|
ENSEIGNEMENT SUPÉRIEUR ET
UNIVERSITAIRE
UNIVERSITE DE LUBUMBASHI
FACULTÉ POLYTECHNIQUE
Département
d'Electromécanique




ENSEIGNEMENT SUPERIEUR ET UNIVERSITAIRE
UNIVERSITE DE LUBUMBASHI
FACULTE POLYTECHNIQUE
Département
d'électromécanique




EPIGRAPHE

DEDICACE

REMERCIEMENTS
Le présent travail est le résultat d'un travail
personnel intense et d'une collaboration fructueuse avec plusieurs personnes
ayant participé de différentes manières, mais aussi et
surtout le fruit des connaissances acquises à faculté
polytechnique de l'université de Lubumbashi.
Tout d'abord nos remerciements s'adressent à notre
équipe de direction, respectivement le directeur le professeur KATOND
MBAY Jean Paul ainsi que le codirecteur l'ingénieur KISULA NGOY Patrick
pour le suivi, l'encadrement, les conseils et l'orientation tout au long du
travail ; je voudrais ici vous adresser nos sentiments de profonde
gratitude.
Aussi nous remercions le personnel la faculté
polytechnique, les autorités académiques, professeurs, chefs de
travaux et assistants pour leur précieuse contribution à notre
formation.
Grand merci également à tous nos oncles et
tantes dont le soutien tant matériel qu'immatériel et les
encouragements nous ont permis d'arriver à cette étape si
importante de notre vie ; en particulier notre oncle Freddy MUKALAY et nos
tantes Evelyne KULAILA et Clarisse MUKEBO.
Aussi pour leur apport et aide lorsque s'est
présenté le besoin je remercie l'ingénieur Bob LWAPULA,
ingénieur Yvonne IBEBEKE ainsi que l'ingénieur Salva NDONGO.
Pour finir nous disons merci à nos collègues de
promotion auprès de qui nous avons énormément appris
à travers des discussions et débats incessants, ils ont su
créer l'émulation nécessaire au dépassement de soi.
Que toute personne ayant de près ou de loin
participé à ce travail trouve ici nos plus vifs remerciements.
Résumé
Les routes sont des parties importantes de
l'aménagement urbain car elles occupent de plus en plus le paysage des
villes non uniquement au sol comme avant mais aussi en hauteur avec des
réseaux complexes de routes construites pour faciliter la
mobilité des citadins.
A chaque passage d'engin roulant de tout type sur la route
l'énergie de frottement résultant est dissipée soit en
chaleur soit en énergie acoustique dont le bruit résultant est
parfois nocif pour la santé du voisinage. Cette grande quantité
d'énergie gaspillée quotidiennement constitue l'une des sources
les plus sûres d'énergies car l'homme continuera encore longtemps
à se mouvoir sur les routes. Pourtant une autre forme d'énergie
très utile au quotidien manque dans les villes de RDC, l'énergie
électrique.
Du passage répétitif de véhicules se
crée une énergie vibratoire exploitable pour être convertie
en électricité. Plusieurs moyens existent pour transformer cette
énergie en électricité qui ont plus ou moins fait leurs
preuves. Dans ce travail nous exploitons le moyen qui présente les
meilleurs résultats à ce jour, la
piézoélectricité.
Nous passons en revue les différentes étapes du
dimensionnement d'un module piézoélectrique capable de produire
de l'électricité tout en étant soumis aux
différentes conditions de la route. Nous étudions ensuite les
points essentiels nécessaires pour maximiser la quantité
d'énergie récoltée.
Le module résultant du dimensionnement est
constitué de transducteurs de type bridge présentant un
meilleur facteur de couplage électromécanique et coefficient de
transfert d'énergie mais surtout une grande capacité à
résister aux lourdes charges imposées à chaque passage de
véhicule. Nous évaluons également dans des conditions
idéalement favorables la quantité d'énergie que pourrait
produire un tel système qui est de 127 kWh par kilomètre,
l'énergie recueillie est ensuite stockée dans des super
condensateurs.
De l'étude il résulte que la puissance
récupérée est influencée par le choix des
matériaux, la géométrie de la structure, la
fréquence du signal d'excitation, mais aussi que le maximum de puissance
est obtenu à la résonance du système.
Abréviations
utilisées
- PEH : Piezoelectric Energy Harvester
(Récupérateur d'énergie piézoélectrique)
- VBEH : Vibration Based Energy Harvester
(Récupérateur d'énergie vibratoire)
- MEMS : Microelectromechanical systems
(Microsystèmes électromécaniques)
- CGP : Circuit de gestion de puissance
- PZT : titano-zirconates de plomb
- PVDF : polyfluorure de vinylidène
Table des matières
EPIGRAPHE...... I
DEDICACE........ II
REMERCIEMENTS III
Résumé............. IV
Abréviations utilisées V
Table des matières VI
Liste des figures... VIII
Liste des
tableaux........................................................................................
X
INTRODUCTION 1
CHAPITRE 1
LES SYSTEMES DE RECUPERATION D'ENERGIE VIBRATOIRE
3
1.1
Notion de récupération
d'énergie 3
1.2
Les transducteurs 4
1.2.1
Rôle et fonctionnement 4
1.2.2
Classification des transducteurs et
caractéristiques 6
1.3
Energie vibratoire 9
1.3.1
Définitions et concepts 9
1.3.2
Les différents moyens de transduction
mécano-électriques 11
CHAPITRE 2
ETUDE THEORIQUE ET DIMENSIONNEMENT D'UN GENERATEUR
PIEZOELECTRIQUE 18
2.1
Principe de fonctionnement 18
2.1.1
Théorie de la
piézoélectricité 18
2.1.2
Mise en équation de la
piézoélectricité 19
2.1.3
Les modes de couplage
électromécanique 23
2.1.4
Le couplage électromécanique
intrinsèque des matériaux piézoélectriques
23
2.2
Les matériaux
piézoélectriques 24
2.3
Etude de la structure de la structure de
récupération d'énergie 27
2.4
Choix et descriptions 30
2.4.1
Description de l'environnement de fonctionnement
30
2.4.2
Choix de la structure et des matériaux
31
2.4.3
Choix des matériaux 32
2.4.4
Le module piézoélectrique 37
CHAPITRE 3
ETUDE ET MODELISATION DU SYSTEME 41
3.1
Présentation du logiciel utilisé
41
3.2
Modélisation du module
générateur 41
CONCLUSION... 49
Bibliographie...... 50
Liste des figures
Figure 1 : Rôle du transducteur
4
Figure 2 : Schéma bloc d'un transducteur
6
Figure 3 : Schéma de principe d'un
générateur d'énergie vibratoire
9
Figure 4 : Récupérateur à un
degré de liberté soumis à une excitation 10
Figure 5 : Générateur
d'énergie vibratoire électromagnétique à un
degré de liberté 12
Figure 6 : récupération
d'énergie vibratoire électrostatique 13
Figure 7 : Prototype d'un
générateur électrostatique développé par
Omron et Holst Center/Imec 14
Figure 8 : Conversion
électromécanique du matériau piézoélectrique
15
Figure 9 : Effets piézoélectriques
direct à gauche et inverse à droite (JUSTEAU, 2020) 18
Figure 10 : Effet piézoélectrique
direct à l'échelle microscopique (Ahmed-Seddik, 2012) 19
Figure 11 : Relations entre les grandeurs
physiques 20
Figure 12 : Les modes de couplage
électromécanique 24
Figure 13 : Poutre en porte-à-faux
(cantilever beam) 27
Figure 14 : Transducteur en diaphragme circulaire
: (a) Vue de face ; (b) Vue de profil 28
Figure 15 : Transducteur en cymbale 28
Figure 16 : Transducteur
piézoélectrique en pile (stack) 29
Figure 17 : Environnement de travail et
disposition 30
Figure 18: Comparaison des performances des
structures cymbale et en pont 31
Figure 19 : Transducteur en pont 32
Figure 20 : Dimensions des transducteurs
utilisés dans le module 35
Figure 21 : Module piézoélectrique
avec transducteurs en pont (Wang, et al., 2019) 37
Figure 22 : Module piézoélectrique
avec liaisons électriques effectuées 38
Figure 23 : Modèle de Williams et Yates
42
Figure 24 : Diagramme de corps libre du
modèle 42
Figure 25 : évolution fréquentielle
du déplacement relatif de la masse sismique 46
Liste des tableaux
Tableau 1-1 : Principes physiques de transduction
5
Tableau 1-2 : Comparaison entre les principaux
types de transducteurs électromécaniques (HOANG, 2019) 16
Tableau 2-1 : Les grandeurs physiques 20
Tableau 2-2 : Equations constitutives de la
piézoélectricité (Carlioz, 2009) 21
Tableau 2-3 : Définition de
différentes constantes (Ahmed-Seddik, 2012) 21
Tableau 2-4 : Types et caractéristiques
des matériaux piézoélectriques (Covac, et al., 2020)
26
Tableau 2-5 : Comparatif entre les
polymères et céramiques piézoélectriques 27
Tableau 2-6 : Avantages et inconvénients
des différentes configurations de transducteur
piézoélectrique 29
Tableau 2-7 : Comparatif des principaux
matériaux utilisées comme substrat 33
Tableau 2-8 : Figures de mérite de
quelques matériaux piézoélectriques 35
INTRODUCTION
Dans nos sociétés actuelles le style de vie est
de plus en plus régis par la présence ou non
d'électricité. En effet cette forme d'énergie est devenue
incontournable, tant ou lui trouve des applications dans des domaines
très variés au quotidien. Pourtant en RDC une faible part de la
population y a accès de manière régulière et
suffisante et la croissance démographique prédite par les nations
unies (Department of Economic and Social A?airs, Population Division, 2019)
laisse présager une aggravation de la situation.
De ces observations nous avons réfléchi sur le
développement de sources d'électricité non polluantes et
abondantes dans l'environnement capables de fournir de l'énergie
électrique de manière totalement autonome vis à vis du
réseau électrique national. L'urgence des besoins exige donc une
production décentralisée de l'énergie
électrique : c'est-à-dire au plus proche possible de son
utilisation.
C'est ainsi qu'au cours des dernières années
s'est développé le domaine de l'énergie solaire comme
alternative principale. Il est à noter toutefois plusieurs défis
face à son déploiement à grande échelle en milieu
urbain comme l'occupation de l'espace, la fragilité des cellules ou
encore la forte dépendance de ces systèmes aux conditions
climatiques. Cependant tous les jours dans les villes, des milliers de
véhicules parcourent des kilomètres de route tout en produisant
une grande quantité d'énergie mécanique sous forme de
vibrations.
C'est au 19ème siècle que la
propriété de conversion d'une contrainte mécanique en
électricité a été découverte avec
piézoélectricité. Au cours des années cette
propriété a été à la base d'inventions
importantes comme le sonar ou encore le microphone et plusieurs autres
capteurs.
Ainsi l'objectif de ce travail est d'aboutir à un
générateur fonctionnant dans des conditions optimales et capable
de fournir de l'électricité pour des besoins d'éclairage
des voies routières partant des vibrations produites par le passage de
véhicules sur la route, pour ainsi réduire la charge sur le
réseau électrique national et par conséquent contribuer
à une meilleure desserte pour la population (ménages). A ce jour
il existe plusieurs effets utilisables à cette fin comme l'effet
électrostatique, l'effet électromagnétique et l'effet
piézoélectrique. C'est ce dernier qui fera l'objet de notre
recherche.
Pour ce faire on s'y prendra en étudiant et confrontant
les publications sur le sujet par rapport aux attentes fixées, puis on
étudiera les équations modélisant le
générateur afin d'en déduire ces conditions optimales de
fonctionnement.
Le travail est réparti sur trois parties :
Dans la première partie nous passons en revue les
méthodes de conversion électromécanique.
La seconde traite quant à elle des théories sur
la piézoélectricité et sur les étapes et
méthodes de dimensionnement d'un générateur
piézoélectrique.
Dans la troisième partie sera présenté un
modèle mathématique d'un tel générateur qui sera
ensuite simulé à l'aide de Matlab.
CHAPITRE 1 LES SYSTEMES DE RECUPERATION
D'ENERGIE VIBRATOIRE
1.1 Notion de
récupération d'énergie
La récupération d'énergie (energy
harvesting en anglais) est le processus de récolte d'une
énergie gaspillée et de sa transformation en énergie utile
d'une autre forme.
L'histoire de la récolte d'énergie remonte
à l'époque des moulins à vent et à la roue
hydraulique. Depuis des siècles l'homme est à la recherche de
moyens de récupérer de l'énergie issue de l'environnement
comme la chaleur et la force du vent dans le but d'effectuer un travail. C'est
au cours du 19ème siècle qu'ont eu lieu les grandes
découvertes à la base de la prolifération de
l'énergie électrique dans les industries, puis dans les
ménages. Cependant le domaine rencontre un sérieux regain
d'intérêt depuis que les avancées en électronique
permettent de mettre au point des équipements qui nécessitent des
puissances électriques dérisoires.
L'engouement pour la récolte d'énergie est aussi
dû au fait que la cause climatique est aujourd'hui une priorité,
en effet dans le domaine de la récolte d'énergie on fait
intervenir uniquement des moyens de production d'électricité non
polluants. Il est question de transformer en électricité une
énergie qui est soit produite naturellement comme la lumière du
soleil ou encore celle issue des masses en mouvement dans les machines
construites par des humains.
L'énergie tirée en quantité relativement
faible est soit stockée pour alimenter des charges de faible
consommation électrique soit est directement connectée à
la charge sans stockage.
On a ainsi à disposition une source
d'électricité sur le lieu même de son utilisation, la
question du transport de l'énergie qui peut parfois être
très coûteuse est alors résolue et le fait de cette
« décentralisation » permet un fonctionnement
indépendant et donc il n'y pas lieu de tout interrompre s'il y a un
problème avec un générateur comme dans le cas d'une source
unique d'électricité.
L'énergie récupérée est convertie
en électricité par des équipements appelés
transducteurs. Un transducteur est appareil dont la fonction est de convertir
une forme d'énergie en une autre. Le processus de conversion est connu
sous le nom de transduction. La conversion se fait donc partant de la
quantité physique à laquelle est sensible le transducteur comme
la température, la pression et le son pour ne citer que ça.
1.2 Les
transducteurs
1.2.1 Rôle et fonctionnement
Les transducteurs jouent un rôle central dans la
récolte d'énergie car ils assurent la conversion de la forme
d'énergie. Dans le cas de générateurs
d'électricité ils permettent de convertir l'énergie
ambiante en énergie électrique selon des principes physiques qui
dépendent de la source d'énergie. Il existe ainsi plusieurs
manières de classifier un transducteur selon différents
critères.
Le Tableau 1-1 (Mari, 2011) résume les principes
physiques sur lesquels se basent les transductions entre différents
types de signaux (forme de quantité physique) et situe la
piézoélectricité.
Il est à noter tout de même qu'un transducteur
est en réalité un ensemble de deux parties principales : Le
capteur et l'unité de conditionnement du signal.
Un capteur est un dispositif utilisé pour
détecter les changements dans n'importe quelle quantité physique
comme la température, la vitesse, le niveau, la pression, etc. Toute
variation de la quantité d'entrée est prélevée par
le capteur qui induit aussi une variation dans la quantité de sortie. A
ce stade les signaux d'entrée et de sortie sont des quantités
physiques et pas encore des signaux de nature électrique.
L'unité de conditionnement du signal quant à lui
joue le rôle de traduire la variation de quantité
détectée par le capteur en signal électrique de sorte
à être exploitable par exemple pour être affiché sur
un appareil d'affichage. On obtient alors le schéma bloc d'un traducteur
sur la Figure 2.






|
Signal de sortie
|
|
Signal d'entrée
|
|
Mécanique
|
Thermique
|
Electrique
|
Magnétique
|
Optique
|
Chimique
|
|
Mécanique
|
|
|
Piézoélectricité
Piézorésistivité
|
Effets magnéto magnétique
|
Effet Sagnac
Effet Doppler
|
|
|
Thermique
|
Effets électromécanique et
électrocinétique
Effet piézoélectrique inverse
|
Effet Joule
Effet Peltier
|
Effet Seebeck
Thermorésistante
Pyroélectricité
|
Loi de Biot-Savart
|
Effet thermooptique
Effet électrooptique
Electroluminescence
|
Electrolyse
Electromigration
|
|
Electrique
|
|
Magnétique
|
Magnétostriction
|
Effet Righi-Leduc
Effet Ettinghausen
|
Effet Ettingshausen-Nernst
Effet Hall
|
|
Effet Faraday
Effet Cotton-Mouton
|
|
|
Optique
|
|
Thermopile
Bolomètre
|
Effet photovoltaïque
|
|
Bistabilité optique
|
Photosynthèse
|
|
Chimique
|
Hygromètre
|
Calorimètre
|
Conductimétrie
Effet Volta
Potentiométrie
|
|
Spectroscopie
|
|
Tableau 1-1 : Principes
physiques de transduction
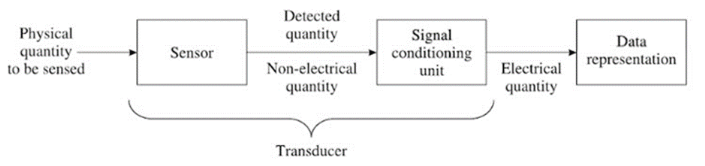
Figure 2 : Schéma
bloc d'un transducteur
L'équipement assurant la fonction inverse du
transducteur est appelé « actionneur »
(actuator en anglais). On peut donc définir un actionneur comme
un équipement permettant de transformer l'énergie
reçue(l'électricité) en un phénomène
physique (déplacement, dégagement de chaleur, émission de
lumière ...). Comme exemple d'actionneurs on peut citer entre autres un
moteur pas à pas, un afficheur 7 segments, un ventilateur, une
électrovanne, un moteur à courant continu, un vérin, un
buzzer, une résistance chauffante. Les actionneurs sont parfois
appelés transducteurs de sortie.
1.2.2 Classification des transducteurs et
caractéristiques
Il existe plusieurs manières de classifier les
transducteurs, mais nous nous limiterons ici aux trois points suivants :
- Effet physique
- Quantité physique
- La source d'énergie
? Classification par rapport à l'effet
physique
Cette classification se base sur l'effet physique
utilisé pour convertir la quantité physique en
électricité. Par exemple, le changement de résistance
(quantité physique) d'un conducteur est proportionnel à la
variation de température. Les effets physiques habituellement
utilisés sont :
- La variation de résistance
- La variation de l'inductance
- La variation de capacité
- L'effet Hall
- L'effet piézoélectrique
? Classification par rapport à la
quantité physique
Cette classification se base sur la quantité physique
qui est convertie en électricité. En voici une liste non
exhaustive avec des exemples correspondant :
- Transducteur de température _ ex :
Thermocouple
- Transducteur de pression _ ex : Gauge Bourdon
- Transducteur de déplacement _ ex : LVDT (Linear
Variable Differential Transformer)
- Transducteur de débit _ ex :
Débitmètre
- Transducteur de force _ ex : Dynamomètre
- Transducteur d'accélération _ ex :
Accéléromètre
? Classification par rapport à la source
d'énergie
Cette classification se base sur le fait que le fonctionnement
du transducteur nécessite ou non une source d'énergie externe.
Dans cette catégorie on retrouve :
- Les transducteurs actifs : La transduction est faite
sans intervention d'une source d'énergie externe et le signal obtenu
à la sortie est une tension ou un courant
- Les transducteurs passifs : Ceux-ci nécessitent
une source d'énergie externe et le résultat de la transduction
est une variation soit de la résistance, de l'inductance ou de la
capacité
Un transducteur présente certaines caractéristiques
entrant en compte lors du choix de celui-ci :
1. Le principe de fonctionnement
2. La sensibilité
3. La plage de fonctionnement
4. La précision
5. La sensibilité croisée
6. Les erreurs
7. L'effet de changement
8. Compatibilité environnementale
9. Insensibilité aux signaux indésirables
10. Usage et robustesse
11. Stabilité et fiabilité
12. Caractéristique statique
Après ce tour d'horizon sur les transducteurs, passons
en revue les principales énergies entrant en jeu en matière de
récolte d'énergie.
Il est à noter qu'il existe de nombreuses autres
sources d'énergie potentiellement exploitables pour la production
d'électricité comme l'énergie thermoélectrique ou
encore la récupération par des ondes
électromagnétiques (ondes RF) ou encore par gradient de
température mais nous n'irons pas plus loin dans leur étude.
1.3 Energie
vibratoire
1.3.1 Définitions et concepts
Depuis le début de la révolution industrielle au
19è siècle, les sociétés autrefois majoritairement
agraires sont plus en plus industrielles et commerciales. Ce changement majeur
dans l'histoire humaine est dû à un phénomène :
La production d'énergie, et donc de travail par des machines
fonctionnant soit par la vapeur (après combustion de charbon) soit par
le pétrole. Et depuis, nos sociétés ont
complètement changé car actuellement les machines mues par des
moteurs sont omniprésentes dans tous les domaines. Il existe pourtant un
point commun entre toutes ces machines : elles vibrent.
Nous étudions dans les points qui suivent la
récupération de l'énergie vibratoire (en anglais
Vibration Based Energy Harvesting en sigle VBEH). Une vibration est un
mouvement d'oscillation mécanique autour d'une position
d'équilibre stable ou d'une trajectoire moyenne.
L'objectif d'un système à
récupération d'énergie vibratoire est de produire de
l'électricité à partir d'une source externe de vibration
qui peut être par exemple une voiture avec le moteur en marche. Le
schéma de principe d'un tel générateur est
représenté par la figure suivante, qui se compose de trois
parties :











- Un convertisseur mécano-mécanique : Il a
pour objectif l'adaptation du mouvement mécanique reçu au type du
transducteur utilisé. Souvent on utilise un résonateur qui
traduit des vibrations brutes de la source en un mouvement relatif entre une
masse sismique et la source des vibrations.
- Un convertisseur mécano-électrique :
C'est à ce niveau qu'intervient la transduction car la grandeur
d'entrée est une énergie mécanique et celle de sortie une
énergie électrique. A ce niveau il existe plusieurs transducteurs
possibles.
- Un convertisseur électro-électrique : Il
s'agit d'un système chargé de mettre en forme le signal
électrique obtenu afin de l'adapter à l'utilisation qui lui est
destinée. Ce dernier point ne fera pas partie de notre travail de
recherche.
La Figure 4 illustre le modèle général de
système de récupération d'énergie vibratoire
à 1 degré de liberté (Yildirim, et al., 2017).
Ce modèle permet de donner une estimation de la
puissance théoriquement récupérable à une
fréquence et une accélération données. Il est
composé essentiellement composé d'un système masse-ressort
à un seul degré de liberté, la masse est attachée
à un support vibrant via un ressort de raideur k et via deux
amortisseurs de et dm qui sont les composantes de
l'amortisseur d sur la figure. Le support est soumis aux vibrations du milieu
ambiant, ce déplacement du support induit un déplacement relatif
de la masse sismique m par rapport au support vibrant via la déformation
du ressort k. L'amplitude du déplacement relatif nous renseigne sur la
quantité d'énergie mécanique transmise de la source de
vibration vers le système résonant masse-ressort.
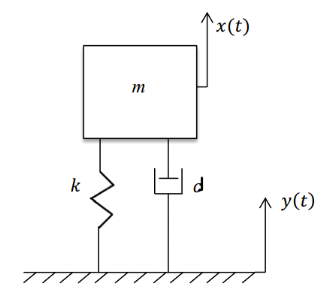
Figure 4 :
Récupérateur à un degré de liberté soumis
à une excitation
Avec :
de : la composante ou contribution
électrique de l'amortissement
dm : la composante ou contribution
mécanique de l'amortissement
k : la raideur du ressort
1.3.2 Les différents moyens de transduction
mécano-électriques
Les principes essentiels pour convertir l'énergie
mécanique en électricité sont :
électrostatique, électromagnétique et
piézoélectrique. Chaque technique correspondante a ses propres
avantages et inconvénients, tout dépend de plusieurs
paramètres liés à l'énergie disponible dans la
source de vibration et aux contraintes de l'application comme :
- L'encombrement autorisé
- La fréquence d'entrée
- L'étendue du spectre de vibration
- L'amplitude de la vibration
- Le type de charge à alimenter et d'autres
1.3.1.1 Les générateurs
électromagnétiques
Ce type de générateur fonctionne grâce
à l'effet électromagnétique du mouvement
relatif d'un
conducteur dans un champ magnétique. La vibration ambiante excite la
base du système, ce qui entraîne un mouvement de translation
relatif de l'aimant par rapport à la bobine (HOANG, 2019).
Ce mouvement oscillant relatif provoque une variation du flux
magnétique à l'intérieur de la
bobine. La tension
induite dans la bobine peut être déterminée par la loi
de
Faraday :

où å est la tension induite et   est le flux magnétique. est le flux magnétique.
La tension en circuit ouvert à travers la bobine est
donnée par l'équation suivante :
  où N est le nombre de spires de la bobine, B
est l'induction magnétique, l est la longueur d'un
enroulement, et x est le déplacement relatif de l'aimant par rapport
à la bobine. La puissance électrique
récupérée est transmise à la charge RL. où N est le nombre de spires de la bobine, B
est l'induction magnétique, l est la longueur d'un
enroulement, et x est le déplacement relatif de l'aimant par rapport
à la bobine. La puissance électrique
récupérée est transmise à la charge RL.
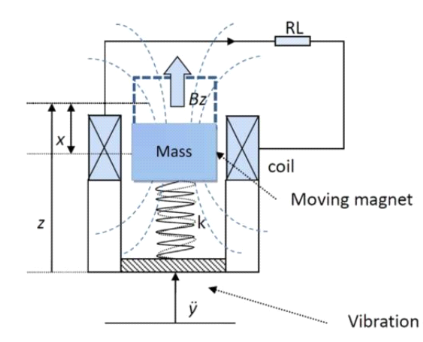
Figure 5 :
Générateur d'énergie vibratoire
électromagnétique à un degré de
liberté
Cette technologie est assez mature avec l'apparition de
produits sur le marché,
notamment dans les applications industrielles
utilisant des machines tournantes et dans les
applications ferroviaires. Ces
produits ont généralement un volume de quelques dizaines
de
centimètres cubes. Le modèle DICE de la
société Kinergizer qui a un volume de 36 cm3
peut
récupérer une puissance maximale de 2,5 mW (en fonction
du niveau de vibration < 10 g).
La société suédoise ReVibe Energy propose
trois modèles de récupération d'énergie
intégrés
avec une option de gestion du stockage
d'énergie. Le modèle Q a un volume de 15,6 cm3 et un
poids de 60 grammes, il peut récupérer une puissance maximale de
150 mW à 1 g
d'accélération. Le modèle
PMG la société Perpetuum peut fournir une puissance maximale de
27,5 mW, son volume est de 253 cm3 et sa masse est d'environ 1
kg.
1.3.1.2 Les générateurs
électrostatiques
On peut également convertir de l'énergie
vibratoire en énergie électrique grâce à
l'effet
électrostatique. Le principe de conversion est simple : un
mouvement relatif entre les deux
plaques séparées par de l'air
ou un milieu diélectrique génère une variation de
capacité et donc du nombre de charges électriques, comme
montré dans la figure suivante (HOANG, 2019).
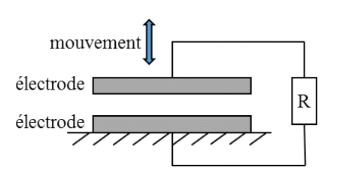
Figure 6 :
récupération d'énergie vibratoire
électrostatique
Les générateurs électrostatiques peuvent
être classés en deux catégories :
Les convertisseurs électrostatiques sans
électret : ils utilisent des cycles de
conversion en charges et
décharges du condensateur (un circuit électronique actif
est
alors nécessaire pour appliquer le cycle de charge sur la structure et
doit être
synchronisé avec la variation de capacité). Ce
type de convertisseur à deux modes
de fonctionnement : charge
imposée ou tension imposée. L'énergie totale
convertie
s'exprime suivant la formule :

Avec Q0 est la charge stockée, V0 est la
tension initiale, Cmin est la capacité
minimale
lorsque la distance entre les deux plaques est maximale, Cmax est
la
capacité maximale lorsque la distance entre les deux
plaques est minimale (état
initial).
- Les convertisseurs électrostatiques à base
d'électret : ils sont assez similaires aux
convertisseurs
électrostatiques sans électret, la principale différence
est que des
couches d'électret sont ajoutées à l'une
et/ou l'autre des deux plaques
conductrices du dispositif. Étant
donné que ces couches de matériaux
diélectriques
présentent un état de polarisation électrique quasi
permanent, cette
propriété permet au dispositif de convertir
directement de l'énergie mécanique
en énergie
électrique. Il est à noter que la couche d'électret
après le dépôt
nécessite un chargement initial
pour convertir efficacement les vibrations en
énergie
électrique.
Malgré sa grande compatibilité avec les
techniques de fabrication des Microsystèmes
Electromécaniques
(MEMS), cette technologie est moins mature. A notre connaissance, aucun produit
de récupération d'énergie vibratoire de ce type n'est
présent sur le marché. Toutefois, Omron et Holst Center/Imec ont
proposé un prototype contenant un générateur
électrostatique à base d'électret et un Circuit de Gestion
de la Puissance (CGP). Il peut convertir et stocker une énergie
vibratoire de l'ordre du uW avec un rendement élevé. Le prototype
ne mesure que 5 x 6 cm2.
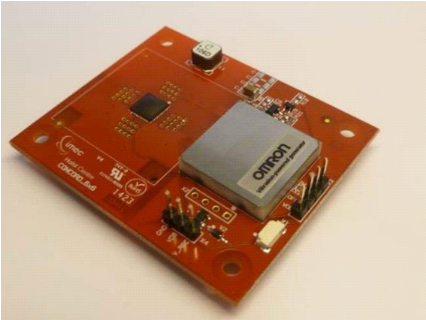
Figure 7 : Prototype d'un
générateur électrostatique développé par
Omron et Holst Center/Imec
1.3.1.3 Les générateurs
piézoélectriques
Les générateurs piézoélectriques
fonctionnent grâce aux propriétés particulières
des
matériaux piézoélectriques, notamment la
capacité à générer une énergie
électrique en réponse à une sollicitation (contrainte ou
déformation) mécanique. La figure 8 présente
brièvement le principe de cette conversion
électromécanique. Une tension de même polarité que
la tension de polarisation apparaît entre les électrodes lorsque
le matériau est comprimé, et la polarité opposée
apparaît lorsqu'il est étiré. Le principe de fonctionnement
de cette technologie sera détaillé dans le chapitre suivant
(HOANG, 2019).
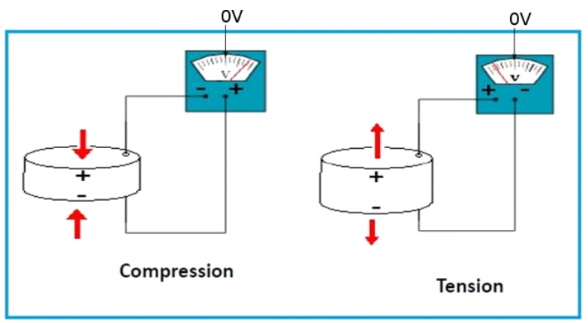
Figure 8 : Conversion
électromécanique du matériau
piézoélectrique
Des produits proposés sur le marché sont
globalement des structures de type poutre. La société Piezo.com
propose une large gamme de générateurs
piézoélectriques sans CGP. L'entreprise PI piezo technology
propose un module d'évaluation avec leur générateur
piézoélectrique DuraAct et un CGP. Le module peut fournir une
puissance de sortie de 100 mW avec une tension de 3,3 V. La
société française Tekceleo propose deux
accéléromètres trois axes autonomes avec des
générateurs piézoélectriques
intégrés, des CGPs et le protocole de communication de BLE
(Bluetooth basse énergie). D'autres produits basés sur la
technologie piézoélectrique sont également proposés
par les sociétés 8power, Microgen, Qortek,
développés spécialement pour une application.
En 2009, la société Israélienne
INNOWATTECH en collaboration avec l'institut technologique Israélien
TECHNION, a mis au point un système constitué de modules
piézoélectriques placés sous la route ainsi que de
batteries pour le stockage de l'énergie. Selon la communication
d'INNOWATTECH, ce système est capable de produire en une heure une
énergie électrique de 200kWh sur 1 km de route (INNOWATTECH,
2010). Hélas ni INNOWATTECH, ni TECHNION n'a fourni publiquement de
données techniques sur cette prouesse (ZHAO, et al., 2012).
Voici un tableau comparatif des trois moyens de transductions
cités :
|
Types
|
Densité max. d'énergie
(mJ/cm3)
|
Avantages
|
Inconvénients
|
|
Electromagnétique
|
24.8
|
- Faible impédance de sortie
- Courants de sortie
élevés
- Longue durée de vie
- Robustesse
-
Flexibilité de conception
|
- Faibles tensions de sortie (< 1 V)
- Faible
efficacité dans les basses
fréquences et les petites
tailles
- Matériaux coûteux
- Difficultés pour
réduire la taille
|
|
Electrostatique
|
4
|
- Tensions de sortie élevées
- Facilité
de redressement de tension et de réglage de fréquence
-
Compatible avec les techniques de fabrication des
microsystèmes
électromécaniques (MEMS)
|
- Fréquence de résonance élevée
-
Impédance de sortie élevée
- Faibles courants de
sortie
- Circuit de commutation nécessaire au fonctionnement
-
Source de tension nécessaire pour
la charge initiale dans le cas
d'une conversion sans électret
- Pertes dues à la
capacité parasite
- Rupture diélectrique
- Besoin de
contrôler les
dimensions en um
|
|
Piézoélectrique
|
35.4
|
- Structure simple
- Tensions de sortie
élevées
- Facilité de redressement de tension
-
Densité d'énergie élevée
- Coefficient de
conversion élevé
|
- Faible courant de sortie.
- Impédance de sortie
élevée.
|
Tableau 1-2 : Comparaison
entre les principaux types de transducteurs électromécaniques
(HOANG, 2019)
La suite de ce travail traitera des générateurs
d'électricité par transduction piézoélectrique car
c'est le moyen le plus efficace parmi les trois technologies vues ci-haut.
Cependant on retrouve en pratique des générateurs hybrides qui
combinent les différents moyens de transduction.
CHAPITRE 2 ETUDE
THEORIQUE ET DIMENSIONNEMENT D'UN GENERATEUR PIEZOELECTRIQUE
2.3 Principe de fonctionnement
2.3.1 Théorie de la
piézoélectricité
Le mot
« piézoélectricité » vient de la
contraction des mots grecs piezen et eleckron qui veulent
dire respectivement pression et électron. La
piézoélectricité est la capacité de certains
matériaux de pouvoir transformer une énergie mécanique en
une énergie électrique et vice-versa. Elle a été
observée qualitativement pour la première fois par René
Just Haüy en 1817, mais on en attribue la découverte à
Pierre et Jacques Curie qui ont été les premiers à en
faire l'étude en 1880. On distingue deux effets de la
piézoélectricité : l'effet direct et l'effet inverse
(Ahmed-Seddik, 2012). L'effet piézoélectrique direct correspond
à l'apparition de charges électriques sous une contrainte
mécanique et l'effet piézoélectrique inverse qui
correspond à une déformation du matériau lorsqu'on
applique un champ électrique au matériau (Figure 9). Cet effet a
deux propriétés : lorsque la contrainte est nulle, les charges
s'annulent, et lorsque le sens des contraintes est inversé, le signe des
charges est inversé (Defosseux, 2011).
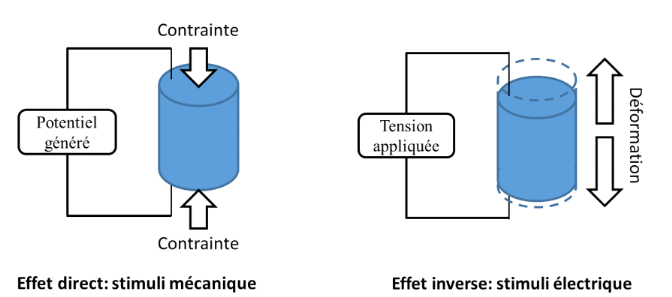
Figure 9 : Effets
piézoélectriques direct à gauche et inverse à
droite (JUSTEAU, 2020)
On retrouve cet effet piézoélectrique dans
certains cristaux (Un cristal est un solide dont les constituants
molécules sont assemblés de manière
régulière, c'est-à-dire qu'un même motif est
répété à l'identique un grand nombre de fois selon
un réseau régulier. La plus petite partie du réseau
permettant de récompenser l'empilement est appelée une maille).
Il résulte du décalage des barycentres de charge positives et
négatives de la maille cristalline suite à la déformation
mécanique de cette maille.
Ainsi la piézoélectricité est fortement
liée à la symétrie de la maille comme le montre la Figure
10, un matériau centrosymétrique (est celui constitué de
mailles dont les barycentres de charges positives et négatives demeurent
confondus peu importe la sollicitation mécanique à laquelle la
maille est soumise) ne peut donner lieu à un cristal
piézoélectrique.
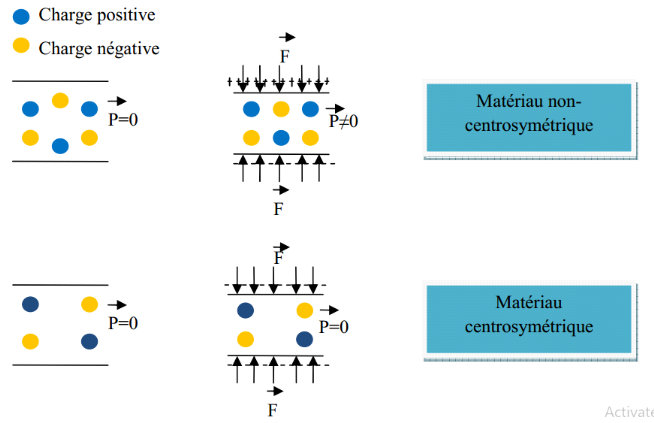
Figure 10 : Effet
piézoélectrique direct à l'échelle microscopique
(Ahmed-Seddik, 2012)
2.3.2 Mise en équation de la
piézoélectricité
Par sa définition même, la
piézoélectrique met en relation des propriétés
électriques et mécaniques.
L'effet piézoélectrique direct est l'apparition
de charges lorsque le matériau est soumis
à une contrainte.
Ces charges sont proportionnelles à la contrainte, et s'inversent
lorsqu'on
inverse le sens de la contrainte. L'effet
piézoélectrique direct se traduit par :

L'effet piézoélectrique inverse se traduit par
une déformation du matériau sous l'application d'un champ
électrique :

Avec :
|
Grandeur Physique
|
Symbole
|
Unité
|
|
Contrainte
|
T
|
N.m-2
|
|
Déformation
|
S
|
-
|
|
Champ électrique
|
E
|
V.m-1
|
|
Induction électrique (Polarisation)
|
D
|
C.m-2
|
|
Souplesse
|
s
|
m2.N-1
|
|
Constante piézoélectrique
|
D
|
m.V-1
|
|
Permittivité électrique
|
E
|
F.m-1
|
Tableau 2-1 : Les
grandeurs physiques
En plus de ces deux effets décrits par les relations
(2-1) et (2-2) s'ajoute les propriétés élastiques et
diélectriques du matériau qui se traduisent par les relations
suivantes :


En y regardant de plus près on remarque que
l'équation 2-3 n'est qu'une réécriture de la loi de Hooke
appliquée au matériau piézoélectrique.
La figure suivante résume graphiquement les relations
entre les différentes gradeurs physiques entrant en jeu qui sont :
- Les grandeurs électriques : le champ
électrique et l'induction électrique
- Les gradeurs mécaniques : la contrainte et la
déformation
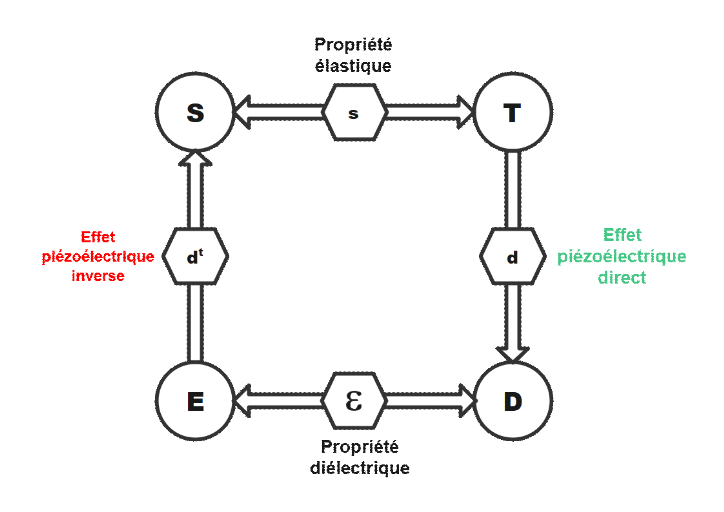
Figure 11 : Relations
entre les grandeurs physiques
Le comportement fondamental de la
piézoélectricité s'écrit donc par couple
d'équation :

- La notation d'une grandeur avec un exposant autre que
« t » veut dire que la grandeur est
considérée lorsque l'exposant est nul ou constant, il ne s'agit
pas d'une puissance mais plutôt d'une représentation
symbolique.
- Le « t » veut dire la transposée
de la grandeur.
Le comportement fondamental de la
piézoélectricité peut s'écrire aussi par trois
autres couples d'équations qui s'équivalent :
|
|
Grandeurs mécaniques
|
|
Variables indépendantes
|
T
|
S
|
|
Grandeurs électriques
|
E
|
|
|
|
D
|
|
|
Tableau 2-2 : Equations
constitutives de la piézoélectricité (Carlioz,
2009)
|
Paramètre
|
Définition
|
Unité
|
Dimension
|
|
Electrique
|
e
|
Permittivité diélectrique
|
|
3*3
|
|
b
|
Perméabilité électrique
|
|
3*3
|
|
Mécanique
|
s
|
Souplesse
|
|
6*6
|
|
c
|
Raideur, rigidité élastique
|
|
6*6
|
|
Piézoélectrique
|
d
|
Constante de charge
|
  ou ou  
|
3*6
|
|
e
|
Constante piézoélectrique
|
|
3*6
|
|
g
|
Constante de tension
|
|
3*6
|
|
h
|
Constante piézoélectrique
|
  ou ou  
|
3*6
|
Tableau 2-3 :
Définition de différentes constantes (Ahmed-Seddik, 2012)
Les 4 couples d'équations du Tableau 2-2 étant
équivalents, il existe des relations entre les différentes
constantes électriques, mécaniques et
piézoélectriques.






Nous utiliserons dans la suite du travail le couple
d'équations 2-5 car il fait varier directement les grandeurs intensives
T et E.
Le champ électrique E et l'induction électrique
D sont des vecteurs avec 3
composantes. La contrainte T et la
déformation S sont des tenseurs avec 6 composantes : les 3 axes du
repère, et les axes croisés correspondant aux rotations. De ce
fait, la souplesse s
s'exprime sous la forme d'un tenseur 66, les
coefficients piézoélectriques d sous la forme
d'un tenseur 63,
et la permittivité électrique sous la forme d'un tenseur 33.



2.3.3 Les modes de couplage
électromécanique
Un matériau piézoélectrique peut être
utilisé de trois façons : le mode 33 aussi appelé
mode longitudinal, le mode 31 aussi appelé mode transversal et le mode
15 ou mode de cisaillement. Le premier chiffre indique l'axe de polarisation,
et le second chiffre indique l'axe de la déformation résultante
d'après la Figure 12. Dans le mode 33 la tension sur l'axe de
polarisation conduit à une déformation le long du même axe.
Ce mode présente généralement le plus grand effet
piézoélectrique des différents modes de fonctionnement. Le
mode 31 utilise la contraction latérale résultant du même
champ électrique. A cause de la symétrie de la maille, le mode 32
est identique au mode 31.
Le mode 15 existe aussi mais, comme le montre les indices, ce
mode nécessite que les électrodes soient perpendiculaires
à l'axe 1. Ce mode utilise une déformation de cisaillement dans
le plan 31 et la notation y relative est 15. Comme dans le mode de
fonctionnement 31, les conditions de symétries impliquent que le mode 24
présente un comportement similaire (Carlioz, 2009).
2.3.4 Le couplage
électromécanique intrinsèque des matériaux
piézoélectriques
Le couplage électromécanique intrinsèque
d'un matériau piézoélectrique représente son
efficacité à convertir l'énergie mécanique en
énergie électrique et vice versa. Il dépend de la
qualité du matériau et du mode de couplage. Le coefficient de
couplage est souvent mesuré en pourcentage mais il est néanmoins
plus intéressant d'utiliser sa valeur au carré qui est le rapport
des énergies reçue et fournie.
En mode actionneur :
 
En mode générateur :
 
Avec :
  : L'énergie électrique stockée en mode
générateur ou reçue en mode actionneur : L'énergie électrique stockée en mode
générateur ou reçue en mode actionneur
  : L'énergie mécanique emmagasinée en mode
générateur ou fournie en mode actionneur : L'énergie mécanique emmagasinée en mode
générateur ou fournie en mode actionneur
Les expressions ci-haut représentent le coefficient de
couplage intrinsèque. Cependant, dans le cas réel, le
matériau piézoélectrique est souvent connecté
mécaniquement à d'autres matériaux (substrat,
électrodes) qui sont passifs. Par conséquent nous parlerons
plutôt de coefficient de transmission d'énergie qui est le rapport
entre l'énergie fournie et l'énergie reçue par le
système entier. Du fait de la dissipation d'une partie de
l'énergie dans la zone passive du système, le coefficient de
transmission d'énergie sera toujours inférieur au coefficient de
couplage intrinsèque.
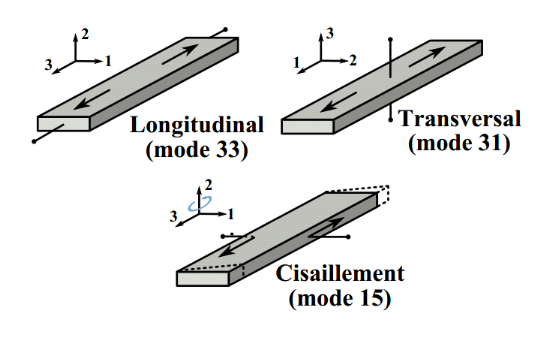
Figure 12 : Les modes de
couplage électromécanique
A part le coefficient de couplage
électromagnétique, il existe aussi le coefficient de transmission
d'énergie  
2.4 Les matériaux piézoélectriques
Il existe 32 classes cristallines parmi lesquelles 20
possèdent des propriétés piézoélectriques,
à ce jour environ 200 matériaux piézoélectriques
sont utilisés pour des applications de récupération
d'énergie, répartis en 4 principales catégories (Covac, et
al., 2020) :
- Monocristaux (sel de Rochelle, niobate de lithium, cristaux
de quartz) ;
- Les céramiques (titanate de baryum
(BaTiO3), (PZT), niobate de potassium (KNbO3)) ;
- Les polymères (l'acide polylactique (PLA),
polyfluorure de vinylidène (PVDF), copolymères, cellulose et
dérivés) ;
- Polymères composites ou nanocomposites (fluorure de
polyvinylidène-oxyde de zinc (PVDF-ZnO), cellulose BaTiO3,
polyimides-PZT).
Ces différents matériaux peuvent
également être classés selon les catégories
suivantes :
- Composé naturel : le quartz, le sel de Rochelle,
la topaze ou encore la tourmaline.
- Composé synthétique : titanate de baryum,
titanate de plomb, niobate de lithium, titanate-zirconate de plomb.
A ce jour les titano-zirconates de plomb (PZT) sont les plus
répandus des matériaux précités et ils
présentent les caractéristiques suivantes :
- Ils présentent un fort effet
piézoélectrique et de faibles pertes diélectriques
- Leurs procédés de fabrication sont simples
- Ils sont compatibles avec les micro systèmes
électromécaniques (MEMS)
- Ils sont néanmoins très toxiques à
cause de la présence de plomb
Le Tableau 2-4 résume les différentes classes de
matériaux utilisés ainsi que leurs
caractéristiques tandis que le Tableau 2-5 compare les deux classes
les plus utilisées que sont les PZT et les PVDF.
|
Type
|
Description et caractéristiques
|
Exemples
|
|
Monocristaux
|
? Leurs propriétés
piézoélectriques exceptionnelles font qu'ils sont très
utilisés pour les capteurs et actionneurs ;
|
? Oxyde de Zinc (ZnO) ;
? Matériaux à base de Niobate de plomb et de
magnésium (PMN) : ex. PMN-PT
|
|
Piézocéramiques à base de Plomb
|
? Matériaux piézocrystalins avec structure
pérovskite ;
? Effet piézoélectrique élevé et
faibles pertes diélectriques
? Procédé de fabrication simple ;
compatible avec les MEMS ;
? Fortement toxique à cause de la présence de
Plomb.
|
? Ce sont surtout des PZT modifiés comme :
Niobate de Plomb et Magnésium-PZT (PMN-PZT), PZT-5A, Oxyde de Zinc
amélioré PZT (PZT-ZnO)
|
|
Les piézocéraiques sans Plomb
|
? Matériaux non-toxiques ;
? Plus faible effet piézoélectrique ;
|
? BaTiO3 ;
? Titanate de Bismuth et de Sodium (BNT-BKT) ;
? Matériaux à base de : Niobate de
potassium et de sodium (KNN) ; LS45, KNLNTS
|
|
Les piézopolymères
|
? Flexibles, non toxiques et légers ;
? Plus faible couplage piézoélectrique que les
piézocéramiques ;
? Faible coût de production ;
? Biocompatible, biodégradable et consomme moins
d'énergie par rapport aux autres matériaux
piézoélectriques.
|
? Sont utilisés dans la fabrication des MEMS
piézoélectriques ;
? Polymères dérivés de Polyfluorure de
vinylidènes (PVDS)
|
Tableau 2-4 : Types et
caractéristiques des matériaux piézoélectriques
(Covac, et al., 2020)
|
Paramètres
|
Céramiques piézoélectriques
(PZT)
|
Polymères piézoélectriques
(PVDF)
|
|
Piézoélectricité
|
Forte
|
Faible
|
|
Masse volumique typique(103 kg m-3)
|
7.5
|
1.78
|
|
Permittivité relative ( 
|
1200
|
12
|
|
Constante de charge piézoélectrique
(10-12 C N-1)
|
|
|
|
Constante de tension piézoélectrique
(10-3 V m N-1)
|
  , ,  
|
  , ,  
|
|
Flexibilité mécanique
|
Faible
|
Forte
|
|
Température de Curie (oC)
|
386
|
80
|
Tableau 2-5 : Comparatif
entre les polymères et céramiques
piézoélectriques
2.5 Etude de la structure de la structure de
récupération d'énergie
Il existe différentes dispositions des transducteurs
piézoélectriques utilisés dans les systèmes de
récupération d'énergie vibratoire à
savoir :
- Poutre en porte-à-faux (cantilever beam) cf. Figure
13
- Diaphragme circulaire (circular diaphragm) cf. Figure 14
- Cymbale (cymbal type) cf. Figure 15
- Pile (stack type) Figure 16
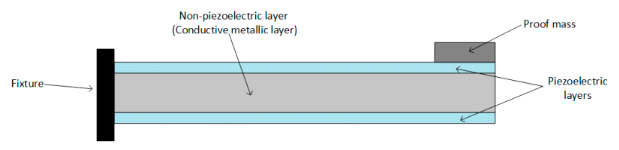
Figure 13 : Poutre en
porte-à-faux (cantilever beam)
C'est la structure la plus répandue pour les
transducteurs des récupérateur d'énergie
piézoélectrique à cause de sa géométrie
simple et la génération de déformations importantes. Elle
se compose d'une (ou deux) fine couche piézoélectrique et d'un
matériau conducteur non-piézoélectrique encastré
d'une part et libre de l'autre. La structure est dite unimorphe lorsqu'une
seule couche piézoélectrique est utilisée et bimorphe
lorsqu'il y en a deux. La configuration en bimorphe est particulièrement
intéressante car elle permet de doubler l'énergie
électrique récoltée sans grande modification de volume
occupé par le système.
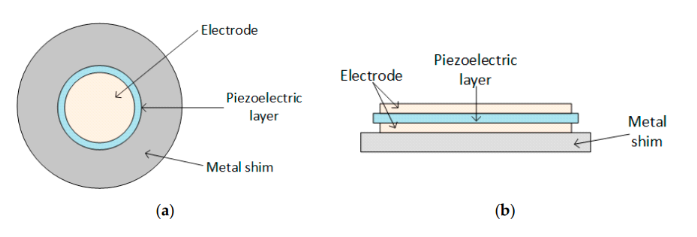
Figure 14 : Transducteur
en diaphragme circulaire : (a) Vue de face ; (b) Vue de profil
La structure en diaphragme circulaire se compose d'une fine
couche piézoélectrique en forme de disque attachée
à une cale métallique fixée sur les bords de la bague de
serrage, comme illustré à la Figure 14. Au coeur du diaphragme
est attaché une masse d'épreuve pour intensifier les performances
en fonctionnement à basse fréquence et pour améliorer la
puissance de sortie.
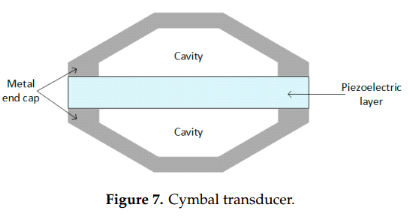
Figure 15 : Transducteur
en cymbale
La structure en cymbale consiste en une couche
piézoélectrique placée entre deux embouts
métalliques de chaque côté (Figure 15), cette structure est
très utile dans des applications avec de grandes charges à
supporter. Lorsqu'une contrainte axiale sur les embouts métalliques, la
contrainte est amplifiée et convertie en contrainte radiale, avec pour
conséquence un plus grand coefficient piézoélectrique, ce
qui conduit à la génération d'une grande quantité
de charges électriques.
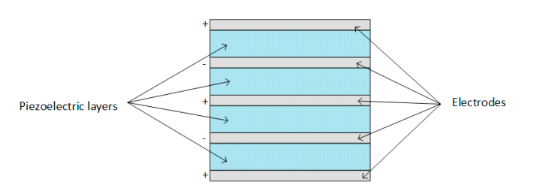
Figure 16 : Transducteur
piézoélectrique en pile (stack)
Les transducteurs piézoélectriques en pile se
composent de plusieurs couches piézoélectriques empilées
les unes sur les autres de sorte que la direction de polarisation des couches
s'aligne avec la force appliquée (comme illustré à la
Figure 16), et sont utilisés dans des applications qui exigent une haute
pression.
|
Type de configuration
|
Avantages
|
Inconvénients
|
|
Poutre en porte-à-faux (unimorphe/bimorphe)
|
- Structure simple
- Faible coût de fabrication
- Faible fréquence de résonance
- Facteur de qualité mécanique
élevé
|
- Incapacité de résister à de grandes
charges
|
|
Diaphragme circulaire
|
- Compatible avec des applications faisant intervenir de
grandes pressions
|
- Grandes fréquences de résonance
- Rigidité élevée
|
|
Cymbale
|
- Energie récoltée élevée
|
- Limité à des applications qui
nécessitent une grande amplitude de la source de vibration
|
|
Pile
|
- Supporte de grandes charges mécaniques
- Convient à des applications de haute pression
|
- Grande rigidité
|
Tableau 2-6 : Avantages et
inconvénients des différentes configurations de transducteur
piézoélectrique
2.6 Choix et descriptions
2.6.1 Description de l'environnement de
fonctionnement
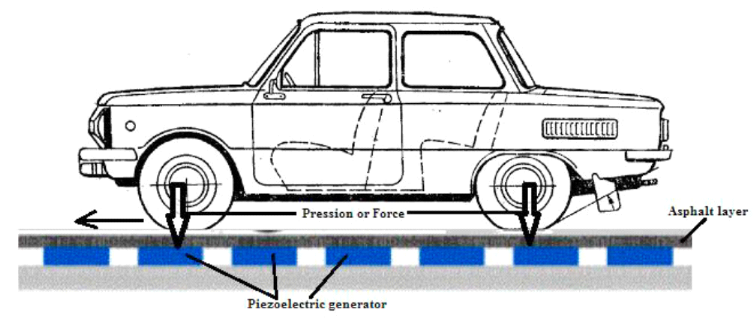
Figure 17 : Environnement de
travail et disposition
Comme le laisse penser le titre du travail, le
générateur devra être soumis à la charge des
véhicules passant sur la route. Ainsi nous devons caractériser le
comportement de l'asphalte sur le dispositif récupérateur en
fonction du trafic. Commençons par séparer les véhicules
en deux groupes : les petits véhicules (quatre roues) et les gros
véhicules (camions et bus).
Pour faciliter l'analyse, on supposera que la pression de
contact entre le pneu et l'asphalte est égale à la pression
interne du pneu et la forme de l'aire de contact est circulaire. Pour les
petits véhicules la pression varie entre 0.2 et 0.25 MPa et pour les
gros véhicules elle varie à partir de 0.5 MPa. La valeur typique
choisie sera de 0.7 MPa.
L'idéal serait de poser le dispositif au plus
près possible de la surface de sorte à récolter le maximum
d'énergie possible car la contrainte verticale se dissipe avec la
profondeur; mais il est tout de même difficile de placer un tel
dispositif en contact immédiat avec la surface de l'asphalte. Il est
plutôt recommandé (ZHAO, et al., 2012) d'être placé
à 4 cm sous la surface car à cette profondeur la contrainte est
environ égale à 90% de celle à la surface.
Sachant que l'asphalte présente une certaine
élasticité, son module d'élasticité varie 1000 et
4000 MPa selon la température (ZHAO, et al., 2010). On sait
également qu'un très grand nombre de véhicule de
différentes vitesses traversent l'asphalte chaque jour, la
fréquence de la charge sur le PEH (Piezoelectric energy
harverster) dépend de la vitesse des véhicules et du volume
du trafic. On estime en moyenne la fréquence dans la bande de
fréquence allant de 0.1 Hz à 50 Hz (ZHAO, et al., 2012).
Le système devra également résister
à la température élevée que peut atteindre
l'asphalte qui peut atteindre jusqu'à 85oC dans notre zone
climatique (Adwan, et al., 2021). La crainte ici est que les matériaux
perdent leurs propriétés piézoélectriques suite au
dépassement de leur température de Curie. Sans omettre son
étanchéité car l'infiltration de l'eau augmente
considérablement le risque de court-circuit.
2.6.2 Choix de la structure et des
matériaux
La structure piézoélectrique joue un rôle
important dans la conception du générateur car une structure
inappropriée pourrait au mieux être très inefficace et
engendrer d'énormes pertes dans le PEH, et au pire se rompre sous les
lourdes charges à supporter.
Comme dit à la section 2.3, la configuration de poutre
est la plus utilisée dans les récupérateurs
piézoélectriques vu sa simple structure et son bon facteur de
qualité mécanique. Cependant pour une voie routière il est
plutôt important de considérer le fait que la structure doit en
plus d'un bon facteur de qualité mécanique, supporter des charges
importantes et donc être beaucoup plus robuste.
Si quelques travaux semblaient privilégier la structure
en cymbale (ZHAO, et al., 2010), d'autres encore une structure cylindrique
(Yang, et al., 2020) la plupart des travaux depuis lors tendent à
privilégier la structure dite en pont (souvent décrite par sa
traduction anglaise bridge) qui est en réalité une
amélioration de la structure cymbale car pour les mêmes
matériaux utilisés et soumis à une même contrainte,
la configuration en pont présente une plus grande quantité
d'énergie récoltée (Wang, et al., 2019).
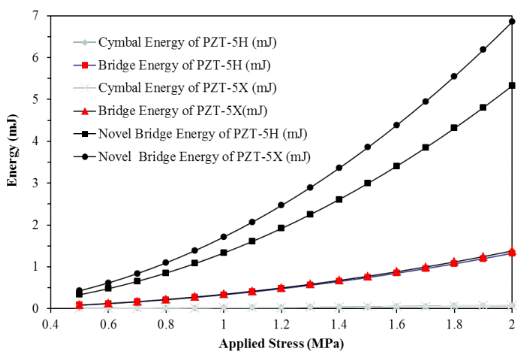
Figure 18: Comparaison des
performances des structures cymbale et en pont

Figure 19 : Transducteur
en pont
La structure devra donc être en pont car remplissant au
mieux les contraintes liées à l'environnement de travail et
à l'efficacité recherchée.
2.6.3 Choix des matériaux
En y regardant de près les structures décrites
à la section on peut apercevoir que dans chaque configuration il est
question de lier des matériaux piézoélectriques
appelés matériaux actifs (en bleu) avec des matériaux
non-piézoélectriques dits passifs (en gris). Le matériau
passif utilisé doit en même temps avoir un bon facteur de
qualité mécanique pour minimiser les pertes d'énergie mais
aussi être conducteurs d'électricité. En effet les charges
électriques apparues à la surface du matériau
piézoélectrique y sont recueillies à travers les
matériaux passifs. La partie passive d'une structure
piézoélectrique est appelé substrat.
2.6.3.1 Choix du
matériau du substrat
Le substrat (matériau passif non couplé) : en
général le substrat est utilisé pour augmenter le couplage
mécano-mécanique, c'est-à-dire amplifier le
déplacement relatif de la masse sismique par rapport à
l'amplitude de déplacement de la source de vibration. En effet, ce
matériau est choisi pour avoir le meilleur facteur de qualité
mécanique possible.
Le choix du matériau du substrat s'articule autour de
quatre points essentiels :
? Le facteur qualité mécanique (Qm): il est
inversement proportionnel aux pertes
mécaniques dans le
matériau considéré. On cherche toujours à obtenir
le
meilleur facteur de qualité possible afin de minimiser les
pertes.
? Le module d'Young (Y): les structures que nous cherchons
à dimensionner sont
destinées à travailler dans des
milieux à basses fréquences (< 50 Hz), donc le
mieux est de
choisir un matériau dont la raideur ne sera pas très grande afin
de
pouvoir atteindre ces fréquences de résonance pour des
structures de tailles
centimétriques.
? La masse volumique ( ñ ) : une forte masse volumique
permet d'obtenir une
grande masse effective à petit volume, et donc
une faible fréquence de
résonance.
? Une conductivité électrique suffisante s

Voici le Tableau 2-7 qui compare les matériaux les plus
utilisés comme substrat
|
Type de matériau
|
|
Y[N.cm-2]
|
ó [106 S.m-1]
|
Q
|
  [10-7] [10-7]
|
|
Laiton
|
8.5
|
110
|
15,9
|
20
|
159
|
|
Acier
|
7.5
|
210
|
5,9
|
40
|
59
|
|
Silicium
|
2.3
|
135
|
400
|
150
|
10320
|
|
Quartz
|
2.6
|
100
|
10-22
|
104
|
265.10-9
|
Tableau 2-7 : Comparatif des
principaux matériaux utilisées comme substrat
De ce tableau on peut tirer les conclusions suivantes :
- Le Quartz n'est clairement pas une option envisageable vu la
très faible valeur obtenue ;
- Le silicium présente un meilleur facteur de
mérite, il faut toutefois ne pas omettre son coût de fabrication
qui reste relativement élevé ;
- Le laiton quant à lui présente une bonne
valeur obtenue, et un coût de fabrication raisonnable ;
- Enfin l'acier présente de bonnes performance et vu
son coût de fabrication peu élevé il est très
répandue dans les structures PEH
Remarquons la corrélation entre la valeur obtenue et la
conductivité électrique, c'est le matériau avec la
meilleure conductivité électrique qui l'emporte vu le grand
facteur multiplicateur qu'elle implique. Cette façon de voir les choses
ne fais pas l'unanimité dans la communauté scientifique et on a
tendance à ne pas inclure la résistivité dans les figures
de mérite de choix des matériaux piézoélectriques
car elle s'impose de par sa valeur.
Pour la suite de notre travail, nous utiliserons le laiton comme
matériau du substrat car en plus d'être bon conducteur
d'électricité il possède une bonne résistance
à l'usure et à la corrosion.
2.6.3.2 Le choix du
matériau piézoélectrique
Le choix du matériau piézoélectrique
dépend grandement de l'application que nous cherchons à
réaliser. Dans notre cas, pour maximiser la portion d'énergie
mécanique convertie on aura besoin d'un fort couplage
électromécanique. Le choix du matériau
piézoélectrique se base donc sur les paramètres
intrinsèques suivants :
? Le couplage
électromécanique [k33]
? Les pertes diélectriques [tan  ] : les pertes diélectriques dépendent du type de
matériau piézoélectrique, elles doivent être
minimisées. ] : les pertes diélectriques dépendent du type de
matériau piézoélectrique, elles doivent être
minimisées.
? La constante diélectrique [  ] : d'après la loi de Gauss, pour avoir un
champ ] : d'après la loi de Gauss, pour avoir un
champ
électrique important aux bornes du matériau
piézoélectrique, il est nécessaire
d'avoir un
matériau avec une faible permittivité diélectrique.
Cependant, choisir
un matériau avec une faible permittivité
diélectrique implique une faible capacité
électrique
entre les électrodes du piézoélectrique, ce qui posera
problème pour la gestion de l'énergie électrique. Il est
donc nécessaire de trouver le bon compromis entre les différents
effets.
? La raideur des matériaux
piézoélectriques ou le module d'Young   : :
un matériau piézoélectrique à
faible raideur aide à obtenir des basses fréquences
de
résonance. Cependant, il faut que la raideur des couches
piézoélectriques ne
soit pas négligeable devant celle
du matériau du substrat utilisé afin que
l'essentiel de
l'énergie mécanique soit bien stockée dans le
matériau
piézoélectrique qui est lui
électriquement couplé.
? Le facteur de qualité (Qm): le facteur de
qualité d'une structure mécanique
dépend de celui de la
partie passive et celui de la partie active de la structure. Il
est donc
important de choisir un matériau piézoélectrique avec le
meilleur
facteur qualité possible en fonction de volume afin de
minimiser au mieux les
pertes mécaniques dans la structure.
Pour le choix du matériau piézoélectrique
nous utiliserons la figure de mérite reprise par Defosseux (Defosseux,
2011)
|
Matériau
|
|
  (10-12 m/V) (10-12 m/V)
|
|
|
|
Quartz
|
4.5
|
0.727
|
-
|
|
|
Soft PZT
|
4100
|
-260
|
2.7
|
6.1
|
|
Hard PZT
|
1350
|
-109
|
0.35
|
25
|
|
PMN-PT
|
4200
|
-930
|
0.4
|
514
|
|
AIN
|
10
|
2.625
|
0.1
|
6.9
|
|
ZnO
|
11
|
5.1
|
|
|
|
PVDF
|
13
|
1
|
-
|
|
Tableau 2-8 : Figures de
mérite de quelques matériaux
piézoélectriques
De ce tableau se démarque clairement les monocristaux
à base de Niobate de plomb et de magnésium PMN-PT, ils sont
toutefois très cher à fabriquer par rapport aux
piézocéramiques. C'est pour cette raison que nous utiliserons les
piézocéramiques de la famille des Hard PZT, en particulier le
PZT-4.
Les dimensions de transducteurs
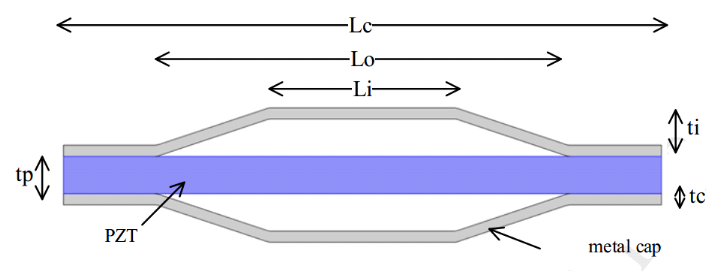
Figure 20 : Dimensions des
transducteurs utilisés dans le module
Ces données sont issues d'essais en laboratoire
effectués dans les travaux de Jasmin at Wang (Jasim, et al., 2017). La
longueur dans la 3ème dimension est de 32 mm.
|
Notation
|
Valeur [mm]
|
|
Lc
|
32
|
|
tp
|
2
|
|
L0
|
21.5
|
|
ti
|
2.72
|
|
tc
|
0.4
|
|
Li
|
9.72
|
Tableau 2-9 : Dimensions du transducteur
récupérateur
Les propriétés du laiton choisi (laiton
de décolletage)
Sa composition :
Cu : 60 -63 %
Zn : 35.5 %
Pb : 2.5-3.7 %
Fe : Maximum 0.35 %
Les propriétés physiques
Contrainte ultime : 338 - 469 MPa
Limite d'élasticité : 124 - 310 MPa
Elongation à la rupture : 53%
Module d'élasticité : 97 GPa
Coefficient de Poisson : 0.31
Les propriétés physiques du
PZT-4
La masse volumique

La souplesse (compliance)

La constante de charge

La permittivité relative
Avec  
2.6.4 Le module
piézoélectrique
Comme pour l'énergie solaire, où le
générateur se compose de modules regroupant des cellules
photovoltaïques connectées électriquement ; il est de
même avec un générateur piézoélectrique. Un
module piézoélectrique se compose de plusieurs transducteurs
connectés électriquement et regroupés dans une structure
pouvant supporter les charges.
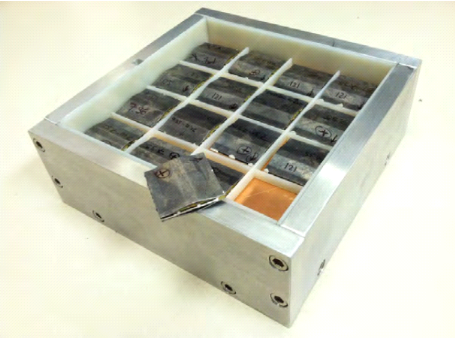
Figure 21 : Module
piézoélectrique avec transducteurs en pont (Wang, et al.,
2019)
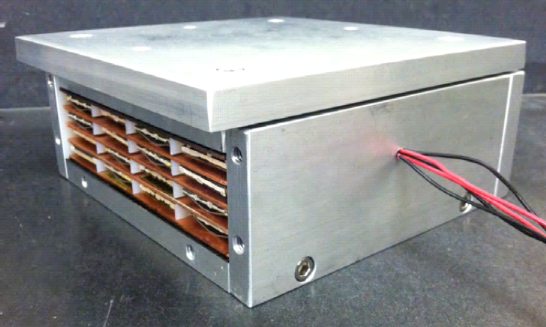
Figure 22 : Module
piézoélectrique avec liaisons électriques
effectuées
Le module des Figure 21 et Figure 22 a été
utilisé dans les travaux de Wang (Wang, et al., 2019) mais cette fois
avec pour matériau piézoélectrique le PZT-5H, il se
compose de 64 transducteurs regroupés dans un boitier en aluminium. Les
transducteurs sont isolés les uns des autres par du nylon. Il fait 17.8
cm en long et en large, avec une hauteur de 7.6 cm.
? Hypothèses de fonctionnement
- Le module est en permanence soumis à une
sollicitation périodique
- A 40 mm sous la surface, la totalité de
l'énergie due au frottement à la surface est transmise au
module.
Pour estimer la puissance fournie par le
générateur on supposera un environnement suivant :
- Un trafic dense de 3 Hz est considéré, Soit
259200 passages par jour
- Une vitesse de 70 km/h ;
- Une masse typique par véhicule de 1600 kg soumise
à l'accélération de la pesanteur de 1g ;
On calcule premièrement la puissance mécanique
à chaque passage :


Avec :
Fr : la force de frottement
Cr : le coefficient de frottement

Le temps de passage d'un véhicule sur un module de 17.8 cm
de long sera de :
On peut alors calculer l'énergie mécanique
reçue par la formule :

En considérant que les essais en laboratoire ont
montré que le coefficient de transmission d'énergie pour un
système avec transducteur en pont est de 0.078 (Jasim, et al.,
2017) ; évaluons l'énergie électrique
récoltée :

Sachant que 1J vaut 2.7778*10-7 kWh on déduit
la puissance électrique générée à chaque
passage de véhicule sur un module en considérant les 4
niveaux:

En multipliant par le nombre de véhicule par jour on
obtient :
 
En calculant pour 1 km avec un espacement de 7 cm entre les
modules on obtient une énergie de

Pour des lampes de 100W fonctionnant 12 h/24 soit 0.72 kWh/jour
le système est capable d'alimenter 176 lampes.
La tension récupérée doit être
redressée et régulée avant d'être stockée.
Les lampes étant destinées à fonctionner de
nuit, l'énergie récoltée est stockée pour sa
réutilisation ultérieure. Les études sur le sujet
démontrent que les batteries rechargeables ne sont pas adéquates
pour le stockage de l'énergie piézoélectrique (Nyamayoka,
et al., 2018). On privilégie plutôt les super condensateurs pour
les raisons suivantes :
- Le nombre de charge et de décharge est quasiment
illimité pour les super condensateurs ;
- Le temps de charge est très court ;
- Les super condensateurs sont peu influencés par les
conditions environnementales diverses auxquelles elles seront exposées
pour de telles applications.
CHAPITRE 3 ETUDE ET MODELISATION DU
SYSTEME
Ce chapitre aura pour objectif la mise en lumière des
paramètres majeurs qui influent sur la performance d'un
récupérateur d'énergie vibratoire utilisant la
transduction piézoélectrique. Pour cela on établira le
modèle général d'un générateur
d'énergie vibratoire, duquel on déduira les facteurs favorisant
une optimisation de la puissance de sortie.
3.1 Présentation du logiciel utilisé
MATLAB (« matrix
laboratory ») est un
langage de
script émulé par un
environnement
de développement du même nom ; il est utilisé
à des fins de
calcul
numérique. Développé par la société
The
MathWorks,
MATLAB permet de manipuler des matrices, d'afficher des courbes et des
données, de mettre en oeuvre des algorithmes, de créer des
interfaces utilisateurs, et peut s'interfacer avec d'autres langages comme
le
C,
C++,
Java, et
Fortran. Les utilisateurs
de MATLAB (environ 4 millions en 2019) sont de milieux très
différents comme l'ingénierie, les sciences et l'économie
dans un contexte aussi bien industriel que pour la recherche. Matlab peut
s'utiliser seul ou bien avec
des toolboxes (« boîte à
outils »).
3.2 Modélisation du module
générateur
Comme vu au CHAPITRE 1 ; le récupérateur
d'énergie se modélise par un déplacement relatif d'une
masse par rapport à une source de vibration. Ce modèle
proposé pour la première fois par (Williams, et al., 1996) est
à ce jour le plus utilisé dans ce domaine de recherche.
Le modèle est constitué d'une masse sismique
m, sur un ressort k. Lorsque générateur vibre,
la masse se meut de manière décalée par rapport à
la source de vibration. Il existe alors un mouvement relatif entre la masse
sismique et la source de vibration ; c'est de ce déplacement que le
transducteur génère l'énergie électrique. Ici le
transducteur est représenté sous forme d'un amortisseur
d, qui suite à la conversion électromécanique
amorti la masse sismique.
Ce modèle est applicable pour tous les trois types de
transducteurs vus :
- Piézoélectrique : On utilise un
matériau piézoélectrique qui converti en
électricité la tension du ressort ;
- Electromagnétique : Un aimant attaché
à la masse induit par son mouvement une tension au bornes d'une
bobine ;
- Electrostatique : La disposition dans une masse d'un
électret avec une charge permanente induit une tension aux bornes du
condensateur suite à ce déplacement.
L'amortisseur ainsi représenté possède
une composante mécanique ainsi qu'une composante électrique due
à la conversion d'énergie mécanique en
électricité.
Avec   le déplacement de la masse sismique par rapport à sa
position initiale et le déplacement de la masse sismique par rapport à sa
position initiale et   le déplacement relatif de la masse par rapport au boitier (la
boitier effectuant un mouvement en phase avec l'écxitation). le déplacement relatif de la masse par rapport au boitier (la
boitier effectuant un mouvement en phase avec l'écxitation).
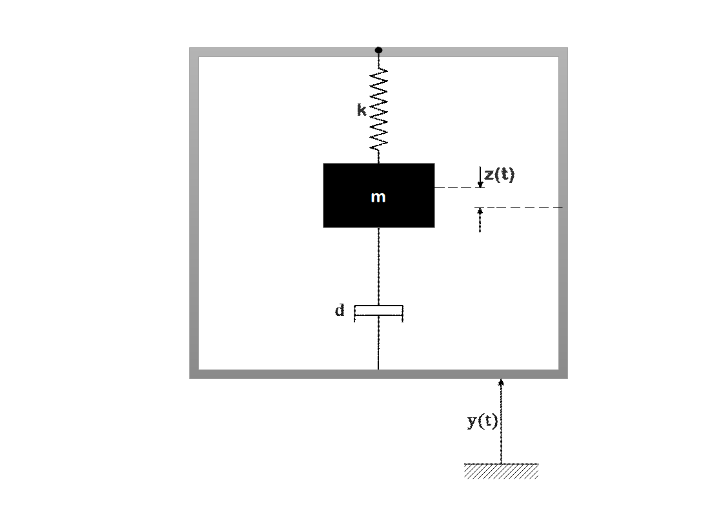
Figure 23 : Modèle
de Williams et Yates
Voici à présent son diagramme de corps libre (
Figure 24)
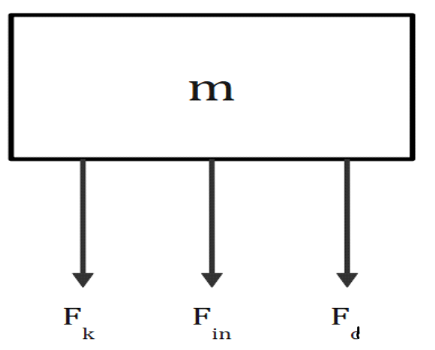
Figure 24 : Diagramme de
corps libre du modèle
On souhaite évaluer le déplacement relatif que
subit la masse en fonction du signal d'excitation.
On définit les forces d'amortissement   et de rappel du ressort et de rappel du ressort   qui respectivement subissent les effets cumulés de vitesse et de
longueur. qui respectivement subissent les effets cumulés de vitesse et de
longueur.
Sachant que la masse subit un déplacement de d'amplitude
x suite à l'excitation :

En appliquant la seconde loi de Newton on obtient :


On note   le déplacement relatif de masse m le déplacement relatif de masse m


En considérant que le système est soumis à
un signal d'excitation périodique on peut alors alors passer dans le
domaine de Laplace pour étudier l'évolution fréquentielle
du système, tout en considérant les deux composantes de
l'amortissement.



Avec   ; évaluons la fonction de transfert. ; évaluons la fonction de transfert.

Avec   la pulsation propre du système la pulsation propre du système   le facteur de qualité mécanique et le facteur de qualité mécanique et   le facteur de qualité électrique : le facteur de qualité électrique :
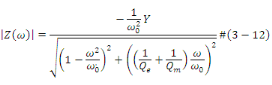
Cette expression du module de Z en fonction de la pulsation
permet de démontrer l'influence des facteurs   (d'où son apparition lors du choix des matériaux dans le
chapitre précédant) et (d'où son apparition lors du choix des matériaux dans le
chapitre précédant) et   . Le facteur de qualité mécanique est imposé par la
structure et les matériaux utilisés tandis que le facteur de
qualité électrique peut quant à lui être
varié en fonction de la résistance de charge du matériau
piézoélectrique. Le déplacement Z est fonction donc des
deux facteurs de qualité et la puissance récoltée est
elle-même fonction de ce déplacement comme le démontre les
expressions suivantes. . Le facteur de qualité mécanique est imposé par la
structure et les matériaux utilisés tandis que le facteur de
qualité électrique peut quant à lui être
varié en fonction de la résistance de charge du matériau
piézoélectrique. Le déplacement Z est fonction donc des
deux facteurs de qualité et la puissance récoltée est
elle-même fonction de ce déplacement comme le démontre les
expressions suivantes.
L'équation 3-7 peut être réécrite
comme suit :

Avec :
  : le facteur d'amortissement de la structure : le facteur d'amortissement de la structure
En passant dans le domaine de Laplace on obtient :


Partant de la fonction de transfert on tire le module de
Z :
Simulons à présent cette équation dans
Matlab, pour un élément du module
piézoélectrique :
- La masse vibrante est calculée en connaissant les
dimensions de l'élément récupérateur ainsi que ses
propriétés physiques
- La pulsation d'excitation est prise en fonction du trafic
estimé à 3 Hz
Les données du script ont été
calculés de la manière suivante :
- Connaissant les dimensions des masses nous avons
calculé le volume des masses métalliques en laiton que nous avons
multiplié par la masse volumique ;
- Avec la pulsation et la masse connue, nous avons
calculé la raideur de la masse vibrante ;
- Avec masse et raideur connus ainsi que le coefficient
Qm pour le PZT-4, nous avons calculé l'amortissement d
- Avec le module d'élasticité du laiton et la
contrainte appliquée connue, on a déduit l'amplitude de
l'excitation.
%%%%%%%%%
% Script de l'étude fréquentielle du
déplacement
% L'objectif est de démontrer le comportement
fréquentiel du déplacement
% relatif de la masse, et doc le comportement de la puissance
dans le
% domaine fréquentiel
%%%%%%%%%
% Mike Kapapa
%%%%%%%%%
clc
clear
close
Détermination des paramètres
Y = 0.00072;
%l'amplitude de l'éxcitation [m]
k = 2.4764; %la raideur du
matériau vibrant [N/m]
m = 0.00697; %la masse du
matériau vibrant [kg]
w0 = sqrt (k/m) %la pulsation de
résonance [rad/sec]
w = linspace((w0/1.5),(1.5*w0),100); %la variation de la
pulsation d'éxcitation
d = 0.0002875; %la valeur de
l'amortisement
w0 = 18.8492
Calcul du déplacement
zeta = d/(2*sqrt(k*m));
z = ((w.^2).*Y)./(sqrt((w0.^2-w.^2).^2)+(2.*zeta.*w0.*w).^2); %le
déplacement relatif de la masse en mètre
frqc = w0/(2*pi) %la fréquence de
passage des véhicules
plot (w,z)
grid on
Zres = find (z==max(z))
wres = w(Zres) %la pulsation correspondant
au maximum de puissance
xlabel ('la pulsation')
ylabel ('le déplacement')
frqc = 3.0000
Zres = 41
wres = 18.9127
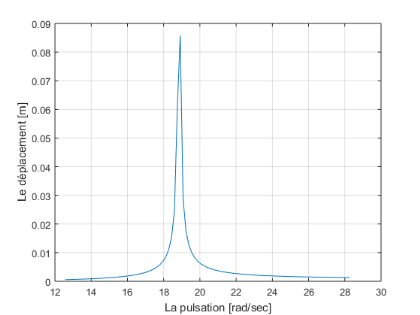
Figure 25 :
évolution fréquentielle du déplacement relatif de la masse
sismique
On remarque clairement sur le graphe de la Figure 25 les
observations suivantes :
- Il y a une nette augmentation de l'amplitude de
déplacement relatif à la résonance
- Moins la fréquence est grande moins le
déplacement est important. D'où l'intérêt de placer
des modules piézoélectriques à des lieux très
fréquentés, ce qui a pour conséquence directe une
augmentation de fréquence.
Nous pouvons maintenant calculer la puissance
récupérée, c'est-à-dire la puissance qui
est
dissipée du système mécanique par l'amortissement
électrique. La puissance dissipée par
l'amortissement
mécanique correspond à de la puissance perdue. La puissance
récupérée est
égale à la force de
viscosité électrique multipliée par la vitesse de
déplacement :

En considérant une fonction sinusoïdale comme
signal d'excitation et partant de l'équation (3-20) on peut
déduire la forme temporelle de l'excitation :


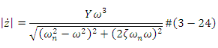
La puissance récoltée devient alors :
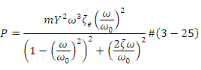
Avec   le coefficient d'amortissement du système. le coefficient d'amortissement du système.
A la pulsation, lorsque   l'expression de P devient : l'expression de P devient :
En théorie, un coefficient d'amortissement du
système de zéro pourrait générer une puissance
infinie à la résonance, mais en pratique cela est impossible
juste de par le choix du matériau un coefficient d'amortissement
existera.
Cette expression de la puissance fait ressortir les faits
importants suivants :
- La puissance électrique maximale théorique que
peut générer un module est directement proportionnel au cube de
la fréquence d'excitation
- La puissance est directement proportionnelle au carré
de l'amplitude des déplacements imposés par la charge,
d'où l'intérêt des routes plutôt que des voies
piétonnes.
- La puissance récoltée est fonction du
matériau choisi, de sa conception et de sa géométrie car
le coefficient d'amortissement global   de la structure en dépend ; de la structure en dépend ;
- La puissance récoltée ne varie pas de
manière linéaire par rapport à la charge
appliquée ;
- La puissance récoltée est maximale à la
résonance, en même temps elle est grande à de
fréquences élevées.
CONCLUSION
En début de travail nous nous sommes fixé pour
objectif la mise au point d'un dispositif capable de générer une
énergie électrique à partir de l'énergie
vibratoire. Notre sujet, portant sur le dimensionnement ainsi que la mise en
lumière des conditions optimales de fonctionnement du
générateur placé sous la première couche d'asphalte
conçu à travers l'analyse et la simulation du modèle par
Matlab.
L'objectif assigné étant d'obtenir une
configuration permettant l'alimentation électrique des lampes pour
l'éclairage public. Pour cela nous avons énoncé les
conditions de fonctionnement ainsi que les performances recherchées.
Nous avons passé en revue les différents choix à notre
disposition à chaque niveau de sorte à obtenir un module
correspondant aux attentes fixées.
Premièrement nous avons utilisé la configuration
en pont pour son bon coefficient de couplage électromécanique,
son bon coefficient de transfert d'énergie et sa résistance aux
lourdes charges. Nous avons choisi un module de 64 transducteurs
récupérant une énergie journalière de 3.17   ce qui est suffisant pour alimenter plusieurs lampes pour une
installation le long d'un kilomètre de route très
fréquenté. ce qui est suffisant pour alimenter plusieurs lampes pour une
installation le long d'un kilomètre de route très
fréquenté.
Secondement on a modélisé notre module puis
simulé son fonctionnement partant des données de terrain et
liées au matériel utilisé lors du dimensionnement. De
cette étude nous avons conclu la nécessité pour le
système de fonctionner à de grandes fréquences, mais aussi
on constate une nette augmentation de la puissance électrique
générée lors de la résonance.
Cette énergie est donc très prometteuse
lorsqu'elle est utilisée dans les conditions optimales. Quant au
stockage de l'énergie électrique générée,
les super condensateurs sont les mieux adaptés par rapport aux batteries
rechargeables pour l'énergie piézoélectrique car ils
présentent un temps de très court temps de recharge et sont moins
dépendants des conditions de l'environnement par rapport aux batteries
électrochimiques rechargeables.
Actuellement plusieurs projets sont menés sur le sujet
mais surtout sur la récupération de petites quantité
d'énergie pour l'alimentation de noeuds. La documentation sur notre
sujet n'est pas légion surtout pour des applications à grande
échelle, encore moins dans le monde francophone.
En guise de perspective, plusieurs questions essentielles
restent en suspens comme l'adaptation en fréquence du module car en
réalité la densité de trafic varie avec la vitesse et le
type de véhicule. Le système implémenté devra
adapter sa pulsation propre en conséquence. Mais aussi des questions
essentielles comme la durée de vie restent à étudier.
Bibliographie
Adwan Ibrahim [et al.] Asphalt Pavement
Temperature Prediction Models: A Review [Revue]. - [s.l.] : MDPI,
2021.
Ahmed-Seddik Bouhadjar Systèmes de
récupération d'énergie vibratoire large bande
[Ouvrage]. - Grenoble : Université de Grenoble, 2012.
Carlioz Louis Générateur
piézoélectrique à déclenchement
thermo-magnétique [Ouvrage]. - Grenoble : Institut
Polytechnique de Grenoble, 2009.
Covac Corina et Gontean Aurel Piezoelectric
Energy Harvesting Solutions: A Review [Revue]. - Timisoara :
Politehnica University Timisoara, 2020.
Defosseux Maxime Conception et
caractérisation de microgénérateurs
piézoélectriques pour microsystèmes autonomes
[Ouvrage]. - Grenoble : Université de Grenoble, 2011.
Department of Economic and Social A?airs, Population
Division World Population Prospects 2019: Highlights [Rapport]. -
[s.l.] : United Nations, 2019.
Durou Hugo Vers l'autonomie
énergétique des réseaux de capteurs embarqués :
conception et intégration d'un générateur
piézoélectrique et d'un micro dispositif de stockage capacitif en
technologie silicium [Ouvrage]. - Toulouse : Université Paul
Sabatier - Toulouse III, 2010.
Erturk Alper et Inman Daniel J. PIEZOELECTRIC
ENERGY HARVESTING [Ouvrage]. - [s.l.] : John Wiley & Sons, Ltd,
2011.
HOANG Thien Dispositif de
récupération d'énergie piézoélectrique :
modélisation, fabrication et caractérisation [Ouvrage]. -
Tours : Université de Tours, 2019.
Ilyes Yahia-Berrouiguet ETUDE ET CONCEPTION
D'UNE MICRO POUTRE POUR GENERER DE [Ouvrage]. - Tlemcen :
Université ABOU BEKR BELKAID, 2017.
INNOWATTECH Innowattech Alternative Energy
Harvesting System [En ligne] // Youtube. - 2010. - 10 06
2021. - https://www.youtube.com/watch?v=KW-GxSFSy3w.
Iqba Muhammad [et al.] Vibration-based
piezoelectric, electromagnetic, and hybrid energy harvesters for microsystems
applications: A contributed review [Revue]. - [s.l.] : wiley online
library, 2020.
Jasim Abbas [et al.] Optimized design of layered
bridge transducer for piezoelectric energy harvesting from roadway
[Ouvrage]. - [s.l.] : Energy, 2017.
JUSTEAU Camille Développement et
optimisation d'une synthèse hydrothermale de nanofls de ZnO, pour la
fabrication industrielle de nanogénérateurs
piézoélectriques [Ouvrage]. - Tours : Université
de Tours, 2020.
Mari D. Transducteurd et capteurs 1
[Article]. - [s.l.] : Ecole polytechnique fédérale de
Lausanne, 2011.
Nyamayoka Lumbumba Taty-Etienne, Zhang Lijun et Wia
Xiaohua Feasability study of embedded piezoelectric generator system
on a highway for street lights electrification [Revue]. - [s.l.] :
ELSEVIER, 2018.
VASIC Dejan et COSTA François
Applications des éléments piézoélectriques en
électronique de puissance [Revue]. - [s.l.] : Techniques de
l'Ingénieur, 2012.
Wang Hao [et al.] Performance Analysis of
Piezoelectric Energy Harvesting in Pavement: Laboratory Testing and Field
Simulation [Revue]. - [s.l.] : Rutgers University, 2019.
Williams C.B. et Yates R.B. Analysis of a
micro-electric generator for microsystems [Revue]. - sheffield :
Elsevier Science S.A, 1996. - 10924-4247(95) 01099-4.
Yang Hailu [et al.] Numerical Analysis of Signal
Response Characteristic of Piezoelectric Energy Harvesters Embedded in Pavement
[Revue]. - Beijing : mdpi, 2020.
Yildirim Tanju [et al.] A review on performance
enhancement techniques for ambient vibration energy harvesters
[Ouvrage]. - [s.l.] : Renewable and Sustainable Energy Reviews,
2017.
ZHAO Hongduo, LING Jianming et YU Jian A
comparative analysis of piezoelectric transducers [Revue]. -
Shanghai : Journal of the Ceramic Society of Japan, 2012. - 120 [8]
317-323 2012.
ZHAO Hongduo, YU Jian et LING Jianming Finite
element analysis of Cymbal piezoelectric transducers [Revue]. -
Shanghai : Journal of the Ceramic Society of Japan, 2010. - 118 [10]
909-915 2010.
| 

