|
É
ÜíÜÈÜÚÜÔ
Ü á Ç É
ÜíÜØÑÇÜÞÜ
íãÏáÇ
ÉÜíÑÜÆÒÇ
Ü áÌÇ É
ÜíÑæÜåÜãÜ
áÌÇ
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET
POPULAIRE
íÜ
ãÜáÜÚáÇ
ËÍÜÈáÇæ
áí Ç ÜÚáÇ
ã ÜíáÜÚ
ÜÊáÇ
ÉÑÇÒæ
Ministère de l'Enseignement Supérieur et
de la Recherche Scientifique
- äÇ Ü
Óãá ÜÊ -
ÏÜíÇÜÞÜáÜÈ
Ñ ÜßÜÈ
Èí
ÉÚãÇÜÌ
Université Aboubakr Belkaïd - Tlemcen
Faculté de TECHNOLOGIE

MEMOIRE
Présenté pour l'obtention du
diplôme de MASTER
En
Electrotechnique
Spécialité
Commandes électriques
Par RAHMOUN Imad eddine
Et
YEBE Ahmed
Sujet
Contrôle de l'énergie réactive dans
un parc éolien
|
Soutenu publiquement, le
|
06 / 07 / 2021, devant le jury composé de :
|
|
S.M MELIANI
|
Maitre-Assistant
|
U.A.B.-Tlemcen
|
Président
|
|
H. SMAIL
|
Maitre-Assistante
|
U.A.B.-Tlemcen
|
Directeur de mémoire
|
|
F. DJAAFAR
|
Docteur
|
U.T.O.M.B
|
Co- Directeur de mémoire
|
|
B. YACOUBI
|
Maitre-Assistant
|
U.A.B.-Tlemcen
|
Examinateur
|
Remerciements
On remerciement tout d'abord Dieu, le miséricordieux,
le tout puissant de nous avoir donné la foi, le courage, la patience et
la volonté d'entamer de de finir ce mémoire.
On tient à remercier, Mademoiselle Houria SMAIL, Maitre
Assistante de classe B à l'Université Abou Bekr Belkaïd
Tlemcen et directeur de ce mémoire pour avoir proposé, suivi et
dirigé ce travail, mais aussi pour le respect et le professionnalisme
dont on a été témoin.
On tient aussi à remercier, Madame Fatiha DJAFAAR,
Docteur à l'Université des sciences et technologies Mohamed
Boudiaf à Oran co-directeur de ce mémoire pour avoir suivi et
surveillé l'état d'avancement ce travail, mais aussi pour le
respect et le professionnalisme dont on a été témoin.
Toute la gratitude à Messieurs B. YACOUBI et S.M
MELIANI, tous deux enseignants à l'Université Abou Bekr
Belkaïd Tlemcen, qu'ils aient accepté d'examiner et
présidée ce travail, on les remercie pour leurs observations et
leurs remarques pertinentes, directe et constructives.
Merci enfin à tous ceux qui, de près ou de loin,
ont contribué a l'aboutissement de ce travail.
i
SÇdieaee1
Je dédie ce travail :
o Aux êtres les plus chers à mon coeur, ma
mère et mon père, qui m'ont beaucoup soutenu durant mon cursus
d'étude et à qui je serai éternellement reconnaissant
o A mes chères soeurs.
o A mes petit nièces et neveux.
o A tous les enseignants qui m'ont aidé de près ou
de loin à réussir à obtenir mon master en
électrotechnique.
o A tous mes amis qui me sont chère : SEMMOUD Abdellah,
KHEBICHAT Boumedienne,RAFAA Fethi ,et mon binôme YEBE Ahmed.
o A tous ceux et celles qui m'ont encouragé et soutenu
durant mon cursus.
RAHMOUN Imad eddine
Tlemcen, le 20 Juin 2021.
ii
Dédicace 2
Je dédie ce travail :
o A mon père que Dieu lui fasse miséricorde,
à ma mère, à mon grand frère Mohamed, à tous
mes frères et soeurs, et à ma tante Mariem,
o A mes neveu Lemrabott, Nema et Ahmed,
o A tous mes cousins,
o A tous mes compatriotes,
o A Zahraoui Issam eddine, Fayçal Saidi, et à mon
binôme Rahmoun Imad eddine,
YEBE Ahmed
Tlemcen, le 20 Juin 2021.
iii
Table de matières
Remerciements i
Dédicaces 1 ii
Dédicaces 2 iii
Table de matières iv
Liste des figures vii
Liste des tableaux x
Liste des symboles xi
Liste des abréviations xii
Introduction général 1
Chapitre I : État de l'art des éoliens
I.1 Introduction 5
I.2 Définition de l'énergie éolienne 5
I.3 Origine de l'énergie éolien 6
I.4 Situation actuelle de l'énergie éolienne dans
le monde 8
I.5 Composants d'une éolienne 9
I.6 Classification des turbine éoliennes 10
I.6.1 Éolienne à axe horizontal 10
I.8.2 Éolienne à axe vertical 11
I.7 Les diffèrents type d'éoliennes 13
I.7.1 Éolienne à vitesse fixe 13
I.7.2 Éolienne à vitesse variable 13
I.8 Quelques notions de conversion de l'énergie
éolienne 15
I.8.1 Énergie cinétique du vent - conversion en
énergie mécanique 15
I.8.2 Conversion de l'énergie cinétique du vent en
énergie électrique 18
I.8.3 Les différents topologie d'alimentation de la MADA
19
I.8.3.1 MADA à énergie rotorique dissipé
19
I.8.3.2 MADA structure de Kramer 20
I.8.3.3 MADA structure de Scherbius avec cyclo convertisseur
21
iv
I.8.3.4 MADA structure de Scherbius avec convertisseur MLI 21
I.9 Avantages et inconvénients des systèmes
d'énergie éolienne 22
I.9.1 Avantages 22
I.9.2 Inconvénients 23
I.10 Conclusion 24
Chapitre II : Modélisation et commande d'une
turbine éolienne
II.1 Introduction 26
II.2 Modélisation du vent 26
II.3 Modélisation de la turbine 27
II.4 Modélisation du multiplicateur 29
II.5 Modélisation de l'arbre mécanique 30
II.6 Stratégie de commande de l'éolienne 31
II.6.1 Systèmes de régulation de la vitesse de
rotation de l'éolienne 32
II.6.1.1 Système à décrochage
aérodynamique "Stall" 32
II.6.1.2 Système d'orientation des pales "Pitch" 33
II.7 Zone de fonctionnement d'une eolienne 34
II.8 Principe de contrôle MPPT (stratégie
d'extraction du maximum de puissance) 35
II.8.1 Maximisation de la puissance sans asservissement de
vitesse 35
II.8.2 Maximisation de la puissance avec asservissement de la
vitesse 37
II.9 Résultat de simulation 40
II.9.1 Résultats de simulation de la turbine avec
asservissement de la vitesse mécanique 41
· Interprétation des résultats 42
II.9.2 Résultats de simulation de la turbine sans
asservissement de la vitesse mécanique 42
· Interprétation des résultats 44
II.10 Conclusion 44
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
III.1 Introduction 46
III.2 Description de la MADA 46
III.3 Mode de fonctionnement de la MADA 47
III.3.1 Fonctionnement en moteur hypo-synchrone 47
III.3.2 Fonctionnement en moteur hyper-synchrone 47
III.3.3 Fonctionnement en mode génératrice
hyper-synchrone 48
III.3.4 Fonctionnement en mode génératrice
hypo-synchrone 48
v
III.4 Modélisation de la MADA 49
III.4.1 Modèle de la MADA dans le repère
triphasé-triphasé 49
III.4.1.1 Hypothèse simplificatrice 50
III.4.1.2 Equation électrique 50
III.4.1.3 Equation Magnétique 51
III.4.1.4 Equation mécanique 52
III.4.2 Modèle de la MADA dans le repère de Park
52
III.4.2.1 Définition de la transformation de Park 52
III.4.2.2 Equation électrique 54
III.4.2.3 Equation du flux magnétique 54
III.4.2.4 Equation du couple électromagnétique :
55
III.4.2.5 Equation des puissance active et réactive
statorique et rotorique 55
III.6.5 Choix du référentiel (d-q) 56
III.4.2.6 Référentiel liée au champ
tournant 56
III.4.2.7 Référentiel liée au stator 56
III.4.2.8 Référentiel liée au rotor 57
III.5 Modélisation des convertisseurs statiques 57
III.5.1 Modélisation du convertisseur coté MADA
58
III.5.2 Modélisation du bus continue 59
III.5.3 Modélisation du convertisseur cotée
réseau 60
III.5.4 Modélisation du filtre 62
III.5.5 Commandes à Modulation de Largeur d'Impulsion
(MLI) 64
III.5.5.1 Modulation a largeur d'Impulsion Sinus-Triangle 64
III.6 Conclusion 65
Chapite IV: Stratégie de commande des puissance
active et réactive
IV.1 Introduction 68
IV.2 Architecture du dispositif de commande 68
IV.3 Commande vectorielle 69
IV.4 Commande du convertisseur coté MADA 70
IV.4.1 Choix du référentiel pour le modèle
de la MADA 71
IV.4.2 Détermination des angles pour les transformations
de Park 71
IV.4.3 Modélisation de la MADA avec orientation du flux
statorique 72
IV.5 Contrôle indépendant des puissances active et
réactive de la MADA 76
IV.5.1 Régulation des puissance active et réactive
de la MADA 77
vi
IV.5.2 Régulation avec un correcteur PI classique 79
IV.5.2.1 Synthèses du régulateur PI classique
79
IV.6 Commande du convertisseur cotée réseau (CCR)
80
IV.6.1 Commande du bus continu 82
IV.6.2 Commande des courants dans le filtre : 83
IV.7 Résultats de simulation 86
IV.8 Conclusion 88
Conclusion générale 90
Bibliographie
Annexe A Annexe B Résumé
vii
Liste des figures
Chapitre I : État de l'art des
éoliens
Figure I-1. Conversion de l'énergie cinétique
du vent 6
Figure I-2. Moulin à vent hollandais avec queue pour
orientation automatique 6
Figure I-3. Moulin à vent (moulin à vent
terrestre hollandais) avec voiles à ressort 7
Figure I-4- Capacité éolienne installée
dans le monde entre 2001 et 2020 en GW 9
Figure I-5- Composants d'une éolienne 10
Figure I-6- Éolienne à axe horizontal 11
Figure I-7-Éoliennes à axe vertical de Darius
12
Figure I-8. Éoliennes de type Savonius 12
Figure I-9 Structure d'une éolienne à vitesse
fixe 14
Figure I-10. Structure d'une éolienne connectée
au réseau 14
Figure I-11-Schéma de l'écoulement d'un fluide
à travers un disque 16
Figure I- 12-Rendement aérodynamique en fonction du
tipspeed ratio et du modèle d'éolienne 18
Figure I-13-Chaine de conversion d'une éolienne 19
Figure I-14-MADA avec contrôle du glissement par
l'énergie dissipée 20
Figure I-15-Structure de Kramer 20
Figure I-16-Structure de Scherbius avec cyclo convertisseur
21
Figure I-17-Structure de Scherbius avec convertisseurs MLI
22
Chapitre II : Modélisation et commande d'une
turbine éolienne
Figure II- 1. Structure d'une turbine éolienne 27
Figure II-2-Coefficient de puissance et vitesse relative pour
différents angles de calages. 28
Figure II-3. Modèle d'un multiplicateur 29
Figure II-4. Modèle de transmission mécanique
ramenée à l'arbre Mécanique 30
Figure II-5. Schéma bloc de la turbine
modélisé 31
Figure II-6. Flux d'air sur un profil de pale " Stall "
32
Figure II-7. Variation de l'angle de calage d'une pale 33
Figure II-8. Courbe de la puissance éolienne en
fonction de la vitesse du vent 35
Figure II-9. Schéma bloc de la maximisation de la
puissance sans asservissement de vitesse 36
Figure II-10. Schéma bloc de la maximisation de la
puissance avec asservissement de vitesse 38
Figure II-11- Schéma bloc de la régulation de
vitesse avec régulateur PI 39
Figure II-12- Profil du vent appliqué. 40
viii
Figure II-13- Simulation de la commande MPPT avec un
asservissement de vitesse 41
Figure II-14- Simulation de la commande MPPT sans asservissement
de vitesse 43
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
Figure III-1.Structure d'une MADA connectée au
réseau 46
Figure III-2- Schéma de structure de la MADA en mode
moteur hypo-synchrone 47
Figure III-3.Schéma de structure de la MADA en mode
moteur hyper-synchrone 48
Figure III-4.Fonctionnement Génératrice
hyper-synchrone 48
Figure III-5. Fonctionnement en mode génératrice
hypo-synchrone 49
Figure III-6. Représentation spatiale des enroulements de
la MADA 49
Figure III-7. Transformation de Park 53
Figure III-8. Structure de la chaine de conversion
étudiée 58
Figure III-9. Redresseur triphasée double alternance
58
Figure III-10. Modèle du bus continue 59
Figure III-11. Onduleur de tension triphasée 61
Figure III-12. Filtre coté réseau 63
Figure III-13. Principe de fonctionnement de la technique MLI
triangulo sinusoïdal 65
Chapitre IV : Stratégie de commande des
puissances active et réactive de la MADA
Figure IV-5.Architecture du dispositif de commande 69
Figure IV-2. Principe de la commande vectorielle 70
Figure IV-3. Structure de commande du convertisseur cotée
MADA 70
Figure IV-4. Schéma structurel de la détermination
des angles pour la transformation de Park 71
Figure IV-5. Référentiel diphasé ????
liée au champ tournant statorique. 72
Figure IV-6. Schéma bloc du système à
réguler 75
Figure IV-7- Schéma bloc de la commande directe de
puissance de la MADA. 76
Figure IV-8. Schéma bloc de la commande indirecte de
puissance de la MADA 77
Figure IV-9. Contrôle des puissances statorique de la MADA
79
Figure IV-10. Système régulé par un PI
classique. 79
Figure IV-11-Schéma structurel du CCR, du bus et du filtre
RL 81
Figure IV-12- Schéma global du contrôle du CCR
82
Figure IV-13- Modèle en boucle fermé de la boucle
de tension du bus continu. 83
Figure IV-14- Contrôle des courants circulant dans le
filtre RL 85
Figure IV -15-Resultats de simulations 86
ix
Liste des Tableaux
Chapitre I : État de l'art des
éoliens
Tableau I-1. Comparaison entre une éolienne a vitesse
fixe et une éolienne à vitesse variable. .. 15
Chapitre II : Modélisation et commande d'une
turbine éolienne
Tableau II-13. Paramètre nominal de la simulation de
la partie mécanique. 40
x
Liste des symboles
Symbole
|
Nom
|
Unité
|
A
|
Vitesse relative
|
/
|
p
|
La densité de l'aire
|
/
|
A1
|
La surface
|
m2
|
Vvent
|
La vitesse du vent
|
m/s
|
Pvent
|
Puissance du vent
|
W
|
Pt
|
Puissance de la turbine
|
W
|
R
|
Rayon des pales de la turbine
|
m
|
/3
|
Angle de calage
|
o
|
.opt
|
La vitesse relative optimal
|
/
|
Paero
|
Puissance aérodynamique
|
W
|
Ps
|
Puissance Actif statorique
|
W
|
Qs
|
Puissance réactif statorique
|
VAR
|
Qr
|
Puissance réactif rotorique
|
VAR
|
Pr
|
Puissance Actif rotorique
|
W
|
Cp
|
Coefficient de puissance
|
/
|
Cp_max
|
Coefficient de puissance maximal
|
/
|
Caer
|
Couple aérodynamique
|
Nm
|
Cmec
|
Couple mécanique
|
Nm
|
Cvis
|
Couple de frottement visqueux
|
Nm
|
CL
|
Couple du multiplicateur
|
Nm
|
Ct_est
|
Couple de la turbine estimé
|
Nm
|
f1t
|
Vitesse de rotation de la turbine
|
rad/s
|
f1L
|
Vitesse de la génératrice
|
rad/s
|
f1mec
|
Vitesse mécanique de la turbine
|
rad/s
|
G
|
Gain du multiplicateur
|
/
|
J
|
Inertie total
|
kg. m2
|
JL
|
Inertie de la génératrice
|
kg. m2
|
Jt
|
Inertie de la turbine
|
kg. m2
|
p
|
Nombre de pair de pôles
|
/
|
|
xi
nt _est Vitesse de la turbine estimé
rad/s
Vvent_est Vitesse du vent estimé
m/s
f Coefficient visqueux N. m. s/rad
Ti3 Constante du temps du système pitch
s
Nref Angle de calage de référence
o
f Coefficient d'amortissement /
wn Pulsation propre rad/s
fr Fréquence de
référence Hz
fP Fréquence de la porteuse
Hz
m Indice de modulation /
Vsa, Vsb, Vsc Les tensions simples statorique
V
Vra, Vrb, Vrc Les tensions simples rotorique
V
Vdr, Var Les tensions rotoriques sur l'axe d-q
V
Vds, Vas Les tensions statoriques sur l'axe d-q
V
V,,,, Amplitude de la tension d'alimentation
V
Vs Tension de sortie du redresseur
V
Vdc Tension du bus continue V
Vt Tension du filtre V
Vref Amplitude de la tension de
référence V
VP La crête de modulation
V
Vmd, Vmq Les tensions modulées par le CCR
V
C Capacité du condensateur F
Isa, Isb, Isc Les courant de phase instantané
statorique A
Ira, Irb, Irc Les courant de phase instantané
rotorique A
Iqs, Ids Les courant statorique sur l'axe d-q
A
Ida, Idr Les courant rotorique sur l'axe d-q
A
A Angle électrique entre les repères
statorique et rotorique rad
ÇPsa, ÇPsb, ÇPsc Flux
statorique Wb
ÇPra, ÇPrb, ÇPrc Flux rotorique
Wb
ÇPqs, ÇPds Les flux statoriques sur
l'axe d-q Wb
ÇPqr, ÇPdr Les flux rotoriques sur
l'axe d-q Wb
xii
Rs
|
Résistance statorique
|
ohm
|
R,.
|
Résistance rotorique
|
H
|
Ls
|
Inductance propre statorique
|
H
|
L,.
|
Inductance propre rotorique
|
H
|
Mr
|
Inductance mutuelle entre phase rotorique
|
H
|
Ms
|
Inductance mutuelle entre phase statorique
|
H
|
wr
|
Pulsation rotorique
|
rad/s
|
ws
|
Pulsation statorique
|
rad/s
|
lt
|
Inductance du filtre
|
H
|
Rt
|
Résistance du filtre
|
ohm
|
|
Liste des abréviations
Abréviation Signification
FOC Field orientation control
PLL Phase Locke Loop
DFIG Doubly Feed Induction Generator
MADA Machine Asynchrone à Double Alimentation
CCM Convertisseur coté MADA
CCR Convertisseur coté réseau
D Diode
MPPT Maximum Power Point Traking
IGBT Insulated Gate Bipolar Transistor
MLI Modulation de Largeur d'Impulsion
PWM Pulse With Modulation
PI Proportionnel et Intégral
GTO Gate Turn-off thyristor
xiii
Introduction générale
Introduction générale
Face à l'évolution quotidienne de la
technologies dans divers domaines industrielles, et la multiplication des
besoins en matérielles électriques ,la consommation de
l'énergie électrique ne cesse de croitre cette forte consommation
impose au pays développée une forte production d'énergie
élécrique,Par conséquent les centrales nucléaires
dont fortement solicitée,cette source d'énergie renouvelable
comparée au centrale thermiques n'engendre en aucun cas la pollution de
l'atmosphère mais le cotée négatif de cette source
d'énergie est le risques d'accident nucléaire qui est asse
problematique.Il est donc préférables de se tourné vers
des sources d'énergie plus propres avec un rendement
élevée en terme de production. Parmi les énergies les plus
prometteuses en termes de potentiel énergétique et du faible taux
de pollution de l'atmosphère on retrouve l'énergie
éoliennes. Cet énergie renouvelable ne cesse de croitre et
d'être de plus en plus exploitée dans le monde,l'Allemegne
l'Espagne le Danemark et la France sont les leader mondial de l'énergie
éoliennes.
Afin de mieux tirer profit de cette source d'énergie
et de permettre un contrôle adéquat et optimal de l'énergie
produite les chercheurs en Génie électrique ont effectuée
des études approfondies afin d'améliorer la conversion
électromécanique et la qualité de l'énergie
produite et de mettre en place un contrôle facile et efficace.
La conversion de l'énergie électrique se fait
à travers plusieurs éléments qui constitue la chaine de
production de l'éolienne de la puissance cinétique du vent
jusqu'au réseau.
Les générateurs les plus utilisé dans
les parcs éoliens sont les machine asynchrone a double alimentation car
cette dernière engendre un bénéfices économique
important para port au autre Machines qui existe dans le monde grâce
à ces convertisseurs statiques triphasés dimensionnés pour
une partie de la puissance nominale de la MADA. [1]
Comparée à la machine asynchrone à cage
la machine asynchrone à double alimentation peut fonctionner sur une
large plage de variation de vitesse #177; 30 % autour de la vitesse de
synchronisme, cet possibilité de fonctionnement permet de produire de
l'énergie électrique a une vitesse variables et ainsi mieux tirer
profit de la variation de l'énergie cinétique du vent. [2]
Actuellement la machine asynchrone à double
alimentation est utilisée dans divers domaines et dans ces deux modes de
fonctionnement, soit en moteur comme la traction ferroviaire, soit en
génératrice comme dans les parcs éoliens [2].Sa forte
utilisation est lié à sa grande souplesse de fonctionnement
liée à la présence des convertisseurs statiques, une
possibilité de réglage de la
1
Introduction générale
répartition des puissances statorique et rotorique
afin d'optimiser les dimensions des convertisseurs. [2]
Notre mémoire porte sur la conversion de
l'énergie éolienne en énergie électrique et plus
précisément la mise en place d'une stratégie de
contrôle de l'énergie réactive produite par un parc
éolien et le contrôle des turbines à vitesse variables
à base de générateurs asynchrone a double alimentation.
Le premier chapitre est consacré aux notions
générales sur l'énergie éolienne. La situation
actuelle, Les différents composantes et les principales
caractéristiques des éolienne et une approche
générale et globale de diverses technologies des
aérogénérateurs seront brièvement
présentées. Ensuite Un aperçu sur les différents
types d'éoliennes à axe vertical et horizontal, leurs
caractéristiques et un rappel sur les différents types de
génératrices utilisées dans la conversion éolienne.
En fin de ce chapitre les avantages et inconvénient des énergies
renouvelables seront abordé.
Dans le deuxième chapitre les différents
composant de la partie mécanique de l'éolien seront
modélisés tous un présentant les différentes
équations mathématiques qui constitue les diffèrent
schéma-blocs. Ensuite les diffèrent stratégie de commande
de l'éolien à vitesse variable, système d'orientation de
vitesse de rotation "stall" et "pitch" sont discuter. En fin les zone de
fonctionnement et les stratégies de commande MPPT (Maximum Power Point
Tracking) avec et sans asservissement vont être présenter et
simulé sous logiciel Matlab/Simulink, afin de définir la
meilleure stratégie de commande.
Le troisième chapitre est consacré à la
description de la Machines asynchrone à double alimentation et ces
différents modes de fonctionnement et sa modélisation dans
différent repérés, tout en présentant les
diffèrent équation électrique et magnétique. En
suite les différents choix possibles du référentiel d-q,
Par rapport au rotor, au stator et au champ tournant, vont être discuter.
Une modélisation des convertisseurs statique va être aborder, Ces
convertisseurs AC-DC-AC sont constitué de deux parties : une
branché sur le côté machine et l'autre sur le
côté réseau. En fin une étude de commande MLI va
être présenter.
Le dernier chapitre est consacré aux notion
général de la stratégie de contrôle proposé
qui est basée sur la commande vectorielle par l'orientation du flux
statorique ,cette méthode permet d'assimiler le comportement d'une
machine asynchrone a une machine a courants continue en retrouvant la
quadrature entre le courants et le flux qui vas nous permettre de
contrôlé les puissances actif et
2
Introduction générale
réactives .La dernière partie de ce chapitre
fera l'objet d'une présentation des résultats de simulation de la
commande appliquée à l'ensemble de la chaine de conversion, afin
de valider la structure étudié.
3
Chapitre I : État de l'art des
systèmes éoliens
4
Chapitre I : État de l'art des systèmes
éoliens.
I.1 Introduction
L'énergie électrique est l'énergie la
plus utilisée et développée dans le monde car cette
dernière est le facteur le plus important pour le développement
et l'évolution de la race humaine.
Afin de répondre aux besoins en énergie
électrique qui ne cessent d'augmenter massivement ces dernières
années, plusieurs sources d'énergie renouvelables et non
renouvelables sont exploitées. Parmi les sources les plus
exploitée on trouve l'énergie éolienne.
Le principal intérêt envers cette source
d'énergie renouvelable est son caractère écologique,
surtout dans le contexte actuel où la terre entière subit les
conséquences du réchauffement climatique.
Dans ce chapitre, nous avons fait une étude de
l'état de l'art des éoliennes et les diverses technologies des
aérogénérateurs et leurs principales
caractéristiques, les différents types, ainsi que les
différentes configurations.
I.2 Définition de l'énergie
éolienne
L'éolienne produit de l'électricité
grâce à la force du vent, une source d'énergie renouvelable
inépuisable et gratuite, il existe deux grands types d'installation
d'éoliennes le parc terrestre dit (onshore) et le parc implanté
en mer a plusieurs Km au large des côtes (offshore).
L'éolienne peut mesurer jusqu'à 120m
l'hélice appelée rotor est composée en
général de trois pales se met à tourner sous l'effet d'un
vent d'au moins 10Km/h, la nacelle sur la quel elle est fixée s'oriente
automatiquement pour être toujours face au vent et les palles pilote pour
captée un maximum de vent.
Si le vent dépasse 90km/h l'éoliennes
s'arrête automatiquement de fonctionnée pour des questions de
sécurité, dans la nacelle l'hélice fait tournée un
axe sa vitesse de rotation n'est tant pas suffisante pour générer
de l'électricité un multiplicateur augmente cette Vitesse
jusqu'à atteindre les 1500tr/min et la transmet à un second axe
qui fait à son tour tournée un alternateur.
Dans l'alternateur l'interaction entre les
électro-aimant du rotor et les bobine du stator la produit un courant
électrique, un transformateur situé à l'intérieur
du mat élevé la tension de ce courant a 20 000V.
L'électricité est ensuite acheminé par un câble sous
terrain ou sous-marin et sera élevé à 400 000V par un
poste de transformation pour être transporté facilement à
travers les
5
Chapitre I : État de l'art des systèmes
éoliens.
lignes haute tension du réseau,
régulièrement tous les composant de l'éoliennes son
surveillée et contrôlé.
L'électricité d'origine éoliennes
n'émet pas de gaz à effet de serre contenue de l'intermittence de
la production liée à la force du vent elle est utilisée en
complément d'autre source d'énergie pour répondre au
besoin en électricité. La figure I.1 représente le
principe de fonctionnement d'une éolienne.

Figure I.1-conversion de l'Energie cinétique du vent
[3].
I.3 Origine de l'énergie
éolien
L'histoires éoliennes remonte à plus de 2000
ans. Ils ont été utilisés principalement pour pomper l'eau
et pour moudre les céréales. Dès le 13e siècle, les
moulins à vent à axe horizontal ont jouer un rôle
très essentiel dans l'économie rurale. Les moulins à vent
hollandaise (figure I.2 et figureI.3) ont été construits en grand
nombre aux 17e et 18e siècles en Europe. [3]

Figure I.2-Moulin à vent hollandais avec queue pour
orientation automatique [4].
6
Chapitre I : État de l'art des systèmes
éoliens.
Les éoliennes produisent de
l'électricité depuis 1888. Par rapport à d'autres sources
d'énergie renouvelables, comme le photovoltaïque, au début
du 19e siècle le développement des éoliennes n'as pas
cessé de croitre et a permis au moulin occidental d'apparaitre, on le
trouve dans les zones rurales, surtout aux États-Unis, jusqu'au
début du 20e siècle et jusqu'à aujourd'hui. La
révolution et le développement des convertisseurs
d'énergie éolienne ont été
développées dans les années 1920, mais ce n'est que dans
les années 1980 qu'elles ont était exploité et
utilisé en tant qu'élément important dans la convention et
l'exploitation des énergie renouvelables [3].La
première théorie appropriée a été
publiée le début du19ème siècle (Joukovski
1907).
Les éoliennes modernes sont généralement
construites comme des machines à rotation rapide avec un arbre
horizontal, une disposition au vent et, de préférence, avec un
moteur à combustion interne et de préférence 3 pales de
rotor. La puissance des machines a régulièrement augmenté
de sorte que la puissance moyenne installée par unité est
actuellement supérieure à 1.700kW. Pour les parcs éoliens
en mer, des puissances allant jusqu'à 6.000 kW sont en phase de
développement. [3].
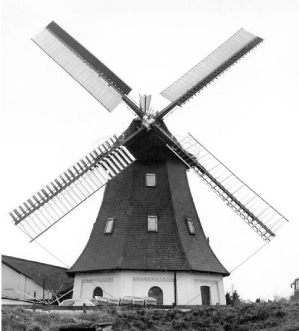
Figure I.3-Moulin à vent (moulin à vent terrestre
hollandais) avec voiles à ressort [4].
7
Chapitre I : État de l'art des systèmes
éoliens.
I.4 Situation actuelle de l'énergie
éolienne dans le monde
Pour se remettre économiquement de la crise covid-19,
les gouvernements du monde entier mettent en place des plans de relance pour
soutenir les industries qui stimuleront la croissance économique. Le
secteur de l'énergie est une industrie clé pour alimenter
l'activité économique, cependant, et c'est pour cela que
l'année 2020 a été la meilleure année de l'histoire
pour l'industrie éolienne mondiale avec 93 GW de nouvelles
capacités installées - soit une augmentation de 53 % par rapport
à l'année dernière mais cette croissance n'est pas
suffisante pour garantir que le monde atteigne le zéro net d'ici 2050.
[5] Le monde doit installer l'énergie éolienne trois fois plus
rapidement au cours de la prochaine décennie afin de rester sur une voie
zéro nette et d'éviter les pires impacts du changement
climatique. [5]
Grâce aux innovations technologiques et aux
économies d'échelle, le marché mondial de l'énergie
éolienne a presque quadruplé au cours de la dernière
décennie et s'est imposé comme l'une des sources d'énergie
les plus rentables et les plus résilientes au monde. En 2020, une
croissance record a été tirée par une vague
d'installations en Chine et aux États-Unis - les deux plus grands
marchés mondiaux de l'énergie éolienne - qui ont
installé ensemble près de 75 % des nouvelles installations en
2020 et représentent plus de la moitié de la capacité
éolienne totale du monde. [5]
Aujourd'hui, il existe environ 743 GW de capacité
éolienne dans le monde, ce qui permet d'éviter plus de 1,1
milliard de tonnes de CO2 dans le monde - soit l'équivalent des
émissions annuelles de carbone de l'Amérique du Sud. [5]
Pourtant, comme la technologie de l'énergie propre
avec le potentiel de décarbonisation le plus élevé par MW,
le taux actuel de déploiement de l'énergie éolienne ne
sera pas suffisant pour atteindre la neutralité carbone d'ici le milieu
de ce siècle, et des mesures urgentes doivent être prises par les
décideurs dès maintenant pour intensifier l'énergie
éolienne au rythme nécessaire [5]
En 2020, le marché annuel de l'éolien (onshore
et offshore combinés) dans toutes les régions l'Europe, l'Afrique
et le Moyen-Orient a enregistrée une augmentation de 32,2 GW annuel
provenant du marché de l'éolien terrestre [5] : la Chine 24,6 GW,
les États-Unis 7,8 GW, l'Amérique latine 1,0 GW, cependant,
l'année 2020 a été une année difficile pour le
marché indien de l'éolien terrestre. Outre les défis
d'acquisition de terrains, de connexion au raccordement au réseau et
l'obtention de permis, la pandémie de COVID-19 a sérieusement
touché le marché et a provoqué des retards dans
l'exécution des projets de construction. Les nouvelles installations
en
8
Chapitre I : État de l'art des systèmes
éoliens.
Afrique et au Moyen-Orient ont diminué de 7 MW par
rapport à l'année précédente, principalement en
raison de la faiblesse relative des installations en Afrique du Nord, notamment
en Égypte et au Maroc. Nouvelles installations d'éoliennes en mer
ont légèrement diminué par rapport à 2019, ce qui
s'explique principalement par la faiblesse de l'activité dans les deux
plus grands marchés offshore européens : le Royaume-Uni et
l'Allemagne. [5].La figure I-4 montre l'évolution des éoliennes
installer dans le monde en Gw entre 2001 et 2020.

Figure I.4-Capacité éolienne installée dans
le monde entre 2001 et 2020 en GW [5].
I.5 Composants d'une éolienne
Il existe plusieurs configurations possibles
d'éoliennes. Cependant, une éolienne classique se compose
généralement de trois éléments principaux : tout
d'abord, le mât, qui est un tube d'acier ou un treillis
métallique, utilisé pour éviter les perturbations
près du sol. Cependant, la quantité de matériel mis en
oeuvre représente un coût non négligeable et le poids doit
être limité [6]. Il est préférable de prendre un
mât d'une taille supérieure ou légèrement
supérieur au diamètre du rotor de l'éolienne.
Le deuxième élément d'une
éolienne est la nacelle, qui rassemble tous les éléments
mécaniques permettant de coupler l'éolienne à un moteur.
Le générateur électrique de l'éolienne : le frein
le système de régulation électrique et le multiplicateur.
Le frein à disque, qui est différent du frein
aérodynamique, permet d'arrêter le système en cas de
surcharge éventuelle. Le générateur qui est
généralement composé d'une machine synchrone ou asynchrone
et d'un pilotage
9
Chapitre I : État de l'art des systèmes
éoliens.
hydraulique ou électrique des pales (frein
aérodynamique) et de la nacelle la figure I.5 représente les
composants d'une éolienne. [6]
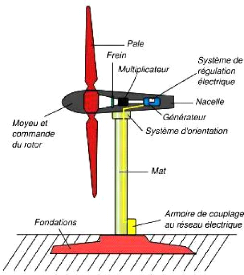
Figure.I.5-Composants d'une éolienne [7].
I.6 Classification des turbine
éoliennes
Ils existent deux types de turbine éoliennes :
I.6.1 Éolienne à axe
horizontal
Les éoliennes à axe horizontal mesurent environ
10 à 35m de haut et produisent au maximum 36kW contre 2 à 6mW
pour les grandes éoliennes selon leurs tailles.
Presque tous les systèmes d'énergie
éolienne dans le marchée utilisent des éoliennes de type
horizontal. L'axe de rotation est horizontal. Le principal avantage de
l'éolienne de type horizontal est que quand on utilise le contrôle
du pas des pales, la vitesse du rotor et la puissance de sortie peuvent
être contrôlées. [8]
Le contrôle du pas des pales protège
également l'éolienne contre la survitesse lorsque la vitesse du
vent devient dangereusement élevée. Le principe de base d'une
éolienne à axe horizontal est basé sur des concepts
similaires à ceux d'une hélice. [8]
10
Chapitre I : État de l'art des systèmes
éoliens.
Le développement des hélices améliore
largement les performances et le rendement de la production et la
qualité de l'énergie électrique. La figure I.6
représente une éolienne à axe horizontal.

Figure I.6-éolienne a axe horizontal [9] .
I.8.2 Eolienne a axe vertical
Les éoliennes à axe vertical sont plus
onéreuses que les éoliennes à axe horizontal et de
conception plus complexes mais s'adaptent plus facilement à des zones de
vent irrégulier. Une éolienne à axe vertical est surtout
utile dans les endroits où il n'y a pas beaucoup de place : en ville,
sur le toit d'un immeuble par exemple. [10]
Les éoliennes à axe vertical existent en deux
type Darrieus (figure I.7) et Savonius (figure I.8) du nom de leurs inventeurs,
une éolienne de type Darrieus peut produire jusqu'à 5000kWh/an
c'est petite éolienne encore peut répondus peuvent être
utilisé pour des petite puissance sur des sites isolée dite
off-grid ou en auto consommation.
11
Chapitre I : État de l'art des systèmes
éoliens.
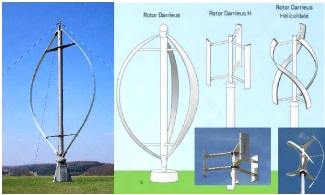
Figure I-7-éoliennes axe vertical de Darius
[9].
Elles sont peu encombrantes, et ne nécessitent pas de
systèmes d'orientations et sont simples à installer. Par contre,
elles ont un faible rendement et ne démarrent pas toutes seules. [10]
Ces dernières ont un rapport de vitesse de pointe
très faible et un faible coefficient de puissance, elles ne sont donc
utilisées que dans des systèmes d'énergie éolienne
de très faible puissance. [8]
Figure I-8. Éoliennes de type Savonius [9].
Le générateur à axe vertical a une
conception simple. L'arbre est vertical, de sorte que le
générateur est monté sur le sol et la tour n'est
nécessaire que pour monter les pales.
12
Chapitre I : État de l'art des systèmes
éoliens.
Les inconvénients sont le rapport de vitesse de pointe
et la puissance de sortie qui sont très faibles par rapport aux
générateurs à axe horizontal. La turbine a besoin d'une
poussée initiale pour démarrer ; elle n'est pas
auto-démarrante.Il n'est pas non plus possible de contrôler la
puissance de sortie en faisant pivoter les pales du rotor. [8]
Ces éoliennes utilisent généralement des
batteries pour emmagasinée l'énergie produite un
régulateur de charge protèges les batteries de la surcharge dans
le cas de l'autoconsommation un convertisseur permet lorsque les batteries son
assez chargé de transformer le courant continue des batteries en
ça et d'apporté un complément d'énergie pour la
consommation personnelle du lieu. Lorsque les batteries son pleines le surplus
d'énergie est injecté dans le réseaux
électrique.
I.7 Les différents types
d'éoliennes
En général, les turbines éoliennes peuvent
être divisés en deux types :
I.7.1 Éolienne à vitesse fixe
Eolienne à vitesse fixe génère une
vitesse fixe et constante grâce a son système mécanique
d'orientation des pales. Cette vitesse est déterminée par le
rapport du réducteur, la fréquence du réseau et le nombre
de pole de la génératrice. La vitesse de son rotor varie a une
dans une plage terminisme de l'ordre de 1a 2% de la vitesse nominal.
Étant donné que la vitesse de son rotor ne peut pas varier, le
changement aléatoire de la vitesse du vent affecte directement le couple
de la chaine cinématique de l'éolienne, entraînant des
charges structurelles plus élevées qu'en cas de fonctionnement
à vitesse variable.
Une éolienne à vitesse fixe est
constituée d'un générateur asynchrone à cage
d'écureuil, cette dernière est directement couplée au
réseau.
Cependant, les turbines à vitesse constante doivent
être plus robustes mécaniquement que les turbines à vitesse
variable [11] [8]. La figure I.9 représente la structure d'une
éolienne à vitesse fixe directement connecter au
réseau.
13
Chapitre I : État de l'art des systèmes
éoliens.

Figure I-9 Structure d'une éolienne a vitesse fixe
à base de machine asynchrone à cage [12].
I.7.2 Éolienne à vitesse
variable
La figure I .10 représente la structure d'une
éolienne a vitesse variable connectée au réseau. Les
éoliennes à vitesse variable peuvent atteindre une
efficacité de conversion et fournir de l'énergie dans une large
gamme de vitesses de vent. La turbine change continuellement sa vitesse de
rotation en fonction de la vitesse du vent afin de maximiser la puissance
produite. Dans ces circonstances la vitesse spécifique ??
représente la vitesse de la pale par rapport à la vitesse du
vent, cette dernière peut être maintenu a sa valeur optimale afin
d'extraire le maximum d'énergie possible. Afin de rendre la vitesse de
la turbine réglable, l'éolienne est raccordée au
réseau électrique travers un convertisseur de puissance. [13]
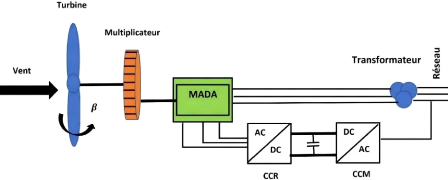
Figure I-10. Structure d'une éolienne a vitesse variable
connectée au réseau. [12]
14
Chapitre I : État de l'art des systèmes
éoliens.
Le tableau ci-dessous, représente les principaux
avantages et inconvénients des turbines à vitesse variable,
comparé aux turbines à vitesse fixe.
Tableau I-1. Comparaison entre une éolienne à
vitesse fixe et une éolienne à vitesse
variable.
Type d'éolienne
|
|
Avantage
|
|
Inconvénients
|
Éolienne à vitesse fixe
|
·
|
Simple, robuste, et fiable
|
·
|
Rendement en énergie produite faible.
|
|
·
|
Faible cout de construction.
|
·
|
Fluctuation aléatoire de la puissance
|
|
·
|
Faible cout de maintenance.
|
|
produite.
|
Éolienne à vitesse variable
|
·
|
Rendement élevé en conversion d'énergie.
|
·
|
Cout élevé de construction.
|
|
·
|
Puissance électrique
de meilleure qualité.
|
·
|
Perte en puissance asse importante du au
|
|
·
|
Stresse mécanique
|
|
convertisseur.
|
|
|
réduit.
|
·
|
Contrôle du système plus compliqué.
|
|
I.8 Quelques notions de conversion de l'énergie
éolienne I.8.1 Énergie cinétique du vent - conversion en
énergie mécanique
La théorie du disque traversé par une vitesse de
vent explique de manière très simple le processus d'extraction de
l'énergie cinétique du vent. L'énergie cinétique du
vent, basé sur des bilans énergétiques et l'application de
l'équation de BERBOULLI. [14]
Le rotor du vent captant l'énergie est vu comme un disque
poreux, qui provoque une diminution de la quantité de mouvement du flux
d'air, ce qui entraîne un saut de pression dans la face du disque et une
déviation des flux en aval (figure 1.11). [14]
15
Chapitre I : État de l'art des systèmes
éoliens.
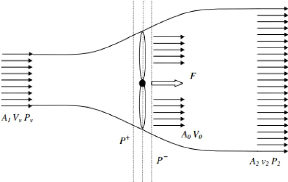
Figure I.11-Schéma de l'écoulement d'un fluide
à travers un disque. [14]
La théorie de la quantité de mouvement est
utilisée pour étudier le comportement de l'éolienne et
pour mettre en place certaines hypothèses, l'air est incompressible, le
mouvement du fluide est régulier et que les paramètres
étudiés sont fluides est régulier, et les variables
étudiées ont la même valeur sur une section donnée
du tube de courant d'air.
Le tube de courant d'air la puissance contenue sous forme
d'énergie cinétique dans le vent traversant à une vitesse
???? la surface A1, est exprimée par l'équation I.1 :
[14]
?? (I.1)
???? = 2 A1 ????3
Avec :
?? :la densité de l'aire. ?? 1,2????/??^3.
L'éolienne ne peut récupérer qu'une partie
de cette puissance, cette puissance est exprimé par l'équation
I.2:
?? (I.2)
???? = C?? 2 R2 ??????
Avec :
R: Le rayon des pales de l'éolienne. C??: Le coefficient
de puissance.
16
Chapitre I : État de l'art des systèmes
éoliens.
?? ?? : Exprime l'efficacité de l'éolienne dans la
transformation de l'énergie cinétique du vent en énergie
mécanique. Le coefficient est exprimé en fonction de la vitesse
du vent, de la vitesse de rotation de l'éolienne, de la vitesse de
rotation du rotor, de l'angle d'inclinaison ?? [14].
?? ?? est souvent donné en fonction du rapport de vitesse
de pointe ?? qui est définit par :
La valeur maximale théorique de ?? ?? est définit
par la loi de BETZ:
?? ???????? =
|
16
27
|
(I.4)
= 59.3% = 0.593
|
|
Le couple rotorique est obtenu à partir de la
puissance générée et de la vitesse de rotation de la
turbine :
????
???? = Ù??
|
??????2????3
??????3????2
??????3????2
= ???? = 2?? ???? = 2 ????
2Ù??
|
(I.5)
|
|
Où ???? est le coefficient du couple. Le coefficient
de puissance ?? ?? ,et le couple sont liés par l'équation I.6:
?? ??(??) = ??????(??) (I.6)
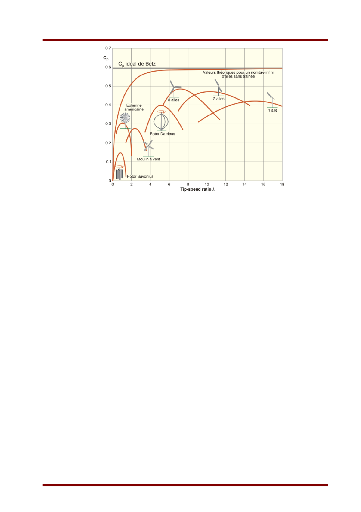
Les éoliennes à marche lente sont munies d'un
grand nombre de pales (entre 20 et 40), leur inertie importante impose en
général une limitation du diamètre à environ 8 m.
Leur coefficient de puissance représentée dans la figure I.12,
atteint rapidement sa valeur maximale lors de la montée en vitesse mais
décroît également rapidement par la suite. Les
éoliennes à marche rapide sont beaucoup plus répandues et
pratiquement toutes dédiées à la production
d'énergie électrique elles possèdent
généralement entre 1 et 3 pales fixes ou orientables pour
contrôler la vitesse de rotation. Les pales peuvent atteindre des
longueurs de 60 m pour des éoliennes de plusieurs mégawatts.
[1]
Les éoliennes tripales sont les plus utilisées
car elles représentent un inconvénient entre les vibrations
causées par la rotation et le coût de l'éolienne. De plus,
leurs coefficients de puissance comme le montre la figure 1-12 atteint une
valeur plus élevée et diminue lentement quand la vitesse
augmente. Ils fonctionnent à une vitesse du vent plus
élevée que 3 m / s.
17
Chapitre I : État de l'art des systèmes
éoliens.
Figure I.12-Évolution typique du rendement
aérodynamique en fonction de la vitesse relative X et du modèle
d'éolienne [15]
I.8.2 Conversion de l'énergie cinétique du
vent en énergie électrique
Le principe de conversion de l'énergie
cinétique en énergie électrique est
représenté sur la figureI.13.
Au niveau de la nacelle le mouvement du rotor est transmis
à l'arbre long, la vitesse de rotation de l'arbre long est
augmentée par le multiplicateur c'est la boite de vitesse de
l'éolienne, le générateur fonctionne sur le principe de la
dynamo il convertit l'énergie cinétique en énergie
électrique.
Le freint permet de stopper le mouvement du rotateur il est
utilisé qu'en cas d'urgence, sur le toit se trouve les capteurs pour le
pilotage de l'éoliennes.
Les grandes éoliennes à axe horizontal
regroupée dans un parc éolien. Son hauteur est d'une centaine de
mettre pour un diamètre d'environ 50m. Les plus grandes qui sont les
plus puissante peuvent dépasser 120m de diamètre, la hauteur du
mat est primordiale pour capter le vent et optimisé la production de
l'énergie électrique. Le rotor et le stator se trouve dans la
nacelle située en haut du mat qui est orientable pour suive la direction
du vent. L'électricité produite est acheminée par
câble jusqu' au transformateur situé en bas du mat qui permet
d'augmenter la tension de sortie. L'éolienne peut ainsi injecter dans le
réseau électrique un courant alternatif en
18
Chapitre I : État de l'art des systèmes
éoliens.
20 000V dans le domaine de haute tension.
L'électricité est convertie en basse tension à travers des
postes de basse tension.
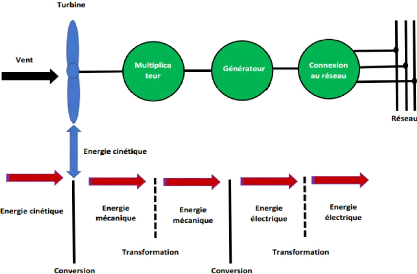
Figure I.13-Chaine de conversion d'une éolienne
[16].
I.8.3 Les différentes topologies d'alimentation
de la MADA
I.8.3.1 MADA à énergie rotorique
dissipé
Cette configuration à vitesse variable est
représentée par la (figure I.14), le stator est relié
directement au réseau, alors que le rotor est connecté au
redresseur. Une charge résistive est reliée au redresseur
à travers d'un hacheur à IGBT ou GTO. Afin de fonctionner en
vitesse variable tout en restant dans la partie stable de la
caractéristique couple/vitesse de la machine asynchrone à double
alimentation et varier l'énergie dissipé ; le contrôle de
l'IGBT est primordial. [17].
19
Chapitre I : État de l'art des systèmes
éoliens.
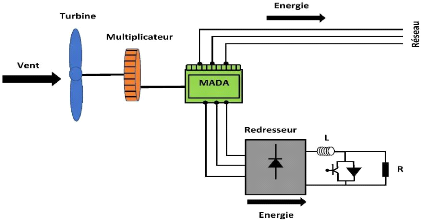
Figure I.14-MADA avec contrôle du glissement par
l'énergie dissipée [18].
I.8.3.2 MADA structure de Kramer
Afin de minimiser les pertes d'énergie dues à
la configuration précédente, le hacheur et la charge
résistive sont remplacés par un onduleur qui renvoie
l'énergie de glissement vers le réseau comme le montre la figure
I.15.
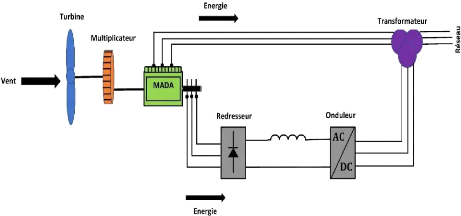
Figure I.15-Structure de Kramer [18].
L'association du redresseur et de l'onduleur son
dimensionné en fonction de la puissance nominale de la machine, cette
configuration peut être avantageuse que si la taille des convertisseurs
peut être réduite para port à la puissance nominale de la
machine. Les thyristors utilisé dans
20
Chapitre I : État de l'art des systèmes
éoliens.
l'onduleur nuit au facteur de puissance. Le redresseur permet
uniquement de transférer l'énergie du rotor de la machine vers le
réseau, cela rend le système non producteur d'énergie que
si la vitesse de rotation est supérieure au synchronisme. Dans cette
configuration le glissement est maintenu inférieur à 30% [1].
I.8.3.3 MADA structure de Scherbius avec cyclo
convertisseur
Afin de permettre un échange de flux d'énergie
bidirectionnel entre le rotor et le réseau, la combinaison entre le
redresseur et onduleur peut être remplacée par un cyclo
convertisseur (figure 1-16), cette architecture est appelée structure de
Scherbius [1].
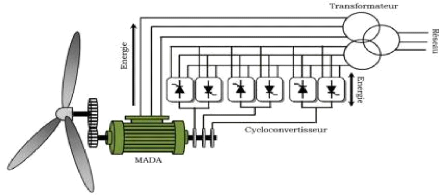
Figure I.16-Structure de Scherbius avec cyclo convertisseur.
[18]
Afin de maintenir un fonctionnement optimal du
système, les variations du glissement doivent être
inférieures à 30%, si ces variations son positives alors le
système va fonctionner en mode hypo synchrone et si ces variations son
négative alors le système vas fonctionner en mode hyper synchrone
[18].
Le principe du cyclo convertisseur est de prendre des
fractions des tensions sinusoïdales du réseau afin de reproduire
une onde de fréquence inférieure génère par
conséquent des perturbations harmoniques importantes qui nuisent au
facteur de puissance du dispositif [1]. Les progrès de
l'électronique de puissance ont conduit au remplacement du cyclo
convertisseur par une structure à deux convertisseurs à IGBT
commandés en MLI [1] .
I.8.3.4 MADA structure de Scherbius avec convertisseur
MLI
Cette structure est représentée dans la figure
I.17 elle a les mêmes caractéristiques que la structure de
Scherbius avec cyclo convertisseur. Contrairement à la structure
citée précédemment
21
Chapitre I : État de l'art des systèmes
éoliens.
cette structure utilise deux ponts triphasés d'IGBT
commandables à l'ouverture et à la fermeture et leur
fréquence de commutation est plus élevée que celle des GTO
[17].
Le gain se répercute sur des perturbations moins
importantes (rejet des premiers harmoniques non nuls vers les fréquences
élevées par la commande MLI grâce à la
commandabilité du convertisseur rotorique la MADA peut fonctionner en
mode hypo et hyper synchrone le contrôle du facteur de puissances pourras
être établie. [17]

Figure I.17-Structure de Scherbius avec convertisseurs MLI.
[18]
I.9 Avantages et inconvénients des
systèmes d'énergie éolienne :
L'énergie éolienne offre de nombreux avantages,
ce qui explique pourquoi elle est la source d'énergie qui connaît
la plus forte croissance dans le monde. Les efforts de recherche visent
à relever les défit pour accroître l'utilisation de
l'énergie éolienne.
I.9.1 Avantages :
Les systèmes d'énergie éolienne sont
alimentés en énergie par le vent qui circule naturellement, peut
être considérée comme une source d'énergie propre.
L'énergie éolienne ne pollue pas l'air comme les centrales
électriques qui utilisent des combustibles fossiles, tels que le charbon
ou le gaz naturel. Les éoliennes ne produisent pas d'émissions
atmosphériques à l'origine des pluies acides ou des gaz à
effet de serre.
L'énergie éolienne est disponible en tant que
source d'énergie domestique dans le monde entier et n'est pas
limitée à quelques pays seulement, comme c'est le cas pour le
pétrole.
22
Chapitre I : État de l'art des systèmes
éoliens.
L'énergie éolienne est l'une des technologies
d'énergie renouvelable les moins chères disponibles
aujourd'hui.
Les éoliennes peuvent également être
construites sur des fermes ou des ranchs, ce qui profite à
l'économie dans les zones rurales, où se trouvent la plupart des
meilleurs sites éoliens. Les agriculteurs et les éleveurs peuvent
continuer à utiliser leurs terres car les éoliennes n'utilisent
qu'une petite fraction du terrain [19].
I.9.2 Inconvénients :
L'énergie éolienne doit concurrencer les
sources de production d'énergie conventionnelles sur la base des
coûts. Selon le profil du vent sur le site, le parc éolien peut
être ou non être aussi compétitif qu'une centrale à
combustible fossile. Même si le coût de l'énergie
éolienne a diminué au cours des 10 dernières
années, cette technologie nécessite un investissement initial
plus élevé que les centrales à combustible fossile.
Le défi majeur de l'utilisation du vent comme source
d'énergie est que le vent est intermittent et qu'il ne souffle pas
toujours selon les besoins en électricité. L'énergie
éolienne ne peut pas être stockée et tous les vents ne
peuvent pas être exploités pour répondre à la
demande d'électricité.
L'option de stockage de l'énergie dans des batteries
est au-delà des limites de la faisabilité économique pour
les grandes éoliennes.
Les bons sites d'éoliennes sont souvent situés
dans des endroits éloignés, loin des villes où
l'électricité est nécessaire. Dans les pays en voie de
développement, il y a toujours le coût supplémentaire pour
connecter les parcs éoliens éloignés au réseau
d'approvisionnement.
Le développement des ressources éoliennes peut
entrer en concurrence avec d'autres utilisations des terres et ces autres
utilisations peuvent être plus valorisées que la production
d'électricité.
Bien que les centrales éoliennes aient un impact
relativement faible sur l'environnement par rapport à d'autres centrales
électriques conventionnelles, le bruit produit par les pales du rotor et
les impacts esthétiques (visuels). La plupart de ces problèmes
ont été résolus ou considérablement réduits
grâce au développement technologique ou en plaçant
correctement les centrales éoliennes [19]
23
Chapitre I : État de l'art des systèmes
éoliens.
I.10 Conclusion
Ce chapitre a été consacré à la
description de l'énergie éolienne dans son état
général, nous avons cités l'origine de l'énergie
éolienne, ses principaux composants ainsi que les type d'éolienne
qui existe dans le monde. On a aussi abordé quelques notions de
conversion de l'énergie cinétique et le contrôle de la
vitesse des éoliennes.
Afin de mieux comprendre le processus de conversion de
l'énergie éolienne et d'analyser cette conversion, le chapitre
suivant est consacré à la modélisation des
différents éléments qui compose la chaine de conversion de
l'énergie éolienne.
24
Chapitre II : Modélisation et
commande de l'éolienne
25
Chapitre II : Modélisation et commande de
l'éolienne
II.1 Introduction
Afin de bénéficier et de mieux profité
des avantages de l'énergie éolienne en termes d'énergie
propre et inépuisable, l'énergie cinétique du vent doit
être convertie en énergie électrique et pour cela toute une
chaine de conversion est mise à disposition.
Cette chaine de conversion est composée de plusieurs
éléments importants comme la turbine éolienne, le
générateurs et les convertisseurs de l'électronique de
puissance.
Pour que cette chaine de conversion soit parfaitement
fonctionnelle et contrôlée, la modélisation des
éléments constituants cette dernière est primordiale. Dans
le cadre de nos travaux, nous avons choisi d'étudier une éolienne
à vitesse variable.
Ainsi, dans ce deuxième chapitre nous allons en
premier temps, nous intéresser à la modélisation de la
partie mécanique de la chaine de conversion de l'éolienne qui est
la turbine et ses composant, ensuite nous allons présenter la
stratégie de commande de l'éolienne. A la fin de ce chapitre, les
résultats de simulation et une conclusion seront
présentés.
II.2 Modélisation du vent
Le vent est l'élément essentiel pour faire
fonctionner une éolienne, c'est pour cela qu'il est primordial de
connaitre son modèle mathématique. La vitesse du vent est une
fonction scalaire qui évolue dans le temps V = ??(??) La
définition du modèle nécessite des données
géographiques et climatiques du site concerné, ainsi que la
période de la saison concernée par l'étude.
Généralement le modèle du vent est exprimé par une
équation en série de Fourier qui le présente comme un
signal constitué par une superposition de plusieurs harmoniques, il est
donné par l'équation suivante :
[20].
??
V??(??) = A + ? ??????i??(??????)
??=1
Avec :
A : la valeur moyenne de la vitesse du vent. ????
: amplitude de l'harmonique de l'ordre k. ???? : pulsation de
l'harmonique de l'ordre k.
i : le rang du dernier harmonique retenu dans le calcul
du profil du vent.
26
|
(II.1)
|
|
Chapitre II : Modélisation et commande de
l'éolienne
II.3 Modélisation de la turbine
La figure II.1 représente le schéma global d'une
turbine éolienne.
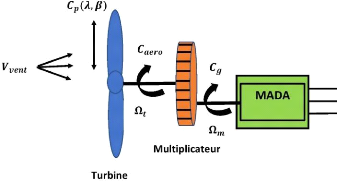
Figure II-1. Structure d'une turbine éolienne.
Similaire aux ailes d'avions, la forme aérodynamique
des pales modifie la vitesse du vent sur l'extrados et l'intrados des pales. La
différence de vitesse produit une différence de pression, donc
une force portante est générée.
La puissance du vent est donnée par l'équation
II.2
????=
|
1
2 ?? S ??????????
3
|
(II.2)
|
|
Avec :
??: est la densité de l'air en ????/??3 (au
niveau de la mer et à 20C° :?? = 1.225????/??3). ????:
Est le coefficient de puissance de la turbine.
S : la surface circulaire balayée par la turbine.
?????????? :la vitesse du vent.
La puissance aérodynamique captée par une turbine
est donnée par :
27
Chapitre II : Modélisation et commande de
l'éolienne
?????????? =
|
1
2 ?? ???? S ??????????
3
|
(II.3)
|
|
Avec :
????: Le coefficient de puissance de la turbine.
????(??, ??) 1
|
116
=
|
0.4
|
??
|
-
|
5)??
|
-21
|
(II.4)
(II.5)
|
|
|
|
0.08?? ??3 + 1
|
|
Avec :
?? : Angle d'inclinaison des pales. ?? : Ratio de la vitesse.
La figure II.2 représente la variation du
paramètre ???? en fonction du ratio de vitesse ?? et de l'angle de
l'orientation de pale ??.
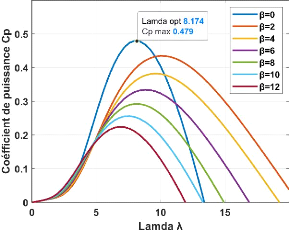
Figure II.2-Coefficient de puissance et vitesse relative pour
différents angles de calages.
D'après la figure II.2 obtenu on remarque que quand
l'angle d'orientation de pale ?? augmente, le coefficient de puissance ?? ??
diminue, la valeur maximale de ?? ?? d'après la figure
28
Chapitre II : Modélisation et commande de
l'éolienne
obtenue est de ????_?????? = 0.48 ,cette valeur correspond
à un angle d'orientation de pale égale à ?? = 0 et une
valeur optimale de la vitesse ???????????? = 8.1 .
Afin de maintenir ë à sa valeur nominale ou
optimale, et donc maximiser la puissance de la turbine éolienne, il est
donc impérativement important de varier la vitesse de rotation ???? de
manière linéaire avec la vitesse du vent. L'équation (I.3)
deviens alors :
???????? =
|
?? .??????????
??????????
|
(II.6)
|
|
Avec :
R : rayon des pales.
Le couple aérodynamique est exprimé en fonction
de la puissance aérodynamique et la vitesse de rotation de la turbine
comme le montre l'équation I.7:
????????
???????? = ????????
|
1 (II.7)
2 ?????? ?? ??2 ??????????
3 1
????????
|
|
II.4 Modélisation du multiplicateur
Le multiplicateur est représentée sur la figure
II-3 est l'élément qui se situe entre la turbine et le
générateur. Sa fonctionnalité est le réglage de la
vitesse de la turbine ???? qui est lente à la même vitesse de la
génératrice ???? .
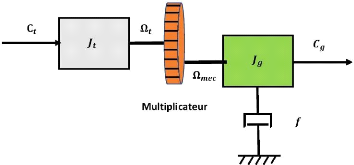
Figure II-3. Modèle d'un multiplicateur [21]
29
Chapitre II : Modélisation et commande de
l'éolienne
Le multiplicateur est représentée sur la figure
II-3 est l'élément qui se situe entre la turbine et le
générateur. Sa fonctionnalité est le réglage de la
vitesse de la turbine ???? qui est lente à la même vitesse de la
génératrice ???? .
En négligeant les pertes mécaniques sont
négligeables, le multiplicateur peut être modélisé
mathématiquement par l'équation suivante :
???????? = ??. ????
Avec :
?? : gain du multiplicateur.
|
(II.8)
|
|
II.5 Modélisation de l'arbre
mécanique
L'arbre mécanique est composé d'une masse
correspondant à l'inertie du rotor de la
turbine la figure II.5
représente modèle de transmission mécanique ramenée
à l'arbre mécanique.
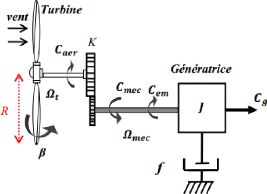
Figure II-4. Modèle de transmission mécanique
ramenée à l'arbre Mécanique [22]
Dans le modèle mécanique proposé dans la
figure II .4, l'inertie totale ?? est celle du générateur ???? et
l'inertie de la turbine ???? ramenée sur l'arbre rapide (au rotor du
générateur) où : [22]
??= ????+ ???? ??2 (II.9)
Le couple mécanique appliqué au rotor de la
génératrice est exprimée par :
30
|
Chapitre II : Modélisation et commande de
l'éolienne
|
|
????????
????????
???? -
|
???? ??????
|
????????
+ ??????????
|
(II.10)
(II.11) (II.12)
|
|
|
|
Avec :
???????? : La vitesse mécanique.
???????? : Le couple mécanique appliqué au
rotor de la génératrice.
???????? : Le couple de frottement visqueux.
???? : Le couple du multiplicateur de vitesse.
?? : Coefficient de frottement visqueux.
?? : Inertie totale.
La figure II.5 représente Le schéma bloc
correspondant à la modélisation de la turbine
modélisée.
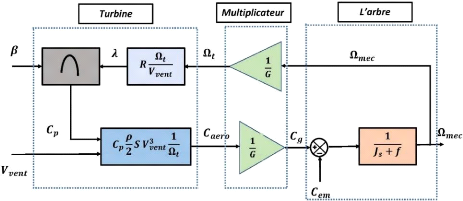
Figure II-5. Schéma bloc de la turbine
modélisée. [2]
II.6 Stratégie de commande de
l'éolienne
Le contrôle de l'éolienne se fait à
travers deux boucles de régulation ; boucle de régulation de la
vitesse et la boucle de régulation de la puissance.
31
Chapitre II : Modélisation et commande de
l'éolienne
A travers la boucle de régulation de la vitesse la
vitesse de rotation est contrôlée par le couple
électromagnétique, cette boucle de régulations est la
boucle principale dans la stratégie de d'optimisation de puissance. La
vitesse de rotation est ajustée dans cette boucle afin d'extraire le
maximum de la puissance du vent quand la vitesse du vent va dépasser la
vitesse nominale et l'angle de calage vas être maintenue constant a une
valeur optimale ????????.
La boucle de régulation de vitesse réagit
instantanément en adaptant la puissance de référence de la
génératrice en agissant sur le dispositif d'orientation des pales
afin de contrôlée le couple électromagnétique et la
vitesse de rotation. Cette action est enclenché que quand la vitesse de
rotation va augmenter rapidement suite à des rafales de vent et peut
dépasser la vitesse de rotation des pales.
II.6.1 Systèmes de régulation de la
vitesse de rotation de l'éolienne
II.6.1.1 Système à décrochage
aérodynamique "Stall"
Ce système de régulation est
représenté par la figure II-6, il est simple et relativement
fiable mais il manque de précision car il dépend de la masse
volumique de l'air et de la rugosité des pales donc de leur état
de propreté. Il peut dans certains cas, être
amélioré en autorisant une légère rotation de la
pale sur elle-même (système "Stall actif") permettant ainsi de
maximiser l'énergie captée pour les faibles vitesses de vent.
Pour les fortes vitesses de vent, la pale est inclinée de façon
à diminuer l'angle de calage â et renforcer ainsi l'effet "stall"
de la pale. La répercussion des variations de vitesse de vent sur le
couple mécanique fournie par l'éolienne est ainsi moins
importante [23].
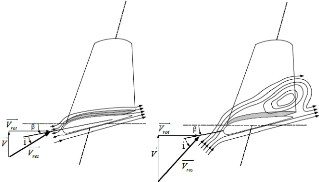
Figure II-6. Flux d'air sur un profil de pale " Stall "
[23]
32
Chapitre II : Modélisation et commande de
l'éolienne
II.6.1.2 Système d'orientation des pales
"Pitch"
Le système d'orientation des pales agit sur la portance
des pales pour garder la puissance autour de sa valeur nominale [24]. En
réglant l'angle de calage, on agit sur les performances de
l'éolienne et plus précisément sur le coefficient de
puissance.
Le système d'orientation des pales génère
alors un angle de calage de référence : ????????. La dynamique de
l'actionneur pitch est généralement décrite par la
fonction de transfert de premier ordre suivante [25].
1
?? = 1 + ?????? ????????
Avec :
|
(II.13)
|
|
ô??: Constante du temps du système actionneur
pitch. ?? : Angle de calage des pales.
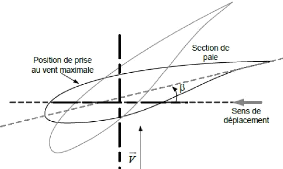
Figure II-7. Variation de l'angle de calage d'une pale
[23]
Lors de la modélisation du système
d'orientation des pales, il est essentiel de modéliser la vitesse de
variation de cet angle [24]. En effet, compte tenu des efforts subis par les
pales, la variation de l'angle de calage doit être limitée
à 10%. La valeur de saturation de l'angle de calage en position est de
90°, cette valeur correspond à la mise en drapeau des pales
[24].
L'agitation sur l'angle de calage des pales entraine la
modification des performances du système, et plus
précisément sur le coefficient de puissance ????, les pales sont
face au vent pour les basses vitesses (?? = 0°), pour des vitesses plus
importantes du vent les pales s'inclinent afin de dégrader le
coefficient de puissance ???? [2].
33
Chapitre II : Modélisation et commande de
l'éolienne
II.7 Zone de fonctionnement de l'éolien
:
Les éoliennes fonctionnent dans une plage de vent
très variables. Une vitesse de vent spécifique est
nécessaire afin que les pales de l'éolienne puissant
surmonté l'inertie et la friction. On appel cette vitesse la vitesse du
vent de démarrage ???? ,la vitesse du vent est évaluée en
moyenne de 3 à 5 m/s afin d'éviter d'endommager les pales de
l'éolienne, il est recommandé d'utiliser une vitesse
d'entrée de 25 m/s [8].
Les différentes zones de fonctionnement d'une
éolienne sont illustrées à travers la figure II.8, on
distingue quatre zones de fonctionnement :
Zone I : :la puissance captée est
très faible à cause de la faible vitesse du vent.
Zone II : dans cette zone la vitesse du vent
est supérieure à la vitesse de seuil et inférieure
à la vitesse nominale de l'éolienne. Dans cette partie qui est
caractérisée par une puissance proportionnelle au cube de la
vitesse du vent, l'angle de calage est maintenu constant, et c'est le
contrôle du couple électromagnétique de la
génératrice qui va être mis en oeuvre (principe de MPPT).
Ceci se fait en gardant le coefficient de puissance ???? = ?????????? de
manière à tirer le maximum de profit de la vitesse du vent et
généré le maximum d'énergie électrique
possible. Dans cette zone, la courbe de puissance de la
génératrice suit une progression rapide [8].
Zone III : Dans cette zone la vitesse de
vent est supérieure à la vitesse nominale et inférieure
à la vitesse maximale de déclenchement, le coefficient de
puissance ?? ?? doit être contrôlé. L'augmentation de la
vitesse de vent va s'accompagner d'une diminution du coefficient ?? ?? et d'une
augmentation moins rapide de la puissance récupérée.
Lorsque la puissance maximum de la génératrice est atteinte,
l'angle des pales (pitch) est modifié afin de dégrader encore
plus le coefficient Cp. [8, 26]
Zone IV : la vitesse de vent devient trop
forte et dans laquelle le système de sûreté du
fonctionnement arrête la rotation et le transfert de l'énergie
afin d'éviter tout disfonctionnement ou dégât [8] .
34
Chapitre II : Modélisation et commande de
l'éolienne
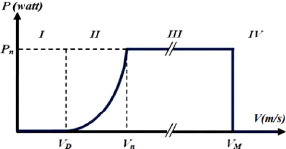
Figure II-8. Courbe de la puissance éolienne en fonction
de la vitesse du vent [8]
II.8 Principe de contrôle MPPT (Maximum Power
Point Tracking)
Le système de contrôle le plus répandu
des éoliennes traditionnelles directement connectées au
réseau électrique de distribution, est basé principalement
sur la technique d'extraction du maximum de puissance (MPPT) et ce sans
supervision centralisée. [18]
Le principe de la stratégie MPPT consiste à
contrôler la vitesse de rotation de la turbine éolienne en
fonction de la vitesse du vent, en fonction de la vitesse du vent de rotation
de la turbine éolienne est maintenue à une valeur de
référence pour maintenir une vitesse relative optimale et donc un
coefficient de puissance maximal Cpmax [18].
Lorsqu'un problème technique ou la présence
d'éventuel défaut sur la commande MPPT, un dispositif
déconnecte immédiatement l'éoliennes du réseau
electrique.la commande MPPT ne peut
en aucun cas intervenir au contrôle de la production de la puissance en
temps réel.On distingue deux types de commande :
· Le contrôle MPPT sans asservissement de la vitesse
mécanique.
· Le contrôle MPPT avec asservissement de la vitesse
mécanique.
II.8.1 Maximisation de la puissance sans asservissement
de vitesse :
Ce mode de contrôle repose sur l'hypothèse que
la vitesse du vent varie très peu en régime permanent devant les
constantes de temps électriques du système éolien [27], ce
qui implique que le couple d'accélération de la turbine peut
être considéré comme nul.
C
't l dflm (II.18)
G2 + 'm)
dt + Îvflm = Cm - Cem = 0 35
Chapitre II : Modélisation et commande de
l'éolienne
La figure II.9 représente le schéma bloc de la
maximisation de la puissance sans asservissement de la vitesse
mécanique.
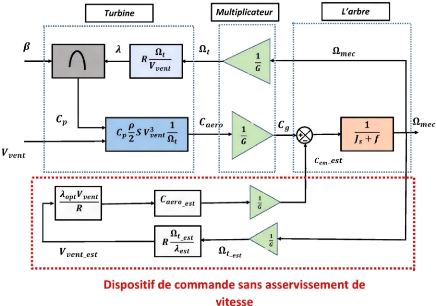
Figure II.9- Schéma bloc de la maximisation de la
puissance sans asservissement de la
vitesse mécanique. [28]
Une estimation de la vitesse de rotation de la turbine,
notée ???-??????, est obtenue à partir de la mesure de la vitesse
de rotation de la MADA et donné par l'équation II.19 :
???
???_?????? = ??
|
(II.19)
|
|
Le couple de la turbine éolienne peut ensuite
être obtenu à partir des estimations de la vitesse du vent et de
la vitesse de rotation de la turbine. Il peut s'exprimer par :
??. ?? 1 (II.20)
????_?????? = ????. 2 . ???_?????? - ?????????? _??????
3
Le couple électromagnétique de
référence est alors obtenu à partir de l'estimation du
couple de la turbine éolienne :
???* ??? =
|
????_??????
|
(II.21)
|
|
|
|
36
Chapitre II : Modélisation et commande de
l'éolienne
Afin d'extraire le maximum de puissance, il faut fixer la
vitesse relative à sa valeur optimale Aopt afin d'obtenir le
coefficient de puissance maximum Cpmax le couple
électromagnétique de référence s'exprime donc par
l'équation II.22 :
Ce*?m = K. SZm2?
(II.22)
Où K est une constante définie par :
II.8.2 Maximisation de la puissance avec asservissement
de la vitesse
Le vent est une grandeur stochastique, de nature très
fluctuante. Cette fluctuation engendre des perturbations dans le système
de conversion éolien, et crée des variations continues de
puissance. De cet effet, il est supposé que le couple
électromagnétique développé par la machine soit
égal à sa valeur de référence quel que soit la
puissance générée [20].
Le couple électromagnétique Cem
produit par la MADA est donc à tout instant égal à sa
valeur de référence Cem * imposée par la
stratégie de commande [21].
Cem = Cem-ref (II.14)
Cem-rref = Cass (
·aref -
·amec)
(II.15)
Avec :
Cass : régulateur de vitesse
S1re f : vitesse mécanique de
référence
La vitesse mécanique de référence
dépend de la vitesse de la turbine afin de maximiser la puissance
extraite. La vitesse mécanique de référence est
exprimée par l'équation suivante :
· aref = G.
·atur-ref
(II.16)
Avec :
G : gain du multiplicateur.
37
Chapitre II : Modélisation et commande de
l'éolienne
La référence de la vitesse de la turbine
correspond à la valeur optimale du ratio de vitesse Aopt
permettant d'obtenir la valeur maximale du coefficient de puissance
Cp. On peut déduire [20]:
ftur-ref =
|
ACpmax. event
R
|
(II.17)
|
|
La figure II.10 représente le schéma bloc de la
maximisation de la puissance avec asservissement de la vitesse
mécanique.
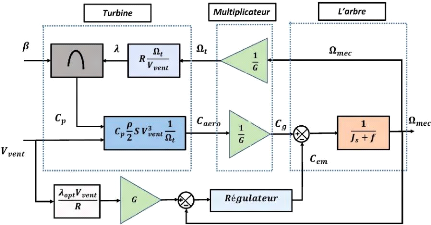
Figure II-10. Schéma bloc de la maximisation de la
puissance avec asservissement de la vitesse mécanique [28]
· Synthèse du régulateur
PI
Un correcteur PI a été choisie afin de
réguler notre système, ce correcteur a pour fonction de transfert
: kpu, + kP .
On peut exprimer la fonction de transfert qui lie la vitesse
aux couples électromagnétique et au couple mécanique
à partir de l'équation de la mécanique régissant la
dynamique des corps en rotation par :
38
Chapitre II : Modélisation et commande de
l'éolienne
La figure II.11 représente le schéma bloc de la
régulation de vitesse :
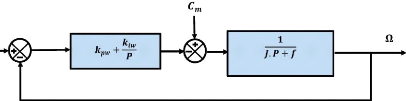
Figure-II.11- Schéma bloc de la régulation de
vitesse avec régulateur PI.
On peut exprimer la fonction de transfert du système en
boucle ouverte par l'équation suivante :
?????? =
|
Ù
= Ù*
|
??????. ?? + ??????
??.??2 + ??. ??
|
(II.19)
|
|
La fonction de transfert de la vitesse en boucle fermée
est donnée par :
?????? =
|
??????. ?? + ??????
??
|
(II.20)
|
|
|
|
Cette fonction de transfert est de la dynamique du
deuxième ordre, sa forme canonique est donnée
par :
??(??) = ??2 + 2??. ?????? + ????2
2. ??. ?????? + ???? 2 (II.21)
Avec :
?? : le coefficient d'amortissement.
???? : la pulsation propre.
Après identification de l'équation II.20 avec
l'équation II.21 on obtiens :
2 ?? ????=
|
?????? + ??
??
|
(II.22)
|
|
??????
??
???? 2 =
D'après l'équation II.22 les paramètres du
régulateur PI auront pour expression :
39
Chapitre II : Modélisation et commande de
l'éolienne
{
?????? = 2 ?? ???? ?? - f (II.23)
?????? =
?? ???? 2
II.9 Résultat de simulation
La figure II.12 représente le profil du vent
appliqué à travers notre étude. Ce dernier est
caractérisé par l'équation suivante :
?????????? = 8.5 + 0.2 sin(0.1047t) + 2 sin(0.2665t) +
sin(1.2930t) + 0.2sin (3.6645t)
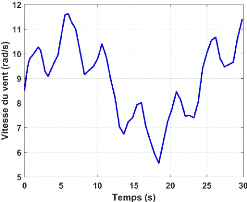
Figure II.12- Profil du vent appliqué.
Dans cette section de chapitre la simulation de la partie
mécanique de la chaine de production ;
l'aérogénérateur avec s'est différente commande
MPPT avec et sans asservissement de la vitesse mécanique qui on
était citée dans les paragraphes précèdent vont
être simuler afin d'analyser la meilleure commande MPPT possible, les
simulations on était réalisé sans raccordée
l'éolienne à la génératrice.
Les deux simulations on était effectuée sous le
logiciel MATLAB/Simulink en considérant les paramètres suivants
:
Tableau II-13. Paramètre nominal de la simulation de la
partie mécanique.
Angle de calage ??
|
0
|
Ratio de vitesse A??????
|
8.1
|
Coefficient de puissance
maximal ????_??????.
|
0.48
|
Vitesse moyenne du vent
|
8.5m/s
|
|
40
Chapitre II : Modélisation et commande de
l'éolienne
Les paramètres de la turbine éolienne
utilisée dans ce travail et sa structure implémenté sous
MATLAB/Simulink sont représenté dans l'annexe A et l'annexe B
respectivement.
II.9.1 Résultats de simulation de la turbine avec
asservissement de la vitesse mécanique
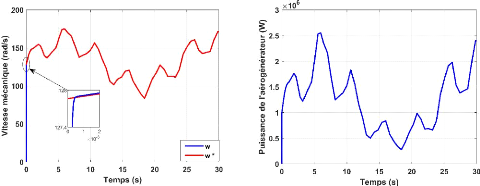
Figure II.13. (a)-Vitesse de rotation mécanique. Figure
II.13. (b)-Puissance de l'aérogénérateur
produite.
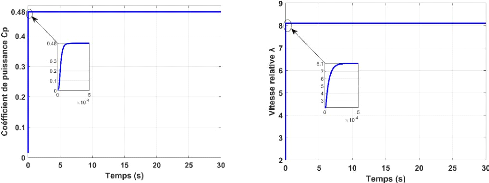
Figure II.13. (c)-Coefficient de puissance C??. Figure
II.13. (d)-Vitesse relative A.
41
Chapitre II : Modélisation et commande de
l'éolienne
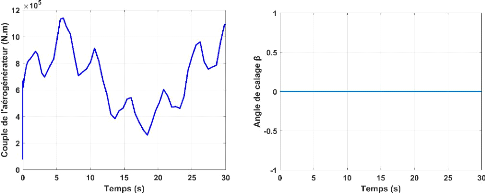
Figure II.13. (e)-Couple électromagnétique de
Figure II.13. (f)-Angle de calage ??.
l'aérogénérateur.
Figure II.13-Resultat de simulation de la commande MPPT avec un
asservissement de la vitesse
mécanique.
· Interprétation des
résultats
Les résultats de la simulation de la méthode de
contrôle MPPT avec un asservissement de vitesse mécanique à
l'aide d'un régulateur PI son représenté par la figure II
.13.
Les figure II.13.b. et II.13.e. illustre respectivement la
puissance de l'aérogénérateur et le couple de
l'aérogénérateur. D'après la figure II.12. On
constate une nette influence de la variation de la vitesse du vent sur le
couple et la puissance généré par
l'aérogénérateur. Cette influence varie
proportionnellement à la vitesse de variation du vent
Le coefficient de puissance C ?? et la vitesse relative
évolue jusqu'à ce qu'il atteigne leurs valeurs maximales de C ??
= 0.48 et ???????? = 8.1 sans dépassement pour un angle de calage
â=0° comme le montre les figures II.13c et II13d respectivement.
La vitesse de rotation mécanique (figure.II.13.a)
varie au cube de la vitesse de variation du vent et suit parfaitement sa
consigne imposée ceci est dû au contrôle du
régulateur PI.
II.9.2 Résultats de simulation de la turbine
sans asservissement de la vitesse mécanique
42
Chapitre II : Modélisation et commande de
l'éolienne
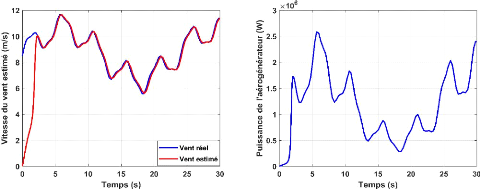
Figure II.14. (a)-Vitesse du vent estimée et Figure
II.14. (b)-Puissance de l'aérogénérateur
mesuré. produite.
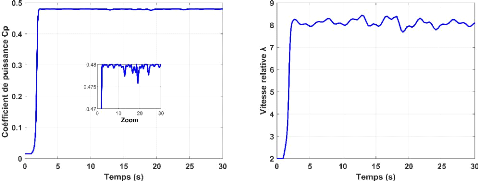
Figure II.14. (c)-Coefficient de puissance C??. Figure
II.14. (d)-Vitesse relative A.
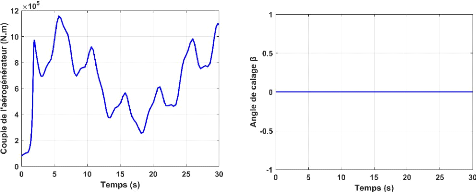
Figure II.14. (e)-Couple électromagnétique Figure
II.14. (f)-Angle de calage ??.
43
Chapitre II : Modélisation et commande de
l'éolienne
Figure II.14-Resultat de simulation de la commande MPPT sans
un asservissement de la vitesse
mécanique.
· Interprétation des
résultats
Les résultats de la simulation de la méthode de
contrôle MPPT sans un asservissement de vitesse mécanique sont
représenté sur la figure II .14.
La puissance et le couple aérodynamique
illustré respectivement dans Les figure II.14.b. et II.13.e, varient
proportionnellement avec la variation du profil du vent (figure II.12). Le
coefficient de puissance C ?? et la vitesse relative évolue
jusqu'à ce qu'il atteigne leurs valeurs maximales de C?? = 0.48 et
???????? = 8.1 pour un angle de calage ?? = 0° avec un temps de
réponse au démarrage comme le montre les figures II.13.c, II.13.d
et II.13.f..
La vitesse du vent mesuré suit la vitesse du vent
estimé avec une erreur statique importante en régime permanant
comme la montre la Figure II.14.a, ceci est dû à l'absence du
contrôle du régulateur PI.
II.10 Conclusion
Dans ce chapitre, nous avons tout d'abord
procédé à la modélisation de la turbine
éolienne a vitesse variable basée sur une machine asynchrone a
double alimentation (MADA), de la modélisation du vent jusqu'au
multiplicateur.
En premier temps, nous avons présenté dans ce
chapitre les différents modes de régulation de vitesse de
rotations de l'éolienne, les zone de fonctionnement d'une turbine
éoliennes a vitesse variable ont également été
présentée dans cette partie de chapitre.
En deuxième temps nous avons présentée
l'algorithme de maximisation de puissance MPPT , utilisé dans le
système éolien étudié, à l'aide d'un
asservissement de vitesse contrôlé par un régulateur de
type PI (proportionnel intégral), dont les paramètres sont
calculés par la méthode analytique.
En fin, la simulation et la présentation des
résultats obtenue d'un asservissement avec contrôle de la vitesse
on était présentée.
Le chapitre suivant est consacré à la
présentation et la modélisation de la partie électrique de
la chaine de conversion d'une éolienne qui est basée sur une
machine asynchrone à double alimentation, les convertisseurs statiques
seront également présentés et modélisé.
44
Chapitre III : Modélisation de
la MADA et des convertisseurs
Statiques.
45
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
III.1 Introduction
Afin de compléter la chaine de conversion et de produire
de l'énergie électrique un générateur est
essentiels pour convertir l'énergie mécanique produite par
l'éolienne en énergie électrique et injectée aux
réseaux.
Il existe plusieurs types de générateurs dans
l'industrie, la génératrice électrique la plus
utilisée dans les systèmes éoliens à vitesse
variable de forte puissance est la génératrice électrique
de type machine asynchrone à rotor bobiné, qui est couramment
appelé Machine Asynchrone à Double Alimentation (MADA), car cette
dernière a l'avantage d'être facialement contrôlée et
présente des performances intéressantes.
Nous allons nous intéresser en premiers temps à
la modélisation de la machine asynchrone a double alimentation. Ensuite
afin d'injectée l'énergie électrique produite par le
générateur la nécessiter des convertisseurs de
l'électronique de puissance son primordial pour cela la
modélisation de ces dernier son présenté dans la
dernière partie de ce chapitre ainsi qu'une conclusion.
III.2 Description de la MADA
La machine asynchrone à double alimentation MADA, est
un générateur à rotor bobiné. La figure III.1
représente la structure d'une MADA connectée au réseau
triphasé. Les enroulements du stator sont reliés au réseau
à travers deux convertisseurs de puissance bidirectionnels en courant.
La puissance traversant ces convertisseurs peut alors être
absorbée ou produite par la machine selon le mode de fonctionnement, le
bus continu représenté ici : le condensateur entre ces deux
convertisseurs et un transformateur élévateur de tension qui
permet le raccordement au réseau de distribution [29].
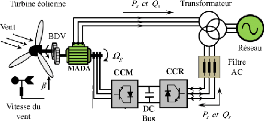
Figure III-1.Structure d'une MADA connectée au
réseau [30]
46
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
III.3 Mode de fonctionnement de la MADA
La machine asynchrone à double alimentation (MADA)
peut fonctionnée en 4 mode possible selon la vitesse de synchronisme.
III.3.1 Fonctionnement en moteur
hypo-synchrone
Le fonctionnement en mode moteur hypo synchrone de la MADA
est représenté par la figure III.2. On remarque que la puissance
est fournie par le réseau au stator et la puissance de glissement passe
par le rotor pour être réinjectée au réseau. On a
donc un fonctionnement moteur en dessous de la vitesse de synchronisme. La
machine asynchrone à cage classique peut fonctionner ainsi mais la
puissance de glissement est alors dissipée en pertes Joule dans le rotor
[31].
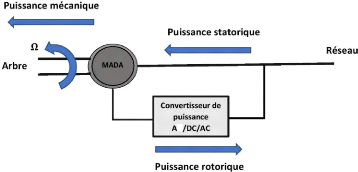
Figure III-2- Schéma de structure de la MADA en mode
moteur hypo-synchrone. [31]
III.3.2 Fonctionnement en moteur
hyper-synchrone
Le glissement devient négatif lorsqu'on augmente la
vitesse, la puissance est fournie par le réseau au stator et au rotor.
Pour réaliser ce mode on inverse l'ordre de phase de sorte que le champ
tournant induit par la fréquence du glissement soit en opposition de
phase avec celui du stator [29].
La figure III.3 représente le Schéma de structure
de la MADA en mode moteur hyper synchrone
47
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
Figure III-3.Schéma de structure de la MADA en mode
moteur hyper-synchrone [31]
III.3.3 Fonctionnement en mode génératrice
hyper-synchrone
Le fonctionnement en mode moteur hypo synchrone de la MADA
est représenté par la figure III.4. On s'aperçoit que la
puissance est transférée au réseau à travers le
stator et la puissance de glissement est récupérée
à travers le rotor pour être réinjectée au
réseau. On a donc un fonctionnement générateur au-dessus
de la vitesse de synchronisme. [31]
La machine asynchrone à cage classique peut avoir ce
mode de fonctionnement mais dans ce cas la puissance de glissement est
dissipée en pertes Joule dans le rotor [31]
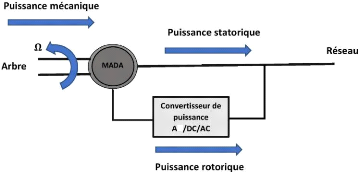
Figure III-4.Fonctionnement Génératrice
hyper-synchrone [31]
III.3.4 Fonctionnement en mode génératrice
hypo-synchrone
D'après la figure III.5 on remarque que le réseau
reçoit la puissance à travers le rotor, la
génératrice fonctionne donc en dessous de la vitesse de
synchronisme.
48
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
La figure III.5 montre que la puissance est fournie au
réseau par le stator. La machine asynchrone à cage classique ne
peut pas avoir ce mode de fonctionnement. [31]
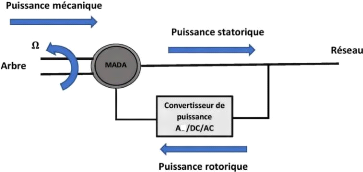
Figure III-5. Fonctionnement en mode génératrice
hypo-synchrone [31]
III.4 Modélisation de la MADA
Après avoir modélisé la partie
mécanique de l'aérogénérateur, nous allons
modéliser la machine asynchrone à double alimentation
l'élément phare de notre chaine de conversion pilotée par
le rotor liée à un convertisseur statique. Le modèle de la
MADA généralisé triphasé et biphasé de sera
présenté à travers cette section.
III.4.1 Modèle de la MADA dans le repère
triphasé-triphasé
La figure III.6 représente La représentation
électrique d'une machine triphasée asynchrone à double
alimentation dans le repère triphasé. Les trois enroulements
(bobinages) du stator sont représentés schématiquement sur
leurs axes magnétiques respectifs Sa, Sb et Sc qui
sont décalés
de 120°, ainsi que les trois enroulements du rotor sur
leurs axes magnétiques respectifs
Ra, Rb et
R?? [22].

Figure III-6. Représentation spatiale des enroulements de
la MADA [22]
49
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
Avec :
(Vsa, Vsb, Vsc), (Vra, Vrb, Vrc) :
Les tensions simple aux bornes des enroulement statoriques et rotoriques.
(Isa, Isb, Isc), (Ira, Irb, Irc) : Les
courants de phase instantanés statorique et rotorique.
8 : L'angle électrique entre le
repère statorique Sa et le repère rotorique
Ra.
III.4.1.1 Hypothèse simplificatrice
La modélisation de la MADA, est établie sous les
hypothèses simplificatrices suivantes :
· L'entrefer est d'épaisseur uniforme et l'effet
d'encochage est négligeable.
· La saturation du circuit magnétique,
l'hystérésis et les courants de Foucault sont
négligeables.
· Les résistances des enroulements ne varient pas
avec la température et on néglige l'effet de peau.
· On admet que la f.e.m. créée par chacune
des phases des deux armatures est à répartition sinusoïdale.
[22]
III.4.1.2 Equation électrique
En générales les équations de la machine
asynchrone à rotor bobiné dans un repère triphasé
s'écrivent :
· Au niveau du stator
d
Vsa = RsIsa + dt (Psa
d
Vsb = RsIsb + dt (Psb
d
Vsc = RsIsc + dt (Psc
|
(III.1)
|
|
· Au niveau du rotor :
|
d
Vra = RrIra + dt (Pra
d
Vrb = RrIrb + dt (Prb
d
Vsc = RrIrc + dt (Prc
|
(III.2)
|
50
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
Ø En format matriciel :
· Au niveau du stator
??????
( ?????? )
??????
|
=
|
????
( 0
0
|
0
????
0
|
0 ??????
0 ) ( ??????
???? ?????? )
|
??
+
|
??????
( ??????
??????
|
)
|
(III.3)
|
|
|
· Au niveau du rotor :
??????
??????
??????
|
=
|
????
0
0
|
0
????
0
|
0
0
????
|
??????
??????)
??????
|
?? ??????
|
(III.4)
|
|
|
Avec :
(??????, ?????? , ??????), (??????, ??????, ??????) : Les
flux statoriques et rotoriques.
????, ???? : les résistance statorique et
rotorique.
III.4.1.3 Equation Magnétique
Les expressions des flux en fonction des courants statoriques
et rotoriques sont données par
[32] :
??????
( ??????
??????
??????
( ??????
??????
|
)=
) =
|
????
( ????
????
????
( ????
????
|
????
????
????
????
????
????
|
????
???? ) ????
????
???? ) ????
|
??????
(?????? )
??????
??????
(?????? )
??????
|
+ (??????)
+ (??????)
|
??????
( ?????? )
??????
??????
( ?????? )
??????
|
(III.5)
(III.6)
|
|
Avec :
???? , ???? : Inductances propres statoriques et rotoriques ????
: Inductance mutuelle entre phases statoriques ???? : Inductance mutuelle entre
phases rotoriques
La matrice des inductances mutuelles entre les phases du stator
et du rotor dépend de la position angulaire è entre l'axe du
stator et celui du rotor [33]
51
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
(??????)
|
=
|
????
|
??????
??????
|
????????
(?? - (??
|
2??
|
)
)
|
??????
??????
|
(??
???????? (??
|
4??
|
)
)
|
??????
??????
|
(??
(??
????????
|
2??
|
)
)
|
(III.7)
|
|
|
|
|
|
|
|
???? : Maximum de l'inductance mutuelle entre une phase du
stator et la phase correspondante du rotor.
III.4.1.4 Equation mécanique
L'équation de la dynamique appliquée sur la
machine est donnée par :
??Ù (III.8)
??. = ??????- ????- (????. Ù??)
????
Avec :
??
Ù =
??
?????? = ??[????]([??????][????])
Avec :
?? : Le moment d'inertie du rotor en [????. ??2].
Ù : La vitesse angulaire mécanique en
[??????/??].
??????: Le couple électromagnétique en [??.
??].
????: Le couple résistant en [??. ??].
????: Le coefficient de frottement en [??. ??. ??/??????].
?? : La vitesse angulaire électrique de rotation du rotor
en [??????/??].
p : Le nombre de pair de pole.
III.4.2 Modèle de la MADA dans le repère
de Park
III.4.2.1 Définition de la transformation de
Park
|
(III.9) (III.10)
|
|
La transformation de Park est composé d'une
transformation triphasé - diphasé suivie d'une rotation. Elle
nous permet de transformer un système dans un repère abc vers un
repère ???? en
52
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
passant par le repère ???? . Le repère ???? est
toujours fixe par rapport au repère ?????? comme le montre la figure
III.7, par contre le repère ???? est mobile. Il forme avec le
repère fixe ???? un angle qui est appelé l'angle de la
transformation de Park ou angle de Park. [34]
Le choix des angles de transformation de Park pour les grandeurs
statoriques et celle des grandeurs rotoriques doivent coïncider pour
simplifier ces équations. Ceci se fait en liant les angles ???? et ????)
par la relation [34] : ?? ?? = ???? + ??
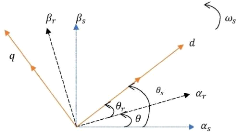
Figure III-7. Transformation de Park
On désire transformer les enroulements de la MADA
triphasée en des enroulements biphasés orthogonaux
équivalents selon les axes (????) lié au champ tournant ainsi la
composante homopolaire pour équilibrer le système
transformé, c'est à dire [32] :
· Direct selon l'axe (??).
· Quadrature (transversal) selon l'axe (??).
· Homopolaire (??).
Le produit matriciel définissant la transformation de PARK
s'exprime par :
[????????] = ??(??)[????????] (III.11)
Avec
:
|
????
|
|
????
|
|
[????????]
|
= [ ???? ] Et [????????]
|
=
|
[ ???? ]
|
|
????
|
|
????
|
??, ??, ?? : sont respectivement indice des composantes direct,
quadratique et homopolaire.
?? : représente l'angle de transformation, elle
dépend du choix du référentiel ainsi que des grandeurs
statoriques et rotoriques. La matrice de changement Park est exprimée
par l'équation II.12 :
53
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
[??(??)] = v3
2
[
|
2??
??????(??) ?????? (?? - 3 )
|
?????? (?? -34?? )
|
(III.12)
2??
4??
- ??????(??) - ?????? (?? - 3 ) - ?????? (?? - 3 )
1 1 1
v2 v2 v2
La transformation inverse de Park est donnée par :
[????????] = [??(??)]-1[????????] (III.13)
Avec :
|
[??(??)]-1 = v23
|
??????(??)
?????? (?? -
?????? (??+
|
|
- ??????(??)
|
1
|
(III.14)
|
|
v2
|
|
32??)- ??????
|
(?? - 32??)
|
1
v2
|
|
32??) -??????
|
(??+32??)
|
1
v2
|
Pour un système équilibré la composante
homopolaire est négligée, et en appliquant la transformation de
Park aux équations de la machine asynchrone dans le repère
naturel, on obtient les équations suivantes :
III.4.2.2 Equation électrique
Les équations des tension rotorique et statorique de la
MADA sont exprimée par :
|
??????
|
=
|
??????????
|
- ????? ??????
|
???????? +
|
|
|
????
|
|
|
|
???????????
|
????????
|
|
|
??????
|
=
|
??????????
|
+
|
+ ????
|
|
|
|
|
|
????????
|
(III.15)
|
|
??????
|
=
|
??????????
|
- ???????????
|
|
|
+ ????
|
|
|
|
|
????????
|
|
|
??????
|
=
|
??????????
|
{????
+ ???????????
|
|
|
+
|
Ø Les équations des courant son donnée par
:
{
???????? = ??(??).??????????
(III.16)
???????? = ?? (??).??????????
Dans ces équations, Rs, Rr,
Ls et Lr sont respectivement les résistances et
les inductances du stator et du rotor du MADA.
54
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
Vds, Vqs , Vdr , Vqr , Ids ,
Iqs , Idr, Iqr, öds , öqs ,
ödr et öqr représentent
respectivement les composantes selon les axes d et q des tensions statoriques
et rotoriques des courants et des flux.
III.4.2.3 Equation du flux magnétique
Les équations du flux magnétiques sont
donnée par :
??????
|
=
|
??????????
|
+ ????????
|
|
??????
|
=
|
??????????
|
+ ????????
|
|
??????
|
=
|
??????????
|
+ ????????
|
(III.17)
|
??????
|
=
|
??????????
|
+ ????????
|
|
|
III.4.2.4 Equation du couple
électromagnétique :
L'équations du couple électromagnétique de
la MADA son exprimées par :
??????
??????
Avec :
|
=
=
|
??.
??.
|
??
|
(????????????
(????????????
|
-
-
|
????????????)
????????????)
|
(III.18)
|
|
|
|
?? : nombre de pair de pole.
?????? : couple électromagnétique.
III.4.2.5 Equation des puissance active et
réactive statorique et rotorique
Les puissances actives et réactives statoriques et
rotoriques s'expriment par :
????
|
=
|
??????
|
??????+ ??????
|
??????
|
|
????
|
=
|
??????
|
?????? - ??????
|
??????
|
|
????
|
=
|
??????
|
?????? + ??????
|
??????
|
(III.19)
|
????
|
=
|
??????
|
?????? + ??????
|
??????
|
|
|
Avec :
???? : puissance actif statorique.
???? : puissance réactif statorique. ???? : puissance
actif rotorique. ???? : puissance réactif rotorique.
55
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
III.6.5. Choix du référentiel
(d-q)
Etant donné que dans les équations
précèdent de la MADA on a utilisé les paramètres
dans un repère (?? - ?? ) il existe trois choix de
référentiel possible. Par rapport au rotor, au stator et au champ
tournant.
III.4.2.6 Référentiel liée au champ
tournant
Dans ce référentiel, les axes (????) sont
immobiles par rapport au champ électromagnétique
créé par les enroulements statoriques, il est
caractérisé par ?? = ???? - ???? . Ce référentiel
est généralement utilisé dans le but de pouvoir appliquer
une commande de vitesse, de couple, etc. puisque les grandeurs dans ce
référentiel sont de forme continue. [31]
Dans notre travail, on utilise le référentiel
lié au champ tournant pour la modélisation et la commande de la
MADA. Alors, le modèle électrique général de la
machine asynchrone obtenue en utilisant la transformation de Park est
donné par les équations suivantes : [32]
Ø Équations électriques des
tensions statoriques rotoriques :
|
|
|
|
????????
|
|
|
??????
|
=
|
??????????
|
- ??????????
|
+ ????
|
|
|
|
|
|
????????
|
(III.20)
|
|
??????
|
=
|
??????????
|
+ ??????????
|
+ ????
|
|
|
|
|
|
|
|
????????
|
|
??????
|
=
|
??????????
-
|
(????
|
-
|
????
|
)?????? + ????
|
|
=
|
|
|
|
|
?? ??????
|
|
??????
|
|
??????????+
|
(????
|
-
|
????
|
)??????+ ????
|
|
??????
|
Les flux statoriques et rotoriques sont donnés par
:
= ?????????? + ????????
|
|
??????
|
=
|
??????????
|
+ ????????
|
|
|
??????
|
=
|
??????????
|
+ ????????
|
(III.21)
|
|
??????
|
=
|
??????????
|
+ ????????
|
|
III.4.2.7 Référentiel liée au
stator
Ce référentiel est souvent adapté pour
traiter les grandeurs instantanées. Car il est utile pour étudier
les régimes de démarrage et de freinage des machines
électriques.Il est aussi appelée système d'axe (??,
??).Son principal avantage est le non nécessité de transformation
vers le système réel.
56
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
???? = 0 ??????
???? = 0 ??????
???? = ????
Les équations des tensions statorique et rotoriques de
la MADA seront exprimées par :
|
????????
=
???????????????? + ????
????????
?????? = ?????????? + ????
?????? ????????
=
???????????????? - ???? ?????? + ????
?????? ????????
=
????????????????+ ???? ?? ???? + ????
III.4.2.8 Référentiel liée au
rotor
|
(III.22)
|
Dans ce référentiel, les axes (?? - ??) sont
immobiles par rapport au rotor tournant à une vitesse ?? l'utilisation
de ce référentiel permet d'étudier les régimes
transitoires où la vitesse est supposée constante notamment dans
les machines alternatives synchrones et asynchrones avec une connexion non
symétrique des circuits du rotor. [32]
??????
????
= ??
= 0 ??????
????
?????? ????????
?????? = ?????????? - ???? ?????? + ????
?????? ????????
=
???????????????? + ???? ?????? + ????
?????? = ?????????? + ????
?? ??????
?????? = ?????????? + ????
(III.23)
????????
III.5 Modélisation des convertisseurs
statiques
Notre chaîne de conversion d'énergie
étudiée pour l'alimentation de la MADA est composée d'un
convertisseur côté de la génératrice (redresseur
à diodes) et d'un convertisseur cotée réseaux (onduleur),
le convertisseur cotée Machine (CCM) et le convertisseur cotée
réseau (CCR) son connectée à travers un bus continue. Le
convertisseur cotée réseau (CCR) est connecté au
réseau à travers filtre résistive RL.La figure III-8
présente l'architecture de la chaine de conversion
étudiée.
57
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
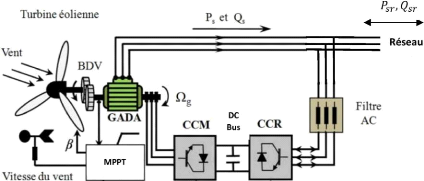
Figure III-8. Structure de la chaine de conversion
étudiée [30]
III.5.1 Modélisation du convertisseur coté
MADA
Un redresseur est un élément important dans le
domaine de l'électronique de puissance, ce convertisseur statique
transforme le courant alternative en courant continue. L'entrée du
redresseur est alimentée par une source de tension sinusoïdale
triphasée, et qui donne à la sortie une tension continue pour
alimenter l'onduleur à travers le bus continue.
La figure III.9 représente le redresseur que nous
allons modéliser il s'agit d'un redresseur a doublé alternance
non commandée (à base de diode).
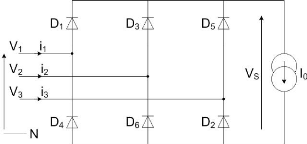
Figure III-9. Redresseur triphasée double alternance
· Les diodes : D1, D3 et D5 sont à cathode commune,
assurant l'allée du courant ??0.
· Les diodes : D4, D6 et D2 sont à anode commune,
assurant le retour du courant J0.
On suppose que la source triphasée d'alimentation est
équilibrée, d'amplitude de tensions et de fréquence
constantes. On néglige aussi les chutes de tension dues au
phénomène d'empiétement
58
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
et aux pertes dans les diodes. Le redresseur est alors
alimenté par le système triphasé qui a pour
équation : [22]
??1(??) = ??????????(????)
??2(??)
|
=
|
??????????
|
(????
|
-
|
??3(??)
|
=
|
{3
??????????
|
(????
|
-
|
|
(III.24)
3 2?? )
4??
)
· La tension de sortie du redresseur est donnée par
l'équation III.24:
???? (??) = ?????? [??1(??),??2(??),
??3(??) - ?????? ??1(??), ??2(??),
??3(??)] (III.25)
· Sa valeur moyenne :
3v3
????(??) = ??????
|
(III.26)
|
|
· Le facteur d'ondulation
???? ??????- ??????????
??% = 2????
(III.27)
III.5.2 Modélisation du bus continue
Le bus continu est un élément de stockage
d'énergie, la tension du bus continu est générée
à partir de l'intégration du courant capacitif.
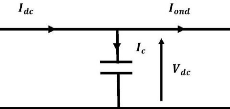
III-10. Modèle du bus continue
L'évolution de la tension du bus continu est
donnée par la formules suivantes :
??0+????
1 (III.28)
??????(??) = ???? ? 1 ?? ????(??)???? + ????(??0)
??0
59
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
Avec :
?? : La capacité du bus continu D'après
la loi des mailles on a :
(III.29)
'dc = '????d + 'c
'c = 'dc - '????d Donc :
????dc
(III.30)
'c = ?? ????
III.5.3 Modélisation du convertisseur
cotée réseau
L'onduleur de tension est un composant de
l'électronique de puissance qui converti une tension continue
d'entrée en une tension de sortie alternative, il est composé de
six interrupteurs bidirectionnels qui son constitué d'un transistor et
de diode de roue libre qui sert à protéger des thyristors.
(Figure III.11), les interrupteur (K1,K4);(K2,K5);(K3,K6) son
complémentaire c-à-d quand l'un est ouvert l'autre doit
être fermée afin d'éviter les courts-circuits delà
source. Afin d'éviter, il est aussi impérativement
nécessaire d'espacé le temps de fermeture de T21 ; T22 ou T23 et
le temps d'ouverture de T11, T12, T13 et vice versa.
Afin de modéliser l'onduleur de tension on peut
considérer le circuit comme étant l'association de trois
onduleurs monophasés en demi-point aussi la source continue
peut-être
décomposée en deux sources équivalentes de
tension (??????
2 ) avec un point milieu fictif « O
».Pour
simplifier l'étude, on supposera que :
· La commutation des interrupteurs est
instantanée,
· Les chutes de tension à leurs bornes sont
négligeables,
· La charge est triphasée équilibrée
et couplée en étoile avec point neutre isolé « n
».
60
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
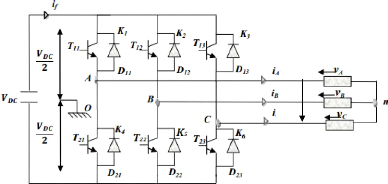
VCA
Figure III-11. Onduleur de tension triphasée
[22]
Le système triphasé obtenu à la sortie de
l'onduleur est équilibré en tension, ne contenant que les
harmoniques impairs différents de trois, les harmoniques de rang trois
et multiples de trois étant éliminés.
On peut exprimer les tensions composées par :
{
VAB = VAO - VBO (III.31)
VBC = VBO - VCO
VCA = VCO - VAO
· Au niveau de la charge, on peut déduire les
relations donnant les équations des tensions simples son donné
par l'équation III .32 :
{
VAB = VA - VB
(III.32)
VBC=VB - VC VCA=VC - VA
En effectuant les différences (VAB -
VCA), (VBC - VAB), (VCA -
VBC) membres à membres on trouve :
{
VAB - VCA = 2 VA - (VB + VC
(III.33)
VBC - VAB = 2 VB - (VA + VC) VCA -
VBC = 2 VC - (VA + VB)
On a un système équilibré donc on
déduit que :
61
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
(III.34)
{
??????- ?????? = 3 ???? ?????? - ??????= 3 ???? ?????? - ??????
= 3 ????
Donc :
1 (?????? - ??????) 3
???? =
???? =
|
1 (??????- ??????) 3
|
(III.34)
|
|
???? =
1 (?????? - ??????) 3
L'expression des tensions simples liant les tensions
mesurées entre les points A, B, C et le point milieu O est
définie par :
???? 1 2
???? = -1
???? 3 -1
-1
2
-1
|
-1
-1
2
|
?????? ]
??????
??????
|
(III.35)
|
|
L'état des interrupteurs, supposés parfaits peut
être définit par trois grandeurs booléennes de commande
????(i =A, B, C) :
· ????=1, alors les interrupteurs du haut sont
fermée (passant) et les interrupteurs du bas sont
ouvert(bloquée).
· ????=0, alors les interrupteurs du haut son ouvert
(bloquée) et les interrupteurs du bas son fermée (passant).
· Cela nous permet d'écrire l'équation
III.36 :
?????? ?????? ???? (III.36)
?????? = ????
?????? 2 ????
Donc :
???? ???? 2 -1 -1 (III.37)
] . 1
[ ???? ] = [ ???? ] . ?????? -1 2 -1
2 . [ 3
???? ???? -1 -1 2
III.5.4 Modélisation du filtre
Pour l'atténuation des harmoniques de courant un filtre
triphasé est utilisé reliant le convertisseur cote réseau
à ce dernier.
62
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
L'architecture du filtre est représentée à
travers la figure III.12.
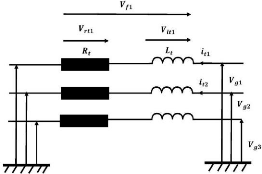
Figure III-12. Filtre coté réseau.
Les courants dans le filtre supposé sinusoïdal
équilibré sont donnés par :
??0+????
1
????1(??) = ? ??????1???? + ????1(??0)
????
??0
??0+????
????2(??) = 1 ? ??????2???? + ????2(??0)
???? ??0
????3(??) = -(????1 + ????2)
|
(III.38)
|
|
Les tensions aux du filtre s'écrivent :
{
????1 = ????1 - ????1 - ??????1
(III.39)
????2 = ????2 - ????2 - ??????2
Avec :
{
??????1 = ????????1 (III.40)
????2 =
????????2 De suite la définition des vecteurs ????, ???? et ???? :
???? =
(????1 (III.41)
) ????2

=
??
??1 )?? ??2

???? = (????1)
????2
??(??
(III.42)
(III.43)
63
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
III.5.5 Commandes à Modulation de Largeur
d'Impulsion (MLI)
Afin de déterminer les signaux délivrés
par l'onduleur il est impérativement nécessaire de
commandée les grandeurs ????, ????, et ???? par une commande
spécifique parmi ces commandes il existe une commande appelée
commandes à Modulation de Largeur d'Impulsion (MLI) [35].
Il existe plusieurs types de commande MLI chaque
méthode est différente de l'autre par apport à leurs
principes et leurs méthode employée parmi les principales
stratégie MLI on cite quelqu'une :
· La MLI Sinus-Triangle (à échantillonnage
naturel)
· Les MLI à échantillonnage
régulier
· La MLI vectorielle
· La MLI suboptimale
· La MLI précalculée ou calculée
Nous allons nous intéresser principalement dans ce
paragraphe est la MLI Sinus-Triangles. III.5.5.1 Modulation a largeur
d'Impulsion Sinus-Triangle
La commande MLI "Sinus-Triangle", dite à
échantillonnage naturel, est la plus simple des MLI(s), tant du point de
vue de son principe, que de son implantation (analogique ou numérique).
[35].Pour déterminer les instants de commutation, elle consiste à
comparer entre elles :
· Une onde de référence sinusoïdale,
la modulatrice, de fréquence ???? = ?? (fréquence de
référence)
· Une onde dite porteuse, en général
triangulaire, de haute fréquence ????, respectant
l'inégalité : ???? » ??
La commande MLI est caractérisée par les
paramètres suivants :
L'indice de modulation « m »
????
??= ????????
|
(III.44)
|
|
Avec :
???? : fréquence de modulation ???????? :
fréquence de référence
64
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
Le taux de modulation « r » est
exprimé par :
Avec :
Vref : l'amplitude de la tension de
référence. V, :la crête de l'onde de
modulation.
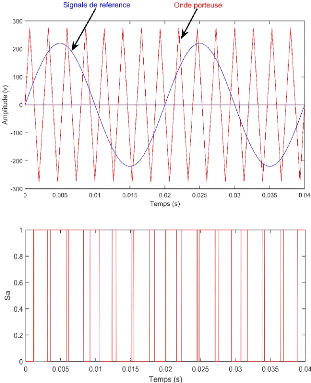
Figure III-13. Principe de fonctionnement de la technique MLI
triangulo sinusoïdal
III.6 Conclusion
Ce chapitre a permis d'écrire la modélisation
de la chaine de conversion de l'éolienne (turbine et MADA) tel que : la
turbine, le multiplicateur, l'arbre mécanique et la machine asynchrone
à double alimentation (MADA). D'autre part, l'éolienne
nécessite une stratégie de
65
Chapitre III : Modélisation de la MADA et des
convertisseurs statiques
commande afin de mieux gérer et contrôlé
l'énergie produite pour cela nous allons aborder la stratégie de
commande d'une éolienne dans le chapitre suivant.
66
Chapitre IV : Stratégie de
commande des puissances
active et réactive de la MADA
67
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
IV.1 Introduction
Afin de contrôlée les puissances produites par
la chaine de conversion présentée dans le chapitre
précèdent une stratégie de contrôle duis puissances
s'impose.
Dans cette optique, la stratégie de contrôle
proposé à travers ce chapitre est basée sur la commande
vectorielle par l'orientation du flux statorique, cette méthode de
contrôle permet d'obtenir des meilleures performances dans les
applications à vitesse variable en fonctionnement
générateur.
Dans un premier temps, nous allons présenter la
stratégie de commande global du système qui se compose de deux
parties de commande :
· Le contrôlé des convertisseur cotée
MADA.
· Le contrôle des convertisseurs cotée
réseau.
Ensuite, le contrôle des convertisseurs cotée
MADA qui est basé sur la loi de commande vectorielle par orientation du
flux qui permet d'effectuer un contrôle indépendant des puissances
active et réactive sera traitée à travers cette section de
chapitre.
Dans un second temps, le contrôle des convertisseurs
cotée réseau qui se compose d'un bus continu, d'un onduleur et
d'un filtre sera également décrit et détaillée.
La dernière partie de ce chapitre fera l'objet de
présentée les résultats de la commande appliquée a
l'ensemble de la chaine de conversion.
IV.2 Architecture du dispositif de commande
La figure IV.1 représente l'illustration du dispositif
de commande de la MADA traitée à travers ce chapitre.La variation
du vent générée est captée par la turbine cette
dernière convertie la puissance contenue dans le vent en puissance
électrique à travers la machine électrique, le stator de
la machine transmet la plus grande partie de la puissance électrique
produite directement au réseau.
Alors que le rotor, le convertisseur cotée machine
(CCM) et le convertisseur cotée réseau transmettent le reste de
la puissance soient une estimation de 30% de la puissance électrique.
· Convertisseur cotée MADA (CCM) :
ce dispositif va nous permettre de contrôler le couple
électromagnétique, la puissance active, et la puissance
réactive échangée entre le stator et le réseau.
68
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
· Convertisseur cotée réseau (CCR) :
le CCR est chargée du contrôle de la tension du bus
continu et les puissances active et réactive échangées
avec le réseau.
IV.3 Commande vectorielle
La commande vectorielle consiste à décomposer
le vecteur des courants statoriques ou rotoriques en deux
éléments, d'où le premier produit le flux, et le second
produit le couple au but de l'obtention d'un angle de 90° entre le flux
statique ou rotorique et le courant statorique de la machine [22].L'importance
de la commande vectorielle, aussi appelée commande à flux
orienté (Field Oriented control en anglais), est d'arriver à
commander la MADA de la même manière que d'une machine à
courant continu à excitation indépendante, autrement dit une
caractéristique approchant à celle de la machine à courant
continu à excitation séparée dans laquelle où il
y'a un découplage naturel entre la grandeur commandant le flux (le
courant d'excitation) et celle liée au couple (le courant d'induit).
[22]

Figure IV-1.Architecture du dispositif de commande
[30]
A travers la commande vectorielle les puissance active et
réactive vont être contrôlé indépendamment
l'une de l'autre.
69
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
La figure IV-2 montre l'égalité et
l'équivalence entre la formule du couple que l'on réalise avec la
commande découplée classique d'une machine à C.C et la
commande vectorielle d'une génératrice MADA.
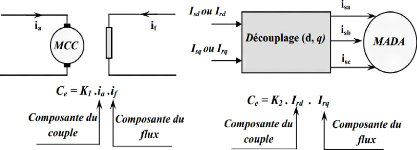
Figure IV-2. Principe de la commande vectorielle
[22]
Cette séparation approuvait de recevoir une vaste plage
de contrôle de vitesse, une réponse très rapide du couple
et une forte efficacité pour une haute plage de charge en régime
permanent.
IV.4 Commande du convertisseur coté
MADA
La figure IV.3 représente le schéma bloc de la
structure de commande du convertisseur cotée MADA décrite dans
cette section.
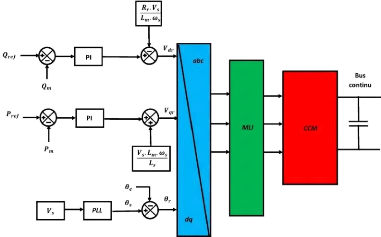
Figure IV-3. Structure de commande du convertisseur cotée
MADA
70
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
IV.4.1 Choix du référentiel pour le
modèle de la MADA
Trois types de référentiels existe :
· Référentiel fixé para port au stator
où ?? = ????.
· Référentiel fixé para port au rotor
où ?? = ????.
· Référentiel fixé para port au champs
tournant où ?? = 0.
Afin d'effectuée une régulation plus
aisée il faut avoir des grandeurs constantes dans le régime
permanant et pour cela on a choisi de fixer le repère ???? au champ
tournant.
IV.4.2 Détermination des angles pour les
transformations de Park
Pour déterminer les angles de transformation de Park
pour les grandeurs statoriques et rotorique une boucle à verrouillage de
phase (PLL), une méthode simple consiste à mesurer les tensions
statoriques, à les faire passer dans un repère diphasé et
en extraire la phase ???? que forme le vecteur tension avec l'axe de la
première phase du stator. Afin d'aligner le flux statorique avec l'axe
d, nous retranchons ??/2 à cet angle. Le rotor forme lui, un angle ????
avec la phase a du stator, l'angle ???? nécessaire aux transformations
des grandeurs rotoriques est donc donné par ????-????. Une mesure des
tensions statoriques et un capteur de vitesse sont indispensables pour
déduire ces angles de transformation. Cette méthode est fiable
elle permet d'obtenir une estimation robuste et de rejeter les petites
perturbations ou les harmoniques.
La figure IV-4 représente le schéma structurel
de la détermination des angles pour la transformation de Park.

Figure IV-4. Schéma structurel de la détermination
des angles pour la transformation de Park
71
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
IV.4.3 Modélisation de la MADA avec Orientation
du flux statorique
Avant d'entamé la commande vectorielle de la MADA par
orientation du flux statorique on rappelle les équations
différentielles de la machine :
?????? = ?????? = ?????? = ??????=
|
?????????? ?????????? ?????????? ??????????
|
+ + + +
|
????????
|
- ???? + ???? - ???? + ????
|
?????? ?????? ?????? ??????
|
(IV.1)
|
|
|
|
|
|
Les équations du flux son donné par :
??????
|
=
|
??????????
|
+ ??
|
??????
|
|
??????
|
=
|
??????????
|
+ ??
|
??????
|
|
??????
|
=
|
??????????
|
+ ??
|
??????
|
(IV.2)
|
??????
|
=
|
??????????
|
+ ??
|
??????
|
|
|
Avec :
????, ????, ????, ???? : Les résistances et les
inductances du stator et du rotor du MADA.
??????, ?????? ,?????? , ?????? : les composantes selon les axes
d et q des tensions statoriques et rotoriques selon les axes d et q
?????? , ?????? ,??????, ??????: Les composantes selon les axes
d et q des courants statoriques et rotoriques selon les axes d et q.
?????? , ?????? , ?????? , ?????? : Les composantes selon les
axes d et q des flux statoriques et rotoriques selon les axes d et q.
L'orientation de la tension et du flux statorique est
représentée à travers la figure. III.5.
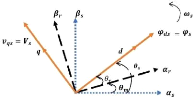
Figure IV-5. Référentiel diphasé ????
liée au champ tournant statorique.
72
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
Vu que notre choix du référentiel c'est
porté sur le référentiel lié au champ tournant et
le flux statorique est orienté sur l'axe ??, soit constamment nulle
?????? = 0, ?????? = ???? ,le modèle de la MADA deviens :
??????
|
????????
|
??????
??????
|
(IV.3)
|
|
|
|
|
En considérant l'hypothèse qui consiste
à négligé la résistance des enroulements
statoriques ????,les équations des tensions statorique et
rotorique de la MADA peuvent être exprimé par l'équation
IV.4 :
??????
|
=
=
|
????????????????
??????=
???? ??????
|
??????=
0
????= ??????????
????????
|
??????
??????
|
(IV.4)
|
|
|
|
Avec :
???? : la tension du reseau.
Les équations des flux seront exprimées par :
??????=
|
???? =
|
??????????+ ??
|
??????
|
(IV.5)
|
?????? =
|
??????????
|
+ ?? ?????? =
|
0
|
|
??????
|
=
|
??????????
|
+ ??
|
??????
|
??????
|
=
|
??????????
|
+ ??
|
??????
|
|
Avec :
M : inductance mutuelle.
De IV.5 on obtient relation entre les courants statoriques et
rotoriques :
73
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
???? ??
?????? =- ??????
???? ????
??
?????? = - ??????
????
|
(IV.6)
|
|
Les expressions des puissances active et réactive
statoriques dans cette hypothèse son donné par :
{
???? = ???????????? (IV.7)
???? =
????????????
Suivant les conditions de travail choisie dans notre
étude (?????? = 0) et, en remplaçant les expressions des courants
statoriques et des tensions c'est même expression deviennent :
??
????= -???? ???? ??????
????????
???? = ????
|
?????? (IV.8)
??????
????
|
|
L'équation du couple électromagnétique
devient alors :
(IV.9)
????
?????? = - ???? ??????
????
Avec :
?? : nombres de paires de pole.
En approximant ?????? a ??????? ? l'équation de la
puissance réactive deviens alors :
????2 ?????? (IV.10)
???? = - ??????
?????? ?? ????
On constate d'après l'équation que le
contrôle des puissances active et réactive au stator est
indépendant. Avec une inductance magnétisante constante et un
réseau électrique puissant, la puissance active sera directement
proportionnelle au courant rotorique d'axe ??, et la puissance
réactive proportionnelle au courant rotorique d'axe ?? a
une constante prée ????2 . [22]
?????? ??
L'expression des flux rotorique peut être exprimée,
en remplaçant les courants statoriques,
par :
74
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
?????? = (????
|
??2 ??????
)?????? +
???? ????????
|
|
??2 (IV.11)
?????? = (???? - )??????
????
Le remplacement des expressions obtenues (IV.11) dans les
équations des tensions rotoriques d'axes ?? - ?? donne :
?????? = ?????????? + (???? - ??2 ) ????????
???? - ?????? (???? - ??2 ) ??????
???? ????
(IV.12)
?????? = ?????????? + (???? - ??2 ) ????????
???? + ???????????? (???? - ??2 ) + ?????? (??
???? )
???? ???? ????????
Où :
????-??
.
?? : correspond au glissement de la machine ;?? =
????
D'après l'équation obtenue on remarque que pour
avoir des courants rotoriques de référence il faut imposer les
composantes diphasées des tensions rotoriques ?????? et ?????? a la
machine.
Après avoir établie les équations de la
MADA, la relation entre les puissances active et réactive, et les
tensions appliquées au rotor nous pouvons donc développer un
schéma bloc interne simplifié de la MADA figure IV.6 que nous
allons réguler par la suite.
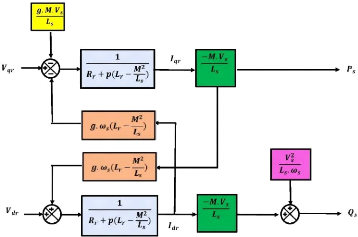
Figure IV-6. Schéma bloc du système à
réguler [21]
75
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
IV.5 Contrôle indépendant des puissances
active et réactive de la MADA
D'après la figure IV-6 réaliser à
travers les équations étudiées précédemment
on s'aperçoit que sur les deux axes qui lient les tensions rotoriques au
puissance actives statorique des fonctions de transfert du premier ordre son
apparu, cela va nous permettre d'élaborer une stratégie de
commande vectorielle facilement, vu que l'influence des couplages au niveau de
chaque axe peut être commandé indépendamment avec chacun
son propre régulateur.
La puissance active de référence sera
contrôlée par un régulateur au niveau de l'axe rotorique ??
tandis que la puissance réactive de référence sera
contrôlée par un régulateur au niveau de l'axe rotorique
??.
Afin d'optimiser la qualité de l'énergie
renvoyée sur le réseau la consigne de la puissance
réactive sera maintenue constante afin d'avoir un facteur de puissance
unitaire coté stator.
Le coefficient de puissance de l'éolienne va
être conservé de façons optimal grâce à La
consigne de puissance. Pour la commande en puissance du MADA deux
méthodes peuvent être élaboré :
· Méthode directe : elle contrôle
indépendamment les puissances actives et réactive en
négligeant les termes de couplage et à mettre en place un
régulateur indépendant sur chaque axe. Cette méthode sera
appelée méthode directe car les régulateurs de puissance
contrôlent directement les tensions rotoriques de la machine.
La figure IV.7 représente le schéma bloc de la
commande directe de puissance de la MADA
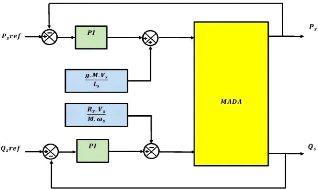
Figure IV.7- Schéma bloc de la commande directe de
puissance de la MADA. [36]
76
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
· Méthode indirecte : elle consiste à
récapituler l'opération de contrôle à partir de
l'inversement de la fonction de transfert du système à
réguler, pour établir les tensions rotoriques de
référence en fonction des puissances active et réactive au
niveau du stator. On recherche donc à former les équations des
puissances active et réactive d'une coté et des tensions
rotoriques d'autre part en fonction des courants rotoriques tout en tenant
compte du modèle mathématique de la génératrice.
Dans notre cas d'étude on s'intéresse seulement à la
méthode directe. La figure IV.8 représente le schéma bloc
de la commande indirecte de puissance de la MADA.

Figure IV-8. Schéma bloc de la commande indirecte de
puissance de la MADA [36]
IV.5.1 Régulation des puissance active et
réactive de la MADA
Afin de contrôler les puissance active et
réactive une régulation de puissance s'impose, à travers
cette section la régulation des puissances de la MADA va être
présenté.
Le principe de régulation ici est de commander
indépendamment et directement les puissances actives et réactive
de la MADA.
· Schéma bloc en boucle ouverte En
posant les f.e.m. ; ????, ???? suivantes :
77
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
??2
???? = -??????(???? - )??????
????
??2 ?????? (IV.13)
???? = ??????(????-??????+ ??
???? ????
L'équation des tensions rotorique deviens :
??2)????????
??????= ?????????? + (???? ???? + ????
????
??2)???????? (IV.14)
??????
?????????? + (????-???? + ????
????
Après avoir mis en place une transformation de la place
ont obtient :
??2
(???? + (???? - )??) ?????? = ?????? - ????
????
??2
???? + (???? - )??) ?????? = ?????? - ????
????
|
(IV.15)
|
|
Avec :
?????? =
1
2 (?????? - ????)
(???? + (????
??
???? ) ??)
(IV.16)
1
?????? = (?????? - ????)
(???? + (???? - ??2
???? ) ??)
En remplaçant IV.16 dans IV.15 nous obtenons alors les
expressions des puissance actives et réactives :
???? = -????
|
??
????
|
1
(?????? - ????)
????+ (???? - ??2
???? ) ??
|
(IV.17)
|
|
????= -????
|
??
????
|
1 ????????
(?????? - ????) +
????+ (????- ??2 ????
???? ) ??
|
|
Après avoir obtenue les équations nous pouvons
développer le schéma bloc contrôle des puissances
statoriques de la MADA représenté à travers la figure
IV.9.
78
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
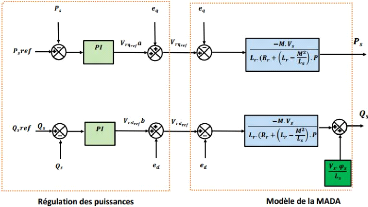
Figure IV-9. Contrôle des puissances statorique de la
MADA
IV.5.2 Régulation avec un correcteur PI classique
:
La figure IV-10 montre la régulation directe de puissance
avec un régulateur PI sur les deux axes d et q dont les fonctions de
transferts sont de la forme ?? ?? + ??? ??? .

Figure IV-10. Système régulé par un PI
classique. IV.5.2.1 Synthèses du régulateur PI classique
:
La fonction de Transfert en Boucle Ouverte (FTBO) avec les
régulateurs s'écrit de la manière suivante :
????????
|
=
|
(?? ??
|
????
|
??????
|
(IV.18)
|
|
|
|
????
|
|
|
|
On applique la méthode de compensation de pôles
pour la synthèse du régulateur éliminer le zéro
présent sur la fonction de transfert, nous choisissons :
79
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
Kp
|
|
LsRr
|
(IV.19)
|
Ki
|
=
|
M2
Ls (Lr - Ls)
|
|
|
Après l'application de la compensation des pôles,
on obtient :
FTBO =
|
MVs
KP M2
Ls (Lr - Ls)
|
(IV.20)
|
|
|
|
Ce qui nous donne FT en boucle fermée :
Avec :
MZ
1
Tr = Kp
Ls(LT-Ls )
MVs
Le terme ir désigne ici le temps
de réponse du système. Nous choisissons de fixer celui-ci
à 200 ms, ce qui représente une valeur suffisamment pour
l'utilisation faite sur l'éolienne où les variations de vent sont
peu rapides et les constantes de temps mécanique sont importantes. Une
valeur inférieure est susceptible d'engendrer des régimes
transitoires avec des dépassements importants et ne présente pas
d'intérêt particulier pour notre application [22]. Les termes
KKet Ki sont alors exprimés en fonction de
ce temps de réponse et des paramètres de la machine :
M2
Ls (Lr - Ls)
MVs
1
Tr
Kp =
(IV.22)
IV.6 Commande du convertisseur cotée
réseau (CCR)
Le schéma du CCR, du bus et du filtre R, L est
illustré dans la figure IV.11.
80
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
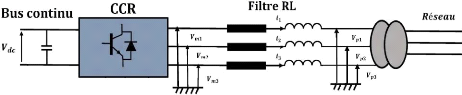
Figure IV.11-Schéma structurel du convertisseur
cotée réseau, du bus et du filtre RL.
Le CCR est connecté au réseau via un filtre RL,
le principal objectif du contrôle du convertisseur coté
réseau se résume à réguler la tension du bus
continu et à contrôler les puissances active et réactive
transitant à travers ce dernier. [12]
Lorsque le glissement ?? est positif (mode hypo synchrone) le
convertisseur CCR fonctionne en redresseur et en onduleur lorsque le glissement
est négatif (mode hyper-synchrone), il est donc bidirectionnel [37].afin
d'assurer le bon fonctionnement du système. Le convertisseur
côté réseau est commandé tel que la puissance active
et la puissance réactive côté réseau
s'écrivent comme suit :
{
?? = 3 2 (???????? + ????????) (IV.23) ?? = 32
(???????? - ????????)
En alignant le vecteur tension de référence sur
l'axe d :
{????= ???? ???? = 0
|
(IV.24)
|
|
Avec :
???? : Amplitude de la tension de phase du réseau.
L'équation IV.23 devient alors :
?? = 3 (IV.25)
2 ????????
{ ?? = - 3 2????????
81
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
La figure IV.12 représente le schéma global du
convertisseur cotée réseau.
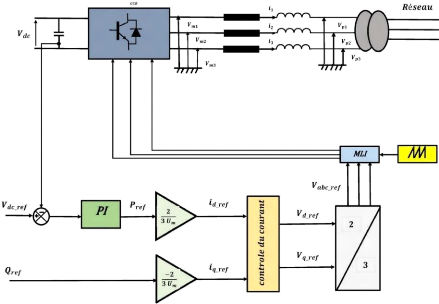
Figure. IV.12- Schéma global du contrôle du
convertisseur cotée réseau.
IV.6.1 Commande du bus continu
Le bus continue vas lier la partie coté MADA au
réseau en autorisant un transfert de de fréquences qui est
différents pour les deux sources. [12]
Le bus continue joue le rôle de liaison entre le
coté MADA et le coté réseau. La tension de
référence du bus continu Vdc_ref f est comparée
à celle mesurée aux bornes du condensateur équivalent
Vdc . Le correcteur proportionnel intégral (PI) permet
de maintenir une tension constante du bus continu en générant la
référence du courant à injecter dans le condensateur
ired , en autorisant un transfert de de fréquences qui est
différents pour les deux sources.
K??
Gc(??) = Kp +
P
|
(IV.26)
|
|
La relation entre la puissance active débitée
par le système éolien et celle reçue à la sortie du
pont en négligeant les pertes actives dans le convertisseur et dans les
inductances de couplage est donné par :
82
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
Pdc = Pg (IV.27)
Udcidc = 3v. i = 3v
|
1 Vl2
|
(IV.28)
|
|
Avec :
idc = C
|
dv dt
|
(IV.29)
|
|
La structure du système en boucle fermée est
illustrée à travers la figure IV.13.
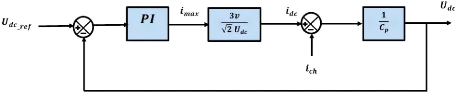
Figure IV.13- Modèle en boucle fermé de la boucle
de tension du bus continu. La FTBO est donnée par :
FTBO(P) = (Kp + p`)
|
3v
|
1
|
(IV.30)
|
|
|
|
|
Cp
|
|
|
La FTBF est donnée par :
FTBF(P)
FTBF(P) = 1 + FTBO(P)
1 + KpP
(IV.31)
FTBF(P) =
1
wn2P2 +
2e P + 1 wn
Donc :
Vdc
K??= 2?? 3V wn
IV.6.2 Commande des courants dans le filtre
:
Le filtre reliant le convertisseur CCR au réseau est
constitué d'une inductance « Lt » et
résistance « Rt », en appliquant les lois
de Kirchhoff ont obtient :
83
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
[??????] = ????[????] + ???? ??
???? [????] + [??????] (IV.33)
Avec : ?? = 1,2,3
Les équations des tensions statoriques dans le
repère diphasé ???? s'écrit :
??
?????? = ???????? + ???? ???? ???? - ???????????? + ??????
{ ?? (IV.34)
?????? = ???????? + ???? ???? ???? + ???????????? + ??????
Nous supposons que :
??
?????? = ?????????? + ???? ??????????

??
????????????????
??????????????
(IV.35)
=
+
A partir des deux équations précédentes, on
obtient :
?? ??????
?????? = -?????????? - ???? ???? + ??????
(IV.36)
????????
{?????? = -?????????? - ???? ???? + ??????
Avec :
??????, ??????: les tensions modulées par le
convertisseur dans le référentiel de Park. ?????? ,
?????? : les tensions du réseau dans le référentielle
de Park.
??????, ?????? : les composante directe et quadratique des
courants du filtre.
Et :
{
?????? = ?????????????? (IV.37)
?????? =
-?????????????? + ??????
84
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
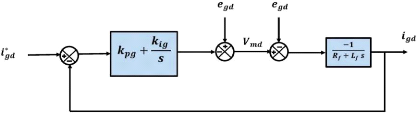
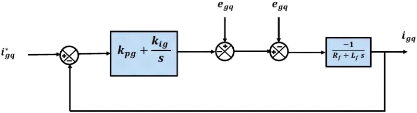
Figure IV.14- Contrôle des courants circulant dans le
filtre RL
Les courants de référence ?????? * et ?????? *
d'après la figure IV.14 sont respectivement issus du bloc de
contrôle de la tension du bus continu et du contrôle de la
puissance réactive au point de connexion du convertisseur cotée
réseau (CCR) avec le réseau électrique. En
négligeant les pertes dans la résistance ???? du filtre RL et
tenant compte de l'orientation du repère ???? lié au champ
tournant statorique (?????? = 0), l'équations III.19 devient :
{???? = ???????????? ???? = ????????????
|
(IV.38)
|
|
On déduit à partir de ces relations, qu'il est
possible d'imposer les puissances active et réactive de
référence, notées ici ????* et ????*, en imposant les
courants de référence suivants :
*
??????
*
??????
|
=
=
|
???? *
|
(IV.39)
|
|
|
|
La composante directe du courant ici pour contrôler la
puissance réactive au point de connexion du CCR avec le réseau
électrique, quant à la composante en quadrature est
utilisée pour réguler la tension du bus continu. Avec ce
principe, une puissance réactive de référence nulle peut
alors être imposée (???? * = 0 ??????).
85
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
IV.7 Résultats de simulation
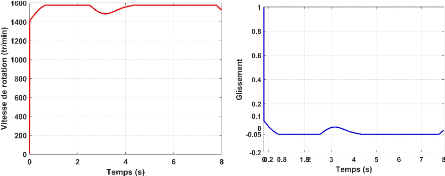
Figure IV.15. (b)-Glissement.
Figure IV.15.(a)-Vitesse de rotation.
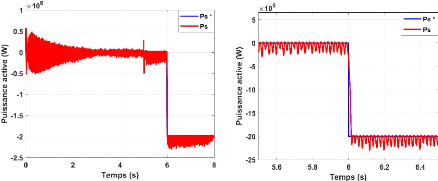
Figure IV.15. (c)-Puissance active statorique. Figure IV.15.
(d)-Puissance active statorique
zoomé.
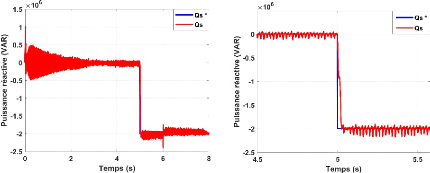
Figure IV.15. (e)-Puissance réactive Figure IV.15.
(f)-Puissance réactive statorique
statorique. zoomé.
86
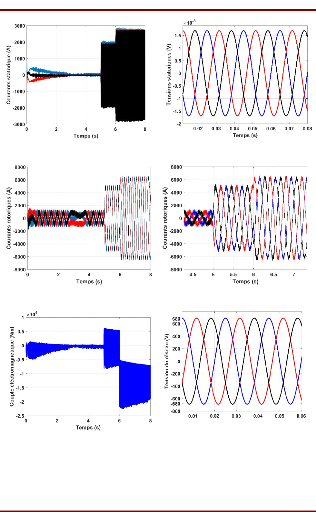
Chapitre IV : Stratégie de commande des puissances
actives et réactives de la MADA
Figure IV.15.(g)-Courants statorique. Figure IV.15. (h)-Tensions
statorique.
Figure IV.15. (i)-Courants rotoriques. Figure IV.15.
(j)-Courants rotoriques zoomé.
Figure IV.15. (l)-Tension du réseau.
Figure IV.15. (k)-Couple électromagnétique.
Figure IV.15. Résultats de la simulation de la commande
vectoriel.
87
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
· Interprétation des
résultats
La figure IV.15 illustre le résultat de simulation de
commande direct de puissance actif et réactive de la MADA associé
à un redresseur, un bus continu, un onduleur et un filtre, l'ensemble de
la chaine est relié au réseau.
Les diffèrent paramètre de la chaine de
conversion simulé sont donnée à travers l'annexe A, ainsi
que les modèle sous forme de schéma block implémenter dans
le logiciel MATLAB/Simulink/SympowerSystéme.
Afin d'examiner et de visualisé le comportement des
puissances actif et réactives durant la simulation avec cette commande
développer dans le section précédente ont impose une
puissance actif statorique de ?????????? = -2. 106 W à t =
6?? et une puissance réactive de ?????????? = -2. 106 VAR
à t = 5??.
On remarque d'après le résultat de simulation de
la figure IV.15. (c) et la figure IV.15. (e) que la valeur de puissance actif
et réactive statorique mesuré suivent bien leur valeur de
référence avec un faible taux de perturbation externe, ceci est
dut à la variation brusque de la vitesse, rapidement et sans
dépassement, causé par le bon découplage des deux axes de
commande d-q avec des faibles oscillations.
D'après la figure IV.15. (k) le couple
électromagnétique prend la même allure à vitesse
constant que la puissance actives car ces deux derniers sont proportionnels
l'une vers l'autre.
On remarque à travers les figure IV.15. (g) figure
IV.15. (i) les courant statorique est rotorique respectivement prennent en
régime permanant une forme sinusoïdale.
Suivant la figure IV.15. (b) qui illustre le glissement de la
MADA on s'aperçoit que la MADA fonctionne en mode hypo-synchrone de t=0
à t=0.2 car le glissement est non nul g > 0 et la vitesse de
synchronisme n ?? = 1500 t??/min est supérieure à la vitesse de
rotation n = 1475 t??/min .De t=0.8 à t=1.8 la MADA fonctionnent en mode
hyper-synchrone car le glissement prend une valeur négative à ce
moment-là , g < 0 et la vitesse de synchronisme n?? = 1500 t??/min
est inférieure à la vitesse de rotation n = 1575 t??/min.
IV.8 Conclusion
Dans ce chapitre nous avons décrit la synthèse
de la commande vectorielle a flux orientés qui permet d'assimilé
le comportement de la MADA a une MCC là où il y'a un
découplage naturel
88
Chapitre IV : Stratégie de commande des
puissances actives et réactives de la MADA
entre la grandeur qui commande le flux et celle liée au
couple, cela va nous permettre de mieux contrôler les puissance active et
réactive de la MADA à l'aide des correcteurs PI.
Les deux modes de commande vectorielle ; la commande
vectorielle directe en puissance de la MADA et indirecte à l'aide des
correcteurs PI ont également était traitée.
On a pu constater que la stratégie de commande directe
en puissance de la MADA est plus simple à mettre en oeuvre par rapport
à la commande indirecte.
Enfin de ce chapitre une simulation de la commande directe en
puissance a été simulée sous le logiciel MATLAB/Simulink
afin d'observer le comportement des puissance active et réactive et des
tensions et courants statorique envers cette commande. Les résultats
obtenus ont montré la fiabilité de la commande qui a donné
un bon suivie des puissance active et réactive statorique envers leurs
signaux de références.
89
Conclusion générale
Conclusion générale
Le but de l'étude effectuée à travers ce
mémoire est la proposition et la mise en oeuvre d'une stratégie
de contrôle de l'énergie réactive d'un parc éolien
qui est constituée d'éoliens à vitesse variables
basée sur la machine asynchrone a double alimentation (MADA).la
stratégie de commande de puissance réactive de la chaine de
production de l'éolienne a été effectuée sous le
logicielle Matlab\Simulink\SimPowerSystem.
Dans le premier chapitre un état de l'art et une
présentation de l'énergie éolienne dans son état
général, et les origines de l'énergie éolienne, ces
principaux composant ainsi que les différents types d'éolienne
qui existe dans le monde, on était traitée.
En deuxième temps, ce chapitre a fait l'objet
d'abordé quelque notion de conversion de l'énergie
cinétique, les diffèrent structure d'alimentation possible de la
machine asynchrone a double alimentation configurations, et à la fin de
ce chapitre les avantages et les inconvénients de l'énergie
éoliennes ont également était présentés.
Ensuite dans le deuxième chapitre, nous avons tout
d'abord procédé à la modélisation de la turbine
éolienne a vitesse variable basée sur une machine asynchrone a
double alimentation (MADA), de la modélisation du vent jusqu'au
multiplicateur. Dans la deuxième partie du chapitre les
différents modes de régulation de vitesse de rotations de
l'éolienne, et les zones de fonctionnement d'une turbine
éoliennes a vitesse variable ont également été
énoncée. Après cela nous avons présentée
l'algorithme de maximisation de puissance MPPT (Maximum Power Point Tracking),
utilisé dans le système éolien étudié,
à l'aide d'un asservissement de vitesse contrôlé par un
régulateur de type PI (proportionnel intégral), dont les
paramètres sont calculés par la méthode analytique. En
fin, la simulation et la présentation des résultats obtenue d'un
asservissement avec contrôle de la vitesse on était mis en
oeuvre.
Le chapitre trois nous a permis de d'écrire le
générateur choisi dans cette étude et d'effectuée
sa modélisation dans différents repères. D'autre part, les
convertisseur statique qui sont mis en oeuvre dans la chaine de conversion ont
également était présentée et modelisée.La
stratégie de commande MLI (Modulation de Largeur d'Impulsion) a
également était présentée à travers ce
chapitre.
Dans le dernier chapitre de ce mémoire la
synthèse de la commande vectorielle a flux orientés qui permet
d'assimilé le comportement de la MADA a une MCC là où il
y'a un découplage naturel entre la grandeur qui commande le flux et
celle liée au couple a était étudiée.
90
Conclusion générale
Les deux modes de commande vectorielle ; la commande
vectorielle directe en puissance de la MADA et indirecte à l'aide des
correcteurs PI ont également était traitée.
Enfin de ce chapitre une simulation de la commande directe en
puissance a été simulée sous le logiciel
MATLAB/Simulink\SimpowerSystem afin de contrôler les puissance active et
réactive. Les résultats obtenus nous ont permis d'atteindre
l'objectif de cette étude qui est le contrôle de l'énergie
de la chaine de production éoliennes.
91
Bibliographie
Bibliographie
[1] F. POITIER, «Etude et commande de
génératrices asynchrones pour l'utilisation de l'énergie
éolienne-machine asynchrone a cage autonome-machine asynchrone a double
alimentation reliée au réseau» universitée de nante,
nante, 2003.
[2] A. CHEMIDI, «Analyse, modélisation et commande
avancée d'une éolienne utilisée dans une ferme»
Tlemcen-Algerie, 2015.
[3] M. STIEBLER, Wind energy systems for electric power
generation, Einsteinufer 11, D10587 Berlin: Springer-Verlag Berlin Heidelberg,
2008.
[4] E. Hau, Wind Turbines , Fundamentals,technologies
,Applications Economics ,2nd Edition, Germany: Springer, 2005.
[5] F. Z. Joyce Lee, «GWEC | GLOBAL WIND REPORT 2021,»
Rue Belliard 51-53 Brussels, Belgium, 2021.
[6] I. YAHYAOUI, Advances in Renewable Energies and Power
Technologies Volume 1: Solar and Wind Energies, Amsterdam, Netherlands:
Elsevier Inc., 2018.
[7] M. K. L. L. T. O. ,. M. M. Nadjah, « Etude de
l'hélice d'une éolienne de 5 kW» chez Revue des Energies
Renouvelables , Oum El Bouaghi,Algerie, 2008, pp. 257-264.
[8] J. T. M. S.M MUYEEN, Green Energy and Technology Stability
Augmentation of a Grid-connected wind farm, japan: Springer-Verlag London
Limited, 2009.
[9] «NORME BBC» [En ligne]. Available:
http://www.norme-bbc.fr/eolienne/.
[Accès le 05/06/2021 juin 2021].
[10] «eolupjv.wordpress,» wordpress, [En ligne].
Available:
https://eolupjv.wordpress.com/les-types-deoliennes/.
[Accès le 01 avril 2021].
[11] M. J. Wagner H-J, Introduction to wind energy systems,
Berlin, Heidelberg, 2013.
[12] T. Ghennam, Supervision d'une ferme éolienne
pour son intégration dans la gestion d'un réseau
électrique, Apports des convertisseurs multi niveaux au réglage
des éoliennes à base de machine asynchrone à double
alimentation, Lille ,France: Ecole Doctorale SPI 072 (Lille I, Lille III,
Artois, ULCO, UVHC, EC Lille), 2011.
[13] A. Zaimi, Optimisation de la commande d'une
éolienne à base de machine synchrone à aimants
permanents,these pour l'obtension d'ingenieur CNAM, Maroc, 2014.
[14] J. L. A. R. M. I. Gonzalo Abad, DOUBLY FED INDUCTION
MACHINE MODELING AND CONTROL FOR WIND ENERGY GENERATION, IEEE PRESS,WILEY,
2011.
[15] «energie plus le site,» 12 mai 2010. [En ligne].
Available:
https://energieplus-lesite.be/theories/eolien8/rendement-des-eoliennes/.
[Accès le 25 avril 2021].
92
Bibliographie
[16] M. T. Yacine RAHAB, "Etude de l'association d'une
génératrice asynchrone à double alimentation (GADA) et
d'un convertisseur multiniveaux " Mémoire pour l'obtention de diplome de
Master en Elechtrotechnique, Tizi-Ouzou,Algerie:UNIVERSITE MOULOUD MAMMERI
DE TIZI-OUZOU, 2014.
[17] M. L. Abdelkader, Conception de la commande d'une
machine asynchrone « Application de la commande par mode de glissement
à une éolienne basée sur la Machine Asynchrone a Double
Alimentation » Mmeoir en vue de l'obtention de Magister en
Electrotechnique., Oran,Algerie: Université des Sciences et de la
Technologie d'Oran Mohamed Boudiaf, 2018.
[18] L. MOURAD, Synthèse de lois de commande
non-linéaires pour le contrôle d'une machine asynchrone à
double alimentation dédiée à un système
aérogénérateur Présentée pour l'obtention du
grade de DOCTORAT 3ème Cycle En : Génie Electrique,
Tlemcen,Algerie: Université Aboubakr Belkaïd - Tlemcen -
Faculté de TECHNOLOGIE, 2016.
[19] H.-J. W. J. Mathur, Introduction to Wind Energy Systems.
[20] B. S. e. C. Youssouf, Commande des puissances actives
et réactive d'une éolienne basée sur une generatrice
asynchrone a double alimentation memoire pour l'obtention de diplome de
master, Tlemen: univeristée de tlemcen, 2019.
[21] S. Fawzi, La Machine Asynchrone à Double
Alimentation :Stratégies de Commande et Applications,These our
l'obtention du diplôme de DOCTORAT EN SCIENCES EN ELECTROTECHNIQUE,
CONSTANTINE: UNIVERSITE DES FRERES MENTOURI DE CONSTANTINE 1, 2018.
[22] C. Naim, Etude d'une Chaine de Conversion de l'Energie
Eolienne these pour lobtention de doctorat, constantine: Université
des Frères Mentouri de Constantine, 2018.
[23] Heier, «"Grid Integration of Wind Energy Conversion
Systems",,» chez John Wiley & Sons, 1998.
[24] K. N., « Commande multi modèle optimale des
éoliennes : Application à la participation des éoliennes
au réglage de la fréquence» 2011.
[25] Aimani. S, «Modélisation de Différentes
Technologies d'Eoliennes Intégrées dans un Réseau de
Moyenne Tension,» Lille, 2005.
[26] L. MOURAD, Synthèse de lois de commande
non-linéaires pour le contrôle d'une machine asynchrone à
double alimentation dédiée à un système
aérogénérateur these presentée pour l'obtention de
grade de DOCTORAT 3ème Cycle, Tlemcen,Algerie.: Université
Aboubakr Belkaïd - Tlemcen -, 2016.
[27] G. A., « Système éolien basé
sur une MADA : contribution à l'étude de la qualité de
l'énergie électrique et de la continuité de service»
Nancy-France, 2010.
93
Bibliographie
[28] K. Bahia, Etude et commande d'une turbine
éolienne utilisant une Machine Asynchrone à Double Alimentation
mémoire en vue d'obtention de Magister en API,
Tlemcen,Algérie: Université de TLEMCEN, 2011.
[29] A. Tamaarat, «Modelisation et commande d'un
systém de conversion d'energie eolienne à base d"une Mada,»
Buskra-Algerie.
[30] Y. Djeriri, H. M. Ahmed et Z. Boudjema, «Commande
à structure variable de la machine asynchrone à double
alimentation destinée à la production d'énergie
éolienne,» chez 2nd International Symposium on Mechatronics
& Renewable Energy ISMRE, Algerie, 2018.
[31] B. Youcef, etude et commande du moteur asynchrone
à double alimenetation (MADA) par differentes techniques avancées
these pour l'obtention du diplome de magistere, el Oued: centre
universitaires d'el Oued, 2010.
[32] S. A. Rekiouk, commande des puissance active et
reactive d'une eolienne basée sur une MADA these pour l'obtention de
diplome de Master, tlemcen: universitée de tlemcen, 2017.
[33] M. Bouharkat, Etude de l'évolution des courants
rotoriques d'une machine asynchrone à cage en régime dynamique ,
Thèse présentée pour l'obtention du diplôme de
doctorat, Batna: 'université de Batna,, 2006.
[34] B. Lotfi, note de cours ,modelisation et commande de la
machine asynchrone
[
http://baghli.com/dl/courscmde/cours_cmde_MAS.pdf],
tlemcen: universitée de tlemcen, 2020.
[35] A. Mechernene, «Modélisation de l'onduleur de
tension à deux niveaux commandé par MLI-ST et MLI-SVM,» chez
Complément théorique 3, Tlemcen, 2020.
[36] B. D. M. A. ,. Y. D. Mohamed Allam, «Etude comparative
entre la commande vectorielle directe et indirecte de la Machine Asynchrone
à Double Alimentation (MADA) dédiée à une
application éolienne,» Journal of Advanced Research in Science
and Technology-ISSN: 2352-9989, 2014.
[37] G. A. Karim, Etude et commande d'une chaine de
conversion éolienne moyenne puissance raccordée au réseau
moyenne tension these pour l'obtention de Doctorat en sciences,
Biskra,Algerie: Université Mohamed Khider - Biskra, 2017.
94
Annexe A
Annexe A
A-1-Paramètre de la turbine éolienne
Les paramètres de la turbine éolienne de 2.5 Mw
utilisée dans cet étude sont les suivants :
|
Nom
|
Valeurs
|
Unité
|
|
Puissance mécanique
|
2,5.106
|
??
|
|
Densité de l'aire
|
1.225
|
Kg/??3
|
|
Angle de calage
|
0
|
O
|
|
Nombre de pale
|
3
|
/
|
|
Rayon de pale
|
42
|
m
|
|
Gain du multiplicateur
|
100
|
/
|
|
Coefficient de friction
|
0.02
|
/
|
|
Moment d'inertie
|
127
|
Kg. ??2
|
|
Vitesse spécifique optimal
|
0.48
|
/
|
|
Coefficient de puissance
|
8.1
|
/
|
|
??
|
0.7
|
/
|
A-2-Paramètres de la MADA
Les paramètres de la MADA utilisée dans ce
mémoire sont donner dans le tableau suivant :
|
Nom
|
Valeurs
|
Unité
|
|
Fréquence du réseau
|
50
|
Hz
|
|
Puissance nominale du stator
|
2.106
|
W
|
|
Vitesse de synchronisme
|
1500
|
tr/min
|
|
Puissance active statorique
|
2.10-6
|
W
|
|
Coefficient de friction
|
127
|
/
|
|
Courant nominal statorique
|
1760
|
A
|
|
Tension du réseau
|
690
|
V
|
|
Nombre de pair de pole
|
2
|
|
|
Couple électromagnétique
|
12732
|
N/m
|
|
Tension nominale du rotor
|
2070
|
V
|
|
Resistance rotorique
|
2,9.10-3
|
Ohm
|
|
Résistance statorique
|
2,6.10-3
|
Ohm
|
|
Inductance mutuel
|
2,5.10-3
|
Henry
|
A-3-Paramètres de la liaison au réseau
|
Nom
|
Valeur
|
Unité
|
|
Pulsation du réseau
|
2??. 50
|
Rd
|
|
Tension bus continu
|
1150
|
V
|
|
Capacitée du bus continu
|
2,5.10-3
|
F
|
|
Résistance de filtre
|
20.10-6
|
Ohm
|
|
Inductance de filtre
|
400.10-6
|
Henry
|
95
Annexe B
Annexe B
B-1-Paramètre du régulateur MPPT avec
asservissement de vitesse de la turbine éolienne
|
Nom
|
Valeur
|
Unité
|
|
????
|
-500000
|
/
|
|
????
|
-2
|
/
|
B-2-Paramètre du régulateur Proportionnel
Intégral de la MADA/CCM/CCR
|
Nom
|
Valeur
|
Unité
|
|
????
|
-0.2164
|
/
|
|
????
|
-184.3142
|
/
|
|
?????? ????
|
-40000
|
/
|
|
??????????
|
-30000000
|
/
|
|
??????????
|
0.3016
|
/
|
|
??????????
|
56.8489
|
/
|
B-3-Modèle Simulink de la turbine éolienne
avec asservissement de vitesse implémentée dans l'environnement
MATLAB :
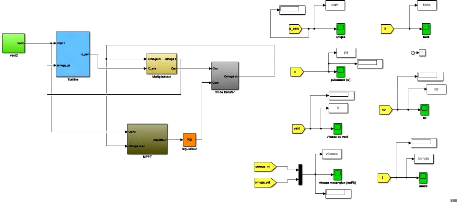
Figure B-3-Modèle Simulink de la turbine éolienne
avec asservissement de vitesse implémentée
dans
l'environnement MATLAB.
96
Annexe B
B-4-Modèle Simulink de la turbine éolienne
sans asservissement de vitesse implémentée dans l'environnement
MATLAB :
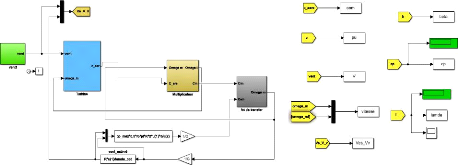
Figure B-4-Modèle Simulink de la turbine éolienne
sans asservissement de vitesse implémentée
dans
l'environnement MATLAB.
B-5-Modèle Simulink de la turbine éolienne
connectée au réseau avec commande vectoriel
implémentée dans l'environnement MATLAB :
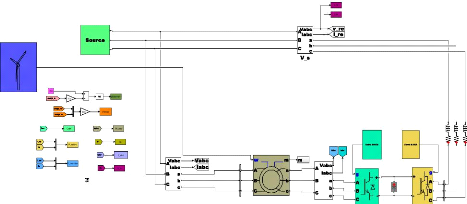
Figure B-5-Modèle Simulink de la turbine éolienne
connectée au réseau avec la commande
vectorielle
implémentée dans l'environnement MATLAB.
97
Annexe B
Le block de contrôle du convertisseur cotée MADA
(CCM) implémentée sous le logiciel MATLAB est
représentée à travers la figure B-5-(a) :
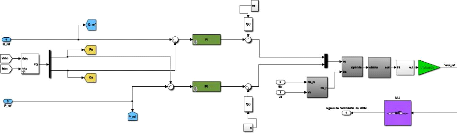
Figure B-5-(a)-Modèle Simulink du bloc de contrôle
du convertisseur cotée MADA (CCM)
implémentée dans
l'environnement MATLAB.
Le bloc de contrôle du convertisseur cotée
réseau (CCR) implémentée sous le logiciel MATLAB est
représentée à travers la figure B-5-(b) :
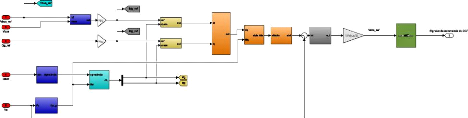
Figure B-5-(b)-Modèle Simulink du bloc de contrôle
du convertisseur cotée réseau (CCR)
implémentée
dans l'environnement MATLAB.
98
Résumé
Résumé
L'objet de ce projet est de mètres en oeuvre une
stratégie de commande de puissance actif et réactive dans un parc
éolien. Nous avons présenté l'états de l'art des
éoliennes, puis nous avons étudier la partie mécanique
intégrant la turbine, le multiplicateur, et ces deux types de control
MPPT afin de définir la meilleure stratégie control de
l'aérogénérateur, ensuite on s'intéressé
à la partie électrique (la génératrice)
associée à deux convertisseur cotée machine et
cotée réseau. Enfin nous avons présenté la
stratégie de commande du modèle complet du système
éolien qui est basé sur une commande vectorielle par orientation
du flux, les résultats des simulations montre que
l'objectif assigné a bien été
atteint.
Mots-clés : Park éolien, Puissance
réactive, MPPT, Machine asynchrone à double alimentation,
commande vectorielle.
Abstract :
The purpose of this project is to implement an active and
reactive power control strategy in a wind farm. We presented the state of the
art and the current situation, then we studied the mechanical part integrating
the turbine, the gearbox, the MPPT technique in order to define the best
control of the wind turbine, then we are interested in the electrical part
Doubly Fed Induction Machine (DFIM) associated with two Back-to-Back converters
from where the mathematical models of the DC bus and the filter were presented.
Finally, we presented the control strategy of the complete model based on a
vector control by orientation of the flux and the results of the
simulations show that the assigned objectivehas been
achieved.
Key words:Wind generator - Doubly Fed Induction
Machine - Réactive energy power,FOC.
ÕÎáãáÇ
:
äáÇ
|
ÉáÇÍ
ÇäãÏÞ
|
. ÍÇíÑáÇ
|
ÉÚÑÒã
|
í
ÉáÚÇÊãáÇæ
ÉØÔäáÇ
ÉÞÇØáÇ
|
í
|
ãßÍÊáÇ
|
ÉíÌíÊÇÑÊÓÇ
ÐíäÊ
|
æå
ÚæÑÔãáÇ ÇÐå
|
äã ÖÑÛáÇ
|
|
í ãßÍÊ
|
áÖ ÏíÏÍÊ
|
áÌ
|
äã MPPT
ÉíäÞÊæ
懂
ÉÈáÚæ
äíÈÑæÊáÇ
|
ÌãÏí
|
íÐáÇ
|
íßíäÇßíãáÇ
ÁÒÌáÇ
|
ÇäÓÑÏ
|
ãË íáÇÍáÇ
ÚÖæáÇæ
|
|
|
ÇðÑíÎ
|
. ÍÔÑãáÇæ
|
ÑãÊÓãáÇ
|
ÑÇíÊáÇ
áÞÇäá
ÉíÖÇíÑáÇ
|
ÌÐÇãäáÇ
ãíÏÞÊ ãÊ
|
ËíÍ
|
) Ïáæã(
|
íÆÇÈÑåßáÇ
ÁÒÌáÇÈ
|
ÇäããÊå Ç
|
ãË
ÉíÍíÑáÇ
ÊÇäíÈ ÑæÊáÇ
|
. ÞÞÍÊ ÏÞ
ÏÏÍãáÇ ÏåáÇ
ä ÉÇßÇÍãáÇ
ÌÆÇÊä ÊÑåÙæ
áãÇßáÇ
ÌÐæãäáá
ãßÍÊáÇ
ÉíÌíÊÇÑÊÓÇ
ÇäãÏÞ
.ÉíáÚÇÊáÇ
ÉÞÇØáÇ -
ÉäãÇÒÊãáÇ
ÑíÛ
ÉÌæÏÒãáÇ
ÉíÐÛÊáÇ Éá -
ÍÇíÑáÇ Ïáæã
:ÉíÍÇÊãáÇ
ÊÇãáßáÇ
99
| 

