7c 3 ) cos( 0 --4 7c 3)
( 0 -- 2 7c 3 ) -- sin( 0 --4 7c 3)
1
1
L
.
Pmé c : Puissance due aux pertes
mecaniques.
Pmag : Puissance due aux pertes
magnetiques.
(P : Angle de
dephasage entre le courant et la tension statorique.
5 : Angle interne de la machine. Dephasage entre
la f.e.m et la tension
statorique.
`P : Dephasage entre le courant et la f.e.m.
z : Coefficient d'amortissement.
Ld
Constante electrique d'axe d : Td =
Rs
.

x( t ) : Vecteur d'etat fonction du temps.
xk . Vecteur d'etat discrêt, au pas
d'echantillonnage k.
.
I . Vecteur d'etat à variables estimees
et optimisees.
.
ic : Vecteur d'etat à variables estimees
et corrigees.
Matrice derivee du vecteur d'etat.
8x : Vecteur "erreur" des variables
estimées sur l'état du système :

6' x = x
-x....
xref : Vecteur d'état de
référence.
C : Matrice de sortie du système à
coefficients constants.
CT : Matrice de sortie,
transposée.
v : Vecteur de bruits d'état sur le
système.
w : Vecteur de bruits de mesure agissant sur la
sortie.
vd : Vecteur de bruits d'état
sur le système à valeurs discrêtes.
u : Vecteur d'entrée du
système.
§
y

y
Vecteur de sortie du système.
§ Vecteur de sortie à variables
estimées et optimisées.
6y = y
-y.
Cy : Vecteur "erreur" des variables
estimées sur la sortie du système :
E? X } Espérance de la variable
aléatoire x.
§
D x
cxy
c xx
Variance de la variable aléatoire x.
Coefficient de covariance de 2 variables
aléatoires x et y.
: Matrice de variance-covariance d'un vecteur à
variables aléatoires:

? ?
? ? ?
x 1 x x
1 2 x x
1 3
? ?
? ? ? ? ?
x x
2 1 x 2 x x
2 3
xx ? ?
? ? ? ? ? ?
x x
3 1 x x
3 2 x 3 ?
0
·
·
X
X = ( X i - Xi).
Pk/k-1 . Matrice de variance-covariance de
l'erreur de la 1ère estimation des
.
variables d'état.
P k / k . Matrice de variance-covariance de
l'erreur de la 2ème estimation des
.
variables d'état.
P0 / 0 . Matrice de variance-covariance de la
confiance sur la première estimation
.
du vecteur d'état.
Rk : Matrice de variance-covariance
des bruits de mesures.
R0 : Matrice de variance-covariance
à valeurs initiales sur les bruits de mesure.
|
Qd(k_1)
Q0
|
:
:
|
|
(1)(k/k-1)
|
:
|
|
tin
|
:
|
|
Cdp
|
:
|
|
Cqp
|
:
|
|
Kp
|
:
|
|
Cdi
|
:
|
|
Cqi
|
:
|
|
ki
|
:
|
|
Cvp et Kvp
|
:
|
|
Cvi et Kvi
|
:
|
Matrice de variance-covariance des bruits sur le système
à variables discrétisées.
Matrice de variance-covariance à valeurs initiales sur les
bruits du système.
Matrice de transition du vecteur d'état de
k-1 à k.
Constante de temps du filtre du 1er de la consigne de
vitesse.
Gain de correction de l'action proportionnelle de la
régulation de courant d'axe d.
Gain de correction de l'action proportionnelle de la
régulation de courant d'axe q.
Gain de correction de l'action proportionnelle de la
régulation de courant. Gain de correction de l'action intégrale
de la régulation de courant d'axe d. Gain de correction de l'action
intégrale de la régulation de courant d'axe q. Gain de correction
de l'action intégrale de la régulation de courant
Gain de correction de l'action proportionnelle de la
régulation de vitesse. Gain de correction de l'action intégrale
de la régulation de vitesse
k : Constante de vitesse :
Trma = T + ko2.
T? : Consigne de
couple de la commande en couple du moteur.
Tn : Couple nominale.
AVANT PROPOS
ET
AVERTISSEMENT
Avant-propos et avertissement - Mémoire CNAM
Patrick BOIDIN.
.
Le moteur à l'étude est un prototype d'une
nouvelle génération de moteurs à structure discoïde
à réluctance variable et à aimants permanents
alternés. Ce prototype est classé dans la catégorie des
moteurs "lents" à fort couple massique (60tr/min et 5 à
15N.m/kg).
Ce moteur a été conçu par GEC-ALSTHOM
MOTEURS qui est une société spécialisée dans la
fabrication des machines tournantes électriques de grandes et de
moyennes puissances. Cette société, filiale de GEC-ALSTHOM S.A,
fait partie du groupe ALCATEL ALSTHOM et fonctionne actuellement au moyen d'un
effectif de 379 salariés qui sont répartis dans les
activités : recherche et développement, conception, fabrication,
ventes et après-vente. Le siège et l'usine de cette
société sont implantés dans la ville de NANCY.
Dans le cadre d'un contrat de partenariat "recherche et
développement technologique", entre cette société et
l'école supérieure d'ingénieurs de Marseille, on m'a
confié la mission d'étudier et de définir les moyens d'une
commande électronique du type "vectorielle" capable de piloter le
prototype. De plus, on m'a demandé d'étendre cette étude
à une commande électronique sans capteur mécanique.
Le groupe ESIM (Ecole Supérieure
d'Ingénieurs de Marseille) où ce sont déroulés les
études et les travaux, a été créée en 1970
à la suite de la fusion des trois Ecoles d'Ingénieurs
Marseillaises de l'EIM. Cette école, implantée sur le site du
Technopôle de Chateau-Gombert à l'Institut
Méditerranéen de technologie, est un centre de ressources et de
compétences scientifiques, techniques et technologiques.
INTRODUCTION GENERALE
L'évolution rapide et incessante des interrupteurs de
puissance et des micro-contrôleurs a multiprocesseurs a permis
d'améliorer considérablement les capacités et les
possibilités des nouveaux convertisseurs électroniques de
puissances. A raison de ces nouveaux moyens, les machines a réluctance
variable ont retrouvé, depuis quelques années, un regain
d'intérêt. Cet intérêt est devenu d'autant plus
important que les applications actuelles, telles que la traction
électrique et la robotique, demandent des moteurs lents, a forts couples
et a structure légère de surcroît. Or, seules les machines
a réluctance variable sont capables, par leur principe technologique, de
répondre a ces trois exigences. De nombreux chercheurs essayent de
compenser ce manque par des commandes sophistiquées telle que la
commande vectorielle de flux sur les machines asynchrones. Néanmoins,
les résultats ne sont pas totalement concluants aux basses vitesses et
beaucoup de travail reste a faire sur le sujet. Les machines a
réluctance variable, utilisées la plupart du temps en moteur pas
a pas, sont généralement limitées en puissance et
présentent des inconvénients qui réduisent leurs
performances. Ces inconvénients sont principalement : Une
instabilité de fonctionnement a certaines fréquences, une
limitation du couple au démarrage, des accélérations
modestes et autres inconvénients de ce genre. Or, l'idée venue de
GEC-ALSTHOM MOTEURS Nancy, a été de concevoir une nouvelle
génération de machines a réluctance variable, capables de
satisfaire tous les domaines d'application qui nécessitent des moteurs a
couples spécifiques élevés aux faibles vitesses.
D'où la réalisation du
Moteur discoïde à réluctance
variable et à aimants permanents
alternés (MDRVAP)
MOTEUR FINTRONIC.
Ce type de moteur a besoin, néanmoins, d'une commande
performante, simple a réaliser qu'il faut élaborer. C'est
principalement le but de ce mémoire. Cette commande, demandée de
type vectoriel, devra dans une seconde étape, se dispenser du
capteur mécanique qui s'avère, a priori, nécessaire a ce
type de moteur. Pour réaliser cette étude et les travaux qui s'y
rajoutent, Monsieur Gérard CREMET, de la société
GEC-ALSTHOM MOTEURS, a mis a la disposition du laboratoire
d'électrotechnique de l'ESIM, le prototype du moteur discoïde,
baptisé:
Compte tenu de la diversité de cette étude, nous
avons choisi de diviser la rédaction de ce mémoire en quatre
parties essentielles :
· La première partie :"Présentation du
prototype et modélisation", est
réservée a la présentation du prototype, que nous avons
découvert sous tous ses aspects et a l'étude du modèle
mathématique du même prototype. Cette phase a été
déterminante pour la suite de cette étude. En effet, une mauvaise
reconnaissance du moteur, au départ, pouvait très vite remettre
en cause toutes les théories développées par la suite.
J'ai été contraint a démonter le moteur en pièces
détachées a cause de quelques problèmes mécaniques.
Cette opération a permis de découvrir les moindres détails
du moteur et de mieux apprécier la technologie du prototype.
· La deuxième partie de ce mémoire :
"Essais et validation du modèle", traite des
différents essais, effectués sur le moteur, afin de
déterminer la valeur numérique des paramètres du
modèle. De plus, cette partie d'étude a permis de vérifier
la validation du modèle mathématique en comparant les
résultats théoriques avec les résultats
expérimentaux.
· La troisième partie : "Commande vectorielle
avec capteur mécanique ", présente, après un choix
préalable d'une technique de commande, la commande dans son ensemble et
ses
constituants en considérant le capteur mécanique
parfait. On présente, dans cette partie de mémoire et pour
différents cas et modes de fonctionnement (régulation en vitesse,
régulation en couple), une série de simulations sous le logiciel
MATLAB-SIMULINK.
· On consacre la quatrième et dernière
partie de ce mémoire : "Commande sans capteur mécanique et
filtre de Kalman", au développement théorique d'une commande
sans capteur du prototype utilisant un reconstructeur d'état du
type FILTRE DE KALMAN.
CHAPITRE 1
PRESENTATION ET MODELISATION
DU
PROTOTYPE
1. INTRODUCTION.
L'élaboration d'une commande performante et optimale
du moteur FINTRONIC ne peut pas se faire sans connaître, avec certitude,
les caractéristiques propres de la machine à commander. Ceci est
d'autant plus vrai que le moteur en question est un prototype. Pour cela, il
faut découvrir et percevoir l'aspect mécanique, magnétique
et électrique du prototype de façon à les traduire sous la
forme d'un ensemble d'équations mathématiques. Cet ensemble
formera ainsi un système d'équations différentielles
à variables d'état représentant le modèle
d'état du moteur.
2. PRESENTATION DU PROTOTYPE.
Pour justifier la nécessité d'une nouvelle
génération de machines à réluctance variable (MRV),
comme le moteur FINTRONIC, on a besoin de revenir sur les
caractéristiques principales des MRV de constitution cylindrique et
leurs propriétés.
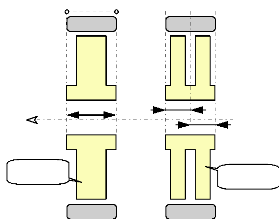
2.1. Les machines à réluctance variable,
cylindriques (MRV cylindriques):
Ce sont des machines robustes [1][2]
démunies de balai et qui plus est, peuvent prendre des formes
bien différentes suivant l'utilisation que l'on veut en faire. Ce type
de machine est caractérisé par le circuit magnétique de
son stator et de son rotor qui est formé par un ensemble de dents dont
la saillance créée la réluctance variable. Cette
particularité permet de tirer partie d'une propriété
remarquable de cette structure:
Si on applique une homothétie sur les dentures et
sur la force magnétomotrice (réduction des formes et des volumes
en proportion), on conserve les mêmes forces tangentielles
créatrices du couple moteur.
Ainsi, pour un même volume de matière
ferromagnétique, formant le circuit magnétique, il est possible
d'augmenter le couple moteur d'une MRV en augmentant le nombre de dents tout en
réduisant, en proportion inverse, les formes de la denture. On obtient
ainsi des moteurs à forts couples massiques pour des vitesses de
rotation faibles.
Stator
Dent
Stator
Entrefer
F
em
a
Homothétie
kF
ka
kem
(f.m.m.)
Rotor
Rotor
kb
b
Forces tangentielles
identiques
Fig. I-2.1 : Machines cylindriques homothétiques de
rapport k.
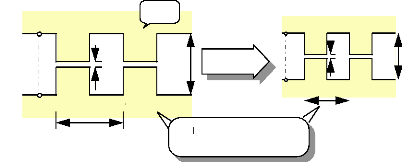
2.2. Les machines à réluctance variable
polydiscoïdes :
On applique la même propriété sur les
machines polydiscoïdes, à la différence près qu'on
exploite l'homothétie dans le sens axial du moteur. Ainsi, en augmentant
le nombre d'entrefer pour une même f.m.m. d'excitation, on augmente les
forces tangentielles de la même valeur et par conséquent, le
couple.
F
F/2 F/2
(f.m.m.)
L L/2
Axe
de
rotation
L/2
Monodisque
Multidisque
Fig. I-2.2 : Machines discoïdes à 1 et 2
entrefers.
Quelle que soit la machine utilisée, cylindrique ou
polydiscoïde, l'avantage sur l'homothétie est limité par la
réduction de l'entrefer. En effet, dans une certaine limite, l'entrefer
ne peut plus être réduit et l'homothétie n'est plus
applicable. De plus, la réduction de l'épaisseur du disque
provoque une tendance au collage qui est évitée par la seule
rigidité naturelle du disque en rotation.
2.3. Les machines à réluctance variable
polydiscoïdes et à aimants permanents :
En remplaçant les dents du rotor par des aimants
permanents, l'expression des forces tangentielles n'est plus dépendante
uniquement de l'entrefer magnétique mais de la combinaison de l'entrefer
mécanique avec l'épaisseur des aimants. Or, si on veut
réduire l'entrefer magnétique, tout en maintenant l'entrefer
mécanique constant, il suffit de réduire l'épaisseur des
aimants. Une étude complète de GEC-ALSTHOM MOTEURS a permis de
révéler tout l'intérêt d'une telle machine. Les
principaux avantages de cette machine par rapport aux MRV discoïdes sont
les suivantes [2] :
- "Les machines sont excitées et fonctionnent dans
les quatre quadrants
flux-ampères-tours : les flux mis en jeu sont alors
moins importants et les machines se prêtent mieux à un facteur de
puissance plus élevé".
- "La loi d'induction d'excitation est pratiquement
sinusoïdale."
- "Les efforts tangentiels obtenus peuvent être
supérieurs d'un facteur 2 à ceux des MRV."
- "Il est vraisemblable que la machine à aimants
permanents alternés s'avère silencieuse."
On précise que le prototype à l'essai est une
maquette monodisque d'une machine à structure polydiscoïde.
2.4. Constitution du moteur FINTRONIC :
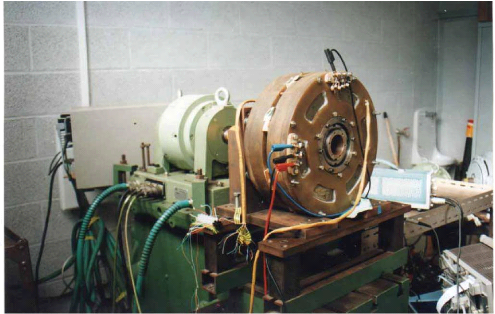
Fig. I-2.3 : Moteur FINTRONIC vu sur son banc
d'essais.
L'ensemble du gabarit fait environ 300 mm de diamètre,
150 mm d'épaisseur et 50 kg de masse. Les performances
électriques du moteur sont données pour 200 N.m nominale à
60 tr/min (64 Hz) et 300 N.m en pointe, soit un couple massique de 4 à
5N.m/kg.
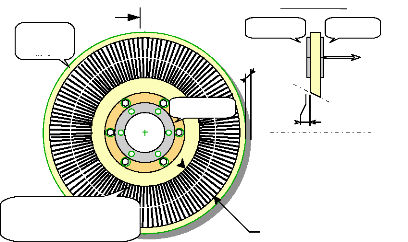
Trois parties principales constituent le moteur :
· Le rotor forme la première partie du moteur.
Il est constitué d'un disque en acier massif d'épaisseur 10,5 mm,
boulonné sur l'épaulement d'un arbre creux. Chaque face du disque
est munie de 128 éléments d'aimants au Samarium-Cobalt du type
"RECOMA 28", disposés sur 2 étages et collés
alternativement Nord/Sud. Les aimants ont une épaisseur de 1,75 mm, un
pas polaire de 5,625° et un angle d'ouverture légèrement
inférieur à 2,5°.
VUE SUIVANT F
F
Aimant Sud Aimant Nord
10,5
Flux
créé par les
aimants
arbre moteur
1,75mm
Axe de rotation
du rotor
ext :148,5mm int : 96mm
128 aimants
alternativement Nord/Sud
collés sur
chaque face du disque
disque
en
acier
Fig.I-2.4 : Rotor du moteur ; vue suivant l'arbre et vue
partielle suivant F.
· Les 2 disques "stator" forment la deuxième
partie du moteur. Chaque disque est constitué de 6 secteurs
(masse métallique formée de 9 plots) dont chaque secteur est
entouré d'un bobinage. Les bobinages sont connectés en
série et en parallèle de façon à constituer le
couplage étoile classique d'un moteur. Le tout est noyé dans une
résine assurant la légèreté et la solidité
de l'ensemble. La connection des 2 disques est assuré par des
broches.
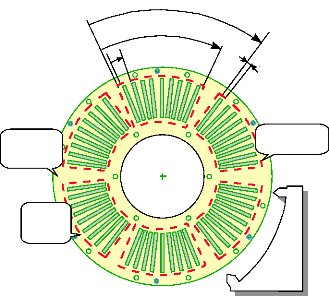
60°
50,63°
5,63°
2,81°
1
Structure
en
résine
3 '
2
plot statorique
Bobine
de phase
2 '
3
1'
Secteur
d' une
phase
Fig.I-2.5 : Disque "stator". Vue face en regard avec le
rotor.
Chaque enroulement de phase est constitué de 4 bobines
de secteur, branchées en série. Chaque bobine, formée de 3
brins en parallèle sur 79 spires, doit supporter 55 volts efficaces
à ces extrémités. Chaque phase est donc alimentée
sous 220 volts, soit une tension composée de 380 volts pour une
intensité nominale de 9,3A.
? Les 2 flasques d'extrémité forment la
troisième partie du moteur (culasses). Ils permettent de refermer, de
part et d'autre, les lignes de champs produites par le stator et le rotor.
Chaque flasque est constitué d'une tôle roulée
noyée, en partie, dans une structure en résine et plaquée
contre la face arrière de chaque stator. Une feuille isolante fine
sépare les pièces pour limiter les pertes magnétiques par
la circulation des courants de Foucault.
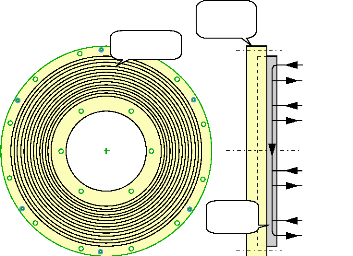
Structure
en
résine
Tôle roulée
Trajet
des
lignes de champs
Tôle roulée
Fig.I-2.6 : Flasque d'extrémité vu de face et de
côté.
On représente le moteur par une vue éclatée
et schématisée de la façon suivante:
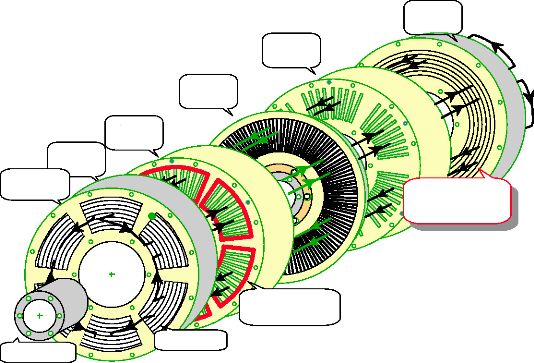
culasse
n° 2
stator
n° 2
rotor
stator n° 1
culasse
n°1
bornes de
raccordement
trajet des paquets
de lignes de
champ
bobine entourant
le secteur
tole roulée
Arbre moteur
Fig.I-2.7 : Vue schématique et éclatée
du moteur FINTRONIC.
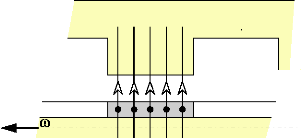
En se placant sur l'un des plots statoriques du moteur, les
lignes de champs induites par les courants au stator traversent : les aimants,
un entrefer mécanique constant et le disque "rotor" en acier
lisse. La perméabilité relative des aimants étant voisine
de l'air (1,05), telle que l'annonce le constructeur des aimants UGIMAG
(aimants à terre rare RECOMA 28), le déplacement du rotor impose
aucune variation de la réluctance sur le circuit magnétique.
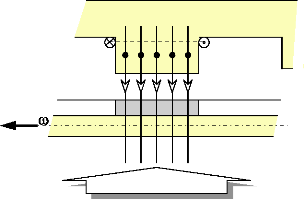
s
Pas de réluctance variable
N
Wi Stator
(fixe)
Rotor
s
(mobile)
Fig.I-2.8 : Représentation des lignes de champs
induites par le stator.
Par contre, les lignes de champs produites par cet aimant
traversent un entrefer variable (aimantation axiale) qui est dû
essentiellement à la présence des parties saillantes des plots
statoriques. On justifie ainsi l'appellation de
Moteur à réluctance variable.
s
N
Waim
Rotor
Stator
s
(fixe)
(mobile)

Réluctance variable
Fig.I-2.9 : Représentation des lignes de champs
induites par le rotor.
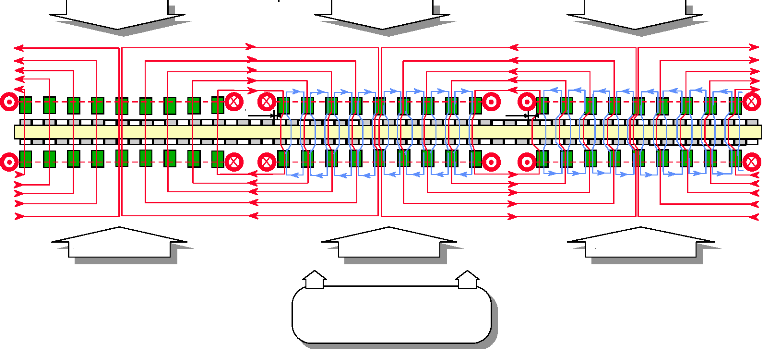
On représente le parcours d'une partie des lignes de
champs, traversant les pièces du moteur, par les 2 figures qui
suivent.
0° 120° électrique 240°
360°

Secteur 1 / phase 1 Secteur 1 / phase 2 Secteur 1 / phase 3
Secteur 1 / phase 1 '
1/3
Représentation de quelques
lignes de champs qui se
referment
par la culasse (non représentée)
Secteur 1 / phase 2 '
rotor
2/3
Secteur 1 / phase 3 '
Fig.I-2.10 : Trajet des lignes de champs sur 1 tour
électrique. Vue développée.
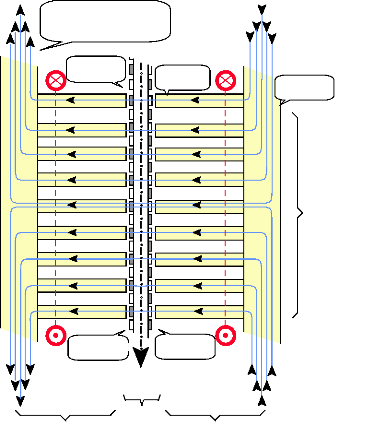
Disque
Disque stator n°1
Lignes de champs qui se referment
par les 4 plots et demi
statoriques
du secteur adjacent
Entrefer
mécanique
Aimant sud Aimant nord
Sens de déplacement
du rotor
rotor
Plot
statorique
Disque stator n°2
Culasse
Secteur comprenant
9 plots
statoriques
Fig.I-2.11: Trajet des lignes de champs sur 1 secteur de
phase. Vue développée.
Après cette présentation du moteur discoïde
à réluctance variable et à aimants permanents
alternés (MDRVAP), nous allons définir le système
d'équations différentielles, capable de représenter
mathématiquement le comportement physique du moteur.
3. MODELISATION DU PROTOTYPE.
Le moteur, tel que nous l'avons observé, s'apparente
à une machine synchrone à aimants permanents. On utilisera donc
les équations électriques et magnétiques de cette machine.
L'élaboration d'une commande efficace et dynamique de type
"vectoriel", nécessite d'utiliser le formalisme de Park. C'est
pourquoi, nous définirons notre système dans le
référentiel (d,q) de Park.
3.1. Conventions et hypothèses :
On suppose que la machine étudiée, répond
aux conditions d'étude suivantes :
· Enroulement multipolaire.
· Absence de saturation dans le circuit
magnétique.
· Absence d'effet pelliculaire.
· f.m.m. supposée sinusoïdale. On ne
considère que le premier harmonique d'espace de la distribution de
f.m.m.
· Le rotor tourne positivement dans le sens
trigonométrique.
· Par convention, l'induit (stator) est
considéré comme un récepteur.
· Le rotor est à pôles lisses et à
entrefer constant.
· On néglige les amortisseurs.
· L'axe Oq est en avance sur l'axe Od.
· Un courant positif génère un flux
positif.
· Une f.e.m. positive fait circuler un courant positif.
· On néglige les pertes magnétiques.
· Le flux inducteur, créé par les aimants,
est aligné suivant l'axe du rotor.
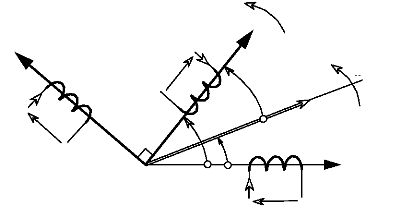
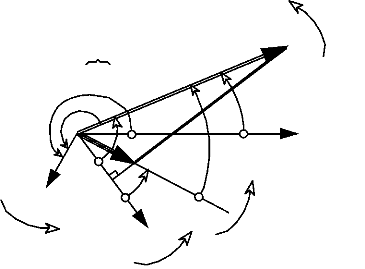
La construction vectorielle, telle que nous la présentons
par la figure I-3.1, est très importante et servira de base à
toute l'étude sur le moteur.
d
7
ids
q
iqs
vds
Axe
du
rotor
(0
(Fixe)
as
(0
ias
-->
? aim
vqs
O
a + a 0
? ? ? 0
vas
Fig.I-3.1 : Construction vectorielle avec l'axe d non
aligné avec l'axe du rotor.
Pour t=0 = a = et 0 = .
L'angle y correspond au décalage entre l'axe d et l'axe
du
0 0
rotor. Nous verrons, par la suite, qu'il faut caler ces 2 axes
entre-eux de façon à obtenir
7 = 0 soit
a = 0 . Ainsi, la matrice de Park fera intervenir uniquement
l'angle 0. Il est
important de préciser que les 2 enroulements
représentés sur les axes d et q, sont purement fictifs. Les
grandeurs engendrées par ces enroulements, seront créées
et évolueront par l'intermédiaire d'un algorithme
numérique. La position initiale du rotor est l'élément
indispensable au bon fonctionnement d'une commande vectorielle et nous verrons
pourquoi, par la suite.
L'angle 0 correspond à la position du
rotor par rapport à l'axe fixe de la phase a
s.
3.2. Mise en équations du moteur à
l'étude dans le repère (as,bs,cs) [4] [5] [6]:
· La loi d'Ohm avec la convention récepteur du
circuit d'induit, s'écrit :
dP is
dt
v is =R s iis +
(I-1)
Rs
d'is
dt
+
d'Pas
dt
iis
Fig. I-3.2
L'inducteur est représenté vectoriellement par son
vecteur flux, d'amplitude supposée constante :
?
IP aim
Appliquée aux phases statoriques as,
bs, cs du moteur, on obtient les expressions :
v as = R s ias

?#177;
(Nibs 1 as
dt
cs
r
1
r
1
v bs = R s ibs
[
v
v
v
bs
1
L
i
i
i
d
dt
gi
bs
Wcs
T
1
as
[
I I
I
J
Rs
I =
J
bs
I+ J
cs
+
dIcs
dt
v cs = R s ics
Sous une forme matricielle, on a :
1
[ v abc ] s = R s [i abc is #177; dt [Tabc
j1
s
(I-2)
· Suivant l'hypothèse de base, c'est à dire,
le circuit magnétique non saturé, on peut lier les flux et les
courants par les relations suivantes :
Was = L pa i as + M ab
i bs + M ac ics + Wa aim Tbs = M ba i as + L
pb i bs + M bc ics + gib aim
Wcs = M ca i as + M cb i bs + L pc
ics +'Pc aim
Avec :
1
3 + 00
tpa aim .tPaim cos(COt +
90)
cos(o)t--
cos(o)t--
2 7c 3+90)
4 7c 3+90)

?
Tb aim = Taim
?
NIc aim =
tilaim
(I-3)
D'après la forme et la constitution du rotor que nous
avons décrit précédemment, il est possible de
considérer la machine comme étant à pôles lisses et
à entrefer constant. On peut écrire :
· L pa = L pb = L pc = Lp :
constante (valeur qui ne dépend pas de la position du
rotor).
· M ab = Mbc = Mac = M:
Mutuelle à valeur constante valeur qui ne dépend pas de
la position du rotor.
En tenant compte de cette précision, on peut mettre les
relations précédentes sous la forme matricielle suivante :

? ? cos ? ?
? ?
aim 0
as
i
i
i
?
1 ?
?
? ?
+
Taim
r 1
[
bs
i ?
?
? ?
?
r
[
Taim
cos(O t -- 4 7C 3 + 90
1
?
?
? ?
cs
Tas
F
1
?? bs ? ? tics
r ? ?
L
p
t ? ?
?
cos( ? t ? 2 3
? ?
? 0 ) ?
? ?
L p M M
M L p M
M M L
(I-4)
Sachant que :
L p = l f + Lms et
M = -- 12 Lms
·
·
Taim
?
Taim
i
i
i
as
1 ?
?
? ?
+
bs
r
[
r ? ?
L
cs
L'expression (I-4) devient :
rl f #177; Lms _ 1 2 L ms -- 1 2
Lms
? ?
? ? 1 2 L l L
? ? 1 2 L
? ms f ms ms ?
? ? ? 1 2 L ? 1 2 L l L
? ? ?
ms ms f ms




(I-5)
En l'absence d'un fil neutre relié à la terre, on
a:
? ? cos( ? ?
t ? ?
aim 0 )
?

cos( ? t ? 4 3
? ?
? 0 ) ?

cos( ? t ? 2 3
? ?
? ? ?
0 )
i as + i bs + i cs = 0 ?i bs + i cs =
--ias
Ce qui nous donne :
I
? 3 ? di as

0
9
2
273 3
e0)o)
47c
v R i
? ? ?
l L ? t
as s as f ms aim
?? ?? ? ? sin(
? ? ?
2 dt
? 3 ? di bs
v R i
? ? ?
?? l L ? ? ? t ?
bs s bs f ms ?? ? ? sin(
aim
2 dt
? 3 ? di cs
v R i
? ? ?
l L ? t
cs s cs f ms aim
?? ?
?? ? ? sin( ? ?
2 dt
(I-6)
En reprenant les relations (I-5) et en posant :


1 ?
? ? ? : Matrice des inductances statoriques.
ms
ms
l f + Lms -- 1 2 L ms -- 1
2L
1 2 L ms l f + Lms -- 1
2L


1 2 L ? 1 2 L l L
?
ms ms f ms
et
?
? ? abc ? aim ? aim
? ?
? ?
? ?
cos(cot + 00)
?
: Matrice des flux de l'inducteur.
cos( ? t ? 2 3
? ?
? 0 ) ?

cos( ? t ? 4 3
? ?
? ) ? ?
0
On obtient une forme matricielle :
[IF abc ? s ? ? s ? abc ? s ? ? abc ?
aim
? L i ?
(I-7)
On sait que :
?
d tP a
aim
e as
_ --
dt
liPaim
d cos(wt+ 90 ) d cos(cot +
90)
? ? ? ? as ? ? aim
e ? ? ? sin ? ?
? t ? ? 0
aim
dt dt
En raisonnant de la même façon pour e
bs et e cs, on obtient les
équations suivantes :
v as = R s i as +
Ls
v bs = R s i bs +
Ls
v cs = R s i cs +
Ls
I
1
?
L

as
di
as
bs
di
bs
di
cs
?
ecs
dt
Avec
3
e as = ct?
aim sin(cot+ 00)
e bs = Chaim sin(cot -- 2i 3+ 0 0
)
·
·

|
e cs = claim sin(cot -- 47c
|
|
3 + 00)
|
E ? ? ?? ?
aim
(I-8)
Soit en notation complexe:
Vs= R s I s +
jcoLs I s -- j OFaim
ou
Vs =RsIs +
jco(Ls Is --Taim)

(I-9)
On représente les relations précédentes sous
la forme vectorielle suivante :
Chapitre 1 : Présentation et Modélisation
du prototype - Mémoire CNAM Patrick BOIDIN.
.
?
90°
-->
Vs
cot
90 + cot
er
0
-->
co L s I s
cot + o s 0
as (Fixe)
(1)
?
?
Es
8
-->
IP aim
cot
?
-->
cot
Is
cot
9
Fig.I-3.3 : Diagramme vectoriel dans l'hypothèse de
Behn-Eschenburg.
On n'a pas représenté la chute de tension
résistive.
3.3. Problème lié à la
résolution des équations dans le repère (as,bs,cs) :
Si on remplace l'expression des flux dans les relations (I-2), on
obtient :
? v ? R ? i ? ? L ? d ? ? ? ? ? ?
d
? ? dt i ? ?
abc s s abc s s abc s abc aim
dt
(I-10)
Sachant que :
?
? ? abc ? aim ? aim
? ?
? ?
? ?
cos(cot + 90)
?
cos( ? t ? 2 3
? ?
? 0 ) ?

cos( ? t ? 4 3
? ?
? ) ? ?
0
on en déduit :
sin(wt + 90)
?
sin(wt - 2 7c 3+90 ) ?
sin(wt - 4 7c 3+90
?

?
: fonction du temps.

[Tabc]
=- cotlfaim
d
dt

aim
? ?
?
? ?
On reprend l'expression (I-10) pour la mettre sous la forme d'une
représentation d'état d'un système d'équations
différentielles que l'on connaît. On obtient :
sin (o)t+ 90) (wt-2 7c 3+90) (cot-4 7c 3+90)
? ?#177;R s [L ]--
s 1 [iabc ]s =[ns
1[vabc ]s
#177;(134faim [L]
1
?
?
? ?

d
dt
? 1
s
? ?
?
? ?
sin sin
(I-11)
? [ ( ) ] [ ] [ ( ) ] [ ( ) ] [ ( ) ]
dt X t + A X t = B t + C t
En supposant que la vitesse reste constante durant la
variation des courants (critère de linéarité), on a alors
un système différentiel linéaire du 1er ordre à
coefficients constants, au premier membre (en fonction du temps) et au second
membre, variable dans le temps. La solution particulière de ce
système est obtenue par la méthode de variation des constantes.
Cette méthode de résolution est coûteuse en temps et en
moyen de calcul (système à 3 équations). L'utilisation du
formalisme de Park contribuera peutêtre à améliorer la
résolution de ce système et simplifier la commande.
3.4. Equations mécaniques :
L'expression du couple électromagnétique, pour un
moteur multipolaire, est de la forme:
|
3
Tem = N p
2
|
?i i j - j i ?? ?i
|
(I-12)
Np correspond au nombre de pas du
moteur discoïde. L'équation du mouvement est de la forme :
d ?
) dt
T T J J em - r = ( m +r
(I-13)
?
Sachant que L = , on a :
Np
1
dw 1
dt ??
r
T T
( m + r )
? = N J J
p
em r ??
(I-14)
On peut émettre une remarque importante sur la
représentation physique du couple
résistant . En effet, ce
couple représente en réalité la somme de 3 couples qui
Tr
s'opposent à la rotation du moteur. Ils sont :
· Un couple résistant, dû aux frottements
visqueux que l'on notera Trf. Ces frottements sont
proportionnels à la vitesse et sont provoqués par les roulements
à billes, la circulation de l'air dans l'entrefer et le ventilateur de
refroidissement du moteur (absent dans notre cas). On a: Trf
= fw.
· Un couple résistant résiduel dû
essentiellement aux aimants dont les lignes de champs se referment selon la
règle du flux maximal et tendent à s'opposer à la rotation
du moteur. Ce couple est indépendant de la vitesse, on le notera
Tr0.
· Un couple résistant, dû à la
machine entraînée que l'on notera Trma.
On obtient ainsi une nouvelle expression :
1 ?
? N J
(
?? m ?
p
T em -- (Trma + T r f #177; T r 0 )
Avec
T rf = f co
te
T r0 = Cte

T rma = k o)2 ou k o)3 ou k a ou
Cs
(I-15)
3.5. Modèle du moteur dans le
référentiel de PARK :
Le principe consiste à convertir le système
triphasé précédent d'axes as, bs et
cs en un système diphasé d'axes d et q
équivalent. Compte tenu de la figure I-3.1, cette transformation aboutie
à la matrice de PARK [ P] :
(I-16) : [ P] =
1-
[
2
3


?
?
) ?
? ?
cose cos(9-- 2 7c 3 ) cos(9 -- 4 7c 3)


? sin ? ? sin( ? ?
? 2 3 ) sin(
? ? -- 4 7c 3



1 2 1 2 1 2
Matrice de PARK.
? ?
?
? ?
et sa matrice inverse :
(I-17) : [P]-1 =
cose --sin
i ?
?
? ?
0 1


cos(9 -- 2 7c 3 ) --sin(9 -- 2 7c 3 ) 1
cos(9-- 4 7c
3 ) --sin(9 -- 4 7c 3 ) 1
Matrice inverse de PARK.
Avec la matrice [ P] , il est ainsi possible de
passer d'un système à l'autre. Pour cela, on utilise les
transformations suivantes :
? ? ? ?? ? ? ? ? ? ? ?
i ? P i ? i ? P i
? 1
dqo s abc s abc s dqo s
? ? ? ?? ? ? ? ? ? ? ?
1
v P v ? v ? P v
?
?
dqo abc s abc s dqo
s s
? ? ? ?? ? ? ? ? ? ? ?
? 1
? ? P ? ? ? ? P ?
dqo abc s abc s dqo
s s
(I-18)
L'unicité de la matrice de transformation [
P] pour les tensions, les courants et les flux, nous
oblige à tenir compte des changements de variables suivants :
2 2
? ds
3 3
i i
? ? v ? ? v ? ? ?
ds ds ds ds ds
2 2
i i
? ? v ? ? v ? ? ? ? ?
qs qs qs qs qs qs
3 3
1 1
i i
? ? v ? ? v ? ? ? ?
os os ds os ds os
3 3
(I-19)
Il faudra faire ATTENTION que dans tout ce qui suit,
nous utiliserons
des notations non primées pour simplifier les
écritures (Sauf indication
contraire).
? Pour retrouver des vraies valeurs de flux et de tensions sur
les axes d et q, il faudra multiplier chaque résultat par 3
2 (les résultats sur les courants restent identiques).
A partir d'un calcul que l'on ne démontre pas, on obtient
:
i
i
i
vds
ds
1 ?
?
? ?
?
qs
[Rs]
+0)
v qs
1 ?
?
? ?
r I
[
F I
[
r I
[
os
v os
|
F I
[
|
'Yds
Tqs
Tos
|
1 ?
?
? ?
|
+
|
d
dt
|
r I
[
|
tPds
Tqs
Tos
|
1 ?
?
? ?
|
0 --1 01
?
1 0 0 ?
0 0 0 ? ?
(I-20)
On en déduit les équations de PARK :
dlds
+ ?
dt
dlidt qs v qs = R s iqs + +
v os = R s i os
(Attention aux valeurs primées)
EQUATIONS DE
PARK DU MOTEUR DISCOIDE A
RELUCTANCE
VARIABLE ET A AIMANTS PERMANENTS ALTERNES.
v ds = R s ids
colliqs
Wt
ds
+ dIos
dt
(I-21)
On sait que ? ? abc ? s ? ? s ? abc ? s ? ? abc ?
aim
? L i ?
On multiplie chaque terme par la matrice de PARK, ce qui nous
donne :
? ? ? ? ?? ? ? ? ? ?? ?
? P L i ? P
dqo s s abc s ? abc aim
(I-22)
On remplace [ iabc] s par [ idqo?
s ? ? ? ? ? ?? ? ? ? ? ? ? ?? ?
? P L P i
?1 ? P
dqo s s ? abc aim
dqo s
Après un calcul, on obtient pour le premier terme :
?
? ?
i ? 0
dqo s ?
?
l ? 3 2 L 0 ? ?
i
f ms ? dqo
f ?
? ? ? ? ? ?
0 0
1
s
0 0
l ?

l f + 3 2 Lms

? ? ?
L M
? 0 0
p
?
? ?? ? ? ?
P L i
s . abc
s
? ? 0 ? ?
L M
? 0
p
? ? 0 0 ? ?
L ? 2 M ? p
.
1
Avec L p = l f #177;
Lms et M = -- 2 Lp
(I-23)
r ?
? ?
L

Et pour le second terme :
[P ][Tabc ]aim
? ? 0 0 ?
aim ?
0 0 0 ?
0 0 0 ? ?
(I-24)
Remarque
importante:
Transposé sur l'axe d, le flux
créé par les aimants (déterminé par un essai) doit
être
normalement majoré du coefficient 3/2 (unicité de
la matrice de Park). On aurait donc:
? ???daim = ?aim
?
? ? daim ? 3 ? ?
aim
2
Pt
Etant donné que nous utilisions des valeurs non
primées, on en fera de même pour 'gdaim
.... ....
? D'après la nouvelle notation, on a :
lidaim = Taim

1 ?
?
? ?
l f + 3 2 Lms
ds
i
i
i
0 0
1 ?
?
? ?
?
qs
0 l f +3 2 L 0
ms
? ? ds
?
?? qs ? ? 'Fos
0 0
r
[
r
[
lf
os
L'expression des flux dans PARK est :
? ? ? ? ?
daim
? ? ?
? 0
? ? ?
? ? ? ? 0 ? ?
(I-25)
(I-26)
?
? i ?
ds
? ?
?i qs ?? ? i ? os ?
?
? ? L i ? ?
ds d ds daim
? ?
avec ? daim ? aim
? et
3
L d ? L q ? L s ? l f ? L ms L o ? l
2 et
Attention aux valeurs primées.
f
? ? ?
ds
? ?
?? qs ?? ? ? ? os ?
d
? ?
0 L 0 ? q ?
? ? 0 0 L ?
o ?
? L 0 0 ?
1 ?? 0 ?
0 ? ?
? ?
?
? ?
.
?
? daim
?
? L i
qs q qs
? L i
os o os
?
?
Ld : Inductance synchrone d'axe direct
(longitudinale).
Lq : Inductance synchrone d'axe en
quadrature (transversale). Ls : Inductance
synchrone.
En remplaçant Ilids , Wqs ,Ios
par leur expression dans les relations (I-21), on obtient :
v ds = R s i ds +
Ld
-- co L q i qs +
difdaim
dt
di ds
dt
Avec
L d = Lq
Le flux 'km est constant par rapport
au temps = Le dernier terme de l'expressionprécédente
s'annule.
?
?
I
ds
di
?
w
dt
di qs
dt
di os
dt
v ds = R s i ds +
Ld
v qs = R s i qs + Lq
v os
= R s i os + Lo
L q iqs
#177; wL d ids #177; W taim
(I-27)
D'après cette remarque, les deux
derniers termes de v qs correspondent à des
f. e.m de
rotation puisqu'elles sont créées par la rotation
d'un flux qu'il soit variable ou non. On pose :
e qs = W ( L d i ds #177;
lifdaim ) et eds =
Lq0) i
qs
v ds = R s i ds +
Ld
v qs = R s i qs +
Lq
v R i L
? ?
os s os o

ds
di
?
eds
dt
qs
di
+
eqs
dt
dt
di
os
avec
e ds ? L q ? i qs et e qs ? ?
? L d i ds ? ?? daim ?
1daim = +aim
et
3
L d = L q = l f + L ms L
o ?
2 et
(Attention : Ce sont en réalité toutes des
valeurs primées)
lf
(I-28)
A partir de ces expressions, on peut schématiser le
système de la façon suivante :
L d = l f + 3 2Lms
Lq = Ld = lf + 3
2Lms
i qs
vds
Rs
e qs = Ldco ids + CO
41 daim
ids
Rs
e ds = L q oiqs
v qs
ios Rs Lo =l
f
Fig. I-3.4 : Loi d'Ohm des circuits équivalents d'axes
d, q et o.
La puissance électrique instantanée, fournie par le
réseau et consommée par le moteur, est de la forme :
P e = v as i as + v bs i
bs + v cs ics
? En appliquant Park, on obtient la nouvelle expression :
|
3
P e = 2
|
( v ds i ds + v qs i qs + 2v
os i os )
|
Si on exprime la puissance en fonction des flux et des courants,
on obtient :
31-
e 2 L
P = IR s i ds 2 + ids
dtlj d ? d ?
1
I J
ds 2 qs 2 os
? i ? ? ? R i ? i ? i ? ? ? 2 R i ? 2 i
ds qs s qs qs qs ds s os os
dt dt dt
On organise chaque élément de l'expression pour
faire apparaître le terme correspondant à la puissance
électrique absorbée par le moteur et transformée en
puissance mécanique transmise à l'arbre du moteur (dernier
terme).
3 3 ? d ? d ? d ? ? 3
2 2 2 ds qs os
P ? R i
? ? i ? 2 i ? ? i dt i
? ? i ? ?
? i i ?
e s ds qs os ds qs os qs ds ds qs
?? 2 ?? ? ? ?
2 2 dt dt 2
On obtient ainsi :
3
? ?
T em ? Np iqs ds ? ids
qs
?? ? ?
??
2
(I-29)
L'expression peut se simplifier en remplaçant les flux par
leur expression. On obtient:
3
T em ? Np daim i qs
??
2
Il est très intéressant de constater que le
couple électromagnétique est directement
proportionnel au
courant i qs . On se retrouve donc dans les
mêmes conditions que le
moteur à courant continu.
Tem = Tq = KT iqs
avec
·
·
p'I`daim en N.m/A : Constante de
coupleet
Td = 0
3
K = 2N
T
(I-30)
3.6. Remarque sur la transformation de Park et du
système résultant :
Mise sous une autre forme et tenant compte que L
q = Ld , la transformation de Park permet
d'obtenir les relations très importantes suivantes :
di ds
dt
qs
R 1
? L i L v
s ? ? ? i
ds ds
d d

di
qs
dt
ce
? daim
R 1 1
+ s i qs = vqs --co i ds --
L d
L d L d
e ds =
e qs =
(L qs d i
?L i ? ? ? ? d ds daim
co
ce
?
? ? ?
3
T ? N ? i
em p daim qs
2 avec
tlidaim =aim
ce
dw
dt ?
f N p
J m +Jr
Np
? J m +Jr
(K T i -- T r 0 -- Trma)
(I-31) Attention : Ce sont en réalité des
valeurs primées.
? Sous une forme matricielle, on a :
d R
? ? ? ? ? ?
1
s
dt i ?
dq s L i ?
dq s L v dq
d
d
? i ?
qs
? ?
??
? ?
i ?? ??
ds daim
s


(I-32)
On remarque que les courants de Park sont
liés entre eux par la vitesse angulaire du
rotor Co.
Le couple électromagnétique étant indépendant du
courant ids, on peut
imaginer une loi de commande qui puisse maintenir ce courant
nul. On aurait ainsi le courant i qs qui
crée le couple, découplé du courant
ids qui crée le flux.
Remarques:
· En régime permanent, co = o s ?
Le système d'axes (d,q) tourne à la vitesse de synchronisme.
Toutes les grandeurs dans Park deviennent des constantes.
· L'annulation du courant ids
proposée précédemment, revient en définitive
à
? ?
maintenir le vecteur --
Es colinéaire avec le vecteur courant
I s . Dans certain ouvrage, on dénomme cette commande
par : « Commande à flux croisés ».
· Lorsque l'on aura besoin de déterminer
vectoriellement les courants ids et
iqs, il
sur les axes d et q.
?
suffira de projeter le vecteur Is
q
--)
I s
"Is =
( ?
i ds ? i qs
2 2
d
·
-->
-->
i qs
ids
Fig. I-3.5
· On pourra effectuer les mêmes projections du
vecteur flux et du vecteur tension à condition de tenir compte du
coefficient 2 3 qui nous a permis d'unifier la matrice de
Park. On rappelle que vds, vqs,
vos, Wds,
tqset 'Fos sont en
réalité des valeurs primées. Pour revenir aux vraies
valeurs représentatives des axes as, bs et
cs, il faut
3
multiplier les valeurs obtenues par 2 . D'une
autre façon, on pourra augmenter de ce
même coefficient le module des vecteurs uniques avant de
les projeter sur les axes d et q.
3
-->
-->
-3 3 -->
v = vi
qs 2
qs
--)
Vs
-->
vds
?
q
,
vqs
?
v ds ? ?
v ds
2
V
=
s
( v'ds 2 + v'qs2 ) = 2 3 (+)
Ts
d
= ( ? s ? ? ? qs ? ? ? ? ds ? ? qs ?
2 2 2
? d 2 2
3
Fig. I-3.6
Cette partie d'étude nous donne 2 systèmes de
représentation différente ; Le premier (I-11) dans le
repère (as,bs,cs) et le second (I-32),
dans le repère (d,q).
Or, dans les 2 cas, les équations différentielles
sont à coefficients constants avec les hypothèses de bases. = Le
changement de repère ne se justifie donc pas.
Dans les 2 cas, le second membre des 2 systèmes
correspond à des fonctions variables en fonction du temps. On se
retrouve donc avec le même type de problème. Par contre, quel que
soit le régime de fonctionnement (transitoire ou permanent), le second
membre du 1er cas varie toujours en fonction du temps. Dans le
2ème cas et en régime permanent, le second membre est
constant. = Le changement de repère se justifie. Le nombre
d'équations électriques, dans le système de Park, est
limité à 2 pour 3, dans l'autre cas. ? Le changement de
repère se justifie.
4. CONCLUSION.
"Tout problème physique, quel qu'il soit, peut
être ramené sous la forme d'un modèle mathématique
évolutif dans le temps."
Au moyen de cette réflexion, nous avons pu
définir, dans ce chapitre, un modèle mathématique, capable
de représenter le comportement physique du moteur FINTRONIC de
GEC-ALSTHOM MOTEURS Nancy. Reste maintenant à valider ce modèle
et c'est ce que nous allons faire dès le prochain chapitre. Le
changement de repère dans le référentiel de Park va nous
permettre d'élaborer une commande performante du moteur, appelée
:
Commande vectorielle.
CHAPITRE 2
ESSAIS EXPERIMENTAUX
ET
VALIDATION DU
MODELE
1. INTRODUCTION.
Dans cette partie d'étude, nous avons tout d'abord
déterminé par des essais expérimentaux, l'ensemble des
valeurs numériques définissant les éléments du
modèle. C'est à dire :
· La résistance de l'enroulement des phases du
stator : Rs .
· L'inductance synchrone du moteur :
Ls qui correspond aussi à l'inductance
synchrone d'axe d du référentiel de Park
Ld. Avec les 2 paramètres
précédents, on en déduit la constante électrique
statorique du moteur : ts.
· La f.e.m à vide, induite dans les phases du
stator et provoquée par la variation du flux créée par les
aimants du rotor : e 0 s . On en déduit le flux
maximal, produit par les
aimants : ??aim et la constante de couple du
moteur : KT.
· Le coefficient de frottement visqueux du moteur :
f .
· Le moment d'inertie des masses tournantes du moteur
(rotor) : Jm et d'en déduire la constante
mécanique du moteur, à vide : ' m0.
· La constante thermique d'échauffement du moteur,
compte tenu que le moteur est démuni de tout système de
refroidissement : tth.
· La température limite d'échauffement des
enroulements de phases : 0lim.
Ensuite et pour compléter les résultats obtenus,
nous avons émis une série de remarques sur le comportement du
prototype, face aux différents essais.
Pour finir ce chapitre et valider le modèle
mathématique du moteur, nous avons comparé les résultats
obtenus par des simulations, sous MATLAB-SIMULINK, avec les résultats
des essais.
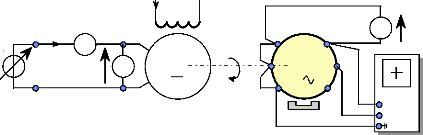
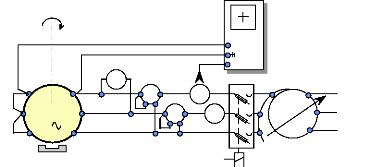
2. DETERMINATION NUMERIQUE DES ELEMENTS DU MODELE. 2.1.
Essai à vide du moteur en fonctionnement générateur
:
Cet essai permet de construire la caractéristique de
la f.e.m en fonction de la fréquence de rotation (Annexe 1) et d'en
déduire la valeur du flux dans l'entrefer, produit par les aimants. Pour
effectuer cet essai, nous entraînons le moteur FINTRONIC avec un moteur
à courant continu à excitation séparée.
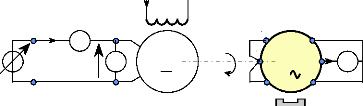
Ea 0s
V
1
I
1'
n
+
A
U
2'
V
2
M
GS
J= 0,8A
3
Chronomètre
3'
et
Tachymètre
3
Aimants P.
e a 0 s (t )
e b 0 s (t )
Fig. II-2.1 : Schéma de montage de l'essai à
vide en générateur.

Les résultats et les remarques sur cet essai, sont les
suivants :
· Sur une moyenne de 10 relevés, on obtient une
constante de vitesse de 0,67volts efficace par tour par minute. Soit :
?
|
0 ,6 7 volts / tr . min -1 = E a 0s = 40 ,2
volts pour n = 60 tr / min
|
(II-1)
· Pour un fonctionnement à vide, on a :

v as = e a 0 s ?Vs = E0 s =0) aim
co = 27c N p n
avec N p : Nombre de pas du moteur (64 dans
notre cas).
On en déduit la valeur maximale du flux produit par les
aimants et la valeur de la

constante de couple sachant que KT = 3 2
NpTdaim :
·?aim = 141 mWb soit
Taim = 99 ,7 mWb
KT = 13 ,5 N . m /
A
(II-2)
· Les ondes de tensions, obtenues sur les oscillogrammes,
sont quasiment sinusoïdales. Echelles : 20 volts/cm et 2ms/cm :
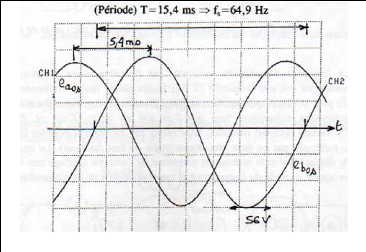
Fig. II-2.2 : Ondes de tensions. e a 0 s ( t ),
e b 0 s ( t) et e c 0s ( t) à n =61 tr/min
· Au moment de cet essai, on remarque que la
fréquence de rotation du moteur varie sensiblement et de façon
périodique. Cet effet néfaste (parasite) impose à la
machine des vibrations et des à-coups de couple qui nuisent au bon
fonctionnement du moteur. Ce phénomène se produit quelle que soit
la fréquence de rotation du moteur. A l'oscilloscope, on observe cet
effet parasite par l'intermédiaire de l'onde de tension induite au
stator.

La machine tourne à 14 tr/min (15Hz) soit à peu
prés au quart de sa vitesse nominale. La base de temps est de 0,5s par
cm.
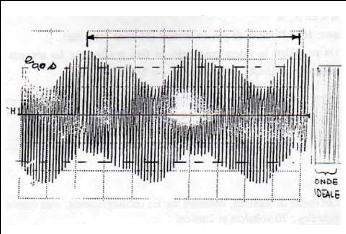
1 tour mécanique
Fig. II-2.3 : Oscillations parasites détectées
sur l'onde de fe.m.
La fréquence d'oscillation, constatée sur
l'oscillogramme, équivaut au demi-tour mécanique soit une
fréquence 32 fois moins élevée que la fréquence
électrique (2,2 Hz pour 69,3 Hz). Contrairement aux apparences, ce
phénomène n'est pas dû à des frottements
mécaniques bien que l'on soit en limite. Ceci est dû à des
forces d'attraction (axiales) parasites, provoquées par les aimants dont
les lignes de champs se referment par les plots statoriques (règle du
flux maximal). Le manque de rigidité du disque rotor et le manque de
constance de l'entrefer (réglage très difficile à mettre
en oeuvre = voile du disque) sont la cause principale de ce
phénomène.
Chapitre 2 : Essais expérimentaux et
validation du modèle - Mémoire CNAM Patrick
BOIDIN.
.
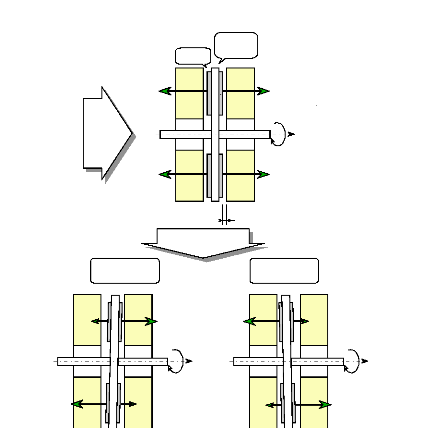
Stator
N°1
Stator
N°2
Les forces
d'attraction ne
sont
plus
équilibrées
Disque
rotor
Aimants
N
S
Stator
N°1
Stator
N°2
Entrefer
constant
Axe de rotation
S
N
Entrefer mécanique
Entrefer non constant
Position du rotor
0 = 00
Position du rotor
0 = 1 80?
Les forces
d'attraction s'équilibrent
Stator
N°1
Stator
N°2
Fig. II-2.4 : Explication du phénomène
d'oscillations sur la fréquence de rotation.
2.2. Essai avec les enroulements statoriques en
court-circuit :
Cet essai permet de déterminer la valeur de l'inductance
synchrone du moteur et d'en déduire la constante de temps
électrique.
J= 0,8A
V
M
Chronomètre
et
Tachymètre
n
I
+
A
U
1'
1
2'
GS
3
Icc
2
A
3
3'
Aimants P.
Fig. II-2.5 : Schéma de montage de l'essai en
cc.
· Des mesures sur la résistance des phases
statoriques, par la méthode voltampèremétrique, nous donne
les résultats suivants :
R s = 961 m ? à
20°C et 1,13Q à 80°C.
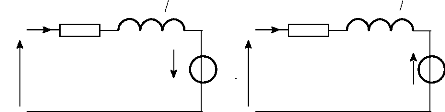
· En convention générateur, on a : V
E R I j L I
= -- -- co
s s
-- s -- s -- s -- s
(II-3)
? 2
0 ( ) ( )
2 2
E R I j L I ? ?
= -- -- co ? E R I
? ? L I
?
s s s s cc s c c
? ? ?
s cc cc

2
E ? 2 ? ( )
?
R I
L s ?
s s cc
?
Co I cc
(II-4)
soit dans la construction de Fresnel :
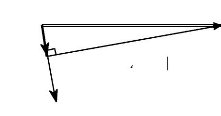
--)
s 0) I cc
90?
--)
Es
0
Fig.II-2.6
--)
R s I cc
--)
Icc
Sachant que w = 2 i N p n , on a
l'expression de l'inductance synchrone en fonction de la fréquence de
rotation (tr/s) :
L s
?
2 ?
1
N n I
p
.
2
E --
s
( )
R I
s cc
cc
2
(II-5)
· Par l'essai à vide, on a obtenu E a 0 s
= 40 , 2 volts pour n = 1 tr / s. Quelque soit la
fréquence de rotation du moteur, l'essai en court-circuit nous donne :
I cc = 1 ,8 6 A. D'où,
L'inductance synchrone correspond à :L s = 53
,7 mH
(II-6)
L s
? La constante de temps électrique du moteur
'rs = est de 47,5 ms. Cette valeur
est
R s
importante, comparée à celle obtenue pour un
moteur classique de même puissance qui est de quelques ms seulement.
2.3. Essai à vide du moteur FINTRONIC en
fonctionnement moteur :
Cet essai permet de déterminer les pertes
mécaniques et d'en déduire le coefficient de frottement visqueux
du moteur. Tous les essais sont réalisés sous une alimentation de
tension à 50 Hz pour une fréquence nominale de 64 Hz.
Aimants P.
Marche/Arrêt
n = 46,8 tr / min
v a 0 s (t ) i a 0 s (t )
1'
1
U
W
I
20A
220V-3ph
Réseau
N
2'
MS
3
2
W
I
3'
3
Régulateur d'induction
Fig.II-2.7 : Schéma de montage de l'essai et vide en
moteur.
· En prolongeant la courbe de la caractéristique
U 2 i--> Pmag + Pmé ca,
au point
d'abscisse égal à zéro (Annexe 1), on
obtient les pertes mécaniques. Elles sont supposées constantes
par rapport à la tension et sont proportionnelles au carré de la
vitesse mécanique. On en déduit le coefficient de frottement
viqueux f :
Pm
f -- LIé 2ca et
Pmé ca = Tfr n ? f = 1 ,96 N . m / rad .
s-1(méca)
Coefficient de frottement visqueux.
mé ca
ou f -- ?
2 et Pmé ca = Tfr ( 27c
n) = f = 0 , 205 N. m / tr. min -1
P
(2 7c n)
2 et Pmé ca = Tfr (0)
Np) = f = 0 ,0306 N. m / rad .
s-1(élec)
mé ca
ou f --
P
(o) Np)
(II-7)
· Pour effectuer cet essai, on couple la machine sur le
réseau par la méthode habituelle : Moteur à courant
continu et lampes de mise en phases sur le réseau. Le moteur à
courant continu entraîne la machine à 47 tr/min. Ensuite, elle est
couplée au réseau, par l'intermédiaire d'un
régulateur d'induction réglé à l'avance à
une tension composée de 115 volts. En fonctionnement
générateur, la machine fournit entre les 2 bornes de son stator,
une tension composée de 55 volts.
? La machine se couple au réseau sans problème
et fonctionne en moteur.
Dans un deuxième temps, on tente de démarrer le
moteur en forçant sa rotation à la main.
? Le moteur s'accroche au réseau sans et-coups, ni
problème. La fréquence de synchronisme du moteur est très
facilement atteinte et la main.
Pour finir, nous tentons de demarrer le moteur sous 115V en
direct et sans aucune aide exterieure. L'essai est concluant et le moteur
démarre à chacune de nos tentatives. Il en est de même
pour tous les essais effectues.
? Le moteur est apte à démarrer en direct sur
le réseau.
· La tension limite de decrochage du moteur, à vide,
se situe à environ 110 volts soit une tension de phase de 63,5 volts.
· Le moteur vibre sensiblement pour des tensions elevees,
voisines de la tension nominale.
· On suppose que les pertes magnetiques sont
proportionnelles au carre de la tension (droite ideale sur la caracteristique
en annexe). On en deduit le coefficient de proportionnalite :U
ab = 67 , 6 . 103 --> Pmag =
419 W = k=6,20.10 -3 W/volts2.
De 0 à 283 volts, on peut effectivement considerer
cette proportionnalite comme
realiste. Au-delà, il faut reconsiderer
cette hypothèse, il suffit de comparer les
courbes de la
caracteristique U 2 i--> Pmag
+ Pmé ca, en annexe 1, pour s'en convaincre.
· Le couple de frottement visqueux correspond à :
Tfr = 9 ,5 7 N . m
2.4. Essai de
ralentissement du moteur fonctionnant à vide :
Connaissant le coefficient de frottement visqueux
f, cet essai permet de determiner le moment d'inertie des
masses tournantes du moteur, à vide.
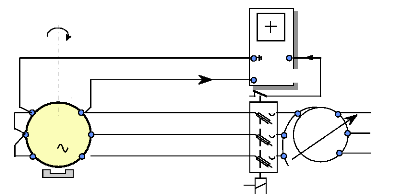
220V-3ph
Réseau
2
2'
N
3
3'
Aimants P.
Marche/Arrêt
n(t0 ) = 48tr/min
n(t1 ) =0tr/min
MS
3
Synch
e a 0 s (t 0 à
t1)
1'
1
20A
Régulateur d'induction
Fig. II-2.8 : Schéma de montage de l'essai de
ralentissement du moteur.
· e a 0 s ( t) dans l'intervalle de temps
compris entre t0 (correspondant à n = 48 tr /
min) et t1 à n = 0 tr / min
:
Echelle : 20ms/cm
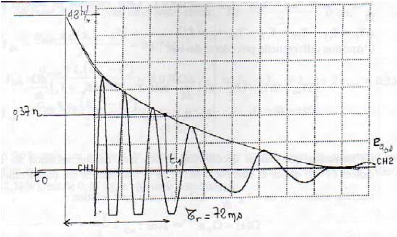
Fig. II-2.9 : Relevé de l'oscillogramme
e a 0 s (t ).
· Le niveau de tension aux basses vitesses, fourni par
la dynamo-tachymétrique, est trop faible pour obtenir des mesures
significatives. De plus, les à-coups de couple ont tendance à
transformer le signal continu du capteur, en un signal modulé
inexploitable. Or, pour réaliser cet essai, on décide d'observer
l'évolution de la f.e.m aux bornes d'une phase du moteur dans son
fonctionnement générateur et en phase de
décélération.
· En régime dynamique, le système
mécanique, constitué par un moteur accouplé en direct sur
une machine, est régi par l'équation différentielle
suivante :
d ?
dt
T T ( J J )
em ? r m + r
(II-8)
Nota : Généralement, le premier terme de
l'expression est non linéaire.
Pour supprimer la non-linéarité du premier
terme, on linéarise le système autour d'un
point
fonctionnement sur la vitesse : ?0 . Pour cela, on
découpe la période de
décélération en intervalles de temps
A t donnés. On obtient ainsi [8] :
· A t0=0, la condition initiale de l'essai
?0
? 1
·

A t 1 = A t , T _ T ( J J ) t
= +
em 0 r 0 m r A
Q 2
·

A t 2 = t 1 + A t , T _ T ( J J )
t
= +
em 1 r 1 m r ?
· A t 3 = t 2 + At ...
Dans de nombreux cas, la variation du couple moteur est
supposée constante autour de son point de fonctionnement et la variation
du couple résistant, proportionnelle à la vitesse. D'où
:
ATem = Tem 1 -- Tem 0 = Tem 2 --
Tem1 =... = cte=T. Cette variation ne dépend pas de
n. ATr = Tr 1 -- Tr 0 = Tr 2 --
Tr1 =...= fn
L'équation différentielle précédente
devient :
AT em -- AT r =
|
? ? ??
J J
? soit T f
? ? m ? r
? ? ?
J J
m r
At
|
di2
dt
|
|
|
|
|
n(t = 0 ) = n 0
(II-9)
En supposant que chaque décélération a
lieu sans aucune variation du couple moteur
(T=0) et que le moment d'inertie
de la machine est nul (décélération sans machine
entrainée), on a J
|
m
|
di2
dt
|
+ fn = 0, qui a pour solution :
|
|
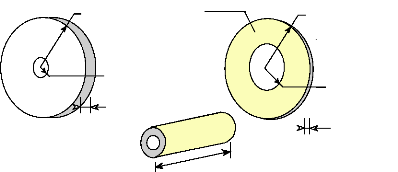
Taux d'occupation des aimants
tocc = 76%
R=155 mm
aacier = 7850 kg / m3
(Densité)
r=30 mm
Ra=149 mm
caim = 8300 kg / m3
(Densité Récoma 28)
+ 2 x
ra=122 mm
e=10,5 mm
R=80 mm r=30 mm
+
Acier
L=141 mm
ea=1,75 mm
Jm
? ? t ? ? ? e ? t mo
? avec ?m 0 ? .
0
f(II-10)
On en déduit ainsi :
n(t = T m 0 ) = 0 ,3 7 n0
(II-11)
L'essai nous donne t m 0 = 72 ms. Or, sachant
que f=1,96 N.m/rad.s-1, on obtient:
J m = f T = 0 ,14 1 kg
.m2 : Moment d'inertie des masses tournantes du
moteur
FINTRONIC.
(II-12)
· Vérification du résultat
précédent par un calcul approximatif :
On sait que le rotor est constitué d'un disque
métallique muni d'un arbre creux et de 2 couronnes d'aimants
collées sur les faces du disque.On peut donc calculer le moment
d'inertie de l'ensemble.
Fig.II-2.10 : Les éléments de constitution
du rotor.
Moment d'inertie pour un cylindre creux : J = an
e (R 4 -- r4). D'où,
2
J dis
J aim
J arb
?
aaciern
aim a
? ?
aaciern
e
e R-- r4)
L (R 4 - r4)
2 = 0 ,0746
(R a 4 -- ra4)
2 = 0 ,070
2 ti occ= 0 ,0047
? ?
??
?
?
?
? ?
??
J J J
? ? 2 J ? 0 154
, kg m
.
m isc arb aim
A 10% prés, on retrouve le même résultat.
Par comparaison, le moment d'inertie d'un moteur asynchrone, pouvant fournir un
couple nominal de 95N.m à 750tr/min (7,5kW), est de 0,13
kg.m2 (donnée constructeur).
2.5. Essai d'échauffement du moteur FINTRONIC
:
Cet essai permet de déterminer :
· La température limite
elim atteinte par les enroulements statoriques pour
un régime de fonctionnement permanent donné.
· La constante thermique tith.
Chaque enroulement des 12 secteurs est équipé
d'une double sonde de température du
type thermo-résistance au
platine PT100n. On utilise 2 de ces sondes pour effectuer
cet
essai. Une table de conversion conforme à la norme permet
de convertir les valeurs de résistance en valeurs de température
(en degrés Celsius).
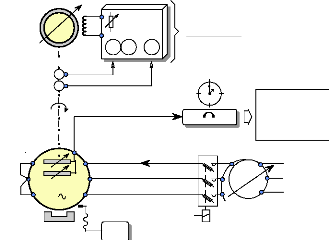
n = 46,8 tr / min
N
3'
2'
1'
Aimants P.
Frein
ea
Poudre
MS
3
e
T
n
Résistances variables par
sonde
platine
3
1
Thermomètre
2
oC
Tu Pu n
Trma
I = 9A
Marche/Arrêt
Dispositif de Frein : Réglé à 87
N.m
Ohmmètre
20A
SL
Régulateur d'induction
Table de correspondance
de la norme
DIN 43
760
CPC
220V-3ph
Réseau
Fig.II-2.11
· D'après les relevés effectués
(Annexe 1), on obtient une température limite des enroulements
statoriques de 125°C. La température ambiante
était de 22,2°C au moment de l'essai.
1ère constatation :
En prenant une marge de sécurité d'environ 10%,
les parties isolantes du moteur doivent tenir 140°C, au minimum. Ce qui
correspond d'après la norme NFC à la catégorie F des
matières isolantes (155°C).
Nota :
Il faut préciser que le prototype est démuni de
tout système de refroidissement. En effet, un dispositif
d'auto-ventilation serait inutile compte tenu des faibles vitesses de rotation
du moteur.
L'enveloppe du moteur est constitué d'une
résine de moulage « DAMIVAL 13 576 » dont la plage thermique
d'utilisation est de -70°C à +130°C. La notice technique du
matériau concerné précise une tenue thermique en continu
de 140°C, sans dégradation.
? Le matériau utilisé est limite en tenue
thermique. Il faut réduire les pertes magnétiques afin de limiter
les échauffements. La commande se chargera de réduire ces
pertes.
· La constante thermique d'échauffement est de
22,5min. La température limite du moteur est atteinte après
environ 112 min de fonctionnement (1h52 min).
°lim ? 1 2 5° C et
rth = 22 ,5 min.
|
|
(II-13)
2.6. Paramètres du modèle :
Equations électriques dans le repère (d,q)
de Park :
v R i L
=
ds s ds + d
v R i L
=
qs s qs + q
ds
di
dt

qs
di
dt
avec
e qs = w ( L d i ds +
daim ) e ds ? L q qs
?? et co i
3
L d = L q = L s = l f + 2 s
L m
et
Rs = 1 , 1 3 ?, L d
= L q = L s = 53 ,7 m H
? ? aim ? ? ? aim =
141 mWb
Equation mécanique dans Park :
3
T em = K T i qs avec
K T = N p
2
H
T T N J J
1 (
- =
em r ?? m +
p
T r = T rma + T r 0 + f O)
? e ds
+ e qs
??daim
r)
do) 1 dt I?
Tous les essais effectués permettent de déduire
l'ensemble des paramètres numériques du modèle. On obtient
ainsi :
Constante de couple : KT = 13 ,5 N . m /
A
Nombre de pas du moteur : Np=64
Couple résiduel dû aux aimants : Tr0 = 3 N
. m Moment d'inertie du rotor : J m = 0 ,14 1 kg
.m2
Coefficient de frottement visqueux du moteur :
f =
0 , 0306 N . m / rad . s -1 0 lec)ou f = 0 ,205 N . m /
tr.min-1
|
|
(II-14)
Nota:
· Jr et Trma sont
à définir selon la machine entraînée.
· Le modèle ne tient pas compte :
des pertes magnétiques,
de la saturation du circuit magnétique,
de la variation du flux Taim, due aux
parties saillantes des plots statoriques.
· Attention :
vds et vqs sont en
réalité des valeurs primées.
3. ESSAIS EN CHARGE EN FONCTIONNEMENT
MOTEUR.
Cette série d'essais, effectuée en boucle
ouverte, permet de juger les capacités et les performances du prototype.
Par obligation, on a augmenté l'entrefer de la machine pour
éliminer les contraintes mécaniques et magnétiques
observées au début de nos essais. Cette modification a pour
conséquence de réduire sensiblement les performances de la
machine. Les améliorations mécaniques et magnétiques
nécessaires n'ont pas pu être réalisées dans le
cadre de nos travaux.
On notera clue les performances réelles
sont en réalité bien supérieures à celles
annoncées dans ce mémoire.
Pour réaliser ces essais, on utilise un banc d'essai
dynamométrique. Ce banc est équipé d'un frein à
poudre magnétique (couple résistant constant par rapport à
la vitesse) du type PB115 et de marque « Vibro-meter ».
3.1. Remarques sur les essais en charge :
Chapitre 2 : Essais expérimentaux et validation
du modèle - Mémoire CNAM Patrick BOIDIN.
.
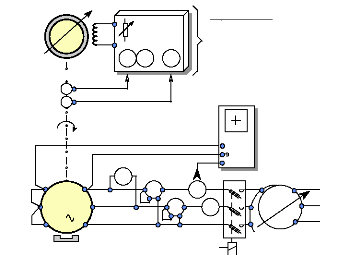
Aimants P.
Marche/Arrêt
J r = 1 0244 10 2
. _ kg m 2
, .
Trma
Tu Pu
Dispositif de Frein :
Capacité de réglage du couple résistant de
0 à 135 N.m
Couple résistant à peu prés constant par
rapport à la vitesse de rotation
n
Frein
ea
Poudre
T
n
n = 46,8 tr/ min
v a ( t)
i a ( t)
1'
1
U
20A
W
I
220V-3ph
Réseau
N
2'
MS
3
2
W
I
3'
3
Régulateur d'induction
Fig. II-3.1 : Schéma de montage des essais en
charge.
D'après les résultats obtenus et
présentés en annexe 1, on fait les remarques suivantes:
· Quelle que soit le couple résistant,
appliqué à l'arbre, le moteur a pu démarrer directement
sur la fréquence du réseau. Il suffit d'appliquer une tension
suffisante aux bornes du moteur.
Une charge équivalente à un couple
résistant constant de 138 N.m n'a pas empêché de
démarrer le moteur. Il faut noter que le moment d'inertie des masses
tournantes de la charge (frein à poudre) est relativement faible et
s'oppose peu à la variation de la vitesse.
1ère constatation:
? Les conditions de démarrage du moteur Fintronic
en boucle ouverte dépendent essentiellement du moment d'inertie des
masses tournantes et dépend beaucoup moins du couple
résistant.
· Le courant nominal de 9,3A limite le couple utile
à environ 100 N.m pour une fréquence d'alimentation de 50 Hz.
=
1. Pour un fonctionnement en service continu, il n'est
pas possible d'obtenir un couple utile supérieur à 100N.m sans
échauffements excessifs.
2. Pour un fonctionnement en service intermittent,
il est possible d'atteindre des couples utiles très élevés
(environ 180 N.m). Il faut cependant accepter un dépassement du courant
nominal.
2ème constatation :
? On tend à proposer ce type de moteur pour des
applications nécessitant des couples élevés durant des
cycles intermittents.
Dans ce cas de fonctionnement, il est important de
connaître les contraintes thermiques du moteur, compte tenu des courants
imposés. On pourrait prévoir une commande tenant compte à
chaque instant, de l'état thermique du moteur.
· Le courant à vide du moteur augmente
très vite avec la tension. Pour une tension de 300 volts, les courants
correspondent aux courants nominaux. Ce sont les pertes magnétiques qui
contribuent à absorber de tels courants.
3ème constatation :
? Pour une charge donnée, iI est essentiel de
limiter les pertes magnétiques dans les tôles du moteur. Il faut
réduire au mieux les tensions aux bornes du moteur. On applique des
tensions justes suffisantes pour maintenir le couple
électromagnétique maximale correspondant au couple
résistant.
· Les courants absorbés dans les phases du moteur
sont très inductifs. Par conséquent, le vecteur
représentatif de la f.e.m induite au stator tend à se retrouver
en avance sur le vecteur courant [9]. Dans le cas d'une
commande par onduleur « commutateur de courant », la position de la
f.e.m ne favorise pas l'annulation et l'inversion des courants (cas où
l'inductance synchrone est en court-circuit sur sa f.e.m). L'amplitude et le
signe de cette f.e.m ne sont pas aptes à s'opposer efficacement à
ce courant. Il faut insérer, dans le circuit, des condensateurs qui
permettent de transférer l'énergie stockée dans les
inductances vers les condensateurs.
4ème constatation :
? L'utilisation d'un onduleur de tension est moins
coûteuse et plus appropriée. Il n'est pas nécessaire
d'équiper le système d'un dispositif particulier de commutation
forcée puisque l'énergie stockée dans l'inductance est
dissipée au moyen des diodes de roue libre.
· Le flux créé par les aimants est faible
devant le flux nécessaire dans l'entrefer. On doit donc renforcer ce
flux par une réaction d'induit. C'est pourquoi, les courants statoriques
sont très inductifs. Par conséquent, il serait utopique de
vouloir améliorer le facteur de puissance sans réduire
sensiblement les performances du moteur en couple. Le rendement du moteur se
trouve pénalisé et les meilleurs résultats obtenus pour ce
rendement ont été de 40%. Toutefois, cette valeur ne peut pas
être considérée comme mauvaise compte tenu des conditions
de fonctionnement. En effet, pour des fréquences de rotation aussi
faibles, des couples aussi importants et des encombrements aussi faible, les
solutions utilisants le moteur asynchrone ne donnerait pas d'aussi bons
résultats, même muni d'une commande vectorielle de flux. Une
étude comparative serait intéressante à faire.
5ème constatation :
? Pour ce type de machine, il vaut mieux favoriser le
contrôle du couple instantanéau détriment du facteur de
puissance.
· Au démarrage, les courants de pointe,
absorbés par le moteur n'ont jamais dépassé plus de 2,3
fois le courant nominal. Dans la majorité des cas, ces courants sont
restés voisins du courant nominal.
· A l'arrêt, le flux constant créé
par les aimants tend à vouloir figer le rotor par rapport au
stator. On est en présence d'un couple"résiduel" qu'il
ne faut pas oublier de rajouter au couple résistant. Ce couple, obtenue
par un essai (bras de levier et poids),
prend une valeur approximative de 3N.m. Ce couple est constant
par rapport à la vitesse.
3.2. Résultats obtenus pour U ab = 340 volts et T
u = 138 ,5 N . m :
Ce relevé particulier va permettre, par la suite, de
vérifier la validité du modèle mathématique du
moteur. Avant cela, nous présentons les résultats
expérimentaux obtenus par ce relevé :
Mesures
|
Tu
|
Pu
|
Ias
|
Ibs
|
Pabs
|
Qabs
|
Vas
|
|
(N.m)
|
(kW)
|
(A)
|
(A)
|
(W)
|
(var)
|
(V)
|
138,5
0,64
11,3
11,3
1 995
6 365
196,2
n = 46 , 8 tr/ min. => 50Hz. Pmag =
717 W.
Calculs
|
(1)
cosg
( ( ' )
|
(2)
PJ
3 2
R s I bs
(W)
|
S
|
Pu
T u ( 2i n )
(W)
|
?
P u P abs
(%)
|
Pmag Pabs
(%)
|
|
2 2
+
P abs Q abs
(VA)
|
|
0,299
72,6
|
434
|
4 969
|
639
|
34,0
|
36,0
|
(1) : cos q = cos[ Arc tan( Q abs Pabs)].
(2) : A chaud, Rs = 1 ,1 3 ?.
4. SIMULATIONS EN BOUCLE OUVERTE ET VALIDATION DU
MODELE.
Toutes les simulations, précisées dans ce
paragraphe, sont réalisées numériquement avec le module
« SIMULINK » du logiciel « MATLAB SOUS WINDOWS » version
4.2c.1 d'Octobre 1994 (MathWorks). Ce logiciel est un outil informatique qui
permet de réaliser des simulations pour des systèmes
définis sous la forme d'équations
algébrodifférentielles. La méthode de résolution
numérique retenue pour notre application est celle de Runge et Kutta
d'ordre 5 et d'Euler.
4.1. Modèle mathématique du moteur et
valeur numérique des paramètres :
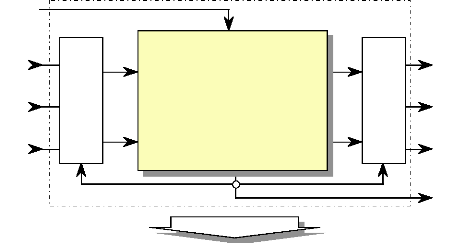
vas
vcs
vbs
Trma
Matrice
de
Park
[P]
vqs
vds
Modéle mathématique
du moteur
FINTRONIC
dans
Park
Avec
sa machine iqs
ids
Matrice
inverse
de
Park
[ P] --1
ias
ibs
ics
0
Fig. II-4.1.
d i ds ( t)
v ds ( t ) = R s i ds (
t ) + Ld
? ? ( )
t L i t
( )
d qs
dt
v t R i t L qs ( ) ? ?
s qs ( ) d
dt +w ( t)
(L d i ds ( 0+
taim)
di qs ( t)
3
T t K i t
( ) avec ?
K ? N
em T qs ( ) ?
? T p daim
2
T em ( t ) -- T r (t
avec T t T t f t T
? ?
r ( ) rma ( ) ( )
? ? r 0
dt
) - )
? ?
J J
?
m r
N
p
d o) (t
(II-15)

di ds (t
) R v t
ds ( )
? ? L i t
s ( ) ( ) ( )
? ? t i t ?
ds qs
dt L
d d
di t
qs (
dt
)
) R v ( t ) ? ? daim

? ? L i t
s ds
? ? t i t ? ? ? t
qs ( ) ( ) ( ) (
ds L L

d d
d
d o) ( t) Np
dt J m + Jr
T em ( t ) = K T i qs
0 )
[T em ( 0-- T rma ( t ) -- f o) ( t
) -- Tr0]
(II-16)
Pour effectuer les différentes
simulations, on définit les paramètres
Jr et Trma ( t) ainsi
que les valeurs initiales i ds0 ,
iqs0 , (1) 0 et 90 :
· En charge, on prend un moment d'inertie de la machine,
équivalent à celui du frein à poudre :
1,0244.10-2 kg.m2 . Cette valeur
correspond à une roue pleine en acier, de diamètre 0,1 m et
d'épaisseur 0,06m.
|
J
|
|
an R 4L
|
avec acier = 8 930 kg / m3.
|
ü --
|
2
|
(II-17)
· Le couple résistant
Trma, dû à la machine
entraînée, est supposé proportionnel au carré de la
fréquence de rotation avec une condition à vitesse nulle, non
nulle : Trma (t ) = k o)2 (t) + T
(II-18)
· Les valeurs initiales de i ds , i
qs ,00 et co0 sont supposées nulles.
· Les phases du moteur seront soumises à un
système triphasé de tensions de la forme :

v as = Vs 2 coscost

v bs = Vs 2 cos(cost

v cs = Vs 2 cos(cost
(II-19)
En réunissant toutes les valeurs numériques, on
obtient :

R =1 , 13n / L d = 53 , 7 mH / ''daim = 141 mW /
Np = 64
K T = 13 , 5 N . m / A / J m = 0 , 141 kg . m
2 / T r0 = 3 N .m
f = 0 , 0306 N . m / rad-1 (é
lec) / i ? ?
i ? ?
? ? 0
ds 0 qs 0 0 0
|
En charge:
|
T t k t T J
2 ? 2
? ? ? ? 1 0244 10 kg m
.
rm a ( ) ( ) / , .
r
|
2
|
(II-20)
Chapitre 2 : Essais expérimentaux et validation
du modèle - Mémoire CNAM Patrick BOIDIN.
.
4.2. Simulations en boucle ouverte :
· Moteur non chargé soumis à un
échelon de tension de 164,5 volts entre phases :
n (tr/min) pour Vs=95 volts / fs=50Hz /Trma=0 / Jr=0
|
90 80 70 60 50 40 30 20 10 0 -10
|
|
0 0.5 1 1.5 2
Temps (s)
a) n (2 s ) = 46 , 9 tr / min.
ias, ibs, ics (A) pour Vs=95 volts / fs=50Hz /Trma=0 / Jr=0
0 0.05 0.1 0.15 0.2
Temps (s)
c) I s (2 s ) = 3 ,77A
Tem (N.m) pour Vs=95 volts / fs=50Hz /Trma=0 / Jr=0
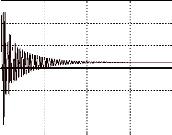
150
100
50
0
-50
-100
-150
0 0.5 1 1.5 2
Temps (s)
b) Tem (2 s ) = 12 , 6N .m
ids, iqs (A) pour Vs=95 volts / fs=50Hz /Trma=0 / Jr=0
0 0.5 1 1.5 2
Temps (s)
d) ids (2s ) = 5 ,25 A nqs (2 s)
= 0 ,94 A
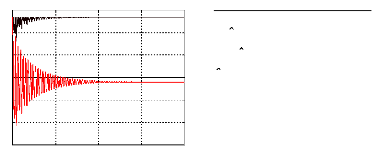
p 6 ?
= 84 ,1° = 4 ,21° = 80
,0°
vds, vqs (primées) (V) pour Vs=95 volts / fs=50Hz /Trma=0
/ Jr=0
0 0.5 1 1.5 2
Temps (s)
En régime permanent, on obtient :
R s I s = 6 ,03 volts
L d s = 90 ,0volts
E s = 44 ,3 volts
V s = 134 ,4 volts
150
100
50
0
-50
-100
-150
e) cos p = 0 ,10
v ?ds (2 s ) = -- 9 , 87 volts / v
'qs (2 s ) = 134 volts P ast = 48 ,3W
Fig. II-4.2 : Ondes obtenues par simulation. Moteur en boucle
ouverte et à vide.
Les résultats obtenus par la simulation permettent de
faire les observations suivantes :
* A vide et d'après la simulation, le moteur oscille en
vitesse pendant sa phase de démarrage. La durée est trop courte
(moins d'une seconde) pour constater réellement ce
phénomène. Néanmoins, en augmentant la tension aux bornes
du moteur, on remarque effectivement ces vibrations qui se confirme par
une simulation à tension plus élevée :
n (tr/min) pour Trma=0, Vs=200 volts et fs=50 Hz
|
140 120 100 80 60 40 20 0 -20
|
|
0 0.5 1 1.5 2
Temps (s)
Fig. II-4.3. Moteur en boucle ouverte et à
vide.
* Le courant absorbé par les phases du moteur est
fortement inductif :Déphasage par rapport à la tension de
84°. Ceci est normal, l'induit doit compenser le manque de flux produit
par les aimants en imposant une réaction d'induit plus importante que
normale.
? Moteur chargé soumis à un échelon de
tension de 340 volts entre phases :
n (tr/min) pour Vs=194,5 volts / fs=50Hz /Trma(n)=138,5
|
90 80 70 60 50 40 30 20 10 0 -10
|
|
0 0.5 1 1.5 2
Temps (s)
a) n (2 s ) = 46 , 9tr / min .
Tem (N.m)) pour Vs=194,5 volts / fs=50Hz /Trma(n)=138,5
|
350 300 250 200 150 100 50 0
|
|
0 0.5 1 1.5 2
Temps (s)
b) Tem (2 s ) = 151 N.m
Chapitre 2 : Essais expérimentaux et validation
du modèle - Mémoire CNAM Patrick BOIDIN.
.
ias, ibs, ics (A) pour Vs=194,5 volts / fs=50Hz /Trma(n)=138,5
0 0.05 0.1 0.15 0.2
Temps (s)
c) I s (2 s ) = 10 ,3A
ids, iqs (A) pour Vs=194,5 volts / fs=50Hz /Trma(n)=138,5
N.m
0 0.5 1 1.5 2
Temps (s)
d) ids s
( 2 ) = 9 , 23 A / i qs (2 s) = 11 ,2
A
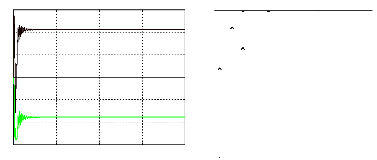
p 6 ?
= 79 ,5° = 40 ,0° = 39
,5°
vds, vqs (primées) (V) pour Vs=194,5 volts / fs=50Hz
/Trma(n)=138,5 N.m
300
200
100
0
-100
-200
-300
0 0.5 1 1.5 2
Temps (s)
En régime permanent, on obtient :
R s I s = 16 ,4 volts
L d o) I s = 245 volts
E s = 44 ,3 volts
V s = 277 ,6 volts
e) cos p = 0 ,18
vids (2 s ) = -- 178 volts / vi qs
(2 s ) = 213 volts P Jst = 357 W
Fig. II-4.4 : Ondes obtenues par simulation. Moteur en boucle
ouverte et chargé.
D'après les résultats obtenus par la simulation et
les résultats obtenus par des essais, on construit le diagramme de
Fresnel suivant :
Chapitre 2 : Essais expérimentaux et validation
du modèle - Mémoire CNAM Patrick BOIDIN.
.
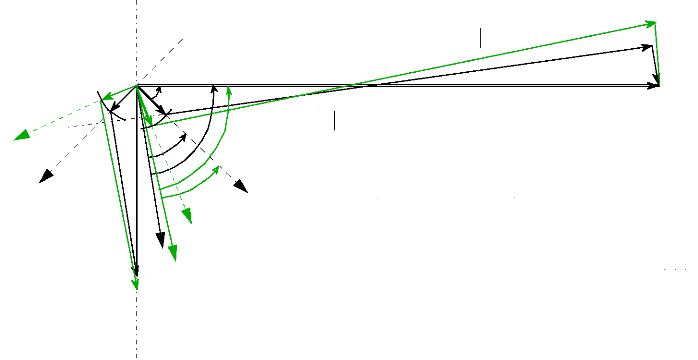
'
R s I s
?
1 ,4 A
= c I =
-,
L d w I s '
-,
9 0?
-,
L d WI s
9 0F
Simulation :
Essai :
Paim
-,
?
?
?
Es
Vs
-->
'I'
?
??
?
R I = 16 4
, volts
s s
?
?
R I 18 1
, volts
s s =
?
d
-,
'P i
,
??
q
L I 245 volts
d W =
s
?
L I 268 volts
d w =
s
?
V = 277 6
,volts
s
?
V = 277 6
, volts
s
?
q'
E = 44 3
,volts
s
?
I = 14 6
, A
s
E = 44 3
,volts
s
?
I = 16 0
, A
s
-,
-,
1J r
'
Is
? = 79 5
, 0
6 'I'
= 40 0
, °
= 39 5
, 0
? ? ? = 6 ,9 °
(p' = 72 6
, °
-,
R s I s
d'
-,
Wi
-,
Wr
-,
Is'
Fig. II-4.5 : Construction
vectorielle dans l'hypothèse de Behn-Eschenburg.
Moteur chargé
à 138,5 N.m et soumis à une tension composée de 340
volts.
Les résultats permettent de faire les observations
suivantes :
* La valeur du courant efficace obtenue par la simulation est
inférieure de 1,4A par rapport à la valeur de l'essai. Ceci
s'explique par les pertes magnétiques qui sont négligées
dans le modèle.
Connaissant la valeur des pertes magnétiques
Pmag = 717 W et supposant
qu'elles sont proportionnelles au carré de la tension, on
peut en déduire la résistance équivalente
Rm, puis le courant I
rm :

1 ,2
A
(II-21)
U 2 ab 340 2
= _ = 161 I = ab = _
Pmag 717
R m
U
3
R
m
161 3
Or, ce courant représente effectivement la
différence obtenue à 0,2 A prés et correspond à
11,6% du courant absorbé (10,3A).
* La différence sur le déphasage de 6,9°,
entre la tension et le courant, est due aux
|
pertes magnétiques. Si on rajoute le courant
|
....
Irm à la composante active
du
|
courant Is, on obtiendrait le nouveau
déphasage (p" suivant :
--> ->
I ac ( actips I rm
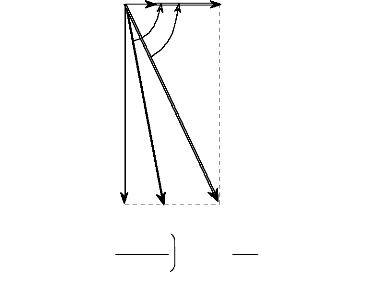
A. A.
(p = 79 ,5° (P I ac = Is cos p
= 2 ,63 A
A. A.
? I ac + I rm = 4 ,36A
(p"
-->
Is''
-->
I r ( ré actins
I r = I s sin p = 14 ,4 A
-->
Is
Fig. II-4.6
arctan(
...
Is sin
... ...
I oas + Irm
(II-22)
(? 14 4 ,
4 36 73 1 ?? ? , ? ,
-- arctan
I, =
Soit un écart théorique de 0,5°(très
acceptable).
4.3. Validation du modèle :
Les simulations font apparaître la
nécessité de tenir compte des pertes magnétiques dans le
modèle mathématique = Le modèle, tel qu'il est
défini, créé une erreur sur les courants de 11,6%. On
remarque 2 points essentiels :
1. La consommation d'un courant actif
supplémentaire a pour effet de déphaser en moins le courant par
rapport à la tension (72,6° pour 79,5°).
2. L'angle interne du moteur a sensiblement augmenté, ce
qui correspond à un décalage supplémentaire du rotor par
rapport au champ statorique.
= Ces 2 constatations ont des conséquences importantes. En
effet, si on projette le vecteur courant sur les axes d et q, on fait les
remarques suivantes [7] :
1. Pour un même couple résistant et dans le cas
où les pertes magnétiques ne sont pas négligées,
Iqs (régime permanent) a augmenté =
Dans le modèle, on peut s'imaginer que la
différence de ces courants est
absorbée par une
résistance fictive.
2. Pour un même flux magnétisant et dans le cas
où les pertes magnétiques ne sont pas négligées,
Ids (régime permanent) a diminué = Il y a eu
un
renforcement de ce courant dû à l'augmentation de
Iqs.
Dans le modèle, on peut s'imaginer que la
différence de ces courants est
fournie par la réaction
d'induit. Sa valeur dépend de la résistance
fictive du cas
précédent.
|
5. CONCLUSION.
· En boucle ouverte, le moteur démarre sur le
réseau à 50Hz sans difficulté. Ceci est dû au nombre
important de pas (64), assimilable au nombre de paire de pôles et
à la constante de couple élevée de 13,5 N.m/A. Le courant
nominal est de 9,3A.
· La position initiale du rotor ne semble pas conditionner
la phase de démarrage du moteur FINTRONIC.
· L'ensemble mécanique du moteur manque de
rigidité. Il faut améliorer les moyens d'assemblage des 2 stators
et revoir le train de roulements du rotor qui laisse apparaître un jeu
néfaste sur l'entrefer.
· La forme d'ondes des tensions et des courants est
quasiment sinusoïdale. = Une commande du type "sinus" s'impose à ce
type de moteur.
· Une constante de couple élevée assure au
moteur une qualité certaine. Néanmoins, la forme des courants,
associée à une commande, devra être parfaite et
démunie de tout harmonique. Cette condition est nécessaire pour
éviter les à-coups de couple dépendants de cette
même constante de couple.
· La température atteinte du moteur, en
régime permanent, semble limite pour les matériaux
utilisés dans la conception du moteur. Les échauffements sont dus
essentiellement aux pertes magnétiques qu'il faut réduire au
mieux par l'intermédiaire de la commande.
· Une des qualités de ce moteur est d'être
conçu suivant une technique qui lui permet de recevoir plusieurs disques
"rotor" et d'augmenter ainsi ses possibilités de couple pour une
même structure de base.
· Peu de moteur, actuellement sur le marché,
sont capables de fournir d'aussi bonnes performances avec un encombrement et
une masse aussi faible. Le principe, utilisé dans la conception de ce
moteur, est judicieux (structure modulaire) et semble prometteur pour des
moteurs d'une puissance plus importante et pour des couples utiles plus
élevés (multi-disques).
· Les pertes magnétiques, apparus lors des
essais, ont faussé les résultats de la simulation d'environ 11% ?
Il faut inclure ces pertes dans le modèle mathématique.
Néanmoins, aux vues de la complexité du sujet, nous avons
préféré conserver le modèle tel que nous l'avons
défini précédemment. On précise que l'étude
d'une commande à couple maxi va permettre de limiter au mieux la tension
aux bornes du moteur. Ainsi, les pertes magnétiques seront
limitées d'autant et notre modèle se rapprochera mieux de la
réalité.
CHAPITRE 3
COMMANDE VECTORIELLE
AVEC
CAPTEUR
MECANIQUE
1. OBJET.
Dans cette partie d'étude, nous avons
développé puis testé, par des simulations, une commande
vectorielle dans le formalisme de Park. Pour cela, on a utilisé un
onduleur de tension muni d'un dispositif de contrôle des courants et de
découplage que l'on présente dans ce chapitre. Le formalisme de
Park est le seul moyen technique actuel qui permet d'agir directement sur les
grandeurs instantanées du moteur et d'obtenir une commande dynamique.
Néanmoins, son utilisation n'est pas sans contrainte et impose de
connaître à chaque instant, la position du rotor : Matrice de
passage, fonction de 0. Pour limiter l'étude de la
commande, dans un premier temps, on supposera que la position du rotor est
parfaitement connu.
2. PREAMBULE. 2.1. Le moteur synchrone :
La particularité essentielle du prototype qui
s'apparente à un moteur synchrone, est d'avoir une vitesse de rotation
« synchrone » avec la pulsation de la source qui l'alimente.
Contrairement au moteur asynchrone, aucun glissement prolongé n'est
toléré. Seul, le décalage entre les champs tournants est
possible et ne doit pas dépasser une certaine limite dépendante
de la charge entraînée. Il est possible, néanmoins, de
contrôler ce décalage, en agissant sur l'amplitude et/ou la phase
des 2 grandeurs électriques en rotation. Dans le cas d'un moteur
à aimants permanents, on agit uniquement sur une seule grandeur, l'autre
n'étant pas accessible.
Remarque :
Pour un couple résistant donné, il est possible
de limiter au mieux les courants absorbés par le moteur. Il suffit de
réduire ces courants de façon à obtenir un décalage
entre le flux rotorique et le flux statorique de 90° électrique.
Dans cette situation, le couple résistant est égal au maximum de
couple, capable d'être fourni par le moteur.? L'avantage de ce type de
fonctionnement est de limiter les pertes magnétiques. Ce mode de
fonctionnement est appelé communement « Commande à
couple maxi ».
2.2. Commande du moteur « Fintronic », en
courant ou en tension? :
La source d'alimentation du moteur peut être en tension
ou en courant et dépend du type de récepteur que l'on doit
alimenter. On rappelle qu'une source de tension ne peut pas alimenter un
récepteur de tension et de même pour les courants. Il faut donc
savoir si le moteur « Fintronic » est un récepteur de courant
ou un récepteur de tension.
En reprenant les équations de Park, on remarque que le
couple électromagnétique est directement proportionnel au courant
d'axe q.
Tem = K T . iqs
(III-1)
Cette expression nous montre que le meilleur moyen de
contrôler le couple instantané de la machine, serait d'utiliser
une commande en courant. Par contre, cette condition suppose de
laisser évoluer librement les tensions. Or, si le moteur à
l'essai est plus inductif que capacitif, on verrait apparaître des
surtensions aux bornes du moteur et des composants de puissance.
La f.e.m à vide, induite par les aimants, est
relativement faible dans le cas particulier des moteurs à aimants
permanents. Il faut donc compenser cet inconvénient en imposant une
réaction d'induit magnétisante plus importante que normale. Or,
pour limiter les courants à des valeurs acceptables et répondre
à la demande, il faut augmenter la valeur de l'inductance synchrone du
moteur et imposer un circuit plus inductif au stator.
le moteur « Fintronic » est un
récepteur de courant qui demande une commande en tension avec un
contrôle des courants.
2.3. Principe de la commande en tension et de
l'autopilotage du moteur :
Commander le moteur à partir d'une source de tension et
contrôler les courants revient à effectuer une commande selon le
principe suivant :

Rotation de la charge
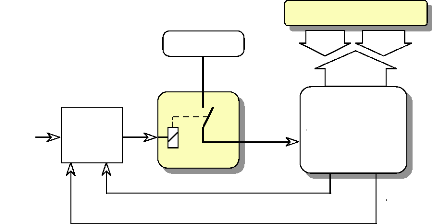
Courants
désirés
Contrôle
des
Courants
+
Autopilotage
(Boucle d'autopilotage) Position du rotor/repére fixe
Ecarts
Source de Tension
continue
Convertisseur
de Puissance
Tensions appliquées au moteur
Moteur
à réluctance variable
et à
aimants alternés
Couple
résistant
Charge à mettre
en mouvement
Couple
électromagnétique
+
Vitesse
Fintronic
Moment
d'inertie
Courants
obtenus
Courants
obtenus
Fig. III-2.1
L'information de position constituant la boucle d'autopilotage,
sert à asservir la position

du flux statorique à celui du rotor "
.
aim
Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
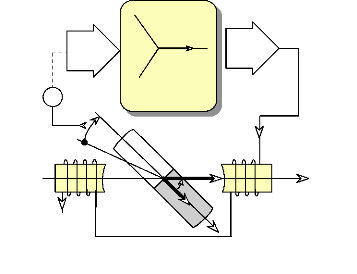
C
bs
cs
Décision prise
à l'instant
considéré
-->
I s
as
i
Point de référence
S
Axe du flux
statorique
?
N
? i
a
S
i
-->
? aim
N
Axe rotor
Le rotor tend à vouloir s'aligner
avec
l'axe du flux statorique
Fig. III-2.2
Analyse
de la situation
à
l'instant
considéré
Mise en
application de la
décision
prise
Capteur de
position
du
rotor
La figure III-2.2 représente, sous une forme
simplifiée, le principe de fonctionnement du moteur synchrone à
aimants permanents avec son autopilotage.
2.4. Contrôle par la tension du couple
électromagnétique :
Le moteur est commandé en tension. Il faut donc exprimer
le couple électromagnétique
en fonction de v
qs et non plus en fonction de iqs.
On obtient ainsi, à partir des équations
suivantes :
qs
di ds
v R i L
? ? ? ? L i
ds s ds d d
dt
|
v qs = R s i qs Ld
|
di
dtqs
+coL di
|
? ?ds Wdaim
|
1
T em -- T r = ( J m +
JN
p
iqs
? d ? ?
dt f T K
r ) ? ? ?
Avec
?? ?? em T
(III-2)
la nouvelle expression,
KT di qs
T em =v -- L
R qs d dt --0 L d i ds --
(1)1Pdaim
s
(III-3)
qui est devenu dépendant non seulement de
v mais aussi de et de la variation de
ids
qs
Pour supprimer une partie de cet inconvénient, on impose
un courant i nul au moyen
ds
d'une régulation sur ce courant avec une
référence nulle. En supposant que la vitesse est restée
constante durant la perturbation, on obtient alors :
Tem
K ? di
T qs
= R v L
?? - ? ?0 ?
qs d daim
dt
s
(III-4)
On a ainsi une équation différentielle à
coefficients constants facilement résolvable de la forme :
i qs
L di v
d qs qs ? O)0 " daim
+ ?
R dt R R
s s s
(III-5)
Nota:
Cette condition est indispensable pour définir les
paramétres d'un correcteur du type PI qui de par sa nature gére
des systémes uniquement linéaires.
3. MODELE D'ETAT DU MOTEUR ET CHOIX DES VARIABLES
D'ETATS.
3.1. Définition et notations :
Tout système linéaire, continu et à
variables multiples, peut être représenté par le
modéle d'état suivant :
x? Ax Bu v

= + +
y Cx Du w
= + +
(III-6)
Avec
A : Matrice (n,n) d'évolution du
système.
B : Matrice (n,ne) d'application de la
commande.
C : Matrice (ns,n) de sortie du
système.
D : Matrice (ns,ne) d'action directe sur le
système.
x : Matrice d'état.
x? : Matrice dérivée de la matrice
d'état.
u : Matrice d'entrée.
y : Matrice de sortie.
v : Bruit d'état du système. Ce
vecteur représente les incertitudes de la modélisation.
w : Bruit de mesure du systéme. Ce
vecteur représente les bruits affectés par les différents
capteurs des grandeurs mesurées.
Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
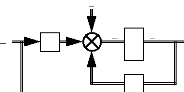
u
B
+
v
+
+
x
A
1
x
w
+
+
y
C
+
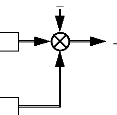
D
Fig. III-3.1
En utilisant la transformation de Laplace, on obtient la solution
du système différentielle à variables d'états :
X?
? ? ? ? ? ? ? ? ?
? 1
p pI A X B U p V p

? ? ? ?
i
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?

? 1
Y p C pI A X BU p V p
? ? ? ? ? D U p W p
?
i
(III-7)
Uniquement valable pour un systéme d'équations
différentielles linéaires.
Xi correspond à la matrice des
conditions initiales du vecteur d'état et p
l'opérateur de
Laplace.
En supposant que les conditions initiales et les bruits sont
nuls, on obtient la fonction de transfert :
|
H p Y ? p ? ? ?
? ? ? ?
? X p ? C pI ? A
|
-1
|
B + D
|
(III-8)
3.2. Choix des variables d'états :
Une commande en tension impose naturellement de
considérer les tensions comme étant les entrées et les
courants comme étant les sorties. Les variables d'états sont
généralement celles qui dérivent dans le temps. Ca sera
donc les courants. Du point de vue mécanique, l'entrée ne peut
être que le couple résistant et la sortie, la vitesse angulaire ;
La variable d'état sera la vitesse puisqu'elle dérive. Ainsi, on
pose :
di

? v ?
ds
? ?
? ?
? T ?
r


i ds
i ds
? ?
?
? ?

?
=
u v
?
? qs ?
et x
qs ?
? ?
? ? ?
?
?
i qs [I X
? d ?

ds ?
I
dt
? di ?
qs
? ?
dt
? ?
? ?
? dt ?
, y i
? ?
(III-9)
1
?
? ?
0
Rs
co
Ld
Rs
lidaim
d
L d L
ds
qs
En reprenant les équations de Park, on obtient :
I--
ds? ? ?
? 0 3
?
? 2
?
?
?
?
?
?
?
di
? ? ? ? ? _1
-co
qs
dt
di
dt
d ?
dt
? ?
2 lidaim
p J
J
?
m
f
J J
?
r m r
N
1
Ld
0 0
0
Np
J m + Jr
0 0
?
i
i
i
r
[
+
F
[
co
1
i
r
[
vds
i ?
?
? ?
vqs
i ?
? ? ? ?
?
?
Tr
1
Ld
0

(III-10)
i 1 I- 1 0 011- i i
qsI.I0 1 0L1 i 0) lj 0 0
0)
dsqs
ds
I I
(III-11)
Avec :
A
?
?
?
?
[
?
Rs
--0) _
L d _L
R
L
0
d
s
N
2 lidaim
p J + J
m
co 0
r J m -FJr
lidaim
IN 1
i
f
3
2
0 0
0 0
r
?
?
1
[
i ? ?
[
1
Ld
0
1
Ld
0
N p
J m + Jr
, B
(III-12)
|
C=
|
r
[
|
1 0 0f 0 1 0[i
0 0 1
|
: Matrice identité. D = 0
|
(III-13)
L'inconvénient de ce système vient de la matrice
A. En effet, elle présente un double
terme
non-constant (co et -co), qui nous empêche de résoudre le
système. On linéarise
donc autour d'un point de fonctionnement
oil co = c 0 , ids = Ids
0, i qs = Iqs 0 , v ds
= Vds0,
v qs = Vqs0 et T r ? T 0 r
.
Après avoir défini judicieusement les
paramètres concernés, on impose des faibles variations autour de
ce point de fonctionnement. Pour mettre en application cette solution, on
remplace :
I ds 0 + Ai ds
I qs 0 +
Aiqs
0) 0
+ Aw
V ds 0 + Av ds
V qs 0 + Av qs
T
r 0 + ATr 0

x par X 0 + Ax
r
[
1
et u par U 0 + A
u

r
? [
1 ?
?
? ?
(III-14)
A correspond à l'écart subit par
l'élément considéré, autour de son point
d'équilibre.
Après une série de transformations, on abouti au
nouveau système matriciel :
ds
d Ai
qs
dt d Ai
dt
0
dAco
? ? ? ? ?
?
?
dt
?
?
?
?
?
? ? ? ?
? ?
? L 0 Aco 0
d
Rs
?
qs

?
r
?
1 0
1 ?
?
?
0 ? ? 0 ?
L
? i ? d
? ? ? ? v

R ?
s daim
?? ? ? I
0 0 ds 0
L L
d d
? ?
? ?
?
?
xis
3
f
0
?
? ?
2
N 2 daim
p J + J
m
r
J m + Jr
ds ds
? 0 1 ?
? i ? ? v
qs qs
? ? 0 ?
? L d ? ?
?? ? T
0 ? N ?
? r 0
p ?
0 0 ? ??
J m Jr
? ?
(III-15)
Les termes Aco 0 et
--600 qui interfèrent avec l'expression des
courants, rendent lesystème toujours non-linéaire. En
considérant que la constante de temps mécanique est
supérieure à la constante électrique d'un
moteur, on peut supposer que les variables mécaniques sont
restées constantes lors de l'évolution des courants, dans le
temps.
A partir de cette remarque, il est possible d'annuler les 2
termes gênants en tenant compte uniquement des équations sur les
courants. On a:
?
qs
dt
d i
?
dt
--co0 --
ds
qs
i ds
i qs
s
d
s
d
?
?
?
? ?
d i ?
?
ds ?
?
? ?
? ? ?
?
?
R L
(0 0
R L
1 ?
?
?
?
? A
?? A
?
1_1+
? ? ?
?
?
1
Ld
0
0
1

Ld
? ? ?
?
?
? Av
?? Av
?
I_
(III-16)
Sous cette forme, il est maintenant possible de
résoudre le système à partir des équations III-7 de
Laplace. En négligeant les bruits et en considérant les
conditions initiales nulles, on a la fonction de transfert :
H (p)-
I dqs (p)
? ? ?1
? ?
pI A B
V dqs(p)
(III-17)
Avec
? ? ? ?
|
? ? I p
ds
I p ? ?
dqs ? I p
? ?
? qs
|
1 V p ?
? et ? ? ? ?
? ? ds
V p ? ?
dqs ? ? ?
? ? ? V p
qs ?
(III-18)
|
3.3. Détermination du sytème
d'équations d'états et schéma fonctionnel :
· Calcul de (pI-A)-1 :
(pI -- A) = 1 (-1)i #177;j cofacteur(
pI -- A)
det ( pI -- A)
(III-19)
Pour que la matrice pI-A soit inversible, il faut que son
déterminant soit non-nul:
1 2? ? L
Det ? pI A ? d ? dp ? p
2 1
? ? ? ? ? ?
? 2 2
1 d p d
? ?? ? ? avec ?d
2
?
2 0 2 0 ?? ?
d

? ? ?
Rs
(III-20)
L d = 53 ,7 mH
Rs = 1 , 1351 = De t(pI -- A)
= p 2 + 42 , 1 p+ 443 + co20
(I) 0
On en déduit (pI -- A) 1:
1 Fp + 1 T d ?1c?
0
? ? ? ?
pI A
? ? ??
pI A
? ? p ? d ??
det ? ?
1
0
(III-21)
· Détermination de la fonction de transfert
:
Soit, (pI -- A ) 1B = H (p) --
r 1 ? 1 ? ? ?
0
? L p d
?? ? ?? ?

1 ? L
d d
? ?
det ? ?
pI A
? ? 1 ? 1 ?
? 0
? L p d
?? ? ?? ?
? ? L ? ? ?
d d
(III-22)
On en déduit :

Rs
L2
d
? ? ? ? ? ?
R
s
L2
d
2
d
ti
0
?
0
d
?
L
?
? ? ? ?
? ?
p ? ? dp + 1
(Tdp+ 1
?
Ld
(Tdp+ 1
[ Vp
???
ds
?
V qs
( p) ?
2 d2
+ ?
1 ? ? ? ? ?
(p)
?
?
?
Ids
I qs
2
co
0
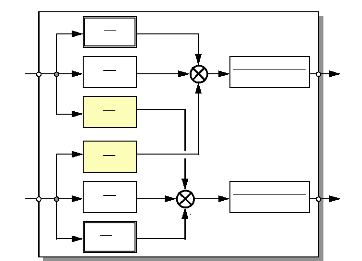
(III-23)
+
+
+
· rd
1
Lp
d
'n0
Ld
'n0
Ld
Rs L 2
d
Rs L 2
d
+
2
2
1 Lp
d
-
+
· rd
(rdp + 1)
2
I ds( p)
0
2
I qs( p)
0
2
?
·rd2 oa
2
?
·rd2 oa
(rdp + 1)
V ds ? p ?
V qs ?p)
Fig. III-3.2 : Schémas fonctionnels du moteur «
Fintronic » dans le repére (d,q) Deux remarques essentielles
sont à faire :
1. Le schéma fonctionnel de la figure III-3.2, montre que
les courants de Park ids et iqs
sont liés par la vitesse angulaire au point
d'équilibre c0. L'idée consiste donc
à
intégrer, dans la régulation des courants, un
dispositif de « découplage » capable de rendre autonome les 2
boucles de régulation. Nous verrons par la suite, comment
réaliser cette fonction.
2. La condition de stabilité d'un système, est
d'avoir les pôles de sa fonction de transfert à partie
réelle négative. Dans notre cas, les pôles correspondent
aux valeurs qui annulent le déterminant de pI-A. Soit, la
résolution de l'équation :
2
p 2 + 42 + 99039 = 0
p ou sous une autre forme, ( p + R
s L d )+? 2 = 0
0
Rs
p = - #177; co0 soit
numériquement, p = -- 21 , 0 #177; j w 0
L j
d
Les pôles ont leur partie réelle négative ;
Le systéme est donc stable.
Le coefficient d'amortissement z du
systéme dépend de la vitesse au point
?
d'équilibre. Sachant que z = sin ? avec
N' = arctan , on a:
?
z =
21 ? ?
? 0
)?
1
]
? ?
sin arctan
?? ??
(III-24)
Pour une vitesse angulaire nominale de 402 rad/s, on a un
coefficient d'amortissement de 0,052 => En boucle ouverte et à la
vitesse nominale, le système est trop peu amorti, fâce
à une perturbation. Il est néanmoins stable.
Un amortissement idéal de 0,707, ferait correspondre
une vitesse angulaire de 21 rad/s (5% de la vitesse nominale) ? Il faut donc
refermer les boucles de régulation et faire appel à des
correcteurs afin de corriger, au mieux, le placement des pôles sur le
plan de Laplace.
4. ETUDE DE LA REGULATION DES COURANTS DE PARK. 4.1.
Etude du découpleur linéarisant [10]:
Le but de cette étude consiste à définir
les paramètres d'une matrice (2x2) qui
permettent de découpler
les 2 courants de Park i et i . Cette matrice
sera notée
ds qs
[Dec] et les entrées du
découpleur, U ds ( p ) et U
qs ( p) .
Fig. III-4.1
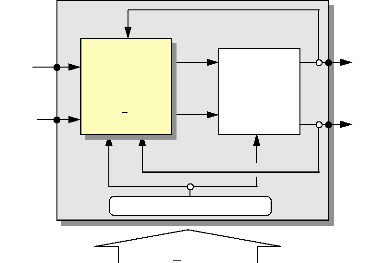
U ds? p?
U qs? p ?
Découpleur
Linéarisant
[Dec]
?
? a b ?
??
c dlj
Moteur + découpleur
H (p)
?
Point
de fonctionnement ?0
Vds( p)
Vqs( p)
Moteur
Fintronic
I ds( p)
I qs( p)
On pose :
|
[
|
Vds
Vqs
|
? ?
? ? ? ? ? ?
p ? ? U p
ds
? ? Dec ?
p ? ?
? ? U p
qs
|
1
I
J
|
Fa b1
avec [Dec] =I
L c dij
|
(III-25)
En reportant l'expression des tensions ci-dessus dans celle des
courants de III-23, on obtient :

R
s
L 2
d
0
o)
i
?
?
?
? ?
(Td p+ 1)
( ?
p1 1
? ? ? ?
? ?
p ? det pI A
?
(Td p + 1)
?
Ld
? U p
? ? ?
ds
?
U p
? ? ?
? qs ?
[
Ids
I qs
Rs L2
d
1
?
L
0
co
d
L
? a b ?
??
c dij

Rs L2
d
Ids
[
? ? ? R ?
0 s
? ?
? d p ? 1 ? ? c b ? ? ?
? d p ? 1
L L 2
? d ?
d d
co
I qs
?
? ? d
? L
? a ??
0
R s
r
[
? ? ?
0
? ? b ? d ?
? L d ?
(Td p + 1)
R
2 ? ? 1
s ? ?
d p
L
?
0
? a ? c ?
L d ?
L 2
d
d
( ?
p1
1
? ? ? ?
? ?
p ? det pI A
?
[U ds(p)1 ?
U p
? ? ?
? qs
J
(III-26)
En développant, on obtient :
(III-28)
En prenant arbitrairement a=d=1, on obtient la matrice de
découplage suivante :

(III-29)
d
? 0
?
?
?
?
?
?
? 0
1
?
? ? ? ? ?
1
?
dp
1
? D ec?
1
? d
? dp
? 2 R ?
s
0 ? ? ?
? d p ? 1
? ? 2
1 R R ?
0 s ?
? ? ? ?
p L d p
s
? ? ? ? ? ?
? ? 1 ? U p
2 qs
det pI A
? ? ? d p ? 1 ?
d
?


Ids
I
qs
D'où, la nouvelle fonction de transfert
moteur+découpleur :
Il faut annuler le dernier terme des 2 équations
précédentes. Pour cela, on résoud le systéme
suivant :
? ?
? d p ? 1
s
?
d
1
? 0
?
?
dp
?
1
d
R ?
b
s
L 2
(td p + 1 ) + d L
d
-- a L 0 ?
d
R
?
c
d
?
0
? 0
? 0
d
b
? ?
1
?
?
dp
?
1
a
?
? 0
?
c
L 2
d
? ?R ? ? ?
? ? ? ?
a L d p c L U p b
? ? ? ?
R ? ?
1 ?
s 0 s
? 1 L d p d L U p
0
? ? ? ? ? ? ? ? ? ?
1 ? ? ? ?
2 ds 2 qs
det pI A
? ? ? ? d ? ? d ? ? ?
d d
Ids
I qs
? p =
(III-27)
?
1 ? ? R ? ? ? R ?
0 s 0 s
? ? ? ?
p ? ?
? ? b ? d ? ? ? ?
? d p ? 1 ? ? ?
U p ? a ? c ? ? ? ?
? d p ? 1 ? U p
qs ds
pI A
? ? L L 2 L L 2
det ? ? d ? ? d ?
d d
1 ?
? ?
? R ? 2 R ?
0 s
? d p ? ?
1 ? 0 ?
? dp ? 1 ?
?
? ?

I dqs \p /td2
?
s ?? L 2
H
? p --

? d
2
0 Rs

? ? ? ? 2
U p ? ? ? ? ?
?
2 2
dp d ? R
1 s
dqs 0 0 ? ?
ti
? 1
dp
?
? d p ? 1
? ?
L2
d
(III-30)
En reprenant l'expression III-25, on obtient :
Découpleur linéarisant.
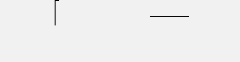
d
t
1
w 0
?
1
t
+
dp
1 ?
1
1 i
d
1 ? L
t
1
w 0
1
dp
t
+
? V p
? ? ?
ds
?
V p
? ? ? ?
? qs ?
? U p
? ? ?
ds
?
U p
? ? ?
? qs ?
(III-31)
On obtient ainsi sous forme de schéma fonctionnel, le
moteur FINTRONIC muni de son découpleur fonctionnant autour de
c0 :
Fig. III-4.2
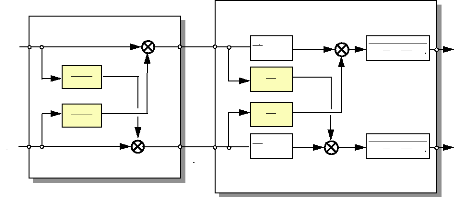
R
L2 d
Rs
L2 d
s
(ndp+ 1)
(ndp+ 1)
w0
Ld
w0
Ld
+
+
-
+
p 2 + ? 2
2 0
d p d
? ?
? ?
p 2 + ? 2
2 0
d p d
? ?
? ?
1
2 1
1
2 1
+
tdp+ 1
030T
d
-
d
030T
T
1
dp+
+
+
U ds? p)
U qs( p)
Vds( p)
Vqs( p)
I ds( p)
I qs( p)
Pour mieux comprendre le rôle du découpleur et
vérifier son efficacité, nous avons effectué une
série de simulations avec le système fonctionnant en boucle
ouverte pour une vitesse de rotation donnée,
c0 constant. D'après les résultats
obtenus, le dispositif a bien rempli ses fonctions de découplage. En
plus, il a permis de supprimer les oscillations de courant qui ont eu tendance
à augmenter avec co0. En contre partie, on fait les
remarques suivantes :
· Ce type de découpleur, impose d'estimer les
paramètres Ld et Rs de la
machine. Il faut donc connaître les paramètres du moteur.
· 03 est constant que durant un laps de
temps. Or, les courants ne disposent que de 72ms environ (constante
mécanique) avant que la vitesse angulaire n'évolue et rende le
système non linéaire. Le découpleur réduit les
oscillations mais ralentit la progression des courants.
4.2. Autre solution de découplage :
A partir des équations électriques de Park
çi dessous, on propose une autre solution de découplage des 2
courants [11].
v ds = R s i ds Ld --
e
di ds
dt ds
di
v qs = R s i qs Ld dt +
e qs
(III-32)
La solution consiste à remplacer v
ds par uds -- e~ds et v
qs par uqs + e~qs , de
façon à obtenir les deux nouvelles expressions suivantes :
? Chaque courant dépend uniquement de sa propre
tension
u ds = R s i ds Ld
u qs = R s i qs Ld
ds
di
dt

ds
di

dt
(III-33)
Avec ~eds et
e~qs : variables à paramètres estimés.
Or, pour valider cette expression, il est essentiel que
~eds puisse correspondre à chaque instant
à e ds et ~eqs
à e qs.
Sachant que e ds ? ? L d i
qs et e qs ? ? ? L d i ds ? ??
daim ? , on remarque très vite que la
qualité
du découplage dépend essentiellement de la qualité des
paramètres estimés
~
~Ld, 'daim et de la
précision de mesure de la vitesse angulaire w.
On représente les 2 solutions de découplage par
les schémas blocs suivants :
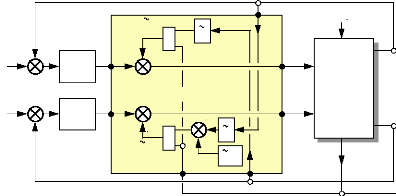
ids*
i qs
*
ids
iqs
+
+
-
-
PI
PI
uds
uqs
+
+
eqs
eds
+
-
Découpleur
.
.
03
03
+
Ld
+
4,daim
Ld
vds
vqs
Moteur
Fintronic
Trma
?
iqs
?
ids

Fig.III-4.3 : Découpleur de la
2ème proposition.
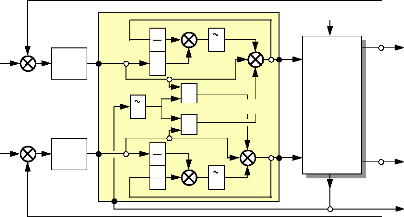
ids*
i qs
*
ids
iqs
+
+
-
-
PI
PI
uds
uqs
Co
td
d
dt
d
dt
d
dt
d
dt
-
-
.
.
+
+
Découpleur
td
td
+
+
+
+
+
-
vds
vqs
Moteur
Fintronic
Trma
?
i ds
iqs
?
?
Fig. III-4.4 : Découpleur de la
1ème proposition.
4.3. Etude comparative des 2 découpleurs
:
Les 2 solutions proposées peuvent être
résumées schématiquement de la façon suivante :
Solution n°1 Solution n°2
ids

Découpleur n°1
Dérivation des entrées
et des sorties
Ld Rs

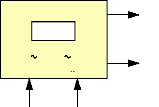
Ld
??daim
vds
vqs
Découpleur n°2
Pas d'action
dérivée
? iqs
Fig.III-4.5
· Les valeurs estimées sont
Ld et Rs dans la
première solution et Ld,
Tdaim dans la
seconde.
· Il paraît plus facile de
prédéterminer la variation de la résistance statorique
Its en fonction de la température que le flux
créé par les aimants en fonction de cette même
température.
· La seconde solution nécessite 2 entrées
supplémentaires ids et
iqs.
Les erreurs faites sur les mesures de courant sont
multipliées par 2.
La première solution impose de dériver les
entrées/sorties pour découpler les courants. C'est
l'inconvénient de cette solution.
En conclusion, il est difficile de choisir entre les 2
solutions proposées, sans les tester réellement. Elles ont
chacune leurs avantages et leurs inconvénients et il faudrait continuer
l'analyse pour en favoriser une. La proposition n°2 paraît la plus
simple à réaliser et sera retenue pour la suite de cette
étude.
4.4. Boucle fermée avec correction sur les
courants :
Maintenant que nous avons choisi un type de
découpleur, nous pouvons refermer la boucle de régulation des
courants de Park à travers des correcteurs P.I. On schématise
l'ensemble :
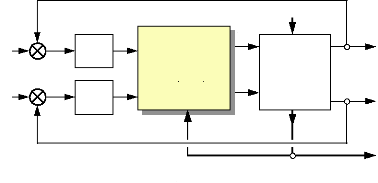
Trma
ids*
i qs
*
i ds
+
+
-
-
PI
PI
Découpleur
Linéarisant
vds
vqs
Moteur
Fintronic
i ds iqs
iqs
0)
0)
Fig.III-4.6
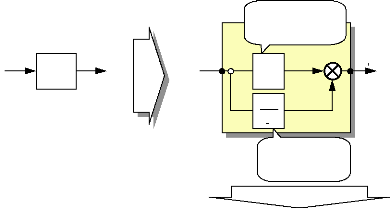
E ( p)
S( p)
+
Kp
+
K
p
i
Action proportionnelle
Dicte la rapidité de
réaction de
la
boucle
Action intégrale
Elimine l'erreur entre la
référence et la
sortie
En valeur instantanée :
PI
S( p)
E ( p)
s ( t) = K p e ( t) + Ki?e ( t)dt
Fig.III-4.7
Avec
5. REGULATION DE VITESSE.
5.1. Choix d'une régulation de vitesse [8]
:
Parmi les 2 types de régulation, proposés par
les figures III-5.1 et III-5.2, on utilisera celle qui est la plus
utilisée pour les entraînements de machines. C'est à dire,
la régulation à boucles multiples montées en cascade.
|
|
|
|
|
|
|
|
|
vds
vqs
|
Convertisseur
+
Moteur
Fintronic
|
|
Régulateur
de
vitesse
|
|
|
|
+
|
|
|
Régulateur
de
courant
|
|
|
Limiteur à seuils
|
|
-
|
|
|
|
|
|
|
ids i qs
|
|
|
|
|
|
|
|
|
|
|
|
+
0)*
0)
Fig.III-5.1 : Régulation à boucles multiples
en cascade.
(*
ids*
i*
qs
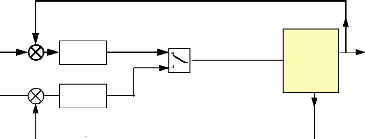
+
+
-
-
ids i qs
Régulateur
de
vitesse
Régulateur
de
courant
Commutation
vds
vqs
Convertisseur
+
Moteur
Fintronic
CO
Fig.III-5.2 : Régulation à
boucles en parallèles.
5.2. Schéma-blocs de l'ensemble
Moteur/Machine/Régulations : A partir des équations
mécaniques et électriques en III-34,
T em -- Tr
|
N ? J J ? d
1 ? ?
? ?
? dt f
? ?
m r
?? ??
p
|
|
T r = T r 0 + Trma T rma = T + kw
2 Tem = K T iqs
(III-34)
On obtient l'expression de la variation de vitesse du moteur
:
(KT i qs -- T r0 -- T) --
N k
p
co -- o)
J m + Jr J m + Jr
2
f
Np
do)
dt
J m + Jr
(III-35)
Traduit sous forme de schémas blocs et muni des boucles
de régulation Courant/Vitesse, on a le schéma suivant :
Limiteur à seuils
Fig. III-5.3
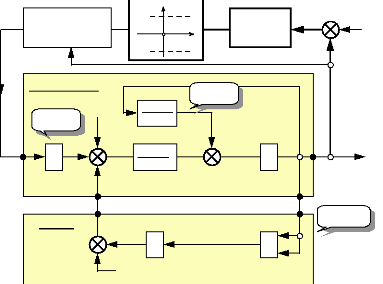
Régulateur
de courant avec
iqs
découpleur
Moteur Fintronic
Constante
de couple
Machine
KT
+
+
Tr0
?
Trma
-
-
+
iqs*
T
Imax
Imin
N p
J J
m + r
f
J m + J r
k
(A)
Frottements
visqueux
t
+
-
?2
Correcteur
PI
J
.
Equation
machine
+
-
(0*
0)
En supposant que découpleur joue efficacement son
rôle, on remarque que le courant ids n'intervient pas
directement sur le couple électromagnétique. On se retrouve dans
les mêmes conditions qu'une machine à courant continu.
Pour cette régulation, on utilisera un correcteur de type
Proportionnel-Intégral identique à la régulation des
courants.
Pour compléter la chaine de régulation, il est
nécessaire de rajouter un dispositif de limitation des variations
brutales de la consigne de vitesse. En effet, si le moteur est capable de
réagir très vite à un changement de consigne sur la
vitesse, il n'en est pas forcément de même pour la partie
mécanique de l'ensemble moteur/accouplement/machine.
Le moyen utilisé, pour réaliser cette fonction,
est un filtre du 1er ordre dont la
constante de temps 'E
est imposée en fonction de la rapidité souhaitée
et en fonction
n
des contraintes mécaniques à limiter. Si on
appelle n l'entrée du filtre et n
la
*
ré f
sortie du filtre, la fréquence de rotation obéit
à la loi :
* dn * dn*
n + t n ?
n ré f
dt
1
= (n n * ) : Filtre du 1er
ordre.
ré f ?
?
dt
n
(III-36)
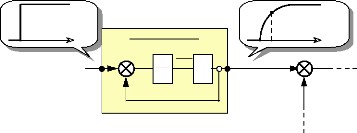
nréf
t
Filtre du 1er ordre
nré f
+
1
tn
dn
dt
*
J
-
n*
+
Cn
nré f
? n t
-
n
Fig. III-5.4
6. ONDULEUR DE TENSION.
6.1. Généralités :
Pour commander le moteur, il est nécessaire d'interposer
entre la commande et le moteur, un dispositif de puissance :
L'onduleur de tension controlé en courant.
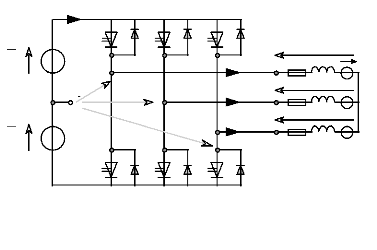
1
3
2
2
ias
Ls
Rs
va0
+
U
i
v cN = v cs
va0
U
2
0
vb0
vc0
ibs
ics
vb0
vc0
eas
N
ebs
ecs
-
1'
2'
3'
Fig.III-6.1
- 71 -
v aN = v as
v bN = vbs
+
+
Ceci nous amène à parler de la modulation de
largeur d'impulsions dont le rôle est de reconstituer au mieux une
onde sinusoïdale à partir d'une tension continue. Bien qu'il
existe, à l'heure actuelle, une multitude de variante d'ondes en M.L.I,
nous proposons une M.L.I dite « naturelle » à temps
réel. Elle se réalise, soit par un traitement analogique du
signal de commande qui est simple à réaliser mais limitée
dans ses possibilités, soit par un traitement numérique qui offre
des possibilités, bien supèrieures, adaptatives au fonctionnement
du moteur. En contrepartie, cette dernière solution nécessite des
moyens de calculs plus puissants donc plus onéreux (multiprocesseurs).
L'onduleur utilisé est généralement un onduleur de tension
triphasé en pont, constitué de 3 demi-ponts. Il est
schématisé de la façon suivante :
Le point 0, représenté sur le schéma,
est évidemment fictif. Il est uniquement utilisé par
commodité et permet, dans la représentation schématique,
d'obtenir une symétrie sur les ondes de tensions v
a0 , v b0 et v
c0 suivant l'axe des temps.
Sachant que l'expression des tensions aux bornes de chaque phase
du moteur est la suivante :
v v
= =
aN as
v v
= =
bN as
v v
= =
cN as
|
1 3 1 3 1 3
|
( 2 v v v
- - )
a 0 b 0 c 0
( +
v 2 v v
- )
a 0 b 0 c 0
? ? - +
v v 2 v )
a 0 b 0 c 0
(III-36)
|
|
Les tensions v , et v ne
peuvent prendre que 2 valeurs de potentiel : +U/2 et -
a0 vb0 c0
U/2. Il suffit d'appliquer une séquence de commande
des interrupteurs spécifiques à une commande du type
à modulation de largeur d'impulsions pour obtenir les
formes d'ondes de tension que l'on souhaite :
6.2. Onduleur à commande en M.L.I :
Pour l'ensemble des simulations, on utilisera une Modulation
de largeur d'impulsions basée sur le principe de la comparaison des
signaux de commande en tension du moteur avec celle d'un signal triangulaire de
fréquence fixe. Cette fréquence, m fois supèrieure
à la fréquence nominale, correspond à l'indice de
modulation de la M.L.I. Sa valeur sera entière et multiple de 3 de
façon à faire correspondre, à chaque période, la
forme du fondamental de l'onde à reproduire.
La M.L.I que nous utiliserons, se schématise de la
façon suivante [12] :
Bascules de Schmitt
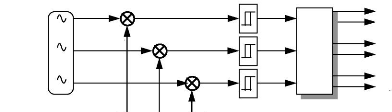
Tensions de
référence
Modulatrices
v M (t )
v P (t )
+
-
+
ebs1(t)
sbs1(t)
-
+
-
Commande
logique
cI1(t) cI1'(t)
I1
I1'
I2
I2'
I3
I3'
Porteuse
Tensions à
dents de scie
Fig.III-6.2
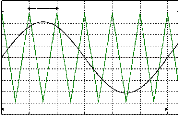
0 0.005 0.01
0.015 0.02 0.025
0.03
TP
VM
TM
VP
ebs1 : Entrée de la bascule
sbs1 : Sortie de la bascule
0 0.005 0.01 0.015 0.02 0.025 0.03
500 400 300 200
100
0
-100 -200 -300 -400 -500
800
600
+10 400
200
t 0
-200
-10 -400
-600
-800
|
|
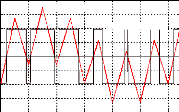
t
a) Ondes de tension de la modulatrice et de la b) Ondes de
tensions d'entrée et de sortie
porteuse d'une bascule
Fig. III-6.3
TM : Période de la
modulatrice ? 0,42 ms. TP : Période de la
porteuse ? 30 ms.
6.3. Commande en couple avec un onduleur de tension
à M.L.I ; Simulations.
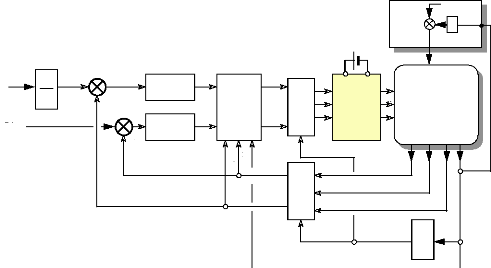
Idsref = 0
Tn*
1 KT
iqsref
+
-
+
6 iqs
bids
-
ids
Correcteur
PI
Correcteur
PI
uds
u qs
Découpleur
linéarisant
iqs
ids
?
?
i?ds -- ? ids
i?qs - iqs
v ? qs
'vds
?
0
[ P1 -1
[ P1
vMas
vMbs
vMcs
Onduleur
+
Cde
logique
U
vas
vbs
vcs
Machine
ias
ibs
ics
Modèle du moteur
discoïde à
réluctance
variable et
à aimants permanents
0
?
+
+
Trma
?
T
k
?
co
Fig.III-6.4 : Schéma synoptique de
la commande en couple du moteur
FINTRONIC.
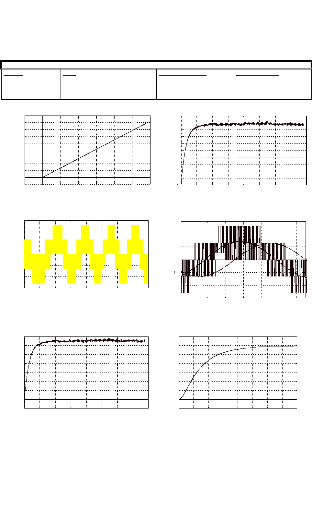
C a r a ctér istiq u e d e la machine e n tr a in
ée
(N .m )
(N .m )
Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
· Simulation n°1: Démarrage du moteur
sans à-coups de charge.
|
Données de la simulation : Commande en
couple.
|
|
Machine :
|
M.L.I :
|
Régulation de courant :
|
Conditions initiales :
|
|
Jr =0,2 kg.m2
T=0 N.m
k=0,408 N.m/rad.s-1
|
Fréquence de la porteuse : 2,4kHz Indice de modulation m
:48
|
Cdp=35 / Cdi=200 Cqp=17/ Cqi=350
*
T = Tn = 176 N .m
|
00 = 0 °
|
6 0 0
4 0 0
2 0 0
0
-2 0 0
-4 0 0
-6 0 0
vas
m 0 .0 1 0 .0 2 0 .0 3 0 .0 4 0 .0 5 0 .0 6 0 .0 7 0 .0 8
Tem p s (s )
d) Tension aux bornes de la phase as du
moteur :
vas( t ) .
(A )
iq s
0 0 .0 1 0 .0 2 0 .0 3 0 .0 4 0 .0 5 0 .0 6 0 .0 7 0 .0 8
T e m p s (s)
1 4
1 2
1 0
8
6
4
2
0
-2
2 0
1 0
-1 0
-2 0
1 8 0
1 6 0
1 4 0
1 2 0
T r m a (n )
1 0 0
8 0
6 0
4 0
2 0
0
-2 0
-1 0 0 1 0 2 0 3 0 4 0 5 0 6 0
F ré q u e n c e d e rotation (tr/m in )
a) Caractéristique de la machine
entraînée.
Trma ( n)
(A ) (V )
2 0 0
1 8 0
1 7 6
1 6 0
1 4 0
1 2 0
1 0 0
8 0
6 0
4 0
2 0
0
Tref
Tem
0 0 .0 1 0 .0 2 0 .0 3 0 .0 4 0 .0 5 0 .0 6 0 .0 7 0 .0 8
Temps (s)
b) Couple électromagnétique:
Tem( t ) .
(A ) (V )
600
400
00
0
00
-400
-600
0.066 0.068 0.07 0.072 0.074 0.076 0.078
vMas
vas
ias
10
-10
Temps (s)
e) Modulatrice de tension de la phase a ,
s
tension et courant :v Mas ( t ) , v as ( t
) et i as( t)
(tr/m in )
70
60
50
40
30
20
10
0
-10
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
T em ps (s)
n
g) Evolution de la fréquence de rotation du moteur lors
de la phase de démarrage: n( t ) .
Fig. III-6.5 : Résultats des simulations. Commande
en couple du moteur.
· La M.L.I provoque des oscillations de couple de #177;
5N.m (#177;2,8%) autour de 176N.m.
· La fréquence de commutation imposée par la
M.L.I est de 2,4kHz.
- 74 -
f) Courant de Park sur l'axe q : i qs ( t )
.
Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
· La vitesse qui évolue librement, atteint son
régime permanent en 60ms.
· La forme de ce courant correspond à l'image du
couple électromagnétique, à la constante de couple
près. Le découpleur a fonctionné correctement.
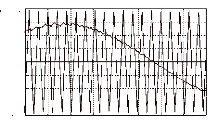
(V )
4 00
3 00
V P
2 00
1 00
0
t
-1 00
-2 00
V M as
-3 00
4 00
0.07 0.07 1 0.0 72 0.07 3 0.0 74 0.07 5 0.0 76 0 .077
Tem p s (s)
0
-600
0.07 0.071 0.072 0.073 0.074 0.075
Tem ps (s)
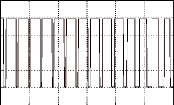
Comm a n de I1
a) Forme de l'onde de la porteuse et de la
modulatrice sur
la phase as.
(A )
15
10
5
0
-5
-10
-15
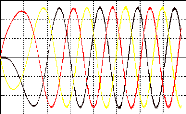
ibs ics ia s
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
Tem ps (s)
c) Evolution des courants de phase durant
le
démarrage du moteur : i as ( t ) , i bs ( t
) et i cs ( t).
b) Commande de l'interrupteur n° 1 du
pont
onduleur.
(A )
5
4
3
2
1
0
-1
-2
-3
-4
-5
0.06 0.062 0.064 0.066 0.068 0.07 0.072 0.074 0.076 0.078
id s
Tem ps (s)
d) Courant de Park sur l'axe d : i ds( t )
.
(° Angle interne du m oteur : D éphasage
Tension/f.e.m
80
70
60
50
40
30
20
10
0
-10
0 0.005 0.01
0.015 0.02 0.025 0.03
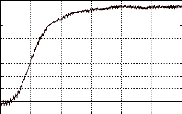
6
180 160 140 120 100
80 60
40
20
0
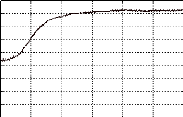
Tem ps (s)
(°) Angle de déphasage Rotor/stator
0.005 0.01 0.015 0.02 0.025 0.03
Tem ps (s)
D r
e) Evolution de l'angle interne durant la phase
de
démarrage du moteur : 6 ( t) .
f) Evolution de la position du rotor par
rapport au champ
stat. tournant : O r ( t) .
|
|
Fig.III-6.6 : Résultats des simulations. Commande en
couple du moteur. ? La position du rotor oscille de #177;4° autour de
sa valeur moyenne.
Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
· Simulation n°2 : Démarrage du moteur
avec à-coups de charge de 50N.m.
Données de la simulation : Commande en
couple.
|
Machine :
|
M.L.I :
|
Régulation de courant :
|
Conditions initiales :
|
Jr =0,2 kg.m2
T=0/+50N.m
k=0,408 N.m/rad.s-1
|
Fréquence de la porteuse : 2,4kHz Indice de modulation m
:48
|
Cdp=35 / Cdi=200 Cqp=17/ Cqi=350
T * = 120 N. m
|
00 = 0 °
|
|
140
120
100
80
60
40
20
0
(N .m ) (tr/m in )
A-coups de charge de 50N .m
Tref
T em
n
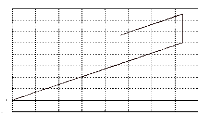
(N .m )
1 6 0
1 4 0
1 2 0
1 0 0
8 0
6 0
T r m a (n )
4 0
2 0
0
2 0
t > 3 5 m s
t < 3 5 m s
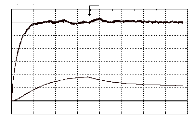
-20
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
Temps (s)
a) Couple et fréquence de rotation :
Tem (t ) et n
(t)
.
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0
F ré q u e n c e d e rotation (tr/m in ) (s)
b) Caractéristique de la machine : T
rma(n).
Fig.III-6.7 : Résultats des simulations. Commande en
couple du moteur.
6.4. Commande en vitesse avec un onduleur de tension
à M.L.I ; Simulation.
· Simulation n°3 : Démarrage du moteur
sans à-coups de charge et de vitesse (Onduleur à
M.L.I).
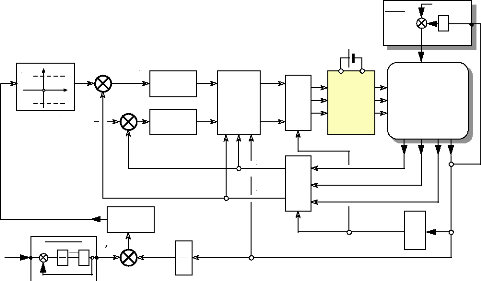
nref
tr/min
Limiteur à seuils
Imax
Imin
+
(A)
Filtre du 1er ordre
-
1
sn
Idsref = 0
t
dn
dt
*
iqsref
?
+
n
-
correcteur
PI
+
+
?iqs
?ids
-
ids
En
-
Correcteur
PI
Correcteur
PI
n
60
2.11
uds
u qs
Découpleur
linéarisant
?
iqs
ids ?
i ?ds -- ids
i?qs = iqs
v?qs
?vds
0
0
[ P? ?1
[P]
vMas
vMbs
vMcs
Onduleur
+
Cde
logique
U
vas
vbs
vcs
Machine
ias
ibs
ics
Modèle du moteur
discoïde à
réluctance
variable et
à aimants permanents
0
J
+
+
Trma
?
T
k
?
CO
Fig III-6.8: Schéma synoptique de la commande en
vitesse du moteur FINTRONIC.
- 76 -
Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
Données de la simulation : Commande en
vitesse.
|
Machine :
|
M.L.I :
|
Régulation de courant :
|
Régulation de vitesse:
|
Jr =0,2 kg.m2
T=0 N.m
k=85.10-5 N.m/rad.s-1
|
Fréquence de la porteuse : 2,4kHz Indice de modulation m
:48
Conditions initiales :
|
Cdp=35 / Cdi=200
Cqp=14/ Cqi=0
Seuils de limitation:-13A/+13A
|
Tn=0,01s
Cvp=1,5 / Cvi=3,5 n*=60tr/min
|
|
|
70
60
50
40
30
20
10
0
-10
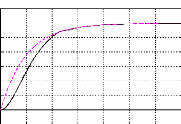
(tr/m in)
n
*
n
1 80
1 60
1 40
1 20
1 00
8 0
6 0
4 0
2 0
0
-20
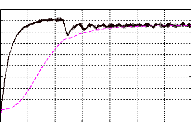
(N .m )
Tem
T r
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
Temps (s)
a) Fréquence de rotation du moteur et
sa
référence : n (t ) n ( t ) .
*
et
(N .m )
140
120
100
80
60
40
20
0
-20
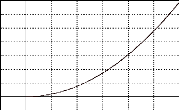
T rm a (n)
-10
40
20
10
60
50
30
0
F réquence de rotation (tr/m in)
a) Caractéristique de la machine entrainée
:
Trma( n).
13 0 0
400
200
0
-200
-400
-1300
0.013 0.0131 0.0132 0.0133 0.0134 0.0135 0.01313
0.0137
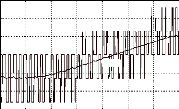
va s
v M a s
Tem ps (s)
c) Modulatrice et tension de phase : v Mas
( t)
et v as (t ).
Temps (s)
0 0 .0 1 0 .0 2 0 .0 3 0.04 0.05 0 .0 6 0 .0 7
b) Evolution dans le temps du
couple
électromagnétique et du couple résistant
:
Tem (t ).
1300 400 200 0 -200 -400 -1300
(V )
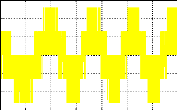
vas
0 0.01 0.02 0.03 0.04 0.05 0.013 0.07
Tem ps (s)
b) Tension aux bornes de la phase as du
moteur :
v as (t ).
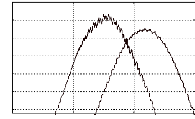
300
v M a s
250
ias
200
1 5 0
100
50
0
0.045
0.05
0.055
Tem ps (s)
d) Détails sur les ondes de tension
(modulatrice) et
de courant de la phase as :
i as(t ) et
v Mas(t ).
Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
(A) Angle interne : Sigma
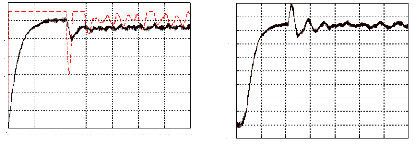
iqs
iqs*
14
12
10
8
6
4
2
0
90
80
70
60
50
40
30
20
10
0
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
Temps (s)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
-10
e) Courant de Park sur l'axe q et sa
référence:
i qs (t ) et i
qsref (t ) .
thetar (°) Temps (s)
f) Evolution de l'angle interne durant la phase
de
démarrage du moteur : 6 (t) .
ids (A)
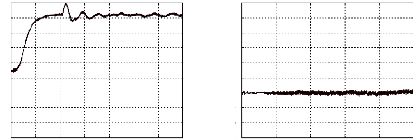
180
160
140
120
100
80
60
40
20
0
12
10
8
6
4
2
0
-2
-4
-6
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0 0.01 0.02 0.03 0.04
0.05
Temps (s) Temps (s)
g) Evolution de la position du rotor par h) Courant de Park sur
l'axe d : i ds (t ).
rapport au champs statorique tournant: Or (t
).
Fig. III-6.11 : Résultats des simulations. Commande
en vitesse du moteur.
7. REMARQUES ET CONCLUSION.
Cette étude permet de juger les performances
théoriques du moteur, associé à une commande en
couple et en vitesse avec capteur mécanique.
Les remarques importantes que l'on peut faire sur les
simulations sont les suivantes :
· Le moteur FINTRONIC est plus favorable à une
commande en couple, ce qui confirme son appellation de moteur "couple". Les
résultats sont satisfaisants pour la commande en vitesse.
· Qu'elles que soient les contraintes de couple, le moteur
a su réagir efficacement avec des délais très
raisonnables, inférieurs à 30ms.
Chapitre 3 : Commande vectorielle avec capteur
mécanique - Mémoire CNAM Patrick BOIDIN.
.
· Le moteur a besoin d'une commande en M.L.I pour
limiter au mieux les harmoniques de courants et surtout les à-coups de
couple. Les moyens en informatique, à notre disposition, ne permettent
pas d'utiliser une M.L.I à une fréquence plus
élevée que celle utilisée de 2,4 khz. Compte tenu des bons
résultats obtenus, on peut s'imaginer que les résultats seraient
bien meilleurs à des fréquences supérieures.
· La remarque précédente nous motive
à écarter la solution du contrôle des courants par
"hystérésis". En effet, cette méthode ne permet
pas de contrôler suffisamment bien les harmoniques de courant, pour
favoriser son emploi.
· Qu'elle que soit la position initiale du rotor,
imposée avant chaque démarrage, le comportement du moteur n'a pas
varié.
· Muni d'un découpleur linéarisant, le
moteur discoïde et sa commande deviennent assimilables à un moteur
à courant continu. L'inconvénient principal de ce
découpleur réside dans l'estimation de la valeur numérique
des paramètres du moteur. En supposant que ces paramètres
évoluent en fonction des données tel que la température ou
autres, il faudra réajuster les valeurs en conséquence. Cette
condition impose de bien connaître les caractéristiques
électriques du moteur considéré ou d'intégrer dans
la commande du moteur des opérations de mesures des paramètres
électriques.
· Le moteur a besoin d'être régulé
avec beaucoup de souplesse pour des fonctionnements dont le couple
résistant est faible. En effet, si les paramètres des correcteurs
optimisent les fonctionnements à fortes charges, le moteur aura tendance
à pomper en dépensant inutilement de l'énergie sous forme
de pertes magnétiques aux faibles charges. Dans cette situation, on
devra adapter les paramètres des correcteurs au cas de fonctionnement
donné. On appelle cette commande,
Commande adaptative.
En conclusion, la commande vectorielle s'adapte assez bien
au moteur FINTRONIC, à condition de connaître à chaque
instant, la position du rotor. La structure de cette commande est simple
à élaborer, comparée à celle d'une commande
vectorielle de machine asynchrone. Néanmoins et sans pouvoir le
démontrer dans ce mémoire, le moteur perd très vite ses
performances, à des vitesses supérieures au nominal. Une
étude est nécessaire pour ce cas de fonctionnement.
CHAPITRE 4
COMMANDE SANS CAPTEUR
MECANIQUE DU MOTEUR
FINTRONIC
ET
FILTRE DE KALMAN
1. INTRODUCTION.
Dans cette partie d'étude, on défini une
commande sans capteur mécanique du moteur FINTRONIC. Cette
commande est testée par une série de simulations sous
MATLABSIMULINK dont on présente les résultats. Le chapitre
précédent nous a montré que le capteur de position et de
vitesse était indispensable à la fonction d'autopilotage et
à la régulation de vitesse. Or, les difficultés
rencontrées pour définir le capteur standard et compatible avec
le prototype, nous conduit à étudier un moyen technique de
substitution. Pour cela, on utilise un algorithme de
contrôle-commande du type :
filtre de Kalman.
2. LE CAPTEUR DE POSITION. 2.1. Le capteur et son
rôle :
Le capteur mécanique que nous proposons de
définir avant de le remplacer, doit détecter la position
angulaire du rotor par rapport à un repère fixe du moteur. On
rappelle que le rotor est soumis à une fréquence de rotation
nominale de 60 tr/min pour une fréquence électrique de 64Hz.
2.2. Résolution du capteur :
Le nombre de pas du moteur est de 64. Cela signifie que pour 1
tour mécanique du rotor, le champ statorique a fait 64 tours
électriques. En imposant un pas de mesure de 1 degré
électrique (1pt/°) qui correspond à une précision de
60'(minutes) et 360 pts sur le tour électrique, il faudrait une
résolution de 23 040 points de mesure par tour mécanique (64x360)
pour assurer le fonctionnement correct du moteur.
5,625° méca. 360°
méca.
1 tour électrique 64 tours
électriques
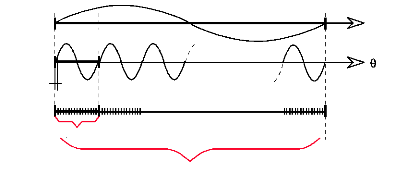
1 tour mécanique
0
9mec
360° élec.
1pt/° élec.
360pts
360x64= 23 040pts
Fig.IV-2.1
Or, le traitement des informations du capteur doit
nécessairement se faire sur 15 bits au minimum (215=32 768
pts).
2.3. Choix du type de capteur :
Il est possible de choisir parmi l'une de ces 3 catégories
de capteurs "standard":
1. Le capteur de position angulaire du type codeur rotatif
incrémental : La position angulaire est définie par un
nombre d'impulsions sur le tour mécanique.
2. Le capteur de position angulaire du type codeur rotatif
absolu : La position angulaire est définie par un mot binaire de x
bits dans le tour absolu.
3. Le capteur de position angulaire de type
résolveur : La position angulaire est fournie par 2 signaux
analogiques (en cosinus et en sinus), porteurs de l'information de position. Un
traitement du signal est nécessaire pour ce type de capteurs.
2.4. Le codeur rotatif incrémental :
Les plages de résolutions les plus courantes,
proposées par les fournisseurs, sont comprises entre 50 et 10 0000
points par tour mécanique. Au-delà de 5 000 pts, le capteur
devient sophistiqué et coûteux. Le principal inconvénient
de ce capteur est de fournir une position relative par rapport à
un point de référence "Top 0" qui se situe dans le tour
mécanique. Tant que ce "Top 0" n'est pas sollicité, le moteur est
commandé de façon aléatoire. Or, cette phase transitoire
est d'autant plus longue que le nombre de paires de pôles du moteur est
grand. Dans notre cas, cette phase peut durer prés d'une seconde (60
tr/min. = 1 tr/s). Evidemment, Cet inconvénient n'est pas
tolérable pour une commande performante du moteur FINTRONIC.
2.5. Le codeur rotatif absolu :
Ce type de capteurs est proposé avec une
résolution maximale et courante de 4 096 pts/tour mécanique ;
C'est un codeur à 12 bits. Au-delà de cette résolution, le
prix du capeur devient injustifié pour des projets comme le notre. En
exemple, on peut citer HEIDENHAIN qui propose des capteurs 15 bits (32 768
pts/tour) pour un montant H.T. de 8 000 francs, l'unité. Ce
matériel est aussi cher que le variateur de vitesse, lui-même. De
plus, les informations doivent être traitées non plus sur 12 bits
mais sur 16 bits. Par contre, le codeur absolu supprime l'inconvénient
du cas précédent : L'autopilotage du moteur peut se faire
instantanément sans phase d'incertitude et la position angulaire du
rotor est déterminée dans le tour absolu.
2.6. Le résolveur :
Le résolveur est un capteur
électromagnétique qui a l'avantage d'être dépourvu
de toute électronique embarquée. Par sa constitution et par sa
construction, il s'apparente fortement à un moteur synchrone dont on a
mis en quadrature, deux phases statoriques. L'inducteur est alimenté par
une tension alternative soumise à une fréquence maximale de
10kHz. On retrouve le principe du résolveur à travers cette
figure :
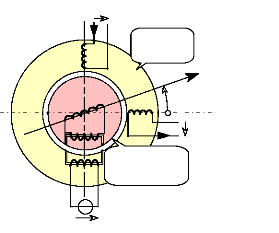
vs1
Signal de sortie
capteur
Partie fixe
solidaire du bati
moteur
Axe en rotation
Stator
Rotor
°mé c
Axe fixe de référence
vs2
Signal de sortie
capteur
Partie mobile
reliée mécaniquement
au rotor
du moteur
V e ( 10kHz)
Signal d' entrée
Fig.IV-2.2 : Capteur de position type
"Résolveur".
L'amplitude des tensions de sorties de ce capteur varie en
fonction de la position du rotor. La modulation de ces amplitudes permet de
déterminer la position du rotor par rapport à un axe de
référence du résolveur. La fréquence de la
modulatrice permet d'obtenir la fréquence de rotation du moteur tandis
que la fréquence de la tension d'entrée, donne la
résolution. Elle correspond à 10000 50
variations pour 3 000
tr/min, soit 200 pts par tour mécanique. On peut atteindre
5 000 pts/tour mécanique en ajoutant au dispositif, un module
électronique dit "de positionnement".
L'inconvénient principal de ce capteur est de fournir une
mauvaise précision de la mesure aux basses vitesses.
En préliminaire, on constate que les capteurs
proposés ne conviennent pas tout à fait au prototype : La
résolution de 4 096 pts/tour n'est pas suffisante comparée aux 23
040 pts/tour recherchés. Néanmoins, une solution consisterait
à augmenter le rapport des vitesses en interposant entre le moteur et le
capteur, un train d'engrenages.
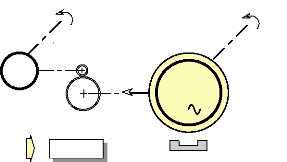
Train d'engrenages
R=4
Codeur
12bits
MS
3
Aimants P.
4 tours mécaniques
1 tour mécanique
1,41°/pts
Fig.IV-2.3 : Capteur de position avec train
d'engrenages.
2.7. Conclusion :
Pour installer un capteur de position sur le prototype, il
faut un codeur rotatif absolu à 12 bits (- 4 000 francs.) mais sans son
train d'engrenages. En effet, ce dispositif augmente la résolution du
capteur mais augmente aussi sa sensibilité face aux imperfections du
train d'engrenages (jeux) et aux vibrations mécaniques parasites du
moteur. La solution sans engrenage permet de filtrer naturellement la mesure de
la position qui est détectable à environ #177; 3° de l'angle
électrique. Cette solution s'oppose, néanmoins, à une
commande optimale.
3. RECONSTRUCTION DE LA POSITION DU ROTOR AU MOYEN DU
RECONSTRUCTEUR D'ETAT.
3.1. Le reconstructeur et son principe, appliqués
aux systèmes linéaires :
Un reconstructeur d'états [13][14]
est un dispositif capable d'estimer une ou des grandeurs
d'états non mesurables d'un système, à partir des
grandeurs mesurables dites observables. Cette définition fait
apparaître la notion d'estimation. Le problème essentiel
d'une valeur estimée est de pouvoir juger son degré de
fiabilité. Pour cela, on se sert d'une autre grandeur du système
qui est estimable et mesurable pour corriger les estimations des
grandeurs non mesurables à travers des gains de correction.
Un reconstructeur d'états est donc un
estimateur à la fois correcteur des variables
d'états. On schématise le principe par le schéma suivant
:
Réseau

Cde
MS
3
Grandeurs
mesurables
Grandeurs
estimées
Reconstructeur
Estimation
+
Correction de l'erreur
Fig.IV-3.1 : Principe du reconstructeur.
L'idée du reconstructeur consiste à
reconstruire l'ensemble des variables d'état du
moteur
contenant les grandeurs non mesurables. On le fait partiellement ou en
totalité. A partir de la représentation du moteur
par le modèle d'état, on schématise le principe du
reconstructeur d'états dans sa phase estimation
[15]:
u( t )
i( 1(t)
+
Estimateur
g ? t ?
+
f ?t)
?
C
y? ( t)
Variables de sortie
estimées
à
valeurs observables
sur le processus
Variables de sortie
de l'estimateur
à
valeurs non-observables
estimées
u( t)
Processus
u( t)
g ? t ?
+
v(t)
+
+
x? ( t )
f ?t)
J.
x(t)
Variables de sortie
du processus à
valeurs
non observables
C
+
w( t)
+
y(t)
Variables de sortie
du processus à
valeurs
observables
Fig. IV-3.2 : Le processus et son estimateur fonctionnant en
parallèle.
Nota :
· La moins mauvaise estimation d'un bruit, agissant sur un
système, consiste à la supposer nulle. C'est pourquoi les
vecteurs "bruits" v( t) et
w( t) du système à variables
estimées, n'apparaissent pas dans l'estimateur.
· u (t ) correspond au vecteur
d'entrée du système dont les variables sont fonctions du temps.
Les variables peuvent être les tensions ou les courants.
· y (t ) et x (t
)correspondent au vecteur de sortie et au vecteur d'état du
système dont les variables sont fonctions du temps. Ces variables
peuvent être les tensions, les courants, la position et /ou la vitesse
angulaire.
Le moteur et l'estimateur obéissent aux 2 systèmes
différentiels suivants :
|
d
dtx t f t x t g t u t v
t
? ? ? ? ? ? ? ? ? ? ? ?
? ? +
y t C x t w t
? ? ? ? ? ?
? +
|
et
|
d
dt = 71(
+
y t C x t
? ? ? ? ?
= ?
|
|
|
|
(IV-1) : Processus et estimateur.
Nota :
La matrice C est
considérée à coefficients constants.
Or, dans cette configuration, rien ne nous permet de
vérifier si les valeurs estimées sont fiables ou non. Il faut
rajouter un dispositif de vérification et de correction des variables
d'états estimées :
u( t)
Processus
u( t) + i(
t) 1( t)
u( t)
Reconstructeur d'états
g( t)
g( t)
+
v( t)
+
+
+
x? ( t )
K
Gain de Correction
Nouvelle
estimation
f( t)
f( t)
I
I
+
x( t)
+
x? c (
t)
C
Ancienne
estimation
C
C
y( t)
E y ( t)
y? ( t)
+
y( t)
w( t)
+
+
-
Variables de sortie
du processus A
valeurs
observables
Variables de sortie
de l'estimateur A
valeurs
estimées non corrigées
observables
sur le
processus
Variables de sortie
de l'estimateur A
valeurs
non-observables
estimées et corrigées
3%c(
t)
Fig.IV-3.3 : Processus avec son reconstructeur
d'états.
Reconstructeur d'état :
d
dt
isk( t ) = f ( t ) l4 t ) + g ( t ) u ( t) A t ) =
C ii( t)
(IV-2)
Vérification de l'erreur sur
la sortie :
Ey ( t ) = y( t ) -- y? (
t)
(IV-3)
Correction de l'estimation du
vecteur d'état :
?x c ( t ) = ?x( t ) + K
E y ( t) ? Nouvelle estimation.
(IV-4)
Le principal inconvénient de cette méthode est
de conserver constant dans le temps, les coefficients de la matrice de gains de
correction. Il faut nécessairement optimiser la valeur de ces
coefficients, quel que soit le fonctionnement du moteur.
De plus, la mesure des grandeurs observables doit être
la plus précise possible pour permettre une comparaison efficace sur les
sorties et permettre une commande toute aussi efficace de l'estimateur. Il est
important de préciser qu'un reconstructeur d'état fait appel
à des moyens de calculs sophistiqués dont les temps de calculs
dépendent essentiellement de l'ordre du système = D'où
l'utilisation d'un microcontrôleur spécifique, propre à
cette fonction. Le traitement de l'information, au moyen d'un pC, impose que le
système continu soit converti en un système discret. On obtient
ainsi une nouvelle représentation du système différentiel.
Pour cela, on pose :
x? tk) =
xk , avec k correspondant au pas
d'échantillonnage à l'instant tk. On obtient
[13] :
k k
e g ? ? u ? ? ? d ? e
f k
( , )
? f k
( , )
?
? ? ? ? ? v(T)) dT
k-1 k-1
? 1
x k e f k k
( , ) ?
? x ?
?
k 1
?
(IV-5)
Le 1er terme de l'expression (IV-5) correspond
à la solution générale du système
différentiel sans second membre.
ef ( k , k-
1 ) correspond à la matrice de transition du
système (passage de
xk_1 à
xk). On notera ce vecteur :
f k k
( , )
? f k
( , )
?
? ? k ,k ?1 ? ? ? ? k k
? e
, ? 1 ?
1 et ? ? k ?
, e
?
?
(IV-6)
Le 2ème terme du second membre de l'expression (IV-5)
correspond à la solution particulière du système
différentielle avec second membre tenant compte de la condition
initiale. Durant la période comprise entre les 2 pas
d'échantillonnage k et k-1, on peut considérer que
u(ti) est resté constant. D'où :
|
k ? k
? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
? g u d
? ? ? ? ?
? ? k g
? ?
k , ? ,
k ? 1 ? k-1
|
1
d u k g d k u k
? ? ?
? 1 ( ) ?
? 1 1
?
|
|
(IV-7)
Le 3ème terme du second membre est mis sous la
forme :
k
v d k ? ? ? v ? ? ?
1 ? ? ? ? ?
( ? ) k ,
k-1
|
dr
|
(IV-8)
Le système différentiel, représentant le
processus et le reconstructeur, devient sous la forme d'un système
discret suivant :
Processus (moteur + machine) :
1. Estimation sous forme de prédiction
:
2. Mesure des grandeurs de sortie mesurables et
comparaison :
(IV-11) : Cy ? k) ? y ? y --
?
k k k
/ 1
3. Réajustement des estimations :
X k k X k k K y k y k k
? = ? ( ? )
+
/ / ? 1 / _ 1
et
y / C X /
? k k = ? k k
(IV-12)
X = I , _ X + g u
k ( )
k k 1 k _ 1 d k
? ?
? 1
y C X w
= +
k k k
Reconstructeur d'état
(IV-9) :
:

X + g
( )
k k
, -- 1 k k
? ?
1 1
/ d k
? ?
? 1
y ? = C X ? k
k
/ ? 1
k k
/ -- 1
(IV-10) :
X ? _ I ?
k k
/ ? 1
u k --1
+ v
k -- 1 d k
(
- 1)
Nota:
Pour éviter des confusions, nous avons rajouté
volontairement un terme supplémentaire en indice à chacune des
variables discrètes ? X k/ k (2ème
k). En effet, ce terme correspond au pas
d'échantillonnage pour lequel on a réalisé les mesures.
Ceci nous permet de savoir si l'estimation est réalisée avant ou
après la mesure.
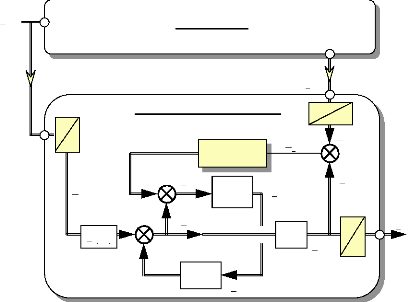
u( t)
t
k
uk?1
gd k_1
( )
+
Reconstructeur d'état
discrêt
+
+
+
Processus
? X k/ k
? X k/ k? 1
? ( k , k-1)
K
Gain de Correction
Retard
? X k ? 1 / k ? 1
? X k ? 1 / k ? 1
yk
+
? y( k)
C
y( t)
y k k- 1
/
?
t k
-
?
y k k- 1
/
k
t
y? ( t)
Fig.IV-3.4 : Reconstructeur discret.
Pour mieux comprendre le rôle du reconstructeur, on
detaille de façon chronologique et sous forme de schema, les differentes
tâches a realiser par le 1.1C.

111(k,k-1)
O( k +1,k9
tk-1 Matrice de
transition tk Matrice de transition
tk+1
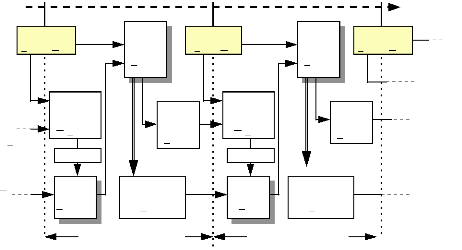
...
x k - 1 /k-2
y
k- 1 /k-2
Mesures de yk-1 et uk-1
Détermination
de
l'erreur
6 y ( k- 1)
Estimation
de
x ? k- 1 /k - 1
Correction
Tâches à réalisées
par le
microcontrôleur
dans l'intervalle de temps
Mise en mémoire
de
Estimation
de
? x k/ k-1
x k/ k-1
?
Estimation
de
yk /k-1
Mesures de yk et
uk
Détermination
de
l'erreur
C y(k)
Estimation
de
x ? k / k
Correction
Tâches à réalisées
par le
microcontrôleur
dans l'intervalle de temps
Mise en mémoire
de
Estimation
de
? x k+1/k
x k+1/k
?
Estimation
de
,,
yk+1/k
Mesures de yk+1 et
u k+1
Temps en P s
t k -1, t k t k , t k
+1
Instant oil les données sont
saisies par le
microcontrôleur
Fig. IV-3.5 : Tâches réalisées par un
reconstructeur d'état.
Pour ameliorer l'idee du reconstructeur d'etat precedant, nous
proposons d'utiliser une methode qui consiste à tenir compte de toutes
les variables aleatoires susceptibles d'integrer des erreurs dans les
differentes estimations. La methode proposee est :
la méthode de Kalman.
4. RECONSTRUCTEUR D'ETAT EVOLUE DU TYPE « FILTRE DE
KALMAN ».
4.1. Principe du filtre de Kalman :
Le principe adopte par Kalman consiste à adapter la
valeur des paramètres de la matrice de gains K,
à chaque pas d'echantillonnage. Les valeurs adaptees sont fonctions de 3
critères :
1. La confiance que l'on donne,
à la determination de la première estimation par anticipation,
avant correction et à la seconde estimation, après correction.
Cette confiance dépend, elle-même, de la confiance
que l'on donne au pas précédent, modérée par
l'erreur observée sur cette confiance.
Ce critère de confiance est traduit par
Kalman par une matrice que l'on note
P.
2. Le niveau d'influence des différents
bruits imposés au système, compte tenu que
l'estimateur du cas précédent n'en tenait pas compte directement.
Pour matérialiser ces bruits, on peut citer comme exemple sur les
moteurs, les bruits occasionnés par un balourd sur le rotor qui va
provoquer des à-coups de couple. On rappelle que par définition,
un bruit défini un comportement aléatoire traduit sous forme de
signal dont la valeur et son évolution ne peuvent pas être
prédites avec exactitude.
L'influence des bruits du système, sur le
filtre, est traduite par Kalman par
une matrice que l'on note Q.
3. L'influence des bruits sur les
mesures qui faussent la correction de l'estimation.
L'influence des bruits de mesures sur le filtre est traduite par
Kalman par une matrice que l'on note R.
La méthode de Kalman fait appel à des notions de
statistique (espérance, variance et covariance) que nous avons
préféré présenter en annexe.
4.2. Le filtre de Kalman associé aux
systèmes linéaires [14] :
Les matrices P, Q et
R conditionnent la matrice de gain du filtre
K. En plus des
données propres au filtre de Kalman, nous imposons les
hypothèses simplificatrices suivantes :
? Les bruits imposés au système
vk et les bruits de mesures w
k sont des bruits blancs.
D'où, par définition, l'espérance de ces
variables aléatoires est nulle :
E{ vk } = 0 et E(
wk } = 0
(IV-13)
On suppose que les bruits de mesure n'auront pas d'influence
sur les bruits du système et vice et versa = La matrice de
variance-covariance des bruits est donc à coefficients nuls :
cvw
? ? T
= E ??? v w ??? = 0
(IV-14)
? On supposera que les bruits de mesures n'auront pas d'influence
sur l'erreur initiale de la variable d'état estimée et vice et
versa. D'où :
E w x T
??? ? ? ??? ? avec x x
x
?
0 0 = 0 - ? 0/ 0
0
(IV-15)
Les variables aléatoires du vecteur « bruits de
mesures » sont supposées indépendantes entre elles. Les
coefficients de covariance de la matrice de variance-covariance de ce vecteur
sont nuls. Seuls les coefficients sur la diagonale de la matrice (coefficients
de variance) sont différents de 0. Il en est de même pour les
variables aléatoires du vecteur « bruits sur le système
». D'où :
[
[
=
k
10 °T
cvv = E iv k vk
1= E {v k v kT} =
Q
q1 k 0 . 0
i1L
0 q 2k . 0
0 0 0 qnk
(IV-16)
et
I ,, ,, T
cww E iw k
wk
}= E w w
? ?
T ? ?
R
k k k
r1 k 0 . 0
0 r 2k . 0
r 1 ? 1 L
i?
? ?i
k
. .
0
r3
rnk
0 0 0
(IV-17)
Nous venons de définir les matrices
Qk et Rk qui
représentent successivement l'influence des bruits sur le système
et l'influence des bruits sur les mesures.
· D'après l'expression (IV-16), on définit la
matrice de variance-covariance de l'erreur sur la première
estimation (avant correction) du vecteur d'état par:
T
P k / k -1 = E x k -- x k /k _1 x k -- xk/ k
_1
(IV-18)
A partir des expressions (IV-5), on en déduit une
nouvelle expression :
P k k ? ? k k ? P k k ? ?
? T
?

/ ? 1 , ? 1 ? / ?
1 1 k , k ? 1 ? Q 1
d ( k ? )
Matrice de variance-covariance del'erreurr sur
la1èree estimation
(IV-19)
L'expression précédente ne suffit pas
pourdéterminerrPk / k-1,' Il
fautconnaîtree
l'expression deQd (k k1))qui
correspond à la forme discrète de Qkk1. A partir
dee
l'expression (IV-4) et des propriétés sur les
variables aléatoires, on en déduit :
k
? ?
? k ? Q ? ? ? k ? d
T
v(t) v Q
d ( k -1 ) d ( k , k-1 )
? ? , ? ? ? ?
,
k- 1
(IV-20)
· Selon lecritèree des variances minimales,
Kalman a pudéfinirr la matrice des gains de correction par :
K k P k k C ? C P
T T
? C R ?
? k
/ 1
? k k
/ 1
?
-1
(IV-21)
· Dès lors, il est possible d'en déduire
la matrice de variance-covariance de l'erreur sur la deuxième estimation
du vecteur d'état. On obtient :


?P k / k = Pk/k-1 -- Kk C P k/k-1
Matrice de variance-covariance de l'erreur sur la
2ème estimation
(IV-22)
Nous venons de définir la matrice
P, représentant la confiance apportée
aux 2 estimations du vecteur d'état et la matrice
Kkreprésentant les gains de
correction.
Nota :
P0/0 représente la
1ère confiance sur l'estimation des variables d'état
estimées (Matrice des conditions initiales). x0/0 :
Matrice des conditions initiales du vecteur d'état du processus (moteur
+ machine).
x0/0 : Matrice des conditions
initiales du vecteur d'état à variables estimées.
L'évolution de la matrice de gains est
schématisée de la façon suivante :
Q0
R0
P0/0
Kk 6 y(k)

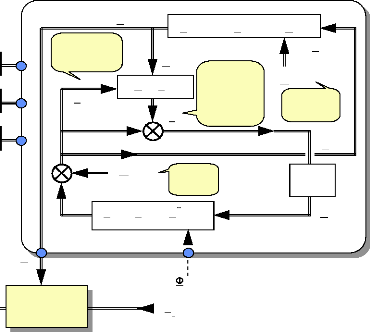
Matrice de
Gains de Correction
Matrice de Kalman
Kk
Représentatif des
erreurs sur la
première
estimation des
variables d'état
+
Pk/k-1
+
(1)( k, k -1 ) P k -1 / k-1 a ( k , k-1)
Kk
Q d ( k --1)
Kk C Pk/k-1
Pk/k
+
+
Kk
?y(k)
Représentatif
des bruits
sur le système
P k / k-1 C T [ C P k /k-1 C T #177; Rk]
(k,k-1)
Représentatif des
erreurs sur la
deuxième
estimation des
variables d'état
Rk
Représentatif
des
bruits de mesures
Retard
? 1
Pk/k-1
Pk - 1 /k-1
Pk/k-1
P k k E ? ? x k x k k ? ? ? x k x ?
? ?
T
? ? ? ? ? k /
k
/ /
Fig.IV-4.1 : Adaptation des gains de correction des
systèmes linéaires d'après la
méthode de
Kalman.
4.3. Le filtre de Kalman étendu aux
systèmes non linéaires [14][16] :
Le principal avantage de cette méthode est de pouvoir
l'étendre aux systèmes non linéaires : Matrice
d'évolution du système dépendante des variables
d'états. Néanmoins, il est impératif de satisfaire une
condition pour adapter réellement cette méthode : Connaître
au moins une solution approchée du système différentiel
que l'on notera xref et que l'on appellera « solution
de référence ».
Tout d'abord, on admet que le système d'équations
différentielles puisse se mettre sous la forme continue suivante :
t ) = f ( x ( t ), u ( t ), t ) + v ( t)
t ) = Cx ( t ) + w ( t) (inchangé )
x? (
y(

(IV-23)
On fait correspondre x 0 re f à la
matrice des conditions initiales du vecteur de référence
xref : Vecteur « solution approchée » du
système. Le but consiste à ramener le système
précédant non linéaire à un système
linéaire afin d'utiliser la méthode de Kalman. Pour cela, on
remplace le vecteur d'état par un nouveau vecteur, correspondant
à l'écart entre le vecteur d'état et son vecteur de «
référence »: x -- xref. Cela revient
à faire la différence de chaque terme des 2 systèmes :

x?(t ) = f( x (t ), u (t ), t) + v
(t) et ?x ref (t ) = f( x ref (t ), u
ref (t ), t)
(IV-24)
On obtient ainsi:
x?(t ) --
*ref (t ) = f(x (t ), u (t ), t ) --
fk ref (t), u ref (t), t ) + v (t)
(IV-25)
A partir de cette nouvelle expression matricielle,
l'idée consiste à remplacer le 2ème membre (sans les
bruits) par son développement en série de Taylor, réduit
au premier ordre.
Mise en application, cela nous donne :
+
+...
v ( t)
? f x t u t t
( ), ( ),
ref
? ? ? ? ?
ref
f x t u t t f x t u t t x t x t
? ( ), ( ), ? ?
? ( ), ( ), ? ?
? ( ) ? ( )
ref ref ref
a x ref (t)
f x t u t t
ref
? ? ?
? ( ), ( ), ? ?
ref
? u t u t
( ) ? ( )
ref
a u ref (t)
(IV-26)
Nota :
La formule mathématique de Taylor correspond
à f ( b ) = f ( a ) + [( b - a) / 1 !] ? ( ) ? ... ? [( ? ) / !]
( )
f a b a n f a
n n
On peut faire une approximation, en supposant que les
entrées imposent de faibles perturbations sur le système. On
supprime donc le dernier terme de l'expression (IV-26). De plus, on a
uref(t) = u(t) .

On obtient ainsi et sous une autre forme :
a[ f (x t u t t ? ? ? ? ?
f x t u t t ? ?
ref ( ), ( ),
ref ( ), ( ),

-- % ( t X 0) +
) + x( t) -- --
ref
a x ref (t) ref a x
ref
( t)x ( t) +
(IV-27)
Or, en posant :
? ? ? ?
? f x t u t t ? ?
ref ( ), ( ),
F t x t
, ( ) ?
x ref ? x t
ref ( )
|
: Fonction "aux dérivées partielles" de
f.
|
|
(IV-28)
Et en linéarisant le système en imposant des
faibles variations à x( t) autour de la trajectoire
de référence x ref ( t ) (on ne tient plus
compte des premiers termes de chaque membre de IV-27), on a :

x?(t ) = Fx (t, x
ref (t)) x(t)+ v (t)
(IV-29)
Si les valeurs approchées de x 0 ref
sont suffisamment voisines de celles de
?x0 estimés
(x 0 -- x 0 ref x 0 --
x?0), on peut espérer
qu'il en sera de même, à chaque instant, pour
x ref (t ) et
x?(t ) . Dans ce cas, on
remplace le vecteur de référence par l'estimation du vecteur
d'état. On linéarise autour de cette estimation et le nouveau
système linéarisé devient :
x?(t ) f t , x ( t ) x ( t ) v ( t
)
? ? ? ?
y ( t ) = Cx ( t ) + w (t)
x t F t x t x t v t
?( ) ? ? ?
, ?( ) ( ) ( )
?
x
y t Cx t w t
? ? ? ? ? ?
? ?
?

Avec
? ? ? ?
? f x t u t t
?( ), ( ), ? ?
F t x t
x , ?( ) --? x t
?( )
On a remplacé xref par
x?
u( t) = U :Matrice à termes
constants
(IV-30)
De la même façon que pour les systèmes
linéaires, on discrètise le système. On en déduit
l'ensemble des équations du filtre de Kalman étendu aux
systèmes non linéaires:
Processus (moteur + machine) :
x ? k k x ? x
? ? , 1 , ? ? 1
? ? v
k k d ( k ? 1 )
y k = C x k #177; wk
(IV-31):

Avec
(IV-32) : ? ? k k x ? eF x k k
x
( , ,? )
?
, ? 1 , ? ? 1
Filtre de Kalman étendu :
1. Estimation sous forme de prédiction
:
(IV-33) :
|
x ? ? ,
? ? k k x
? 1 , ? ? ?
x
k k
/ ? 1 k k
? ?
1 1
/ k k
? 1 / ? 1
y ? k / k-1 = C xk /k-1
|
|
|
|
2. Mesure des grandeurs de sortie mesurables et
comparaison :
(IV-34) : ? y ? k ? = y - y --
k k k
/ 1
3. Réajustement des estimations :
? ( ? )
(IV-35) : ? x k k = x k k ? + K k y
k - C x k / k 1
/ / 1 _
et
(IV-36) : ? y/ C x /
k k = ? k k
4. Matrice de variance-covariance de l'erreur sur la
1ère estimation du vecteur
d'état :
(IV-37) : P k k ( k k x ) P ( k k x )
Q
T
, ? , _ 1 , ?
+
= , _ 1 ?
/ -- 1 k k
1 1
/ k k
1 1
/ k k
1 1
/ d k
_ _ -- -- _ _ ( )
? 1
Avec
(IV-38) : Q ( k k x ) Q ( k k x )
T
= , _ 1 , ? , _ 1 , ?
/ + Q
-- 1 k k
1 1
/ k _ 1 k k
1 1
_ _ _ _
d k
( ) k -- 1
5. Matrice de gains de correction
(inchangée):
? 1
(IV-39) : Kk P k k C [ C
P
T C R ]
T
= + k
/ 1
-- k k
/ 1
--
6. Matrice de variance-covariance de l'erreur sur la
2ème estimation du vecteur
d'état (inchangée) :
(IV-40) : P k/ k = P k / k-- 1 -

Kk CPk /k ? 1
On représente le fonctionnement du filtre de Kalman
étendu aux systèmes non linéaires, sous forme de
schéma-blocs :

u( t)
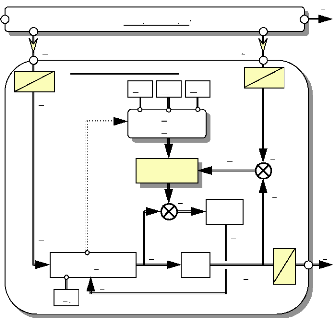
t k
uk?1
uk?1
u( t)
c1 ( k , k _ 1 , ? xk_
1/k_1)
x0
Filtre de Kalman étendu
? x k_ 1/ k_1
Processus
P0/0
Kk
Gains de Correction
? x k/ k_1
+
+
Pk/k-1 Pk / k
Q0
? x k/ k
R0
C
Retard
6 y( k)
x ? k_ 1/ k_1
y ( t)
y k k- 1
/
?
t k
+
yk
-
?
y k k- 1
/
k
t
y ( t)
y? ( t)
Fig.IV-4.2 :Filtre de Kalman étendu.
5. APPLICATION DU FILTRE DE KALMAN.
Pour cette etude, il est necessaire de definir les elements de
l'estimateur et le referentiel avec lequel, on fera evoluer le système
à variables estimees.
· L'estimateur est commande à partir des tensions
d'entrees. Le couple resistant, impose par la machine entraînee,
constitue l'une des variables d'entree du système = Les tensions et le
couple resistant forment le vecteur d'entrée u
du système. Les tensions sont mesurees et transmises, en temps reel,
à l'estimateur.
Pour eviter un couplemêtre à la machine (capteur
mecanique), on suppose que les caracteristiques de la machine entraînee
sont connues. La machine est definie par sa constante de vitesse
k repondant à la relation : Trma =
kw2.
· La frequence de rotation du moteur et la position du
rotor seront les 2 grandeurs à estimer. Elles constituent, avec les
courants, le vecteur d'état x.
· Les courants sont les grandeurs observables et
constituent le vecteur de sortie y.
5.1. Choix du référentiel pour le filtre
de Kalman :
La situation ideale consisterait à utiliser le
referentiel de Park avec l'axe d, cale sur le rotor.
Neanmoins, cette solution n'est pas compatible parfaitement avec une commande
sans capteur. Pour cela, on justifie cette remarque à partir de la
figure suivante qui represente la commande du moteur dans le referentiel de
Park :
+ -
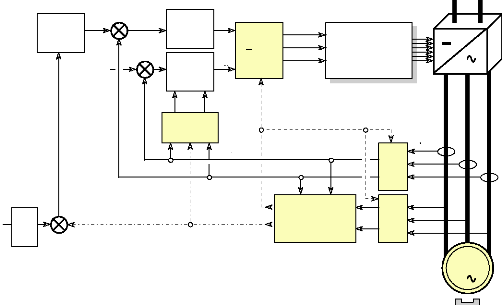
n*
2n Np
Régulateur
de
Vitesse
+
-
eco
ids *= 0
i*
qs
iqs
+-
ids
+-
6 iqs
cids
?eds
Découpleur
Régulateur
de
Courant
iqs
Régulateur
de
Courant
ids
oi
?eqs
'vqs
?vds
i' = i qs qs
i?ds = ids
3
2
Oi
0
0
[ P1 -1
Estimateur
de Position
angulaire
électrique
du rotor et de
vitesse
*
vas
vbs
*
vcs
*
iqs
Séquenceur/Modulateur
ids
MOTEUR DISCOïDE
A AIMANTS ALTERNES
Circuit
de
Commande
vds
vqs
0
[P1
[ P?
0
vcs
vbs
vas
ias
ibs
ics
MS
3
Aimants P.
Fig.IV-5.1 : Filtre de Kalman dans le
référentiel de Park.
· Les 4 entrées de l'estimateur et les 2 tensions
de référence en entrées de l'onduleur sont tributaires de
0? (estimé). Or, en reprenant les
équations de Park sur les courants,
on remarque que chaque terme de ces équations est
fonction de ?0. On s'imagine très facilement
qu'une erreur d'estimation sur la position initiale du rotor puisse avoir des
répercutions très importantes sur l'évolution du
reconstructeur d'état, par rapport au système réel (cumul
des erreurs). De plus, les corrections sur les erreurs d'estimation
sont tributaires des courants mesurés qui sont,
eux-mêmes, dépendant de ?0.
· On rajoute que le référentiel de Park
tourne à la vitesse angulaire du rotor à partir d'une position
initiale estimée. Or, une erreur sur cette première estimation
peut décaler l'axe d par rapport à l'axe du
rotor, avec toutes les conséquences que cela suppose. La commande
vectorielle dans Park est très efficace dans des conditions normales de
fonctionnement et l'est, d'autant plus dans son erreur.
La seule condition qui permettrait d'utiliser le filtre de
Kalman, avec le référentiel de Park, serait d'imposer une
position initiale au rotor au premier démarrage. Pour empêcher
d'éliminer un trop grand nombre d'applications industrielles pour
lesquelles on ne tolère pas les déplacements
préliminaires, on décide d'éliminer cette solution. On se
résigne à changer de référentiel. Or, le choix du
référentiel de base (as,bs,cs)
nécessite d'augmenter l'ordre du système et par
conséquent, les temps de calculs (3 équations sur les courants au
lieu de 2). On élimine aussi cette possibilité.
On propose de conserver le référentiel de
Park. Néanmoins, l'axe d de ce référentiel n'est plus
calé sur le rotor mais fixes par rapport à l'axe as.
On a ainsi des grandeurs instantanées, projetées sur les 2 axes,
indépendantes de la position du rotor. Ce référentiel que
nous retenons pour la suite de l'étude, fait appel à la
transformation de "Clarke" et utilise les repères d'axes
(as,f3s,os) et non plus (d,q,o). La commande
du moteur, pour sa part, se traite dans le repère de base
(as,bs,cs).
5.2. Détermination numérique des
équations du système différentiel à variables
estimées dans le repère (as,f3s) :
Après avoir traité en annexe 3 la
transformation de Clarke, on présente le nouveau système
différentiel à variables estimées et optimisées
suivant :
Réseau
?
di
a

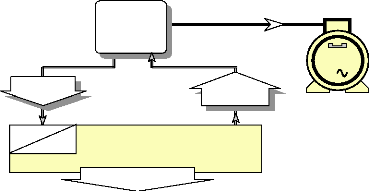
(a s,b s,cs)
(as,13s )
v as , v bs , vcs i as ,
i bs , ics
Fi l tre de Kalman
Système à variables estimées
Cde
'11aim , R~s,L~s,K~T,
J~, T~ro, T~, k~
A A
i i
as , ps
0, 6i
0, 6
MS
3
Fig. IV-5.2
s (t ) R~ ,s
dt

s
-- si a,s( 0+
ditraim 2
sind( t) + v as( t)L~L~L ss

di0
?
dt r
s
(t ) R~s » "
(t)
-- i Ps (t)-6ittfai
m v 2 COSO(t) + Ps
s
L ~ L ~
s s
d o3s(
t ? ? ? ? ? ? ? ? ? ? ? ? ? ?
N p
? J K i t t i t
? ? t f t T T k t
? ? ? ? ? 2
~ ~ ? cos ? ? ? sin
? ? ~? ~ ~ ~ ? ? ?
?
T s
? ? s r 0
dt
A
dt
t)
_ (B(t)
(IV-41)
Avec J~ = J~m + J~r
Nota:
Attention aux notations, on a volontairement dissocier les
variables à valeurs estimées optimisées (
(0) et les constantes
estimées(~Ls).
On remarque que la présence de 6 et de
6 fait de ce système, un système
différentiel non linéaire. On applique ainsi la
méthode de Kalman [16]. On pose :
f x t u t t ? ?( ), ( ), ?
|
,
|
=
|
r
1
1
1
L
|
f x t u t t
? ?( ), ( ), ?
1
f x t u t t
? ?( ), ( ), ?
2
f x t u t t
? ?( ), ( ), ?
3
f x t u t t
? ?( ), ( ), ?
4
|
1
1
1
L
|
(IV-42)
Avec :
inu n t)
= 6( 0
f1
f2
f3
f4
Et :
Chapitre 4 : Commande sans capteur mécanique
du moteur et Filtre de Kalman.
I3s (
· t) -- 05( 0 11* L
aim 2 cose( t ) + vf" (t)
R~
d v5(t)
ii( 0, u ( t ),
t)
ii( 0, u ( t ), t)
= -
ii( t ), u ( t ), t) = -- KT 3.( t ) sin
k° + KT ; ( t )costi( t) --
3p [1-+ kdi( t)]
(IV-43)
6 ( )
t
t)1 ( t
v as v ps
(
f 1 of 1 012 af1 013 af 1 a
ax1 af 3 ai2 af 3
ai3 af 3 ai
a
a
a
4
4
4
0
Nota: v as et v
as sont des variables d'entrées à valeurs
réelles (non estimées). On a :
f 2 af 2 a12 af 2 a13 af t
as ( 0
1 0 0 =
",
Jos ( t )'tr [0 1 0 u ( t)
(IV-44)
, 4
ST
( t )
a
i s
( t)
0
(t)
L
i( t)
s
( V'
1_1
af (t , i(t))
F 1(t) _
aI(t)
af 4 ai1 af 4 ai2 af 4 ai3 af
4 ai4 (IV-45)
L
Avec :
a
f1
a
a
x1
f2
a
3 Np
a x - _ KT
sin0
a ? f N N
3 p 3
f N p
? ?
t ; ? ? ~ ~ cos ? ;
? ? ? ~ ~ ?
K ? ? ?
t 2 k t
? ? ?
T
? x J ? x J
2 3
? p ~
a
J~
? f
f 3
pitcos 6(t
-- KT 3p inPs(t) sin
es( t)
4
4
a x T Xas
f4 f f4
0
· -- 0 ; -- 1 ; "
=0
^ -
1 a x 4 2 ax 3 ax
(IV-46)
Pour effectuer les différents calculs au moyen d'un
traitement numérique, on utilise les méthodes suivantes :
- 99 -
a
-- K
--
a
a
f
a
4
R~
a f1
0
· " -- --
·
·
9 a x 2 t
9
af 2 --im 2 cos
ós of
ai3 -- L~
a
f2
R~
( t) ; -- 6( t) aim 2
sine( t)
a x
4 ts
; -
t a x
0 ;
af Taim 2 sin 0
af xi°
ai3 L- ~s
x
2
t
)
;
--6(0 aim
2cos0(t)
s v.% #177; as (
t)
R~
i as + 60) L 2 sin 0 ( t )
Lis L~s
s
= -
a
a
1. Calcul de l'évolution des variables d'états
f ( x?(t ), u (t ), t)
:
Méthode d'Euler ?
Evolution de
f ( X( t ), u ( t ), t ) ik / k -1 = ik -1 / k -1 + T (
k , k -1 ) * f ( ik -1 /k -1 , uk-1 ,k -- 1)
(IV-47)
Avec
T(k,k-1) = tk-1 -- tk : Pas
d'échantillonnage.
2. Calcul du vecteur de transition ?? k , k -- 1 , X) =
eFx(...) :
Méthode des développements limités ?
x 2
(Dl ( e x) = 1+ x+ 2 ! +... )
F1 ( t , 1( 0) 4:11(k , k -- 1 ,
ik _1 / k_1 ) = I + T ( 10k-1 ) *
F ( k -- 1, ik _1
/k_1)
(IV-48)
|
|
Nota : On limite la précision au
2 premiers termes du développement.
3. Calcul du vecteur de variance-covariance
Qd(k-1) représentatif des bruits sur le système
vd (k- 1 ) :
Méthode des trapèzes ?
|
v( t ) v d ( k -1 ) Q
d ( k , k-1 )
|
k
? ?
? k ? Q ? ? ? k ? d
T
? ? , ? ? ? ? ?
,
k-1
|
|
Q d ( k , k-1) =[4:11(k , k -- 1 ) * Q *
0T(k , k -- 1) + Q]
(IV-49)
|
* T( k , k-1)
2
|
Ces méthodes de calculs seront utilisées, par la
suite, dans le filtre de Kalman.
5.3. Commande du moteur dans le repère (as,bs,cs)
:
On associe au filtre de Kalman étendu une commande
classique dans le référentiel
(as,bs,cs). Ce paragraphe est ainsi
consacré à la présentation de cette commande. On utilise
une M.L.I pour le contrôle des courants et on impose une commande
à couple maxi de façon à limiter au mieux les pertes
magnétiques. Les équations électriques et
mécaniques, du système à commander dans le repère
(as,bs,cs), sont définies par les
relations :
R1 ?
s aim
? ? t L 2 sin ? ? ? ? ?
t v t
? 1
L i t L v t ? ? ? ? ? ? ?
as as
s s s

)
di as (t
_ --
dt
R 1 ? ? 4 ? ?
s aim
L i t L v t
? ? ? ? ? ? ?
? ? t L 2 sin ? ?
t ? v ? ?
t
cs cs 3
?? ? ?? ?
3
s s s

)
di t
bs (
_ --
dt
1 ? ? 2 ? ?
aim
? ? ? ? ?
? ? t L 2 sin ? ?
t ? v ? ?
t
?? ? 2
3 ?? ?
s
R
s
? ?
t L v t
L i bs bs

)
di cs (t
_ --
dt
d t
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
N p 2
? J K i t cos ? t i t
? ? sin ? t f t T T k t v t
? ? ? ? ? ? ? ? ? ? ?
?
T s
? s r 0 4
dt
d0(
dt
t) -- co( t ) + v 5( t)
Modèle du processus
Nota: Les courants des 2
repères sont liés par la transformation de Clarke (voir annexe
3).
(IV-50)
v1( t), v2( t) , v3(
t) , v4( t) , v5( t)
représentent les bruits du système, fonctions du temps (bruits
blancs).
5.3.a) Régulation des courants ias, ibs et
ics avec compensation des f.e.m [11] :
Contrairement à la commande vectorielle, il
n'est pas possible de découpler le courant qui créé le
flux magnétisant du moteur et le courant qui créé le
couple. Néanmoins, pour améliorer la commande classique, nous
pouvons intégrer à la régulation des courants, un
dispositif de compensation des perturbations imposées par les
f.e.m du moteur. On sait que la tension de la phase as du moteur
correspond à :
di
dt

v as = R s i as +
Ls
6)Waim 2 sin ö
as
(IV-51)
6 et 0 sont les variables
estimées, fournies par le filtre de Kalman.
Nous cherchons à dissocier de l'évolution du
courant le dernier terme de cette expression. Il en est de même pour les
autres phases du moteur.
Nota : Cela revient à
linéariser les courants par rapport aux tensions d'entrées.
Concrètement, on cherche à agir sur le moteur non
plus par les tensions v as,
vbs
et v mais par les nouvelles
tensions, notées u , u , et pour
lesquelles, on
bs ucs
cs as
impose les relations suivantes :

as as -- 6 Taim 2 sinO
v bs = ubs -- 6 Taim 2 sin (6
-- 27c
3
4n
v

cs = u cs -- W6
aim 2 sin (ii --
3
(IV-52)
Ainsi, le système différentiel sur les courants se
simplifie et devient :
i
i


di (t)
as - R~s
_ --
dt L~
di bs (0 R~s
_ --
dt L~
1
as (t ) + L~ u as(t)
s
s
1
bs ( t ) #177; _, u bs(t)
s
s

R~
)
i
_ --
s
cs
L~
s
di cs (t
dt
1
(t )+ L~ u cs(t)
s
(IV-53)
On schématise le principe par la figure suivante :
Fig.IV-5.3 : Commande du moteur avec compensation des
perturbations.
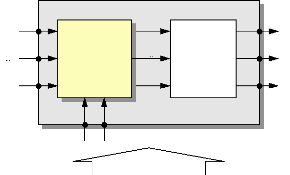
uas
ubs
ucs
Compensateur
63 6
Moteur + Compensateur
de perturbations
vas
vbs
vcs
Moteur
Fintronic
ias
ibs
ics
5.3.b) Générateur de
références sur les courants [11] :
Contrairement à une commande vectorielle, les
références sur les courants ne sont plus à valeurs
constantes mais à valeurs sinusoïdales. Il faut créer un
générateur de références pour la commande du
moteur. On réalise ce générateur selon le critère
optimal de fonctionnement présenté au début de ce
paragraphe ; C'est à dire à couple maxi pour un fonctionnement
donné.
Pour cela, il faut revenir sur l'idée de la commande
vectorielle pour rappeler que
le couple maximal s'obtient pour un courant
maximum porté par l'axe q du
référentiel de Park. Le principe reste le
même pour notre commande, sinon qu'il n'est plus possible d'agir
directement sur ce seul courant d'axe q, dissocié du
reste mais sur les 3 courants du repère (as,bs,cj.
Une telle commande est bien trop compliquée à définir pour
les régime transitoires, c'est pourquoi, on se limite à une
commande élaborée sur l'unique fonctionnement du régime
permanent. On présente l'idée à partir d'une
construction vectorielle de Fresnel:

Information connue
à partir de l'estimateur
-,
Vs
0?
?
'I'
2
q
-,
Is
as (fixe)
Fig.IV-5.4 : Construction vectorielle
-
D'après cette construction, on remarque que pour
maintenir le vecteur courant I s
d
(? t

Vrai uniquement
en
régime permanent
(? t
suivant l'axe q (couple maxi), il est
nécessaire d'imposer un décalage avance de ce
vecteur de
90°par rapport à l'axe du rotor qui lui même tourne à
. Cela revient
?? t
à maintenir l'angle N' à
zéro. Remarque :
Dans les cas oü les variations sur la charge sont brutales,
les risques de décrochage du rotor sont à craindre. Il faut se
prémunir de ce risque en maintenant ? voisin de 0 mais
différent de 0..
En considérant que la position estimée du rotor est
définie à chaque instant (filtre de Kalman), on peut s'imposer un
courant de référence de la forme :
? ? ?
iasréf. = I s 2 cos ?? NJ -
-
2 ? ? ?? ? i as ré f=
- I s 2 sin ?
( ?
? ?
-
(IV-54)
Avec
? ? 0


De la même façon, on obtient les courants de
référence sur les autres phases du
moteur, en les
déphasant de 2t 3 et de 4 ir 3 par
rapport au courant de la phase
as.
T i

Sachant que I 2 = max ; K
étant la constante de couple, on peut alors
s T
T
représenter le générateur de
références de la façon suivante :
K
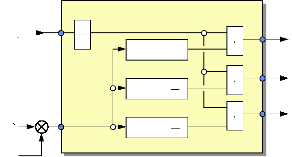
w réf
Tmax i réf
0
+
-
1
KT
Générateur de
références
?
sin (d --v -- 3
sin (6' -- v -- ) 3
-- sin (6 - ? ?
.
.
.
ias
ibs
ics
réf
réf
réf
Fig.IV-5.5 : Générateur de
références.
5.3.c) Synoptique de commande du moteur dans le
repère (as,bs,cs) :
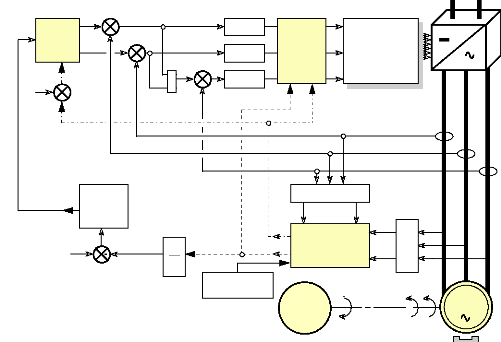
Tmax iréf
? réf
= 0
Générateur
de
références
n réf
-
+
0
ibs réf
+-
ias réf
Régulateur
de
Vitesse
+
Limiteur
+
En
+ -
n?
T rma= Tu = T +
kifi2
-
-
1
2n
ics réf
+ -
??
k
Constante de vitesse
de la machine
Correcteur
PI
Correcteur
PI
Correcteur
PI
ubs vbs
uas
ucs
??
0
Compensateur
de f.e.m
Machine
ics
ibs
ias
Estimateur
reconstructeur d'état
FILTRE
DE
KALMAN
ias
[ Cla?
0
vas
vcs
Trma
i?s
Moteur discoïde
à réluctance
variable
et à aimants permanents alternés
Circuit
de
Commande
+
M.L.I
vas
vos
Tu
[ Cla?
n
vcs
vbs
vas
+
MS
3
Fig.IV-5.6 : Schéma synoptique de la commande en
vitesse et à couple maxi du moteur, muni
du filtre de Kalman.
Mémoire CNAM Patrick BOIDIN.
5.4. Validation théorique (simulation) de la
commande du moteur avec filtre de Kalman :
5.4.a) Commande en vitesse du moteur avec retour de la
vitesse par le filtre de Kalman (bfesmli.m + filtre1m.m en annexe 4)
:
? Démarrage du moteur, soumis à un échelon
de vitesse de 60 tr/min et sur une charge de la forme : Trma
= T + kw2 .
|
Données de la simulation : (Filtre :EULER/
Moteur+Cde : EULER)/Tk=30 jis : Pas d'échantillonnage
|
|
Machine :
|
Régulation de vitesse :
|
Régulation de courant :
|
Variance-Covariance (coefficients sur la
|
|
J r = 0,1 kg.m2
Trma=130 N.m maxi T=0 N.m
M.L.I :
|
?n =0,010 s
kvp=20/ kvi=90
nréf=60 tr/min
Conditions initiales :
|
kp=130
ki=65
Seuils de limit.-300/300N.m
?réf=0
Filtrage des tensions :
|
diagonale):
P0/0 :700 (Confiance sur la 1ère estimation) Q0 : 6
(bruits sur le système)
R0 : 500 (bruits sur les mesures)
Bruits blancs de mesure :
|
|
00 estimé (filtre)=0 °
00 réel=-30 °
|
|
fp=2,4kHz(fixe)/Up=410 volts
|
Ib max : 0,38A pour In=9,3A
Vbmax: 1,5 volts pour Vn=220 volts Bruits blancs sur le
système :
|
|
fc : 1,5kHz / Ordre : 2
|
|
voir fichier Metafile en annexe 4.
|
Trma en fonction de la vitesse thétha0
réel=-30° Tem et Tr en N.m thétha0 réel=-30°
P0=700/Q0=6/R0=500/Tk=30micro sec. n (tr/min)
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
a) b)
n et n estimé (- -) en tr/min. thétha0
réel=-30° theta et theta estimé (- -) en degré
thétha0 réel=-30°
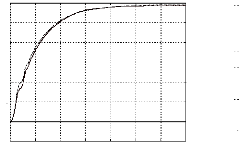
n estimée
n
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
60
50
40
30
20
10
0
-10
400
350
300
250
200
150
100
50
0
-50
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
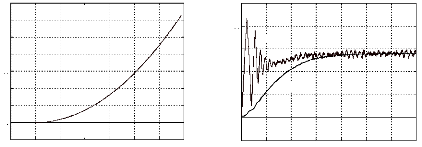
140
120
100
80
60
40
20
0
-20
-10 0 10 20 30 40 50 60
Tem
Tr
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
250
200
150
100
50
0
-50
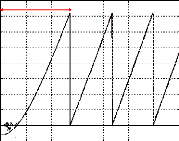
0 estimée
0
1er tour ? 27 ms
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
c) d)
Fig.IV-5.7 : Cde en vitesse du moteur avec retour de
0et n par le filtre de
Kalman.
· Les 2 caractéristiques n (t)
et n estimé (t) se suivent assez bien. La
vitesse estimée est légèrement en avance sur la vitesse
réelle.
Mémoire CNAM Patrick BOIDIN.
· L'erreur de position du rotor de
-30°, imposée au démarrage, a
été corrigée par le filtre en moins 10
ms.
Erreur sur la vitesse en tr/min. thétha0
réel=-30° Erreur sur la position en degré thétha0
réel=-30°
|
0.5
0
-0.5
-1
-1.5
-2
-2.5
-3
|
|
5 0 -5 -10 -15 -20 -25 -30 -35 -40
|
|
|
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
|
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
|
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
a)
A partir de 20 ms, l'erreur sur la
vitesse est
devenue inférieure à 1%.
ias et is en A thétha0 réel=-30°
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
b)
L'erreur sur la position du rotor est
inférieure
5° sur le tour électrique.
ialpha et ibeta en A thétha0 réel=-30°
|
15 10 5 0 -5 -10 -15
|
|
20 15 10 5 0 -5 -10 -15
|
|
|
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
|
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
|
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
c) d)
e)
On relève une différence notable entre
les
courants i?s et
i?s estimé d'environ
#177;14%.
f)
On relève la même différence entre
les
courants i ? s et i ? s estimé
d'environ #177;14%.
Mémoire CNAM Patrick BOIDIN.
ias (A) / -eas (V)
60
40
20
0
-20
-40
-60
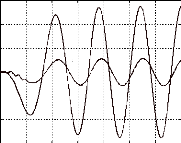
- eas
ias
vas filtrée (V) / ias (A) / -eas (V)
300
vas filtrée
- eas
0
ias
-100
-200
-300
200
100
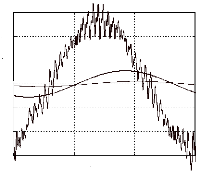
045 0.05 0.055
Temps (s)
h)
0.06
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
Temps (s)
g)
On releve un léger retard du courant sur
la
f.e.m ? La commande n'est pas tout à fait à
couple
maxi.
vas en volts thétha0 réel=-30°
vas en volts thétha0 réel=-30°
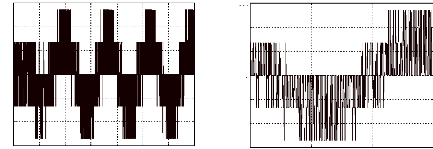
600
400
200
0
-200
-400
-600
600
400
200
0
-200
-400
-600
|
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
|
0.055 0.06 0.065 0.07
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
|
i) j)
Fig.IV-5.8 : Cde en vitesse du moteur avec retour de
0et n par le filtre de
Kalman.
Les tensions telles qu'elles sont vues par le moteur, ne sont pas
exploitables par le filtre de Kalman (ondes générées par
la M.L.I). Il faut les filtrer.
Nota :
On a volontairement indroduit une erreur de -30° sur la
position du rotor par rapport à la position estimée de 0°.
On a obtenu d'assez bons résultats.
Mémoire CNAM Patrick BOIDIN.
· Démarrage du moteur soumis à un
échelon de vitesse de 60 tr/min et inversion du sens de rotation sur une
charge de la forme : T rma = T + kw2 .
|
Données de la simulation : (Filtre :EULER/
Moteur+Cde : EULER)/Tk=30 jis : Pas d'échantillonnage
|
|
Machine :
|
Régulation de vitesse :
|
Régulation de courant :
|
Variance-Covariance (coefficients sur la
|
|
Jr =0,1 kg.m2
Trma=130 N.m maxi T=0 N.m
M.L.I :
|
?n =0,010 s
kvp=20/ kvi=90
nréf=60 et -60 tr/min
Conditions
initiales :
|
kp=130
ki=65
Seuils de limit.-300/300N.m
?réf=0
Filtrage des tensions :
|
diagonale):
P0/0 :700 (Confiance sur la 1ère estimation) Q0 : 6
(bruits sur le système)
R0 : 500 (bruits sur les mesures)
Bruits blancs de mesure :
|
|
00 estimé (filtre)=0 °
00 réel=-30 °
|
|
fp=2,4kHz(fixe)/Up=410 volts
|
Ib max : 0,38A pour In=9,3A
Vbmax: 1,5 volts pour Vn=220 volts Bruits blancs sur le
système :
|
|
fc : 1,5kHz / Ordre : 2
|
|
voir fichier Metafile en annexe 4.
|
Trma en fonction de la vitesse thetha0=-30°
150
100
50
0
-50
-100
-150
-60 -40 -20 0 20 40 60
P0=700/Q0=6/R0=500/Tk=30micro sec. n (tr/min)
a)
n et n estimé (- -) en tr/min. thetha0=-30°
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
c)
Tem et Tr (- -) en N.m thetha0=-30°
|
300
200
100
0 -100 -200 -300
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
b)
theta et theta estimé (- -) en degré
thetha0=-30°
|
400 300 200 100
0 -100 -200 -300
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
d)
Fig. IV-5.9 : Cde en vitesse du moteur avec retour de
0et n par le filtre de Kalman.
Inversion
du sens de rotation
La vitesse estimée a parfaitement suivie la vitesse
réelle lors de l'inversion.
Mémoire CNAM Patrick BOIDIN.
Erreur sur la vitesse en tr/min. thetha0=-30°
|
0.5 0 -0.5
-1
-1.5
-2
-2.5
-3
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
a)
L'erreur sur la vitesse est inférieure
à
0,5tr/min soit moins de 1%.
ias et is en A thetha0=-30°
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
c)
Erreur sur ialpha estimé en A thetha0=-30°
|
10
8
6 4 2 0 -2
-4
-6 -8 -10
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
e)
Erreur sur la position en degré thetha0=-30°
|
5
0
-5 -10 -15 -20 -25 -30 -35 -40
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
b)
L'erreur sur la position est inférieure à
5°sur
le tour électrique.
ialpha et ibeta en A thetha0=-30°
|
20
15
10
5 0 -5 -10 -15 -20 -25
|
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
d)
|
Erreur sur ibeta estimé en A thetha0=-30°
|
10
8
6 4 2 0 -2 -4
-6 -8 -10
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
f)
Fig.IV-5.10 : Cde en vitesse du moteur avec retour de
0et n par le filtre de
Kalman.
Inversion du sens de rotation
Mémoire CNAM Patrick BOIDIN.
600
400
200
0 -200 -400 -600
ias en A et eas en volts thetha0=-30°
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
a)
vas en volts thetha0=-30°
|
600
400
200
0 -200 -400 -600
|
|
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
c)
vas filtrée et eas en volts thetha0=-30°
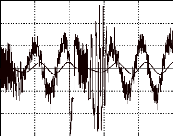
600
400
200
0
-200
-400
-600
0 0.02 0.04 0.06 0.08 0.1
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
b)
vas en volts thetha0=-30°
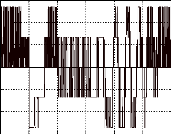
0.04 0.045 0.05 0.055 0.06 0.065
P0=700/Q0=6/R0=500/Tk=30micro sec. Temps (s)
d)
Fig.IV-5.11 : Cde en vitesse du moteur avec retour de
0et n par le filtre de
Kalman.
Inversion du sens de rotation
· Démarrage du moteur, soumis à un
échelon de vitesse de 60 tr/min. La position initiale estimée du
rotor correspond à la position réelle.
|
Données de la simulation : (Filtre :EULER/
Moteur+Cde : EULER)/Tk=30 jis : Pas d'échantillonnage
|
|
Machine :
|
Régulation de vitesse :
|
Régulation de courant :
|
Variance-Covariance (coefficients sur la
|
|
Jr =0,1 kg.m2
Trma=130 N.m maxi T=0 N.m
M.L.I :
|
?n ?0,010 s
kvp=15/ kvi=40
nréf=60 tr/min
Conditions initiales :
|
kp=55 ki=10 Seuils de limit.-300/300N.m
?réf=0
Filtrage des tensions :
|
diagonale):
P0/0 :8 (Confiance sur la 1ère estimation) Q0 : 0,6
(bruits sur le système)
R0 : 530 (bruits sur les mesures)
Bruits blancs de mesure :
|
|
?0 estimé (filtre)=0 °
O0 réel=0 °
|
|
fp=2,4kHz(fixe)/Up=410 volts
|
Ib max : 0,38A pour In=9,3A
Vbmax: 1,5 volts pour Vn=220 volts Bruits blancs sur le
système :
|
|
fc : 1,5kHz / Ordre : 2
|
|
voir fichier Metafile en annexe 4.
|
Nota:
Les coefficients des matrices de variance-covariances ont
été repris pour cette simulation.
Mémoire CNAM Patrick BOIDIN.
n et n estimé (- -) en tr/min. théta0 réel=
0°
60
50
40
30
20
10
0
-10
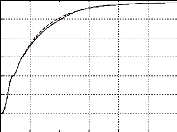
n estimé n
0 0.01 0.02 0.03 0.04 0.05 0.06
P0=8/Q0=0,6/R0=530 Temps (s)
a)
theta et theta estimé (- -) en degré. théta0
réel= 0°
0
0 estimé
0 0.01 0.02 0.03 0.04 0.05 0.06
P0=8/Q0=0,6/R0=530 Temps (s)
b)
400
350 300
250 200
150 100
50
0
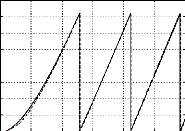
Fig.IV-5.12 Cde en vitesse du moteur avec retour de
0et n par le filtre de
Kalman.
5.4.b) Remarques sur les simulations
effectuées.
Les dizaines de simulations que nous avons effectuées
donnent de bons résultats mais dans des limites bien précises. En
effet, tant que la position du rotor à l'instant initial du
démarrage est restée inférieure à +ou- 90°, le
moteur a démarré dans de bonnes conditions. La commande du moteur
avec son filtre a rattrapé en moins de 60ms les erreurs d'estimation.
Au-delà de + ou - 90°, l'erreur initiale sur la
position du rotor a été plus difficile à rattraper. Dans
certaines situations, le fonctionnement du moteur est resté instable
durant plusieurs secondes.
? Le filtre de Kalman, tel que nous l'avons défini,
fonctionne bien, tant que l'erreur initiale sur la position est restée
acceptable. Ce dispositif a besoin d'être amélioré.
A partir du moment où le filtre de Kalman a permis
d'approcher, au plus vite, la trajectoire de référence
(trajectoire estimée), le système réel a été
capable de se coller sur cette trajectoire et d'y rester. Il suffit d'observer
les résultats sur la simulation où on a inversé le sens de
rotation du moteur, pour s'en persuader.
La dernière simulation montre bien que connaissant la
position initiale du rotor (o0estimé =00 réej, le
filtre de Kalman a joué parfaitement son rôle à une faible
erreur près.
Pour améliorer le dispositif, il faut :
· 1ère idée : Imposer une position
initiale au rotor, avant de démarrer le moteur.
· 2ème idée : Détecter la
position initiale du rotor par un moyen quelconque mais sans capteur
mécanique.
La deuxième idée est a priori difficile à
réaliser car le rotor du moteur est conçu avec une structure
à pôles lisses.
Par contre, la première idée est plus
réaliste et permet d'utiliser efficacement le filtre de Kalman. Par ce
moyen, on peut utiliser, non plus une commande dans le repère
(as,bs,cj, mais une commande vectorielle dans le
repère de Park (d,q).
Mémoire CNAM Patrick
BOIDIN.
Le tour électrique qui équivaut à
5,625 degré mécanique est suffisamment faible
pour autoriser cette idée. Les moyens à mettre en oeuvre sont
simples à réaliser : Il suffit d'imposer un état à
chaque interrupteur de l'onduleur de telle sorte qu'un courant continu puisse
entrer dans le premier enroulement des phases du moteur et puisse sortir par
les 2 autres enroulements shuntés en sortie. En imposant ces conditions
et un courant continu suffisant, le rotor va se positionner naturellement
suivant l'axe du premier enroulement statorique des phases du moteur.
I
as

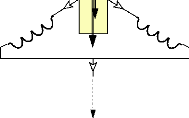
?
Baim
?
BI
I
Axe de la phase as
Fig.IV-5.13: Mise en position initiale du rotor par
injection d'un courant continu. 5.5. Définition des moyens
matériels pour les essais expérimentaux :
A défaut de pouvoir continuer cette étude, nous
présentons le matériel principal et les logiciels qui auraient
permis d'effectuer les essais expérimentaux :
1. Une carte multiprocesseur du type dSPACE DS1102
à multiplication par virgule flottante. Sous sa forme standard,
cette carte est munie :
· Un processeur principal de signal Texas Instrument
TMS320C31 (maître) ayant une fréquence d'horloge de 40 Mhz (temps
de cycle : 50 ns).
· Un processeur secondaire de signal Texas Instrument
TMS32P14 (esclave) pour la gestion de 12 entrées et/ou sorties
numériques et pour la génération des 6 sorties M.L.I.
· 4 convertisseurs "Analogique/Numérique" (#177;
10 volts/16 bits, 10 ts).
· 4 convertisseurs "Numérique/Analogique" (12
bits, 4 ts/#177; 10 volts).
Mémoire CNAM Patrick
BOIDIN.
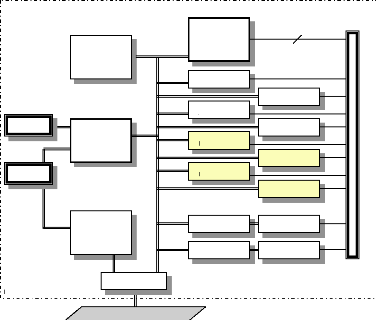
DS1102 DSP- board
Connecteur
JTAG
Interface
série
· zero wait-states
· 4 096 k Octets
de
mémoire RAM
TMS320C31
Interface
JTAG
Bus d'extension PC/AT
Interface
Serveur
Entrées / Sorties
numériques
Entrée codeur incrémental n°1
Entrée codeur incrémental n°2
TMS320P14
Convertisseur
A/N 16 bits n°1
Convertisseur
A/N 16 bits n°3
Convertisseur
N/A 12 bits n°1
Convertisseur
N/A 12 bits n°3
Convertisseur
A/N 16 bits n°2
Convertisseur
A/N 16 bits n°4
Convertisseur
N/A 12 bits n°2
Convertisseur
N/A 12 bits n°4
Filtre
d'entrée
Filtre
d'entrée
26
Connecteur E/.S A/N
Fig.IV-5.14:Carte DS1102 de Texas Instrument.
· Un interface "Codeur incrémental" pouvant recevoir
2 entrées parallèles (24 bits, 8,3 Mhz).
· Une capacité de travail de 128 kOctets sur 32 bits
soit 4 M.O. de mémoire RAM.
· Un interface d'Entrée/Sortie TMS320C31 du type
"série".
· Un interface d'Entrée/Sortie TMS320C31 du type
"JTAG".
La carte DS1102 se connecte directement sur la carte Mère
du micro-ordinateur par sa liaison bus extensible.
2. Deux capteurs de courant de Marque LEM et de type LA 25-NP
(ou autres) :
· Courants nominal/maxi : 25A/36A
· Entrée/Sortie : 0-25A/0-25mA
· Alimentation auxiliaire : + et - 15volts
· Temps de retard : <1ts
· Bande passante (-1dB) : DC à 150kHz (-1dB)
· Précision à +25°C : #177;0,5% de
In
· Montage : sur circuit imprimé
Mémoire CNAM Patrick
BOIDIN.
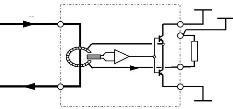
+15 volts
'as
0 - 25A
LEM LA 25-NP
0 volts
R mesure
0 - 25mA
-15 volts
Fig.IV-5.15: Capteur de courant.
3. Deux capteurs de tension de Marque LEM et de type LV 25-P (ou
autres) :
· Tension à mesurer : 400volts (Tension
composée)
· Courants nominal : 10mA => Résistance
R1=40k)
· Entrée/Sortie : 0-14mA/0-25mA
· Alimentation auxiliaire : + et - 15volts
· Temps de retard : 40ts pour R1 série 25k)
· Bande passante (-1dB) : DC à 150kHz (-1dB)
· Précision à +25°C : #177;1,6% de
Un
4.
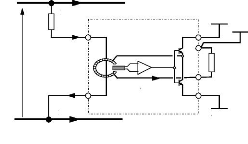
Uab
R mesure
-15 volts
'bs
'as +15 volts
R1
LEM LV 25-P
0 volts
0 - 14mA
0 - 25mA
Fig.IV-5.16: Capteur de tension.
Deux convertisseurs de signaux analogiques 0-25mA (sortie LEM
tensions et courants) / -10V-+10V (entrée DS1102).
5. De 3 modules de puissance 30A dont l'ensemble constituera les
6 interrupteurs de l'onduleur (IGBT) et son interface de.
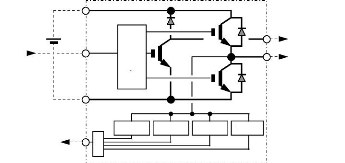
Cde
du bras
Sortie défaut
>1
Court-circuit
Cde
à
Fonctions
intégrées
Surintensité
Température
haute
UV-Lock
Frein
Phase du moteur
Fig.IV-5.17: Module de puissance d'un bras onduleur.
Mémoire CNAM Patrick BOIDIN.
Un capteur de position du type codeur absolu 12bits
CHM61054C3R/4096 de marque IDEACOD Hohner AUTOMATION. Ce capteur est
indispensable à la validation des paramètres de réglage du
filtre. En effet, il faut s'assurer que le système à variables
estimées évolue de la même façon que le moteur avant
de réguler
sur les paramètres estimées ?? et
0? .
6. Les options logiciels complémentaires à
MATLAB-SIMULINK (Scientific Software - Sèvres) pour carte DS1102:
· RTW (Real-Time Workshop).
· RTI31 (Real-Time Interface).
· TRACE31W TRACE, MS-Windows (non indispensable à
l'application mais bien utile).
· COCKPIT31W COCKPIT, MS-Windows (non indispensable
à l'application mais bien utile).

variables Paramètres
Unité de pilotage
COCKPIT
Fig.IV-5.18

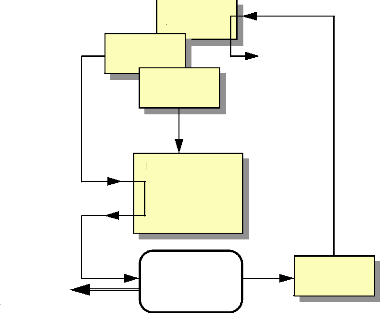
PROCESSUS
ET
SES INTERFACES
Paramètres
SIMULINK
· Cde et régulation
Interface temps réel
(Real-Time Interface)
compilateur C
(C compiler)
Téléchargeur
(Loader)
Real-Time
Workshop
MATLAB
· Filtre de Kalman
DS1102
JL C
Codage
du modèle
en "C"
Affichage des
courbes
graphiques
Enregistrement
des données
TRACE
Pour exécuter l'application avec la carte tC, il faut
convertir les algorithmes de contrôle-commande écrits sous
Matlab-Simulink, en langage C. De plus, il faut compiler les lignes de
programme, établir les liens d'adressage avec le carte et
télécharger les données.
Mémoire CNAM Patrick BOIDIN.
Ce sont les 2 premières options logiciels qui
réalisent ces tâches. Il faut noter qu'il n'est pas
nécessaire d'écrire les algorithmes de commande directement en
langage C, le programme s'en charge avec tous les avantages que cela supposent
en gain de temps et en fiabilité.
L'option COCKPIT permet de commander et contrôler le
processus directement depuis le clavier du micro-ordinateur.
L'option TRACE permet de transférer les données
(mesures) à mémoriser dans MATLAB de façon à
analyser le comportement du processus en temps différé (Sorties
graphiques sur écran).
Nous pensons que les moyens logiciels tels que nous les
avons présentés ci dessus, correspondent à l'outil
idéal à l'élaboration d'une commande de moteur de tous
types. Il faut néanmoins préciser que ce matériel n'est
pas adapté, par son coût (environ 50 000 francs), au produit final
capable de commander le moteur "Fintronic". Il faudra donc après
certitude sur la faisabilité de la commande étudiée,
déterminer l'outil le mieux adapté aux tâches à
exécuter.
La figure qui suit, présente le matériel
nécessaire aux travaux expérimentaux d'une commande sans capteur
mécanique du moteur.
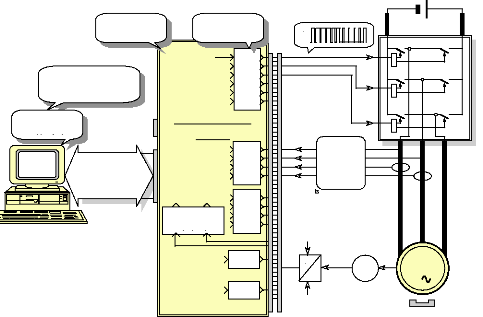
Matlab-Simulink
Version 4.2c.1
MathWorks
Algorithme de Crt/Cde
du moteur
Estimateur de position du
rotor
486DX66
RTI31
Interface
Simulink/DS1102
+
Real Time
Workshop
Microcontrôleurs
TMS320C31
TMS320P14
Connecteurs
liaison série
+ JTAG
12 Entrées
TTL (0-5V)
Traitement de la position
Bus PC/AT
Encoder
Phase Lines Unit
DS1102ENC
Rapport cyclique
0-100%/-1-+1
Carte dSPACE
DS1102
4 I/O TTL en réserves
Fréquences ajustables
Bit-I/O
IN ou OUT
Bit-I/O
IN
DS1102
DS1102
DS1102
PWM
Unit
ADC
Unit
DAC
Unit
PWM
AD
DA
Sub62
Alimentation TTL
0-5volts
+10 -10vol
Alimentation Codeur 0-15volts
+5v
0v
Exemple de signal en MLI
5V
15V
Interface
Signaux
Analogiques
(Convertisseurs)
Codeur Absolu 12 bits
Sortie Push-Pull 11-27V
Capteur de
position
C
t
0-25mA
I1
I2
I3
Aimants P.
vas
ias
MS
3
ibs
vbs
I'1
I'2
I'3
Capteurs de
Tension
Capteurs de
Courant
O
n
d
u
l
e
u
r
MOTEUR DISCOïDE
A AIMANTS ALTERNES
Fig. IV-5.19
Mémoire CNAM Patrick BOIDIN.
6. CONCLUSION
Cette étude a permis de démontrer qu'il n'est
pas aussi évident de remplacer le capteur mécanique par le filtre
de Kalman. Néanmoins, nous restons persuadé que le FILTRE DE
KALMAN est le seul outil, actuel, capable de réaliser cette tâche
à moindre coût.
L'inconvénient majeur de ce dispositif, tel que nous
l'avons étudié, vient des conditions initiales sur la position du
rotor qui conditionnent l'ensemble du système.
= Il faut impérativement trouver un moyen technique
qui permettrait de connaître la position initiale du rotor. Par cette
seule condition, il sera alors possible d'utiliser la commande vectorielle de
PARK.
De plus, cette étude sans capteur aurait besoin
d'être complétée par les études que nous n'avons pas
pu réaliser dans ce mémoire. Elles sont:
· La prise en compte, dans le filtre de Kalman, des
erreurs possibles d'évolution du système dues à la
variation des paramètres supposés constants (résistance,
flux, inductance synchrone, etc.).
· La détermination, par le calcul, de la valeur
optimale des coefficients de variance des Matrices de variance-covariance.
· L'intégration dans le vecteur d'état, du
couple résistant afin de l'estimer. Cas, où on ne connaît
pas les caractéristiques mécaniques de la machine
entraînée.
· L'étude du système à variables
estimées, en limitant l'ordre du système aux seules variables
à estimer (vitesse, position et couple résistant).
Cette solution risque d'être peu concluante. En effet,
les tensions et les courants feraient alors partie du vecteur d'entrée
avec une constante électrique élevée entre ces 2
entrées. Le système à variables d'état
estimées risque d'évoluer avec un certain retard par rapport au
système réel. Néanmoins, l'étude mérite
d'être effectuée car le système se ramènerait
à un système d'ordre 3 au lieu de 4 (avec l'estimation du couple
résistant).
· L'étude complémentaire de la commande qui
tient compte des cas où la vitesse du moteur est supérieure
à la vitesse nominale (commande à puissance constante).
· L'amélioration technique des
générateurs de M.L.I. qui est l'élément primordial
de la commande avec et sans capteur mécanique de ce moteur (constante de
couple élevée). De plus, il faut soigner l'entrée des
courants sur le filtre car ce sont ces courant qui servent de
référence à la correction des prédictions.
· L'étude des moyens permettant de détecter
la position du rotor à l'arrêt bien que le moteur ait un rotor
à pôles lisses.
CONCLUSION GENERALE
En apportant quelques modifications sur la conception du
prototype, telles que :
· L'amélioration de la qualité des
tôles du circuit magnétique pour limiter au mieux les pertes
magnétiques.
· La reprise des formes géométriques des
plots statoriques pour une meilleure pénétration des flux et une
réduction du couple résiduel, parasite.
· L'augmentation de la rigidité mécanique de
l'ensemble afin de maintenir l'entrefer constant et éviter les tendances
au collage,
le moteur de structure discoïde conçu par
GEC-ALSTHOM MOTEURS NANCY, a certainement un bel avenir devant lui dans les
domaines de la robotique et de la traction électrique.
De plus, un onduleur de tension utilisant une M.L.I pour
contrôler les courants, une commande vectorielle dans PARK et une
commande de couple et de vitesse, devrait convenir assez bien à ce type
de moteur. Le FILTRE DE KALMAN, tenant compte des études
complémentaires proposées et cités en conclusion du
dernier chapitre, devrait compenser assez bien la suppression du capteur
mécanique.
D'une façon générale et compte tenu des
exigences industrielles imposées sur le marché actuel, je dirais
qu'il n'est plus possible aux concepteurs de moteurs électriques, de
concevoir leur moteur sans tenir compte de l'électronique de puissance
qui va commander le moteur. De même, il n'est plus possible aux
concepteurs de systèmes électroniques de concevoir une
électronique de puissance et une électronique de commande sans
tenir compte de la constitution du moteur.
Les compétences de chacune de ces techniques devront
inévitablement s'associer pour ne
former qu'une seule et unique
puissance technologique d'avenir.
J'espère que ce travail aura donné satisfaction
à la société GEC-ALSTHOM MOTEURS NANCY qui a bien voulu me
confier ce prototype. Je regrette néanmoins de ne pas avoir eu le temps
de conclure ce travail par une expérimentation de la commande avec son
filtre de Kalman.
Pour ma part, cette étude qui a nécessité
une année complète de travail, a été
particulièrement intéressante car elle a rassemblé un
large éventail de techniques complémentaires à celles de
l'électrotechnicien. D'ailleurs, ces techniques vont devenir très
rapidement indispensables aux connaissances de l'électrotechnicien de
demain.
REFERENCES BIBLIOGRAPHIQUES
[1] ALLANO Sylvain - Etude de machines à
réluctance variable polyentrefers alimentées à moyenne
fréquence. Thèse de Doctorat d'état à PARIS 6,
1987.
[2] LUCIDARME J., DESEQUELLES P.F., GOYET R., RIOUX C.,
POUILLANGE J., CREMET G. - Les machines synchrones polyentrefers : Le moteur
C.E.A. (200-300 N.m). Rapport final. Document confidentiel GEC-ALSTHOM
MOTEUR Nancy, 1987.
[3] CREMET Gérard - Notes de calculs sur le
dimensionnement du moteur. GEC-ALSTHOM MOTEUR Nancy, 1987.
[4] SIBOUILLE Michel - La transformation de Park. Application
au moteur synchrone. Sujet de cycle C, C.N.A.M d'Aix, 1992/1993.
[5] BARRET Philippe - Régimes transitoires des
machines tournantes électriques. Collection de la direction des
études et recherches d'électricité de France. Editions
Eyrolles de 1987.
[6] LUCAS Francois - La transformation de Park. Cours du
cycle C, C.N.A.M d'Aix, 1992/1993.
[7] Longya XU, Jiping YAO - A compensated vector control
scheme of a synchronous reluctance motor including saturation and iron
losses. Publication de IEEE INDUSTRY APPLICATIONS SOCIETY, volume 28,
numéro 6 de novembre/décembre 1992..
[8] JOOS Géza, GOODMAN Edward D. - Entrainements
à courant continu. Presse de l'Université du QUEBEC, 1987.
[9] LAJOIE-MAZENC Michel et VIAROUGE Philippe - Alimentation
des machines synchrones. Les techniques de l'ingénieur D 3630, Juin
1991.
[10] REKIOUA Toufik - Contribution à la
modélisation et à la commande vectorielle des machines synchrones
à aimants permanents. Thèse de docteur I.N.P.L., Lorraine
Juillet 1991.
[11] CARON J.P. et HAUTIER J.P. - Modélisation et
commande de la machine synchrone. SEE 3E.I95, Journées
d'études du 30 et 31 Mars 1995.
[12] BOIDIN Patrick- La M.L.I par la technique
numérique. Application aux variateurs à V/f constante et au
contrôle vectoriel. Probatoire C.N.A.M d'Aix du 17 Mars 1994.
[13] DHAOUADI Rached - Application of stochastic filtering
to a permanent magnet synchronous motor drive system without electromechanical
sensors. Thèse de docteur de l'université du Minnesota,
Octobre 1990.
[14] RADIX Jean-Claude - Introduction au filtrage
numérique ; Lissage de données, estimation de paramètres,
identification de processus - exercices et solutions. Ouvrage des Editions
Eyrolles, 1970.
[15] BRUN-PICARD D. - Equations d'état des
systèmes linéaires continus et discrêts. Cours
d'automatismes B1 de l'enseignement CNAM d'Aix en Provence. Année
1992/1993.
[16] DE FORNEL Bernard, FADEL Maurice, PIETRZAK-DAVID Maria,
Joao Carlos Henriques Dos REIS e COSTA - Méthodes d'estimation et
d'observation des variables non mesurables pour le contrôle des machines
à courant alternatif. Toulouse, journées du club EEA du 14 et
15 Mars 1991.
- ANNEXE 1 -
ESSAIS EXPERIMENTAUX ET VALIDATION DU
MODELE.
ESSAIS DU PROTOTYPE : RELEVES ET OSCILLOGRAMMES.
1. ESSAI A VIDE EN FONCTIONNEMENT GENERATEUR. 1.1.
Tableau des relevés :
|
Valeurs calculées:
Ea s n
0
(V/ tr.min-1)
|
|
|
|
|
|
|
0,70
|
|
0,68
|
|
0,67
|
|
0,67
|
|
0,66
|
|
0,68
|
|
0,69
|
|
0,66
|
|
0,63
|
|
0,63
|
|
Moyenne : 0,67
|
|
N°
|
Moteur cc
I
(A)
|
Moteur cc
U
(V)
|
n
(tr/min)
|
Génératrice
Ea 0s
(V)
|
|
1
|
3,65
|
8,3
|
18,5
|
13,0
|
|
2
|
4,35
|
12,0
|
35,2
|
24,0
|
|
3
|
5,00
|
14,2
|
43
|
29,2
|
|
4
|
5,60
|
17,6
|
60
|
40,0
|
|
5
|
5,70
|
18,6
|
66
|
43,5
|
|
6
|
6,10
|
20,5
|
74
|
50,0
|
|
7
|
6,95
|
25,7
|
100
|
66,8
|
|
8
|
7,93
|
31,6
|
129
|
85,0
|
|
9
|
8,57
|
35,7
|
155
|
98,0
|
|
10
|
9,9
|
44,9
|
200
|
126
|
Tab.An1-1 1.2. Tracé de la courbe : n
1-3 ea 0s
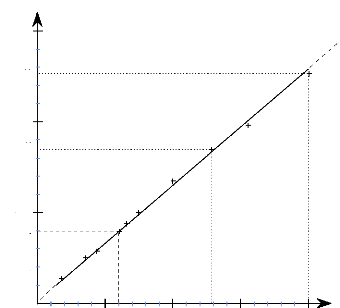
Ea 0s
(V)
150
140
130
120
110
100
90
80
70
60
50
40
30
20
10
n
e a 0 s ( n )
0 10 20 30 40 60 70 80 90 110 120 130 140 160
170 180 190 (tr/min)
50 100 150 200
n n = 60 tr/ min
Fig.An1-1 : F.e.m induite au stator en fonction de la
fréquence de rotation.
2. ESSAI EN COURT-CIRCUIT DES ENROULEMENTS DU STATOR.
2.1. Tableau des relevés :
|
N°
|
Moteur cc
I
(A)
|
Moteur cc
U
(V)
|
n
(tr/min)
|
Génératrice
Icc
(A)
|
|
1
|
3,70
|
13,0
|
34,2
|
1,86
|
|
2
|
3,60
|
14,4
|
41,7
|
1,86
|
|
3
|
3,55
|
16,0
|
53,3
|
1,86
|
|
4
|
3,65
|
18,2
|
64,2
|
1,86
|
|
5
|
3,9
|
21,9
|
83,3
|
1,9
|
|
6
|
4,5
|
31,3
|
133
|
1,9
|
Tab.An1-2 : Relevés du courant de court-circuit au
stator.
3. ESSAI A VIDE EN FONCTIONNEMENT MOTEUR.
3.1. Relevé des oscillogrammes :
· i a 0 ( t ) et v a ( t ) pour U ab = 260 volts et
i a0 = 7 , 2A soit 77%de In et 68% de Un.
Echelles :50 volts/cm, 5A/cm et 5ms/cm
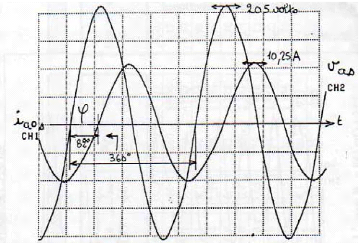
Fig.An1-2
· i a 0 ( t ) et v a ( t ) pour U ab = 135 volts
et i a0 = 3 , 2A soit 34%de In et 36% de Un.
Echelles :50 volts/cm, 2A/cm et 5ms/cm
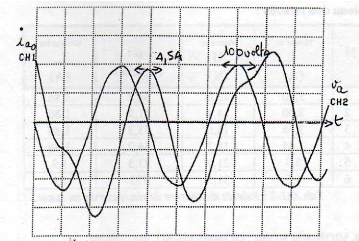
Fig.An1-3
La déformation de l'onde de courant qui apparait sous
tension réduite, est due aux à-coups de couples
(conséquence d'un entrefer qui n'est pas rigoureusement constant). En
augmentant la base de temps, on peut constater que ces à-coups de couple
apparaissent périodiquement toutes les 30ms soit toutes les
périodes et demi par rapport à la pulsation des grandeurs
statoriques.
Echelle :20ms/cm.
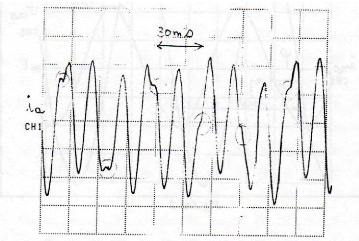
Fig.An1-4
- 125 -
Annexe 1: Essais expérimentaux et validation du
modèle.
3.2. Tableau des relevés : Moteur à vide en
fonctionnement moteur. n=46,8 tr/min (synchrone)= 50 Hz
Mesures
|
N°
|
Uab
(V)
|
Ia0
(A)
|
Ib0
(A)
|
P0
(W)
|
Q0
(var)
|
|
1
|
340
|
10,85
|
10,9
|
1 440
|
6 131
|
|
2
|
320
|
9,9
|
10
|
1 260
|
5 196
|
|
3
|
307
|
9,3
|
9,4
|
960
|
4 677
|
|
4
|
280
|
8,3
|
8,1
|
750
|
3 741
|
|
5
|
260
|
7,4
|
7,25
|
624
|
3 076
|
|
6
|
240
|
6,9
|
6,7
|
525
|
2 728
|
|
7
|
220
|
6,6
|
6,4
|
460
|
2 321
|
|
8
|
200
|
5,8
|
5,65
|
374
|
1 916
|
|
9
|
180
|
5,2
|
5,1
|
294
|
1 535
|
|
10
|
160
|
4,65
|
4,55
|
226
|
1 154
|
|
11
|
145
|
4,2
|
4,1
|
185
|
927
|
|
12
|
120
|
3,2
|
3,1
|
125
|
580
|
Calculs
|
tan (p
|
cos (p
|
Uab2
x103
|
PJ
(W)
|
Pméca
+
Pmag
(W)
|
Pmag
(W)
|
S0
|
Vas
(V)
|
|
2 2
?
( P 0 Q )
0
|
|
4,26
|
0,229
|
116
|
343
|
1 097
|
1 050
|
6 298
|
196,3
|
|
4,12
|
0,24
|
102,4
|
283
|
977
|
930
|
5 347
|
184,8
|
|
4,87
|
0,20
|
94,4
|
249
|
711
|
664
|
4 775
|
177
|
|
4,98
|
0,20
|
78,4
|
199
|
551
|
504
|
3 815
|
162
|
|
4,93
|
0,20
|
67,6
|
158
|
466
|
419
|
3 139
|
150
|
|
5,20
|
0,19
|
57,6
|
137
|
388
|
341
|
2 778
|
139
|
|
5,05
|
0,19
|
48,4
|
126
|
334
|
287
|
2 366
|
127
|
|
5,12
|
0,19
|
40,0
|
97,0
|
277
|
230
|
1 952
|
115
|
|
5,22
|
0,19
|
32,4
|
780
|
216
|
169
|
1 563
|
104
|
|
5,11
|
0,19
|
25,6
|
62,3
|
164
|
117
|
1 176
|
92,4
|
|
5,01
|
0,20
|
21,0
|
50,9
|
134
|
87
|
945
|
83,7
|
|
4,64
|
0,21
|
14,4
|
29,5
|
96
|
49
|
593
|
69,3
|
Tab.An1-3 Nota : P J = 3 R sI
02 avec R s = 961 m ? à 20°C
Pmag+ mé ca ? P 0 - P J
3.3. Tracé de la courbe : U P mag P
mé c
2 F-> +
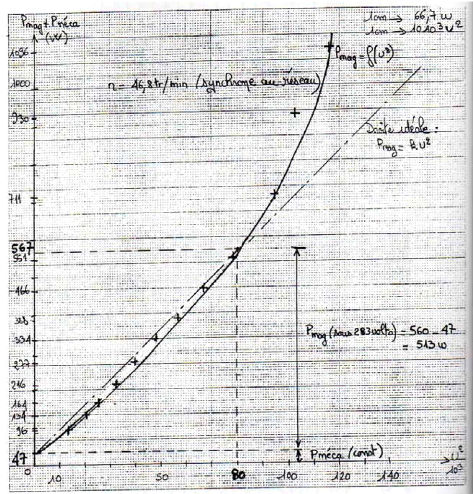
Fig.An1-5
4. ESSAI EN CHARGE EN FONCTIONNEMENT MOTEUR.
4.1. Essais à couples constants (Fonctionnement en
boucle ouverte) :
4.1.a) Tableaux des relevés ; Essai à
Tu = 100,6 N.m (Constant) ? Pu ? 0,48 kW
n=46,8 tr/min (synchrone)= 50 Hz
Mesures
|
N°
|
Uab
(V)
|
Vas
(V)
|
Ia
(A)
|
Ib
(A)
|
Pabs
(W)
|
Qabs
(var)
|
|
1
|
312,4
|
180
|
9,75
|
10
|
1 590
|
5 040
|
|
2
|
304
|
174,6
|
9,40
|
9,50
|
1 506
|
4 645
|
|
3
|
296
|
170
|
9,12
|
9,21
|
1 437
|
4 380
|
|
4
|
288
|
166
|
8,80
|
8,91
|
1 341
|
4 204
|
|
5
|
280
|
162
|
8,50
|
8,51
|
1 290
|
4 001
|
|
6
|
278
|
Décrochage du rotor
|
Calculs
|
(1)
cos q
|
(2)
PJ
3RsIb 2
(W)
|
(3)
Pmag
(W)
|
S
|
Pu
Tu(2in)
(W)
|
11
Pu/Pabs
(%)
|
PmajPabs
(%)
|
|
2 2
+
? P abs Q abs )
(VA)
|
|
0,30
|
339
|
760
|
5 285
|
493
|
31
|
48
|
|
0,31
|
306
|
667
|
4 883
|
493
|
33
|
44
|
|
0,31
|
288
|
640
|
4 610
|
493
|
34
|
45
|
|
0,30
|
269
|
587
|
4 413
|
493
|
37
|
44
|
|
0,31
|
245
|
486
|
4 204
|
493
|
38
|
38
|
|
Tab.An1-4
(1) : Cos q = Cos [Arc tan (Qabs /Pabs)]
(2) : A chaud, Rs = 1,13Q
(3) : D'aprés les essais à vide, on a k
=6,20.10-3 W/V2 pour une tension inférieure
à 283 volts.
4.1.b) Tracé des coubes : I b ?
Uab pour différentes valeurs de Tu
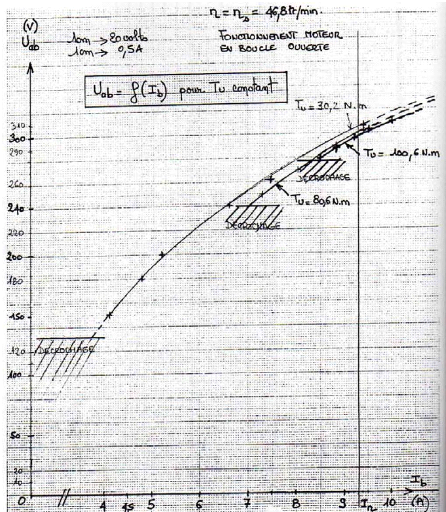
Fig.An1-6
4.2. Essais à tensions constantes (Fonctionnement
en boucle ouverte) :
4.2.a) Tableaux de relevés ; Essai à Uab =
300 volts (Constant) =0 ~Tu ~138 N.m
n=46,8 tr/min (synchrone)= 50 Hz Pmag = 667
W(constante)
Vas = 172 volts
Mesures
|
N°
|
Tu
(N.m)
|
Pu
(kW)
|
Ia
(A)
|
Ib
(A)
|
Pabs
(W)
|
Qabs
(var)
|
|
1
|
0
|
0
|
9,02
|
9,10
|
1
|
005
|
4
|
547
|
|
2
|
20,4
|
0,09
|
9,02
|
9,12
|
1
|
089
|
4
|
536
|
|
3
|
40,1
|
0,19
|
9,10
|
9,20
|
1
|
185
|
4
|
547
|
|
4
|
66,8
|
0,32
|
9,25
|
9,33
|
1
|
308
|
4
|
583
|
|
5
|
82,1
|
0,39
|
9,30
|
9,40
|
1
|
383
|
4
|
619
|
|
6
|
100,6
|
0,48
|
9,35
|
9,46
|
1
|
464
|
4
|
614
|
|
7
|
111
|
0,54
|
9,41
|
9,51
|
1
|
500
|
4
|
666
|
|
8
|
120
|
0,57
|
9,50
|
9,60
|
1
|
554
|
4
|
687
|
|
9
|
130,3
|
0,63
|
9,56
|
9,67
|
1
|
605
|
4
|
703
|
|
10
|
138
|
Décrochage du rotor
|
|
|
Calculs
|
(1)
cos q
|
(2)
PJ
3RsIb2
(W)
|
S
|
Pu
Tu(2in)
(W)
|
TI
Pu/Pabs
(%)
|
Pmag/Pabs
(%)
|
|
2
2 + (
( P abs Q abs )
(VA)
|
|
0,22
|
281
|
4 657
|
0
|
0
|
66,3
|
|
0,23
|
282
|
4 665
|
100
|
9,1
|
61,2
|
|
0,25
|
287
|
4 699
|
197
|
16,6
|
56,3
|
|
0,27
|
295
|
4 766
|
327
|
0,25
|
51,0
|
|
0,29
|
300
|
4 822
|
402
|
29,1
|
48,2
|
|
0,30
|
303
|
4 841
|
493
|
33,7
|
45,6
|
|
0,31
|
307
|
4 901
|
544
|
36,3
|
44,5
|
|
0,31
|
312
|
4938
|
588
|
37,8
|
42,9
|
|
0,32
|
310
|
4 969
|
639
|
39,8
|
41,6
|
|
Tab.An1-5
(1) : Cos q = Cos [Arc tan (Qabs /Pabs)]
(2) : A chaud, Rs = 1,13Q
4.2.b) Tableaux de relevés ; Essai à
Uab = 340 volts (Constant) =0 <_Tu <_138,5 N.m :
n=46,8 tr/min (synchrone)= 50 Hz Pmag = 717 W
(constante)
Vas = 196 volts
Mesures
|
N°
|
Tu
|
Pu
|
Ia
|
Ib
|
Pabs
|
Qabs
|
|
(N.m)
|
(kW)
|
(A)
|
(A)
|
(W)
|
(var)
|
|
1
|
104,6
|
0,50
|
11,25
|
11,3
|
1 890
|
6 287
|
|
2
|
138,5
|
0,64
|
11,3
|
11,32
|
1 995
|
6 365
|
|
3
|
|
Limite du banc d'essais
3
|
Calculs
|
(1)
cos cp
|
(2)
PJ
3RsIb2
(W)
|
S
|
Pu
Tu(27Cn)
(W)
|
n
Pu/Pabs
(%)
|
Pmag/Pabs
(%)
|
|
( P abs + Q2 abs) (
(VA)
|
|
0,29
|
433
|
6 565
|
513
|
27,1
|
37,9
|
|
0,29
|
434
|
6670
|
678
|
34,0
|
36,0
|
|
Tab.An1-6
(1) : Cos cp = Cos [Arc tan (Qabs /Pabs)]
(2) : A chaud, Rs = 1,13n
4.3. Relevé des oscillogrammes vas( t ) et i as (
t ) : moteur chargé : 4.3.a) T u = 40 ,1 N. m, U ab = 300 volts à
nn =46,8 tr/min (50 Hz) Echelles : 50 volts/cm, 5
A/cm et 2ms/cm
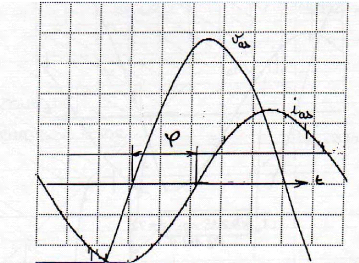
I as = 8 , 8 A p = - 77 ,1°
Fig.An1-7
Echelles : 50 volts/cm, 5 A/cm et
5ms/cm
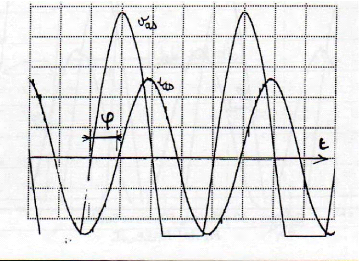
Annexe 1: Essais expérimentaux et validation
du modèle. 4.3.b) T u = 100 N. m, U ab = 300 volts à
nn =46,8 tr/min (50 Hz)
Echelles : 50 volts/cm, 5 A/cm et 2ms/cm
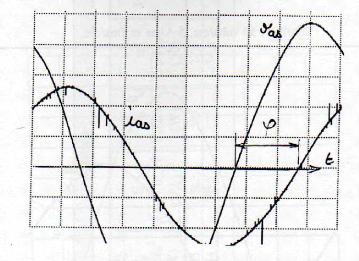
I as ? 9 , 2 A ? p =
72°
Fig.An1-9
Echelles : 50 volts/cm, 5 A/cm et 5ms/cm
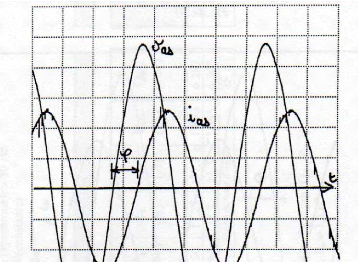
Fig.An1-10
Comparé au précédent relevé, on
remarque un déphasage, du courant statorique, amélioré de
5° environ. Le courant est resté toutefois très inductif.
Annexe 1: Essais expérimentaux et validation
du modèle. 4.3.c) Tracé des coubes : I b >
Tu pour différentes valeurs de U ab
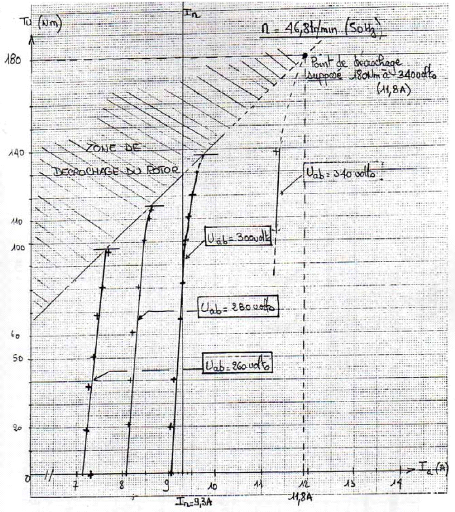
Fig.An1-11
5. DETERMINATION DE LA CONSTANTE THERMIQUE.
Sonde platine n°1
Stator n°1
Sonde platine n°2
Stator n°2



|
t
(min)
0
|
r'
(()
1,704
|
r
(n)
110,2
|
r-r' -3 0°
(°C)
|
r'
(n)
|
r
(n)
|
r-r' -3 0° t° Ambiant
(°C) à 1cm du moteur
(°C)
|
|
22
|
1,384
|
109,9
|
22
|
22,2
|
|
5
|
1,570
|
117,2
|
40
|
1,432
|
119,8
|
47,5
|
/
|
|
10
|
1,587
|
123,9
|
58
|
1,464
|
125
|
61
|
23,4
|
|
15
|
1,591
|
127,1
|
66
|
1,490
|
128,3
|
79
|
24,9
|
|
20
|
1,598
|
129,5
|
72
|
1,513
|
131,0
|
76
|
25,8
|
|
25
|
1,606
|
131,9
|
78,5
|
1,530
|
133,7
|
83,5
|
26,7
|
|
30
|
1,610
|
134,6
|
85
|
1,550
|
136,4
|
90,5
|
27,4
|
|
35
|
1,622
|
138,1
|
95
|
1,576
|
140,2
|
100
|
/
|
|
43
|
1,628
|
141,6
|
104
|
1,608
|
144,2
|
111
|
/
|
|
45
|
1,629
|
142,5
|
106
|
1,614
|
145,1
|
113
|
29,9
|
5.1. Tableau des relevés
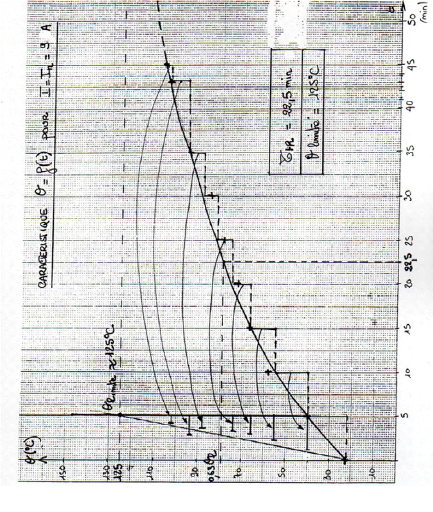
Fig.An1-12
5.2. Tracé de la courbe : t + 0 pour I I
n
- ANNEXE 2 -
COMMANDE SANS CAPTEUR MECANIQUE DU
MOTEUR FINTRONIC.
FILTRE DE KALMAN
QUELQUES NOTIONS SUR LES VARIABLES ALEATOIRES
Il nous semble important d'apporter quelques précisions
sur les signaux aléatoires pour comprendre le fonctionnement du filtre
de Kalman.
· L'espérance (moyenne arithmétique):
Nous allons définir l'espérance d'une variable
aléatoire à travers un exemple simple. Considérons n
relevés de mesure sur une variable aléatoire réelle
notée X, (x 1 , x 2 , x
3, . . ., xn) et effectuons la moyenne de ces
valeurs. On obtiendrait pour n
mesures finies :
une valeur moyenne : x
? ? lim
n n ?? n
x x
? ? ?
. . . x
1 2 n 1 ?

i =n
xi
i
=
1
Or, si on faisait plusieurs séries de mesures, avec
n relevés tendant vers l'infini, on verrait que
la valeur moyenne obtenue pour chaque série de mesures aurait tendance
à converger vers une valeur unique et non pas plusieurs valeurs
dépendants du nombre de relevés . Et c'est justement cette valeur
unique qui caractérise l'espérance de la variable
aléatoire X. L'espérance de X sera
notée :
1
E{ X} ou X avec E{ x(
t)} = lim ? x ? t ?
t =n
=

= Cste
(An2-1)
Nota : A noter que l'espérance des
bruits blancs, est nulle.
· La variance :
La variance correspond à l'espérance
mathématique du carré des écarts par rapport à la
valeur moyenne (espérance).
La variance de X sera notée :
?x ? E ? ? X ? X ? 2 ?
Avec
? ? ? ? ? ? ?
2 1 i n
? 2
?
x ? E X ? X
? lim ? x i ? X
?
n ?? n i
=1
|
2
|
(Carré de l'écart type).
|
|
(An2-2)
Plus clairement et en reprenant l'exemple
précédant, cette variance permet d'apprécier la dispersion
des valeurs mesurées par rapport à son espérance. C'est ce
qu'on appelle la variance de la variable aléatoire
X.
Nota:
L'écart type d'une variable aléatoire correspond
à la racine carrée de sa variance.
· Le coefficient de covariance :
le coefficient de covariance caractérise
l'interdépendance éventuelle entre 2 variables aléatoires
X et Y. Ce coefficient est défini et
noté par:
1 ?xy ? ? ? ? ? ?
? E X ? X Y ? Y ? lim ? ? ? ?
x i ? X y i ? Y
n ?? n ? i= 1
i n
?
(An2-3)
Cette valeur correspond à l'espérance de la
multiplication de l'écart type des 2 variables aléatoires.
Nota :
On pourra considérer par la suite que la notion
d'espérance, de variance et de covariance suffisent pour définir
une variable aléatoire.
· La matrice de variance-covariance :
Si un système différentiel quelconque est
tributaire de plusieurs variables aléatoires, il est possible de
représenter ces variables aléatoires, sous la forme d'un
vecteur.
Dès lors, il est possible de représenter la
variance et la covariance des différentes composantes de ce vecteur sous
la forme d'une matrice dite de « variance-covariance ».
Soit X
|
?
|
F
I
L
|
X
X
X
|
1
2
3
|
1 ?
I
J
|
: vecteur de 3 variables aléatoires,
|
|
(An2-4)
F I
[
C
xx
On a la matrice de variance-covariance suivante:
x 1 x
x 2 x
i
3 ?
3 ? ? ?
Dx 1 cx 1 x2 c
cx 2 x1 0x 2 g
cx 3 x1 cx 3 x2 0 x
3
(An2-5)
Si on remplace chaque terme par leur expression, on a :
??
Cxx = E
L
?
? ? ? ? ? ? ? ? ? ? ?
X X X X X X X X
? ? ? ? X X
?
? 2 2 1 1 3 3 2 2 3 3
-11
? ?
? ?
? ??
? ?

? ? ? ? ? ? ? ? ?
2
? X X
? X X X X
? ? X X X
?
1 1 1 1 2 2 1 1 3
? ? ? ? ?
? X 3 ?
? ? ? ? ? ? ? ? ? ?
2
X X X X X X X X X X
?
2 2 1 1 2 2 2 2 3 3
2
(An2-6))
De plus si on remplace ? ? Xi
X i ? X i par pour simplifier les
notations, on obtient
02
r
0
11 I 1 ? ?? ?
? ? ? ?
3
X1
0
o o
??? ?
?
?
E
?
1 ?
L
C xx = E
3
X2
r 1 1
? ? ? ?
0
2
r
? i ? ?
X3
r 1
?
1
[
L
? ? ? ? ?
X X X
?? 1 2 3
?? ?
? i
o o o o
X 1 X 1 X 2 X 1
X
0 2 0 0
X 2 X 1 X 2 X 2 X
0 0 0 0 0
X 3 X 1 X 3 X 2
X3
(An2-7)
Soit :
Matrice de variance-covariance du vecteur aléatoire :
gxx
|
f 0 0 T
= E iX X ???
|
|
(An2-8)
.
Nota : Dans le cas particulier des
bruits blancs, X = X.
- ANNEXE 3 -
COMMANDE SANS CAPTEUR MECANIQUE DU
MOTEUR FINTRONIC.
FILTRE DE KALMAN
CHANGEMENTS DE REPERE : (as,
bs,cs) ~~ (cts, 3sos) et (d, q, o)
~~ (cts, 3s, os)
TRANSFORMATIONS DE CLARKE ET DE CONCORDIA.
1. DETERMINATION DE LA MATRICE DE PASSAGE DU REPERE
(as, bs,cs) AU REPERE (as,
Os, os).
Afin d'eviter des calculs longs et fastidieux, il est essentiel
de tenir compte de la remarque suivante:
· Le referentiel (as, r3s,
os) correspond au referentiel de Park (d, q, o) pour lequel, on a
immobilise le système d'axes (d, q, o) et oriente l'axe as
suivant la même orientation que l'axe as.
On peut donc considerer que le referentiel (as,
(3s, os) est un cas particulier du referentiel de Park
avec lequel, on a remplace les lettres du système d'axes d, q par
as et ps. Il suffit donc de reprendre la matrice de Park
et de remplacer 0 par 0. On obtient ainsi, la nouvelle matrice de passage.
Dans la litterature courante, cette transformation est appelee
« transformation de
CLARKE ». La matrice de cette
transformee sera notee [ Cla] .


1
?
?
i
cose cos(0 -- 2 7c 3 ) cos(0 -- 4 7c 3)

--sine --sin(0 -- 2 7c 3 ) --sin(e -- 4 7c 3



1 2 1 2 1 2
(An3-1) : Matrice de PARK : Repère (d, q, o).
En remplaçant 0 par 0, on obtient :

1 -- 1 2 --1 2
2
0 3 2 -- 3
1 2 1 2 1 2
1 ?
?
? ?
r I
[
2
3
[ C la ] .
(An3-2): Matrice de CLARKE : Repère (as,
fis, os). Les expressions de tensions, courants et
flux deviennent :

i as = 1 3(
i ? s = 1 3
( i bs -- ics)
2i as -- i bs -- ics)
13
?
s
? ? ? ?? ?
i ? C i
?? o s la abc
? ? ? ?? ?
v ? C v
?? o s la abc
vas =1 3(
2v as --v bs --vcs)

v' s = 1 3
( v bs -- v cs )

13
?
s
? ? ? 1 3 ?
? s
? ? ? 1 3
? s
( Tbs --"cs)
[If alio s [ la abc
] = C IT ]


2Tas --Tbs
--Tcs)
?
s
(An3-3)
Nota :
On ne fait pas apparaître volontairement les expressions,
sur l'axe o. Cet axe intervient uniquement pour l'inversion de la matrice de
transformation (matrice carree).
L'unicité de la matrice de
transformation [ Cla] , pour les tensions, les
courants et les flux, nous oblige à tenir compte des
changements de variables, identiques à la transformation de Park.
3 Ilja s
i i
? ? v ? ? v ? ? ?
? s ? s ? s ? s ? s
3
2 2
s
i ' = i v' = v Ill' = Ill'
li
s
P
s
P
s 3
P
s
li

13
s
3
(An3-4)
2. DETERMINATION DE LA MATRICE DE PASSAGE DU REPERE (as,
Ps) AU REPERE (as, bs, cs).
Avec les mêmes arguments que précédemment,
on remplace 0 par 0, dans la matrice de Park inverse.
r
[
[P]-1. =
i
?
?
? ?

4
i
3 ) -- sin(9 --
4
7c
3
)
1
1
0
2 7c 3) -- sin(9 -- 2 7c 3 ) 1
(An3-5)
On remplace 0 par 0 et on obtient :
[
[Clar1 = --
--1 2 --
ii
L
1
1 0
1 2 3 2 1
3 2 1

(An3-6): Matrice de CLARKE inverse. Les expressions de
tensions, courants et flux deviennent :
i as --i as
--ias
i bs = Pbs = 1 2(
i cs = Pcs = 1
2(
i as + 3 ifts)
i as -- 3 ifts)
[i abo ]s =[C la
]-licoo]
s
v as =vas
US
v as = 3 2v
Us
? ? ? v 3 v ? ?
? s ? s
v as -- 3 vas)
? ? v 3 v ?
? s ? s
? v 3 v ?
? s ? s
?
v bs = 3 4(
v cs = 3 4(
[v abo ]s = [C la ]
1[vafid
v bs = 1 2(
v cs = 1 2(
s
s
?
illas = 3
2ijas
IPbs = 3 4(
IPcs = 3 4(


cos e -- sin
cos(9 --
cos(9 --
ljas + 31Pris)
? ?? 3 ? ?
? s ? s
? ?
? ?
as ? s
[Tabo ]s =[C la
]-1[Tcoo]
? ? ? ?
? 1 2 ? ? ? 3 ?
bs ? s ? ? s

? ? 1 2 ? ? ? ?
? 3 ? ? ?
cs ? s ? s
(An3-7)
3. REPRESENTATION VECTORIELLE DES SYSTEMES
D'AXES
Rs
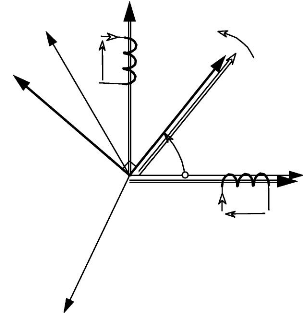
bs
i ?s
CO
Axe
du
rotor
d
q
vas
-->
IP aim
0 + 00
O
i as
vas
as
(Fixes)
as
cs
Fig.An3-1
s cos9
i i I
? ? ?
? s ? s
?
2
?
? ? arctan ?? ?
i ? s ?
? ?? ?
i ? ? s
V = 3v
OLs
? ? ? ?
i i
? ? ? ?
2 2 i i
2 2
s s s ?
? ? ? ? s
?
?
i i I
? ? ? ?
? ?
s s s
since
?
I s =
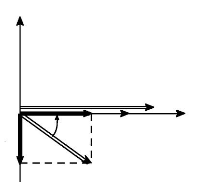
i?as
as
i?Ys
?
->
Vs
->
I s
vas
Rs
as
?
Cas particulier où v s = Vs
coscost
Fig.An3-2
La représentation vectorielle de la figure 3.2 correspond
à un cas particulier oil la tension est colinéaire à l'axe
as à l'instant initial. Dans le cas général, on aurait
:
· v s = ? V
scos(wst + O s0)
s 0
= arcta --
?
· Non pas (p mais (p-Os0
avec cp -- ips
|
· Non pas
|
2 " 2 2 2
Vs = 3 v. 3 mais
Vs = (v + vPs) et Os 0 =
arcta
as
v
|
s,
|
?
s ??
s
|
Os0 : Position du vecteur "tension", par rapport
à l'axe as ou par rapport à l'axe as,
l'instant t=0.
En gardant 0 , comme l'angle
représenté par la position du rotor par rapport à l'axe
fixe as et par conséquent par rapport à l'axe
as, on peut représenter les projections du flux produit par
les aimants sur les axes as et r3s :
3,'
= 2 Taim
tetaim = 4aim
pour Ta'aim = D'après la nouvelle
notation, on a :
Vaaim =
Fig.An3-3
Rs
?
Taim
?
as
aaim
?
? ? arctan ??
waaim = Taim cos°
xvpaim = ''aim
sin°
? ?2 2
? ?
aim ? ?
? ?
aim
W?
Raim
??
? ? aim
d
--)
Waim
11aim
0
as
Remarque importante:
Transposé sur l'axe as, le flux
créé par les aimants (déterminé par un essai) doit
être normalement majoré du coefficient 3/2
(unicité de la matrice de Clarke). On aurait donc :
Etant donné que nous utilisions des valeurs non
primées, on fera de même
·
·
" coW]
[ Cla ][111abc .1 aim =111a4
sinOli
(An3-8)
Il faudra faire ATTENTION que dans tout ce qui suit,
nous utiliserons
des notations non primées pour simplifier les
écritures (Sauf indication
contraire).

Pour retrouver les vraies valeurs de flux et de tensions sur les
axes a et 13, il faudra multiplier chaque résultat par 3
2 (les résultats sur les courants restent identiques).
4. EQUATIONS ELECTRIQUES DANS LE REPERE (as, 13s,
os).
L'expression matricielle des tensions dans le repère
(as, bs, cs) correspond à :
? v ? R ? i ? d ? ?
? ? ?
abc s s abc s abc s
dt
(An3-9)
On multiplie chaque terme par la matrice de CLARKE et on remplace
? par
?abc ? s
|
[ Cla] ? o ? aim
?1 ???
|
. On obtient :
|
? v ? R ? i ? d ? ?
? ? ?
abc s s abc s abc s
dt
[ v ? R ? i ? ? C ? d ? ? ? ?
?1
? ? C la ? ?? ?
?? o s s ?? s la dt o s
|
? v ? R ? i ? d ? ?
?? ? ?? ? ? ??
o s s s dt o s
|
(An3-10)
Il faut exprimer les flux en fonction des courants. Pour cela,
nous utilisons la même démarche que précédemment, en
partant de l'expression des flux dans le repère (as,
bs, cs). [''abc] s ? s ?? abc ? s ? ? abc ?
aim
? L i ?
On multiplie chaque terme par la matrice de CLARKE et on remplace
l'expression des flux par celle de l'expression 3.1:
?1
? C la ? ? abc ? s ? C la ? ? L s ? ? i abc ? s ? C la ?
? abc ? aim
? ? ? ? . Sachant que ? i abc ? s ? C la
? ? i o ? s
? ??
On a : ['Ijapo ] s = [ C
la] [ L s ] [ C la ] 1 [i apo ] s #177;[Illapo ]aim
· Détermination de [ C la ] [
Ls] :

1 2(

1 ? ?
? ?
2
=
3
p
M M L
? 1 ? 1 2 ? 1 2 ?
? ?
0 3 2 ? 3 2
? ?
? ? 1 2 1 2 1 2 ? ?
3
2
[C la ][Ls]
=
L p M M
M L p M
1 2
=
3
0 3 2
1 2(
L
p -- M --1 2 (L p -- M) --1 2(L p -- M)
(L p -- M) -- 3 2(L p -- M)
L p + 2 M) 1 2 (L p + 2 M ) 1 2 (L
p + 2M)
1 ?
? ?
? ?
? ?
, ?
(An3-11)
· Détermination de [ C la ][ Ls]
[ Cla] -1:
[C la ][L s ][Cla]
(An3-12)
L p -- M --1 2 (L p -- M) --1 2(L p --
M)
1 ? ? ? J
0 3 2 (L p -- M) -- 3 2(L p -- M)
L p + 2 M) 1 2 (L p + 2 M ) 1 2
(L p + 2M)

1 --12 --121
?
0 3 2 -- 3 2 ?

1 2 1 2 1 2 ? ?
? 1
? ?? ? ? ?
C L C ? ? 0 ? ?
L M
?
la s la p
?
0 0
?

0
(L p + 2M)
L p -- M 0 0
? ?
f ?
s
? L 0 0 ?
0 L 0 ? s ?
? ? 0 0 L ?

1
?
?
?
J
=
Matrice que l'on notera ? L o ? s
??

?
r 1
[
1 ?
?
? ?
e
e
cos
sin
0
Taim
Ls
0 0
Lf
0 0
[ ja1 o ] s ? ?? o ? s ? ?? o ? s ? ? ?? o ? aim ? L i
?
Avec
0 L s 0
r 1
[
1 ?
?
? ?
Llio]
[a=
et [T' ] = alio
aim
(An3-13)
On dérive l'expression précédente pour
obtenir :
d? ? ? ? ? ?
d
? ? L i o
?? ??
dt o s o s dt ??
?
+ maim
s
r
[
cos
0
? ?
? ?
aim
?
?
sin
(An3-14)
On rappelle que 0 = wt dO = co dt
On remplace l'expression de la dérivée du flux dans
l'expression (4.1) pour obtenir l'expression finale des tensions :
?
? v ? R ? i ? ? L ? d ? ?
? ? i o s ?
?
?? o s s ?? ??
s o s dt ?? aim
Soit
v as = R s i ss +
Ls
AN
cotPaim sine
di a s
dt
v 0 s = R s i Ds +
Ls
v os = R s i os +
Lf
AN
+ cotPaim cose
di 0 s
dt
di os
dt
(Attention aux valeurs primées)
r 1
[
sin
cos
0
0
0
1 ?
?
? ?
aim
(An3-15)
Sous une autre forme, on obtient un système de 2
équations différentielles linéaires à coefficients
constants aux 1ers membres et avec les seconds, variables en fonction du
temps:
?
(4.5) :
di
0
? aim
? sin ?
L L
s
?
Taim
0) cos0
L s L
di
R
dt
L s
R
dt
L s
? s
v
Qs s Qs
#177; i = #177; #177;
Qs
s
v
s s ? s
? i ? ?
s
(An3-16) (Attention aux valeurs primées)
5. DETERMINATION DE LA MATRICE DE PASSAGE DU REPERE (d,
q, o) AU REPERE (as, (s,os).
En reprenant la figure 3.1, on remarque que l'on peut passer
d'un système d'axes (d, q) au système d'axes (cs,
Js) très facilement. La matrice de cette transformée
que l'on appelle « matrice de CONCORDIA »
et notée [ C 0] , correspond à :
|
[ C o ] .
|
r
[
|
cose -- sin ? 0 ?
?
sin cos
? ? 0 ?
0 0 1 ? _I
|
(An3-17) : Matrice de CONCORDIA :
Repère (as, fis, os).
En inversant cette matrice, on obtient :
[C o]-1. --
r 1
cose sine
sin e cose
0 0
0ll
0 ?
?_I
1
(An3-18):Matrice inverse de CONCORDIA :
Repère (as, ?s, os).
On remarque que cette matrice inverse correspond à la
transposé de la matrice de
Concordia : ? ?
C o ? C
? ? t
1 ? . Il y a donc conservation de la puissance
instantanée et de
ol'amplitude des grandeurs
vectorielles.
On obtient ainsi :
i ds = ids cose -- i qs
i 13s = ids sin e + iqs
Nota :Expressions valables aussi pour les
tensions et les flux
sine cose
?
i ds = ias cos ° +
ips
i qs = -- i ns sin e + iPs
sine
cose
(An3-19)
6. EXPRESSION DU COUPLE ELECTROMAGNETIQUE DANS LE REPERE
(as, (s,os).
En reprenant l'expression du couple
électromagnétique dans Park, nous avions :
1aim
3
Tem = KT iqs avec
K T = 2 Np
Or, en remplaçant iqs par son
expression en (An3-19), on obtient une nouvelle expression du couple
électromagnétique :
Tem = K T ( i p s cos e --
ies sine)
avec
3
KT= 2 Np
...taim
(An3-20)
7. EQUATION MECANIQUE DANS LE REPERE (as, (3s,
os).
T em ( Trm a #177; T r f #177; T r 0
)
?
? N J J
( m ? r )
??
p
dco 1
dt I]
1
Avec
T r f = f co
T r0 = Cste

T rma = k co2 ou k co3 ou k co ou
Cste
(An3-21)
En remplaçant Tem par son
expression, on obtient :
?
K ? i i ? f ? T T ? N J J d
1
? ? ? ? ? ? ?
? ? ? ? ? ( ? )
T s cos s sin rma r 0 ?? m r dt ??
p
soit
Attention : f est en rad/s-1
électrique
[K T (i ps cos 9 -- i
es sin e) -- f o)-- T rma -- Tr0]
J m + J

dco
?
dt
N p
(An3-22)
- ANNEXE 4 -
COMMANDE SANS CAPTEUR MECANIQUE DU
MOTEUR FINTRONIC.
FILTRE DE KALMAN
Schéma général sous Simulink : commande du
moteur avec filtre de Kalman (fichier "bfesmli.m").
Schéma-blocs sous Simulink et masque de S-Function du
filtre.
Fichier metafile : bfesmlim.m.
Fichier metafile :
Filtre1m.m.
Annexe 4 : Commande sans capteur mécanique -
Filtre de Kalman - Mémoire CNAM Patrick BOIDIN. Fichier :
bfesmli1.m
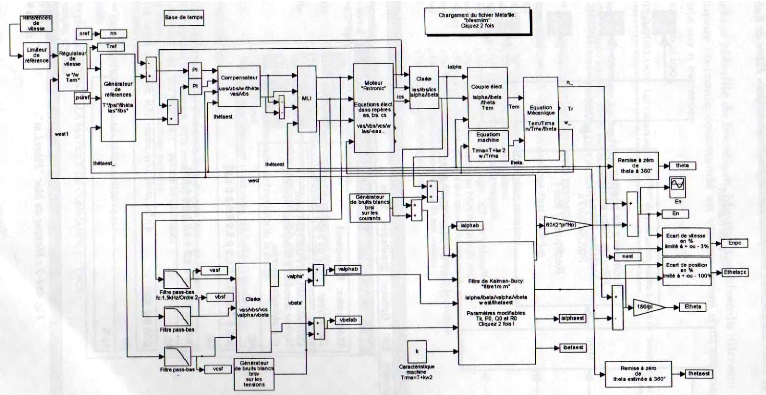
Fig.An4-1 : Schéma général de la
commande sous Matlab-Simulink.
Filtre de Kalman
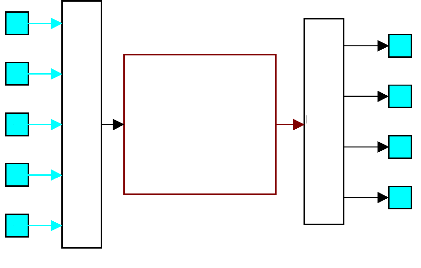
1
west
2
ibeta
thetaest
3
ialphaest
4
ibetaest
Mux
Demux
ialpha
valpha
vbeta
5
k
1
2
3
4
Fig.An4-2 : Bloc "filtre de Kalman".
Estimateur de position: Filtre de Kalman-Bucy
Metafile: "filtre1m"
P0/Q0/R0/Tk
Recliquez 2 fois !
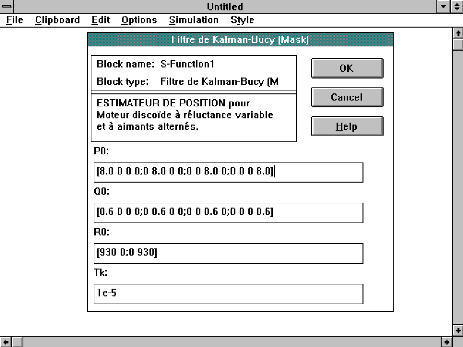
Fig.An4-3 : Masque du bloc "Filtre1.m".
- 152 -
%Fichier Métafile de boesti5.m, bfesti5.m et bfesmli1
:filtre1m %Moteur Fintronic commandé en vitesse, muni d'un estimateur et
régulé sur n estimée
%20:23 16.11.1995
%
%NOTE IMPORTANTE: Les valeurs suivies de "**" doivent
correspondre à ceux de "boesti5.m" et autres
%***********************************************************
%%
function[sys,X0]=filtre1m(t,X,u,flag,P0,Q0,R0,Tk);
%P0=700 / Q0=6 / R0=500 / Tk=30 microseconde
%********************* FILTRE DE KALMAN ********************
%
%**** DECLARATION DES CONSTANTES ESTIMEES:
%
Ld=0.0537 ;%**(mH) - Inductance synchrone d'axe
d (Ld=Ls)
Ls=Ld ;
Rs=1.13 ; %**Ohms - Résistance d'une
phase statorique
phiaim=0.141 ; %**Wb - Flux créé
par les aimants
f=0.0306 ; %**N.m/rad.s-1 - Frottements
visqueux
KT=13.536 ; %**N.m/A - Constante de couple :
KT=3/2*phiaim*Np
Np=64 ; %**Nombre de pas, assimilé au
Nbre de paire de pôles
Jm=0.141 ; %**kg.m2 - Moment d'inertie des
masses tournantes du moteur
Jr=0.1 ; %**kg.m2 - Moment d'inertie des masses
tournantes de la machine
Tr0=3 ; %**N.m - Couple résistant
résiduel dû aux aimants
T=0 ; %**N.m - Couple résistant à
n=0
%
J=Jm+Jr ; %kg.m2 - Moment d'inertie total:
Moteur/machine
%
pL=phiaim/Ld ; %Simplification des notations
RL=Rs/Ld ; %Simplification des notations
KJ=KT*Np/J ; %Simplification des notations
%
Q=Q0 ; %Matrice de variance-covariance
représentatif des
%bruits sur le système v (coefficients de la diagonale)
R=R0 ; %Matrice de variance-covariance
représentatif des
%bruits sur les mesures w (coefficients de la diagonale)
%
% k ;%Constante représentative de l'évolution de la
charge
;%Trma=T+kw2
% Tk ;%Pas d'échantillonnage: 10 micro
sec.(déclaré dans simulink)
%
%**** NOTATIONS :
%
% X(1): dialphaest/dt, X(2): dibetaest/dt, X(3): dwest/dt, X(4):
dthétaest/dt
% X(5): ialphaest, X(6): ibetaest, X(7): west, X(8):
thétaest
% F: matrice des dérivées partielles, C: matrice de
commande
% Fd: matrice de transition des dérivées
partielles
% u(1): ialpha, u(2): ibeta, u(3): valpha, u(4): vbeta, u(5):
k
% Y: Matrice de sortie;
%
%**** DECLARATION DE LA MATRICE UNITE (4,4) :
I=eye(4);
%
%**** DECLARATION DE LA MATRICE DE COMMANDE C : Y=CX :
%y1=ialpha, y2=ibeta
%
C=[1 0 0 0
0 1 0 0];
if flag==2
n=t/Tk;
m=floor(n+1e-13*(1+n));
if abs(round(m-n))<1e-8
%
%**** EVOLUTION DE f(x)- VARIABLES D'ETATS ESTIMEES
X(5),X(6),X(7),X(8) :
%Méthode d'Euler
%
% Variation de ialpha estimé X(5): X(1);
X(1)=X(5)+Tk*(-RL*X(5)+pL*X(7)*sin(X(8))+u(3)/Ls);
%
% Variation de ibeta estimé X(6): X(2);
X(2)=X(6)+Tk*(-RL*X(6)-pL*X(7)*cos(X(8))+u(4)/Ls);
%
% Variation de w estimée X(7): X(3);
xm3=KJ*X(6)*cos(X(8))-KJ*X(5)*sin(X(8))-Np/J*f*X(7)-Np/J*(Tr0+T)*sign(X(7))-
Np/J*u(5)*X(7)*abs(X(7));
X(3)=X(7)+Tk*xm3;
%
% Variation de théta estimée X(8): X(4);
X(4)=X(8)+Tk*(X(3)+X(7))/2;
%
%**** PREMIERE ESTIMATION DU VECTEUR D'ETAT (avant les mesures et
correction):
% XM=Xest(k/k-1)
% XM=[X(1)
X(2)
X(3)
X(4)];
%
%**** MISE EN MEMOIRE DE LA MATRICE DE VARIANCE COVARIANCE DE
L'ERREUR
% SUR LA DEUXIEME ESTIMATION PP=P(k/k):
%
PP=[X(9) X(10) X(11) X(12)
|
X(13)
|
X(14)
|
X(15)
|
X(16)
|
|
X(17)
|
X(18)
|
X(19)
|
X(20)
|
|
X(21)
|
X(22)
|
X(23)
|
X(24)];
|
%
%**** CALCUL DE LA MATRICE DES DERIVEES PARTIELLES DE f(x), F(x):
%
F(1,1:4)=[-RL 0 pL*sin(X(8))
pL*X(7)*cos(X(8))];
F(2,1:4)=[0 -RL -pL*cos(X(8))
pL*X(7)*sin(X(8))];
F(3,1:3)=[-KJ*sin(X(8))
KJ*cos(X(8))-Np/J*f-2*Np/J*u(5)*abs(X(7))];
F(3,4)=[-KJ*X(5)*cos(X(8))-KJ*X(6)*sin(X(8))];
F(4,1:4)=[0 0 1 0];
%**** CALCUL DE LA MATRICE DE TRANSITION Fd(x) de F(x)
% par la méthode du développement limité:
I+FT+(FT)2/2!+... :
% Fd=I+Tk*F;
%
%**** DISCRETISATION DE LA MATRICE DE VARIAN. COV. Q
% par la méthode des trapèzes :
% Qd=(Fd*Q*Fd'+Q)*Tk/2;
%
%**** DETERMINATION DE LA MATRICE DE VARIANCE COVARIANCE DE
L'ERREUR
% SUR LA PREMIERE ESTIMATION PM=P(k/k-1) :
% PM=Fd*PP*Fd'+Qd;
%**** CALCUL DE LA MATRICE DE KALMAN K (correction) :
%
K=PM*C'*inv(C*PM*C'+R);
%
%**** MESURE DES COURANTS REELS ialpha ET ibeta POUR COMPARAISON
:
%
Y=[u(1);u(2)];
%
%**** CORRECTION DE L'ESTIMATION DU VECTEUR D'ETAT ESTIME APRES
MESURES:
% XP=Xest(k/k) et XM=Xest(k/k-1)
% XP=XM+K*(Y-C*XM);
%
%**** DETERMINATION DE LA MATRICE DE VAR. COVAR. DE L'ERREUR
% SUR LA DEUXIEME ESTIMATION PP=P(k/k):
% PP=(I-K*C)*PM*(I-K*C)'+K*R*K';
% ou
%PP=PM-(K*C*PM)
%
%**** MISE EN MEMOIRE DE XP=Xest(k/k) et PP=P(k/k)
X(5)=XP(1);
X(6)=XP(2);
X(7)=XP(3);
X(8)=XP(4);
X(9:24)=[PP(1,1:4)';PP(2,1:4)';PP(3,1:4)';PP(4,1:4)'];
sys=X;
else
sys=X;
end
%
%**** RETOUR AU VARIABLES DE SORTIE west et thétaest
% + ialphaest ET ibetaest :
%
elseif flag==3
sys=[X(7);X(8);X(5);X(6)];
%
%**** RETOUR AUX CONDITIONS INITIALES :
%
elseif flag==0
%
%**** DECLARATION DU NOMBRE DE PARAMETRE A TRAITER :
%
sys=[0,24,4,5,0,0];
%
%**** DECLARATION DES CONDITIONS INITIALES
% dialpha0, dibeta0, dw0, dthéta0, ialpha0, ibeta0, w0,
théta0 :
%
X0(1:8)=[0;0;0;0;0;0;0;0]; %**
%P0=P(0/0)
X0(9:24)=[P0(1,1:4)';P0(2,1:4)';P0(3,1:4)';P0(4,1:4)'];
%
else sys=[];
end
%*********** Fichier Métafile de bfesmli1.m
******************
%Moteur Fintronic commandé en boucle fermée dans le
repère as, bs, cs
%Filtre de Kalman (filtre1m.m) fonctionnant en paralléle
%Régulation de vitesse, avec onduleur, avec nest et thetaest %Machine:
Tr=T+kw2
%18:17 13/10/1995
%NOTE IMPORTANTE: Les valeurs suivies de "**" doivent
correspondre à ceux de "filtrem.m" %PARAMETRES DE SORTIE GRAPHIQUE ET DE
SIMULATION:
%********** Méthode : EULER ***************
STT =0.0 ; %s - Start Time
ST =0.08 ; %s - Stop Time
MISS=2*1e-4 ; % - Min Step Size
MASS=2*1e-4 ; % - Max Setp Size
TOL =1e-4 ; % - Tolérance
bt=10000 ; %Base de temps de l'horloge
p1=10000 ; %Nbre de points (sortie graphique)
%
%MODULATEUR MLI:
e=0 ; % Entrée des relais, changement
d'état
U=810 ; %volts - u/2 : Valeur maxi de la
modulante
son=U/2 ; % Sortie relais (Amplitude de
l'impulsion)
soff=-U/2 ;
%Up=410 ; %volts - Valeur crête de la porteuse
%f=2400 ; %Hz soit un rapport des fréquences m=39
%Remarque: La dent de scie est réalisée par un bloc
fonction pré-défini par Simulink%
%
%PARAMETRES DU MOTEUR A RELUCTANCE VARIABLE ET A AIMANTS ALTERNES
"FINTRONIC":
%In=9,3A / Imax=13A / n(nominale)= 60tr/min / Tn=200N.m /
fn=64Hz/ Vn=220volts
Ld=0.0537 ; %**(mH) - Inductance synchrone d'axe
d (Ld=Ls)
Rs=1.13 ; %**Ohms - Résistance d'une
phase statorique
phiaim=0.141 ; %**Wb - Flux créé
par les aimants
f=0.0306 ; %**N.m/rad.s-1(élec) -
Frottements visqueux
KT=13.536 ; %**N.m/A - Constante de couple:
KT=3/2*Np*phiaim
Np=64 ; %**Nombre de pas du moteur
Jm=0.141 ; %**kg.m2 - Moment d'inertie du
moteur
%
%PARAMETRES MACHINE:
Jr=1.2 ; %**kg.m2 - Moment d'inertie de la
machine entrainée
Tr0=3 ; %**N.m - Couple statique du aux
aimants
T=0 ; %**N.m - Couple résistant
J=Jr+Jm ; %kg.m2 - Moment d'inertie de
l'ensemble
%
% PARAMETRES DES CONDITIONS DE FONCTIONNEMENT
Tmax=130 ; %N.m pour
nref=60 ; %tr/min
wref=2*pi*Np*nref/60; k=(Tmax-T)/wref/wref;
%
theta0=0*pi/180 ; %degré;
%Vmin=-600 ; %volts - Limitation de la
tension
%Vmax= 600 ; %volts - Limitation de la
tension
psiref=0*pi/180 ; %Degré - Couple maxi
pour psi=0;
%
tec1=0 ; %s - A-coups de couple machine;
ec1 =0 ; %N.m - A-coups de couple machine;
%---- Régulateur de courant
kp=150 ; %Gain des correcteurs
ki=80 ; %Coef d'intégration des
correcteurs
%
%---- Régulateur de vitesse
kvp=20 ; %Gain des correcteurs;
kvi=80 ; %Coefficient d'intégration;
Lmin=-300 ; %N.m
Lmax=300 ; %N.m
tnref=0.00 ; % s - Limitation de la
référence de vitesse
tev1=0.04 ; % - A-coups de vitesse n°1 (s /
tr/min)
ev1=0 ; % - A-coups de vitesse n°2
tev2=0 ;
ev2=0 ;
tev3=0 ; % - A-coups de vitesse n°3
ev3=0 ;
%
% Génération des bruits blancs
brsi=1/3 ; %x3 maxi A - bruits de mesures sur
les courants
brsv=0.2 ; %x3 maxi volts - bruits de mesures
sur les tensions
%
%Bruits sur le système:
brdias=140 ; %x3 maxi A - bruits sur la
variation de ias
brdibs=150 ; %x3 maxi A - bruits sur la
variation de ias
brdics=160 ; %x3 maxi A - bruits sur la
variation de ias
brdw=20 ; %x3 maxi rad/s - bruits sur la
variation de w
brdt=20 ; %x3 maxi ° - bruits sur la
variation de théta
%
%Filtrage des tensions vas, vbs et vcs par filtres pass-bass:
%fc=1500 ;%Hz - Fréquence de coupure
%ordre=2 ;% - Ordre
%
%CONDITIONS INITIALES:**
ias0=0 ;ibs0=0 ;ics0=0; w0=0 ;kvi0=0 ;ki0=0;
%
%Grandeurs de sortie (plot):
%nn / n / nref / En / Enpc / nest / vas / vbs / vcs
%valpha / vbeta / valphab / valphaest / Vs / eas
%Enthetapc / theta / thetaest / Etheta
%ias / ialpha / ibeta /Is / ialphab (bruité) / ialphaest /
ibetaest
%Tref / Trma / Tem / Tr
%ds (porteuse) / vasreg / vbsreg / vcsreg / vasf (filtré)
/ vbsf / vcsf
%vasmli / vbsmli / vcsmli / sr1 / sr2 / sr3
QUELQUES PHOTOS
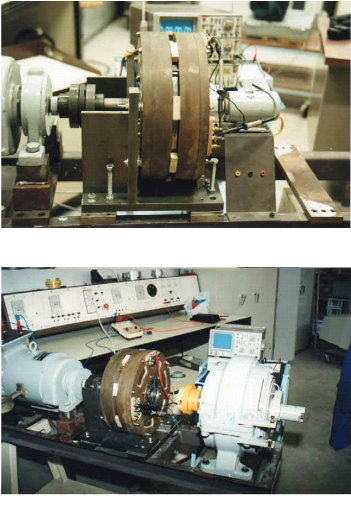
Photo 1
Photo 2
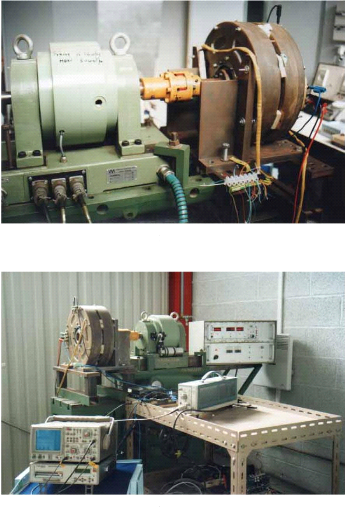
Photo 3
Photo 4
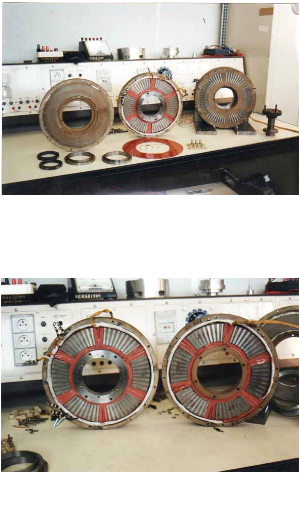
Photo 5
Photo 6
- 161 -

Photo 7
Photo 8
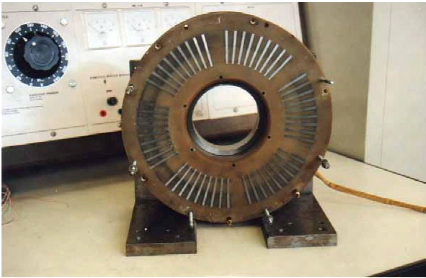
Photo 9


