|
UNIVERSITE SAAD DAHLEB DE BLIDA
Faculté des Sciences de
l'Ingénieur
Département de Génie Mécanique
MEMOIRE DE MAGISTER
Spécialité : Construction
ETUDE DE L'INFLUENCE DES EFFETS D'ECHELLE DANS
LE MODELE DE
DUGDALE À TRAVERS LE CAS D'UNE
BANDE INFINIE SOUMISE À UN
CHARGEMENT
ANTI PLAN
Par
BRICK CHAOUCHE Amine
Devant le jury composé de
M. OUALI Professeur, U. de Blida Président
A. AIAD Maître de conférence, U. de Blida
Examinateur
K. AZOUAOUI Maître de conférence, U. de Bab Ezzouar
Examinateur
H. FERDJANI Maître de conférence, U. de Blida
Rapporteur
RÉSUMÉ
Le but de ce travail est de montrer, dans le cadre de la
mécanique de la rupture avec le modèle de rupture de Dugdale-
Barenblatt, ou de façon plus générale, les modèles
de forces cohésives, que les défauts de petite taille devant la
longueur caractéristique du matériau ont pratiquement peu
d'influence sur les capacités de résistance d'une structure. On
traite pour cela l'exemple d'une bande contenant une fissure parallèle
à la face supérieure, en résolvant une équation
intégrale singulière obtenue par conversion analytique des
équations d'élasticité, la résolution de fait en
utilisant les polynômes de Chebyshev.
&'()
L, 1234.2 bHA 4)J,M) N(O90@K9*+ ,-. (J0.
1234.2 5621 713834.2 790:;.2 <30=.2 Û+ ?,@*A 3B CD2EF.2 bHA
I) JF-.2
~ DUGDALE CP9QR S,4=TD,U V.W
~ \3(=.2
,-]^_. \`23) ab N(O \3T]c i=Ut1 0B,eTQ 90f C]0gh
C.,i CD2E1 jT0D
\1F=T) N(O FQ:Jti 404kJ
CMP9^U J]J2 C4* I) L ~ C0(0(]c CMP)L. V.W L ÛJ2J c CJi=Q
N.AÛJ2JT.24.1,=) JzJ]c
jT0
·
·
·
.Chebyshev 1LF].2
ABSTRACT
The goal of this work is to prove that, within the framework of
Fracture Mechanics with the cohesive forces model, or Dugdale- Barenblatt
model, the defects the size of which are small compared to the material
characteristic length are practically without influence on the limit loads of
the structure. For that we treat the case of an infinite strip containing a
Dugdale crack parallel to its boundaries. The problem is formulated in term of
a singular integral equation obtained by transforming analytically the
equations of elasticity. The resolution is done using Chebyshev polynomials.
TABLE DES MATIERES
REsUMEtttttttttttttttttttttttttttttttt. (1) TABLE
DEs MATIEREsttttttttttttttttttttttt.tt.. (4) LIsTE DEs sYMBOLEs
ttttttttttttttttttttttttt.. (6)
INTRODUCTIONttttttttttttttttttttttttt.ttt.. (9)
1. ETUDE BIBLIOGRAPHIQUE tt.tttttttttttttttt....tt.
(15) 1.1 Introductionttttttttttttttttttttttt..tt..t...
(15) 1.2 Lois d'interface des modèles de force
cohésive (15)
1.2.1 Modèle de Dugdaletttttttttttttttttt.tttt
(16)
1.2.2 Modèle de Dugdale
régularisétttttttttttttt.tttt (17)
1.2.3 Modèle de Needlemanttttttttttttttttttttt.
(18) 1.2.4 Modèle de Tvergaardttttttttttttttttt.tttt..
(20) 1.3 synthèse des travaux de Ferdjani et
altttttttttttttt..ttt. (21)
1.3.1 Cas d'une plaque pré fissuré ou
trouéttttttttttt..tt.tt (21)
1.3.2 Modèle de Dugdale tttt..ttttttttttttt..ttt.t
(22)
· Cas d'une fissure
préexistantettttttttttttt...tttt.. (22)
· Cas d'une cavité circulairettttttttttttttt..tttt
(25)
1.3.3 Modèle de Dugdale
régulariséttttttttttttt.tt.ttt (29)
1.4. Demi plan contenant une fissure rectilignetttttttttttt.ttt
(32)
2. Position du problème
traitéttttttttttttttttttt..t..ttt (40)
2.1 La phase cohésivetttttttttttttttttttttt..ttt
(43)
2.2 La phase propagationttttttttttttttttttt.tt.ttt
(45)
2.3
Conclusionttttttttttttttttttttttt.ttt.tt
(46)
|
3. Dérivation de l'équation
intégrale.................................................................
|
(47)
|
|
3.1 Introduction
|
(47)
|
|
3.2 Les données de la transformation
|
(47)
|
3.3 Démonstration de la convergence uniforme de
l'intégrale I............................... (53)
|
3.4
Conclusion.......................................................................................
|
(55)
|
|
4. Résolution de l'équation
intégrale.................................................................
|
(56)
|
4.1
Introduction.......................................................................................
|
(56)
|
4.2
Résolution........................................................................................
|
(56)
|
4.2.1 Introduction des quantités
normalisées...............................................
|
(57)
|
|
4.2.2 Application de la méthode de résolution
standard des équations intégrale...... (58)
4.2.3 Évaluation numérique des différentes
intégrales.................................... (60)
4.2.4 Evaluation numérique de L(r,
s)..................................................... (60)
|
4.3 Formule donnant le facteur d'intensité de
contrainte.......................................
|
(63)
|
|
4.4 Formule donnant l'ouverture de la
fissure...................................................
|
(63)
|
|
4.5 Etude de
convergence............................................................................
|
(64)
|
4.6 Etude du cas de fissure dans un milieu
infinie...............................................(66)
4.6.1 Equation
intégrale.........................................................................(66)
4.6.2
Phase
cohésive.............................................................................(67)
4.6.3
Contrainte de
rupture.....................................................................(68)
4.6.4
Phase de
propagation.....................................................................(68)
4.7
Conclusion
.......................................................................................(69)
5. Présentation des
résultats...........................................................................
(70)
|
|
5.1 Introduction
(70)
|
|
5.2 La phase cohésive
|
(70)
|
5.3 La charge de rupture
|
(72)
|
5.4 La phase de propagation
|
(72)
|
6. Conclusion
(74)
|
|
|
|
Bibliographies
(75)
|
|
LISTE DES SYMBOLES
ö : Densité d'énergie de surface.
[[un ]] : saut de déplacement normale
(ouverture de la fissure) en mode I pure.
G : Taux de restitution d'énergie. Gc : Taux
de restitution d'énergie critique.
Ô0 : Le saut critique de
décohésion.
Ô, : Déplacement tangentiel.
Ôc : Ouverture critique de rupture
(caractéristique des modèles cohésive).
Ôn : Discontinuité du
déplacement normale.
ac : Contrainte critique
(caractéristique du matériau).
an : Contrainte normale d'interaction entre
les lèvres de la fissure.
a, : Contrainte tangentielle.
/0 : Position de la pointe de fissure initial (ou
diamètre du défaut initial dans le cas de trou) /a : Position de
la zone non cohésive.
/c : Position de la zone cohésive.
/cc : Position de la zone cohésive continuum.
L : Largeur de la plaque fissuré.
F : La fissure.
Fn : Partie non cohésive de la fissure.
Fc : Partie cohésive de la fissure.
Fc : Partie cohésive continuum de la
fissure.
aco :Charge appliquée.
x1 : Direction parallèle a la fissure.
x2 : Direction normale a la fissure.
x3 : Direction perpendiculaire a la plaque.
K1 : Facteur d'intensité de contrainte en mode
I.
vi : Potentiel.
SI : Domaine de la plaque fissuré.
D: La fissure (défaut).
ylc :Longueur caractéristique qui se
déduit de l'ouverture critique êc et les
constantes
matérielles.
E: Module de young.
y : Coefficient de poison. p : Module de
cisaillement.
aa :Charge d'amorçage de la fissure.
a,.: Charge de rupture.
q(x1) :Répartition des contraintes normales
exercées sur les lèvres de la fissure. h: Profondeur de la
fissure.
2co : Contrainte de cisaillement
appliquée.
x3 :Direction normale a la plaque.
W : Champ de déplacement.
ux : La réponse élastique (le champ de
déplacement).
u1 : Composante du déplacement dans la
direction 1.
u2 : Composante de déplacement dans la
direction 2.
u3 : Composante de déplacement dans la
direction 3.

n : La normale a la plaque.
2 : Champ de contrainte dans le domaine SI .
2c : Contrainte tangentielle critique
(caractéristique du matériau).
223 : Contrainte de cisaillement
appliquée sur les lèvres de la fissure dans la direction
x3 . 213 : Contrainte de cisaillement
appliquée sur les lèvres de la fissure dans la direction
x1 . Irc : Domaine fissuré.
K3 : Facteur d'intensité de contrainte en mode
III.
ô(xi ): Chargement en fonction de
xv .
t : Variable caractérisant la direction x,bornéesur
l'intervalle [- la,ln] résulte des
transformations intégrale.
k(xi , t) : second partie du premier terme de
l'équation intégrale appelée le kernel.
ø(t) : Fonction de densité d'énergie.
Tn : Polynômes de Chebychev du premier ordre.
w : Fonctions poids associés aux polynômes de
Chebychev du premier ordre. Un: Polynômes de Chebychev de
second ordre.
N :Nombre d'équation du système d'équations
algébrique obtenu par application de la méthode de collocation
sur l'équation intégral.
r. : Points de collocation.
tk :Noeuds.
n: Nombre de noeuds.
9
INTRODUCTION
L'objet de la mécanique de la rupture est de
déterminer l'évolution d'une ou plusieurs fissures dans une
structure en fonction du chargement auquel elle est soumise. Le cadre de la
mécanique de la rupture fragile se limite à l'étude de la
fissuration des milieux continus supposés élastiques. Cette
hypothèse, bien qu'idéaliste, reste le cadre d'étude de
nombreux chercheurs et ingénieurs préoccupés de
sûretés concernant la propagation de défauts dans les
structures en service. C'est le cadre des travaux de LAVERNE [33].
Dans ce formalisme, les principaux résultats ont
été obtenus à partir de la théorie de GRIFFITH. Ce
dernier associe à toute fissure une énergie de surface
proportionnelle à sa longueur. Il postule qu'il y aura propagation et
donc augmentation de l'énergie de surface si cette dernière est
parfaitement compensée par la restitution de l'énergie
élastique causée par l'avancée de la fissure. Dans le cas
de problèmes quasi-statiques, ce critère peut se formuler en
terme de taux de restitution d'énergie élastique usuellement
noté G. Ce dernier correspond à la variation d'énergie
potentielle lors d'un accroissement infinitésimal de la fissure. Le
critère de GRIFFITH stipule alors qu'il n'y aura pas propagation tant
que :
G < Gc
Ou Gc désigne le taux de restitution
d'énergie critique et correspond à la ténacité du
matériau.
Bien qu'elle connaisse encore un vrai succès, cette
théorie renferme des insuffisances notoires.
- La première concerne l'initiation de la fissuration,
la théorie de GRIFFITH est incapable de rendre compte de
l'amorçage de fissures, sauf dans des cas très particuliers ou la
structure possède des singularités fortes. En effet, prenons
l'exemple d'un milieu bidimensionnel contenant une fissure rectiligne Z,
sollicitée en mode I, et supposons l'absence de singularités dans
le problème d'élasticité initiale. Le critère de

10
GRIFFITH prévoit que la fissure se propage pour un
chargement en 1 / . Si / tend
vers zéro, on en déduit que pour un milieu sain
la fissure ne pourra pas s'amorcer sous un chargement fini.
- La seconde lacune porte sur son incapacité à
prédire seule le trajet spatial des fissures. Pour un milieu
bidimensionnel, le critère ne prend en compte que la longueur de fissure
or l'évolution spatiale nécessite une seconde information qui
correspond à un critère de branchement.
- Enfin, une troisième lacune concerne le trajet
temporel de la fissure, seules les propagations progressives sont
traitées de façon satisfaisante. En effet des situations ou
l'inégalité du critère est violée peuvent survenir.
Celles-ci correspondent au cas de figure ou l'excès de restitution
d'énergie élastique conduit à l'apparition
d'énergie critique. La propagation est alors considérée
comme brutale.
On peut résumer ces trois points en disant que le
problème majeur de la théorie de GRIFFITH est de ne pas laisser
assez de souplesse à l'évolution spatio-temporelle des fissures.
De nombreux aménagements tentent d'y remédier proposant des
ingrédients spécifiques à chacun des problèmes
[33].
Le modèle de rupture de DUGDALE- BARENBLATT ou de
façon plus générale les modèles de forces
cohésives présentent l'avantage [33], sur le modèle de
GRIFFITH, de rendre compte de l'amorçage de fissure dans une structure
saine en termes d'un critère en contraintes, cf. par exemple DEL PIERO
(1999) [12], DEL PIERO et al. (2001) [13], CHARLOTTE et al. (2000) [7] ou
LAVERNE et al (2004) [34]. De façon générale, les
modèles de force cohésifs sont de plus en plus employés et
il est donc nécessaire de connaitre de mieux en mieux leurs
propriétés pour pouvoir les utiliser à bon escient. En
particulier les effets d'échelle qui les accompagnent du fait de la
présence d'une longueur caractéristique sont mal connus. Il ne
s'agit évidement pas ici de valider le modèle de DUGDALE, ni de
voir pour quel type de matériau il peut être utilisé, mais
de voir s'il est assez robuste pour que, grâce aux effets
d'échelle qu'il induit, la réponse des structures ne soit pas
sensible à des défauts de petite taille. L'étude sera donc
essentiellement théorique et numérique. De plus, nous
envisagerons seulement des zones cohésives linéiques [19].

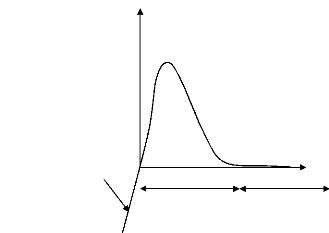
0
G c

Sc [[un]]
Densités d'énergie de surface dans les
modèles de Dugdale et Griffith
Ces modèles, formulés en termes
énergétiques, consistent à supposer que la densité
d'énergie de surface 0 dépend de façon non
triviale du saut de déplacement [[un ]],
contrairement au modèle de GRIFFITH ou elle est constante.
Ainsi dans le modèle de DUGDALE, en supposant que l'ouverture se fait en
mode I pur, elle s'écrit :
=Sc
=Sc
0 = G
c .
(nu n11) I [[uSnli si [[u nli
c rr Ti
Gc si L'uni]

[[un ]]désigne le saut du déplacement
normal, G c représente le taux de restitution
d'énergie critique de la théorie de GRIFFITH, alors que
Sc est une longueur interne caractéristique des
modèles de forces cohésives. Le rapport G c
Sc a la dimension d'une contrainte et représente la
contrainte critique du matériau :
=
Gc
a .
c
Sc
En termes de forces cohésives, la contrainte normale
an d'interaction entre les lèvres de la
fissure vaut
donc ac tant que [[un ]] <
Sc et s'annule dés que [[un ]] >
Sc . En pratique, les lèvres
des fissures sont donc
divisées en deux zones : une zones dite cohésive dans laquelle
les
forces cohésives ne sont pas nulles et une zone dite
non cohésive dans laquelle il n'y a plus de force cohésive. La
zone cohésive se situe près de la pointe, là ou
l'ouverture ne dépasse pas le seuil critique äc
[19].
Le fait que acjoue le rôle de
contrainte critique se vérifie dans l'étude d'une barre en
traction simple. En raisonnant comme DEL PIERO (1999) [12] ou
CHARLOTTE et al.
(2000) [7] à partir d'un principe de minimisation
d'énergie, on montre que la réponse
élastique (le champ
de déplacement est de la forme u(x) = axlE,E étant le
module d'Young)
cesse d'être un minimum relatif de l'énergie
(totale) de la barre lorsque la contrainte
appliquée a
dépasse la contrainte critique ac . La
conséquence directe de cette présence d'une
contrainte critique dans le modèle est qu'une structure
donnée ne pourra pas supporter n'importe quel niveau de chargement
conformément aux résultats classiques des théories de
calcul à la rupture ou d'analyse limite, cf. SALENCON (1983) [40].
Cependant il y a lieu de distinguer les charges limites élastiques, i.e.
les charges à partir desquelles doit développer une fissuration,
des charges limites proprement dites, i.e. des charges maximales que peut
supporter la structure même en se fissurant. Dans la suite nous
désignons les premières comme charges d'amorçage et les
secondes comme charges de rupture [19].
Rappelons tout d'abord ce qu'il en est de la charge
d'amorçage dans le cas du modèle de GRIFFITH. Notons que seuls
les défauts du type fissure, i.e. les défauts présentant
une
singularité « forte » en r pour le champ des
déplacements, sont susceptibles de se propager.
Les cavités,
les entailles et autres défauts non assez « pointus »
induisent une singularité trop
faible pour donner un taux de
restitution d'énergie non nul. Pour une fissure de petite taille 1
et de normale n, placée en un point x où les
contraintes normales en l'absence du défaut
seraient d'amplitude a, le taux de restitution
d'énergie est de l'ordre de a21. Il tend donc
vers
0 lorsque 1tend vers 0. Donc, dans la théorie de GRIFFITH ou les
fissures ne se propagent que
si le taux de restitution d'énergie
atteint la valeur critique Gc, les défauts de petite taille
sont
inoffensifs. C'est évidement un atout pour ce
modèle. Mais en contrepartie, le modèle de GRIFFITH est trop
conservatif puisqu'il ne sait pas rendre compte de l'amorçage de
fissures en dehors de points de fortes singularités, cf. FRANCFORT et
al. (1998) [25].
Si l'on abandonne le modèle de GRIFFITH au profit du
modèle de DUGDALE, le critère de propagation d'un défaut
ou d'amorçage de fissure ne se formule plus en termes du taux de
restitution d'énergie critique Gc, mais en termes de la
contrainte critique ac, cf.
CHARLOTTE et al. (2000) [7] et LAVERNE et al. (2004) [34]. Ce
faisant, on pourrait a
priori s'attendre à ce que la forme des défauts
joue un rôle essentiel et que ceux favorisant les concentrations de
contraintes s'avèrent plus nocifs. En particulier les fissures,
défauts qui induisent des singularités, devraient être
sensiblement plus défavorables que les cavités circulaires,
défauts qui par leur forme «parfaite» sont ceux qui engendrent
le moins de concentration. Ceci se révèle vrai pour la charge
d'amorçage, mais faux pour la charge limite. En effet, il est clair que
la charge d'amorçage est très sensible à la forme du
défaut puisqu'elle est directement liée aux concentrations des
contraintes induites par le défaut sur la réponse
élastique. Ainsi, dans le cas d'une fissure préexistante, du fait
de la présence d'une singularité de contraintes en pointe de
fissure, la charge d'amorçage est nulle, de nouvelles
discontinuités apparaissent dès la mise en charge. Par contre,
dans le cas d'un trou circulaire dans une plaque, la concentration de
contraintes est finie et donc la charge d'amorçage n'est pas nulle.
Nous verrons par contre que la charge de rupture, elle, est
beaucoup moins sensible à la forme du défaut qu'à sa
taille. En particulier, du fait de la présence de la longueur
caractéristique êc dans le modèle de
DUGDALE-BARENBLATT, les effets d'échelle sont
importants. La charge de rupture dépend de façon
essentielle du rapport entre la taille du
défaut et la longueur
caractéristique êc . Un résultat majeur serait
de montrer que, quelle que
soit la forme du défaut, la charge de rupture tend vers
la contrainte critique ac lorsque la taille
du défaut tend vers 0, à longueur
caractéristique fixée (ou de façon équivalente,
lorsque la
longueur caractéristique êc tend vers
l'infini, a taille du défaut fixée). Ceci signifierait qu'avec
le modèle de DUGDALE-BARENBLATT, les structures sont
insensibles aux petits défauts et se comportent comme des structures
saines, et ce bien qu'elles développent des zones d'amorçage
avant rupture [19].
Ce résultat a été obtenue par FERDJANI et
al [19], [20] pour une plaque contenant une fissure droite ou une cavité
circulaire soumise a une traction simple est pour les modèles de DUGDALE
et DUGDALE régularisés, et pour un milieu semi-infini contenant
une fissure droite [21] soumise à un cisaillement anti-plan, pour le
modèle de DUGDALE.
Dans le but de généraliser le résultat
obtenu, on propose d'étudier le problème antiplan d'une bande
infinie isotrope contenant une fissure cohésive parallèle
à la face supérieure de la bande et localisée au milieu.
Le modèles de DUGDALE-BARENBLATT (DUGDALE, 1960 [15]) est utilisé
pour modéliser l'interaction entre les lèvres de la fissure. En
utilisant les transformations de fourrier, les équations
d'élasticité sont converties analytiquement en une
équation intégrale singulière. A cause de la
présence de saut des discontinuités dans la distribution du
chargement le long des lèvres de la fissure, les méthodes
standard de
résolution de l'équation intégrale
singulière obtenu, ne sont pas appropriées. On utilise la
méthode proposée par (IOAKIMIDIS, 1980 [32]) pour traiter ce type
de chargement.
Ce mémoire est organisée comme suit, le premier
chapitre est consacré a la recherche bibliographique et contient une
présentation générale des modèles de forces
cohésives, suivi d'une présentation des travaux de FERDJANI et
al. Le chapitre 2 contient la présentation du problème
traité. Le chapitre 3 est consacré à
l'établissement de l'équation intégrale puis à la
résolution. Le chapitre 5 est consacré à l'exposé
des résultats des calculs. Enfin, une conclusion
générale.
CHAPITRE 1
ETUDE BIBLOGRAPHIQUE
1.1 Introduction :
Nous commençons par présenter une synthèse
des différents modèles de forces cohésives
présentes dans la littérature.
1.2 Lois d'interface des modèles de force
cohésive [33]:
On appelle loi d'interface une relation entre le
déplacement relatif et la force d'interface entre les lèvres
d'une fissure. Dans cette partie nous présenterons quelques unes d'entre
elles basées sur la notion de force cohésive. Cette
dernière s'appuie sur des observations expérimentales en pointe
de fissure telles que l'apparition de micro fissures, la croissance de
cavité ou le développement de zones de plastification. Cela
correspond à une zone de transition entre le milieu sain et une vraie
fissure (figure 1.1).
Interaction (forces cohésives)
Fissure Zone cohésive
Figure 1.1 : Schéma de la fissure et de la zone
cohésive.
Les premiers modèles furent introduits par DUGDALE et
BARENBLATT au début des années soixante. Prenant acte du fait que
les contraintes infinies en pointe de fissure, prédites par le
modèle élastique (IRWIN [31]), n'ont pas de signification
physique, ces derniers ont émis l'hypothèse de l'existence d'une
«zone cohésive» (Fracture Process zone dans la
littérature) dans laquelle des forces s'exercent entre les futures
lèvres de la fissure. Dans les années soixante-dix HILLERBORG et
al [30], ont introduit le concept d'énergie de rupture dans les
modèles de force cohésive et proposé quelques relations de
comportement entre la traction et le saut de déplacement pour le
béton. De nombreux modèles ont été
développés depuis, citons en quelques uns :
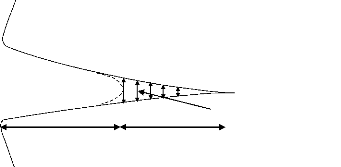
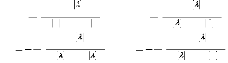
1.2.1 Modèle de DUGDALE [33]:
Ce modèle décrit l'évolution des forces
de traction aa en fonction du saut de déplacement
normale 8a . Le saut reste nul tant que la force n'atteint pas une
valeur critique cra puis le comportement utilisé est celui
d'un solide rigide parfait jusqu'à un seuil d'ouverture 8a
au- delà duquel l'interaction des lèvres devient nulle (Figure
1.2 et 1.3).
Zone
cohésive
Zone non
cohésive
cfa
x1
la
l0
la
x2
Figure 1.2. Schématisation du modèle de
Dugdale-Barenblatt
Fissure initiale
cra
Zone non cohésive
l0
la
Zone
cohésive
la
Zone
cohésive
Continuum
x1
0 8a 8
Figure 1.3 . Loi d'interface de DUGDALE dans la direction
normale.
1.2.2 Modèle de DUGDALE régularisé
[20]:
C'est une combinaison entre le modèle des zones
cohésives continuums (ZCC) (Xie [45]) et le modèle de DUGDALE
(figure 1.4 et 1.5).
a,,
ac
18
80 8c nu ,,II
Figure 1.5. Loi de comportement dans le modèle de DUGDALE
régularisé.
ac désigne la contrainte critique du
matériau, 8c désigne la longueur
caractéristique du modèle, et 80
désigne le saut critique de décohésion. La fissure est
donc divisée en trois
zones représentées sur la figure 1.4.
La loi de comportement, donnant la relation entre les forces
cohésives et l'ouverture des lèvres de la fissure, en supposant
que l'ouverture se fait en mode I pur, est représentée sur la
figure 1.5.
8,, Désigne la discontinuité
du déplacement normale, a,, désigne la
contrainte normale
d'interaction entre les lèvres de la fissure.
1.2.3 Modèle de NEEDLEMAN [38] :
Ce modèle décrit l'évolution des forces
cohésives normale a,, et tangentielle a, en
fonction des composantes normale et tangentielle du saut de
déplacement 8,, et 8, . On
représente sur la Figure 1.6, l'évolution de la
force normale en fonction du saut normal quand le saut tangent est nul.
8c
8,,
a,,
ac
Pénalisation du contact
Zone cohésive Rupture
Figure 1.6. Loi d'interface de NEEDLEMAN dans la direction
normale.
Les forces dérivent d'un potentiel y/ :
a y/
cr --
,, a8,,
,t
a y/
.
cr = a8
t
Ce dernier est choisi comme une fonction polynomiale faisant
intervenir les paramètres ac contrainte critique du
matériau en ouverture, 8c saut critique
au-delà duquel l'interface
entre les lèvres de fissure devient nulle ainsi que la
part de résistance au glissement par
rapport à la
résistance normale. On note que lorsque 8,, < 0 la valeur de
la contrainte normale
dérive du potentiel joue le rôle d'une
pénalisation afin de tenir compte de la condition de non
interpénétration des lèvres de la fissure. Aucune autre
hypothèse n'intervient pour prendre en compte cette condition. Notons
que ce modèle fut repris et modifié par de nombreux auteurs.
Citons par exemple RICE et WANG [39] qui ont proposé une expression
exponentielle du potentiel. La différence avec le modèle
précédent tient au fait que la force tend asymptotiquement vers
zéro quand le saut de déplacement augmente. Ce modèle ne
fait donc pas intervenir le paramètre 8c .
1.2.4 Modèle de TVERGAARD [43] :
Ce modèle reprend le modèle de NEEDLEMAN de 1987
[38] et introduit une notion d'irréversibilité du comportement :
la décharge s'effectue linéairement, ainsi qu'un frottement de
COULOMB post décohésion. On représente sur la Figure 1.7
l'allure de la force tangentielle en fonction du saut tangentiel lorsque le
saut normal est nul.
Notons que le modèle formulé initialement par
l'auteur s'appuie sur un indicateur de décohésion variant de
zéro à un, faisant intervenir le saut normé par le saut
critique, et qui fait office de variable d'endommagement dont dépendent
les forces d'interaction.
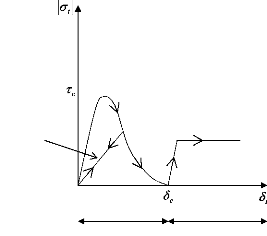
Frottement
0
Zone cohésive
Décharge
Figure 1.7. Evolution de la force tangentielle en fonction du
saut tangent.
D'autres modèles ont été
développés en s'inspirant de celui-ci. Par exemple, CHABOCHE et
al (1997) [6], pour modéliser la décohésion interfaciale
dans les composites à matrice métallique, proposent d'activer le
frottement de COULOMB dés le début de la
décohésion. Citons par ailleurs CHABOCHE et al qui reprennent ce
dernier modèle et introduisent une régularisation visqueuse afin
de lisser les instabilités intervenant dans l'ouverture brutale de
fissure. La réponse dépend alors de la vitesse du chargement.
Cette technique permet de remédier aux problèmes
numériques liés à un saut de solution important difficile
à capter avec des méthodes de type NEWTON. Cela permet d'avoir
une réponse globale continue à tous les
niveaux de chargement mais cette technique modifie les
équations de comportement de l'interface.
Notons par ailleurs que ces lois peuvent être
utilisées soit pour décrire le comportement d'une interface :
séparation de deux parties d'un solide comme la propagation de fissure
(objet d'épaisseur nulle) soit pour représenter le comportement
d'une interphase entre deux matériaux (objet volumique de faible
épaisseur) pouvant représenter une colle. A ce sujet SUQUET [42]
et MICHEL et al [37] ont travaillé sur la modélisation
d'interphase dans les composites à matrice métallique. Ce type de
modèle pose des questions de convergence mathématique du
modèle d'interphase vers le modèle d'interface.
1.3 Synthèse des travaux de FERDJANI et al :
1.3.1 Cas d'une plaque pré fissurée ou
trouée :
La structure consiste en une plaque carré de dimension
SI = (-L,+L) sollicitée en traction et contenant un défaut
centré D et soumis, sur les faces supérieure x2 = +L
et inférieure x2 = -L à une traction uniforme
d'intensité a8 croissante depuis 0. Le défaut
est soit une fissure préexistante perpendiculaire à l'axe de
traction et de longueur 2/0, soit un trou circulaire de rayon
/0 (figure 1.8). L'étude s'effectue dans le cadre des
déformations planes
pour le modèle de DUGDALE, et de contraintes planes pour
le modèle de DUGDALE régularisé, le matériau est
linéairement élastique, homogène et isotrope.
-
L
L
x1
x2
a_
-
Io
Io
a_
Figure 1.8. Géométrie de la plaque contenant le
défaut initial centré
1.3.2 Modèle de DUGDALE [19] :
L'étude consiste à montrer l'influence de l'effet
d'échelle .i.e. du rapport

Sc sur la
Io
contrainte de rupture, pour des facilités de mise en ouvre
numérique on garde une dimension constante du défaut et en fait
varier l'ouverture critique Sc .
· Cas d'une fissure préexistante :
Le défaut initial est une fissure non cohésive de
longueur 2I0 (figure 1.8) La plaque est
supposée infinie. Pour cette étude, on se servira
de la solution donnée par BUI (1978) [4] pour
une fissure
cohésive de longueur 2Ia placée dans un milieu infini,
soumise à l'infinie à une
traction simple d'intensité a_ dans la
direction 2 et ayant a ces extrémités x1 =
#177;Ic une zone
cohésive dont les pointes sont en
x1 = #177;Ia. Les lèvres des zones
cohésives sont soumises à
une contrainte normale de traction d'intensité
constante aa. On peut considérer que
l'approximation faite est d'autant meilleure que la taille du
défaut est plus petite devant la taille du domaine. Le problème
se réduit donc a un problème d'élasticité plane
posé sur un domaine infini fissuré avec une distribution
donnée de forces. Il se résout classiquement à l'aide de
potentiel complexe suivant les techniques développées dans
MUSKHELISHVILI (1963) [36].
Dans la phase d'amorçage, lorsque l0 =
la les contraintes sont singulières dans la réponse
élastique de la structure dés la mise en charge.
Ceci mène à dire que la charge d'amorçage est
nulle
aa = 0 . Une zone cohésive de longueur la se
développe dés la mise en charge. Le
graphe représentant la charge appliqué
a8 en fonction de la position de la pointe d'amorçage
la (figure 1.9) montre que la charge croit de 0 a
aa quand la zone cohésive croit de l0a
l'infini. Ceci est valable tant que l'ouverture en x1 =
la n'atteint pas la valeur critique äa la
charge appliquée correspondante est appelé charge de rupture
a,..
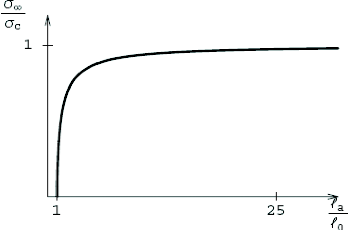
Figure 1.9. Relation entre la charge appliquée et la
position de la zone
cohésive lors de la phase d'amorçage.
La phase de propagation commence lorsque l'ouverture en
lc atteint le saut critique 8c .
Dans ce cas, on doit diminuer la charge si l'on veut que la
propagation de la fissure soit stable. Ceci signifie que la charge de
rupture a,. est en fait la charge limite que peut supporter la
structure.
Dans un diagramme a_ -- la (figure 1.10) est
représenté l'évolution de la fissuration avec
la charge pour une valeur donnée du
8c . On notera que la longueur interne
8c n'intervient que
dans la phase de propagation (et donc évidement dans la
charge de rupture) la charge de rupture valent dans ce cas a,. =
0.76.ac.
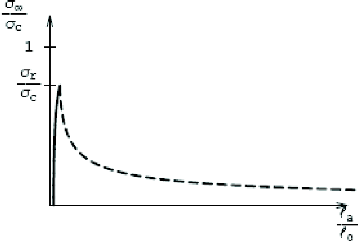
Figure 1.10. Relation entre la charge appliquée et la
position de la zone cohésive :
En trait plain, lors de la phase
d'amorçage, en pointillés lors de la phase de
propagation.
La charge de rupture dépend de façon essentielle
du rapport entre la longueur l0 du défaut initial et la
longueur caractéristique 2c (qui est proportionnelle
à 8c) du matériau, ceci est
représenté dans un diagramme donnant la dépendance de la
charge de rupture par rapport la taille relative de la fissure (figure 1.11),
plus la taille relative du défaut est petite et plus la charge de
rupture se rapproche de la contrainte critique ac du
matériau, et ce bien qu'il y'ait amorçage d'une nouvelle fissure
dès la mise en charge. On peut donc conclure qu'avec la loi
de DUGDALE, la plaque est pratiquement insensible aux petits
défauts initiaux de petite taille de type fissure.
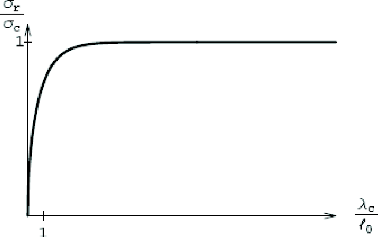
Figure 1.11. Dépendance de la charge de rupture avec la
taille relative de la
fissure initiale.
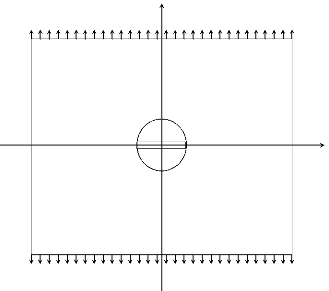
· Cas d'une cavité circulaire :
Le défaut initial est une cavité circulaire de
rayon 10 centré en (0,0) (figure 1.8) les données du
problème sont :
La plaque est de dimensions 20 × 20mm .
Le rayon du trou est de longueur 10 = 1mm .
Le calcul est effectué avec la méthode des
éléments finis.
Le domaine est maillé avec des éléments
triangulaires a 3 noeuds (pour des raisons de symétrie et de conditions
aux limites seul un quart du domaine et maillé), (figure 1.12).
Figure 1.12. Géométrie de la plaque trouée
avec les zones cohésive et non
cohésives.
Pour les données matériau, on choisit celle d'un
polymère PMMA : ac = 72(MPa),E =
3000(MPa),í = 0.36.
Un calcul purement élastique mène à
déterminer la charge d'amorçage aa (la
charge a8 a partir de laquelle la
plus grande contrainte principale atteint la valeur critique
ac en un point de la structure). Pour des raisons de
symétrie et de conditions aux limites la concentration des contraintes a
lieu au bord du trou aux points (#177;l0,0) si la plaque
été de dimension infinie, la contrainte an en
ces points serait exactement égale a 3a8 et la
charge d'amorçage a ac /3 = 24MPa. En raison des
dimension finie de la plaque et des approximations numérique, la charge
d'amorçage calculée aa est égale a
22.2MPa.
Dans la phase de propagation, une zone cohésive
apparaît et s'étend si l'on augmente la charge au-delà
de aa . La longueur de cette zone correspond a un facteur
d'intensité de contrainte nulle 1(1(la ) = 0 .
D'un point de vue numérique, cela nécessiterait d'itérer
sur la valeur de la , la stratégie numérique
adoptée est la suivante :
1. On itère sur la valeur de la en partant de
la valeur obtenu au pas précédant.
2. On calcule l'ouverture [[un ]]au noeud du maillage
le plus proche de la pointe /a.
3. Si cette ouverture est positive, alors on incrémente
/a et on arrête les itérations quand elle devient
négative.
La charge de rupture est déterminée pour une
langueur ëc donnée, suivant un
procédé basé sur une méthode itérative, les
valeurs numériques calculées sont représentées dans
un diagramme ó,. - ëc (figure
1.13).
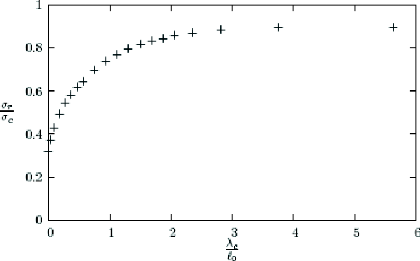
Figure 1.13. Dépendance de la charge de rupture avec la
taille relative de la
fissure.
On remarque que la charge de rupture est une fonction
croissante de ëc , mais elle n'atteint jamais la
valeur óc quelque soit la valeur de
ëc . Ceci est dû au caractère fini des
dimensions de la plaque. En effet, en utilisant un raisonnement
élémentaire de calcul à la rupture, il est facile de voire
que la plaque trouée ne peut pas supporter une charge plus grande que
/
(1- ° L ).ó qui correspond à la
charge d'équilibre de la plaque lorsque la zone cohésive
c
occupe toute la largeur. Compte tenu des valeurs
numériques choisies, la charge de rupture ne
peut donc dépasser 0.9.aa . On voit
que cette valeur est pratiquement atteinte lorsque ëa
= 3l0.
Notons enfin que si l'on faisait tendre la longueur du
défaut vers 0 ou la largeur de la plaque vers l'infini, alors la charge
de rupture tendrait vers aa .
Un calcul de la phase de propagation effectué pour une
position donné de la zone cohésive a permis de vérifier le
résultat précédent concernant la charge limite, suivant un
procédé itératif de détermination de la charge
a_ équilibrant la structure fissurée avec la pointe de la
zone cohésive en la. Ceci a permet
d'obtenir a_ en fonction de la pour un
ëa donné. Lorsque la = l0 on
a évidemment a_ = a,.. Il s'avère que dans tout
les tests effectués a_ est une fonction décroissante de
la , ce qui prouve bien que a,. est une charge limite et
donc la charge
de la structure trouée. Les résultats obtenu pour
cette phase sont présenté sur un diagramme
donnant la relation
entre a_ et la pour une valeur de
äa = 0.01mm (figure 1.14), la charge de
rupture valant 0.450aa .
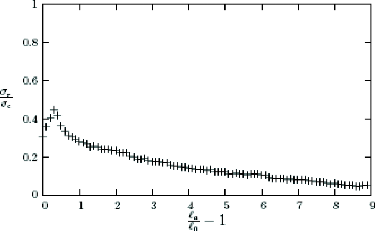
Figure 1.14. Relation entre la charge et la longueur de la
fissure.
1.3.3 Modèle de DUGDALE régularisé
[19]:
|
L'étude consiste a montrer l'influence de l'effet
d'échelle .i.e du rapport
|
gc sur la l0
|
contrainte de rupture, pour des raisons de facilité de mis
en ouvre numérique on garde une dimension constante du défaut et
en fait varier l'ouverture critique gc .
Comme donnés du problème nous choisissons: L
=100(mm), l0 =3(mm).
Pour le matériau celles d'un polymère PMMA.
óc = 72MPa , E = 3000MPa , í = 0.36 . Le
saut critique de décohésion g0 = 0.00402(mm)
.
Les calculs sont fait numériquement par la
méthode des éléments finies pour les deux cas de fissure
pré existante et de la cavité circulaire, le domaine est
maillé par des éléments finis triangulaires a 3 noeuds
(pour des raisons de symétrie un quart du domaine est maillé,
figure 1.15) la ZCC est modélisé a l'aide
d'éléments d'interface quadrangulaires d'épaisseur
nulle.
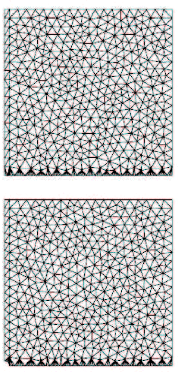
Figure 1.15. Maillage d'un quart du domaine pour le cas du trou
et la fissure.
Comme énoncé précédemment,
l'évolution de la fissure commence par la phase élastique la
charge d'amorçage óa
(ó8 a partir de laquelle l'ouverture dans la ZCC en
points ( #177; la ,0)
atteint le saut critique g0 ), est obtenu en
effectuant un calcul purement élastique est égale a
6.55MPa pour la fissure et a 9.36MPa pour le trou.
Au-delà de óa une zone
cohésive apparaît c'est la phase d'amorçage. Les
résultats de la
phase d'amorçage données pour le trou et la fissure
sont sur la (figure 1.16).


Figure 1.16. Relation entre la charge appliquée et la
position de la zone cohésive
dans la phase cohésive.
On remarque que la charge dans cette phase est une fonction
croissante de la longueur de la zone cohésive. En outre on observe que
les courbes sont identiques, on peut conclure que la sensibilité de la
phase d'amorçage à la forme du défaut est faible.
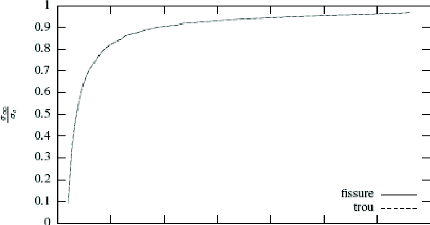
La charge de rupture ó est la contrainte
appliqué correspondant a des ouvertures de la fissure [[un
(#177;l 0)]]= ga et [[un (#177;l
a)]]= g0 . Cette charge est déterminée
pour une longueur caractéristique et pour plusieurs valeurs de la
longueur caractéristique ga (g0
reste fixe). Les valeurs numérique calculées pour la fissure et
le trou sont représentées dans un diagramme
a, -- 8c (figure 1.17), comme
attendu la charge de rupture est une fonction croissante de
8c , on observe que la charge de rupture n'atteint jamais la
valeur ac quelque soit 8c ceci est du
aux dimensions finis de la plaque.

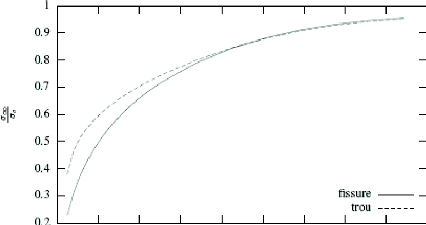
Figure 1.17. Relation entre la charge de rupture et la taille
relative de la longueur
caractéristique 8c .
En effet, en utilisant un raisonnement
élémentaire de calcul à la rupture, il est facile de
voir
~/
que la plaque trouée ne peut pas supporter une charge plus
grande que 1-- 0 L ac qui
correspond à la charge d'équilibre de la plaque
lorsque la zone cohésive occupe toute la largeur de la plaque. Compte
tenu des valeurs numériques choisies, la charge de rupture ne peut donc
dépasser 0.97ac . Notons enfin que si l'on faisait
tendre la longueur du défaut vers 0 ou la largeur de la plaque vers
l'infini, alors la charge de rupture tendrait vers ac.
Il reste à prouver que la charge a, est
réellement la charge maximale que la structure peut supporter. Peur ce
faire, on fixe la valeur de la pointe cohésive /c et on
calcule la valeur de la charge a_et de la pointe cohésive
/a. Nous avons représenté sur la (figure 1.18) la
relation entre a_ et /a pour une valeur de
8c égale à 0.00804 mm respectivement pour le trou
et la
fissure. Il s'avère que ac. est une
fonction décroissante de la, ceci prouve que
ar est une charge
limite et par conséquent la charge de rupture de la
structure. Les charges de rupture sont 0.356c pour le trou
et 0.16sc pour la fissure.
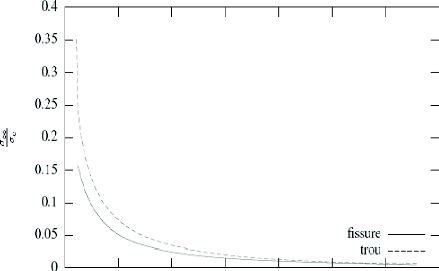


Figure 1.18. Relation entre la charge appliquée et la
position de la zone cohésive
dans la phase de propagation.
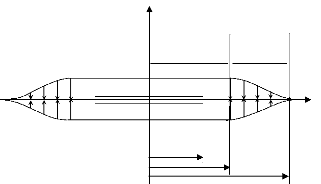
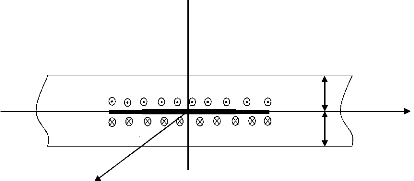
1.4 Demi plan contenant une fissure rectiligne [21]
:
Dans ce cas on considère un demi-plan SI = (--...,+.0)x
(--..., h), contenant un défaut de type fissure
D=[--l0,l0]x{0} de longueur 2l0
parallèle et distant de h de la face supérieure du domaine. Le
milieu est élastique isotrope caractérisé par un module de
cisaillement, . Sur la face supérieure x2 = h et
à l'infini x2 --o. est appliqué un cisaillement
anti-plan uniforme et positift_ , les lèvres de la fissure sont
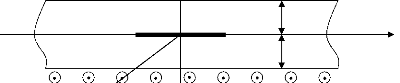
libres. La seule composante de déplacement est dans la direction x3.
x1
L'évolution de la fissure pendant le chargement sous
l'effet du cisaillement anti-plan appliqué suit la loi de
DUGDALE-BARENBLATT.
1-8
h
-
10
10
x3
1-8
x2
Figure 1.19. La charge et la géométrie du
problème original.
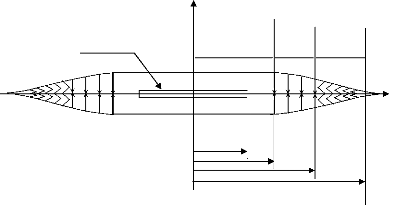
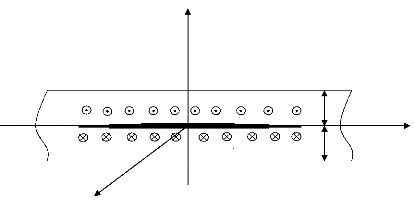
x2
1-(x1)
h
x1
-
1a
-
10
10
1a
x3
Figure 1.20. Le problème durant la phase
cohésive.

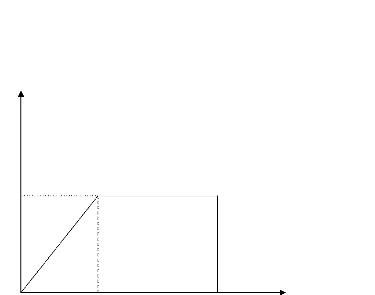
l0
si
x1
(1.1)
<
si
la
l0
< x1
34
Le chargement r(x1) est donné par
:
Le problème élastique constitué par les
équations d'équilibre et les conditions aux limites dans la phase
de propagation, est donné par le système suivant :
0
=
0
dansf2
A W
C
r.n=-r..
.n su
r1-2
r.n=rC
.n sur
FC
r23
= 0 surx2 = h
x2 --,-..
x
2
lim r13 = 0, lim r23 =
0
->--
srC = SII(D U F), F = F0 U FC
X MU [lC , la ) X M.
, l
0
F0 = (- X MU [4 jC)X{0}
~ ~
~~ ~ ~
~
~ ~
.
lC
l
l
(
=
FC
0
C
Avec :
(1.2)
(1.3)
Les loi gouvernant l'évolution des pointes
cohésives #177;lC et #177; la sont donnée
par :
k3(#177;la)= 0,
Le système d'équations (1.2) ainsi établie
est réduit à une équation intégrale
singulière, cette transformation se fait en appliquant les
transformations de fourrier standard.
L'équation intégrale singulière est
donnée par :
tia
r 1
L + k(x1,t)W(t).dt = 21t
r(x1 ),
t
x1
Il-
la
Avec : fv(t).dt = 0 (1.5bis)
-l
Ou la fonction k(x1,t) et donné par :
k (
2 (1.6)
t - x1
x1, t) =
4h2 + (t- x1) -la,-lC L'inconnue
u(t) est une fonction densité définie par :
w(t)= at [W(t,0+)- W(40)] (1.7)
A fin de résoudre l'équation intégrale on
doit introduire les quantités normalisées suivante :
x1
r= , s= ,
10 10
v(t) = f (s), k(x1,t) = L(r, , s), r
(x 1) = r(r) (1.8)
t
4
17 = 10

L'équation intégrale se réduit a :

1
r
(1.9)
1
+
1
1
71-
f[ s
1
r
Avec la condition
+ 1
ff (t).dt = 0 (1.10)
1
A cause des discontinuités dans la distribution des
chargements due au modèle de
DUGDALE-BARENBLATT, la méthode de
résolution standard ne donne pas de bon
résultat.
L'idée est de remplacer la fonction inconnue f (s)
par f (s) = h(s) +0(s) , où h(s) est la
solution de l'équation suivante :
1+1 f1
1 s -- r
2
ds = r(r),
il
h(s)
71-
1
r <1
(1.11)
Avec :
+ 1
f h(s)ds = 0. (1.1 1bis)
1
0(s) est solution de :

+
1
1
<1
r
s ds
f[s
( ) (r)
,
g
71-
r
1
1
+ 1 aL(r, s
)]0
(1.12)
Avec :
+ 1
1
g(r) = -- f1 aL(r, , s).h(s)ds 71-
(1.12 bis )
+ 1
(t)dt
0
f0
1
La méthode standard de résolution consiste à
exprimer 0(s) sous la forme0(s) = W(s)v(s) , ou
1
2)
(S )
(1
W = -s 2 sont les fonctions poids associés aux
polynômes de CHEBYSHEV du
+ 1 a .L(r , s)]. f (s).ds = 2 r(r),
il
premier ordre Tn (s) = cos(n.ar cos(s)) et
e(s) est une fonction continue et limitée sur
l'intervalle [--1,1] qui peut être exprimé avec une
série tronqué des polynômes de CHEBYSHEV du premier ordre.
Donc la solution ço(s) prend la forme suivant :
--
1 N
ço(s) = (1-- s2 ) 2 E A
nT n(s) (1.13)
n=0
On substitue ço(s) dans l'équation
intégrale et en utilisant les relations suivantes :
1
|
1
71-
|
--
iT n(s)(1 -- s2) 2 dt U n > 0
s -- r 0, n = 0
-- 1
|
(1.14)
|

Où : Un (r) = sin((n +1) arccos(s)) / 1--
s2 désigne les polynômes de CHEBYSHEV de
second ordre. L'équation intégrale se transforme en
un système de N équations a N inconnues appelées
A1,......... ...., A
·
N
·
|
N Er
AniU n--1(rj)+H nfr )
|
g (r
|
), j =1,......, N . (1.15)
|
n=1
Les r j sont les points de collocations donnée
par :
|
r j
|
= cos (2 j --1)71-)
2N
|
,j =1,......, N . (1.16)
|
Avec n(rHestj) donnée par :
1 1
(r j) =1 f (1-- s2 ) 2
laL(rj , s)Tn(s)ds
71-
--1

(1.17)
Ces intégrales sont évaluées
numériquement en utilisant la formule d'intégration de
GAUSSCHEBYSHEV suivante :

n
1 1 f (t)dtf (t k)
E
1t21
Tn (t k) = 0 (1.18)
Apres avoir obtenu les A. , il et facile d'évaluer le
facteur d'intensité des contraintes k3 aux pointes #177;
la et l'ouverture 8(r) le long des lèvres de la
fissure.
Les données du problème sont :
l0 = 1mm, h = 1mm, p = 1 100MPa,
'rc = 7 2 MPa.
--
Dans la phase cohésive, une zone cohésive
apparaît dés le début du chargement. Il est facile de
calculer 'ro. en supposons la connue, la loi
donnant 'ro. en fonction dela est k3
(la ) = 0,
en utilisant la linéarité du problème
élastique on a : k3 (la ) =
'roo.k3"(la)+ k3
(la) ou k3" (la) et
|
d'obtenir l'ouverture
|
[w
|
](la)
|
=
|
Sa
|
. Les quantités numériques calculées sont
représentées sur
|
37 4(la) sont respectivement le FIC du
problème sans forces cohésives et Too =1, et
le problème avec forces cohésives etToo = 0 .
L'équation k3 (la) = 0 donne T
=-ka(l a)
3 . Le calcul de la
k3 (la )
charge Too demande le calcul des FIC
k3oo (la) et k3 (la) . Les valeurs
calculées sont représentées sur la figure donnant la
relation entreToo et la (figure 1.21),
ainsi Too est une fonction strictement croissante de
la et tende vers Ta lorsque la tende
vers l'infini.
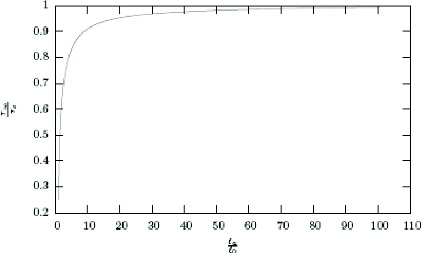
Figure 1.21 .Relation entre la charge appliqué et la
position de la zone cohésive dans
la phase cohésive.
La phase cohésive cesse lorsque l'ouverture en
x1 = #177;la dépasse la valeur critique
Sa. Pour déterminer la charge de rupture, pour la
longueur caractéristique Sa , la méthode
numérique utilisée est la suivante :
Pour la valeur test de la donné,
Too est obtenue en résolvant l'équation k3
= 0 avec la méthode
expliquée dans le paragraphe
précèdent, La valeur réelle de la et obtenu par
dichotomie afin
|
d'obtenir l'ouverture
|
[w
|
](la )
|
=
|
8a
|
. Ainsi on obtient finalement z8 en
fonction de la pour
|
un diagramme z,. - 8a (figure 1.22).
La charge de rupture est une fonction croissante de 8a .
On
|
note que la charge de rupture tend vers za
quand
|
8a tend vers l'infini. l0
|
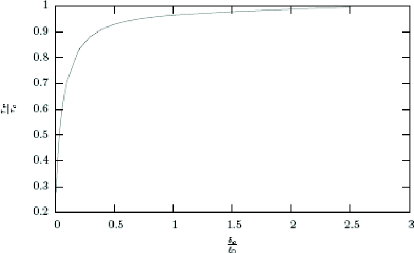
Figure 1.22. Dépendance de la charge de rupture et la
taille relative de défaut
initiale.
Pour prouver que z,. est vraiment la charge maximale
que le corps peut supporter tout en vérifiant les équations
d'équilibre et les critères de rupture, on impose la valeur de la
pointe non cohésive la , on calcule la valeur de la
chargez8 et de la pointe cohésive la en
résolvent le système d'équations non linéaires
(1.4). La méthode numérique utilisée est la suivante. Pour
la valeur test de la donnée, z8 est
obtenu en résolvant l'équation k3 = 0 avec la
méthode expliquée dans le paragraphe précèdent. La
valeur réelle de la et obtenu par dichotomie afin
charge limite de la structure fissuré. Les
résultats (figure 1.23) représentant la relation
entreô8 et la pour
äc de 0.1mm , la charge de rupture est de 0.71ô
,..
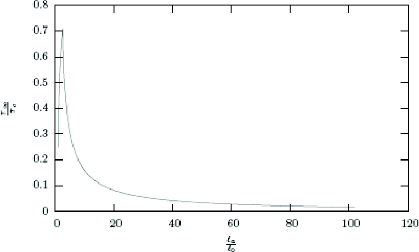
Figure 1.23. Relation entre la charge et la longueur de la
fissure pour äc = 0.1.
CHAPITRE 2
LE PROBLEME TRAITE
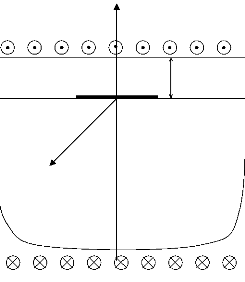
On considère une bande infinie SI = (--...,+.0)x (--h, h)
contenant un défaut de type fissure D
=[-l0,l0]x{0}de longueur 2l0 interne et
distant de h de la face supérieure et la face
inférieur de la bande. Le matériau constitutif de
la bande est élastique isotrope caractérisé par
un
module de cisaillement p . Les faces supérieurs et
inférieures sont soumises à une
contrainte de cisaillement anti-plan positive et uniforme
i-o. , augmentée a partir de 0. Les
lèvres de la fissure ne sont pas chargées (figure 2.1).

1-0.

h
la h x1
-
la
x3
Figure 2.1. Géométrie de la bande avec les
chargements.
Pour le présent problème, la seule composante non
nulle du vecteur déplacement, et la composante dans la direction
x3 , cette composante est indépendante de x3 .i.e
:
u1 = u2 = 0, u3 = W(x1, x2 ) (2.1)
Donc, le champ de contrainte correspondant est donnée par
:
0
=
211 = 222 =
233 = 212
(2.2)
?W ?W
, p
=
2 13
p
?x

1 ?x2
2
23
Le champ de déplacement W et les deux composantes non nul
du champ de contrainte 213 et 223
doivent satisfaire le système d'équation suivant :

~ÄW = 0,
~ ?W
213 ,
?x1
~223 = 0, ~
~223 =
~ ~223 = 2
D
Ù
D
dans
D
W
Ù
=
dans
D
223
D
?x2
sur
(2.3)
sur
x2 = h
sur
x2 = -h
L'initiation et la propagation de la fissure dans le corps suit
le modèle de DUGDALEBARENBLATT est caractérisé par les
paramètres suivant Gc , 2c et
äc .
U
Introduisons les nouvelle fonction inconnues W, 2U
définis par :

.x2
x2
W(x1 )
W(x1, )
x
2
+
2 8
p
(2.4)
)
?e2
?W
2-23 (x1, x2 = p
(2.5)
?x2

U
(x1, ) =
x2
213
?x
1
2 = +.(e2?e3 + e3
Ou les termes non nul de2U sont
'Le13 ,'Z'23 défini par :
~
~~ ~ ~
~ ~
|
|
42
|
|
dans sur sur sur
|
II / D
D
=
x2 h
x2 = -h
|
(2.6)
|
,
0
=
A W
,
r .n = -r .n
-
,
r23
,
r23
|
Dans la décomposition (2.4), le terme
|
r x2
. est associé à la solution du problème de
la bonde
|
Il
non fissuré sollicité par un champ de contrainte
uniforme de cisaillement anti-plan. Les
quantités inconnus W,i-13
et 'Le2 3 correspond a la solution du problème de la
bande fissuré. On
note que ce problème consiste à déterminer
la réponse de problème de la bande fissuré lorsque
les
contraintes de cisaillement - ron sont appliquées
sur les lèvres de la fissure. Les faces
supérieures et inférieures de la bande sont libres
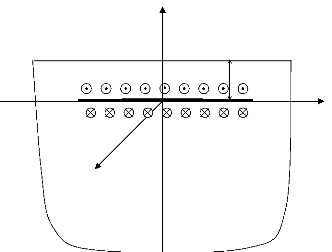
(figure 2.2).
x2

x3

-
la
la h x1
h
Figure 2.2. Géométrie de la bande avec les
chargements après la superposition.
,
Dans la suite on omet les symboles tildes, les champs W ,
rU soit notés respectivement
Pour des raisons de symétrie, on suppose que la fissure
se propage le long des axes x2 = 0 d'une façon
symétrique depuis les points (#177;l0,0) ainsi on note par F
la nouvelle fissure crée et par x2 = #177;la la position de
ses pointes, avec :
F = (-la ,-l0 ] x {0}U [l0 ,
la )x {0} (2.7)
L'évolution de la fissure suit la loi de
DUGDALE-BARENBLATT, en d'autre terme les pointes de la fissure (- la
,-l0 ) et (l0 , la) peuvent comporter deux
zones :
· La première zone, proche des pointes de la fissure
appelée la zone cohésive, et soumise a une force cohésive
de cisaillement constante d'intensité Tc .
· La seconde zone appelée non cohésive, et
proche de la fissure initiale sans forces cohésives.
Ces deux zones sont séparées par les pointes
x1 = #177;lc. Notons que, les valeurs de la
et
lc dépendent de la valeur de chargement
T.. sous l'hypothèse la = lc = l0
. Au début du chargement, on a les conditions initiales suivantes:
la = lc = l0 .
Dans le cas présent l'évolution de la
fissuration suit deux phases, la phase cohésive et la phase de
propagation. Les critères de l'initiation et la propagation de ces zones
sont étudiés dans les sections suivantes :
2.1 La phase cohésive :
Lorsque T.. ? 0. c a d 0 < T.. <
T, , T, est la charge de rupture, la fissure doit
apparaître (figure 2.3) d'une façon a ce que la contrainte de
cisaillement maximale dans le corps soit inférieur de la valeur critique
Tc . Par conséquent le FIC k3 en la
pointe de la fissure doit être
nul. Lorsque la charge est suffisamment proche du zéro,
la longueur de la fissure est
suffisamment petite de tel sort que l'ouverture
[if ] est partout inférieure à la valeur

critique äc. En conséquence,
toute les lèvres de la fissure crée sont soumise a une force
cohésive d'intensité Tc, et le champ de
déplacement ainsi que le champ de contrainte a l'équilibre sous
le chargement T.. sont donc solution du problème suivant :
x2

x3
=
A TV
II /(D U F)
D
=-2.0
2n
2n=2 a
=#177;
=
x2
223
~
~~ ~ ~
~ ~
dans
sur
sur
sur
0
n
n
0
F
F
h
(2.8)
x1
h
-
la
-
l0
l0
la
h
Figure 2.3. Géométrie de la bande avec les
chargements dans la phase cohésive.
Les pointes x1 = #177;la de la zone
cohésive avance est de façon a ce que la contrainte
223 ne dépasse jamais la valeur critique
2a dans la structure, cela oblige donc que les contraintes ne
soient pas singulières aux points x1 = #177;la de
l'axe x2 = 0 .
Par conséquent, la loi gouvernant l'évolution des
pointes #177; la de la fissure avec le chargement est k3
(#177;la ) = 0.
En d'autre terme, l'énergie total restitué G due a
la fissure cohésive crée doit être nul.
Cette phase cesse lorsque l'ouverture[-kt, ] aux points
x1 = #177;la dépasse la valeur critique
êa ceci
(2.9)
signifie qu'une fissure non cohésive doit
apparaître, la valeur du chargement correspondante est appelé la
charge de rupture, elle est défini par :

2r= sup{2 > 0 : [TV
](l0) <Val
2.2 La phase de propagation :
Si la charge est augmenté au-delà
deir , le corps ne peut pas trouver l'équilibre sans
qu'il y'a initiation et propagation d'une pointe non cohésive de la
fissure crée. Ainsi, la fissure F doit se diviser en deux partie une
partie cohésive Fa est une non cohésive F0.
On note par
la et la leur pointes respective (figure
2.4).
x2
x3
h
-
la -
la
-
l0
l0
la la
h
x1
Figure 2.4. Géométrie de la bande avec les
chargements dans la phase propagation.
(2.10)
On a donc :
Ù0 = Ù/( F),F
DU =F0 UFa
.
x {OU ya , la ) x {0l.
= (- x {0} U y0 , la ) x {0l.
,
l
0
l
a
F0
l
l
(
Fa
Le champ de déplacement w et de contrainte i ,
doit satisfaire les équations suivantes :
0
0
dans
A W
Ù
a
n
sur
in = ia
0
i23
sur
~
~~ ~ ~
~ ~
D U F
(2.11)
x2 =#177; h
Fa
in = -i8 n sur
Les lois gouvernants l'évolution des pointes #177;
le et #177; la sont donné par :
|
k3 (#177;la ) = 0,
|
[w
|
](#177;le)
|
=
|
äe
|
.
|
(2.12)
|
2.3 Conclusion :
Dans cette partie nous avons posé le problème
traité avec les conditions aux limites correspondantes. Dans le prochain
chapitre nous allons exploiter les équations d'équilibre et les
conditions aux limites pour établir l'équation
intégrale.
CHAPITRE 3
DERIVATION DE L'EQUATION INTEGRALE
3.1 Introduction :
Dans cette partie nous allons utiliser les équations
d'équilibre (2.11) établies dans le chapitre
précédant relativement à la phase de propagation et les
conditions aux limites correspondantes pour établir l'équation
intégrale, les équations d'équilibre sont
transformés a l'aide de la transformée de Fourier standard en une
équation intégrale suivant les travaux de ERDOGAN [18].
3.2 Les données de la transformation :
Pour obtenir l'équation intégrale pour le
système (2.11) on réécrit toutes les conditions
|
aux limites sur l'axe x2 = 0 et les bords
x1 = #177;h:
|
|
|
|
|
|
223 (x1 ,0+ ) =
223 (x1 ,0 - ) =
|
2(x1
|
),
|
x1 </a,
|
(3.1)
|
|
223 (x1 , h) = 223 (x1
,-h) =
|
0,
|
x1 <
|
+00,
|
(3.2)
|
|
223 (x1,0+) =223(x1, 0 ),
|
x1
|
> /a
|
|
(3.3)
|
|
w(x1,0+)=
w(x1,0-),
|
x1
|
> /a
|
|
(3.4)
|

le
si
xi
(3.5)
si
la
le
<xi
48
Ou :
r(xi)
~--r00 ,
= ~
~ --+rc,
Avec la relation de l'élasticité suivante :
aw(xi , x2)
r23 = (3.6)
ax2
Appliquant la transformée de fourrier sur la solution du
problème. La transformé de fourrier est définis comme suit
:
Sous forme paramétrique :
Soit une fonction a deux variables f (xi ,
x2) , on prend x2 comme paramètre, la
transformé de fourrier est donné par :
+00
|
U
f (2, x
|
2) = ff(xi,x2).e--axi .
|
dx1 (3.7)
|
--00
Ou bien, en considérons les deux variables : Soit une
fonction h(xi , x2) :
+00+00
= f fh(xi , x2 ).e-i.(2.xi +e.x2)
.dx1.dx2.
(3.8)
--00-- 00
La transformé de fourrier inverse :
2
= f7(2 d2 p --00
f(xi,x2)
1

(3.9)
L'équilibre est donné par l'équation
suivante :
Aw = 0 (3.10)
a 2
w+ a2w = 0 (3.10 bis)
2 2
axax
; 2
+00
a 2 --w(2, x, ) ;2
-- 22 f w(2, x2 d. ax
1,+ f d2 = 0
«
2
+00 +00
--00 --00
(3.12)
(a2w(2, x2
22w(2, x2 = 0
ax;
--00
(3.13)
+00
f
a 2 1 +00 a 2 1
(3.11)
2 ( fw(2, x2
).Ciasi d2) + 2 ( fw(2,
x2 ).Ci2si d2) = 0
ax 271---00 ax2 271---00
|
2
W(2, x2) 22
2, 0
W(x2)
|
49
(3.14)
|
|
axe
|
|
Sous la forme :
|
|
|
f cents- 22 .f =0
|
(3.15)
|
|
L'équation caractéristique donne :
|
|
|
n 2 -22 = 0, = 1.2
|
(3.16)
|
|
n 1 = - 2n, 2 = 2
|
(3.17)
|
|
La solution est de la forme suivante :
|
|
|
W(2, x2) = C1
(2).e"2 + C2 (2).en2.x2
|
(3.18)
|
En appliquant la transformé de fourrier inverse sur la
solution on obtient les différentes expressions pour la solution au
dessus et au dessous de la fissure :
+00
w(x1,x2) = 27/- f(C1
(2).en1.x2 + C2 (2).en2.x2
.d2, 0 < x2 < h (3.19)
-00
1 +00
w(x1,x2)= 27/-
f(C3(2).e"2
+C4(2).en2s2).e-L2s1 - h
< x2 < 0 (3.20)
-00
Ou C k (2) , (k =1,.......,4) sont les
fonctions inconnues de la variable 2 déterminées en
utilisant les conditions aux limites (3.1) et (3.2), et n1,
n2 sont les racines du polynôme caractéristique
relative a l'opérateur A, ils sont données par :
|
n2 - 22 = 0,
|
n1=
|
2,
|
n2
|
= -
|
2
|
|
(3.21)
|
De l'équation (3.2) (3.3) et (3.20) il est facile de
trouver :
C 1 e 2.h .h
-C2.e-= 0 (3.22)


C3.e-2.h C
4.e2.h =0
(3.23)


Pour réduire le problème à une
équation intégrale, on introduit la fonction densité
suivante :
d
W(x1) =
dx[w(x1,0+)-w(x1,0-)1
(3.24)
fv(t).dt = 0, v(x1) = 0 Pour (3.25)
En substituent les équations (3.19) (3.20) dans (3.4), on
obtient :
W(x) =211-
fi2(C1+ C2 -- C3 --
00
En prenant la transformée de fourrier inverse, on obtient
:
1o
i.2.(C1 + C2 -- C3 --
C4) = .dt
1o
.dt (3. 26)
C1 + C2 -- C3 -- C4
= 2. fv(t).ei.2.t
o
1
Notons le second membre de (3.26) par F :
+1
F =ifvf(t).ei.2.t .dt
(3. 27)
De l'égalité (3.3) :
1-23 (x1 , )
2.x2 -- e 2.x2 ).e--i.a.x1
x2 > 0


2.
.
+00
e
.
(C1
Dr
00 +00
1-23 (x1, x ) = . f(C 2 --
.x2).e--i.2.x1
j2el" e 4
00
|
x2 < 0
|
+00 +00
2
. 2. f(C1--C2 ).e--i.2.x1
.d2= . . f(C3 -- C4
).e--i.a.x1 .d2
Dr


--00 --00
C1--C2--C3+C4=0 (3.28)
Pour trouver les valeurs des C k ,(k =1,........,4).
il suffit de résoudre le système d'équations
algébriques suivants :
.e
C3 .e--2.h
C4e
.
+
C2- C3
C2 - C3 + C4

0


.h
.h
2
0
C2
.e
2

.h
2
0
- C4 = F
(3. 29)
51
Nous avons trouvé :
.
h
F.e
h
.h +e .
.
h
1
F.e
.
+e
- C2 =1
- .h
2. - e
.
h
F.e
C4
F.e
.
h
1
-
.
=
.
h
-
2 e
.h +e .
.
. ,
-
h
h
.
+e
2 e
=
=
C 1
C3
.
2 e
1
(3.40)
Substituant les constantes C3 et C4 dans
l'équation suivante :
9
(x1,0- )=x2 W( = 1-(x1 )
axX1 X22
1-23
On obtient :
4,r
=
d
t ( )
x 1
m
- (h+x2)
(e - e
- h +e h )e
2
e
+00
0
x2
lim
IF
- 00
On substituent F de l'équation (3.27) et en changent
l'ordre d'intégration:
lo +00 e (h+x2) - e- (h+x2)
f(x2lim0- f - h h )ei (t-x1)
camodt = - 1-(x1e + e m
- l -00
o
Mettons l'équation sous la forme suivante :
l of k(x1,t).v(t).dt =-4
.1-(x) (3. 41)
m-l o
Avec :
)
+00 e .(h+ x2) - e- .(h+x2) -
k(x1 ,t)= x2lim 0- fi. .(
- .h h
e +e



-00
. d (3. 42)
Notons par (x1Hla, ) partie sous le signe
d'intégration dans l'équation précédente :

)
+x2
.
h
.
(x2, ) --
--h - .
e + e
.(h+x2) - .(h-e
e
h+x
(3.43)
(x2, ) = -H(x2,- )
L'intégrale (3,43) devient :
|
k(Xi , t On sait que :
|
)
|
+ - - -
ea...(h+X2) - e-2.(h+X2) e e
i t X i t X
=2.( -2.h 2.h ).( ).d.1.
(3.22.44)
X2m0- 2
e + e i
0
|

-
i.X
ei.X - e
X
=
i
sin(
)
2.
D'où :
+2(h+X2) -2.(h+X2)
). sin 2.(t - X).d2 (3.23.45)
6
k(Xi,t)= X2lim0- - 2 f.( e 2.h
0
e + e
k(Xi,t) Se réduit a :
+-2.(h+X2) +
(3.24.46)
k(X
1,0= Xlim0-(-2 f(ea.X
e 2 e
0
-.1. h h.sin(2.(t-X1))).d2
· + e2
·
)
L'équation intégrale devient :
~ ~fk' (Xi,t).v(t).dt
=2.n- . ( ) .(3.25.47)
m-~ ~
Avec
+ -e
h+X2) + e-2.(h-X2
k (X,t)=X lim ( . f(ea X2
0
e
2 +e
l .(
0
|
)
|
).sin(2.(t - Xi))).
|
dit (3.26.48)
|
Le premier terme donne :
+X2 lim 0- fea.X2
.sin(.1(t -X))4.1. = 1
(3.27.49)

t - X1
Notons par I la partie suivante :
|
1= lim
2
|
+-2.(h+X2)+ e -2.(h-X2)
2e-.1h0-( f( e
-a.h + e a.h ). sin(2.(t e + e
)))d2 = sin(2(t - ))
00
|
dit (3.28.50)
|
+00
0
Finalement, l'équation intégrale s'écrit
:
1o
f
) (3.29.51)
( 1 + k" (x1,t))v(t)dt
=271- «x1

Il
t-x1
1o
Avec : fvf(t)dt = 0
-1 o
2h
2e-
k" (x1, t) =-f -tee », sin(2(t
- x1 ))dt e +e
3.3 Démonstration de la convergence uniforme de
l'intégrale I :
Le critère de convergence uniforme d'une intégrale
impropre s'énonce comme suit : S'il
00
existe une fonction continue M(t) telle que
00
ff (x, t).dt est uniformément convergente.
0
Soit la fonction e-2h :
f (x,t ) M(t) et fM (t).dt est convergente, donc
0
7.
j Cal 1
d2=-1
0
h
r -2h-1-- 1
(3.30.52)
h
Le 10 =
Cette intégrale est bien convergente. Allons prouver que
:

-e 2 h
(h+x2)e-
+e
+e-(h-x2)
ah
<e
-2h
(3.31.53)
La fonction sinus est une fonction bornée dans
l'intervalle[-1.1], (3.53) est donc vérifié si :
e 2-2(h+x2) + e - (h-x2)
e -Âh + e.1h
)
1
<
2h
2
+
1
e
e2+ e2-2,(h - (h-x2
(3.32.54)
-1 o
sin(2(t - x1)
Nous allons prouver que la fonction en valeur absolue est
inférieur ou égale a 1. On considère 2 comme
paramètre sachant que 2> 0 .
)
f (2, x 2
e
-2.1h +1
Notons par f et g respectivement le numérateur et le
dénominateur de la fonction en valeur absolue définie
précédemment.
f(2, x2) = e-2(h+x2) +
e-2(h-x2) (3.33.55)
g(2) = e-22
Nous avons comme données :
2>0,x2e [-h,0],h> 0 (3.34.56)
Pour la fonction f (2, x2) :
La dérivée par rapport a x2 :
af (2, x2) =
ile-2h (e2x2 - e-2.2)
(3.35.57)
ax2
La dérivée est strictement négative V
(2 > 0, x2 E [- h,0 ]) ,
La variation de la fonction f (2, x2) est
présentée sur le tableau suivant :
h
2e-
|
Il est donc claire que :
|
|
|
f(2,x2) g(x) Vx2
|
|
|
Et donc
|
|
|
f (2, x2 )
|
£ 1
|
(3.36.58)
|
|
g (2)
|
|
En conclusion, l'intégrale I est bien uniformément
convergente.
|
|
3.4 Conclusion :
L'équation intégrale ainsi établie, nous
allons procéder dans le chapitre suivant à la résolution
de cette équation en utilisant une méthode numérique
basée sur les polynômes de CHEBYSHEV.
CHAPITRE 4
RESOLUTION DE L'EQUATION INTEGRALE
4.1 Introduction :
Dans cette partie nous allons procéder à la
résolution de l'équation intégrale établie dans le
chapitre précédent. Pour alléger les écritures on
note park le terme k" de l'équation intégrale.
4.2 Résolution :
L'équation intégrale s'écrit :
1 1
+k(x1,t)W(t).dt =
2.11-1"(x1
t x
- m
-1 1
Avec la condition :
1
fv (t)dt = 0
- 1
Avec :
+
k
, (4.2)
.02.e-a.11
0
(x1,t)= f e +e2.11.sin
2.(t- )42.
4.2.1 Introduction des quantités normalisées
:
Tout d'abord, nous introduisons les quantités
normalisées suivantes :
t

x1
r= , s = ,
la
la
=
le Kt) = f (s), k (x 1 , t) = L(r, s),
1-(x1) = 1-(r) . (4.3)
l, a
Ainsi l'équation (4.1) prend la forme suivante :
1
+
1
J[
s
1
71-
-
r < 1. (4.4)
1 2
+ l a .L(r , s)].f (s).ds = .r(r),
--r
Il
Avec la condition :
+1
Jf(t).dt = 0 (4.5)
-1
Dans (4.4), le chargement 1-(r) est donné par
:
~ - 1- ,
~ ~--1-...+1-e,
77
(4.6)
1-(r)
si r <
si 17
<r
<1
On remarque que le chargement (4.6) présente des
discontinuités. Pour ce type de chargement, la méthode de
résolution de ce type d'équation intégrale ne donne pas de
bons résultats. Par conséquent, et suivant une méthode
développé par (IOAKIMIDIS, 1980 [32]), on remplace f (s) par une
nouvelle fonction 0(s) telle que :
f (s) = h(s) + 0(s), (4.7)
Où h(s) est la solution de l'équation
intégrale suivante :
|
1
|
+1
J
-1
|
1
|
.h(s).
|
ds = 2 .r(r),
|
r <1. (4.8)
|
|
|
|
71-
|
s -- r
|
|
Il
|
|
Avec la condition supplémentaire suivante :
+ 1
J h(s).ds = 0 (4.9)
-
1

<1
r
Où
+ l aL(r, s
(4.10)
s ds
)]0 ( ). (r),
g
1
+
1
1
-
71-
1[s
1
r
-
1
+
1
1
g (r) = -
71- fl a .L(r ,s).h(s).ds
(4.11)
Avec la condition
+1
10(t).dt = 0 (4.12)
-1
Il est clair a partir de l'équation (4.11) que, puisque
L(r ,s) a un comportement régulier, ceci
est également vrai
pour g(r) , et les techniques numériques classiques pour la
résolution de
l'équation intégrale singulière peut
être directement appliqué pour résoudre l'équation
(4.10) sans aucune modifications.
La solution de l'équation (4.8) et (4.9), est
donnée par [28] :
2 (r)
h(s) =-.(1-s2 )
2.1(1-r2 ) 2. r dr
71-./.i-1 r - s
1 +1 1
s <1, (4.13)
On obtient :
Où
h(s) = h1 (s) + h2 (s)(4.14)
2.s
h1 = . (1-s2 ) - 2.(-2
.71- + 2.rc . arccosil), (4.15)
/ni./

2
1
-
1
il
2
s -s
2
il
2
1
-
1
s
+s
il
il
h2(s) = 2r c ln
71-izi
(4.16)
On voit que h2 (s) présents des
singularités logarithmiques aux points s #177;il.
4.2.2 Application de la méthode de résolution
standard des équations intégrales :
Il a été montré dans (ERDOGAN et al. 1973
[18]) que l'équation intégrale singulière (4.10) a
l'indice 1 car la fonction inconnue 0(s) à des
singularités intégrables aux points #177;1.
1
-
poids associé au polynôme de CHEBYSHEV de premier
ordre
T n(s) = cos(n.arccos(s)) et ço(s)
est une fonction continue et bornée sur l'intervalle [-1, 1]
laquelle peut être exprimé comme une série
tronquée des polynômes de CHEBYSHEV du premier ordre. A cause de
la symétrie du position par rapport à x2 on
à ço(s) = --ç(s) . Donc, la solution de
l'équation (4.10) s'exprime :
1 N
--
0(s) = (1-- s2) 2 EAn.T 2n--1(s) (4.17)
n=1
Substituons l'équation (4.17) dans l'équation
(4.10) en utilisant les relations suivantes :

|
1
|
|
|
|
|
Avec
|
--
1 1T n(s)(1 -- s2) 2 CIs
n> 0 =
s -- r --1 0, n=0
|
(4.18)
|
|
|
|
|
|
Un(r)= sin((n +1).arccos(r))/ 1-- r2
(4.19)
L'équation (4.19) design les polynômes de CHEBYSHEV
de second ordre. On trouve :
N
E An [U 2,2 0+ H n(r)]= g(r), r <1.
(4.20)
n=1
Ou:
1 1
(r) = 11(1-- s2) 21.1(r,
sg2n--1(s)CIs p
n
--1
(4.21)
L'équation (4.20) peut être résolue en
sélectionnons les N points de collocation données par :
|
rj = cos
|
~(2 j --1)/z
2(2N--1)
J , j,......,N. (4.22)
|
Utilisant les points de collocation donnés par
l'équation (4.22) dans l'équation (4.20) on arrive a un
système de N équations a N inconnus, nommés
A1,........, AN laquelle peut être
exprimé ainsi :
N
E A n[U 2n--2(rj)+H n(rj)]= g(r ), j =
1,........., N (4.23)
n=1
4.2.3 Évaluation numérique des
différentes intégrales :
Les intégrales H (r i) et g(ri) sont
évaluées en utilisant la formule d'intégration de
GAUSS-CHEBYSHEV qui s'écrit :

1 f (t)dt f (tk)
f2 ~
» ,
1
t --
1
1
-
p
7 (t k) = 0 (4.24)
La valeur de g(ri) du coté droite de
l'équation (4.23) est déterminée à partir de
l'équation (4.11) laquelle grâce à l'équation (4.14)
peut se mettre sous la forme suivante :
|
1 1
1g(r) = -- [f l aL(r,s)h1(s)ds
+ f laL(r,s)h2(s)dsj
|
(4.25)
|
La première partie est évaluée par la
précédente formule de GAUSS-CHEBYSHEV. A cause des
singularités logarithmiques que présente le terme h2
(s) aux points #177;77 , la seconde partie est devisée sous la
forme suivante :
1 --77 77
1
faL(r, s)h2 (s)ds = f laL(r,
s)h2 (s)ds + f laL(r,s)h2(s)ds + f
laL(r,s)h2(s)ds (4.25 bis)
1
--
1 --77 77
Chacun des intégrales du membre droit de l'équation
précédente est évaluée à l'aide de
GAUSS-CHEBYSHEV.
4.2.4 Evaluation numérique de L(r, s) :
Considérons maintenant le terme L(r,s)de l'équation
(4.10), après introduction des entités normalisées :
+c
.e
L(r, s) =e + e Âji . sin la
.2.(s --
2

0
(4.26)
--
Âh
AL(r,s) =
l .2.(s -- r d2.
a
(26 bis)
sin
)
·
f 2.e 2 e--
J --2 h 2 h
·
. sin la .2. (s--r).d.l + f
. '
·h
--2.h 2
e + e . e + e
0
A
Ou A est un point de coupure, La deuxième intégrale
du membre droit de l'équation précédente devient
négligeable pour une valeur de A suffisamment grande.
- Evaluation de A :
On considère la plus grande valeur de$ -- r = 2, pour
l'instant on prend la =10 .
L'évaluation numérique de l'intégrale
à l'aide du logiciel MAPLE avec la fonction (evalf) avait donné
:

)
=
0.05.
(4.27)
+00
(1e _2.h.e + e a.h .sin
20.2.la.d2
2
2.
h
evalf
-
0
Si on limite l'intégration sur l'intervalle [0.6] on
obtient une bonne convergence :
6r 2.e_a.h
evalf (f 21a (r -- t).d2)=
-a.h a h
e + e.
0
0.04999946939. (4.28)
En conclusion on peut limiter l'intégration sur
l'intervalle [0.6] et l'intégrale L(r, $) prend la forme suivante :
L(r,$) =e-2.h sin 21 afr --
t).d2.
+ e a.h
6

0
(4.29)
L'intégrale ainsi définie est évaluée
à l'aide de la formule de GAUSS-CHEBYSHEV avec un changement de variable
pour passer de l'intervalle [0.6] à l'intervalle[-1,1].
A
-1 2 2 A
(4.30)
A
(2+1).h
L(r,$) = A e A . sin (2+
1).la(r --t).d2.
2 - (2+1).h (2+1).h 2
1 e 2 + e 2
Avec : A = 6.
A l'aide de la méthode d'intégration de
GAUSS-CHEBYSHEV nous avons évalué numériquement
l'intégrale L(r,$), la est pris égale a10, le nombre
de points pour lequel il y'a
convergence de l'intégrale et n = 250. La valeur de
la =10 est choisi comme une valeur
limite au delà de laquelle la convergence ne peut
être attente qu'on augmentent n , ceci augmente sensiblement le temps
d'exécution des programmes relatives aux phases cohésive et
propagation (dans lesquels le programme est incorporé) et demande des
machines de calcul puissantes.
Pour une plage de valeurs de 2 on trace les deux
graphes dans les figures (4.3, 4.4) suivants :
0.08
0.07
0.06
L
0.05
0.04
0.03
0.02
0.01
62
0.08
0.07
0.06
L
0.05
0.04
0.03
0.02
0.01
0 10 20 30 40 50 60 70 80 90 100 110
A
Figure 4.3 : valeur de L(r, s) en fonction de A .
0 5 10 15 20 25 30 35
A
Figure 4.4. Agrandissement.
Il est clair que l'intégrale L(r, s) tend vers la
valeur de 0.5 même à partir de la valeur A = 6 . Ce
résultat a été prouvé avant par l'évaluation
de la même intégrale par le logiciel MAPLE, à l'aide de la
fonction (evalf) on retrouve la même valeur.
4.3 Formule donnant le facteur d'intensité de
contrainte :
Le facteur d'intensité de contrainte en pointe de fissure
est donné par :

) (4.31)
(#177;la ) = du lim la2 --
X2 yi(X ) = -- du la lim 1--
s2 f (s
k3 1, , x #177;la 1 1
2 s #177;1
z ta

s
f
2
2
n
1 x
1
-
Tn (x)dx 1
= Un 1(s) 1-- s
(4.35)
Où v(x1) est donnée avec (3.24)
. On obtient :
N
2
k3 (#177;la) = lat_--
rc arccos(q) -- '2 An)
(4.32)
ir
4.4 Formule donnant l'ouverture de la fissure :
L'ouverture de la fissure en x1 E [-1,1] est
définie par :
1
8(x1)=w(x1,0+)--w(x1,0)=
I' lv(t)dt (4.33)
De (4.3), (4.7), (4.14) et (4.17) on obtient :


JI
~r 1_172 --17 1--r2
b-r2 + 1-172r _2arccos 1

8(r)= 2a et: 1 r2
+tc[rln
it-u r 1-172 +17
1--r2 r2 --
-- +17ln


172 0 -- r2

N A U i(r)
'
--la 1--r2E (4.34)
n=1 n
Pour obtenir (4.29), on a utilisé les relations suivantes
:
On observe à partir de l'équation (4.29),
que 8(r) n'est pas définie en #177;ç , a cause
des singularités logarithmiques. L'ouverture de la fissure en ces points
et obtenue en passant a la limite de 8(r) lorsque r ?
#177;ç.
On obtient les résultats suivants :

la
1
~l
a
~ ~
~ l a ~
J ô8 Ir JJ W:Jj
lala
2
ôalaarcco2ôa
2
la
la
la
11(
2la
la
1
-
)
8(#177;
Ir
la
Iru
~la
2 4u2n- la )
2
N
n=1
2n -1
4.36
4.5 Etude de convergence :
Nous avons étudié la convergence utilisant les
programmes relatifs aux différentes phases de développement de la
fissure pour déterminer les valeurs de N et n pour lesquelles il y'a
convergence. Pour déterminer l'une il faut fixer l'autre.
On commence par N , on prend n =100. On considère la
valeur du facteur d'intensité de contrainte K3 , la figure
4.5 montre qu'a partir de N = 30 K3 converge.
-20
|
-25 -30 -35 -40
k3
-45 -50 -55 -60 -65
|
|
-70
0 10 20 30 40 50 60 70
N
On considère maintenant n, avec N = 30 on obtient les
valeurs de facteur d'intensité de contrainte k3 en fonction
de n (figure 4.6). Il est clair que pour n =100 il y'a convergence.
|
0 -10 -20 -30 -40
k3 -50 -60 -70 -80 -90 -100
|
|
|
|
0 20 40 60 80 100 120 140 160 180 200
|
n
|
Figure 4.6.Valeur de facture d'intensité de contrainte
k3 en fonction de n.
Par conséquent, dans tout ce qui suit les calculs sont
effectuées avec N=30 et n=100.
=
=
Il
213
, 223
ax2
1
a W a W
Il
ax
(4.38)
4.6 Etude du cas de fissure dans un milieu infinie :
Dans ce paragraphe on considère le cas d'un plan infini S2
= (-00,+00)x (-00,+00) , contenant une fissure D
=[-10,10]x{0} centrale de longueur 210 . Le
matériau est élastique isotrope caractérisé par un
module de cisaillement Il . Les faces supérieure et
inférieure sont soumises à une contrainte de cisaillement
anti-plan positive et uniforme 200, augmenté a
partir de 0. Les lèvres ne sont pas chargées (figure 4.7).
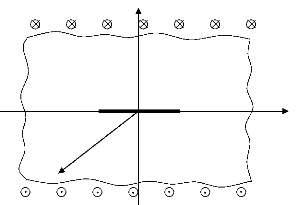
200
x2
x1
- 10 10
200
x3
Figure (4.7). Fissure dans un milieu infini.
Apres la superposition on considère que le problème
fissuré avec fissure chargé. Le modèle de fissure est le
modèle de DUGDALE.
4.6.1 Equation intégrale :
La seule composante non nulle du vecteur déplacement, et
la composante dans la direction x3, cette composante est
indépendante de x3 .i.e :
U1 = U2 = 0, U3 = W(x1, x2) (4.37)
Donc, le champ de contrainte correspondant est donnée par
:
|
211
|
= 222 = 233 =
|
212
|
=
|
0
|
On note que ce problème consiste à
déterminer la réponse de problème de la bande
fissuré lorsque les contraintes de cisaillement -- rcon sont
appliquées sur les lèvres de la fissure. Les faces
supérieures et inférieures de la bande sont libres.
Ainsi le champ de déplacement W et les deux composantes
non nul du champ de contrainte r13 et
r23 doivent satisfaire le système d'équation suivant
:
~AW = 0 ~~r.n = --r .n
co
~r23 = 0 ~ ~r23 = 0
dans II/ D
sur D (4.39)
sur x2 = 1-co
sur x2 = -co
En suivant les mêmes étapes que dans le chapitre 2
on arrive à l'équation intégrale suivante :
1
f
Il
-
1
ço(t) .dt = r(x)
x -- t
(4.40)
Le terme r(x) est la charge si on considère le
modèle de DUGDALE donné par :

<
si
1c
x1
r(x1)
<
si
1a
1c
< x1
~--r co , = ~
~--rco-Frc,
(4.41)
4.6.2 Phase cohésive :
La zone cohésive apparaît et se développe
dés que rco > 0 . Le critère gouvernant la
propagation de la pointe de la fissure 1a est k3 = 0 .
C'est une équation implicite relient
rco et 1a . La relation qui donné le
facteur d'intensité de contrainte pour le présent problème
et donné par :
k3

2
)) (4.42)
(#177;1a ) = 1a (rco-- r
aar cos(1 0
Ir 1a
La phase cohésive est caractérisé par un
facteur d'intensité de contrainte nul au pointe cohésives
1a .
(
r
co -- 2
r
a
ar
cos(1 0 )) =
1 a
Ir 1a
0 (4.43)

k3 (#177;1 a) = 0
Donc on arrive à la relation suivante qui donne
l'évolution de la longueur 1a en fonction du chargement a
8c fixe dans la phase propagation :
rco = 2 r aar cos(10 )
(4.44)
Ir 1 a
4.6.3 Contrainte de rupture :
La phase cohésive cesse lorsque l'ouverture aux points
x1 = #177;la dépasse la valeur critique
8a .
Elle est caractérisée par les deux relations
suivantes :
k3 (#177;la) = 0 ,
8(#177;la) = 8a (4.45)
On note que l'ouverture est donnée par la relation
suivante :
Ir
8(#177;la) = - Tal0Ln(cos r
T ) (4.46)
2
4Iru
T


a
Donc :
8a =-
T
al0Ln
Iru
4 Ir TT
(cos
2T
)
)
Ir TT
cos(
2 Ta
= exp(- 8° c l) (4.47)

0
4Ta
La charge de rupture est donnée par la relation suivante
en fonction de 8a :
Ir
8irp
TT =2Ta aT
cos(exp(-
4a )) (4.48)
0
Ta


4.6.4 Phase de propagation :
Nous allons prouver que TT est
réellement la charge maximum que la structure peut
supporter tout en vérifiant l'équilibre et les
critères relatifs à la théorie de rupture. La
méthode la suivante :
On considère les relations suivantes :
[w]=8a (4.49)
On augmente la charge jusqu'à ce que T
=TT
Sachant qu'au deux points la et la :

)) = 0
k3 (la) = 0 (4.50)
(
T
8- 2
T
c
aT
cos(l
a
la
Ir la
)

2
Ta
la= IrT8
cos(
la
(4.51)
À la pointe la on a :
))
[w(la) ]= 8a (4.52)
2
8 = (-2r l Ln
a c c
4
Iru la
(la
))
8a=-
TalaLn(cos(ler8
Iru
Ta
2
11-2
8c = 4rcl a
cos(le r" )Ln(cos( " ))
(4.53)

Irc Irc
gIi
la
iz-8
Ii
Donc on arrive à la relation suivante qui donne
l'évolution de la longueur la en fonction du chargement a
8c fixe dans la phase propagation :
_
(4.54)
c
gr

gr"
"
4rc cos(Ln
Irc Irc
)
4.7 Conclusion :
))
(cos(
(cos( Dans le chapitre suivant nous allons présenter
les résultats du problème de la bande fissuré relativement
aux phases propagation et rupture pour plusieurs valeur de l'épaisseur h
de la bande, ainsi que les résultats du problème du milieu infini
fissuré. Nous allons voir que lorsque on augmente l'épaisseur les
résultat tendent vers s'eux du problème de milieu infini
fissuré.
CHAPITRE 5
PRESENTATION DES RESULTATS
5.1 Introduction :
Nous présentons dans ce chapitre, la méthode
numérique utilisée pour chaque phase. Nous présentons
également les résultats obtenus pour plusieurs valeurs de
l'épaisseur h données ainsi que les résultats pour le
problème du milieu infini fissuré pour faire une confrontation
des résultats, les caractéristiques mécanique et
géométriques du problème ont été
fixées aux valeurs suivantes :
l0 = 1mm, h =1mm, u =1100 MPa ,
rc= 72MPa (5.1)
5.2 La phase cohésive :
La zone cohésive apparaît et se développe
dés que ro. >0 . Le critère gouvernant la
propagation de la pointe de la fissure la est k3 = 0.
C'est une équation implicite relient ro. et la .
D'un point de vue pratique, il est facile de calculer ro.
en supposons la connue.
Effectivement, en utilisant la linéarité de
problème élastique, le Facteur d'intensité de contrainte
k3 (la) est donné par la formule suivante :
k3 (la) = r o.k ç
(la) + 4 (la) (5.2)
Ou k3oo (la) et k3(la
) sont respectivement le FIC de problème sans forces cohésives et
avec Too=1, et le problème avec forces
cohésives et Too = 0 . L'équation k3
(la) = 0 donne :
c
k3 l
Too = ( a) (5.3)
k7(la)
Spécifiquement, pour la valeur donné de
la on détermine la charge Too avec la
formule (5.3), les Facteurs d'intensités des contraintes
k3oo(la ) et k3 (la) sont
calculés avec la formule (4.32) avec lc =l0. Les
valeurs calculées sont représentées sur un diagramme
Too - la (figure 5.1). Pour plusieurs valeurs de
l'épaisseur h on vois ainsi que Too est une fonction
strictement croissante de la et qui tend vers Tc
quandla tends vers l'infini.
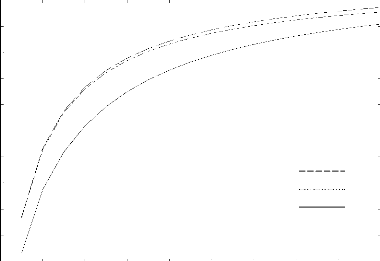
h inf
h= 10
h= 01
|
0.95 0.9 0.85 0.8 0.75
Too
Tc 0.7
0.65 0.6 0.55 0.5 0.45
|
1 2 3 4 5L 6 7 8 9 10
La
L0
5.3 La charge de rupture :
La phase cohésive cesse lorsque l'ouverture aux points
x1 = #177;1a dépasse la valeur critique
8a . Pour déterminer la charge de rupture pour la
longueur caractéristique 8a donnée, la
méthode numérique utilisée est la suivante :
)
=
8a
. Les
Pour la valeur test de 1a , T8
est obtenu par dichotomie en considérant [[4]](10
quantités numériques calculées sont
présentées sur un diagramme T,.-8a
(figure 5.2).
Comme attendu, pour plusieurs valeurs de l'épaisseur h la
charge de rupture et une
fonction croissante de 8a . On note que la
charge de rupture tend vers Ta lorsque
8a tend vers
10

|
T,.
|
1 0.9 0.8 0.7
|
|
|
|
Ta
|
0.6 0.5 0.4
0.3 0.2
|
l'infini.
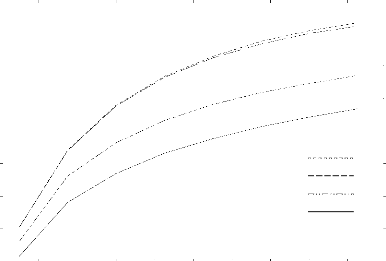
h=0.1
h inf
h= 10
h= 01
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
8a
10
Figure 5.2. Dépendance de la charge de rupture avec la
taille relative de la fissure initiale.
5.4 Phase de propagation :
la valeur de la pointe non cohésive la et on
calcule la valeur de la charge ô8 et celle de la
pointe cohésive la en résolvant le système
d'équation non linéaire suivant :
|
k3
|
(#177;la)
|
=
|
0,
|
[[wl(
|
#177;la)
|
=
|
8a
|
(5.4)
|
La méthode numérique utilisée est la
suivante. Pour une valeur test de la donnée,
ô8 est obtenu en résolvant l'équation
k3 = 0 avec la méthode expliquée ci-dessus. La bonne
valeur de la est obtenue par dichotomie de telle sorte que
=
.
8a
[[wl(
#177;la)
Nous présentons sur la figure 5.3 pour plusieurs valeurs
de l'épaisseur h l'évolution de la charge appliquée
ô8 en fonction de la pointe la.
|
0.9
0.8
0.7
0.6
ô8 0.5
ôa
0.4
0.3
0.2
0.1
0
|
Il s'avère qu'après la phase cohésive
ô8 est une fonction décroissante de la,
ceci prouve que ô, est une charge limite et donc la charge de
rupture de la bande fissuré, pour 8a ? 0.1 , la
charge de rupture est égale à0.8ôa .
h= 0.1
h inf
h= 10
h= 01
1 2 3 4 5 6 l 7 8 9 10 11
a
l0
Figure 5.3. Relation entre la charge et la longueur de la fissure
pour 80 = 0.1.
CONCLUSION
Nous avons présenté dans le chapitre
précèdent les résultats obtenu relativement au
différentes phases de propagation de la fissure pour le problème
de milieu infini fissuré auquel nous avons affecté le signe h
inf dans les figure (5.1), (5.2), et (5.3), nous avons
représentés sur les même figures les résultats
obtenus pour le problème de la bande, il est clair que lorsqu'on
augmente la valeur de l'épaisseur h de la bande les
résultats obtenus approchent les valeurs relative au problème du
milieu infinis fissuré. Ceci est évident de point de vue
géométrique puisque lorsqu'on augmente l'épaisseur
jusqu'à l'infini le problème de la bande fissuré devient
identique au problème du milieu infini.
A partir des résultats obtenus dans le chapitre
précédent on observe que plus le défaut et petit, la
longueur de référence qui est une longueur caractéristique
introduite dans le modèle de Dugdale, plus la charge limite s'approche
de la contrainte critique du matériau. En d'autres termes, ceci semble
indiquer que le défaut de petite taille a pratiquement peu d'influence
sur les capacités de résistance de la structure si on adopte le
modèle de DUGDALE. Ce travail généralise les
résultats obtenus par FERDJANI et al ([19] [20] [21]) a un autre type de
structure. Ce serait intéressant de généraliser se
résultat a d'autre type de défaut, d'autre type de structure et
d'autre modèle de force cohésive. Ceci nécessite de
développer des théories et des outils numériques plus
adaptés.
BIBLIOGRAPHIES
1. [1] Abramowitz. M and e. I. A. Stegun. Handbook of
mathematical functions. National office of Standards, Appl. Math. Series 55,
1964.
2. [2] Barenblatt G. I., "The mathematical theory of equilibrium
cracks in brittle fracture", Adv. Appl. Mech., vol. 7, 1962, p. 55-129.
3. [3] Bourdin B., Francfort G. A., Marigo J.-J., "Numerical
experiments in revisited brittle fracture", J. Mech. Phys. Solids, vol. 48, n
4, 2000, p. 797-826.
4. [4] Bui H. D., Mécanique de la rupture Fragile,
Masson, Paris, 1978.
5. [5] Barenblatt. G. I. The mathematical theory of equilibrium
cracks in brittle fracture. Adv. Appl. Mech., 7:55-129, 1962.
6. [6] Chaboche J. L., Girard R., Levasseur P., "On the
interface debonding models.", Int. J. Damage Mech., vol. 6, 1997, p.
220-257.
7. [7] Charlotte M., Francfort G., Marigo J.-J., Truskinovsky
L., "Revisiting brittle fracture as an energy minimization problem : comparison
of Griffith and Barenblatt surface energy models", in A. Benallal (ed.),
Proceedings of Symposium on "Continuous Damage and Fracture", Elsevier, Paris,
2000, p. 7-12.
8. [8] Charlotte M., Laverne J., Marigo J.-J., "Initiation of
cracks with cohesive force models : avariational approach ", European Journal
of Mechanics A/Solids, vol. 25, p. 649-669, 2006.12 1re soumission à
Revue Européenne de Mécanique Numérique
9. [9] Charlotte. M, Laverne. J, and Marigo. J.-J. Initiation of
cracks with cohesive force models: a variational approach. European Journal of
Mechanics A/Solids, 25:649-669, 2006.
10. [10] Chen Y.F., Erdogan F., "The interface crack problem for
a non homogeneous coating bonded to a homogeneous substrate", J. Mech. Phys.
Solids, vol. 44, n° 5, p. 771-787, 1996.
11. [11] Cinar A., Erdogan F., "The crack and
wedging problem for an orthotropic strip", International Journal of
Facture. 83-102, 1982.
12. [12] Del Piero G., "One-dimensional ductile-brittle
transition, yielding, and structured deformations", variations of domain and
free-boundary problems in solid mechanics (Paris, 1997), vol. 66 of Solid Mech.
Appl., Kluwer Acad. Publ., Dordrecht, 1999, p. 203-210.
13. [13] Del Piero G., Truskinovsky L., "Macro- and
micro-cracking in one--dimensional elasticity", International Journal of Solids
and Structures, vol. 38, n° 6, 2001, p. 1135-1138.
14. [14] Dugdale D. S., "Yielding of steel sheets containing
slits ", J. Mech. Phys. Solids, vol. 8, p. 100-108, 1960.
15. [15] Dugdale. D. S. Yielding of steel sheets containing
slits. J. Mech. Phys. Solids, 8:100- 108, 1960.
16. [16] Delate F., Erdogan F., "The
problem of internal and edge cracks in an
orthotropic strip", Journal of applied Mechanics, vol. 44, p. 237-242, 1977.
17. [17] El Borgi. S, Keer L. «A receding contact plane
problem between a functionally graded layer and a homogeneous substrate ».
International Journal of Solids and Structures 43 (2006) 658-674. ELSEVIER.
18. [18] Erdogan. F, Gupta. G. D, and Cook. T.
Numerical solution of singular integral equation. In G. C. Sih editor, Methods
of analysis and solutions of crack problems, pages 368-425. Noordhoff
International Publishing, Leyden, 1973.
19. [19] Ferdjani. H, Abdelmaoula. R, Marigo. J-J «Etude
de l'influence des défauts de petite taille sur le comportement à
rupture avec le modèle de DUGDALE ». Revue européenne de
mécanique numérique. Volume 15-n° 4/2006, pages 409 à
425.
20. [20] Ferdjani. H, Khelifi. Med Z, Marigo. J-J «
Etude de l'influence des défauts de petite taille sur le comportement
à rupture avec le modèle de DUGDALE REGULARISE ». Revue
Européenne de Mécanique Numérique, volume 17-n°4/2008
pages 481 à 493.
21. [21] Ferdjani. R, Marigo. J-J, S. El Borgi «Study of
size effects in the Dugdale model through the case of a crack in a semi
infinite plane under antiplane shear loading ». Soumise a continuum
mechanic and thermodynamic.
22. [22] Ferdjani H., Abdelmoula R., Marigo J-J., " Study of
the influence of small size defects on the rupture behavior with the Dugdale
model" , Third International Conference on Advances in Mechanical Engineering
and Mechanics, Hammamet, Tunisia 17-19 Decembre 2006.
23. [23] Ferdjani H., Abdelmoula R., Marigo J.-J., «
Insensitivity to small defects of the rupture of materials governed by the
Dugdale model », Continuum Mechanics and Thermodynamics, vol. 19, P.
191-210, 2007.
24. [24] Ferdjani H., Abdelmoula R., Marigo J.-J., «
Insensitivity to small defects of the
rupture of materials governed by the Dugdale model »,
Continuum Mechanics and Thermodynamics, vol. 19, P. 191-210, 2007.
25. [25] Francfort G. A., Marigo J.-J., "Revisiting brittle
fracture as an energy minimization problem", J. Mech. Phys. Solids, vol. 46,
n° 8, 1998, p. 1319-1342.
26. [26] Griffith A. A., "The phenomena of rupture and flow in
solids", Phil. Trans. Roy. Soc. London, vol. CCXXI-A, 1920, p. 163-198.
27. [27] Griffith. A. A. The phenomena of rupture and flow in
solids. Phil. Trans. Roy. Soc. London, CCXXI-A: 163-198,1920.
28. [28] Gakhov F. D., Boundary Value Problems, Pergamon Press
and Addison-Wesley, Oxford, 1966.
29. [29] Gupta G., Erdogan F., "The
problem of edge cracks in an infinite strip", Journal of Applied
Mechanics, vol. 41, p. 1001-1006, 1975.
30. [30] Hillerborg A., Modeer M. and PETERSSON P. E., Analysis
of crack formation and
crack growth in concrete by means of fracture
mechanics and finite elements. Cement and Concrete Research
6(6):163-8 (1976).
31. [31] Irwin G. R., "Analysis of
stresses and strains near the end of a crack traversing a plate", J. Appl.
Mech., Trans. ASME, vol. 24, 1957, p. 361-364.
32. [32] Ioakimidis. N. I. The numerical solution of
crack problems in plane elasticity in the case of loading
discontinuities. Engineering Fracture Mechanics, 13:709-716, 1980.
33. [33] Laverne. J « Formulation Energétique de la
Rupture par des Modèles de Forces Cohésives:
Considérations Théoriques et Implantations Numériques
», Thèse de
Doctorat, Université Paris XIII, France, 2004.
34. [34] Laverne J., Marigo J.-J., "Approche globale, minima
relatifs et Critère d'Amorçage en Mécanique de la
Rupture", Comptes Rendus Mécanique, vol. 332, 2004, p. 313-409.
35. [35] Marigo J.-J., Truskinovsky L., "Initiation and
propagation of fracture in the models of Griffith and Barenblatt", Contin.
Mech. Thermodyn., vol. 16, n° 4, 2004, p. 391-409.
36. [36] Muskhelishvili N. I., Some basic problems of
mathematical theory of elasticity, 2nd ed., P. Noordhoff Ltd, Groningen,
1963.
37. [37] Michel J. C., Suquet P et Thebaud F., Une
modélisation du rôle des interfaces dans le
comportement des composites à matrice métallique.
Revue Européenne des Eléments Finis, 3(4) pp. 573-595 (1994).
38. [38] Needleman A., A continuum model for void nucleation by
inclusion debonding. J. of Appl. Mechanics, 54 , pp. 525-531 (1987).
39. [39] Rice J.R. and Wang J.- S., Embrittlement of interfaces
by solute segregation. Materials Science and Engineering A., 107, pp. 23-40
(1989).
40. [40] Salençon J., Calcul à la rupture et
analyse limite, Cours de Calcul des Structures Anélastiques, Presses de
l'Ecole Nationale des Ponts et Chaussées, 1983.
41. [41] Sneddon I., Srivastav R., "The stress field in the
vicitinity of a Griffith crack in a strip of finite width", International
Journal of Engineering Science, vol. 9, p. 479-488, 1971.
42. [42] Suquet P., Discontinuities and plasticity. In: Moreau
J.J., Panagiotopoulos P.D. (Eds.), Nonsmooth Mechanics and Applications.
Springer, Berlin, pp. 280-340 (1987).
43. [43] Tvergaard V., Effect of fibre
debounding in a whisker-reinforced metal. Mater. Sci.Engng. 125, pp.
203-213 (1990).
44. [44] Willis J. R. A comparison of the fracture criteria of
Griffith and Barenblatt. J. Mech. Phys. Solids, 15:151-162, 1967.
45. [45] Xie D., Waas A., "Discrete cohesive zone model for
mixed-mode fracture using finite element analysis ", Engineering Fracture
Mechanics, 2006.
| 

