Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
??2
???? = -??????(???? - )??????
????
??2 ?????? (IV.13)
???? = ??????(????-??????+ ??
???? ????
L'équation des tensions rotorique deviens :
??2)????????
??????= ?????????? + (???? ???? + ????
????
??2)???????? (IV.14)
??????
?????????? + (????-???? + ????
????
Après avoir mis en place une transformation de la place
ont obtient :
??2
(???? + (???? - )??) ?????? = ?????? - ????
????
??2
???? + (???? - )??) ?????? = ?????? - ????
????
|
(IV.15)
|
|
Avec :
?????? =
1
2 (?????? - ????)
(???? + (????
??
???? ) ??)
(IV.16)
1
?????? = (?????? - ????)
(???? + (???? - ??2
???? ) ??)
En remplaçant IV.16 dans IV.15 nous obtenons alors les
expressions des puissance actives et réactives :
???? = -????
|
??
????
|
1
(?????? - ????)
????+ (???? - ??2
???? ) ??
|
(IV.17)
|
|
????= -????
|
??
????
|
1 ????????
(?????? - ????) +
????+ (????- ??2 ????
???? ) ??
|
|
Après avoir obtenue les équations nous pouvons
développer le schéma bloc contrôle des puissances
statoriques de la MADA représenté à travers la figure
IV.9.
78
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
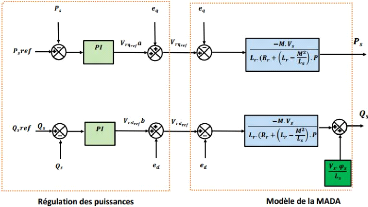
Figure IV-9. Contrôle des puissances statorique de la
MADA
IV.5.2 Régulation avec un correcteur PI classique
:
La figure IV-10 montre la régulation directe de puissance
avec un régulateur PI sur les deux axes d et q dont les fonctions de
transferts sont de la forme ?? ?? + ??? ??? .

Figure IV-10. Système régulé par un PI
classique. IV.5.2.1 Synthèses du régulateur PI classique
:
La fonction de Transfert en Boucle Ouverte (FTBO) avec les
régulateurs s'écrit de la manière suivante :
????????
|
=
|
(?? ??
|
????
|
??????
|
(IV.18)
|
|
|
|
????
|
|
|
|
On applique la méthode de compensation de pôles
pour la synthèse du régulateur éliminer le zéro
présent sur la fonction de transfert, nous choisissons :
79
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
Kp
|
|
LsRr
|
(IV.19)
|
Ki
|
=
|
M2
Ls (Lr - Ls)
|
|
|
Après l'application de la compensation des pôles,
on obtient :
FTBO =
|
MVs
KP M2
Ls (Lr - Ls)
|
(IV.20)
|
|
|
|
Ce qui nous donne FT en boucle fermée :
Avec :
MZ
1
Tr = Kp
Ls(LT-Ls )
MVs
Le terme ir désigne ici le temps
de réponse du système. Nous choisissons de fixer celui-ci
à 200 ms, ce qui représente une valeur suffisamment pour
l'utilisation faite sur l'éolienne où les variations de vent sont
peu rapides et les constantes de temps mécanique sont importantes. Une
valeur inférieure est susceptible d'engendrer des régimes
transitoires avec des dépassements importants et ne présente pas
d'intérêt particulier pour notre application [22]. Les termes
KKet Ki sont alors exprimés en fonction de
ce temps de réponse et des paramètres de la machine :
M2
Ls (Lr - Ls)
MVs
1
Tr
Kp =
(IV.22)
IV.6 Commande du convertisseur cotée
réseau (CCR)
Le schéma du CCR, du bus et du filtre R, L est
illustré dans la figure IV.11.
80
| 

