|
République Algérienne Démocratique
et Populaire
Ministère de l'Enseignement Supérieur et de la
Recherche Scientifique
Université des Sciences et de la Technologie
Houari Boumediene

Faculté de Mathématiques
Département de Recherche Opérationnelle
Mémoire
En vue de l'obtention du Diplôme de MASTER
Recherche
Opérationnelle, Management, Risque et Négociation
(ROMARIN)
Thème
Optimisation des délais dans un
système
de planification et de gestion de
la
performance
Présenté par: NEFRAOUI Aimen Encadré par:
MOULAÏ Mustapha
CHEBBAB Abdesslem CHAIBLAINE Yacine
Soutenu le 18 juillet 2021, devant le jury composé
de :
Présidente : AMROUCHE Salima, USTHB Rapporteur:
MOULAÏ Mustapha, USTHB Examinatrice : MAACHOU Nacera, USTHB
Code Mémoire: 10/ROMARIN/2021
Remerciements
Nous remercions chaleureusement l'ensemble des enseignants
du
département de mathématiques de l'USTHB,
particulièrement, notre
encadreur monsieur le professeur MOULAÏ
Mustapha de nous avoir
encadré, encouragé et surtout de ses
conseils judicieux, sa
disponibilité et ses apports avantageux sur ce
mémoire.
Nos remerciements vont aussi à monsieur CHAIBLAINE
Yacine
pour ses efforts, son assistance, le partage de son savoir et le
temps
qu'il nous a accordé.
Nous remercions également tout le personnel de la
direction SPE -
SONATRACH et en particulier Mme LASKRI Karima qui n'a
cessé
de nous orienter et nous encourager, pour son aide et son
assistance
durant toute la période pour l'élaboration de notre
mémoire de fin
d'études.
Et enfin, toute personne qui, d'une façon ou d'une
autre, a contribué
à la réalisation de ce
mémoire, trouve ici le témoignage de nos plus
vives
gratitudes.
Dédicace
Je tiens à dédier ce mémoire:
À mon cher Père et ma chère Mère,
en témoignage et en gratitude de
leurs dévouement, de leur
soutien permanent durant toutes mes
années d'études, leurs
sacrifices illimités, leurs réconfort moral, eux
qui ont
consenti tant d'effort pour mon éducation, mon instruction
et pour me
voir atteindre ce but, pour tout cela et pour ce qui ne
peut être dit,
mes affections sans limite.
À ma chère soeur et cher frère pour leurs
encouragements
permanents, et leur soutien moral.
À mon cher binôme NEFRAOUI Aimen et à toute
sa famille.
À toute ma famille et mes amis pour leur soutien tout au
long de
mon parcours universitaire et à tous ceux qui m'ont
enseigné tout au
long de ma vie scolaire.
À vous tous un grand merci.
Abdesslem
Dédicace
C'est avec profonde gratitude et sincères mots, que je
dédie ce
travail de fin d'études:
À ma chère mère, la lumière de mes
jours, qui a oeuvré pour ma
réussite, par son amour, son
soutien, tous les sacrifices consentis et
ses précieux conseils,
reçois à travers ce travail aussi modeste
soit-il,
l'expression de mes sentiments et de mon éternelle
gratitude, que
Dieu te garde et te protège.
À mon cher père, l'épaule solide, qui m'a
toujours soutenu et aidé à affronter les difficultés, qui
a veillé tout au long de ma vie à ce que je n'eusse besoin de
rien, celui qui s'est toujours sacrifié pour me voir réussir. Je
prie dieu le tout puissant pour qu'il te protège et te donne
bonheur et prospérité.
À ma chère soeur et cher frère pour leurs
encouragements
permanents, et leur soutien moral, je vous souhaite un
avenir
radieux plein de réussite et que Dieu, le tout puissant, vous
protège
et vous garde.
À mon cher binôme CHEBBAB Abdesslem et à
toute sa famille.
À toute ma famille et mes amis pour leur soutien tout au
long de
mon parcours scolaire.
Aimen
Table des matières
|
Introduction générale
1 Présentation de l'organisme
d'accueil
|
1
3
|
|
1.1
|
Introduction
|
3
|
|
1.2
|
Historique de la SONATRACH
|
3
|
|
1.3
|
Organisation de l'entreprise
|
4
|
|
|
1.3.1 La Direction générale
|
4
|
|
|
1.3.2 Structures fonctionnelles
|
5
|
|
|
1.3.3 Activités de SONATRACH
|
5
|
|
1.4
|
Missions de SONATRACH
|
8
|
|
1.5
|
Présentation de la Direction d'accueil : La Direction
SPE
|
8
|
|
|
1.5.1 Organisation de la Direction SPE
|
8
|
|
|
1.5.2 Missions de la Direction SPE
|
9
|
|
1.6
|
Conclusion
|
9
|
|
2
|
Généralités sur la planification,
l'ordonnancement et la performance
|
10
|
|
2.1
|
Introduction
|
10
|
|
2.2
|
La planification
|
10
|
|
|
2.2.1 Définition
|
10
|
|
|
2.2.2 Les différents types de planification
|
10
|
|
|
2.2.3 Le processus de planification
|
11
|
|
|
2.2.4 Les intérêts et les limites de la
planification
|
12
|
|
2.3
|
Notions générales sur les problèmes
d'ordonnancement
|
12
|
|
|
2.3.1 Définition d'ordonnancement
|
12
|
TABLE DES MATIÈRES
|
|
2.3.2 Les tâches
2.3.3 Quelques définitions
2.3.4 Les ressources
2.3.5 Les contraintes
|
13
13
14
14
|
|
2.4
|
La gestion de la performance
|
15
|
|
|
2.4.1 Concepts sur la performance
|
15
|
|
|
2.4.2 Les typologies de la performance
|
16
|
|
|
2.4.3 La performance organisationnelle
|
16
|
|
|
2.4.4 Les mesures de la performance
|
17
|
|
2.5
|
L'impact de la planification sur la performance
|
18
|
|
2.6
|
Conclusion
|
18
|
|
3
|
Les outils de modélisation et les méthodes
de résolution
|
19
|
|
3.1
|
Introduction
|
19
|
|
3.2
|
Le diagramme de GANTT
|
19
|
|
3.3
|
Modélisation par les graphes
|
21
|
|
|
3.3.1 Notions de la théorie des graphes
|
21
|
|
|
3.3.2 Les représentations graphiques
|
23
|
|
|
3.3.3 La méthode PERT
|
24
|
|
|
3.3.4 La Méthode des Potentiels Métra (MPM)
|
27
|
|
3.4
|
Modélisation d'un problème d'ordonnancement par
la PL
|
28
|
|
|
3.4.1 Composants d'un problème d'optimisation
linéaire
|
28
|
|
|
3.4.2 Programmation linéaire en nombres entiers (PLNE)
|
29
|
|
3.5
|
Conclusion
|
30
|
|
4
|
Modélisation du problème
posé
|
31
|
|
4.1
|
Introduction
|
31
|
|
4.2
|
Problématique
|
31
|
|
4.3
|
Formulation mathématique
|
33
|
|
|
4.3.1 Les hypothèses
|
33
|
|
|
4.3.2 Les indices
|
33
|
|
|
4.3.3 Les notations
|
33
|
|
|
4.3.4 Les paramètres
|
33
|
TABLE DES MATIÈRES
4.3.5 Les variables de décision 33
4.3.6 La fonction objectif 34
4.3.7 Les contraintes 34
4.3.8 Le modèle mathématique 35
4.3.9 Type du modèle 35
4.3.10 Taille du modèle 35
4.4 Méthodes de résolution des PL 36
4.4.1 Les Méthodes exactes 36
4.4.2 Les Méthodes approchées 37
4.5 La modélisation avec solveur CPLEX 39
4.5.1 Présentation du solveur CPLEX 39
4.5.2 Le modèle en CPLEX 39
4.6 Conclusion 40
5 Résolution du problème et
implémentation 41
5.1 Introduction 41
5.2 Présentation de MATLAB 41
5.2.1 Pourquoi opter pour MATLAB? 42
5.3 Collecte des données 42
5.3.1 Décomposition du système 42
5.3.2 Détermination de la durée des tâches
44
5.4 Implémentation du problème 45
5.4.1 Présentation d'App Designer 45
5.4.2 Présentation de l'application 45
5.4.3 Fonctionnement de PlanningAPP 46
5.4.4 Présentation du résultat et commentaires
49
5.5 Conclusion 52
Bibliographie et Webographie 54
Conclusion générale 53
Table des figures
|
1.1
|
Direction générale
|
3
|
|
1.2
|
Organigramme de SONATRACH
|
7
|
|
1.3
|
Organigramme de la direction Corporate Stratégie,
Planification et
|
|
|
Économie
|
9
|
|
3.1
|
Un exemple du diagramme de GANTT
|
21
|
|
3.2
|
Concepts en résumé
|
24
|
|
3.3
|
Durée de la tâche A
|
26
|
|
3.4
|
Représentation d'une etape dans un réseau PERT
|
26
|
|
3.5
|
Tâche fictive
|
26
|
|
3.6
|
Principe MPM
|
28
|
|
4.1
|
Le Macro-processus du système de planification et de
gestion de la
|
|
|
performance
|
32
|
|
4.2
|
Organigramme récapitulatif des méthodes de
résolutions
|
38
|
|
4.3
|
Modélisation du problème sous CPLEX
|
39
|
|
5.1
|
La bibliothèque de composants d'App Designer
|
45
|
|
5.2
|
Identification
|
46
|
|
5.3
|
Message d'erreur
|
46
|
|
5.4
|
Bouton À propos
|
47
|
|
5.5
|
Fenêtre d'accueil
|
47
|
|
5.6
|
Bouton «...»
|
48
|
|
5.7
|
Fichier Excel importé
|
48
|
|
5.8
|
Bouton Aide
|
49
|
|
TABLE DES FIGURES
|
|
|
5.9
|
Tableau résultats
|
49
|
|
5.10
|
Résultats sous Excel
|
50
|
|
5.11
|
Tableau résultats 1
|
50
|
|
5.12
|
Tableau résultats 2
|
51
|
|
5.13
|
La durée totale du système
|
51
|
|
5.14
|
Solution graphique avec diagramme de GANTT
|
52
|
Liste des tableaux
|
2.1
|
Intérêts et limites de la planification.
|
12
|
|
2.2
|
Exemple de contraintes cumulatives
|
15
|
|
4.1
|
Tableau représentatif du nombre de variables
|
35
|
|
4.2
|
Tableau représentatif du nombre de contraintes
|
36
|
|
5.1
|
Tableau récapitulatif des tâches du système
de planification et de
|
|
|
gestion de la performance.
43
|
|
|
5.2
|
Tableau récapitulatif des durées, contraintes et
temps d'attente des
|
|
|
tâches du système.
44
|
|
Liste des abréviations
SPE : Direction Corporate Stratégie Planification et
Economie.
AOA : Activity-on-Arrow.
AON : Activity-on-Node.
EVA : Economic Value Added.
ROE : Return On Equity.
ROI : Return On Investment.
CPM : Critical Path Method.
MPM : Méthode des Potentiels Métra.
PDM : Precedence Diagram Method.
PERT : Program Evaluation and Review Technic.
PL : Programmation Linéaire.
PLNE : Programmation linéaire en nombres entiers.
D-F : Relation Début - Fin.
IBM : International Business Machines Corporation.
ILOG : Entreprise française, éditeur de
logiciels de gestion.
1
Introduction générale
Le secteur économique de l'énergie en
Algérie occupe une place prédominante dans l'économie du
pays, les hydrocarbures à eux seuls représentent 60 % des
recettes du budget de l'état et 98 % des recettes d'exportation.[17]
Depuis plus de 50 ans, SONATRACH joue pleinement son
rôle de locomotive de l'économie nationale. Elle a pour mission de
valoriser les importantes réserves en hydrocarbures de
l'Algérie.
Dans un monde industriel marqué par une concurrence
accrue, les entreprises sont confrontées à une demande de plus en
plus variable et fortement influencée par de nombreux facteurs
conjoncturels.
Compte tenu des défis qui attendent ces entreprises et
pour y faire face et avoir un coup d'avance sur la concurrence, la SONATRACH
doit s'inscrire dans une nouvelle dynamique plus agile et efficace
particulièrement dans son organisation et son fonctionnement. A cet
effet, une Direction Corporate Stratégie, Planification et Economie
(SPE) a été créée pour répondre aux nouveaux
enjeux stratégiques.
Cette dernière est chargée de
l'élaboration et le développement des plans à moyen et
long terme et d'évaluer leur mise en oeuvre.
La Direction Corporate Stratégie, Planification et
Economie (SPE) a élaboré un système intégré
de planification et de gestion de la performance qui est un outil qui contribue
à son pilotage stratégique, c'est au sein de ce système,
qui se compose de plusieurs processus, que se définit la
méthodologie d'élaboration de la stratégie de la
planification à long terme, le choix des indicateurs clés de
performance à mettre en place et la définition des cibles puis la
planification des prévisions à court terme. C'est aussi dans ce
système que se fait le suivi des réalisations et la
préparation
des informations fournies au top management et
nécessaires à la prise de décision pour
l'amélioration des performances. Comme il s'agit d'un processus à
visée décisionnelle, les délais revêtent une
importance capitale. Un besoin existe donc pour optimiser au maximum le
délai total de traitement.
Le but de notre travail est d'optimiser les délais de
réalisation d'un cycle complet dans un système
intégré de planification et de gestion de la performance.
Pour mener à bien notre mémoire, nous avons
élaboré le plan suivant:
Chapitre 1 : Une présentation générale de
l'organisme d'accueil en particulier la Direction Corporate Stratégie,
Planification et Economie (SPE) là où notre projet s'est fait et
suivi.
Chapitre 2 : Des généralités sur la
planification, l'ordonnancement et la gestion de performance afin de bien
comprendre les éléments de notre problème et nous aidera
à considérer l'ordonnancement des tâches dans le
système de planification et de la gestion de la performance lors de la
résolution.
Chapitre 3 : Etude des méthodes d'ordonnancement et les
techniques de modélisation des problèmes d'ordonnancement.
Chapitre 4 : Traitement de la problématique en
définissant l'objectif, la modélisation mathématique, le
type et l'évaluation de la taille du modèle avec une
présentation d'une brève description des méthodes de
résolution existantes, exactes ou approchées et la méthode
choisie pour la résolution du modèle ainsi qu'une
présentation du solveur CPLEX.
Chapitre 5 : Présentation de l'application
développée pour la résolution du problème ainsi que
l'implémentation des données collectées au sein de
l'entreprise.
2
Notre travail se termine par une conclusion
générale et quelques perspectives.
3
Chapitre1
Présentation de l'organisme d'accueil
1.1 Introduction
Ce chapitre présente la direction d'accueil, les
différentes structures et départements afin de localiser
l'emplacement de notre travail.
1.2 Historique de la SONATRACH
La SONATRACH (Société Nationale de Transport et
Commercialisation des Hydrocarbures) est une entreprise
pétrolière et gazière algérienne qui a vu le jour
le 31 décembre 1963, elle avait pour mission de prendre en charge le
transport et la commercialisation des hydrocarbures et de leurs
dérivés.

FIGURE 1.1 - Direction
générale
En 1965, la SONATRACH a pu réaliser son premier
défi qui était de concevoir et de poser le premier pipeline
Algérien.
Le 24 février 1971, SONATRACH a connu la plus grande et
la plus importante transformation de son histoire après que le
gouvernement ait décidé de nationaliser
4
Chapitre 1.Présentation de l'organisme
d'accueil
les hydrocarbures, sa tâche était de gérer
et de développer toutes les branches de l'industrie
pétrolière et gazière algérienne.
Le décret présidentiel n° 98-48 du
11 Février 1998 a modifié les statuts, la forme
juridique de SONATRACH et a défini son objet social et ses organes, ce
qui a donné naissance à une société par action
(SPA), employant environ 50 000 salariés (120 000 avec ses
filiales), produit à elle seule 30% du PNB de l'Algérie. [17]
Aujourd'hui, SONATRACH est la Compagnie Algérienne de
Recherche, d'Exploi-tation, de Transport par Canalisation, de Transformation et
de Commercialisation des Hydrocarbures et de leurs dérivés.
L'entreprise est également impliquée dans d'autres domaines tels
que la production d'électricité, les énergies nouvelles et
renouvelables et le dessalement de l'eau de mer. Elle est présente en
Algérie et partout dans le monde où il y a des
opportunités. Elle a déjà démarré ses
activités dans plusieurs pays en amont et en aval et compte actuellement
16 filiales nationales et 24 filiales internationales dans
l'exploitation, le raffinage la commercialisation, le stockage, les services
aux puits, etc.. Ce qui la rend la première entreprise du continent
Africain et 12eme parmi les compagnies
pétrolières mondiales. Sa production globale est de 230
millons de TEP en 2006. [17]
1.3 Organisation de l'entreprise
SONATRACH est organisée autour de ses métiers
dans les activités où se crée la richesse et en assurant
à ses activités appui et expérience à travers les
fonctions centrales du groupe, elle se résume en 3 points :
1.3.1 La Direction générale
La direction générale se compose essentiellement
d'un :
· Président Directeur Général
(PDG).
· Comité Exécutif.
· Secrétariat Général.
· Comité d'Ethique.
5
Chapitre 1.Présentation de l'organisme
d'accueil
1.3.2 Structures fonctionnelles
Les structures fonctionnelles ont pour role d'élaborer et
veiller à l'application des politiques et stratégies de la
société. Elles fournissent l'expertise et l'appui
nécessaires aux activités opérationnelles du groupe.
Elles sont organisées comme suit:
· Direction Corporate Stratégie, Planification et
Economie (SPE),
· Direction Corporate Finances (FIN),
· Direction Corporate Business Development et Marketing
(BDM),
· Direction Corporate Ressources Humaines (RHU),
· Direction Centrale Procurement et Logistique (PL),
· Direction Centrale Ressources Nouvelles (REN),
· Direction Centrale Engineering et Project Management
(EPM),
·
,
Direction Centrale Juridique (JUR)
· Direction Centrale Digitalisation et Système
d'Information (DSI),
· Direction Centrale Santé, Sécurité
et Environnement (HSE),
· Direction Centrale Recherche et Développement
(RD).
1.3.3 Activités de SONATRACH
Exploration et Production (E-P)
L'activité Exploration-Production a pour mission la
recherche, le développement, l'exploitation et la production des
hydrocarbures . Elle est chargée aussi de l'élabo-ration et de
l'application des politiques et stratégies d'exploration. Elle
s'articule autour de trois axes:
-- Le développement et l'exploitation des gisements
pour une valorisation optimale des ressources,
-- La gestion des activités en partenariat dans les
phases d'exploration, de développement et d'exploitation des
gisements,
-- La recherche, la négociation et le
développement de nouveaux projets sur le territoire national et à
l'international.
6
Chapitre 1.Présentation de l'organisme
d'accueil
Transport par Canalisations (TRC)
Le transport des hydrocarbures liquides et gazeux par
canalisations prend en charge le développement, la gestion et
l'exploitation du réseau de transport, de stockage, de livraison et de
chargement des hydrocarbures. [18]
L'activité TRC couvre les domaines operationnels
suivants:
-- Exploitation des ouvrages de transport des hydrocarbures
et des installations portuaires,
-- Maintenance des ouvrages de transport des hydrocarbures et
des installations portuaires,
-- Etudes et développement, à
l'éxclusion des activités relevant de la Direction Corporate
Business Development et Marketing (BDM) pour la partie étude et de la
Direction Centrale Engineering et Project Management pour la partie
developpement et realisation de projets.
Liquéfaction et Séparation (LQS)
L'activité Liquéfaction-Séparation a
pour mission la transformation des hydrocarbures par la liquéfaction du
gaz naturel et la séparation des GPL. Désormais
l'ac-tivité est concentrée principalement sur l'exploitation et
l'optimisation de l'outil de production tandis que le développement des
grands projets structurants en matière de GNL et GPL est assuré
par les nouveaux démembrements de la Direction Générale.
[18]
Raffinage et Pétrochimie (RP)
L'activité Raffinage et Pétrochimie a pour
mission essentielle l'exploitation et la gestion de l'outil de production du
Raffinage et de la Pétrochimie, pour répondre principalement
à la demande du marché national en produits pétroliers.
[18]
L'activité RP couvre les domaines operationnels
suivants:
-- Raffinage du Pétrole Brut et du Condensat, --
Pétrochimie.
Chapitre 1.Présentation de l'organisme
d'accueil
Commercialisation (COM)
L'activité Commercialisation a pour mission de veiller
aux approvisionnements énergétiques du marché national, sa
première mission statutaire en tant que garant du service public, et
à la valorisation des hydrocarbures liquides et gazeux, primaires et
transformés, exportés sur les marchés internationaux.
[18]
L'activité COM couvre les domaines operationnels
suivants:
-- Commercialisation du pétrole brut et produits
pétroliers,
-- Commercialisation gaz,
-- Elaboration et suivi de la mise en reuvre de la politique de
trading.
La figure suivante représente l'organisation de SONATRACH
:

7
FIGURE 1.2 - Organigramme de SONATRACH
8
Chapitre 1.Présentation de l'organisme
d'accueil
1.4 Missions de SONATRACH
SONATRACH a pour missions essentielles:
-- La prospection, la recherche et l'exploitation.
-- Le traitement de la liquéfaction du gaz naturel.
-- La transformation et le raffinage des hydrocarbures.
-- La séparation du GPL.
-- La commercialisation des hydrocarbures sur le marché
international.
-- L'approvisionnement des hydrocarbures liquides et gazeux sur
le marché na-
tional.
-- Le développement de toute forme d'activités
conjointe en Algérie et à l'étran-
ger avec les sociétés algériennes ou
étrangères.
1.5 Présentation de la Direction d'accueil : La
Direction SPE
La Direction Corporate Stratégie, Planification et
Economie (SPE) est chargée de l'élaboration et le
développement à moyen et long terme et d'évaluer leur mise
en oeuvre.
1.5.1 Organisation de la Direction SPE
Sous les commandes d'un vice président, la direction
Corporate Stratégie, Planification et Économie (SPE) est
organisée autour de :
· Une Direction Stratégie et intelligence
Economique,
· Une Direction Planification,
· Une Direction Gestion de la Performance,
· Une Direction Etudes Economiques et Modèles,
· Une Direction Organisation,
· Une Direction Informations Documentaires,
· Une Direction Administration et Logistique,
· Des Conseillers.
La figure ci-dessous représente l'organigramme de la
direction Corporate Stratégie, Planification et Economie :
9
Chapitre 1.Présentation de l'organisme
d'accueil

FIGURE 1.3 - Organigramme de la direction
Corporate Stratégie, Planification et Économie
1.5.2 Missions de la Direction SPE
La Direction Corporate Stratégie, Planification et
Economie a pour missions essentielles :
· L'animation du processus de formulation, d'adoption et
de suivi de la mise en oeuvre de la stratégie de la
Société,
· L'organisation, l'animation et la coordination du
processus de planification, en particulier les plans a moyen terme et les plans
annuels,
· L'organisation, l'animation, la coordination et le
contrôle du processus de gestion et de suivi des performances,
· L'organisation, l'animation et la coordination du
cadrage stratégique de la Société,
· L'élaboration des études
économiques des projets de la Société,
· L'élaboration, le suivi et la mise en oeuvre
d'un système d'évaluation économique du portefeuille de la
Société en Algérie et a l'étranger.
1.6 Conclusion
Dans ce chapitre nous avons présenté la
SONATRACH d'une façon générale en se basant sur la
Direction Corporate Stratégie, Planification et Economie (SPE) là
où notre projet s'est fait et suivi.
10
Chapitre2
Généralités sur la planification,
l'ordonnancement et la performance
2.1 Introduction
Dans ce chapitre nous aborderons differentes notions sur la
planification, l'or-donnancement et la performance
2.2 La planification
La planification est un élément qui joue un
rôle clé dans le succès d'une entreprise. En
rédigeant un plan stratégique détaillé,
l'entreprise peut se donner un mandat et adopter une marche à suivre qui
lui permettra de connaître le succès.[19]
2.2.1 Définition
La planification est un processus qui permet d'organiser dans le
temps une succession d'actions ou d'évènements afin de
réaliser un objectif particulier ou un projet.
2.2.2 Les différents types de planification La
planification stratégique:
· S'étale sur plus de 5 ans.
· Analyse certains aspects de l'environnement externe et de
repérer les forces et les faiblesses.
· Déterminer la mission et les objectifs
généraux de l'entreprise.
11
Chapitre 2.Généralités sur la planification,
l'ordonnancement et la performance
La planification à moyen terme:
· Couvre une période de cinq ans au maximum.
· Elaboration des plans détaillés,
coordonnés, qui concerne la production, la commercialisation et les
ressources humaines...
La planification à court terme:
· S'étale sur une période pas plus qu'un
an.
· Les cadres inférieurs définissent les
tâches à accomplir les programmes, les projets, les
opérations et les activités propres à leurs unités
organisationnelles.
2.2.3 Le processus de planification
1 - L'analyse de la situation:
Il s'agit au niveau de cette étape de faire un
diagnostic. Le diagnostic:
L'objectif d'un diagnostic est de déterminer si celle-ci
se porte bien ou mal et de détecter ses dysfonctionnements.
Les phases du diagnostic:
· Analyse préalable de la stratégie à
travers sa definition et l'appréciation de sa pertinence et son
adéquation avec l'environnement.
· Analyse du potentiel interne:
- Evaluation des moyens humains (effectifs, salaires,
qualifications...) et leurs
adéquation avec les besoins de l'entreprise.
- Evaluation des moyens financiers.
- Evaluation des moyens techniques.
· Analyse de l'environnement par la collecte et l'analyse
des informations.
2 - La formulation de la mission et des objectifs:
C'est une étape cruciale, puisque la mission et les
objectifs servent de point de départ et d'encadrement aux
activités de tous les services, les divisions et les unités
administratives.
La mission est la description
générale et durable de l'entreprise, elle correspond à la
raison pour laquelle elle est crée.
Un Objectif se définit par quatre composantes : une
dimension, une échelle de mesure, une norme et un horizon temporel. Il
peut être stratégique, tactique ou opérationnel.
12
Chapitre 2.Généralités sur la
planification, l'ordonnancement et la performance
2.2.4 Les intérêts et les limites de la
planification
Intérêts
|
Limites
|
- Incite à l'utilisation d'un processus uniforme.
- Force les gestionnaires à examiner tous les
programmes,
les projets et les activités d'une façon
systématique.
- Permet de saisir des opportunités.
- Fournit une base de contrôle.
- Equilibre l'utilisation des moyens de l'entreprise.
|
- Coûteuse.
- Risque d'erreur.
- Peu flexible dans
un environnement
turbulent et
incertain.
|
|
TABLE 2.1 - Intérêts et limites de la
planification.
2.3 Notions générales sur les
problèmes d'ordonnancement
L'ordonnancement se situe exactement dans la phase
planification. Il réalise le suivi opérationnel du projet :
gestion de ressources, suivi de l'avancement, lancement des activités.
Techniquement, ordonnancer un projet consiste à programmer dans le temps
l'exécution des tâches, tout en respectant les contraintes de
manière à optimiser les critères de performance
retenus.
2.3.1 Définition d'ordonnancement
Selon Carlier et al. [1], "ordonnancer, c'est programmer
l'exécution d'une réalisation en atribuant des ressources aux
tâches et en fixant leur date d'exécution". On peut
définire une autre définition qui est plus explicite : "Un
ordonnancement constitue une solutio au problème d'ordonnancement. Il
décrit l'exécution des tâches et l'allocation des
ressources au cours du temps, et vise à satisfaire un ou plusiseurs
objectifs. Plus précisement, on parle de problème
d'ordonnancement lorsqu'on doit déterminer les dates de début et
de fin des tâches, alors qu'on réserve le terme de problème
de séquencement au cas où l'on cherche seulement à fixer
un ordre relatif entre les tâches qui peuvent être en conflit pour
l'utilisation des ressources. Un ordonnancement induit nécessairement un
ensemble unique de relations de séquencement"[2].
Chapitre 2.Généralités sur la
planification, l'ordonnancement et la performance
2.3.2 Les tâches
Une tâche ou activité est une entité
élémentaire localisée dans le temps.
Chaque tâche:
-- est identifiée par son rôle à jouer dans
l'éxécution du travail.
-- se caractérise par un début et une fin.
-- consomme des ressources qui ont un coût d'utilisation
et sont disponibles en
quantité limitée.
-- est souvent reliée aux autres tâches par des
relations d'antériorité qui im-
pliquent qu'une tâche ne peut débuter avant qu'une
autre ne soit préalable-
ment terminée.
2.3.3 Quelques définitions
- Date début au plus tôt: c'est la
date la plus prématurée à laquelle une activité
peut commencer.
- Date début au plus tard: c'est la date
la plus tardive à laquelle une activité peut commencer sans
tarder la tâche suivante.
- Date fin au plus tôt: c'est la date
plus hâtive dont une tâche peut prendre fin.
- Date fin au plus tard : c'est la date la plus
tardive dont une tâche peut prendre fin sans retarder la tâche
suivante.
- La marge libre : c'est la réserve de
temps dont on dispose sur une tâche (i, j) qui permet,
si elle est consommée, de ne pas retarder les dates au plus tôt
des tâches ultérieures. Elle est définie par:
m j = èj - (è +
d j)
où
èj : date fin au plus tôt de la
tâches (i, j).
è : date début au plus tôt de la
tâches (i, j). d j : durée de la
tâches (i, j).
- La marge totale : est la réserve du
temps sur la tâches (i,j) qui si elle est consommée, fait que
cette tâches se ramènera à sa date au plus tard. Elle est
définie par:
M j = è* j - (è +
d j)
13
où è* j : date fin au plus tard.
14
Chapitre 2.Généralités sur la planification,
l'ordonnancement et la performance
2.3.4 Les ressources
Une ressources est un moyen technique ou humain
utilisé pour réaliser une tâche. On distingue deux types de
ressources :
- Les ressources renouvelables, qui
après avoir été allouées à une tâche,
redeviennent disponibles (machines, personnel,...).
- Les ressources consommables, qui
après avoir été allouées à une tâche,
ne sont plus diponibles ( matières premières, argent,...).
Qu'elle soit renouvelable ou consommable, la
disponibilité d'une ressource peut varier au cours du temps. par
ailleurs, dans le cas des ressources renouvelables, on distingue principalement
les ressources disjonctives qui ne peuvent exécuter
qu'une tâche à la fois et les ressources cumulatives
qui peuvent être utilisées par plusieurs tâches
simulatanément mais en nombre limités.
2.3.5 Les contraintes
Une contrainte est une restriction sur les valeurs que
peuvent prendre une ou plusieurs variables de décision sur le temps
(variable d'ordonnancement) ou bien sur les ressources (variables
d'affectation).[5]
Nous pouvons distinguer plusieurs types d'entre elles :
- Les contraintes potentielles : qui peuvent
être de deux sortes:
· Les contraintes d'antériorité selon
lesquelles une tâche j ne peut commencer avant qu'une tâche i ne
soit terminée.
· Les contraintes de localisation temporelle impliquant
qu'une tâche donnée i ne peut débuter avant une date
imposée, ou qu'elle ne peut s'achever après une date
imposée.[6]
- Les contraintes disjonctives:
Une contrainte disjonctive impose la non-réalisation
simultanée de deux tâches. Ou comme dans le cas d'utilisation
d'une ressource présente en un seul exemplaire (une machine,un ouvrier,
etc.) ou pour exprimer les interdictions de réalisation
simultanée pour des raisons de sécurité ou des
problèmes d'espace.[7]
- Les contraintes cumulatives:
On parle de contraintes cumulatives lorsque les tâches
demandent une partie d'une ou plusieurs ressources présentes en
quantité limitée. Le problème est beaucoup plus
combinatoire que pour les contraintes disjonctive. Considérons l'exemple
où nous avons cinq intervenants et cinq tâches à effectuer.
Chaque tâche demande la présence d'un certain nombre de ces
intervenants. [8]
15
Chapitre 2.Généralités sur la
planification, l'ordonnancement et la performance
Tâche
|
A
|
B
|
C
|
D
|
E
|
Nombre d'intervenants
|
4
|
3
|
2
|
1
|
1
|
|
TABLE 2.2 - Exemple de contraintes
cumulatives
Pour que l'ordonnancement soit réalisable, il faut qu'on
utilise, à tout moment, au plus cinq intervenants. Cette contraintes va
interdire les ordonnancements réalisant en parallèle: (A//B),
(A//C), (A//D//E), (B//C//D), (B//C//E). Ces configurations sont minimales
au sens que, si (A//B) est interdit, toute configuration contenant
(A//B) l'est aussi (par exemple: (A//B//D), (A//B//C//D),
ect).
2.4 La gestion de la performance
Le terme de performance intéresse de plus en plus les
entreprises et utilisé par celle-ci dans l'appréciation de leurs
activités. En effet, la performance se réfère à la
capacité de l'entreprise à concrétiser ses objectifs
stratégiques en adoptant les meilleures façons de faire.
Cette section sera consacrée à la
présentation de quelques généralités sur la
performance.
2.4.1 Concepts sur la performance
La performance est un concept englobant et
intégrateur, donc, difficile à définir de façon
précise.
Pour mieux cerner le concept de la performance, il est utile
de montrer quelques définitions proposées par quelques
auteurs:
Selon L'ORINO Philipe : « la performance dans une
entreprise est tout ce qui, et seulement ce qui contribue à atteindre
ces objectifs stratégiques ».[14]
Pour DIMITRE WEISS : « la performance pour un
salarié, pour un chef d'entreprise, peut- être pour une
équipe dans la direction, le résultat global, le profit
apprécié sur une ou plusieurs années, mesurant
objectivement l'efficacité de la gestion ». [15]
D'après KHEMAKHEM. A : « la performance d'un
centre de responsabilité (atelier, service, unité, entreprise,
branche,...) Désigne l'efficacité et la productivité dans
laquelle ce centre de responsabilité a atteint les objectifs qu'il avait
acceptés ». [16]
De ces définitions nous pouvons dire que la notion de
la performance découle du degré d'atteinte des objectifs.
Autrement dit, la performance réside là où il y'a une
conformité entre les résultats obtenus et les objectifs
tracés.
16
Chapitre 2.Généralités sur la planification,
l'ordonnancement et la performance
Aussi la performance peut être la réponse au
besoin, ni plus coûteux ni moins insuffisant en termes de
quantité, de qualité, de coût et de temps.
D'une manière générale, la performance est
un résultat chiffré obtenu dans le cadre d'une
compétition.
Au niveau d'une entreprise, la performance exprime le
degré d'accomplissement des objectifs poursuivis.
Une entreprise performante doit être à la fois
efficace et efficiente. Elle est efficace lorsqu'elle atteint les objectifs
qu'elle s'est fixés. Elle est efficiente lorsqu'elle minimise les moyens
mis en oeuvre pour atteindre les objectifs qu'elle s'est fixés.
2.4.2 Les typologies de la performance
Appréhendée d'une manière
générale sur un plan strictement financier, la performance de
l'entreprise a été progressivement élargie au cours du
vingtième siècle (Germain et Trébucq; 2004) pour
considérer d'autres aspects tels que les aspects économiques,
commerciaux, sociaux et sociétaux. Parmi ces aspects, il est possible de
distinguer:
· La performance financière.
· La performance économique.
· La performance sociale.
· La performance technique.
· La performance organisationnelle.
· La performance managériale.
· La performance sociétale.
· La performance commerciale.
· La performance concurrentielle.
Dans notre travail on s'intéresse à la performance
organisationnelle :
2.4.3 La performance organisationnelle
Elle concerne la manière dont l'entreprise est
organisée pour atteindre ses objectifs, et la façon dont elle
parvient à les atteindre. Il existe quatre facteurs de
l'effica-cité organisationnelle, à savoir:
· Le respect de la structure formelle;
· Les relations entre les composants de l'organisation;
· La qualité de la circulation de l'information;
· La flexibilité de la structure.
17
Chapitre 2.Généralités sur la
planification, l'ordonnancement et la performance
Dans cette conception, la performance de l'entreprise
résulte de la valeur de son organisation. Cette dernière est
déterminante et c'est elle qui impose ses exigences au système
social. [13]
2.4.4 Les mesures de la performance
La performance se mesure avec des critères (ou
indicateurs) qualitatifs ou quantitatifs de résultat. Pour mesurer
l'efficacité, on utilise un critère qui exprime un rapport entre
le résultat obtenu et l'objectif visé. Pour mesurer l'efficience,
on utilise un critère qui exprime un rapport entre le résultat
obtenu et les moyens mis en oeuvre.
Pour évaluer la performance d'une entreprise, il est
nécessaire d'effectuer des mesures à tous les niveaux :
financier, économique, social, organisationnel et sociétal.
La performance financière:
Traditionnellement, d'après Alfred Sloan, on mesure la
performance financière à l'aide des indicateurs ROI et ROE.
Aujourd'hui, on utilise en plus l'indicateur EVA.
· Le ROI (Return On Investment) : ce ratio mesure la
rentabilité économique du capital utilisé par
l'entreprise. C'est le rapport entre le résultat d'exploitation et les
capitaux investis.
· Le ROE (Return On Equity) : ce ratio mesure la
rentabilité financière des capitaux apportés par les
propriétaires de l'entreprise. C'est le rapport entre le résultat
net et les capitaux propres.
· L'EVA (Economic Value Added) : ce ratio permet de
mesurer la création de valeur pour l'actionnaire. C'est la
différence entre le résultat opérationnel et les capitaux
investis.
La performance économique:
Il s'agit de mesurer les composantes de la
compétitivité de l'entreprise : la
compétitivité-prix et la compétitivité-hors
prix.
· La compétitivité-prix: désigne la
capacité d'un produit à attirer des clients au détriment
des produits concurrents du fait de son prix. Sa mesure permet de situer la
place de l'entreprise sur le marché par rapport à ses
concurrents.
· La compétitivité hors-prix:
désigne la capacité d'un produit à attirer des clients au
détriment des produits concurrents du fait des éléments
indépendants du prix. Elle est obtenue grâce à des
éléments comme la qualité des produits, l'innovation, le
service, le design...
18
Chapitre 2.Généralités sur la
planification, l'ordonnancement et la performance
La performance organisationnelle:
Il s'agit de mesurer la performance de l'entreprise au niveau
de la qualité de la production, de la flexibilité, des
délais...
La performance sociale:
Le bilan social récapitule les principales
données chiffrées permettant d'apprécier la performance
sociale et les rapports sociaux au sein d'une entreprise. En France, le bilan
social est obligatoire pour les entreprises de plus de 300 salariés.
Parmi les nombreux indicateurs sociaux, on peut citer : le montant des
rémunérations, le nombre d'accidents de travail, les maladies
professionnelles ...
La performance sociétale :
Indique l'engagement de l'entreprise dans les domaines
environnementaux, humanitaires, culturels. Les outils de la
responsabilité sociétale de l'entreprise (RSE) peuvent être
utilisés pour apprécier le niveau de performance de l'entreprise.
[24]
2.5 L'impact de la planification sur la
performance
Les entreprises se mesurent toujours par leurs performances.
Une performance plus forte et durable doit impérativement prendre ses
bases sur une planification stratégique bien étudiée
surtout dans un milieu où les données sont bien définies
car les spécialistes disent qu'il y a une relation positive entre la
planification qui est faite dans une entreprise et les résultats que
cette entreprise est capable d'atteindre et l'absence d'une planification est
une cause importante de faillite.
2.6 Conclusion
Dans ce deuxième chapitre nous avons donné des
généralités sur la planification, l'ordonnancement et la
gestion de la performance.
En comprenant les éléments de la planification
et de la gestion des performances, cela nous aidera à considérer
l'ordonnancement des tâches dans le système de planification et de
la gestion de la performance de Sonatrach lors de la résolution, mais
avant cela il faut d'abord étudier les méthodes d'ordonnancement
et les techniques de modélisation de ces problèmes
d'ordonnancement, ce qui fera l'objet de prochain chapitre.
19
Chapitre3
Les outils de modélisation et les
méthodes de résolution
3.1 Introduction
La modélisation mathématique est une traduction
des observation à l'aide d'ou-tils, techniques et théories
mathématiques.
Il s'agit d'une étape cruciale dans l'étude de
tout problème dans la recherche opérationnelle.
Dans ce qui suit, nous étudierons les méthodes
d'ordonnancement et les techniques de la modélisation des
problèmes d'ordonnancement qui nécessitent la connaissance de
certains concepts de base de la théorie des graphes et de la
programmation linéaire.
3.2 Le diagramme de GANTT
Le diagramme de GANTT n'est pas une méthode pour
résoudre les problème d'ordonnancement mais seulement une
méthode pour représenter une solution.
Définition
Le diagramme de GANTT est un outil utilisé en
ordonnancement et en gestion de projet, permettant de modéliser la
planification de tâches nécessaires à la réalisation
d'un projet. Il a été mis au point par Henry GANTT en 1917. Un
diagramme de Gantt répertorie toutes les tâches à accomplir
pour mener le projet à bien, et indique la date à laquelle ces
tâches doivent être effectuées (le planning).
20
Chapitre 3.Les outils de modélisation et les
méthodes de résolution
Etant donné la relative facilitée de lecture
des diagrammes GANTT, cet outil est utilisé par la quasi-totalité
des chefs de projet dans tous les secteurs, permettant de représenter
graphiquement l'avancement du projet, mais c'est également un bon moyen
de communication entre les différents acteurs d'un projet.
Pour ce type de modélisation il existe plusieurs
outils spécialisés dont les plus connus est Microsoft Project et
Primavera.[25]
Principe
Le principe de ce type de diagramme est de représenter
au sein d'un tableau telle que chaque tâche est représentée
par une ligne, tandis que les colonnes représentent les unités de
temps (exprimées en jours, semaines , mois...).
Le temps estimé pour une tâche se
modélise par une barre horizontale dont l'extré-mité
gauche est positionnée sur la date prévue de démarrage et
l'extrémité droite sur la date prévue de fin de
réalisation. Les tâches peuvent s'enchaîner
séquentielle-ment ou bien être exécutées en
parallèle. Ce diagramme permet donc de visualiser d'un seul coup
d'oeil:
- Les différentes tâches à envisager.
- La date de début et la date de fin de chaque
tâche.
- La durée comptée de chaque tâche.
- Le chevauchement éventuel des tâches, et la
durée de ce chevauchement.
- La date de début et la date de fin du projet dans son
ensemble.[11]
Réalisation
Les différentes étapes de réalisation d'un
diagramme de Gantt sont les suivantes:
- Etape 1 : On définit les différentes
tâches à réaliser et leurs durées.
- Etape 2 : On détermine les relations
d'antériorité entre tâches.
- Etape 3 : On représente les tâches par des
traits dans le diagramme : d'abord les tâches n'ayant aucune
antériorité, puis les taches dont les tâches
antérieures ont déjà été
présentées, et ainsi de suite. . .
- Etape 4 : On représente la progression réelle
du travail par un trait pointillé parallèle à la
tâche planifiée.
Exemple
La figure ci-dessous représente un diagramme de Gantt,
où chaque colonne représente une unité de temps, les
traits épais représentent les durées d'exécution
prévues des tâches et les traits pointillés
représentent le déroulement d'exécution.
21
Chapitre 3.Les outils de modélisation et les
méthodes de résolution
Par exemple, la tâche B, qui dure 5 unités de
temps, ne peut commencer son exécution qu'après la fin de la
tâche A et elle peut s'exécuter en même temps que la
tâche C.

FIGURE 3.1 - Un exemple du diagramme de GANTT
Le chemin critique est formé d'une succession de
tâches sur le chemin le plus long en terme de durées (A,B,D,E dans
l'exemple). Il est appelé chemin critique parce que tout retard pris sur
l'une des tâches de ce chemin entraîne du retard dans
l'achèvement du projet.
Avantages et limites
Le diagramme de GANTT est l'un des outils les plus efficaces
pour une visualisation rapide et facile de l'avancement du projet, il permet
aussi de déterminer la date de réalisation d'un projet et
d'identifier les marges existantes sur certaines tâches (avec une date de
début au plus tôt et une date de fin au plus tard).
Son point faible est que son application est limitée
à des problèmes particuliers.
3.3 Modélisation par les graphes
3.3.1 Notions de la théorie des graphes
Graphe
Un graphe est un dessin géométrique
défini par la donnée d'un ensemble de points (appelées
sommets ou noeuds), reliés entre eux par un ensemble de flèches
(Appelées arcs). Chaque arc a pour extrémités deux points,
éventuellement confondus.[3]
22
Chapitre 3.Les outils de modélisation et les
méthodes de résolution
Graphe orienté
En théorie des graphes, un graphe orienté C
= (X, A) est défini par la donnée d'un ensemble de
sommets X et d'un ensemble d'arcs A, chaque arc étant un couple
de sommets. Par exemple, si x et y sont des sommets, les
couples (x, y) et (y, x) peuvent être des arcs du
graphe C :
dans ce cas, ils sont notés respectivement xy et
yx.
Chemin
Soit C = (X, U) un graphe,
Un chemin du sommet X0 à Xk dans un
graphe C, est une suite de sommets reliés successi- vement par
des arcs orientés dans le même sens;
On le note : (X0, X1, X2, ...,
Xk)
- Le chemin critique : d'un projet est la plus longue
séquence de tâches qui doit être accomplie pour que le
projet soit terminé à la date due.[3]
Circuit
Le circuit est un chemin simple dont les
extrémités coïncident. (dans les graphes orienté
seulement).
Réseau
Un réseau est un graphe C = (X, U)
muni d'une application d : U R qui à chaque
arc fait correspondre un poids d(u), on note un tel
réseau par R = (X, U, d). On pratique
d(u) peut matérialiser un coût, une distance,
une durée ...etc.
Arbre
Un arbre est un graphe simple connexe ne possédant pas de
cycle. Soit n le nombre de sommets d'un graphe G et m le nombre de ses
arcs:
- Si C est connexe m = n - 1.
- Si C est sans cycles m = n - 1.
Arborescence
Un graphe C = (X, U), avec |X| =
n = 2 sommets est une arborescence de racine s si :
- C est un arbre.
- S est une racine de C.
23
Chapitre 3.Les outils de modélisation et les
méthodes de résolution
Un sommet s d'un graphe G est une racine de
G s'il existe un chemin joignant s à chaque sommet du
graphe G.
Un sommet z d'un graphe G est une
anti-racine de G s'il existe un chemin joignant chaque sommet du
graphe G à z.
Makespan
C'est la date de fin d'exécution de l'ordonnancement
(Cmax).
La mise en ordre d'un graphe (l'ordonnancement d'un
graphe)
Ordonner un graphe revient à disposer dans un certain
ordre ses sommets tels que les arcs soient dans le même sens. On
définit ainsi les différents niveaux des sommets.
L'ordonnancement d'un graphe se traduit par un algorithme.
Recherche du plus court (long) chemin dans un
graphe:
Les problèmes de cheminement dans les graphes (en
particulier la recherche d'un plus court chemin) comptent parmi les
problèmes les plus anciens de la théorie des graphes et les plus
importants par leurs applications.
pour la résolution de ces problèmes,il existe
plusieurs algorithmes qui calcule le plus court (long) chemin,le plus courant
est l'algorithme de Bellman.
L'idée de l'algorithme de Bellman, est de calculer de
proche en proche l'arbores-cence de plus courtes distances, issue du sommet s
à un sommet donné p.
On ne calcule la plus courte distance du sommet s
à y, que si on a déjà calculé les
plus courtes distance du sommet s à tous les
prédécesseurs du sommet y.
3.3.2 Les représentations graphiques
Il y'a principalement deux représentations graphique
d'un projet:
- La représentation AON (Activity-on-Node) ou «
Potentiel-tâches ».
- La représentation AOA (Activity-on-Arrow) ou
«Potentiel-étapes ».
Les abréviations AON et AOA signifient successivement
: Activity On Network et Activity On Arc. Ces deux notions sont
utilisées dans la représentation par le biais d'un réseau
de gestion de projet, à son tour faisant partie d'une branche plus
générale et plus large : La Théorie des Graphes. Cette
dernière est utilisée notamment dans plusieurs domaines comme le
transport, les réseaux neurones ou l'optimisa-tion etc. Ces deux
concepts ont été développés dans les années
50, AON pour établir ce qu'on appelle le chemin critique d'un planning
de projet et AOA dans la méthode
Chapitre 3.Les outils de modélisation et les
méthodes de résolution
(graphe) de PERT, AON est utilisé notamment dans la
méthode appelée PDM (Precedence Diagram Method), Cette
dernière est utilisée entre autres, dans le CPM (Critical Path
Method) pour déterminer le chemin critique.[4]
Les méthodes utilisant la représentation AON sont
MPM et PDM.
Les méthodes utilisant la représentation AOA sont
: PERT et CPM.

24
FIGURE 3.2 - Concepts en
résumé
A ce jour seules sont appliquées industriellement les
méthodes simples : la méthode PERT et la méthode des
potentiels MPM.
3.3.3 La méthode PERT
Le terme PERT est l'acronyme de «Program Evaluation and
Review Technic» ou «program evaluation research task ». Sa
traduction française serait : «technique d'évaluation et
d'examen de programmes» ou « de projets », ou encore «
technique d'élaboration et de mise à jour de programme ».
"Program Evaluation and Review Technic" est une
méthode conventionnelle utilisable en gestion de projet "gestion de
temps et des délais", ordonnancement et planification créé
en 1958 à la demande de la marine américaine, qui voulait
planifier la durée de son programme de missiles balistiques
nucléaires miniaturisés Polaris. Alors que le délai
initial de ce programme qui a fait intervenir 9000 sous-traitants et 250
fournisseurs était de 7 ans, l'application de la technique du PERT a
permis de réduire ce délai à 4 ans. [26]
25
Chapitre 3.Les outils de modélisation et les
méthodes de résolution
Objectif de la méthode PERT
La méthode PERT est une technique permettant de
gérer l'ordonnancement dans un projet. Elle consiste à
représenter sous forme de graphe , un réseau de tâches dont
l'enchaînement permet d'aboutir à l'atteinte des objectifs d'un
projet.
La méthode permet:
-- La prise en compte des différentes tâches
à réaliser et des antériorités à respecter
entre ces tâches.
-- La détermination de la durée globale du
projet et des tâches qui la conditionnent.
-- La détermination des tâches pour lesquelles
du temps est disponible (notion de marge).
-- La détermination des dates « au plus tôt
» et « au plus tard » pour lancer chaque tâche.
-- L'établissement d'un planning d'exécution et
d'enchaînement des tâches. -- La nomination d'un chef de projet
chargé d'assurer le suivi du projet, de rendre
compte si nécessaire et de prendre des
décisions en cas d'écart par rapport aux
prévisions.
-- La gestion des moyens logistiques (matériels) et
humains (effectif) intervenant sur le projet. [26]
Principe du réseau PERT
Le diagramme PERT propose de calculer, à l'aide d'un
graphe, l'enchaînement optimal des tâches. Chaque tâche est
identifiée par sa durée moyenne et sa précé-dence.
Le graphe propose ainsi pour chaque tâche une date "au plus tôt" et
une date "au plus tard". Tant que la tâche démarre à une
date comprise entre ces deux limites, elle ne pénalisera pas les
tâches avales.
Le graphe PERT est caractérisé par des sommets
(étapes) reliés ente eux par des arcs (tâches) chaque arc
étant défini par son début, sa fin, sa durée et les
sommets entre les arcs définissant les relations
d'antériorité. Ce graphe ne comportera ni routeur ni circuit et
on ne rencontrera qu'un seul arc ente deux sommets.
Ainsi, pour élaborer et exploiter un réseau on
peut distinguer six grandes étapes:
-- Etablir la liste des tâches;
-- Déterminer les conditions
d'antériorité;
-- Tracer le réseau PERT;
-- Calculer les dates des tâches et déterminer le
chemine critique;
-- Calculer les marges totales et les marges libres de chaque
tâche;
-- Construire le planning de projet;
26
Chapitre 3.Les outils de modélisation et les
méthodes de résolution
Symboles de la représentation du graphe
PERT
Le réseau PERT (appelé parfois graphe PERT) est
composé des éléments suivants:
· Tâche (parfois activité),
représentée par une flèche (arc). A chaque tâche
correspond un code et une durée. Néanmoins, la longueur de la
flèche est indépendante de la durée.
FIGURE 3.3 - Durée de la tâche A
· Étape, c'est-à-dire le début et
la fin d'une tâche. Chaque tâche possède une étape de
début et une étape de fin. A l'exception des étapes
initiales et finales, chaque étape de fin est étape de
début de la tâche suivante. Les étapes sont en règle
générale numérotées et représentées
par un cercle, mais elles peuvent parfois avoir d'autres formes (carré,
rectangle, ovale, etc.).

FIGURE 3.4 - Représentation d'une etape dans un
réseau PERT
· Tâche fictive, représentée par une
flèche en pointillés, permet d'indiquer les contraintes
d'enchaînement entre certaines étapes.
FIGURE 3.5 - Tâche fictive
Avantages de PERT
PERT permet:
-- La visualisation de la dépendance des tâches
et de procéder à leur ordonnancement.
-- La prise en compte des différentes tâches
à réaliser et des antériorités à respecter
entre ces tâches.
27
Chapitre 3.Les outils de modélisation et les
méthodes de résolution
-- La détermination de la durée globale du
projet et des tâches qui la conditionnent.
-- La détermination des tâches pour lesquelles
du temps est disponible (notion de marge).
3.3.4 La Méthode des Potentiels Métra (MPM)
Définition
La Méthode des Potentiels et antécédents
Métra (MPM) fait partie des méthodes dites
"potentiel-tâches". La Méthode MPM est une méthode
d'ordonnancement basée sur la théorie des graphes, et visant
à optimiser la planification des tâches d'un projet. Semblable
à PERT, les principales différences entre les deux
méthodes reposent essentiellement dans la construction du graphe. Elle a
été développée par le chercheur français
Bernard Roy, en 1958.
L'utilisation de la MPM permet de :
· Déterminer la durée minimum
nécessaire pour mener à bien un projet et les dates auxquelles
peuvent ou doivent débuter les différents tâches
nécessaires à sa réalisation pour que cette durée
minimum soit respectée.
· Calculer les marges des différentes
tâches et identifier les intervalles de flottements.
· Etudier les couts de réalisation de chaque
tâche et le coût global du projet.[27]
Principe
-- Chaque tâche est représentée par un
sommet, et les arcs entre les sommets traduisent uniquement les relations
d'anteriorité des tâches.
-- Chaque tâche (ou sommet) est renseignée par
la date à laquelle elle peut commencer au plus tôt (date de
début au plus tôt) et terminer au plus tard (date de fin au plus
tard) pour respecter le délais optimal de réalisation du
projet.
-- A chaque arc est associée une valeur
numérique qui représente soit une durée
d'opération, soit un délai.
-- Le graphe commence et se termine par 2 sommets,
respectivement appelés Début et Fin symbolisant le début
et la fin des opérations. (ces deux sommets
28
Chapitre 3.Les outils de modélisation et les
méthodes de résolution
ne correspondent pas à une tâche).
-- Le graphe se lit de gauche à droite (du sommet
"DEBUT" à celui de "FIN").

FIGURE 3.6 - Principe MPM
3.4 Modélisation d'un problème
d'ordonnancement par la PL
L'importance de l'optimisation et la nécessite d'un
outil simple pour modéliser des problèmes de décision que
soit économique, militaire ou autres on fait de la programmation
linéaire un des champs de recherche les plus actifs au milieu du
siècle précédent. Les premiers travaux (1947) sont celle
de George B. Dantzig et ses associés du département des forces de
l'air des Etats Unis d'Amérique. Les problèmes de programmations
linéaires sont généralement liés à des
problèmes d'allocations de ressources limitées, de la meilleure
façon possible, afin de maximiser un profit ou de minimiser un
coût. Le terme meilleur fait réfrence à la
possibilité d'avoir un ensemble de décisions possibles qui
réalisent la même satisfaction ou le même profit. Ces
décisions sont en général le résultat d'un
problème mathématique. [28]
3.4.1 Composants d'un problème d'optimisation
linéaire
Tous les programmes linéaires comportent trois
éléments capitaux:
-Variables de décision : ce sur quoi porte la
décision, ce qui permet d'exprimer les contraintes et la fonction
objectif.
-Fonction objectif: elle sert de critère pour
déterminer la meilleure solution à un problème
d'optimisation. À chaque variable de décision, correspond un
coeffecient
29
Chapitre 3.Les outils de modélisation et les
méthodes de résolution
économique indiquant la contribution unitaire de la
variable correspondante à l'ob-jectif poursuivi.
-Les contraintes : dans la problèmatique de la
décision, il faut être en mesure d'iden-tifier tout genre de
restriction (main d'oeuvre, espace, budget,...) qui peut limiter les valeurs
que peuvent prendre les variables de décision. Existe-t-il
également des restrictions ou exigences minimales sur les variables de
décision (contraintes du marché, politique de l'entreprise,...).
À chaque restriction, limitation ou exigences, correspond habituellement
une contrainte qui prendra la forme d'une équation. L'en-semble des
contraintes ainsi formulées constitue le domaine des solutions possibles
au modèle.
Définition
Un problème de programmation linéaire (P) est
un problème d'optimisation où la fonction objectif à
plusieurs variables et les contraintes sont toutes linéaires. Sa forme
générale est la suivante :
?
?
?
(P)
Z(max) = C.x . . . (1) A.x =
b ...(2)
x = 0 ...(3)
avec:
A : m × n - matrices des
contraintes. b : vecteur colonne (second membre). e : vecteur
ligne (vecteur des coûts). x : vecteur colonne.
(P) est appelé un programme linéaire.
On note D(P) le domaine formé par (2) et (3).
Donc, un programme linéaire a pour but de
résoudre un problème d'optimisation dans lequel:
· Les contraintes (2) e (3) délimitent dans un
espace de n dimensions (le nombre de variables), s'ils sont compatibles, un
hyper volume convexe dont à l'intérieur on peut trouver le (ou
les) point(s) qui satisfai(en)t la fonction objectif (1).
3.4.2 Programmation linéaire en nombres entiers
(PLNE)
Le terme programmation linéaire suppose que les
solutions à trouver doivent être représentées en
variables réelles. S'il est nécessaire d'utiliser des variables
discrètes dans la modélisation du problème, on parle alors
de programmation linéaire en nombres entiers (PLNE). Il est important de
savoir que ces derniers sont nettement plus difficiles à résoudre
que les PL à variables continues.
Chapitre 3.Les outils de modélisation et les
méthodes de résolution
Définition
Etant donné une matrice A d'ordre (m x
n), un vecteur colonne b et un vecteur ligne c, on appelle un
programme linéaire en nombres entiers le problème suivant:
(PLNE)
|
?
?
?
|
Z(max) = C.x
A.x < b
x E N j = 1,2,..,n
|
|
30
Dans le cas où les variables x E {0,
1} , on dit un programme linéaire en variable bivalentes.
3.5 Conclusion
A Chaque problématique est associée une
modélisation et pour chaque modélisation il existe une ou
plusieurs approches de résolution appropriées. Nous venons de
voir dans ce chapitre les techniques de modélisation et de
résolution par le diagramme de GANTT, l'approche de la théorie
des graphes et l'approche de la programmation linéaire.
31
Chapitre4
Modélisation du problème posé
4.1 Introduction
Parmi les outils de modélisation étudiés
dans le chapitre précèdent et compte tenu des informations
recueillies au sein de l'entreprise, la meilleure méthode de
modélisation de la problématique est la programmation
linéaire.
Nous présentons dans ce chapitre, en premier lieu, la
problématique, ensuite le modèle associé au
problème déduit à partir de l'application d' outils et
techniques mathématiques.
4.2 Problématique
Toute entreprise en général a besoin d'un plan
pour organiser et structurer son travail ainsi qu'a veiller à sa bonne
réalisation. Ceux qui est le cas de Sonatarch.
En effet, la Sonatrach possède un systéme
intégré de planification et de gestion de la performance qui est
un outil qui contribue à son pilotage stratégique. C'est au sein
de ce système que se définit la méthodologie
d'élaboration de la stratégie et de la planification à
long terme, le choix des indicateurs clé de performance à mettre
en place et la définition des cibles, puis la planification des
prévisions à court terme. C'est aussi dans ce système que
se fait le suivi des réalisations et la préparation des
informations fournies au top management et nécessaires à la prise
de décision pour l'amélioration des performances.
Ce système se compose de 7 processus suivants :
- Planification long terme,
- Stratégie Court et long terme,
- Fixation des objectifs annuels,
- Planification à court et Moyen terme,
32
Chapitre 4.Modélisation du problème
posé
- Suivi des réalisations annuelles,
- Suivi des performances annuelles
- Analyse des écarts et plan d'actions
d'amélioration.
Le système s'illustre comme ceci:
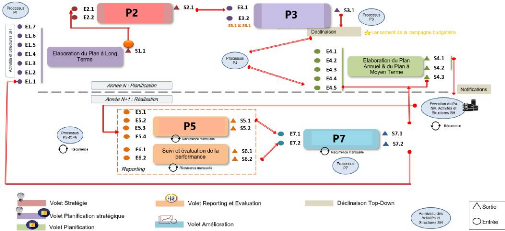
FIGURE 4.1 - Le Macro-processus du
système de planification et de gestion de la performance
La durée de ce système, élaboré
par la Direction SPE, vise à ne pas dépasser 2 années (730
jours), 1 année pour la planification et 1 année pour la
réalisation. Or lors de son exécution, le processus prend plus
que prévu par la norme (3 mois de retard).
Comme il s'agit d'un processus à visée
décisionnelle, les délais revêtent une importance capitale.
Un besoin existe pour optimiser au maximum le délai total de traitement.
L'interpretation du problème consiste donc à minimiser la
durée de ce système.
L'objectif de ce chapitre consiste alors à
élaborer un modèle mathématique adéquat pour
établir un ordonnancement optimal des tâches à
exécuter dans le plan afin d'optimiser sur le temps.
33
Chapitre 4.Modélisation du problème
posé
4.3 Formulation mathématique
Avant d'entamer la modélisation, nous allons d'abord
présenter l'ensemble des outils pris en considération durant
notre présente étude.
4.3.1 Les hypothèses
· Le système se compose de sept (7) processus qui
sont liés entre eux.
· Chaque processus contient un ensemble de tâches.
· Une tâche peut contenir des sous - tâches
élémentaires.
· Une tâche peut commencer avant que la tâche
précédente ne soit terminée.
· Chaque tâche a une durée connue avec
certitude.
· Les tâches sont liées entre elles par des
relations d'antériorité.
· Il existe des temps d'attente entre certaines
tâches.
· Certaines tâches possèdent des dates de
début et de fin imposées par l'orga-nisme.
4.3.2 Les indices
· i : indice tâche i = 1, ..., N
· j : indice tâche j = 1, ...,
N
4.3.3 Les notations
· N : le nombre de
tâches,
· d : la durée de réalisation de la
tâche i,
· fi : la date à ne pas depasser de la
tâche i,
· l : la date de début obligatoire de la tâche
i.
· e : intervalle d'attente entre les tâches i et
j.
4.3.4 Les paramètres
{ 1 si la tâche i se fait après la tâche j
R j = 0 sinon
4.3.5 Les variables de décision
Ci = Le jour du commencement de la tâche i.
tmax = La durée totale du système.
34
Chapitre 4.Modélisation du problème
posé
4.3.6 La fonction objectif
La fonction objectif consiste à minimiser
tmax qui représente la durée totale du
système.
minZ = tmax
4.3.7 Les contraintes
· La durée totale du système doit
être supérieure ou égale à la date fin de la
tâche i.
tmax > Ci + di `d i =
1...N (1)
· Si la tâche j précède la
tâche i, la tâche i ne peut commencer que lorsque
la tâche j et son intervalle d'attente soit terminée.
(2)
(3)
(4)
Rij.Ci > Rij.(Cj
+ dj + ej) ` di,j = 1...N
· La tâche i ne doit pas dépasser une
date précise.
Ci + di < fi `d i =
1...N
· La tâche i doit commencer à une
date précise.
Ci > li ` di = 1...N
Ci E N `di = 1...N (5)
ei E Z `di = 1...N (6)
tmax E N (7)
Chapitre 4.Modélisation du problème
posé
|
(P)
|
?
????????????????????? ?
??????????????????????
|
4.3.8 Le modèle mathématique
minZ = tmax
tmax ~ Ci + di Vi = 1...N
Rij.Ci = Rij.(Cj + dj
+ ej) Vi,j = 1...N
Ci + di = fi Vi = 1...N
Ci ~ li Vi = 1...N
Ci E N Vi = 1...N
ei E Z Vi = 1...N
tmax E N
4.3.9 Type du modèle
La modélisation du problème nous a fourni un
programme mathémathéque linéaire en nombres entiers
mono-objectif.
4.3.10 Taille du modèle
Cette étape est très importante car elle permet
de connaitre la taille et de s'orien-ter vers une méthode de
résolution adéquate.
Nombre de variables
Le tableau suivant montre le nombre de variables associées
à notre modèle:
|
Variables
|
Nombre de variables
|
|
C
|
Nbrtaches
|
|
tmax
|
1
|
TABLE 4.1 - Tableau représentatif du
nombre de variables Nous obtenons au total: Nbrvariables =
Nbrtaches + 1 variables
35
36
Chapitre 4.Modélisation du problème
posé
Nombre de contraintes
Le tableau suivant montre le nombre de contraintes
associés à notre modèle:
|
Type de contrainte
|
Nombre de contraintes
|
(1)
|
Nbrtaches
|
(2)
|
Nbrtaches * Nbrtaches
|
(3)
|
Nbrtaches
|
(4)
|
Nbrtaches
|
(5)
|
Nbrtaches
|
(6)
|
Nbrtaches
|
(7)
|
|
1
|
|
TABLE 4.2 - Tableau représentatif du nombre de
contraintes
Nous obtenons au total : Nbrcontraintes = 5 *
Nbrtaches + Nbrtaches * Nbrtaches + 1
contraintes.
4.4 Méthodes de résolution des PL
4.4.1 Les Méthodes exactes
Les méthodes de résolution exactes sont
nombreuses et se caractérisent par le fait qu'elle permettent d'obtenir
une ou plusieurs solutions. Elles se basent généralement sur une
recherche complète de l'espace des combinaisons afin de trouver une
solution optimale. Ces dernières sont souvent lentes et ne
résolvent que des problèmes dont l'espace de recherche est petit.
Tels que la programmation dynamique, séparation et évaluation,
ect.
La programmation dynamique
La programation dynamique est une méthode
d'optimisation qui a pour objet d'aider à prendre des décision
séquentielles indépendantes les unes des autres. Le concept a
été introduit au début des années 1950 par Richard
Belleman. À l'époque, le terme "programmation" signifie
planification et ordonnacement, elle consiste à résoudre un
problème en le décomposant en sous-problème, puis à
résoudre les sous-problème des plus petits aux plus grands en
stockant toujours les résultats intermiédiaires.[9]
37
Chapitre 4.Modélisation du problème
posé
La Méthode par séparation et évaluation
(Branch and Bound)
L'algorithme de séparation et évaluations, plus
connu sous son appellation anglaise Branch and Bound (B&B) est une
méthode exacte, appartient à la famille de recherche arborescente
qui est utilisée pour la résolution des programmes
mathématiques (P). Le principe de cette méthode consiste à
faire une énumération des solutions admissibles en gardant pour
objectif de ne pas développer tout l'arbre de recherche en "coupant" des
branches à l'aide de bornes. Le Branch-and-Bound est composé de
deux étapes : évaluation et séparation. [10]
· La séparation: cette phase consiste à
diviser le problème initial en plusieurs sous-problèmes qui ont
chacun un ensemble de solutions réalisables, en résolvant tous
les sous-problèmes et en gardant la meilleure solution on assure la
résolution de notre problème initial. L'ensemble de solutions
construit une hiérarchie en arbre souvent appelée arbre de
décision.
· L'évaluation : l'évaluation d'un noeud
de l'arbre de décision a pour but de déterminer l'optimum de
l'ensemble des solutions réalisables associés au noeud en
question ou bien le contraire, c'est à dire de prouver
mathématiquement que cet ensemble ne contient pas de solution optimale
pour la résolution du problème.
4.4.2 Les Méthodes approchées
Les méthodes de résolution approchées
sont connues sous le nom d'heuristiques ou de méta-heuristiques. Elles
ont pour but de trouver une solution admissible en un temps raisonnable, mais
sans garantir l'optimalité de cette solution. Ces méthodes sont
utilisées pour résoudre des problèmes de grandes tailles
en temps de calcul acceptable.
Les heuristiques
Une heuristique est un algorithme de résolution qui
fournit une solution réalisable mais pas nécessairement optimale,
pour un problème d'optimisation combinatoire. La différence entre
les méthodes heuristiques et les méthodes algorithmiques est que
ces derniers ne nous assurent pas qu'on va arriver à un résultat
en un nombre fini d'étapes.
38
Chapitre 4.Modélisation du problème
posé
Les méthodes heuristiques se divisent en deux:
· Les heuristiques de constructions : le principe est la
construction progressif d'une solution initiale par une suite d'instruction
gloutonne en démarrant de rien. Exemple : plus proche voisin,
heuristique d'insertion.
· Les heuristiques de d'amélioration : contrairement
aux heuristiques de constructions, les heuristiques d'améliorations
démarrent d'une solution réalisable puis l'améliorer de
proche en proche. Exemple : transformation admissible, méthode de
descente.
Les Méta-heuristiques
Une Méta-heuristique peut être définie
comme une méthode algorithmique qui a pour stratégie de
dévier et orienter le processus de recherche dans un espace de solution
(souvent très grand) vers des régions riches en solutions
optimales dans le but de s'approcher de cette dernière afin de
déterminer des solution (presque) optimales en un temps raisonnable.
Parmi les méta-heuristiques les plus utilisées,
nous trouvons :
· Recuit simulé,
· Recherche tabou,
· Algorithme génétiques,
· Algorithme de colonies de fourmis.
L'organigramme suivant résume quelques méthodes de
résolutions:
Méthodes de résolution

|
Méthodes exactes
|
Méthodes approchées
|
|
Séparation et évaluation
|
Programmation dynamique
|
Heuristiques
|
Méta-heuristiques
|
FIGURE 4.2 - Organigramme récapitulatif
des méthodes de résolutions
Chapitre 4.Modélisation du problème
posé
4.5 La modélisation avec solveur CPLEX
4.5.1 Présentation du solveur CPLEX
CPLEX est un outil informatique d'optimisation
commercialisé par IBM depuis son acquisition de l'entreprise
française ILOG en 2009. Son nom fait référence au langage
C et à l'algorithme du simplexe. Il est composé d'un
exécutable (CPLEX interactif) et d'une bibliothèque de fonctions
pouvant s'interfacer avec différents langages de programmation: C, C++,
Java et Python.[20]
CPLEX Optimizer fournit des solveurs de programmation
mathématique flexibles et hautes performances pour les problèmes
de programmation linéaire, de programmation mixte en nombres entiers, de
programmation par contraintes et de programmation à contraintes
quadratiques. Ces solveurs incluent un algorithme parallèle
distribué pour la programmation mixte en nombres entiers afin de tirer
parti de plusieurs ordinateurs pour résoudre des problèmes
difficiles.[21]
4.5.2 Le modèle en CPLEX
La résolution d'un modèle mathématique de
programmation linéaire (petite taille) se fait en utilisant plusieurs
méthodes, la plus connue est l'algorithme du Simplex qui a
été utilisé dans plusieurs domaines. La figure suivante
représente le modèle sous CPLEX :
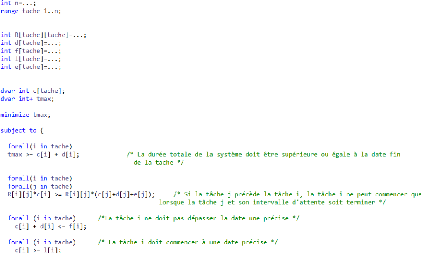
39
FIGURE 4.3 - Modélisation du
problème sous CPLEX
40
Chapitre 4.Modélisation du problème
posé
4.6 Conclusion
La formulation d'un problème est une tâche
délicate mais essentielle car elle conditionne la découverte de
la bonne solution. Pour la première approche, il s'agit d'un
problème linéaire à variables mixtes. Les problèmes
d'ordonnancement sont des problèmes NP-difficiles [1],
c'est-à-dire que dans le cas pratique, la complexité croît
exponentiellement avec le nombre de tâches et de ressources. Toutefois,
dans certains cas pratiques selon la taille du modèle, la
résolution peut se faire à l'aide d'un solveur, nous allons voir
si ce dernier nous fournit une solution en une durée de temps
acceptable.
41
Chapitre5
Résolution du problème et
implémentation
5.1 Introduction
Afin de résoudre notre problème, nous devons
connaître les processus des composants du système qui sont
liés entre eux, la durée de réalisation de chacune d'elle,
les relations d'antériorité entre les tâches et les temps
d'attente ainsi que les dates de début et fin imposées par
l'organisme pour certaines tâches.
Ensuite, nous allons présenter PlanningAPP,
l'application qu'on a conçue pour la réalisation de notre
problème, nous implémenterons les données fournies par SPE
dans celle ci.
5.2 Présentation de MATLAB
Le nom MATLAB vient de l'anglais MATrix LABoratory. Le
logiciel Matlab est un logiciel de manipulation de données
numériques et de programmation dont le champ d'application est
essentiellement les sciences appliquées. Son objectif, par rapport aux
autres langages, est de simplifier au maximum la transcription en langage
informatique d'un problème mathématique en utilisant une
écriture la plus proche possible du langage naturel scientifique.
Il permet de réaliser des simulations numériques
basées sur des algorithmes d'ana-lyse numérique. Il peut donc
être utilisé pour la résolution approchée
d'équations différentielles, d'équations aux
dérivées partielles ou de systèmes non linéaires,
etc...
MATLAB a été développé par la
société The MathWorks, MATLAB permet de manipuler des matrices,
d'afficher des courbes et des données, de mettre en oeuvre des
algorithmes, de créer des interfaces utilisateurs, et peut s'interfacer
avec d'autres langages comme le C, C++, Java, et Fortran. Les utilisateurs de
MATLAB sont de milieux très différents comme l'ingénierie,
les sciences et l'économie dans un contexte
42
Chapitre 5.Résolution du problème et
implémentation
aussi bien industriel que pour la recherche. L'approche
matricielle de MATLAB permet de traiter les données sans aucune
limitation de taille et de réaliser des calculs numériques et
symboliques de façon fiable et rapide.[22]
5.2.1 Pourquoi opter pour MATLAB?
Le choix s'est porté sur l'emploi du langage du logiciel
Matlab 9.0.0.341360 (R2016a), car il répond aux critères
suivants:
- La maniabilité du langage : constitué d'un
ensemble de possibilités faisant en sorte que le programmeur travaille
avec aisance, assuré d'une part par la syntaxe du langage et d'autre
part par un aspect visuel clair représentatif à la fois du
détail et du global.
- Le bagage du langage : il contient une interface graphique
puissante ainsi
qu'une grande variété de méthodes
scientifiques implémentées (prédéfinies). - MATLAB
possède une programmation facile, une continuité parmi les
valeurs
entières, réelles et complexes.
- Une bibliothèque mathématique très
compréhensive avec l'outil graphique qui inclut les fonctions
d'interface graphique et les utilitaires.
- la possibilité de liaison avec les autres langages
classiques de programmations.[12]
5.3 Collecte des données
5.3.1 Décomposition du système
Après l'étude du système de planification et
de gestion de la performance, nous pouvons le décomposer en 57
tâches.
Pour des raisons de confidentialité, nous
ne pouvons désigner les actions des tâches, nous les
représenterons qu'avec leur codes d'action.
Chapitre 5.Résolution du problème et
implémentation
|
Processus
|
Tâches
|
Sous-tâches
|
|
P1.1
|
|
|
P1.2
|
|
|
P1.3
|
|
|
P1.4
|
|
|
P1
|
|
|
P1.5
|
|
P1.6
|
|
|
P1.7
|
|
|
P1.8
|
|
|
P2.1
|
|
|
P2.2
|
|
|
P2.3
|
|
|
P2.4
|
|
|
P2
|
|
|
P2.5
|
|
|
P3.1.1
|
|
|
P3.1.2
|
|
|
P3.1.3
|
|
|
P3.1.4
|
|
P3.1
|
|
P3.1.5
|
|
|
P3.1.6
|
|
P3
|
|
|
P3.1.7
|
|
|
P3.1.8
|
|
|
P3.2.1
|
|
P3.2
|
P3.2.2
|
|
|
P3.2.3
|
|
P3.3
|
|
|
P4.
|
|
|
|
P4.1.1
|
|
P4.1
|
P4.1.2
|
|
|
P4.1.3
|
|
|
P4.2.1
|
|
|
P4.2.2
|
|
|
P4.2.3
|
|
P4.2
|
P4.2.4
|
|
|
P4.2.5
|
|
|
P4.2.6
|
|
|
P4.2.7
|
|
P4
|
|
P4.3
|
|
|
p4.4
|
|
|
p4.5
|
|
|
|
P4.6.1
|
|
|
P4.6.2
|
|
|
P4.6.3
|
|
P4.6
|
P4.6.4
|
|
|
P4.6.5
|
|
|
P4.6.6
|
|
|
P4.6.7
|
|
|
P4.6.8
|
|
P5.1
|
|
|
P5.2
|
|
|
P5
|
|
|
P5.3
|
|
P5.4
|
|
|
P6.1
|
|
|
P6
|
P6.2
|
|
|
P6.3
|
|
|
P7.1
|
|
|
P7
|
P7.2
|
|
|
P7.3
|
|
43
TABLE 5.1 - Tableau récapitulatif des tâches du
système de planification et de gestion de la
performance.
Chapitre 5.Résolution du problème et
implémentation
5.3.2 Détermination de la durée des
tâches
Le tableau suivant exhibe les tâches du système avec
leurs durées, contraintes et temps d'attente.
|
Tâches
|
Durées
|
Contraintes
|
Attente
|
|
P1.1
|
1
|
Débute le 01/06
|
|
|
P1.2
|
3
|
D-F
|
|
|
P1.3
|
60
|
D-F
|
|
|
P1.4
|
30
|
Paralléle
|
-30
|
|
P1.5
|
30
|
|
|
P1.6
|
7
|
D-F/auplustard31/01
|
5
|
|
P1.7
|
1
|
D-F
|
|
|
P1.8
|
2
|
Eventuellement
|
|
|
P2.1
|
20
|
D-F
|
3
|
|
P2.2
|
10
|
D-F
|
|
|
P2.3
|
10
|
D-F
|
|
|
P2.4
|
5
|
D-F
|
3
|
|
P2.5
|
10
|
D-F
|
|
|
P3.1.1
|
15
|
Après P2 / au plus tard 15/03
|
5
|
|
P3.1.2
|
5
|
D-F
|
5
|
|
P3.1.3
|
5
|
D-F
|
|
|
P3.1.4
|
3
|
D-F
|
|
|
P3.1.5
|
10
|
D-F
|
|
|
P3.1.6
|
10
|
D-F
|
7
|
|
P3.1.7
|
7
|
D-F
|
|
|
P3.1.8
|
5
|
Eventuellement
|
|
|
P3.2.1
|
30
|
Débute après P3.1
|
8
|
|
P3.2.2
|
20
|
D-F
|
8
|
|
P3.2.3
|
1
|
D-F
|
|
|
P3.3
|
129
|
Débute avec P4
|
|
|
P4.
|
90
|
Après P3.1
|
-54
|
|
P4.1.1
|
15
|
D-F
|
7
|
|
P4.1.2
|
20
|
D-F
|
7
|
|
P4.1.3
|
5
|
D-F
|
3
|
|
P4.2.1
|
30
|
D-F
|
7
|
|
P4.2.2
|
15
|
D-F
|
7
|
|
P4.2.3
|
8
|
D-F
|
|
|
P4.2.4
|
45
|
D-F
|
7
|
|
P4.2.5
|
12
|
D-F
|
7
|
|
P4.2.6
|
22
|
D-F
|
|
|
P4.2.7
|
15
|
D-F
|
|
|
P4.3
|
15
|
au plus tard 31/12
|
|
|
p4.4
|
20
|
D-F
|
|
|
p4.5
|
15
|
D-F
|
|
|
P4.6.1
|
5
|
D-F
|
7
|
|
P4.6.2
|
2
|
D-F
|
|
|
P4.6.3
|
5
|
D-F
|
|
|
P4.6.4
|
5
|
D-F
|
|
|
P4.6.5
|
1
|
D-F
|
|
|
P4.6.6
|
5
|
D-F
|
|
|
P4.6.7
|
5
|
D-F
|
|
|
P4.6.8
|
1
|
D-F
|
|
|
P5.1
|
10
|
D-F
|
|
|
P5.2
|
10
|
D-F
|
5
|
|
P5.3
|
1
|
D-F
|
|
|
P5.4
|
38
|
D-F
|
|
|
P6.1
|
15
|
Débute avec P5
|
5
|
|
P6.2
|
15
|
D-F
|
5
|
|
P6.3
|
10
|
D-F
|
7
|
|
P7.1
|
15
|
D-F
|
7
|
|
P7.2
|
15
|
D-F
|
7
|
|
P7.3
|
1
|
D-F
|
|
44
TABLE 5.2 - Tableau récapitulatif des durées,
contraintes et temps d'attente des tâches du système.
D-F : Relation Début - Fin avec la tâche
précédente.
Le système se fait actuellement en 821 jours (3 mois de
retards).
45
Chapitre 5.Résolution du problème et
implémentation
5.4 Implémentation du problème
5.4.1 Présentation d'App Designer
App Designer permet de créer des applications
professionnelles, il fournit un environnement de développement
interactif permettant de concevoir la mise en page d'une application et de
programmer son comportement. Il fournit une version entièrement
intégrée de l'éditeur MATLAB et un vaste ensemble de
composants d'in-terface utilisateur interactifs. Il offre également un
gestionnaire de grille pour organiser une interface utilisateur et des options
de reflux automatique pour que l'ap-plication détecte et réponde
aux changements de taille de l'écran. Il vous permet de distribuer des
applications en les empaquetant dans des fichiers d'installation directement
à partir de la barre d'outils de l'App Designer, ou en créant une
application de bureau ou web autonome (nécessite MATLAB CompilerTM).
[23]

FIGURE 5.1 - La bibliothèque de
composants d'App Designer
5.4.2 Présentation de l'application
L'application "PlanningAPP" est destinée à
établir un ordonnancement des tâches du système de
planification et de gestion de la performance. En effet, après avoir
saisi les données requises, elle permettra à l'utilisateur
d'avoir les dates de début et fin de chaque tâche du
système, ainsi que la durée totale optimisée de ce
dernier.
46
Chapitre 5.Résolution du problème et
implémentation
5.4.3 Fonctionnement de PlanningAPP
Lors du lancement de l'application, la fenêtre ci-dessous
apparaitra, elle contient deux champs à remplir ainsi que deux
boutons:
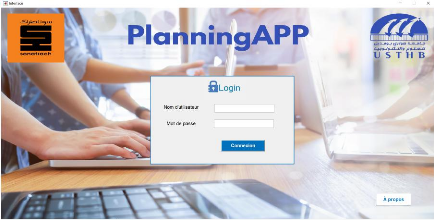
FIGURE 5.2 - Identification
-- Les champs d'authentification : la connexion à
l'application se fait par la saisie d'un nom d'utilisateur et un mot de passe
définit par défaut (nom d'uti-lisateur: admin, mot de passe :
ROMARIN)
-- Bouton Connexion : permet d'accéder aux
fonctionnalités de l'application une fois le nom d'utilisateur et le mot
de passe correct sont insérés, si ces derniers sont incorrects,
un message d'erreur s'affichera.
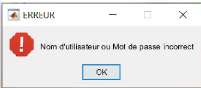
FIGURE 5.3 - Message d'erreur
-- Bouton À propos : le bouton À
propos sert à afficher les informations essentielles
sur les concepteurs de l'application.
47
Chapitre 5.Résolution du problème et
implémentation
FIGURE 5.4 - Bouton À propos
Une fois connecté dans l'application, voici la
fenêtre qui apparaitra :

FIGURE 5.5 - Fenêtre d'accueil
-- Fenêtre Importer un document Excel : cette
fenêtre contient un bouton «...» qui permet d'importer un
document Excel contenant la matrice de prédécesseurs, la
durée, la date limite à ne pas dépasser,la date de
début obligatoire pour chaque tâche ainsi que l'intervalle
d'attente entre les tâches.
48
Chapitre 5.Résolution du problème et
implémentation
FIGURE 5.6 - Bouton «...»
FIGURE 5.7 - Fichier Excel importé
Le bouton Aide explique à l'utilisateur comment
préparer son fichier Excel pour ne pas y avoir d'erreurs lors du
traitement de données.
49
Chapitre 5.Résolution du problème et
implémentation
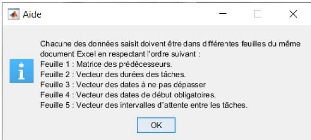
FIGURE 5.8 - Bouton Aide
Une fois le document Excel, contenant les données, a
été choisi, l'utilisateur cliquera sur le bouton
Résultats.
5.4.4 Présentation du résultat et
commentaires
Après implémentation des données de SPE, le
résultat final sera présenté analytiquement sur un tableau
comme nous le montre la figure suivante:
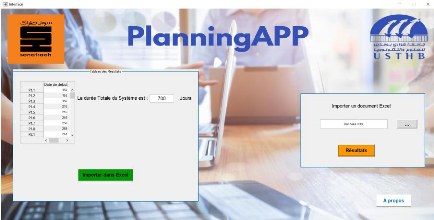
FIGURE 5.9 - Tableau résultats
En cliquant sur : Importer dans Excel, l'application affichera
les résultats dans Excel sous forme de tableau avec les dates de
début, durées, dates de fin et une solution graphique avec le
diagramme de GANTT, comme nous le montre les figures suivantes:
Chapitre 5.Résolution du problème et
implémentation
La durée Totale du Syatè me eut 700
loura
04/05/2021 12/08/2021 20/11/2021 20/02/2022 08/06/2022 16/09/2022
25/12/2022 04/04/2023 13/07/2023
P13 P15 P1.7 P2.1 P22 P25 P3.1.2
P3.1.8
P33 P4.1.1 P0.1.3 P42.2 P4.2.4 P0.2.6 P43 P4.5 P4 fi.2 P46.4
P46.6 P4 fi.8 P5.2 P5A 2.6.2 P7.1 P73
Dare de début
·Durée
Itl
riches Date de début Durée Date de fin
|
P1.1
|
01/06/2021
|
1
|
02/05/2021
|
|
P1.2
|
12/0612021
|
3
|
05/06/2021
|
|
P1.3
|
05/0612021
|
60
|
04/08/2021
|
|
P1.4
|
D4/08/2021
|
3D
|
03/09/2021
|
|
P1.5
|
D4/08/2021
|
3D
|
03/09/2021
|
|
P1.6
|
03/09/2021
|
7
|
10/09/2021
|
|
P1.7
|
15/09/2021
|
1
|
15/09/2021
|
|
P1.8
|
16/09/2021
|
2
|
10/09/2021
|
|
P2.1
|
18/09/2021
|
20
|
08/10/2021
|
|
P2.2
|
11/10/2021
|
10
|
21/10/2021
|
|
P2.3
|
21/10/2021
|
10
|
31/10/2021
|
|
P2.4
|
31/10/2021
|
5
|
05/11/2021
|
|
P2.5
|
D8/11/2021
|
10
|
18/11/2021
|
|
P3.1.1
|
18/11/2021
|
15
|
03/12/2021
|
|
P3.1.2
|
58/12/20215
|
|
13/12/2021
|
|
P3.1.3
|
18/12/20215
|
|
23/12/2021
|
|
P3.1.4
|
23/12/20213
|
|
25/12/2021
|
|
P3.1.5
|
26/12/2021
|
10
|
05/01/2022
|
|
P3.1.6
|
D5/01/2022
|
10
|
15/01/2022
|
|
P3.1.7
|
22/01/20227
|
|
29/01/2022
|
|
P3.1.8
|
29/01/20225
|
|
03/02/2022
|
|
P3.2.1
|
03/02/2022
|
30
|
05/03/2022
|
|
P3.2.2
|
13/03/2022
|
20
|
02/04/2022
|
|
P3.2.3
|
53/05/20221
|
|
04/05/2022
|
|
P3.3
|
D4/05/2022
|
129
|
10/09/2022
|
|
P4.
|
03/02/2022
|
90
|
04/05/2022
|
|
P4.1.1
|
11/03/2022
|
15
|
26/03/2022
|
|
P4.1.2
|
02/04/2022
|
20
|
22/04/2022
|
|
P4.1.3
|
29/04/20225
|
|
04/05/2022
|
|
P4.2.1
|
04/05/2022
|
30
|
03/06/2022
|
10106{2072 15 25/06/2027
Solution Feuill 0
50
FIGURE 5.10 - Résultats sous Excel
|
Tâches
|
Date de début
|
Durée
|
Date de fin
|
|
P1.1
|
01/05/2021
|
1
|
02/06/2021
|
|
P1.2
|
02/05/2021
|
3
|
05/06/2021
|
|
P1.3
|
05/06/2021
|
60
|
04/08/2021
|
|
P1.4
|
04/08/2021
|
30
|
03/09/2021
|
|
P1.5
|
04/08/2021
|
30
|
03/09/2021
|
|
P1.6
|
03/09/2021
|
7
|
10/09/2021
|
|
P1.7
|
15/09/2021
|
1
|
16/09/2021
|
|
P1.8
|
16/09/2021
|
2
|
18/09/2021
|
|
P2.1
|
18/09/2021
|
20
|
08/10/2021
|
|
P2.2
|
11/10/2021
|
10
|
21/10/2021
|
|
P2.3
|
21/10/2021
|
10
|
31/10/2021
|
|
P2.4
|
31/10/2021
|
5
|
05/11/2021
|
|
P2.5
|
08/11/2021
|
10
|
18/11/2021
|
|
P3.1.1
|
18/11/2021
|
15
|
03/12/2021
|
|
P3.1.2
|
08/12/2021
|
5
|
13/12/2021
|
|
P3.1.3
|
18/12/2021
|
5
|
23/12/2021
|
|
P3.1.4
|
23/12/2021
|
3
|
26/12/2021
|
|
P3.1.5
|
26/12/2021
|
10
|
05/01/2022
|
|
P3.1.6
|
05/01/2022
|
10
|
15/01/2022
|
|
P3.1.7
|
22/01/2022
|
7
|
29/01/2022
|
|
P3.1.8
|
29/01/2022
|
5
|
03/02/2022
|
|
P3.2.1
|
03/02/2022
|
30
|
05/03/2022
|
|
P3.2.2
|
13/03/2022
|
20
|
02/04/2022
|
|
P3.2.3
|
03/05/2022
|
1
|
04/05/2022
|
|
P3.3
|
04/05/2022
|
129
|
10/09/2022
|
|
P4.
|
03/02/2022
|
90
|
04/05/2022
|
|
P4.1.1
|
11/03/2022
|
15
|
26/03/2022
|
|
P4.1.2
|
02/04/2022
|
20
|
22/04/2022
|
|
P4.1.3
|
29/04/2022
|
5
|
04/05/2022
|
|
P4.2.1
|
04/05/2022
|
30
|
03/06/2022
|
|
P4.2.2
|
10/06/2022
|
15
|
25/06/2022
|
FIGURE 5.11 - Tableau résultats 1
Chapitre 5.Résolution du problème et
implémentation
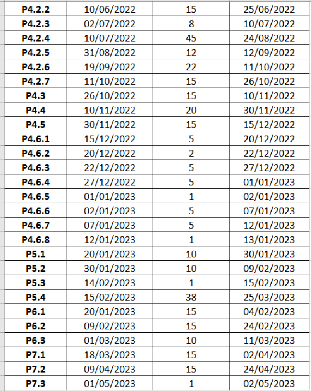
FIGURE 5.12 - Tableau résultats 2

51
FIGURE 5.13 - La durée totale du système
52
Chapitre 5.Résolution du problème et
implémentation
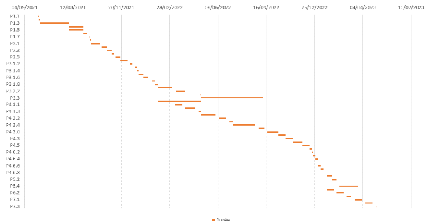
FIGURE 5.14 - Solution graphique avec diagramme de GANTT
Discussion des résultats
D'après les données de SPE, le système se
faisait en 821 jours . Il enregistrait un retard de 91 jours
(soit environs 3 mois) par rappport à la date limite qui est de 730
jours . Le résultat obtenu en faisant appel aux fonctions du solveur
CPLEX, qui est une méthode exacte, nous donne une solution optimale de :
700 jours.
Ce résultat diminue la durée totale du
système de planification et de gestion de la performance d'environs 15%
soit 121 jours. Il élimine, d'un coté, le retard
enregistré et de l'autre coté, il dégage un gain
appréciable en matière de temps par rapport à la date
limite et par voie de consequence un gain en matière de coût et
performance.
5.5 Conclusion
Dans ce dernier chapitre, nous avons abordé
l'implémentation des données de SPE dans notre PlanningAPP.
Nous avons commencé en premier lieu par la
présentation du langage MATLAB et les raisons de son choix. Ensuite,
nous avons présenté les données recueillies au sein de
l'entreprise ainsi que l'application PlanningAPP et enfin, nous avons fait
l'implémentation des données dans notre application et
comparé les résultats trouvés avec ceux de la
SONATRACH.
53
Conclusion générale
Ce mémoire qui s'inscrit dans le domaine de
l'amélioration des performances des entreprises a pour objectif
principal la résolution des problèmes d'ordonnancement avec
l'utilisation des méthodes et techniques de la recherche
opérationnelle.
Le travail qui nous a été confié par
l'entreprise SONATRACH avait pour but essentiel d'apporter les meilleurs
résultats en matière de temps lors de la réalisation d'un
cycle complet dans un système intégré de planification et
de gestion de la performance.
Pour ce faire, notre travail a débuté en premier
lieu par la compréhension du contexte de notre projet et l'influence de
la planification sur la performance de l'en-treprise suivi d'une étude
sur les méthodes d'ordonnancement et les techniques de
modélisation des problèmes d'ordonnancement.
Après avoir pris connaissance des différentes
contraintes intervenant lors de la réalisation du système, nous
avons modélisé notre problème mathématiquement en
gardant pour seul objectif la minimisation du temps.
A ce fait, une application appelée PlanningAPP a
été créée pour la résolution du
problème qui consiste à faire appel à des fonctions du
solveur CPLEX. Cette application permet à l'utilisateur
d'implémenter les données en important un document Excel.
En conclusion, nous pouvons dire que notre objectif
assigné au début de notre travail a été atteint car
nous avons pu minimiser les délais de la réalisation d'un cycle
complet dans un système intégré de planification et de
gestion de la performance.
54
Cependant, d'autres perspectives et développements
pourraient être inscrits pour une meilleure appréciation de
l'application à citer, à titre d'exemple:
-- Ajouter la contrainte des ressources humaines, -- Ajouter la
contrainte de ressources financières.
Pour finir, ce projet nous a permis d'acquérir une
très bonne expérience professionnelle dans notre domaine et nous
espérons que ce résultat sera bénéfique pour
l'entreprise.
55
Bibliographie
[1] J.CARLIER et P.CHRETIENNE : Problèmes
d'ordonnacement, modélisa-tion,complexité,algorithmes, MASSON,
ISBN 2-225-81275-6.
[2] P.LOPEZ Approche par contraintes de problèmes
d'ordonnancement et d'af-fectation: structures temporelles et mécanismes
de propagation, Thèse d'ha-bilitation à diriger des recherches,
Institut polytechnique de Toulouse, 2003.
[3] BELHARRAT.N et Collectif ,«La recherche
Opérationnelle,(théorie des graphes) », ALGERIE,Livre la
pages blue, 2005.
[4] A. YEZZA. Que signifient AON et AOA?, thèse Doctorat,
avril 2011 / mise à jour oct 2012.
[5] E. SAULE, P-F. DUTOT et G. MOUNIE : Scheduling With Storage
Constraints. In Electronic proceedings of IPDPS 2008, Miami, Florida USA, APR
2008.
[6] E. DEMEULEMEESTER, J.BEEIEN, Operating room planning and
scheduling: literature review, European Journal of Operational Research,
2010.
[7] G. FINK, Recherche opérationnelle et réseaux,
Lavoisier, Paris, 2002.
[8] A. HAIT, C. ARTIGUES, P. BAPPTISTE et M. TREPANIER :
Ordonnancement sous contraintes d'énergie et de ressources humaines. In
: 11ème congrès de la société française de
Génie des Procédés Octobre 2007, Saint-Etienne, France.
[9] BELLMAN, RICHARD, Eye of the Hurricane : An
Autobiography. World Scientific Pub Co Inc, 1984, 344p.
[10] LAND A.H., DOIG A.G., «Econometrica», An
Automatic Method ofSolving Dis-crete Programming Problems, Juillet 1960,
Vol 28, n°3, pp.497-520.
[11] YENDE, RAPHAEL, Cours de methodes de conduite des
projets informatique, 2019. Thèse de doctorat. institut supérieur
de commerce. Page 59.
[12] RADI, BOUCHAÏB et EL HAMI, ABDELKHALEK.
Méthodes numériques avancées sous Matlab® 1 :
Approximation des fonctions et résolutions des systèmes
linéaires. ISTE Group, 2018.
[13] ISSOR, ZINEB. La performance de l'entreprise : un
concept complexe aux multiples dimensions.
Projectics/Proyéctica/Projectique, 2017, no 2, p. 93-103.
56
BIBLIOGRAPHIE
[14] LEBAS. M, « oui, il faut définir la
performance », in revue française de comptabilité,
n°269, juillet, aout, 1995, p. 66.
[15] WEISS.D.K.O, « la fonction RH », Edition
d'organisation, paris, 1988, P. 675.
[16] KHEMAKHEM. A, « la dynamique de contrôle de
gestion », Edition Dunod, Paris, 1992, p. 311.
Webographie
[17]
www.sonatrach.com
[18]
www.sonatrach.com/nos-activites
[19]
www.agrireseau.net
[20]
www.wikipedia.org/wiki/CPLEX
[21]
www.ibm.com/fr-fr/analytics/cplex-optimizer
[22]
www.wikipedia.org/wiki/MATLAB
[23] [
www.mathworks.com/help/matlab/app-designer.html
[24]
www.sabbar.fr/management/la-performance-de-lentreprise/
[25]
www.gantt.com/fr/
[26]
www.wikipedia.org/wiki/PERT
[27]
www.logistiqueconseil.org/Articles/Logistique/Methode-potentiel-metra
[28]
www.hatem.masri.tripod.com/RO/CHAP1html.htm
57
Résumé
Le secteur économique de l'énergie en
Algérie occupe une place Importante dans l'économie du pays. La
compagnie SONATRACH est un groupe entièrement intégré sur
toute la chaîne de valeur des hydrocarbures, possédant plusieurs
directions où la Direction Corporate Stratégie, Planification et
Economie (SPE) ( chargée de l'élaboration et le
développement des plans à moyen et long terme et d'évaluer
leur mise en oeuvre) occupe une place prédominante.
La planification qui est une ligne de base pour toute
amélioration de la performance de l'entreprise, la Direction Corporate
Stratégie, Planification et Economie (SPE) a mis en place un
système intégré de planification et de gestion de la
performance qui contribue fortement à son pilotage stratégique
important en matière de temps.
La problématique posée dans notre projet est la
minimisation des délais de réalisation d'un cycle complet dans un
système intégré de planification et de gestion de la
performance, une étude était nécessaire sur le contexte de
notre projet et l'in-fluence de la planification sur la performance de
l'entreprise afin de connaitre les composantes réelles et comprendre son
mode de fonctionnement.
Dans notre cas, la méthode exacte qui consiste à
faire appel à des fonctions du solveur CPLEX a été
utilisée dans notre mémoire pour la résolution du
problème.
Afin de mettre en évidence notre modèle, en
utilisant le langage MATLAB, nous avons programmé une application
appelée « PlanningAPP » qui permet à l'utilisa-teur
d'implémenter les données en important un document Excel.
| 

