|

UNIVERSITE MOHAMED KHIDER DE BISKRA
FACULTE DES
SCIENCES ET DES SCIENCES DE L'INGENIEUR
DEPARTEMENT
D'ELECTROTECHNIQUE
N° ordre :
Série :
Mémoire
Présenté pour obtenir le diplôme de
Magister nouveau régime en
Electrotechnique
OPTION : Electricité
industrielle
THEME
Estimation des paramètres et des états
de la machine asynchrone en vue du
diagnostic des défauts
rotoriques
par :
Samir MERADI
Soutenu le :
27/06/2007
|
Devant le jury :
|
|
|
|
|
Salah Eddine ZOUZOU
|
Prof.
|
Président
|
Université de Biskra
|
|
Abdelhamid BENAKCHA
|
M.C.
|
Rapporteur
|
Université de Biskra
|
|
Mohammed Saïd NAIT SAID
|
Prof.
|
Examinateur
|
Université de Batna
|
|
Ammar GOLEA
|
M.C.
|
Examinateur
|
Université de Biskra
|
Remerciements
Ce travail a été effectué au sein du
département d'Electrotechnique de l'Université de Biskra sous la
direction de Monsieur Abdelhamid BENAKCHA , Maître de conférences
à l'Université de Biskra ainsi que Monsieur Arezki MENACER
Chargé de cours à l'université de Biskra. Qu'ils trouvent
ici l'expression de toute ma gratitude pour les conseils avisés et
l'encouragement constant qu'ils n'ont cessé de me prodiguer tout au long
de cette étude.
Mes remerciements les plus sincères sont
adressés à Monsieur Salah Eddine ZOUZOU , Professeur à
l'Université de Biskra , pour l'honneur qu'il m'a fait en acceptant la
présidence du jury de ce mémoire.
Mes vifs remerciements vont aussi à Monsieur Mohammed Said
NAIT SAID, Professeur à l'Université de Batna, je suis
très honoré de sa présence dans le jury de ce
mémoire.
J'exprime ma grande gratitude à Monsieur Ammar GOLEA ,
Maître de conférence à l'Université de Biskra, pour
l'intérêt qu'il a porté à ce travail et pour avoir
accepté de participer à ce jury .
Je remercie également Monsieur Said BARKATI chargé
de cours à l'Université de M'Sila et Monsieur Dr.Khelifa
BENMANSOUR, pour leurs collaborations et conseils.
Je ne saurais terminer sans remercier chaleureusement mes amis :
A. Benaissa, M. Rezig, F. Benamor, N. Bouali,
Durant ces deux années , les membres administratifs et
techniques du département et du laboratoire ont toujours su
répondre présent à mes nombreuses sollicitations. J'ai
particulièrement apprécié leur disponibilité, leur
sympathie, et leurs compétences. Qu'ils reçoivent toute ma
gratitude.
Tous ceux qui ont contribué de près ou de loin
à l'élaboration de ce travail, trouvent ici l'expression de ma
très vive reconnaissance.
A ma mère, à la mémoire de mon père
,
A mon épouse , A mes filles Meriem et Khadija ,
A mes frères : Messoud, Salah et Kamel et soeurs : Saliha
et Hayette, Aó tous mes amis, Rachid, Elkier, Kamel, Messoud
, Farouk,
Notations et Symboles
Symbole Unité Définition
T Induction magnétique créée dans
Bsm l'entrefer par le courant statorique
Cem N · m couple électromagnétique
u 0 H. m-1 Perméabilité
magnétique du vide
courants rotoriques de la machine dans I sm le repère
fixe
N s Nombre de spires statoriques par phase
N r Nombre de barres rotoriques
e m Entrefer
Ids , Iqs A Composantes biphasées du courant
statorique direct et en quadrature
m Phase
Ö psm Flux principal
Lsp H Inductance propre statorique
Lsc H inductances cycliques statorique
H mutuelle inductance cyclique entre
Msr stator et rotor
nombre de paires de pôles de la P machine
p opérateur de Laplace
? Résistance totale de l'anneau de court-
Re circuit
Rs ? résistances d'une phase statorique
t s temps
Rbk ? Résistance de la barre k
s constante de temps en boucle fermée de
Ti la régulation du courant stator
Tr s constante de temps rotorique
H Inductance totale de l'anneau de court-
Le circuit
H Mutuelle inductance entre barres
Mrr rotoriques
Vsabc V Les tensions statoriques
Vs d , Vs q V tensions statoriques de la machine
dans
le repère tournant dq
L r c H Inductance cyclique rotorique
Ö rk Wb Flux magnétique crée par une maille
rotorique
Ösabc Wb Les flux statoriques
Örd , Örq Wb flux rotoriques de la machine dans le
repère tournant dq
Wb Flux magnétique par pôle crée par le
Ös courant statorique
Ébk A Courant dans la barre
Érk A Courant dans la boucle
Ö ds , Ö qs Wb flux statoriques de la
machine dans le
repère tournant dq
ó coefficient de dispersion
? rad · s-1 vitesse angulaire de rotation
rad · s-1 vitesse de rotation électrique
de la
ù machine
( ù )ref rad · s-1 vitesse de
référence
ù s , ù r rad · s-1
pulsations des courants stator et rotor
Cr N · m Couple résistant
f N · m · s · rad-1 coefficient de
frottement visqueux
J kg · m-2 inertie des parties tournantes
Kd, Td Coefficients du régulateur du
courant sur l'axe d
KP , KT coefficients d'un correcteur de type
PT
Kq, Tq Coefficients du régulateur du
courant sur l'axe q
Te s Période d'échantillonnage
tr s temps de retard
Angle électrique entre deux mailles
á rotoriques
è position du rotor
ô s constante de temps
ô 1 , ô 2 s
constantes de temps des régulateurs de courant, de
vitesse
ô e s constante de temps électrique
? flux créé par l'excitation
ù rad · s-1 pulsation du réseau
d'alimentation
Introduction générale
Les machines électriques tournantes occupent une place
prépondérante dans tous les secteurs industriels. Les machines
asynchrones triphasées à cage d'écureuil sont les plus
fréquemment utilisées grâce a leur robustesse, leur
simplicité de construction et leur bas coût. Néanmoins,
celles-ci subissent au cours de leur durée de vie un certain nombre de
sollicitations externes ou internes qui peuvent les rendre défaillantes.
Les contraintes industrielles en fiabilité, maintenabilité,
disponibilité et sécurité des équipements sont par
ailleurs très fortes. C'est pourquoi le monde industriel est fortement
intéressé par un ensemble de techniques permettant de
déterminer l'état de santé de ces machines.[1]
Plus généralement, la surveillance et le
diagnostic en génie électrique remettent en cause les concepts et
les outils traditionnels utilisés en conception et commande des machines
électriques tournantes. La modélisation des machines asynchrones
triphasées a cage d'écureuil en vue de la surveillance et du
diagnostic s'insère dans ce contexte. Le présent travail
s'intéresse a la synthèse d'un modèle de connaissance
riche et flexible permettant d'appréhender le comportement des machines
asynchrones triphasées a cage d'écureuil en absence et en
présence de défaillances ainsi que l'estimation des
paramètres et des états de la machine asynchrone en vu de
détection des défauts rotoriques en utilisons le filtre de Kalman
étendu.
.
Ce mémoire sera divisé en six chapitres :
Le premier chapitre permettra d'apporter quelques
éléments de diagnostic des machines asynchrones triphasées
a cage d'écureuil. Le diagnostic consiste a connaître,
évaluer, prévoir, mesurer et maîtriser les
défaillances des systèmes. Apres une description des motivations
de cette nouvelle science de l'ingénieur, on présente les
différents concepts terminologiques et méthodologiques associes.
Suite a ces considérations générales, on est amène
a préciser le système étudie ; on se concentre ici
exclusivement sur les machines asynchrones triphasées a cage
d'écureuil. Puis on a présenté l'état de l'art
concernant les techniques et les différents travaux
réalisés dans le domaine du diagnostic en ligne en vue d'aboutir
à une signature fiable de défauts rotoriques.
Lorsque les méthodes de surveillance et de diagnostic
sont basées sur la génération, la détection et
l'exploitation de signatures analytiques de défaillances, elles
nécessitent l'emploi de modèles de connaissance du système
étudie. En conséquence, on oriente l'étude vers la
modélisation des machines asynchrones triphasées a cage
d'écureuil en vue de la surveillance et du diagnostic. Les objectifs du
modèle devant être synthétise sont alors clairement
spécifies.
Le deuxième chapitre constitue la pierre angulaire du
présent travail. Dans lequel nous avons modélisé la
machine asynchrone à cage d'écureuil en choisissant l'approche
analytique globale basée sur la signature des grandeurs externes telles
que (courant, couple,...etc.), pour cela, nous avons utilisé un
schéma multi enroulement équivalent à la cage qui s'adapte
bien au problème posé et où les équations sont
écrites dans un référentiel lié au rotor, vu que
les défauts envisagés se situent à son niveau.
Puis, nous avons fait la transformation du modèle de
Nr grandeurs au modèle dq équivalent, pour
faciliter sa simulation.
triphasées a cage d'écureuil. Le premier
chapitre a permis d'identifier clairement ces défaillances, leurs causes
et leurs effets. On remarque notamment que les modes de défaillances
rencontrées impliquent majoritairement une altération topologique
des machines asynchrones triphasées a cage d'écureuil sous les
formes suivantes : court-circuit et rupture des conducteurs statoriques,
rupture des conducteurs rotoriques, excentricité statique, dynamique, ou
mixte du rotor par rapport au stator. Ici nous avons présenté les
différents résultats de simulation de la machine avec
défauts;à vide et en charge. Nous avons fait l'analyse spectrale
pour le courant statorique, pour faire révéler les défauts
des cassures des barres, par des harmoniques.
Le quatrième chapitre est consacré à la
présentation de la commande par flux orienté de la machine
asynchrone alimentée en courant en absence et en présence des
défauts au rotor.
Le cinquième chapitre consiste à estimés
et à observer les courants et les résistances rotoriques afin de
détecter les défauts rotoriques, en appliquant l'observateur
à base de modèles paramétriques ; le filtre de Kalman
étendu.
Dans l'approche à base de modèles
paramétriques, on ne génère pas réellement un
vecteur de résidus, mais on estime un vecteur de paramètres dont
la variation à l'extérieur d'une plage de référence
représente l'apparition d'un défaut dans le système
surveillé (ou plus exactement représente un changement dans les
caractéristiques du procédé). Cette variation peut alors
être détectée à l'aide d'un test de décision
dans l'espace paramétrique. [31]
Le dernier chapitre de ce mémoire comporte les concepts
de la logique floue et nous fournirons tous les aspects méthodologiques
nécessaires à la compréhension des systèmes
flous.
Nous verrons comment intégrer cet outil à la
commande des systèmes dynamiques pour en faire un contrôleur dans
le quatrième chapitre. Les étapes de synthèse puis
l'application de la commande floue à la machine asynchrone sont
présentées et nous analyserons aussi les performances de ce type
de contrôle. Ce chapitre explique aussi comment un contrôle flou
peut être réalisé. On y décrit les blocs
fondamentaux ( fuzzification, moteur d'inférence,
défuzzification) et la méthodologie de leur conception.
On dit souvent que la commande floue est plus robuste. Pour
cela on va appliquer le régulateur flou dans la commande vectorielle sur
le modèle réduit de la machine asynchrone, pour voir l'influence
des défauts rotoriques sur cette commande.
Une conclusion générale vient clôturer les
six chapitres de ce mémoire. Une proposition pour les travaux futurs est
également donnée.
Chapitre I
Diagnostic des défauts dans la
machine
asynchrone
I.1 Introduction
Les machines électriques tournantes occupent une place
prépondérante dans tous les secteurs industriels. Les machines
asynchrones triphasées à cage d'écureuil sont les plus
fréquemment utilisées grâce à leur robustesse, leur
simplicité de construction et leur bas coût. Néanmoins,
celles-ci subissent au cours de leur durée de vie un certain nombre de
sollicitations externes ou internes qui peuvent les rendre défaillantes.
Les contraintes industrielles en fiabilité, maintenabilité,
disponibilité et sécurité des équipements sont par
ailleurs très fortes. C'est pourquoi le monde industriel est fortement
intéressé par un ensemble de techniques permettant de
déterminer l'état de santé de ces machines.
Plus généralement, la surveillance et le
diagnostic en génie électrique remettent en cause les concepts et
les outils traditionnels utilisés en conception et commande des machines
électriques tournantes. La modélisation des machines asynchrones
triphasées à cage d'écureuil en vue de la surveillance et
du diagnostic s'insère dans ce contexte.
I.2 Définitions
a. Terminologie propre au diagnostic de défaut
[10]
La terminologie suivante sera adoptée :
a) Système physique (Physical System)
Un système physique est un ensemble
d'éléments (composants, constituants) interconnectés ou en
interaction organisés pour réaliser une fonction.
b) Composant (Component)
Un composant est une partie du système, choisi selon des
critères liés à la modélisation. En
tout premier lieu, le comportement de référence
de ce composant est bien adapté dans le sens où il peut
être défaillant ou servir de support à la propagation de
pannes dans le système. Un composant doit être simple à
modéliser dans le sens où cela doit être naturel : il peut
s'agir d'un composant (physique ou logique) complet du système ou d'une
partie parfaitement délimitée de ce composant, d'un groupe de
composants.
c) Modèle (Model)
Un modèle d'un système physique est une description
de sa structure et une représentation comportementale ou fonctionnelle
de chacun de ses composants . Une représentation comportementale est
constituée de relations entre diverses variables du système,
appelées classiquement relations de causes à effets. Une
représentation fonctionnelle est plus abstraite puisqu'elle ne s'adresse
qu'aux objectifs présumés que le système physique doit
remplir.
d) Défaut (Fault )
- Tout écart entre la caractéristique
observée sur le dispositif et la caractéristique de
référence, lorsque celui-ci est en dehors des
spécifications [AFNOR, 1994].
- C'est n'importe quel état indésirable d'un
composant ou d'un système. Un défaut n'implique pas
nécessairement une défaillance [IEEE, 1988].
- Déviation non permise d'au moins une
propriété ou un paramètre caractéristique du
système des conditions acceptables ou (et) standards.
- Un défaut est une anomalie de comportement au sein d'un
système physique localisée au niveau d'un composant.
La définition de l'AFNOR rattache la notion de
défaut à celle de déviance d'une
caractéristique d'un phénomène,
subordonnant ainsi cette notion à l'existence d'une
référence absolue.
e) Défaillance (Failure)
Une défaillance définit une anomalie fonctionnelle
au sein d'un système physique , c'est-à-dire caractérise
son incapacité à accomplir certaines fonctions qui lui sont
assignées.
Les défauts incluent les défaillances mais la
réciproque n'est pas vraie. Un système peut
remplir sa fonction tout en présentant une anomalie de
comportement. Par exemple, une machine électrotechnique peut produire un
bruit anormal tout en entraînant correctement une charge, en supposant
que telle est sa fonction. Le bruit anormal est un défaut qui peut
permettre de présager d'une défaillance à venir. La
recherche de défauts est donc fondamentale en diagnostic.
f) Panne (Break-down)
La panne est l'inaptitude d'un dispositif à accomplir la
fonction vitale. Il est clair que dès l'apparition d'une
défaillance, caractérisée par la cessation du dispositif
à accomplir sa fonction, on déclarera le dispositif en panne. Par
conséquent, une panne résulte toujours d'une
défaillance.
g) Signatures
La signature théorique d'un défaut peut
être envisagée comme la trace attendue du défaut sur les
différents RRA qui modélisent le système. Autrement dit la
signature théorique d'un défaut peut être envisagée
comme les résultats de détection lorsque tous les tests sensibles
au défaut réagissent.
h) Symptôme (Symptom)
Caractère distinctif d'un état fonctionnel
anormal.
i) Résidu (Residual)
Souvent, lorsque le modèle comportemental de
référence est analytique, les signaux porteurs
de signes ou de symptômes sont appelés
résidus parce qu'ils résultent d'une comparaison entre un
comportement réel et un comportement de référence.
j) Diagnostic (Diagnosis)
Un diagnostic est un état expliqué d'un
système physique compatible avec les informations disponibles sur le
comportement réel du système et avec le modèle de
comportement de référence disponible. Habituellement, le
diagnostic est exprimé par les états des composants ou les
états des relations de description du comportement .
k) Perturbation
Entrée du système physique qui n'est pas une
commande. Autrement dit, c'est une entrée non contrôlée.
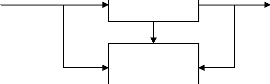
b) la maintenance
La maintenance est définie comme étant «
toutes les activités destinées à maintenir ou à
rétablir un bien dans un état ou dans des conditions
données de sûreté de fonctionnement, pour accomplir une
fonction requise. Ces activités sont une combinaison d'activités
techniques, administratives et de management. ».
Maintenir, c'est donc effectuer des opérations
(dépannage, graissage, visite, réparation,
amélioration...etc.) qui permettent de conserver le potentiel du
matériel, pour assurer la continuité et la qualité de la
production. Bien maintenir, c'est assurer ces opérations pour que le
coût global soit optimum. La figure représente le diagramme des
différents concepts de maintenance et les évènements
associés.
Maintenance

Non Oui
Défaillance
Maintenance
préventive
Maintenance Corrective
|
Maintenance
|
|
Maintenance
|
Maintenance
|
|
Maintenance
|
Maintenance
|
|
systématique
|
|
conditionnel-
le
|
Prévisionnel-
le(prédictive)
|
|
palliative
|
curative
|
<< Ensemble des activités
réalisées après la défaillance du bien, ou la
dégradation de sa fonction pour lui permettre d'accomplir une fonction
requise, au moins provisoirement : ces activités comportent notamment la
localisation de la défaillance et son diagnostic, la remise en
état avec ou sans modification, le contrôle du bon fonctionnement.
>>
· Maintenance préventive
<< Maintenance ayant pour objet de réduire la
probabilité de défaillance ou de dégradation d'un bien ou
d'un service rendu. Les activités correspondantes sont
déclenchées selon un échéancier établi
à partir d'un nombre prédéterminé d'usage
(maintenance systématique), et/ou des critères
prédéterminés significatifs de l'état de
dégradation du bien ou du service (maintenance conditionnelle).
>>
1. Maintenance préventive
systématique
<< Ce type de maintenance comprend l'ensemble des
actions destinées à restaurer, en totalité ou
partiellement, la marge de résistance des matériels non
défaillants. Ces tâches sont décidées en fonction du
temps ou de la production, sans considération de l'état des
matériels à cet instant. >>
2. Maintenance préventive
conditionnelle
<< Ce type de maintenance comprend toutes les
tâches de restauration de matériels ou de composants non
défaillants, entreprises en application d'une évaluation
d'état et de la comparaison avec un critère
d'acceptation préétabli (défaillance
potentielle). >>
3. Maintenance prévisionnelle
(prédictive)
« C'est maintenance préventive
subordonnée à l'analyse de l'évolution surveillée
de paramètres significatifs de la dégradation du bien. Elle
permet de planifier les interventions.>>
Mon travail consiste à effectuer une maintenance
prédictive ` à la demande ' plutôt que d'effectuer une
maintenance systématique (méthode traditionnelle). Cela
évite de faire des changements de pièces qui dans 90 % des cas se
font de manière prématurée. Cela permet aussi de
prévoir une intervention lors d'un arrêt de production
programmé ou, si le cas le nécessite, lors d'un arrêt
d'urgence toujours moins pénalisant qu'un arrêt forcé. De
plus, les réparations avant incident sont plus faciles à
exécuter et moins coûteuses (en temps d'intervention et en
matériel). Il est aussi important de savoir qu'un
défaut non traité peut entraîner des dégradations
encore plus importantes.
Le concept hautement stratégique de maintenance
prédictive qui a poussé des chercheurs
à y contribuer diversement, nécessite la
connaissance des grandeurs significatives à mesurer pour avoir une image
aussi proche que possible de l'état de la machine. Le système de
suivi de la machine devrait pouvoir :
· interférer le moins possible avec le
système (les grandeurs peuvent-elles être mesurées " en
ligne ? ", problème de sécurité,....)
· être capable de suivre plusieurs grandeurs,
· être évolutif,
· être pilotable à distance,
· pouvoir stocker les données pour permettre une
analyse tendancielle.
Quant à la stratégie adoptée, elle consiste
à :
· recenser les défauts et les pannes pouvant se
produire,
· trouver les grandeurs mesurables liées à
ces défauts,
· choisir la méthode la plus proche des
critères définis ci-dessus,
· définir les seuils "d'alarme " à partir
desquels il faudra intervenir.
I.3 Techniques de contrôle en ligne (non
destructif)
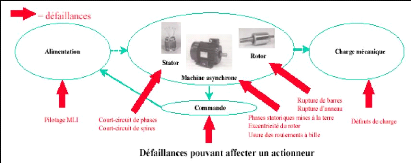
Figure I.2 : Différentes défaillances pouvant
affecter une machine asynchrone [11]
Les entraînements électriques utilisent de plus
en plus les moteurs asynchrones à cause de leur robustesse, leur
puissance massique et leur faible coût de construction, mais il arrive
que ces machines présentent des pannes (défauts)
électriques ou mécaniques.
Des études statistiques nous révèlent que
certaines pannes sont plus fréquentes que d'autres, ce qui nous
amène à axer notre étude vers un type de défaut le
plus courant.
Parmi les pannes majeures, nous trouvons les suivantes :
1. Les cassures de barres et de portions d'anneaux des
cages
La détection de ces défaillances est rendue
difficile par le fait que lors de leurs apparitions, la machine continue de
fonctionner. Ces défauts ont par ailleurs un effet cumulatif. Le courant
que conduisait une barre cassée, par exemple, se répartit sur les
barres adjacentes. Ces barres sont alors surchargées, ce qui conduit
à leurs ruptures, et ainsi de suite jusqu'à la rupture d'un
nombre suffisamment important de barres pour provoquer l'arrêt de la
machine. Elles provoquent aussi une dissymétrie de répartition de
courant au rotor et des à-coups de couples, ceci va
générer des vibrations et l'apparition de défauts
mécaniques.
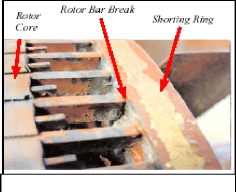
Figure I.3 : Barre cassé au niveau du rotor [12]
2. Les courts-circuits internes : un
court-circuit entre phases provoquerait un arrêt net de la machine.
Cependant, un court-circuit au bobinage prés du neutre ou entre spires
n'a pas un effet aussi radical. Il conduit à un
déséquilibre de phases, ce qui a une répercussion directe
sur le couple. Ce type de défauts perturbe aussi sensiblement les
commandes développées sur la base du modèle de Park
(hypothèse d'un modèle équilibré).
3. Les décharges partielles : Ce
phénomène naturel du aux décharges dans les isolants entre
conducteurs ou entre conducteurs et la masse s'amplifie avec le vieillissement
des isolants. Il est pratiquement imperceptible dans les isolants neufs par les
moyens de mesures classiques
car son effet n'est pas discernable par rapport aux bruits de
mesure. Sa présence précède l'apparition des
courts-circuits entre phases ou entre phase et masse lorsque ces
décharges partielles ont suffisamment détérioré les
isolants.
4. Dissymétrie du rotor : Celui-ci
provoque la variation de l'entrefer dans le moteur, une répartition non
homogène des courants dans le rotor et le déséquilibre des
courants statoriques. Le déséquilibre des efforts sur les barres
génère un couple global non constant.
Les défauts qui se produisent au niveau du rotor et leurs
effets sur les signaux électriques (courant, couple, flux ) et
mécaniques ( vibration ) mais aussi chimiques (dégagement
d'ozone, composition de l'huile des paliers ) de la machine asynchrone sont
importants et intéressent actuellement de plus en plus les chercheurs vu
les gros progrès réalisés au niveau du stator et vu les
études statistiques qui indiquent des pourcentages élevés
des défauts qui se produits au niveau du rotor, par exemple, on prend
une étude statistique, effectuée en 1988 par une compagnie
d'assurance allemande de systèmes industriels sur les pannes des
machines asynchrones de moyenne puissance (de 50 kW à 200 kW ) a
montré que : 22 % des défauts se sont des défauts
rotoriques.
Les méthodes traditionnelles de détection de
défauts reposent sur des prélèvements statiques ou des
essais destructifs effectués sur des échantillons à tester
: diagnostic de l'isolation, mesures vibratoires, tests chimiques, ......
Toutes ces techniques exigent un arrêt total des machines
nécessitant une main d'oeuvre qualifiée et induisant une perte de
production donc un préjudice économique, ce qui justifie
l'intérêt des recherches menées aujourd'hui en vu d'aboutir
à une surveillance non destructive (en ligne) qui permet de
détecter à temps le 1er défauts, donc
éviter les dysfonctionnements ainsi que les opérations de
maintenance lourdes et coûteuses associées.
Ces méthodes de C.N.D (contrôle non destructif) se
sont concrétisées grâce surtout aux outils de
modélisation, des techniques de traitement de signale, ...
Les principales techniques de C.N.D sont:
- Contrôle d'étanchéité
(détection : fuites, trous, porosité,..)
- Ressuage (détection : discontinuité
matière ouverte, contrôle de l'état de surface, ...)
- magnètoscopie (détection : défauts
superficiels sur matériaux ferromagnétiques, arbre, anneaux,
...)
- Radiographie (détection :
inhomogénéité en épaisseur, fissures, corrosion,
...) - Ultra son (contrôle : défauts internes, fissures, cordons
de soudure, ...)
Diagnostic de la défaillance
Diagnostic
Localisation de la défaillance
Importance de la
défaillance
Causes des défaillances
Modèle du processus Non défaillant
- Courants de Foucault (détection : anomalies dans la
conductivité électrique ou dans la perméabilité
magnétique, variation de composition d'un alliage, )
- Thermiques (détection :anomalies de transmission de
chaleur au sein de la matière, ...)
- Emission acoustique (détection : écoulement de
fluide, rupture par fatigue, déformation plastique, ...)
- Holographie (détection : manque de liaisons, vibration
de faible amplitude, ...)
- Analyse de signature (détection : anomalies au niveau
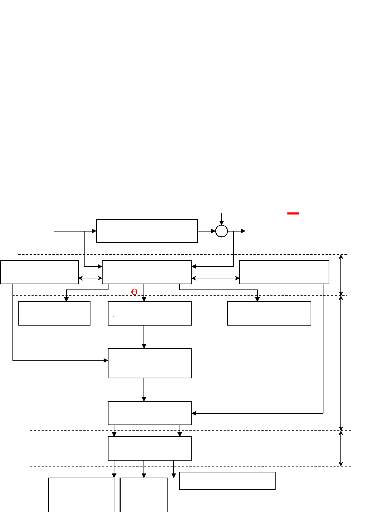
des masses, vibrations, ...) I.4 Les approches usuelles de
détection :
On va présente deux méthodes utilisées en
diagnostic de systèmes physiques
Méthodes sans modèle analytique - Méthodes
basées sur les modèles analytiques Actuellement, on s'oriente
vers des systèmes de diagnostic mettant en oeuvre différentes
techniques de détection. En effet, chacune d'entre elles est plus ou
moins bien adaptée pour appréhender tel ou tel type de
défaut. Par exemple, on s'orientera vers les méthodes à
base
d'estimation paramétrique lorsqu'on souhaite localiser un
défaut qui se manifeste par une
variation des paramètres du modèle
identifié.
Estimation d'état
u
X
Type de défaillance
Quantité de comparaison
Modèle du processus observé
Processus réel
Estimation des paramètres
Génération De résidus
Décision
Signature de la défaillance
Quantités caractéristiques
n
Modèle du processus défaillent
Grandeurs non v mesurables
Détection de la défaillance
Modélisation
Figure I.4 : Approche générale retenue [11]
I.4.1 Méthodes sans modèle
analytique
I.4.1.1 Analyse fréquentielle
(Filtrage)
Une première approche du traitement du signal repose sur
l'analyse fréquentielle (transformée
de Fourier). Elle est bien évidemment très
utilisée pour la détection de phénomènes
périodiques comme en analyse vibratoire. L'analyse du spectre des
signaux issus des capteurs permet de déterminer très
efficacement
l'état de l'installation sous surveillance. Les signaux
sont ici tout d'abord analysés en état normal de fonctionnement.
Ensuite, toute déviation des caractéristiques
fréquentielles d'un signal est reliée à une situation de
panne (le problème, c'est qu'un changement de consigne modifie les
caractéristiques fréquentielles et cela n'a rien d'un
défaut).
I.4.1.2 Redondance matérielle
Cette méthode consiste à multiplier physiquement
les capteurs critiques d'une installation.
Un traitement des signaux issus des éléments
redondants effectue des comparaisons et distingue l'élément
défectueux en cas d'incohérence. Cette méthode est
pénalisante en termes de poids, puissance consommée, volume et
coût (d'achat et de maintenance). Elle est donc essentiellement
réservée aux cas où la continuité de service est
obligatoire (e.g. l'aérospatiale, le nucléaire). En effet, elle
apporte l'avantage, une fois la défaillance détectée et
localisée, de pouvoir utiliser la
partie de l'équipement encore saine mais cette technique
ne s'applique généralement que sur des capteurs.
I.4.1.3 Capteurs spécifiques
(capteurs-détecteurs)
Des capteurs spécifiques peuvent également
être utilisés pour générer directement des signaux
de détection ou connaître l'état d'un composant. Par
exemple, les capteurs de fin de course,
d'état de fonctionnement d'un moteur ou de
dépassement de seuils sont largement employés
dans les installations industrielles.
I.4.1.4 Réseaux de neurones
artificiels
Quand la connaissance sur le procédé à
surveiller n'est pas suffisante et que le développement d'un
modèle de connaissance du procédé est impossible,
l'utilisation de modèle dit << boîte noire>> peut
être envisagée. Pour cela des réseaux de neurones
artificiels (RNA) ont été utilisés. Un RNA est en fait un
système informatique constitué d'un nombre de processeurs
élémentaires (ou noeuds) interconnectés
entre eux qui traite -de façon dynamique- l'information qui lui arrive
à partir des signaux extérieurs.
I.4.2 Méthodes basées sur les
modèles analytiques
La plupart des méthodes de détection et de
diagnostic en ligne s'appuient sur des les mesures.
Il existe des méthodes qui utilisent plus de
connaissances que celles apportées par les seuls capteurs physiques. Ces
connaissances peuvent en particulier provenir de la connaissance du
comportement entrée /sortie d'un procédé ou des processus
qui en gouverneraient l'évolution. Cette connaissance est
généralement exprimée sous forme de modèles
mathématiques.
Parmi les différentes méthodes de détection
utilisant des modèles mathématiques, nous trouverons
principalement l'espace de parité, les Observateurs et l'estimation
paramétrique. I.4.2.1 Espace de parité
Son nom provient du domaine de l'informatique où le
contrôle de parité se faisait dans les circuits logiques. Le
principe de la méthode est la vérification de la consistance
existante entre les entrées et les sorties du système
surveillé
I.4.2.2 Observateurs
Par la suite, nous ferons référence à la
stratégie appelée par certains auteurs << par
observateurs >> ou encore << en boucle fermée
>> par opposition aux méthodes en boucle ouverte, qui
correspondent à celles de l'espace de parité décrite
précédemment.
I.4.2.3 Estimation paramétrique
L'approche d'estimation paramétrique mesure l'influence
des défauts sur les paramètres et non plus, comme
précédemment, sur les variables du système physique.
Le principe consiste à estimer en continu des
paramètres du procédé en utilisant les mesures
d'entrée/sortie et en l'évaluation de la distance qui les
sépare des valeurs de référence de l'état normal du
procédé .
L'estimation paramétrique possède l'avantage
d'apporter de l'information sur la taille des déviations. Toutefois, un
des inconvénients majeurs de la méthode réside dans la
nécessité d'avoir un système physique excité en
permanence. Ceci pose des problèmes pratiques dans le cas de
procédés dangereux ou fonctionnant en mode stationnaire. De plus,
les relations entre les paramètres mathématiques et physiques ne
sont pas toujours inversibles de façon unitaire, ce qui complique la
tâche du diagnostic basé sur les résidus.
Défauts Inconnues

Procédé
Estimation
des
paramètres

Paramètres physiques

Décision
Résidu

Figure I.5 : Estimation paramétrique pour la
détection et le diagnostic de défauts I.5 Description des
différentes méthodes d'analyse:
Le diagnostic en ligne de défauts rotoriques dans les
machines asynchrones en vu d'aboutir à une maintenance prédictive
a poussé les chercheurs à mettre au point diverses techniques. La
majorité de ces travaux se sont basés sur la signature de
grandeurs externes telles que (courant, couple) utilisant la théorie de
champs tournants et celle des circuits électriques.
Durant la décade passée, les équipes de
Williamson et Smith ont basé leur étude faite en
régime permanent sur la détection des signaux modulés
à une fréquence double du glissement (2*g*fs) apparaissant lors
de dissymétries rotoriques suite à des défauts de cage.
Ils ont utilisé le schéma multi- enroulement
équivalent, où chaque maille électrique est
assimilée à un enroulement monophasé
générant deux champs tournant en sens inverse à la
fréquence( g*fs ) par rapport au rotor, donc à la
fréquence de Delerio :
fk = fs [(k/p). (1-g)+g]
Oü
k : rang harmonique
p : nbre de paire de pôles g : le glissement
fs : fréquence fondamentale
Par rapport au stator. Ils ont constaté une diminution des
courants statoriques ainsi que du couple et une surcharge en courant dans les
barres voisines au défaut.
Ils ont conclu aussi qu'il est difficile de détecter la
première barre cassée à cause de la faible amplitude de la
raie de défaut.
T.Boumegoura << recherche de signature
électromagnétique des défauts dans une machine asynchrone
et synthèse d'observateurs en vue du diagnostic » a fait une
étude sur les effets des défauts de la machine asynchrone et a
proposé une approche qui repose sur la surveillance de paramètres
de modèles comportementaux de la machine, sensible au défauts :
Les résistances rotoriques d'un modèle triphasé,
l'inductance magnétisante et la résistance rotorique d'un
modèle diphasé.
Des outils de détection des défauts rotoriques,
basés sur des observateurs de Kalman et grand gain étendu
adaptés aux systèmes non- linéaires ont été
synthétisés pour tracer les paramètres
précédents.
S. Amrane elle a envisagé une
surveillance en ligne des machines (concept de maintenance prédictive)
et elle a particulièrement intéressé à la
détection de défauts de cages de moteurs d'induction, en
utilisant une approche analytique basée sur la signature des de
grandeurs externes. Et pour améliorer le diagnostic elle a
proposé un mode de surveillance actif par action sur les grandeurs
d'entée et de sortie du système.
Gaétan. Didier, Hubert. Razik ont
développé une technique maintenant répandue qui est
l'<< analyse de la signature du courant du moteur » en vue
de la détection d'une panne électrique ou mécanique et ils
ont posé l'accent sur la détection d'un défaut au rotor,
rupture partielle ou non d'une barre de la cage d'écureuil ou d'une
portion d'anneau, par l'analyse spectrale du courant absorbé au
réseau électrique.
Jufer et abdellaziz ont proposé un
schéma multi- enroulement équivalent à la cage rotorique
tenant compte de l'influence du stator par le biais de sources de potentiel
équivalentes à l'effet du bobinage en utilisant la théorie
des deux axes.
Ils ont mis en évidence le même
phénomène de modulation en amplitude du courant statorique
à (2.g.fs), mais le champ d'application de leur méthode se trouve
limité par le fait qu'il ne considère que des défauts
concentrés suite à un phénomène d'avalanche ne
touchant que les
barres adjacentes au défaut : surcharge du courant direct
(id) en cas de barres cassées et surcharge du courant transversal (iq)
en cas de rupture d'anneaux.
E.ritchie, X.deng and T.jokinen
ont fait une étude en régime dynamique utilisant le
schéma multi- enroulement avec référentiel lie au
rotor.
Les résultats de simulation de la cage saine concordent
très bien avec ceux de l'expérience de modèle étant
limite en cas de rupture de barres, ils ont proposé d'affecter à
la résistance de la barre casée une valeur finie au lieu d'une
valeur infinie pour prendre en compte les courants inter- barres.
Roland casimir « diagnostic des
défauts des machines asynchrones par reconnaissance des formes
» a fait une approche qui est basée sur l'utilisation des
méthodes de reconnaissance des formes. Un vecteur de paramètres,
appelé vecteur forme, est extrait de chacune des mesures
effectuées sur la machine. Les règles de décisions
utilisées permettent de classer les observations, décrites par le
vecteur forme, par rapport aux différents modes de fonctionnement connus
avec ou sans défauts.
Des défauts ont été créés au
rotor et au stator de la machine asynchrone, alimentée soit à
partir du réseau, soit par le biais d'un onduleur de tension.
Les procédures de décisions, basées sur
la règle des k- plus proches voisins et sur le calcul
direct des frontières, ont été utilisées pour
détecter les défauts. Ces algorithmes ont montré
l'efficacité de l'application de la reconnaissance des formes au
diagnostic.
Vas, filippetti ont proposé des
modèles de (N+3) mailles et deux axes ( d et q ) à partir d`un
schéma multi-circuits pour la simulation de la cage saine et celle en
défaut des machines asynchrones en régime transitoire moyennant
la résistance Rr et l'inductance Lr équivalentes.
Leur choix de signature du défaut de cage s'est
porté sur la composante directe (ids) du courant statorique qui
n'était faible que pour un nombre élevé de barres
cassées.
Dorell, Paterson, ont opté pour l'analyse
spectrale du courant de phase statorique, ils ont constaté que :
La fréquence (1-2.g.fs) domine lorsque la tension est
réduite ou si l'inertie est grande la fréquence (1+2.g.fs) domine
lorsque la tension est élevée o si l'inertie est faible.
I.6 Conclusion :
D'après l'état de l'art des méthodes
utilisées pour l'identification et le diagnostic des défauts de
la machine asynchrone à cage d'écureuil, dans sa partie
rotorique, on a constaté que : Les défauts dans la partie
rotorique de la machine asynchrone occupent une partie importante dans le
domaine du diagnostic.
Chapitre II
Modélisation du schéma
multienroulements de la machine
asynchrone
II.1 Introduction
Les machines asynchrones à rotor en court-circuit
consomment plus de 40% de l'énergie
électrique produite ;
elles sont largement utilisées vu les avantages qu'elles
présentent à savoir :
- leur simplicité et leur robustesse mécanique,
- leur fonctionnement sans génération
d'étincelles d'où un entretien réduit,
- la normalisation des réseaux de distribution de
l'énergie électrique se prête bien à l'utilisation
directe de ces moteurs (tensions et fréquences constantes),
- un prix de revient relativement faible.
Par ailleurs, la machine asynchrone, malgré ses
qualités, peut présenter des défauts structurels. Dans ce
chapitre, nous portons notre attention sur la rupture totale ou partielle de
barres rotoriques, tout particulièrement au niveau de la brasure barre-
anneau. Pour ce faire, il convient de développer un modèle qui
tienne compte de la structure du rotor.
En effet, Pour étudier ces machines à induction on
fait appel soit à la théorie du champs
électromagnétique (équations de Maxwell), soit à la
théorie des circuits électriques (lois de Kirchhoff) ; ou bien la
méthode mixte combinant la théorie du champ
électromagnétique et la théorie des circuits
électriques [7].
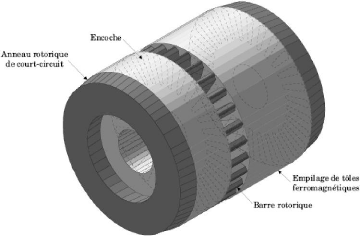
Figure (II.I) : constitution et disposition d'une cage rotorique
[1]
Il est fonction du type d'approche utilisée. On en
distingue deux , assez complémentaires :
- une approche dite << locale > car basée sur
la signature de grandeurs locales telles que la densité de flux ; il
s'agit souvent de méthodes numériques par éléments
finis permettant une analyse fine des phénomènes physiques locaux
associés aux défauts de cages,
- une approche analytique basée, quant à elle,
sur la signature de grandeurs externes globales telles que courants, couple
électromagnétique ; elle utilise le modèle de Kirchhoff,
(réseau électrique équivalent à la machine) ainsi
que la transformation << des 2 axes > appliquée aux
équations électriques du système multi enroulements
étudié. En fin, cette approche s'adapte particulièrement
bien au problème posé ici et vu sa simplicité nous l'avons
adoptée comme démarche.
II.3 Schéma multi enroulements
équivalent
Pour l'étude analytique des performances des moteurs
d'induction avec dissymétries rotoriques, nous avons adopté le
schéma multi enroulements équivalent qui s'adapte bien au
problème posé, car il décrit le rotor comme un ensemble de
mailles interconnectées entre elles, chacune formée par deux
barres adjacentes et les portions d'anneaux qui les relient (figure II.1).
A partir d'hypothèses classiques qui supposent que la
perméabilité du fer est infinie, que l'entrefer est lisse et
constant et que la f.m.m. statorique est à distribution
sinusoïdale, on calcule les différentes inductances et mutuelles
qui interviennent dans les équations du circuit.
II.3.1 Calcul des inductances [4] II.3.1.1
Stator
L'induction due à la bobine statorique de la phase m
s'écrit :
|
?
??
|
(II.1)
|
|
|
|
B sm
|
2 N ? - 2 ð
s
( ) 0
è = u I cos ?? p m
sm è
ð ep 3
|
Par conséquent, le flux principal et l'inductance cyclique
sont donnés par :
Ö
2
= 4 p oNs RLI
(II.2)sm
psmð ep2
L = 3 L sl 0 Ns
sc 2 sp +1 = p ep2 RL+
6


Lsl (II.3)
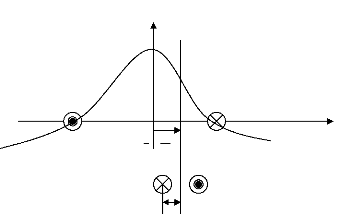
II.3.1.2 Rotor
Le rotor à cage est représenté par la figure
II.2. La figure II.3 représente la forme d'onde de l'induction produite
par la maille rotorique k.
Ir(k-1)
Ir(k-2) Ir(k+1)
Ie
Irk
Figure II.2 :
Schéma multi enroulements du rotor
2ð
0
a r
I bk = I rk - Ir ( k
+ 1 ) (II.4)
r
r 1 u
2 rk = N e0 Irkar r
è
Nr -1 u0 Irkr
ar
N e
r
2ð
Nr
Irk
B 1
rk =
Irk Représente le courant de maille k et
Ibk le courant de barre K , avec :
On voit bien, à travers la figure II.2 qu'il n'est pas
possible de retenir l'hypothèse du premier harmonique qui concerne
l'induction produite par une maille du rotor. Partant de cette
répartition, on calcule alors l'inductance principale d'une maille
rotorique ainsi que la mutuelle entre deux mailles :
L rp
M rr
N
(II.5)
(II.6)
r -1 u0 2
= ðLR
1
Nr 2 e
= - u 0 2ff,LR
N 2 e
II.3.1.3. Stator Rotor
L'induction produite par la bobine statorique de la phase
m induit dans la maille rotorique K le flux :
|
è
+
p
|
k
|
2 ð
N r
|
ð
+
N r
|
|
Ö
|
smrk
|
r r
B dS = -
sm rk
? ?
|
B sm
|
( ' ) '
è LRd è
|
(II.7)
|
N N
r r
k
Srk
è
+
p
2 ð
ð
è ð ð
2
+ k +
r
1

[ ?]
? - ? N N r
2 ð
0 p
N I LR sin '
? p m
è (II.8)
ð ep
s sm p ? 3 +

? è ð ð
2
k -
Bs
0
p
Nr Nr
Ir 0 Phase a
è
è k 2 ð
+
Nr
ð
Irk Maille rotorique k
Ñ
Nr
Figure II.4 : Position de la maille
rotorique K , par rapport à la bobine
de la phase statorique
( m = 0)
Il en résulte la mutuelle stator rotor entre la phase
statorique m et la maille rotorique K :
(II.9)
2 ð ?
M smrk M sr è m
= - ? -
cos ?? + k á ??
3
Où M = 0 Ns LR
sin á
sr 4 u
2
ep 2
(II.10)
Et á = p 2ð est
l'angle électrique entre deux mailles rotoriques.
Nr
II.3.2. Mise en équation
Nous utilisons une transformation de Clarke pour passer des
grandeurs triphasées statoriques ( a, b, c ) aux grandeurs
diphasées ( á â ) . Nous pouvons effectuer la
simulation avec deux repères distincts pour le stator et le rotor.
Pour alléger le temps de calcul, on élimine
l'angle è de la matrice de couplage en choisissant le
repère le plus adéquat et qui est celui du rotor. Dans ce
repère, toutes les grandeurs ont une pulsation gùs en
régime permanent. Cette caractéristique peut être
utilisée pour l'analyse de rupture de barres rotoriques dans la machine
par l'observation du courant ids .
II.3.2.1. Stator
On déduit pour l'ensemble des phases statoriques
[ V sabc ] = [ Rs][ I
sabc]+ dt[ Ö sad (II.11)
Après transformation et rotation, les équations
électriques dans le repère rotorique s'écrits :

V ds = Rs ids -ù
Ö qs +dÖ ds
dt
(II.12)

dt
V = R iqs +ùÖds
+dÖqs
(II.13)

L
L
cos
sin
? ?
M sr
?? - ??
0
Lsc
ids
Ösdq
qs
0
Lsc
Avec :
Nous obtenons :
? ?
? I r 0
? ?
? M ?
j á L ? Ò (II.14)

I rj
? ?
j á L Òÿ? Ò
? ?
? M ?
? ?

?
Ir (Nr
- 1 ) ?

dI
di
dI
dI
(N - 1 )
r
ds
)
Msr
0 + cos 1á r1 +
+ cos já rj+ + cos(
Nr-1)á
dI
Lsc
dt
d t dt
dt
dt
(II.15)
(cos 0á
V ds =Rs ids
- ù[ Lsciqs - Msr (sin
0á Ir0 + sin 1á
Ir1 + + sin já I+ + sin(
Nr - 1)á Ir
(Nr- 1) ).]
+ ù [ L i M
- (cos 0 á I + cos 1 á I + +
cos j I
á + +
cos( 1)
N - á I ( N - 1 ) ) ]
sc ds sr r 0 r 1 rj r r r
dI
r 0 r 1 rj
+ 1 + + i j + + sin( 1)
N - á r
dt dt dt
sin
dI
d i
qs
+
-
dt
(sin 0 á
M sr
Lsc
)
(N - 1 )
r
dI r

dt
(II.16)
dI
On écrit les équations sous la forme :
[ ] [ I ] [ V ] [ R ][ I]
d
L = - (II.17)
dt
Donc :
di
dI
)
( -1)
N
r

ids
R s
Vds
dt
(II.18)
dI dI
Lsc
ds r 0 rj r
- M (cos 0 á + +
cos j á + +
cos( 1)
N - á sr r
dt
dt dt
0á I r0 + + sin
já I + + sin( N r - 1)á I r
-
+ù
ù
i qs
M sr
(sin
L sc

)
( -1)
N
r
Et :
d i
qs
M sr
Lsc
dt
dI
dI
0
(sin 0á r
+ sin já rj+ + sin(
Nr-1)á dI ) V s R
r (N -1)
= s iQs
dt dt dt (II.1 9)
|
-
|
ù
|
L sc
|
i ds
|
ù
M sr (cos 0á I
r0 + + cos já
|
I + + cos( Nr -1)á
Ir
|
(Nr-1) )
|
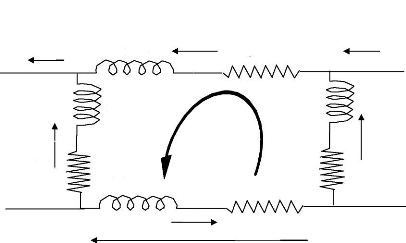
II.3.2.2 Rotor
une maille du rotor à cage est représentée
par la figure II.5
Irk
Ir(k+1)
Re/Nr
2 1
Ir(k-1)
Lb(k-1)
Lbk
Ibk
Irk
Ib(k-1)
Rb(k-1)
Rbk
3 Iek 4
Le/Nr
Re/Nr
Le/Nr
Figure II.5 : Représentation d'une maille rotorique
IeIrk représente le courant de maille K ,
Ibk le courant de la barre K .
Pour le noeud n° 1 :
Ibk = I rk - I r( k
+1) (II.20)
Pour le noeud n° 2 :
I b k = I r k - - I rk
( 1 )
- (II.21)
( 1 )
L'équation électrique relative à la maille
K est :
R [ ] [ ] [ ] dt
R d Ö
e e rk
0 = -
I R I - +
I I I R I I
- + - + (II.22)
rk b k
( 1 ) ( 1 )
- r k - rk rk e bk rk r k
( 1 )
+
N N
ü r
Donc l'équation électrique relative à la
maille K devient :
0 = R e I rk -I R+R
e [ I rk - I e Ibk Rbk+ dÖ
(II.23)
b(k - 1 ) b(k -1)
NN
dt
r r
Le flux induit dans la maille rotorique est donné par :

rk = rprk+ M ?I j - 2 3
Msr (cfr cos Ká + i
qs sin Ká)+ e (I
rk I ek ) + L b(
j
, b( k- 1)
+Ibk) (II.24)
Ö
Nr-1
j ? k
j
?
k
Le terme en Lrp représente le flux principal,
celui en M représente le flux mutuel avec les autres mailles
rotoriques, puis viennent les termes de couplage avec le stator. On remarquera
le facteur 3 2 par rapport à l'équation statorique
à cause de la transformation de Clark.
Les termes en Lb et Le
représentent les fuites rotoriques.
On essaye d'écrire l'équation (II.24) uniquement en
fonction des courants de maille ;
I rk - Ie= Iek (II.25)
Où : Ie représente le courant de l'annau
de court circuit, On a :
dIr( k-1)
dIr( k+1)
dt
dt
(
Lb
Re
-
R bk I r
( k +1)
Ie
? ? ?
Nr
- L I
b [ r k + I r k ] b rk
+ 2 L I
( 1 )
- ( 1 )
+
cos Ká +qs sin
Ká
- R b( k- 1) I(k -
)
2
L e
L e
-
+
Irk
Nr
Nr
2
Le
on aboutit à :
+ 2L b)dIrk
dt
Nr
L +
2
+ R bk +Rb
dIe
Re
?
I ?
?
Le
dt
( k -1)
Nr
Nr
1
dI rj
-
?
M rr
dt
0
k
?
j
j
N r
)
3
(
dids
2
Msr
dt
(II.26)
cos ká + diqs
sin
dt
Ie
)
ká
(II.27)
Ö rk = Lrp rk +
1
-
Nr
M I
rr ? rj
j
j
0
k
?
3
-
2
Msr
(ids
Pour l'anneau de court circuit
Le système complet [L] [ ]
d I
= [ V ] - [ R][ I] devient :
Nr -1N r - 1
dI L dI R ?
e e rk e
- ? = - ? -

L ? R I ? I ?
(II.28)
e e e rk
dt N dt
r k = 0 ? N r k = 0 ?






1 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
0 L L L -M sr cosjá
0
L ssc

L L


sinjá L L
0
0
Lsc
Msr
L
L L
-
?
ids
2L
L e
iqs
M
M
2 L M L
-
b rr b
M L M M L
rr b
-
rr rr
L
+ + e Nr
-
rp
Nr

2Le
I r 0
M
M
M
2 L M
b rr
Mrr-Lb
Lrp
Lb
M L M rr rr
+ +
Nr
-
d
M
3 3
- M k
cos á - M k
sin á
sr sr
2 2

M
dt


I rj
M
M
M
M

Ir Nr (
2Le
Le
1
-
M
M
2Lb
Lb
Mrr
Mrr
Mrr-Lb
Lrp
M
+ +
Nr
L
-
-

rr
Nr
?
?
I e
Le
L e
0 0
L e
L
L
L L
-
-

Nr
Nr
?
M srùsinjá
Rs - ùLsc
0
1 ?
?
?
?
?
?
?
?
?
?
? ?
L
L
L
L
Vds
Vqs

1 ? ? ? ? ? ? ? ? ? ? ? ?
ids
ùLR
sc s
Ms
0
r ù á
cos j
L
L
L
L
iqs
Re
Re
0 0 2
+ Rb0 + Rb( Nr - 1)-Rb0
Nr
-
0 0
R b Nr
(

? ? ? ? ? ? ? ?
1)
-


0
-

Ir0
Nr

M
0 0
0
M

Re
-
M
0 0
0
2
+Rbk +Rb(k
0
Rb k
Rbk
0
( -1)
1)
-
Irj
-
Nr


M
0 0
0
M

R e
Rb(Nr -2) 2 + R b Nr
Nr
Re
0
Ir( Nr-1)
0 0
0 0
(
- 2) ( 1)
+ R b Nr -
Rb(Nr -1)


-

Nr

L
0
Ie
R
R
0 0
R e
e
e
L
L L
-
-

Nr Nr Ò ÿ
Nr
Nr
? ?
(II.29)
Le couple électromagnétique est obtenu par
dérivation de la co-énergie:
? ? ?
? ?
1
Irk M
M
3 ä? L - M cos( )
è á
+ k L sr
= P i
[ ] t
2 sdq ??L - cos( )
è á
+ L ??
äè M k
sr
Cem
- r
3
C = PM i I k
? Nr ? 1 N 1
-
? sin á - ?
i I k
cos á (II.31)
em ds
sr rk qs rk
2 ? k = 0 k = 0 ?
On y ajoute les équations mécaniques afin d'avoir
la vitesse ? = ù
P
d? 1
dt P
= J em - r -
P C C
( ù ) (II.32)
f
d è =
Et ù
Le système ci-dessus est très compliqué
pour le programmer et l'exécution d'une simulation d'un tel
modèle est très lente, c'est pour cela qu'on a opté pour
un autre modèle, le modèle dq .Nous avons
appliqué une transformation généralisée (
Nr ) qui permet de passer des Nr
grandeurs équilibrées vers deux grandeurs dq . La
simulation de ce modèle est très rapide.
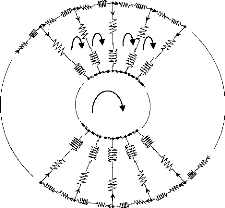
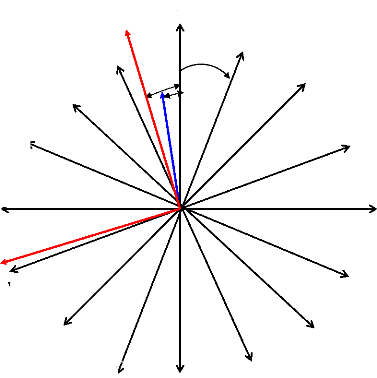
II.4. La transformation de N
grandeurs équilibrées en deux grandeurs
dq [6] r
d Ir0
Ir1
Ir15
è 2ð / 16
Ir2
Ir14
I1
Ir3
â
Ir13
Ir12
q
Ir5
r11
Ir1
Ir6
Ir10
Ir8
Ir9 Ir7
Ir4
Figure (II.6) : projection du modèle multi enroulement sur
le modèle dq > Passage du modèle
polyphasé au modèle biphasé
On calcule les différentes résistances
équivalentes ( S 1 , S 2,
S3, et S4) ;
|
2 ? R ? R ?
2 e 2 + + ? +
e
= ? + + R ?
e
S ? 2 R R cos 0 2
+ ? + +
? á ? R R
cos 1
? á L ? 2
R R
+ ? cos 15
2 á
1 b 0 b 15 b 1 b 0 b
15 b 14
16 N
[ ? ? N ? ? N
r r r ?
|
1 ? ?
|
- [ (
4 R cos 0 cos 1
á á ) (
+ R cos 1 cos 2
á á ) (
+ L + R cos 15 cos 0
á á ]
) (II.33)
b 0 b 1 b 15
16
i
i
0
Rs - ùLsc 0 - Nr ùMsr
2
(II.37)
Nr
ù L sc Rs - ùMsr
0 Re
Rr
0
Rr
0 0
0 0
2
0 0
1 ? ? ? ? ? ? ? ? ?
0 0 0
0 0 0
R
Avec : = 2 + 2 Rb ( 1 - cos
á)
e
R r
Nr
S 2 = - 2 [(2 R e + A0
+g15 jcos0 ásin0 á -(2 R
e +R +g0 jcos1 á sin1
á (2 R e + k5
+Rb14)cos1 5ásin1
6 r r
N Nr
2 rf
+ 6 RR b 0 sin 0 á cos
1á ) + (Rb1 sin 1 á
cos 2á ) +
·
·
· +
(Rb15 sin 15á cos 0á)]
2 rf
i
i
+ 6 RR b 0 cos 0 á sin
1á ) + (Rb1 cos 1 á
sin 2á ) +
·
·
· +
(Rb15 cos 15á sin 0á)] (II.34)
Re
S 3 = - 6[(2 +A0
+g15 jcos0 á sin0 á
-(2 +R +R jcoslasinla-- -
N
r -
· '(
2 Al5+
N #177;r Rb14)cos1
5ásin1
Nr
2 R e Re
2 rf
+ 6 RR b 0 sin 0 á cos
1á ) + (Rb1 sin 1 á
cos 2á ) +
·
·
· +
(Rb15 sin 15á cos 0á)]
2 rf
+ 6 RR b 0 cos 0 á sin
1á ) + (Rb1 cos 1 á
sin 2á ) +
·
·
· +
(Rb15 cos 15á sin 0á)] (II.35)
|
S 4 = 12 6 [(2 e +
R615 cos2 0 á + 2 N R
: + RbI +
Rb0 cos2 1á +
·
·
· + 2
NR: + R ,,,, +
RbI4 cos2 15á
NR + Rb0 r )
( L,=, JJ
|
1 1
i
|
1 ri
- Rb 0 cos 0 á cos
1á ) + (Rb1 cos 1 á
cos 2á) +
·
·
· +
(Rb15 cos 15á cos 0á)] (II.36)
4 6
Si l'on considère que toutes les barres sont saines (
Rb 0 = Rb1 = = Rb15), les
résistances
équivalente S1 , S
2 , S3 , et S 4
Deviennent :
|
S 1 = S4
|
2 Re + 2Rb (
1-- cosá)
Nr
|
R
S 2 = S 3 = 0 , En posant : = 2 + 2
Rb ( 1 - cos á)
e
R
r
Nr
La nouvelle matrice de résistance du modèle
dq équivalent, en considérant que toutes les barres sont
saines est [4] :
0 3 Msr
2
0 0
Nr
-
2
0 Lsc 0
3 Msr
2
Avec :L = L -Mrr + 2 Le +
2Lb( 1-cosè)
p Nr (II.38)
-
Msr 0 0
Nr M sr
2
0 Ò

0 Lrc 0 0
0 Lrc 0
0 0
Lsc 0

Donc le modèle réduit, en considérant que
toutes les barres sont saines est :
?
0
ids
0 0
0 0
0 Rr 0
0 0 R
iqs
idr
iqr
Ie
e Ò ÿ
0
Vds
Vqs
idsi qsidri qrIe
1
? ? 0 ?
Nr
Rs - ù L sc 0 - ù M
sr
2
Nr
ù L Rs
sc - ù M sr
2
0 0 Rr 0 0
0 0
? ? ? ? ? ? ? ?
-
2
3 Msr
Lsc
0 Lsc 0
0
0 0
2
3 Msr
0
0 Lrc 0 0
-
Nr
2
0 Lrc 0
0 0
Msr
Nr
2
0 0
Msr
?
?
?
?
?
?
?
?
Le]
0
dt
(II.39)
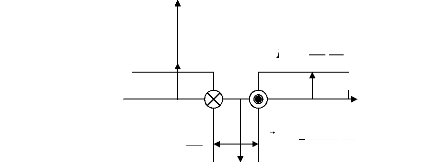
II.5 Contrôle des courants par
hystérésis :
Le principe de cette méthode de contrôle des
courants par hystérésis est basé sur la commande des
interrupteurs de l'onduleur de telle sorte que les variations du courant dans
chaque phase du moteur soit limitées dans une bande
d'hystérésis encadrant les références des
courants.
Ce contrôle se fait par une comparaison permanente entre
les courants réels et les références de courant. La sortie
des comparateurs est reliée à la logique de commande de
l'onduleur de manière à imposer une commutation des interrupteurs
lorsque le courant s'écarte de la valeur d'hystérésis de
sa référence.
Les ondulations du courant sont fixées par la valeur de
la bande d'hystérésis. Dans cette méthode le courant est
toujours imposé aux bornes de la machine. La figure (II-7) donne le
schéma de principe.
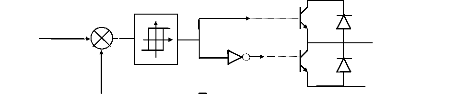
Ti
+
-
i ref
Ti'
inverseur
Comparateur à hystérésis
Bras de l'onduleur
i
Figure II.7 :Principe du contrôle des courants par
hystérésis
II.5.1 Modélisation de l'onduleur
L'onduleur est un convertisseur statique assurant la
conversion continu - alternatif, il est composé de six transistors
(T1,...,T3,T'1,...,T'3) shuntés en anti-parallèle par des diodes
de récupération (D1,...,D3,D'1,...,D'3), qui permettent de
renvoyer le courant négatif vers le condensateur de filtrage mis
à l'entrée de l'onduleur .

+ 1
F i 0
=
si K est fermé et K ouvert
'
i i
si Ki est ouvert et K fermé
i '
? ? ?
(II.40)
Les tensions de ligne aiguillées par l'onduleur sont :
U
= 2 (F1 - F2 )
U
. (F2 - F3)
2
U
. ( - F 1 )
F3
2
Uab
Ubc
L
Uca
(II.41)
La relation imposée par la machine aux tensions de phase
s'exprime par :
Va + Vb + Vc = 0 (II.42)
En tenant compte de cette relation, on déduit les tensions
simples :
|
?
?
?
? ?
|
Va
Vb
V c
|
1 ?
? U . ?
=
? 3 ?
? ? ?
?
|
2 - 1 -1 1 2 -1 1 -1 2
|
? ?
? . ?
? ?
? ? ? ?
|
F 1
F2
F3
|
1
?
?
? ?
|
(II.43)
|
II.5.2 Modélisation du modulateur à
hystérésis
Pour déterminer les signaux de commande des
interrupteurs de l'onduleur, il suffit d'associer un modulateur à
hystérésis pour chacune des trois phases de l'onduleur, ceci
permet de comparer chaque courant de phase avec sa référence de
courant sinusoïdale de telle sorte que la variation de courant dans chaque
phase soit limitée dans une bande encadrant la référence
des courants :
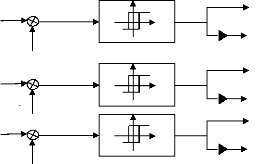
ib
Irefb
+ _
_
ic
Irefa
+ _
ia
Irefc
T1
T1'
T1
T2'
T1
T3'
Figure II.8
Les fonctions logiques représentants les interrupteurs de
l'onduleur sont définis par :
La commutation des composants électriques est
supposée instantanée (composants parfaits).Afin
de simplifier l'étude, nous associons à chaque bras
de l'onduleur, une fonction
logique Fi(i=1,2,3) qui est la sortie du modulateur
Hystérésis.
Les fonctions logiques sont définies ainsi :
i
Fi = 0 si ij-ijref > h
Fi = 1 si ij-ijref >- h (II.44)
Fi = Fi si ijref+h >ij> ijref-h
Avec ij courant de phase, j = a,b,c et ijref courant
de référence II.6 Simulation du modèle
réduit multi enroulements :
a. Cas d'une machine saine à vide : 1.
Alimentation sans onduleur :
0 0.5 1 1.5 2 2.5 3
t(s)
1
n(trLm n)
3500
3000
2500
2000
1000
-500
500
500
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t(s)
1
Cem(N.rn)
18
16
14
12
-2
6
4
2
0
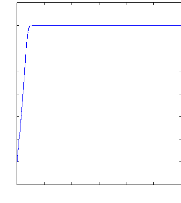
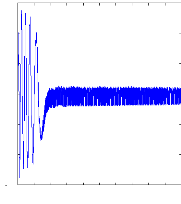
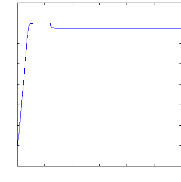
Figure II.9 : vitesse de rotation, couple
électromagnétique, simulation
avec le modèle
réduit, machine saine en charge, Cr=3.5 N.m
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
ias(A)
-15
-2 0
-10
-25
25
20
15
10
-5
5
0
t(s)
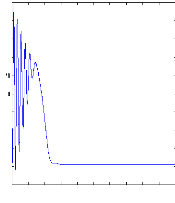
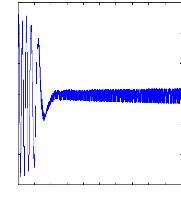
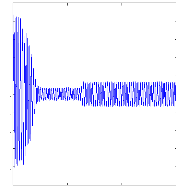
Figure II.10 : courant statorique, simulation avec
le
modèle réduit, machine saine à vide
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t(s)
irbO(A)
-1000
1500
1000
1500
-500
500
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t(s)
irb(A)
-1000
-1500
1500
1000
-500
500
0
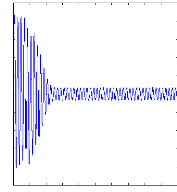
Figure II.11 : courants dans les barres rotoriques,
Irb0,Irb1,Irb2,Irb3,
simulation avec modèle global, machine saine
à vide
2. Alimentation avec onduleur :
0 0.5 1 1.5
nitrim n)
1
1
2500
3500
3000
-500
500
000
500
000
0
0 0.5 1 1.5
Cem(N.m )
12
10
-2
8
6
4
2
0
t(s)
0 0.5 1 1.5
t(s)
las(A)
-10
-15
15
10
-5
5
0
t(s)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t(s)
irb 0(A )
-1000
1500
1000
1500
-500
500
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t(s)
irb 3(A )
-1000
-1500
1500
1000
-500
500
0
0 0.5 1 1.5 2 2.5 3
t(s)
n(trlin n)
1
35 00
30 00
25 00
20 00
10 00
-5 00
5 00
5 00
0
0 0.5 1 1.5
t(s)
C em (N A )
18
16
14
12
-2
0
8
6
4
2
0
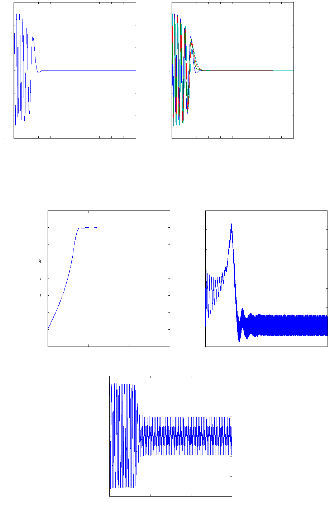
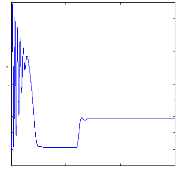
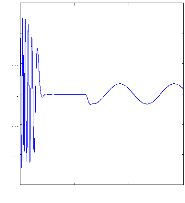
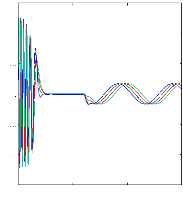
Figure II.12 : simulation du modèle réduit,
Alimentation avec onduleur àvide
A vide :
On n'impose tout d'abord aucun couple de charge et la machine
opère donc a vide. La
Figure( II.9) illustre l'évolution temporelle, en
régime transitoire et en régime permanent, de la vitesse de
rotation, après une phase transitoire, celle-ci se stabilise a une
valeur proche de la vitesse de synchronisme a cause de l'absence d'un couple de
charge, la figure illustre aussi le couple électromagnétique .
Pour le couple, après une phase transitoire, celui-ci se stabilise comme
convenu a une valeur proche de zéro a cause de l'absence d'un couple de
charge. La figure( II.10) illustre l'évolution temporelle, en
régime transitoire et en régime permanent du courant statorique
en absence du couple de charge. La figure (II.11) illustre l'évolution
temporelle, en régime transitoire et en régime permanent, des
courants de barres rotoriques Irb0 , Irb1, Irb2, Irb3. On constate
que les barres rotoriques sont parcourues par des courants faibles mais non
nuls en régime permanent. On peut expliquer cette circulation de
courants par l'existence d'un frottement visqueux qui génère un
faible couple résistant, et par l'existence de champs harmoniques ne
tournant pas, par définition, a la vitesse de synchronisme. Les boucles
rotoriques soumises a des champs fluctuants sont alors le siège de
courants induits.
b.Cas d'une machine saine en charge :
1. Alimentation sans onduleur :
ias(A )
· 10
· 15
· 20
· 25
25
20
15
10
· 5
5
0
0 0.5 1 1.5
t(s)
Figure II.14 : courant statorique, simulation avec
le
modèle réduit, machine saine en charge,
Cr=3.5N.m
0 0.5 1 1.5
t(s)
irbO(A)
· 1000
· 1500
1500
1000
· 500
500
0
0 0.5 1 1.5
t(s)
irb(A)
· 10 00
· 15 00
1500
1000
· 500
500
0
Figure II.15 :courants dans les barres rotoriques,
Irb0,Irb1,Irb2,Irb3, 2. Alimentation avec onduleur :
12
10
8
6
4
Cem(N.m)
2
0
-2
1 5
10
5
0
ia s(A )
-5
-10
-15
500
1000
500
0
irb 0 (A
-500
-1000
-1500
0 0.5 1 1.5
t(s )
0 0.5 1 1.5
t(s)
0 0.5 1 1.5
t(s)
0 0.5 1 1.5
t(s)
3500
3000
2500
000
500
000
k(trim n )
1
1
500
0
-500
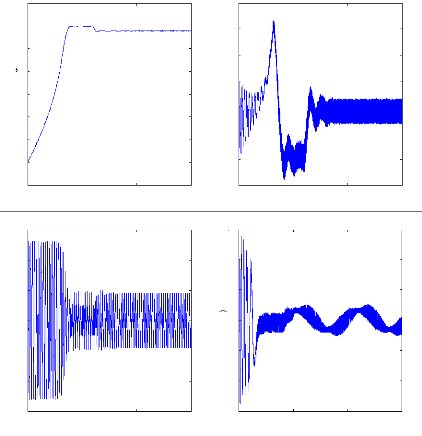
Figure II.16 : simulation du modèle réduit,
Alimentation avec onduleur en charge En charge :
On impose maintenant un couple de charge de 3.5 N.m et la machine
opère alors
en charge. La figure (II.13) illustre l'évolution
temporelle, en régime transitoire et en régime permanent, de la
vitesse de rotation, après une phase transitoire, celle-ci se stabilise
a une valeur de 2885 tr/mn, la figure illustre aussi le couple
électromagnétique . Pour le couple, après une phase
transitoire, celui-ci se stabilise comme convenu à une valeur proche de
3.5 N.m.
La figure(II.14) illustre l'évolution temporelle, en
régime transitoire et en régime permanent, du courant statorique
en présence d'un couple de charge de 3.5 N.m.
La figure(II.15) illustre l'évolution temporelle, en
régime transitoire et en régime permanent, des courants de barres
rotoriques Irb0 , Irb1 , Irb2, Irb3. On constate que les
barres rotoriques sont logiquement parcourues par des courants de
fréquence fondamental g fs0 en régime permanent. Ceux-ci
possèdent également une fréquence fondamentale g fs0 en
régime permanent.
II.7 Conclusion
Dans ce chapitre on a traité la machine asynchrone en
terme de circuit, et on a considéré que le rotor est
constitué de plusieurs éléments, chaque
élément de la cage est décrit par un circuit
électrique équivalent de Nr grandeurs. Puis, on a fait la
transformation de Nr grandeurs vers deux grandeurs, pour faciliter
l'étude.
On remarque que la méthodologie de modélisation
adoptée est assez générique, et peut très bien
être adaptée pour la représentation d'autres types de
machines électriques : machines asynchrones a rotor bobiné,
machines synchrones a aimant permanent ou a rotor bobiné, machines a
reluctance variable. Cette modélisation peut également servir
dans une certaine mesure a des objectifs de conception.
Le modèle constitué donne des résultats
identiques à ceux obtenus dans le cas du modèle classique de la
machine asynchrone et permit d'étudier les différents
défauts rotoriques, donc ce modèle s'adapte bien au
problème posé.
Dans la suite de l'étude, on va plutôt exploiter
la flexibilité du modèle pour rendre compte d'un certain nombre
de défauts rotoriques pouvant affecter les machines asynchrones
triphasées a cage d'écureuil.
Chapitre III
Modélisation et simulation des
défauts
rotoriques de la machine asynchrone
III.1 Introduction
La méthode qu'on a adoptée pour la simulation
des défauts rotoriques consiste à remplacer la valeur initiale de
la résistance des barres cassées par une valeur finie. Cette
méthode est appelée méthode des résistances
finies.
E. Ritchie estime qu'une augmentation de la résistance de
la barre de 11 fois permet d'aboutir à des résultats en
concordance avec ceux obtenus expérimentalement.
En ce qui nous concerne nous avons considéré des
augmentations de 11 fois la résistance initiale de la barre.
En effet pour un pas de 3
10- s, une augmentation de plus de 11 fois conduit
à une instabilité numérique (dans notre modèle).
La méthode d'intégration est celle de Runge Kutta
d'ordre 4.
III.2 Modélisation des défauts dans le cas
de cassures d'une et de deux barres
Le modèle II.39 démontré dans le chapitre
précédent, et réécrit ci-dessous, permet de simuler
la rupture de barres au rotor.
-
2
3 Msr
Lsc
0
0
0 0
2
3 Msr
Lsc
0
0 Lrc 0
0
Nr
2

0
0 0
Msr

Nr
2
0 0
Msr
0 Ò
0 L rc 0

dt
d
i ds
i qs
i dr
i qr
Ie
1
? ? ? ? ?
? ?
1 ?
?
?
?
?
?
?
? ?
ids
i qs
i dr
(III.1)
i qr
Ie
1 ? ? ? ? ?
? ?
Nr
ùM
0
sr
2
-
Nr
ùM
0 0
ùL R
sr
sc
2
-
0
Re
0 0 0
R s - ùL 0
sc
0 0 S 1 S 2 0
0 0 S 3 S 4 0
1 ? ? ? ? ?
? ?
Vds
Vqs
0
0
0
Avec:
|
S 1 = 12 6 [(2 NR e r + R b 0 +
Rb15 )cos2 0
a + (2 N Re r +
Rb1 +Rb0 )cos2 la
+
·
·
· + (2 NRe r +
R b15 Rb
)coS2
|
? ()?
15á
?
|
1 rf \\ \\
- RR b° cos0á
) cosOá p+ ( Rb1
cos0á ) coR2á p+
·
· +
(R615(R615cos0
5á ) coR \\-1 0a (III.2)
4 6
i
i
S2 = - 2 6 [(2 R e r +
A0 +g15 jcos0 ásin0 á
-(2 R e r +R +g0 jcos1 á
sin1 á (2 R e + A15
+Rbdcos1 5ásin1
N Nr
+ 2 6 [ ( R b 0 sin( 0á ) cos(
1á)) + ( Rb1 sin( 1 á
) cos( 2á)) +
·
·
· + (
Rb15 sin( 1 5á ) cos(
0á ))]
+ 6 [(R b° cos(
0á ) sin( 1á)) + (
Rb1 cos( 1á ) sin(
2á))+
·
·
· + (
Rb15 cos( 1 5á ) sin(
0á ))] (III.3)
1
i
i
2 R e Re
S
3 = - 42 Re + A0 +k5 jcos0
á sin0 á -(2 +R +R
}oslá sinlá - -
·
'-(2 + Rb15 +
k4 jcos1 5ásin1
Nr
r r
+ 2 6 [(R b 0 sin( 0á ) cos(
1á)) + ( Rb1 sin( 1 á
) cos( 2á)) +
·
·
· + (
Rb15 sin( 1 5á ) cos(
0á ))]
+ 6 [(R b° cos(
0á ) sin( 1á)) + (
Rb1 cos( 1á ) sin(
2á))+
·
·
· + (
Rb15 cos( 1 5á ) sin(
0á ))] (III.4)
1
|
S = 12 6 ft R r bo
bo) ( R r ) ( R r )
2 e + R + R
cos2 0 á + 2 e +
RbI + Rb0
cos2 1á +
·
·
· + 2
e + R A1 5 + R cos2
15á
4 4," b14
|
1 1
i
|
4 rf , \ , \\ , , \ , \\ , ,
\cos(0a ))] (III.5)
- RR cos0á )cosOáD+
Ob1 cos0á
)coR2áp+
·
·
· + Ob15
cos(15a)cos(0a 5a ) 1 6 b 0
Dans le cas oil on veut simuler la rupture d'une barre ou de deux
barres les seules valeurs qui vont changer sont celles de: S1, S2, S3 et S4
III.2.1. Cassures de barres
La cassure de barres est un des defauts les plus frequents au
rotor. Nos simulations nous permettrons d'identifier les signatures de ce
defaut et de prevoir les deteriorations generees dans le moteur.
Pour illustrer la cassure totale de barre dans le modèle
de la machine, nous augmentons la valeur de la barre cassee de 11 fois [7].
III.2.2 Simulation des défauts rotoriques
à vide et en présence d'une charge sur l'arbre du
moteur
III.2.2.1 Machine à vide
a. Cas d'une cassure d'une barre
. Alimentation sans onduleur
On n'impose tout d'abord aucun couple de charge. La figure III.1
illustre l'evolution temporelle
en regime transitoire et en regime permanent de la vitesse de
rotation en presence d'une rupture de barre (rb0) a t=1s, Apres une
phase transitoire, celle-ci se stabilise a une valeur proche de la vitesse de
synchronisme a cause de l'absence d'un couple de charge. La figure illustre
aussi l'evolution temporelle en regime transitoire et en regime permanent du
couple electromagnetique
Cem en présence d'une rupture de barre (rb0). Après
une phase transitoire, celui-ci se stabilise a une valeur proche de zéro
a cause de l'absence d'un couple de charge.
La figure III.2 illustre l'évolution temporelle en
régime transitoire et en régime permanent du courant statorique ,
en présence d'une rupture d'une barre (rb0) à t=1s
La figure III.3 illustre l'évolution temporelle en
régime transitoire et en régime permanent des courants de barres
Irb0 , Irb1 , Irb2 , Irb3 , en présence d'une
rupture des barres (rb0) à t=1s .
On remarque dans l'essai à vide, les signatures des
défauts rotoriques sont très minimes.
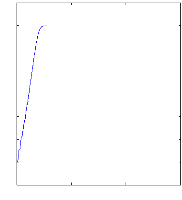
3500
3000
2500
2000
500
1
n(trLm n)
1000
500
0
-500
0 0.5 t(s) 1 1.5
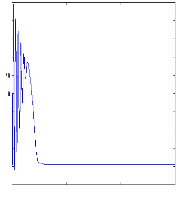
0 0.5 1 1.5
t(s)
1
Cem (N.rn)
18
16
14
12
-2
6
4
2
0
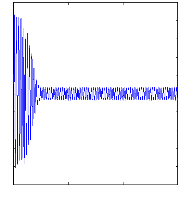
0 0.5 1 1.5
t(s)
ia s (A )
-10
-15
-20
-25
25
20
15
10
-5
5
0
Figure III.1 : vitesse de rotation, couple
électromagnétique ( simulation avec le
modèle
réduit, machine en défaut à vide)
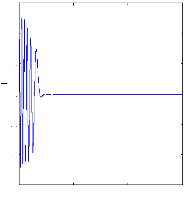
0 0 .5 1 1 .5
t(s)
irb 0 (A
· 1 0 0 0
· 1 5 0 0
1 5 0 0
1 0 0 0
· 5 0 0
5 0 0
0
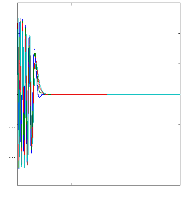
0 0.5 1 1.5
t(s)
irb (A
· 1000
· 1500
1500
1000
· 500
500
0
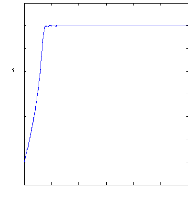
0 0.5 1 1.5 2 2.5 3
t(s)
1
1
k(trim n )
3 5 0 0
3 0 0 0
2 5 0 0
· 500
0 0 0
5 0 0
0 0 0
500
0
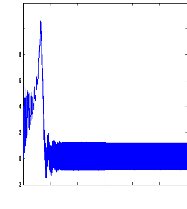
0 0.5 1 1.5 2 2.5 3
t(s)
Cem(N.m
12
10
·
Figure III.3 :courants dans les barres rotoriques,
Irb0,Irb1,Irb2,Irb3,
simulation avec modèle global, machine en
défaut à vide.
. Alimentation avec onduleur
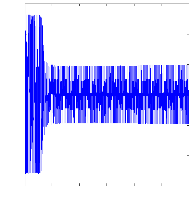
0 0.5 1 1.5 2 2.5 3
t(s)
ias(A )
-10
-15
15
10
-5
5
0
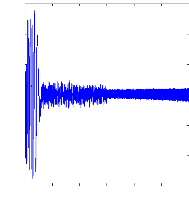
0 0.5 1 1.5 2 2.5 3
t(s)
irbO(A )
-1000
-1500
1500
1000
-500
500
0
Figure III.4 : Simulation avec le modèle réduit,
machine en défaut à vide, alimentation avec
onduleur
b- Cas d'une cassure de deux barres
. Alimentation sans onduleur
La figure III.5 illustre l'évolution temporelle en
régime transitoire et en régime permanent de la vitesse de
rotation en présence d'une rupture de deux barres (rb0)
à t=1s et (rb1) à t=2s, Aprés une phase
transitoire, celle-ci se stabilise à une valeur proche de la vitesse de
synchronisme à cause de l'absence d'un couple de charge. La figure
illustre aussi l'évolution temporelle en régime transitoire et en
régime permanent du couple électromagnétique
Cem en présence d'une rupture des barres (rb0)
à t=1s et (rb1) à t=2s. Après une phase
transitoire, celui-ci se stabilise à une valeur proche de zéro
à cause de l'absence d'un couple de charge. La figure III.6 illustre
l'évolution temporelle en régime transitoire et en régime
permanent du courant statorique , en présence d'une rupture d'une barre
(rb0) à t=1s et (rb1) à t=2s.
La figure III.7 illustre l'évolution temporelle en
régime transitoire et en régime permanent des courants de barres
Irb0 , Irb1 , Irb2 , Irb3 , en
présence d'une rupture des barres (rb0) à t=1s et
(rb1) à t=2s.
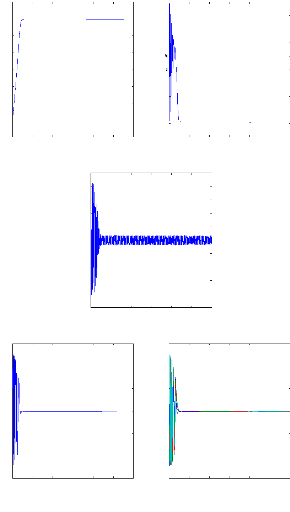
500
0
irb 0 (A )
-500
2 2.5 3
0 0.5 1 1.5
3500
3000
2500
2000
500
1
n(trLm n )
1000
500
0
-500
18
16
14
12
6
1
Cem (N.rn)
4
2
0
-2
0 0.5 1 1.5 2 2.5 3
0 0.5 1 1.5 2 2.5 3
)
Figure III.5 : vitesse de rotation, couple
électromagnétique ,
t(s )
t(s
simulation avec le modèle réduit, machine en
défaut à vide
0 0.5 1 1.5 2 2.5 3
ia s (A )
-10
-15
-20
-25
25
20
15
10
-5
5
0
t(s)
Figure III.6 : courant statorique, simulation avec
le
modèle réduit, machine en défaut à vide
t(s)
0 0.5 1 t(s) 1.5 2 2.5 3
irb (A )
-1000
-1500
1500
1000
-500
500
0
1500
1000
-1000
-1500
Figure III.7 :courants dans les barres rotoriques Irb0 , Irb1 ,
Irb2 , Irb3,
simulation avec modèle global, machine en
défaut à vide
2. Alimentation avec onduleur
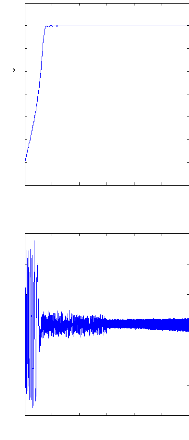
1500
1000
500
0
irbo IA I
-500
-1000
-1500
0 0.5 1 1.5 2 2.5 3
t(s)
0 0.5 1 1.5 2 2.5 3
t(s )
k(trim n )
1
1
3500
3000
2500
-500
000
500
000
500
0
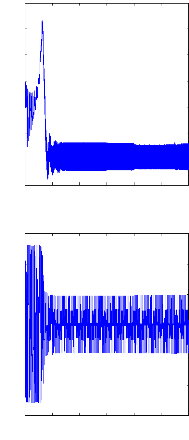
15
10
5
0
ia s (A )
-5
-10
-15
0 0.5 1 1.5 2 2.5 3
t(s)
0 0.5 1 1.5 2 2.5 3
t(s)
Cem(N.m
12
10
-2
8
6
4
2
0
Figure III.8 : Simulation avec le modèle réduit,
machine en défaut à vide, alimentation avec
onduleur
2. Machine en charge
a. Cas d'une cassure d'une barre 2. Alimentation sans
onduleur
On impose maintenant un couple de charge de 3.5 N.m à
t=0.6s et la machine opère alors en charge.
La figure III.9 illustre l'évolution temporelle en
régime transitoire et en régime permanent de la vitesse de
rotation, celle-ci se stabilise a une valeur de 2219 tr/mn. La figure illustre
aussi du couple électromagnétique Cem en présence d'une
rupture des barres rb0 à t=1s. Aprés une phase
transitoire, celui-ci se stabilise a une valeur proche de 3.5 N. m a cause de
la présence du couple de charge.
La figure III.10 illustre l'évolution temporelle en
régime transitoire et en régime permanent du courant statorique ,
en présence d'une rupture de barre rb0 à t=1s .
La figure III.11 illustre l'évolution temporelle en
régime transitoire et en régime permanent des courants de barres
Irb0 , Irb1 , Irb2 , Irb3, en
présence d'une rupture de barre rb1 à t=1s. Les
courants circulant dans les barres adjacentes aux barres cassées sont
très supérieurs a leur valeur nominale. On conclut donc qu'il y a
un risque de défaillances en chacune dans la mesure ou les contraintes
électriques et thermiques sont redistribuées sur les conducteurs
adjacents.
Nous observons se qui suit:
- La vitesse chute à 2917 tr/mn, et le couple
électromagnétique vient équilibrer le couple
résistant .
- La détérioration de la barre réduit la
valeur moyenne du couple électromagnétique et fait
apparaître les oscillations .
- L'oscillation sur la vitesse .
- Les courants des phases statoriques sont toujours
déphasés entre eux de 120°,
Cependant une ondulation de l'amplitude des courants
apparaît avec la cassure de la barre, la figure III.9 illustre cette
ondulation.
- Le rotor avec ce défaut de la structure crée
en plus de champ rotorique direct qui tourne à g*ùs par rapport
au rotor , un champ inverse qui lui tourne à -g*ùs dans le
repère rotorique. L'interaction de ces champs avec celui issu du
bobinage statorique donne naissance à un couple
électromagnétique (somme d'une composante directe constante et
d'une composante inverse sinusoïdale), de pulsation 2g ùs
.Elle sera la cause d'oscillations sur la vitesse [3].
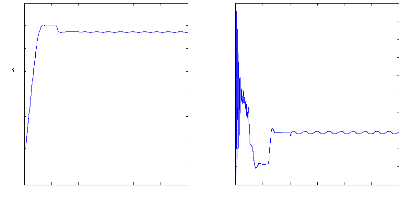
18
16
14
12
10
8
6
Cem(N.m
4
2
0
-2
0 0.5 1 1.5 2 2.5 3
t(s)
0 0.5 1 1.5 2 2.5 3
t(s)
3 5 0 0
3 0 0 0
2 5 0 0
0 0 0
5 0 0
0 0 0
1
1
k(trim n )
500
0
-500
Figure III.9 : vitesse de rotation, couple
électromagnétique et le courant statorique, simulation
avec le
modèle réduit, machine en défaut en charge,
Cr=3.5 N.m
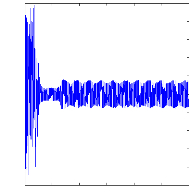
0 0.5 1 1.5 2 2.5 3
ia s(A )
-10
-15
-20
-25
25
20
15
10
-5
5
0
t(s)
Figure III.10 : courant statorique, simulation avec le
modèle réduit, machine avec défaut
en
charge,Cr=3.5 N.m
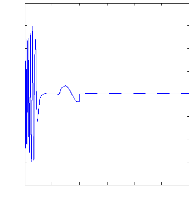
0 0.5 1 1.5 2 2.5 3
t(s)
0
irb o(A )
-1000
-1500
-2000
1500
1000
500
-500
2000
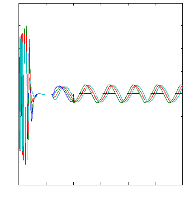
0 0.5 1 1.5 2 2.5 3
t(s)
irb (A )
-1000
-1500
-2000
2000
1500
1000
-500
500
0
Figure III.11 :courants dans les barres rotoriques Irb0 , Irb1
, Irb2 , Irb3,
simulation avec modèle global, machine en
défaut en charge, Cr=3.5N.m
2. Alimentation avec onduleur
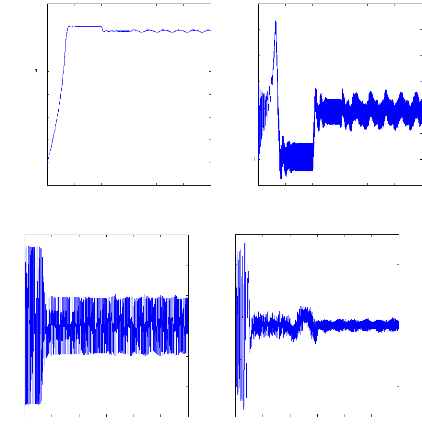
12
10
8
6
4
Cem(N.m)
2
0
-2
15
10
5
ia s(A )
-5
-10
-15
1500
1000
500
0
irb o IA )
-500
-1000
-1500
0 0.5 1 1.5 2 2.5 3
t(s )
0 0.5 1 1.5 2 2.5 3
t(s )
0 0.5 1 1.5 2 2.5 3
t(s )
0 0.5 1 1.5 2 2.5 3
t(s )
3500
3000
2500
000
500
000
k(trim n )
1
1
500
0
-500
Figure III.12 : Simulation avec le modèle réduit,
machine en défaut en charge , alimentation avec
onduleur
a- Cas d'une cassure de deux barres
1. Alimentation sans onduleur
On impose maintenant un couple de charge de 3.5 N.m à
t=0.6s et la machine opère alors en charge.
La figure III.13 illustre l'évolution temporelle en
régime transitoire et en régime permanent du couple
électromagnétique Cem en présence d'une rupture
de barre rb0 a t=1s et rb1 a t=2s. Aprés une phase transitoire, celui-ci
se stabilise a une valeur proche de 3.5 N. m a cause de la présence du
couple de charge. On constate des oscillations du couple
électromagnétique a la fréquence 2gfs0 en régime
permanent.
La figure III.14 illustre l'évolution temporelle en
régime transitoire et en régime permanent du courant statorique,
en présence d'une rupture de barre rb0 à t=1s et
rb1 a t=2s.
La figure III.1 5 illustre l'évolution temporelle en
régime transitoire et en régime permanent des courants de barres
Irb0 , Irb1 , Irb2 , Irb3 en
présence d'une rupture de barre rb1 à t=1 s. Les
courants circulant dans les barres adjacentes aux ban-es cassées sont
très supérieurs a leur valeur nominale. On conclut donc qu'il y a
un risque de défaillances en chacune dans la mesure ou les contraintes
électriques et thermiques sont redistribuées sur les conducteurs
adjacents.
Les effets de la cassure de barre (oscillation de ù et
Cem) croit rapidement avec le nombre de ban-es cassé ;
d'où on observe:
- Augmentation de l'amplitude des oscillations. La grande
amplitude des oscillations accélère la
détérioration de la machine.
- L'amplitude des courants des phases statoriques. est
proportionnelle au nombre de barres cassées.
- Lors des défauts rotoriques, les courants dans les
barres cassées chutent pratiquement zéro, tandis que les courants
dans les barres voisines deviennent déséquilibrés. Les
courants qui conduisaient les barres cassées se répartit alors
dans les barres voisines
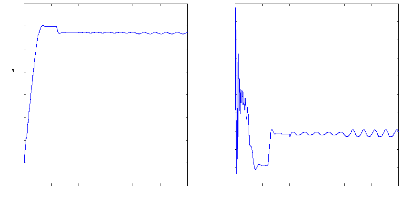
18
16
14
12
10
8
6
C em (11 .m )
4
2
0
-2
0 0.5 1 1.5 2 2.5 3
t(s )
0 0.5 1 1.5 2 2.5 3
t(s )
3500
3000
2500
000
500
000
II (trim II)
1
1
500
0
-500
Figure III.13 : vitesse de rotation, couple
électromagnétique, simulation avec le
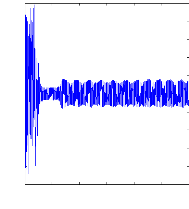
0 0.5 1 1.5 2 2.5 3
t(s )
ias(A )
-10
-15
-20
-25
25
20
15
10
-5
5
0
modèle réduit, machine en défaut en charge,
Cr=3.5 N.m
Figure III.14 : courant statorique, simulation avec le
modèle réduit, machine avec défaut
en
charge,Cr=3.54N.m
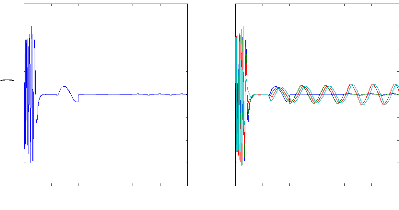
2000
1500
1000
500
0
irb (A )
-500
-1000
-1500
-2000
0 0.5 1 1.5 2 2.5 3
t(s )
0 0.5 1 1.5 2 2.5 3
t(s )
2000
1500
1000
500
-500
0
!rbotA
-1000
-1500
2000
Figure III.15 :courants dans les barres rotoriques Irb0 , Irb1 ,
Irb2 , Irb3 simulation avec modèle global, machine en défaut en
charge, Cr=3.5N.m
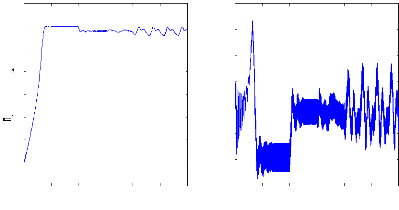
12
10
8
6
4
Cem(N.m )
2
0
-2
0 0.5 1 1.5 2 2.5 3
t(s )
0 0.5 1 1.5 2 2.5 3
1
t(s )
3500
3000
2500
000
500
(trim n )
1
000
500
0
-500
2. Alimentation avec onduleur
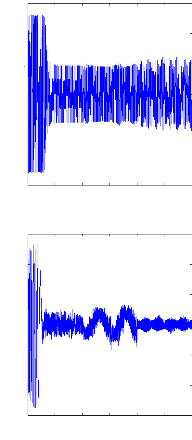
15
10
5
0
ias(A )
-5
-10
-15
0 0.5 1 1.5 2 2.5 3
t(s)
0 0.5 1 1.5 2 2.5 3
t(s)
irb1(A)
-1000
-1500
1500
1000
-500
500
0
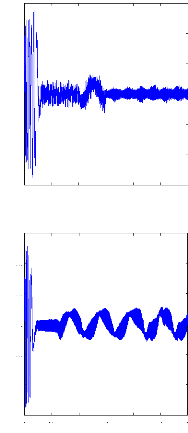
1500
1000
500
0
irboIA )
-500
-1000
-1500
0 0.5 1 1.5 2 2.5 3
t(s)
0 0.5 1 1.5 2 2.5 3
t(s)
irb3(A
-1000
-1500
1500
1000
-500
500
0
Figure III.16 : Simulation avec le modèle réduit,
machine en défaut et en charge ,
alimentation avec onduleur
III.3. Analyse spectrale de la signature du courant en
présence des défauts rotoriques [2]
[3]
Lors de la rupture de barre, il est difficile d'analyser
directement le courant statorique. Ce dernier ne présente en effet
qu'une petite modulation (figure III.3).
L'analyse par FFT permet de mettre en évidence les raies
présentées dans le spectre de signal. Nous présentons les
résultats de simulation relatifs à l'analyse par FFT en
régime permanent à charge nominal, dans les figures qui suivent
:
Frequency content of y
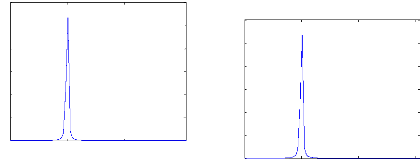
300
250
200
150
100
50
0
0 50 100 150
frequency (Hz>
0 50 100 150
300
250
200
150
100
50
0
Frequency content of y
frequency (Hz>
Figure III.17 : Moteur sain à vide Figure III.18 : Moteur
sain en charge
Frequency content of y
25 30 35 40 45 50 55 60 65 70
frequency (Hz>
Frequency content of y
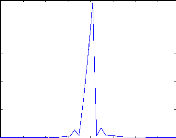
200
150
100
50
0 10 20 30 40 60 70 80
50
frequency (Hz>
Figure III.19 : Moteur avec une barre cassée Figure III.20
: Moteur avec deux barre
cassées
Les figures III.17 à III.20 présentent le spectre
de fréquence du courant autour de 50Hz.
Lors de la simulation du moteur sain, à vide et en charge,
nous n'observons aucune raie latérale figure III.17 et III.18.
Lorsqu'une barre est rompue, on remarque l'apparition des raies
latérales à 46 Hz et 54 Hz au voisinage du fondamental
fs = 50Hz, figure III.19.
Si on augmente le nombre de barres casées (K=0 ; K=1), on
obtient des valeurs importantes de l'amplitude des raies figure III.20.
Donc une analyse spectrale du courant statorique fait
apparaître les composantes latérales par rapport au fondamentale
à 46 Hz et 54 Hz correspondantes à la fréquence de
Deleroi fs (1 #177; 2.g) [10].
Ce résultat très important constitue une signature
fiable du défaut.
III.4 Conclusion
Dans ce chapitre, on a donc exploite la flexibilité du
modèle initial pour prendre en compte les défaillances rotoriques
pouvant affecter la machine asynchrone triphasée a cage
d'écureuil.
Nous avons simulé la machine asynchrone en premier lieu,
avec des défauts au rotor puis on a fait une analyse harmonique des
courants statoriques.
Nos simulations nous permettrons de conclure, que la cassure
de barres fait apparaître des oscillations sur le courant, le couple et
la vitesse. D'autre part ce défaut connaît un effet cumulatif lors
de la rupture de barre.
Une analyse harmonique des courants statorique permet de voir une
corrélation entre le défaut et les amplitudes des composantes
à fs (1 #177; 2 . g) .
On a montré que ce modèle pouvait répondre
aux objectifs fixés :
compréhension des phénomènes physiques
mis en jeu et prédiction de la dégradation des performances lors
de l'occurrence de défaillances, extraction et analyse des signatures de
défaillances.
Chapitre IV
Commande par flux orienté de la
machine asynchrone
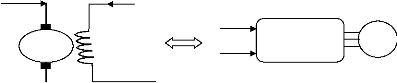
Bloc de
découplage
Ia If
Inducteur
Induit
ids
iqs
MAS
IV.1 Introduction
Le diagnostic de la machine asynchrone dans le cas de
commande, est devenu très important, à cause du
développement qui a connu le milieu industriel surtout pour les
entraînements électriques.
Dans ce chapitre, on va voir l'influence des défauts
rotoriques sur le contrôle à flux orienté de la machine
asynchrone.
La machine asynchrone est difficilement commandable. La
difficulté réside dans le fait que
son modèle mathématique dans le repère de
Park est non linéaire multivariables est fortement couplé.
Dans la machine asynchrone, le couple
électromagnétique et le résultat d'une interaction entre
les courants imposés dans les enroulements du stator et les courants
induits dans le rotor en court-circuit. Ainsi, toute variation du couple par
variation du courant statorique se traduit aussi par une évolution du
flux induit dans le rotor.
Pour obtenir un contrôle dynamique performant du couple, il
faut, par un système de commande extérieur à la machine,
réaliser un découplage entre le couple et le flux.
Ce découplage des armatures statorique et rotorique de
la machine est réalisé en appliquant la commande par flux
orienté (commande vectorielle). Cette dernière a
été proposée en 1971 par Blaschke. Elle consiste à
séparer la commande du flux de celle du couple par orientation du flux
selon l'axe directe du repère (d, q).
Nous nous proposons dans ce chapitre d'étudier le
comportement de la machine asynchrone en commande vectorielle lorsqu'il se
produit des ruptures de barres.
IV.2 Principe de la commande vectorielle
IV.2.1 Description
Le principe du découplage consiste à rendre le
contrôle de la machine asynchrone similaire à celui de la machine
à courant continu à excitation séparée; ceci peut
être réalisé en orientant le flux en quadrature avec le
couple (figure (IV.1)).
IV.2.2 Orientation du flux rotorique
On dissocie le courant statorique en deux composantes
ids et iqs en quadrature de telle sorte que le
courant ids soit orienté suivant l'axe du flux rotorique
(figure (IV.2)).
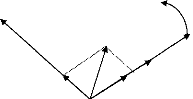
iqs
ids
ùs
q
d
is
Ör
Figure (IV.2): Orientation du flux rotorique.
Ainsi, en agissent sur les variables ids
et iqs , les grandeurs ö r et Cem
sont commandées séparément , cela se traduit par :
? ? ?
Ö = Ö
Ö
0
dr r (IV.1)
qr
Le modèle de la machine asynchrone avec orientation du
flux rotorique s'écrit :
d r
Ö Mi - Ö
ds
=
dt Tr
, r qs
C = Ö ,
em L r
pM i
i qs
ù = (IV.2)
sg T Ö
r
M
r
r
A flux rotorique constant, le couple dépend alors
uniquement du courant iqs.
IV.2.3 Bloc de découplage
En reprenant la description de la commande vectorielle par
orientation du flux rotorique sur l'axe (d) du repère lié au
champ tournant et en réécrivant le système
d'équation (IV.2) de la manière suivante :
|
ids = *
|
Ö*
r
1 d *
+ Ö
( T )
r r
M dt
|
*

iqs = *
L C
r em (IV.3)
pM Ö * r
*
ù =
sg
ÖT r r
*
i
M
qs

*
Ö *
r
Cem*


Lr
p M
.

M

Tr


÷
÷
Figure (IV.3) : Structure de commande par flux orienté
(CFO)
La figure (IV. 4) donne le schéma bloc de
découplage par orientation du flux rotorique. Nous réalisons la
commande découplée suivante :
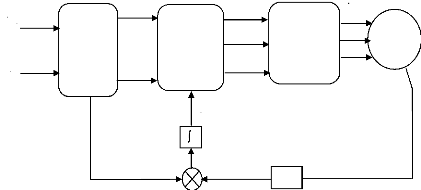
*
Ö
r
+ ùr
?
ibs
ias
ics
*
*
*
Onduleur de tension commandé en courant
ias
ibs
ics
MAS
ids
*
CFO
P-1 (ès *)
ès*
P
Cem *
ùsg* +
Figure (IV.4): Schéma de découplage par orientation
du flux rotorique
IV.3 Réglage de la vitesse par la méthode
indirecte
Concernant le réglage de vitesse, celui-ci est
donné par le schéma fonctionnel de régulation de la figure
(IV.5). Un régulateur de type PI a été rajouté au
montage de découplage de la figure (IV.4)
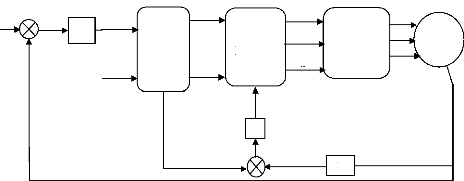
?*
+
-
PT
Cem *
Ö
*
r
CFO
ùsg *
Tqs *
Tds *
+
P-1 (ès*)
?
ès*
+
ùs *
ias *
ibs *
ics *
ùr
Onduleur de tension à hystérésis
P
?
ics
ibs
ias
MAS
Figure (TV.5): Schéma fonctionnel de régulation
de vitesse d'une machine
asynchrone commandée par la technique du
flux oriente (méthode indirecte)
IV.3.1 Synthèse du régulateur PI
Le régulateur de vitesse permet de déterminer le
couple de référence, afin de maintenir la vitesse de
référence correspondante.
L'équation mécanique donne:
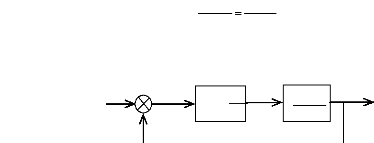
? ( ) 1
s
C s f Js
em ( ) +
En associant à cette fonction un régulateur PT, il
arrive:
e? (s)
-
Cem(s)
?
s
1
f + Js
?*
k p
? +
k i
?(s)
(TV.4)
Figure (TV.6): Schéma fonctionnel de régulation de
vitesse.
La fonction de transfert en boucle fermée, calculée
à partir du schéma précédent, est donnée
par:
(k p s k i ? + ? )
? ( )
s
1
J
(TV.5)
( )
s P s
( )
? *
L'équation caractéristique P(s) est:
f k
+ k
2 p ? i ?
P s s
( ) = + s + = (TV.6)
0
J J
En imposant toujours deux pôles complexes conjugués
s1 ,2 = ñ (-1 #177; j) , en boule fermée et,
par identification avec la nouvelle équation caractéristique
désirée, on arrive à:
k ? J ñ et k p
2
i 2
= ? = 2ñJ f
- (IV.7)
IV.4 Résultats de la simulation
Dans le but de valider l'influence des défauts
rotoriques sur le modèle réduit du schéma multi -
enroulement de la machine asynchrone a cage d'écureuil, nous avons
simulé ce schéma en commande indirecte de vitesse. Les
performances de la commande ont été évaluées pour
une machine saine ainsi en présence de défauts rotoriques
(ruptures de barres), pour une inversion du sens de rotation avec et sans
variations du couple de charge.
IV.4.1 Cas d'une machine saine
a- Machine saine à vide
Les paramètres du régulateur de vitesse
utilisé dans l'ensemble des simulations qui serons
présentées par la suite, sont calculés pour ñ=100.
L'algorithme de simulation est réalisé avec une période
d'échantillonnage de 0.5ms.
La figure (IV.7) représente les réponses de la
vitesse de rotation (n) et du couple électromagnétique
Cem, à une inversion du sens de rotation de 1000 tr/mn
à -1000 tr/mn. En absence d'un couple de charge, le couple se stabilise,
après un régime transitoire, à une faible valeur qui
compense les frottements.
Dans la simulation de la figure (IV.5) nous avons introduit un
filtre pour la référence dans le but de modérer l'impact
de sa variation brusque sur la réponse en vitesse de la machine ce qui
amorti la rapidité du réglage et limite le dépassement.
La fonction de transfert à prévoir dans notre cas
est donnée par :
( )
? * filtrée 1
= (IV.8)
? * (1 )
+ Tf S
La constante du temps Tf est calculée de façon
à compenser le zéro de la fonction de transfert par
rapport à la consigne donnée par l'équation
(IV.5). Donc p
T k
=
f
, des simulations ont montré
k
?
i ?
qu'il est judicieux de travailler avec une valeur de Tf trois
fois la valeur prévue, afin d'avoir des réponses de faibles
dépassements.
La figure (IV.9) illustre l'évolution temporelle, en
régime transitoire et en régime permanent, des courants de barres
rotoriques irb0 , irb1, irb2, irb3. Après le démarrage et en
absence d'un couple de charge, ces courants se stabilisent à des valeurs
proche de zéro.
II (trim n )
-1000
-1500
1500
1000
-500
500
0
0 0.5 1 1.5 2 2.5 3
-80
0 0.5 1 1.5 2 2.5 3
t(s )t(s)
a
C em (11 .m
-20
-40
-60
60
40
20
0
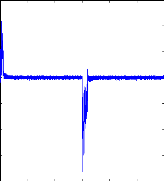
b
Figure (IV.7) : Réponses de la machine asynchrone saine
lors d'une inversion du sens
de rotation : a) vitesse de rotation et sa
référence , b) couple électromagnétique.
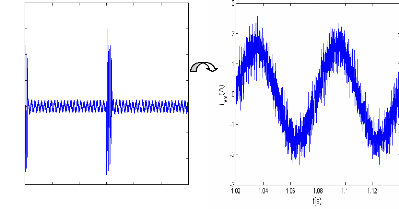
40
30
zoom
20
-10
-20
-30
0 0.5 1 1.5 2 2.5 3
t(s )
10
0
ias(A )
Figure (IV.8) : Courant de phase statorique.
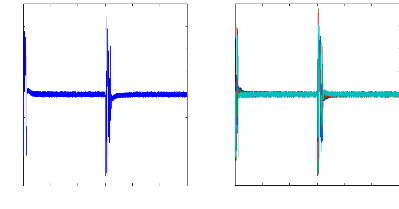
2000
1500
1000
-1000
-1500
-200 0
0 0.5 1 1.5 2 2.5 3
t(s ) t(s )
0 0.5 1 1.5 2 2.5 3
2000
1500
1000
500
0
irb0(A
-500
-1000
-1500
-200 0
500
0
irb (A )
-500
Figure (IV.9) : courants dans les barres rotoriques,
Irb0 , Irb1 , Irb2 , Irb3, simulation avec
modèle global, machine saine à vide
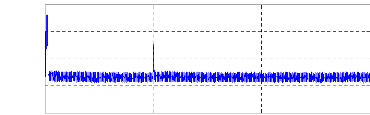
ids(A)
1 5
1 0
-5
5
0
0 0 .5 1 1 .5
t(s )
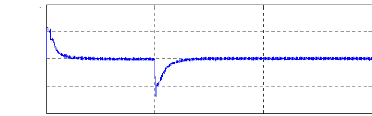
iqs(A)
-2 0
-4 0
4 0
2 0
0
0 0 .5 t(s ) 1 1 .5 Figure
(IV.10) : Découplage par orientation du flux rotorique.
b- Cas d'une machine saine en charge
Pour illustrer les performances du réglage, nous avons
simulé un démarrage à vide avec une application du couple
de charge (Cr=3.5Nm) à l'instants t = 0.5s, suivi d'une
inversion de la référence de vitesse entre #177;1000 tr/mn
à l'instant t=1.5s.
Les résultats obtenus sont regroupés sur les
figures (IV.11-12). Comme on peut le constater, ces
résultats
montrent que la commande vectorielle appliquée à la machine
asynchrone permet un
rejet de la perturbation et une bonne poursuite de la
référence. Toutefois, un pic de couple de
valeur importante apparaît lors de l'inversion de la
vitesse ce qui est néfaste pour le bon fonctionnement de la machine.
La figure (IV.13) présente les courants des quatre
premières barres rotoriques. En présence d'un couple de charge,
les courants rotoriques deviennent des ondes sinusoidales.
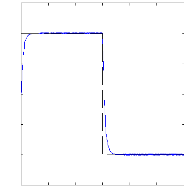
II (trim n )
-1000
-1500
1500
1000
-500
500
0
a
-
C en (11 .m )
-40
-60
-80
60
40
20
0
0
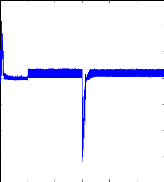
b
0 0.5 1 1.5 2 2.5 3
t(s )
0 0.5 1 1.5 2 2.5 3
t(s )
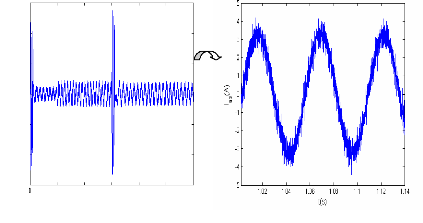
30
-10
-20
-30
0.5 1 1.5 2 2.5 3
t(s)
Figure (IV.12) : Courant de phase statorique d'une machine
asynchrone saine en charge.
zoom
0
ias(A )
20
10
Figure (IV.11) : Réponses de la machine asynchrone saine
en charge lors d'une inversion du sens
de rotation : a) vitesse de rotation
et sa référence , b) couple électromagnétique.
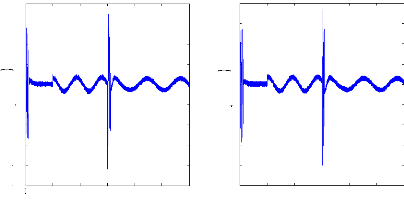
2000
1500
1000
500
0
00
-1000
-1500
-2000
-2500
0 0.5 1 1.5 2 2.5 3
t (s t (s
611A
-5
0.5 1 1.5 2 2.5 3
2000
1500
1000
500
0
irbo (A
-
500
-1000
-1500
2000
2500
Figure (IV.13) : courant dans la barre rotorique : Irb0 ,
Irb1
simulation avec modèle global, machine saine en charge,
Cr= 3.5 N.m
IV.4.2 Cas d'une machine avec défaut
On va voir la régulation de la vitesse, dans le cas des
défauts, ou on simule la rupture d'une barre, et aussi la rupture de
deux barres.
a- Cas d'une rupture d'une barre
0 0.5 1 1.5 2 2.5 3
t(s )
0 0.5 1 1.5 2 2.5 3
t(s )
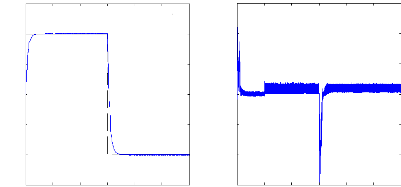
Cem(N.m)
-20
-40
-60
60
40
20
0
b
II (trim n)
-1000
-1500
1500
1000
-500
500
0
a
Figure (IV.14) : Réponses de la machine asynchrone en
charge avec un défaut lors d'une
inversion du sens de rotation : a)
vitesse de rotation et sa référence , b)
couple
électromagnétique.
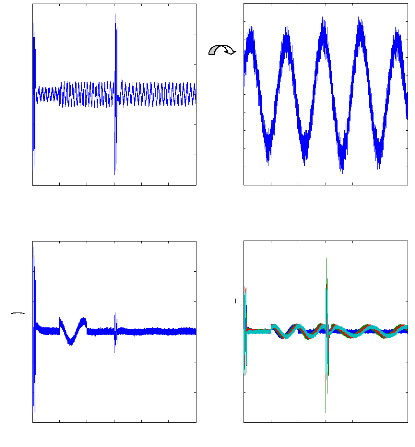
t(s )
t(s )
1500
1000
500
0
irboIA
-500
-1000
-1500
Figure (IV.15) : Courant de phase statorique, machine en
défaut, en charge Cr= 3.5Nm
0 0.5 1
t(s )1.5 2 2.5 3
0 0.5 1 1.5 2 2.5 3
t(s )
30
20
10
0
ias(A )
-10
-20
-30
0 0.5 1 1.5 2 2.5 3
1 1.05 1.1 1.15 1.2 1.25 1.3
5
4
zoom
3
2
0
ias(A )
-1
-2
-3
-4
-5
3000
2000
00
0
-1000
irb 0 ,1 ,2 ,3 (A--)
10
-2000
-3000
Figure (IV.16) : Courants dans les barres rotoriques : Irb0 ,
Irb1 , Irb2 , Irb3 machine en défaut,
simulation avec modèle global, rupture de la barre rb0
à t= 1s
b- Cas d'une rupture de deux barres
II (trim n )
-1000
-1500
1500
1000
-500
500
0
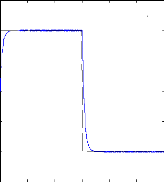
a
0 0.5 1 1.5 2 2.5 3
t(s )
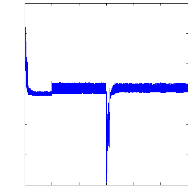
C em (11 .m )
-20
-40
-60
60
40
20
0
b
0 0.5 1 1.5 2 2.5 3
t(s)
Figure (IV.17) : Réponses de la machine asynchrone en
charge avec un défaut lors d'une
inversion du sens de rotation : a)
vitesse de rotation et sa référence , b)
couple
électromagnétique
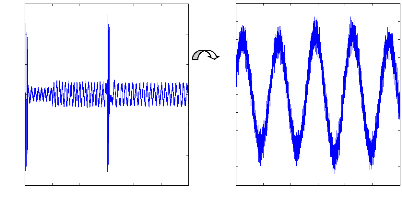
0 0.5 1 1.5 2 2.5 3
t(s)
1 1.05 1.1 1.15 1.2 1.25 1.3
t(s )
ias(A )
-10
-20
-30
30
20
10
0
-1
-2
-3
-4
-5
5
4
3
2
0
1
zoom
ias(A )
Figure (IV.18) : Courant de phase statorique, machine en charge
et en défauts, 2 barres cassées
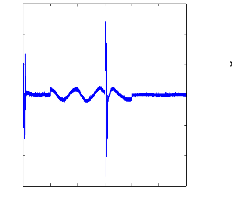
0 0 .5 1 1 .5 2 2 .5 3
t(s )
irb1(A
-1 0 0 0
-2 0 0 0
-3 0 0 0
3 0 0 0
2 0 0 0
1 0 0 0
0
1 0 0
irb0,1,2,3(A--)
-1000
-200 0
-3000
3 0 0 0
2 0 0 0
0
0
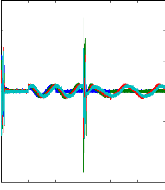
0 0.5 1 1.5 2 2.5 3
t(s)
Figure (IV.19) : courants dans les barres rotoriques : Irb0 ,
Irb1 , Irb2 , Irb3
Machine en charge et en
défaut, simulation avec modèle global : 1 barre cassée
rb0 à t=1s, 2
barre cassée rb1 à
t=2s
Nous avons simulé dans la figure (IV.17) une inversion du
sens de rotation de +1000 tr/mn à -1000 tr/mn. Ce changement du sens de
rotation se déroule à couple maximal et le temps d'inversion en
charge est de l'ordre de 0.3 s.
La figure (IV.17) représente l'évolution du couple
et la vitesse, quand la référence de vitesse est un
échelon d'amplitude 1000 tr/mn. Le temps de réponse de la vitesse
est de l'ordre de 0.2 s, Un échelon de couple de 3.5 N.m est
appliqué à t=0.4s. Le régime ainsi établi, nous
procédons à la simulation d'une première rupture de barre
par une augmentation de 11 fois la résistance de cette barre.
Après un régime transitoire très bref, la deuxième
barre est cassée à t=2s.La vitesse reste toujours peu
perturbée par ce défaut.
Le régulateur de vitesse adopté doit avoir un
comportement satisfaisant sur toute la plage de vitesse de 0 à 1000
tr/mn et doit satisfaire le plus possible aux exigences suivantes
- rapidité de réponse
- dépassement nul ou faible (< 10%)
- erreur statique nulle en régime permanent
- robustesse aux variations paramétriques
Dans la figure (IV.18), nous observons une déformation au
niveau du courant statorique , lors des cassures de barres.
La figure (IV.19) montre les courants dans les barres rotoriques
Irb0 , Irb1 , Irb2 , Irb3 , ou on
voit que irb0 s'annule a cause de la cassure de barre rb0
à t=1s, et pour rb1 à t=2s, pour irb2
et irb3, on remarque une déformation dans les allures.
C- Cas d'une variation de charge
Les simulations reportées sur les figures (IV.20),
(IV.21) concernent un démarrage en charge de la MAS pour une
référence de vitesse de 0 à 1000 tr/mn avec variation du
couple de charge en régime établi suivi de l'inversion du sens de
rotation entre #177;1000tr/mn à t =1.5 s.
Pour 0.6s<t<3s, on applique un couple de charge de 3.5N.m
;
A l'instant t=2s, on applique un couple de charge
Cr=5.5N.m.
Ces résultats montrent que la commande vectorielle
indirecte appliquée à la machine asynchrone présentent des
performances fort intéressantes.
Lors changement brutal de la consigne, le régulateur PI
se trouve soumis à un écart de réglage très
important. La réaction de l'action proportionnelle, dont le but est de
réduire l'écart, risque de provoquer un grand
dépassement.
0 0.5 1 1.5 2 2.5 3
t(s )
0 0.5 1 1.5 2 2.5 3
t(s )
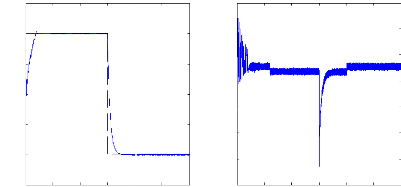
C em (11 .m )
-10
-20
-30
-40
30
20
10
0
b
II (trim n )
-1000
-1500
1500
1000
-500
500
0
a
Figure (IV.20) : Réponses de la machine asynchrone avec
variation de la charge lors d'une
inversion du sens de rotation : a) vitesse
de rotation et sa référence , b)
couple
électromagnétique
zoom
ias(A )
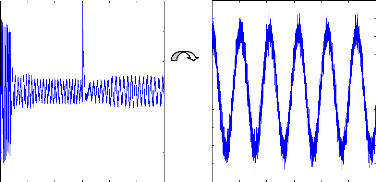
30 20 10 0
ias(A )
-10
-20
-30
0.5 1 1.5 2 2.5 3
t(s ) 5 4 3 2 1
0
-1
-2
-3
-4
-5
1 1.05 1.1 1.15 1.2 1.25 1.3
t(s )
Figure (IV.21) : Courant de phase statorique, variation de la
charge
IV.5Conclusion
La méthode du flux orienté appliquée sur
le modèle multi-enroulements de la machine asynchrone a cage
d'écureuil moyennant un réglage classique, nous a permis de
simuler le système, avec ou sans défauts rotoriques.
Les résultats obtenus montre l'influence des ruptures
de barres sur le couple électromagnétique, la vitesse de rotation
et le courant statorique, se traduit par des ondulations et déformations
des allures.
Il faut signaler que le régulateur P.I ne permet pas en
tout cas de maîtriser le régime transitoire. En outre, la
faiblesse de la commande vectorielle, se traduit par l'apparition d'une pointe
de courant très gênante pour le bon fonctionnement de la machine.
C'est les raisons pour lesquelles nous consacrons un chapitre pour
l'application d'un régulateur flou.
On s'intéresse dans ce qui suit à l'estimation des
états de la machine asynchrone par le filtre de kalman étendu,
afin de détecter les défauts rotoriques.
Chapitre v
Estimation des paramètres de la
machine asynchrone par le filtre de
Kalman Etendu en vu de détection des
défauts rotoriques
V.1 Introduction
Le diagnostic de défaut des machines électriques
gagne l'importance particulière en raison des pertes de temps
d'arrêt et de revenu de machine à l'industrie. Souvent, ces
machines courent les charges critiques et leur panne soudaine peut être
catastrophique. Ainsi, le système d'entraînement du moteur devrait
également avoir les dispositifs diagnostiques pour prévoir des
défauts de machine à leur commencement même. En
conséquence, il devient très important d'avoir des modèles
de machine et de commander les techniques qui peuvent distinguer l'état
sain et défectueux des machines. [26]
Dans le domaine de l'estimation des paramètres des
machines électriques a courants alternatifs, beaucoup des
méthodes ont été proposées. Selon les
considérations sur les différentes perturbations, ces
méthodes peuvent être déterministes ou stochastiques. Les
premières ne font pas d'hypothèse sur les
propriétés des bruits, tandis que les secondes tiennent compte
des bruits de perturbation du système.
Parmi Les méthodes stochastiques, nous avons, le
filtrage de Kalman. Un cas particulier de cette méthode est le Filtre de
Kalman Etendu. Il est approprie pour le traitement des mesures bruitées
discrètes et pour obtenir des estimes précis des variables
d'état et des paramètres du modèle. La façon
générale dont il le fait consiste a utiliser les facteurs
suivants :
-Une connaissance de la dynamique du système et des
mesures.
-La description statistique des bruits du système, des
perturbations, des erreurs de mesure et des incertitudes du modèle du
système.
- Une information sur les conditions initiales des variables
d'intérêt.
Afin d'évaluer ce type de méthode sur un exemple
simple représentatif, nous présentons dans ce chapitre,
l'algorithme d'estimation en ligne basé sur le filtre de Kalman
étendu, pour l'estimation des paramètres de la machine asynchrone
en vu de détection des défauts rotoriques.
L'algorithme est vérifie par simulation. On
considère une machine asynchrone avec son modèle
multi-enroulements. Les variables mesurables sont les courants de phase, les
tensions de phase et la vitesse du rotor.
V.2 Modèle discret de la machine
asynchrone
L'estimation des variables d'état pour la
détection des défauts a besoin d'un modèle dynamique
multi-enroulements adéquat de la machine asynchrone. Le modèle
réduit est obtenu en utilisant la transformation de PARK. Ce
modèle pose les hypothèses habituelles décrites au
chapitre II.
Le filtre de Kalman nécessite un modèle discret de
la machine qui se déduit du modèle continu.
La représentation de la dynamique de la machine, avec un
repère lie au rotor, est donnée par les équations
suivantes :
dÖ ds
VR . I
= + ù . ö
ds s qs (V.1)
s ds dt
-
dÖ qs
V R . I
= + ù . ö
qs s ds (V.2)
s qs dt -
dödr
0 = . +
R I (V.3)
r dr dt
d ö qr
0 = . +
R I (V.4)
dt
r qr
En choisissant ids, iqs, idr,
iqr,Ie comme variables d'état du modèle réduit
du shéma multienroulements de la machine asynchrone, la
représentation en espace d'état est :
x& = A . x ( t ) +
B .u ( t )
( ) = ( ) ( ) ( ) ( ) ( )
[ ] T
x t ids t iqs
t idr t iqr t ie t
(V.5)
(V.6)
u ( t ) = [ Vds Vqs 0
0]T (V.7)
Le courants stator, étant choisis comme mesures pour
compléter le modèle d'espace d'état, l'équation de
sortie est :
z ( t ) = h[ x (t ),
t] (V.8)
Oil : h = [ ids iqs] (V.9)
Le modèle déterministe devient :

a14
-a 11 a12 .w - a13S1
-
0 0
0 0
a3
S 1 a4
- a6 . w -
a7 a 8 a9 .
S1
a16 . w a17 - a 18 -
a19 . S1
? ?
?i
? ?
?i
Le ? ?
ÿ ? I e ÿ
0
0 Ò
?
0 Ò
?
0 Ò
?
? ? i ds
qs Ò
? i Ò
dr
qr Ò
1 ? ? ? ? ?
i
i ds
d
i qs
dt
i dr
i qr
Ie
1 ?
?
?
?
?
i
0
1 ?
?
?
?
?
?i
a10
V
ds
Vqs
a5
0
0
(V.10)
+
0
a15
0
-
0
a20
0
0 0
- a a w - 2 .
1
Oil :
a 1 = a7 = 4 . m1 .
Lrc .Rs
a 2 = a6 = 4 .
m1 . Lrc . Lrc
a 3 = a9 = 2 .
m1 . Msr .Nr
a 4 = (Lrc .ù -
S2) .2 . m1 . M sr N
r
.
a 5 = a10 = 4 .
m1 . L rc
a 8 = (Lrc .ù +
S3) .2 . m1 . M sr
. Nr
a11 = a17 = 6 . m1 . Msr
. Rs
a 12 = a16 = 6 .
m1 . M sr . L sc
a 13 = a
|
?
( M N ) ?
1 ?
= 1 .
3 . 2 . + ?
19 sr r ? L
rc ?
|
|
1
( ( ù 3 ) ) ?
? ?
a S M N S
2
= 3 . .
m L
- + . . - . ?
14 1 rc . sr 2
r ? L rc ?
a 15 = a20 = 6 .
m1 . M sr
?
( ( ù 2 ) ) ?
1 ?
S M N S
2
a m L
= 3 . . . + . . - . ?
18 1 rc sr r 2 ?
L
rc ?
1
m1 = ( -3. M
sr2 . N r + 4. Lrc.L
sc)
Et :
S 1 = 12 6 [( r
NR b 0 + R b15 )cos2
Oa +l ( N ux, b14
)cos2 15á
2 e +R 2 R e r
+ Rbl #177; Rb0
)cos2 1a + .-P (2 R
e r #177; R,, + R Ò 1
J
14 rf
- RR b° cos0 á
cos1á) + (Rb1 cos 1
á cos 2á) +
·
·
· +
(Rb15 cos15á cos0á)] (V.11)
6
i
? _I
S 2 = - 2 6 r r
[(2 R e + A0 +
g15 )cos0 á sin0 á -(2 R
e +R + A,0 jcos1 á sin1
á (2 R e + g15
+Rb14)cos1 5ásin1
N Nr
2 rf
+ 6 RR b 0 sin 0 á cos
1á ) + (Rb1 sin 1
á cos 2á ) +
·
·
· +
(Rb15sin15á cos
0á )]
ri
+ 6 RR b° cos 0
á sin 1á) + (Rb1
cos 1 á sin 2á ) +
·
·
· + (Rb15 cos 15á sin 0á)]
(V.12)
1
Oil : S1,S2, représente les résistances
équivalentes des barres rotoriques
Le modèle mathématique discret peut être
dérivé de l'équation d'état
(V.10). Nous avons
Dans ces équations, A et B sont les matrices du
modèle continu et AD, BD sont les matrices correspondants du
modèle discret. k représente les instants
discrétisés du temps et Te est la période
d'échantillonnage.
Alors, le modèle discret de la machine est décrit
par l'équation :
x (k 1) [ 1 . ] . ( ) . . ( )
+ = + e
A T x k T B u k
+ e (V.13)
On considère que la vitesse est constante pendant les
instants d'échantillonnage.
V.2.1 Modèle Discret Augmenté
La matrice A varie avec le temps aux éléments qui
dépendent de la vitesse rotorique.
Lorsqu'un paramètre, dans ce cas les résistances
équivalentes S1, S2 , sont inconnues, une
autre équation doit être ajoutée au modèle de la
machine; l'équation d'état n'est alors plus linéaire.
Pour estimer les résistances équivalentes, nous
introduisons les équations :
S1 (k + 1 ) = S1(k)
S2(k+1) = S2(k)
Cette équation est basée sur I'hypothèse
que les résistances équivalentes ne varies pas pendant
l'intervalle d'estimation.
Le modèle complet de la machine est, donc :
[
I

1 1
x(k) BD(k)
0 0
.[ Vs ( k)]
S 1 ( k + 1) = [ 0 1
0.[S 1 (k ) J
+
(V.14)
x( k + 0
S 2 ( k +1) j
0 0 1_1 S2 (k) i 0
1)AD(k)
Le nouveau vecteur d'état, xn,
est :
i sd ( k
i qs (k
idr ( k
i qr (k
Ie(k
S 1(k
S 2(k
1
i
+
1)
+
1)
+
1)
+
1)
+
1)
+
1)
+
1)
x(k) 1
x n ( k) = S1
(k ) =[ i ds (k ) i
qs (k ) i dr (k ) i
qr (k ) Ie(k ) S 1
(k ) S2 (O]T
S2(k) j
Le modèle discret augmenté est
1 ? ? ? ? ? ? ? ?
?i
a3 . S 1 . Te
a4 .Te 0 0 0
a8 .Te a9 . S
1 .Te 0 0 0
a14 .Te 0 0 0
a17 .Te -
a18 . Te 1- a19 . S
1 0 0 0
1 -Te.a 1 a.
2 w . Te -
-
a7 .Te
.
w. Te
a6 .Te. w 1-
-
a11. Te a12
1 - a S Te
. . -
13 1
a16. w.Te
0 0 0
0 0 0
0 0 0
0 Le.Te 0 0
0 0 1 0
0 0 0 1
a

0
15
? ?? V ds
+ 0 - a .
? 20 Ò ? Ò
? V qs
? ?

0 0
?? ?

?
0 0
?? ?
0 0
J
?
L'équation de sortie est :
|
z ( k) = [i .ds (k)
1 qs (k)
|
1
_1
|
(V.16)
(V.17)
|
V.2.2 Modèle Stochastique
Dans la pratique, la machine asynchrone ne peut pas être
modélise de manière parfaite. Ceci est du aux hypothèses
faites dans le modèle dynamique et a des erreurs qui se
présentent dans
les mesures, les filtres, les capteurs, etc. L'utilisation des
approximations faites augmente les erreurs par rapport aux valeurs des courants
statoriques . Nous considérerons toutes ces erreurs ou incertitudes
comme du bruit présent sur les mesures et sur la structure du
modèle. Nous supposons dans notre étude que le bruit peut
être approximé par la loi de distribution gaussienne. Le nouveau
modèle, connu comme un estimateur stochastique est :
z ( k ) =
h(k)+v(k) (V.19)
Où :
w k wi k wi k wi k wi k wI wS wS
( ) = ( ) ( ) ( ) ( )
[ ]T (V.20)
ds qs dr qr e 1 2
v k vi ds k vi qs k
( ) = ( ) ( ) 0 0
[ ]T (V.21)
Le bruit du système w(k) est caractérise par
E{ w( k ) } = 0 (V.22)
E{ w( k ) . w( j )
T } = Q.äkj (V.23)
Q = 0 (V.24)
Le bruit des mesures v(k) est caractérise
par
E{ v ( k ) } = 0 (V.25)
E{ v ( k ) . v ( j )
T } = R.äkj (V.26)
R = 0 (V.27)
Où Q est la covariance de I'erreur du
modèle et R est la covariance de l'erreur de mesure. L'état
initial est caractérise par :
E{ x (0) } = xà0
(V.28)
|
? ?
E x
? ( (0) à 0 ) . ( (0) à 0 ) 0
x x - x T = P
??
-
?L ??
Ou E[ ] représente l'opérateur d'espérance
mathématique.
|
(V.29)
|
V.3 Filtre de Kalman Etendu (EKF)
Le filtre de Kalman (KF Kalman Filter) est une technique
d'estimation linéaire. Elle ne peut être utilise pour l'estimation
des variables d'état et des paramètres d'un système non
linéaire a
moins que le modèle du système soit
linearisé autour d'un point de fonctionnement. Cette procédure de
linéarisation est connue comme le filtre de Kalman étendu (EKF
Extended Kalman Filter). Alors, l'algorithme du filtre de Kalman conventionnel
peut titre utilise pour estimer simultanément les états du
système et les paramètres de la machine de manière
simultanée. Le filtre a une structure de prédicteur - correcteur,
décrite par la suite:
V.3.1 Prédiction
L'état a l'instant (k+1) dépend
non seulement de l'état a l'instant (k), mais aussi de l'erreur du
modèle w(k). Etant donné que ces
erreurs sont inconnues, la connaissance du modèle mathématique
peut nous donner seulement la prédiction de l'état a l'instant
(k+ 1).
Donc,
x ( + 1 ) =
k f [ x n e k u k k ]
( ), ( ), (V.30)
n p
ou : xne(k) est la valeur
estimée de l'état a l'instant (k) que l'on suppose connue,
xnp(k+ 1) est la prédiction de l'état a l'instant (k+
1).
Alors, la prédiction est donnée par l'expression
suivante :
? AD k
( ) 0 ? BD k
( )
x k
( 1 )
+ = . ( )
x k + . [ ( ) ]
V k
n p n e s
?? (V.31)
0 1 Òÿ ?? 0 Òÿ
V.3.2 Estimation
Les estimées xne(k) peuvent être
obtenues de manière récursive en utilisant les mesures pour
améliorer les variables prédîtes
xnp(k). La correction aux
prédictions est proportionnelle aux résidus des mesures :
x n e ( k + 1) = x nP
(k + 1) + K( k + 1) [ z( k + 1)
- H . x nP( k + 1) ] (V.32)
K(k+1) est la matrice de gain de Kalman
[ z ( k + 1) - H .x n P
(k + 1)] est le vecteur d'innovation, et
|
H
|
?li[
|
x n(k ),k ]
|
(V.33)
|
|
?xn
|
Pour le choix de la matrice de Kalman K(k+1), nous devons
définir les erreurs d'estimation ee et de prédiction
ep respectivement :
e e ( k + 1) = x
e ( k + 1) - x n ( k + 1)
(V.34)
e P ( k+ 1)= x
np ( k + 1) - xn( k + 1)
(V.35)
Ses matrices de covariance associées sont :
P P ( k + 1) = E [ e
P ( k + 1) . e P ( k + 1)
T ] (V.36)
P e ( k + 1) = E[ e
e ( k + 1) . e e ( k +
1)T ] (V.37)
Donc, la matrice de covariance de I'erreur d'estimation
Pe, devient :
P k [ ] [ ] T T
+ = -
I K k H P k I K k H K k R K k (V.38)
e ( 1) ( 1) . ( 1) ( 1)
+ + - + + +
( 1) . . ( 1)
+
P
ou R est la covariance de I'erreur de mesure, définie par
(V.26).
Il est possible de choisir la matrice de gain K(k+1) de
manière a minimiser les variances des erreurs d'estimation des
éléments du vecteur d'état qui est estimé. Dans ce
cas la K(k+1) est appelée matrice de gain de Kalman. Alors
?trace { P( k + 1) } = 0
? K ( k +1
(V.39)
)
nous obtenons ainsi la matrice de gain de Kalman :
T T
[ ]1
-
K k P k H HP k H R
( 1) ( 1) . . ( 1) .
+ = + + + (V.40)
P P
Avec cette expression, nous avons la matrice de covariance de
l'erreur d'estimation :
P k
( 1 ) [ ( 1 ) ] . ( 1 )
+ = -
I K k H P k
+ + (V.41)
e P
Le calcul de K(k+ I) et de Pe (k + I ) a besoin de la
matrice de covariance Pp(k+1), donc :
P k
( 1) ( ) . ( ) . ( ) ( )
+ = F k P k F k Q k
T + (V.42)
P e
Où :
|
? f
|
{ x k u k k
( ) , ( ), } {
? f x k u k k
( ) , ( ) , }
n n
|
? S ? S
1 2
1 0
= x k
( )
ne ? 0 0 1
F k
( )
? x k
n ( )
x k n ( )
1
?
?
?
?
? ]
(V.43)
{ x k u k k }
n ( ) , ( ) ,
? f
AD k
( )
0
et Q(k) est la covariance de l'erreur du modèle,
défini par (V.23) et calculée de la manière suivante :
tk + 1
Q k
( ) = ? ö ( 1 , ) ( ) ( 1 , )
tk + ô ô ö
Q T tk + ô d ô (V.44)
tk
ou Ô( t k +1.,ô ) est la matrice de
transition associé a F(T ,xn(z )) pour z E [k,k + I ]
. Ensuite, Q(k) est calculée par
intégration trapézoïdal :
Q k
( ) ( 1, ) . . ( 1, )
= ö +
[ k k Q k k Q
T + ] T 2 e
. (V.45
0 ö + 0
V.3.3 Calcul de F(k) et H(k) ? h x k
k
[ ] r 1 0 0 0 0
n ( ),
H = = (V.46)
?L ?]
? x 0 1 0 0 0
n
? AD k
( ) F k F k
1 ( ) ( ) 1
5
? ?
F k F k
6 Ò
? 2 ( ) ( )
( ) ( ) Ò
3 7
? F k F k
F k
( ) = ? ? (V.47)
F k F k
( ) ( )
? 4 8 Ò
? 0 1 1 Ò
?? ??
? ?
où :
|
? di ds
F k
1 ( ) =
? S 1
|
? di qs
, F k
2 ( ) =
? S 1
|
? di dr
, F k
3 ( ) =
? S 1
|
? di qr
, F k
4 ( ) =
? S 1
|
, (V.48)
|
? di ds
F k
5 ( ) =
? S 2
? di qs
, F k
6 ( ) =
? S 2
? di dr
, 7 ( ) =
F k
? S 2
? di qr
(V.49)
, F k
8 ( ) =
?S2
|
Valeurs initiales de :
- Vecteur d'état xn0=xn(t0)
- Matrices de covariance Q=Q0
R=R0
P0=P(t0)
Prediction du vecteur d'état x np (
k + 1) = f[x ne( k ), u
( k ), k ]
|
?f(xn
Linéarisation du mdèle augmenté F (
k) =[AD(k)
0 ? n ?S2
1
Calcul de la matrice de covariance p ( k 1)
F ( k ) p ( k ) F ( k )
T Q ( k )
+ = +
p e
d'état
Calcul de la matrice de gain de Kalman [
T ]1
-
K k
( 1) ( 1) .
+ = P k H HP k H R
T
+ . ( 1) .
+ +
P P
Estimation xn e ( k + 1) =
xn P ( k + 1) + K ( k + 1) [
z ( k + 1) - H . xn P (
k + 1) ] du vecteur d'état
Calcul de la matrice de covariance ( 1 ) [ ( 1 ) ] . ( 1 )
P k + = -
I K k H P k
+ +
e P
De l'erreur d'estimation
Retour à la prédiction
xne(k)=xne(k+1)
Pe(k) = Pe(k+1) k=k+1
I
i


( ), u ( k ), k)k
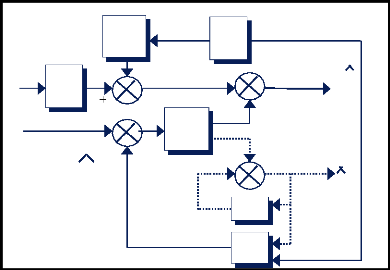
u(k)
1)
AD
1
-
q
+
+
X(k+1)
BD
+
+
K(k+1)
+
-
+
Z(k+1)
e(k+1)
AD
H
k)
X(k+1)
Tableau (V.1) : Algorithme du filtre de Kalman Etendu
V.3.4 Mesures
Le vecteur des mesures h(k) = [ids( k) iqs(k)] est
obtenu à partir des mesures des courants de ligne.
V.4 Application du filtre de Kalman Etendu a la machine
asynchrone
L'algorithme décrit ci-dessus est appliqué a
l'étude par simulation de l'estimation des paramètres d'une
machine asynchrone. Le schéma de la configuration du système est
sur la figure (V.2).
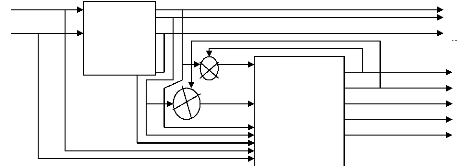
Vqs
Vds
réduit
Modèle de la M.AS
Filtre
De
Kalman
Etendu
Ids
Iqs
ù
Îds
Îqs
Îdr
Îqr
S1
Figure (V.2) : schéma de configuration du modèle
pour l'estimation
V.5 Résultats de simulation
V.5.1 Suivi des courants
a- Machine Saine à vide
La simulation est faite pour un temps de 1.5s.
La figure (V.3) présente la variation de la vitesse, le
couple en absence du couple de charge. La figure (V.4) illustre le courant
statorique en absence de la charge. La figure (V.5) montre la convergence des
courants estimés vers les courants réels pour les courants. Les
valeurs des courants se stabilisent à des valeurs proches de
zéro, a cause de l'absence du couple de charge.
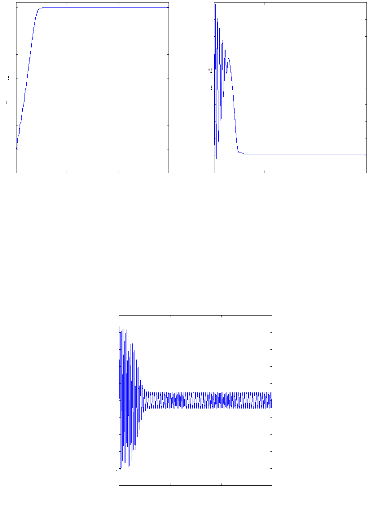
las(A)
0
0 0.5 1 1.5
t(s)
1
1
Q (trim rtJ
3000
2500
2000
-500
000
500
00
0
0 0.5 1 1.5
t(s)
1
Cem(N.rn)
18
16
14
12
-2
6
4
2
0
Figure (V.3) : la vitesse de rotation, le couple ,
machine
saine à vide
25
20
15
10
5
-5
-10
-15
-2 0
0 0.5 t(s) 1 1.5
Figure (V.4 ) : courant statorique, machine saine à
vide
-25
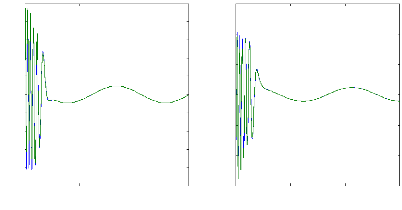
0 0.5 1 1.5
t(s )
0 0.5 1 1.5
t(s )
25
20
15
10
5
0
-5
-10
id s sE s e (A )
-15
-20
-25
30
20
10
0
10
iqs!iqS E stim )
-
-20
-30
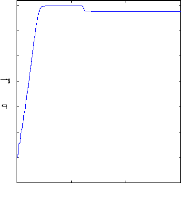
3000
2500
2000
00
(trim n_
000
500
0
-500
0 0.5 1 1.5
t(s)
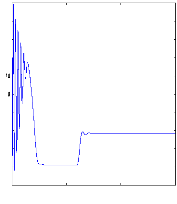
0 0.5 1 1.5
t(s)
Cem(N.rn)
18
16
14
12
-2
6
4
2
0
Figure (V.5) : courants et courants estimés:
ids et
Ids_estimé, iqs et
iqs_estimé, machine saine à vide
b- Machine saine en charge
On simule maintenant avec un couple de charge de 3.5N.m, alors la
machine opère en charge.
On voit, d'après la figures (V.8), La comparaison du
courant mesuré et estimé montre la bonne convergence du
filtre.
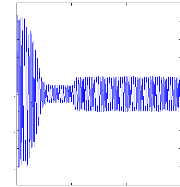
las (A
-1 0
-1 5
-2 0
-2 5
2 5
2 0
1 5
1 0
-5
5
0
0 0 .5 1 1 .5
t(s )
Figure (V.7) : courant statorique, machine saine en charge
Cr=3.5 N.m
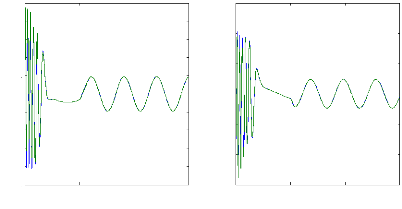
0 0 .5 1 1 .5
t(s )
0 0.5 1 1.5
t(s)
2 5
2 0
1 5
1 0
5
0
-5
-1 0
ids sE stim e (A)
-1 5
-2 0
-2 5
3 0
2 0
1 0
0
1 0
-
iqs!iqSE stim a )
-20
-30
Figure (V.8) : courants et courants estimés : ids
et
Ids_estimé, iqs et iqs_estimé,
machine saine en charge
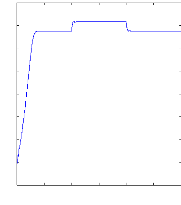
0 0.5 1 1.5 2 2.5 3
t(s)
1
n(trLm n)
3500
3000
2500
2000
1000
-500
500
500
0
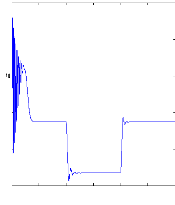
0 0.5 1 1.5 2 2.5 3
t(s)
1
Cem(N.rn)
20
15
-5
5
0
Figure (V.9) : vitesse, le couple et le courant statorique,
machine saine lors
d'une variation de charge.
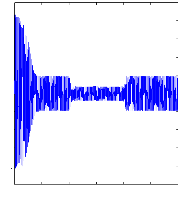
0 0.5 1 1.5 2 2.5 3
t(s)
las(A)
-2 0
-25
-10
-15
25
20
15
10
-5
5
0
Figure (V.10) : courant statorique lors de variation de charge
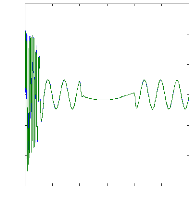
0 0.5 1 1.5 2 2.5 3
t(s)
-
iqs!iqS E stim )
-20
-30
3 0
2 0
1 0
1 0
0
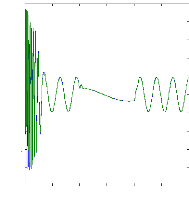
0 0.5 1 1.5 2 2.5 3
t(s)
id sE stim e (A)
-10
-15
-20
-25
25
20
15
10
-5
5
0
Figure (V.11) : courants et courants estimés:
ids et
Ids_estimé, iqs et
iqs_estimé,lors de variation de la charge
c- Machine avec défaut
1. cas d'une cassure de barre
Vu la difficulté de voir les défaut à vide,
on va simuler la machine en charge avec cassure de barre.
La figure (V.12) illustre l'évolution temporelle en
régime transitoire et en régime permanent de la vitesse de
rotation, celle-ci se stabilise a une valeur de 2219 tr/mn. La figure illustre
aussi du couple électromagnétique Cem en présence d'une
rupture des barres rb0 à t=1s. Aprés une phase
transitoire, celui-ci se stabilise a une valeur proche de 3.5 N. m a cause de
la présence du couple de charge.
La figure (V.13) illustre l'évolution temporelle en
régime transitoire et en régime permanent du courant statorique
en présence d'une rupture de barre rb0 à t=1s .
La figure (V.15) illustre l'évolution temporelle en
régime transitoire et en régime permanent des courants
ids , idr, avec leurs courant estimés en
présence d'une rupture de barre rb0 à t=1s. Les
courants circulant dans les barres adjacentes aux barres cassées sont
très supérieurs a leur valeur nominale. La comparaison du courant
mesuré et estimé montre la bonne convergence du filtre.
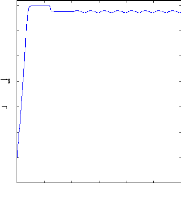
0 0.5 1 1.5 2 2.5 3
t(s)
1
1
R (trim n_
3000
2500
2000
-500
000
500
00
0
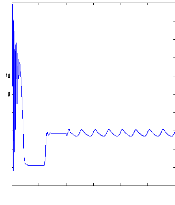
0 0.5 1 1.5 2 2.5 3
t(s)
1
Cem(N.rn)
18
16
14
12
-2
6
4
2
0
Figure (V.12) : vitesse de rotation, couple
électromagnétique,
simulation avec le modèle
réduit, machine en défaut en charge, Cr=3.5 N.m
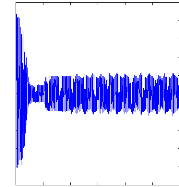
las(A)
-2 0
-25
-10
-15
25
20
15
10
-5
5
0
0 0.5 1 1.5 2 2.5 3
t(s )
Figure (V.13) : courants statorique, avec cassure
d'une barre rb0
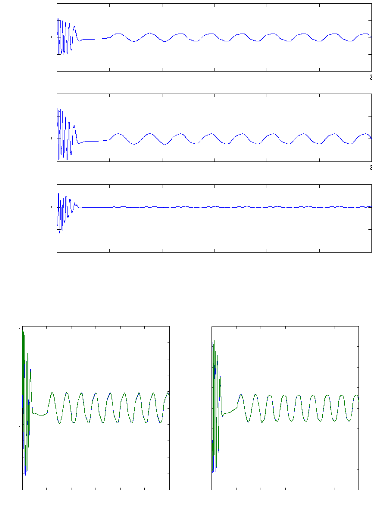
4 0
2 0
0
ids(A)
-2 0
-4 0
0 0 .5 1
t(s ) 1 .5
2 2 .5
0 0 .5
1
1 . 5
t(s )
2 2 .5
t(s)
t(s)
rotor sn
1 barre cassée
0 0 .5 1 1 .5 2 2 .5 3
t(s )
Figure( V.14) :Courant ids et
ids-estimé avec cassure d'une barre rb0 et l'erreur
id sE stim e
-2 0
4 0
2 0
0
1 0
0
-1 0
-2 0
e rre u r(A )
0 0.5 1 1.5 2 2.5 3
0 0.5 1 1.5 2 2.5 3
25
20
15
10
5
0
-5
-10
ids iidsE slim OA )
-15
-20
-25
4000
3000
2000
000
0
000
-2000
1
-1
id r' ill. rE s fin' elA )
-3000
-4000
Figure (V.15) : courants et courants estimés dans les
barres rotoriques : ids et
Ids_estimé, idr et
idr_estimé, avec cassure de barre rb0
2. Cas d'une cassure de deux barres
On impose maintenant un couple de charge de 3.5 N.m à
t=0.5s et la machine opère alors en charge avec cassure de deux
barres.
La figure (V.16) illustre l'évolution temporelle en
régime transitoire et en régime permanent du couple
électromagnétique Cem en présence d'une rupture
de barre rb0 a t=1s et rb1 a t=2s. Aprés une phase
transitoire, celui-ci se stabilise a une valeur proche de 3.5 N. m a cause de
la présence du couple de charge, on remarque dans cette figure des
ondulations dans les allures de la vitesse et du couple, a cause des cassures
des barres.
La figure (V.17) illustre l'évolution temporelle en
régime transitoire et en régime permanent du courant statorique ,
en présence d'une rupture de barre rb0 à t=1s.
La figure (V.18) illustre l'évolution temporelle en
régime transitoire et en régime permanent des courants
ids , idr et leurs courants estimés en
présence d'une rupture de barre rb0 à t=1s et
rb1 à t=2s, ou on remarque la convergence du filtre. Les
courants circulant dans les barres adjacentes aux barres cassées sont
très supérieurs a leur valeur nominale. On conclut donc qu'il y a
un risque de défaillances en chacune dans la mesure ou les contraintes
électriques et thermiques
sont redistribuées sur les conducteurs adjacents.
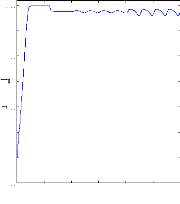
0 0.5 1 1.5 2 2.5 3
t(s)
1
1
R (trim n_
3000
2500
2000
-500
000
500
00
0
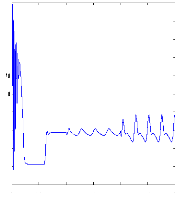
0 0.5 1 1.5 2 2.5 3
t(s)
1
Cem(N.rn)
18
16
14
12
-2
6
4
2
0
Figure (V.16) : vitesse de rotation, couple
électromagnétique, simulation avec le
modèle
réduit, machine en défaut en charge,
Cr=3.5 N.m
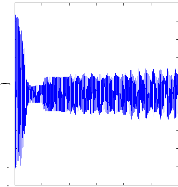
las (A
-10
-15
25
20
15
10
20
25
-5
5
0
0 0.5 1 t(s) 1.5 2 2.5 3
Figure (V.17) : courants statorique , avec cassure de deux
barres
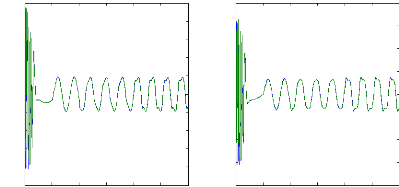
!dr,-i_drE stim(A )
1
-2000
-3000
-4000
4000
3000
2000
000
000
0
25
20
15
10
5
0
-5
-10
ids s E stim e (A)
-15
-20
-25
0 0.5 1 1.5 2 2.5 3
t(s 0 0.5 1
t (s )1.5 2 2.5 3
Figure (V.18) : courants et courants estimés dans : ids
et ids_estimé, idr et idr_estimé, avec cassure de
barre
rb0 et rb1
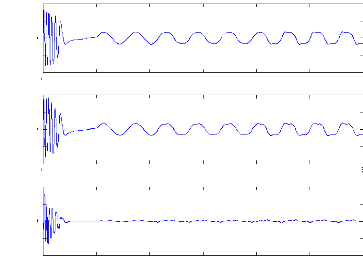
4 0 0 0
2 0 0 0
0
-2 0 0 0
-4 0 0 0
0 0 .5 1
1 . 5
t(s )
2 2 .5 3
4 0 0 0
2 0 0 0
0
-2 0 0 0
-4 0 0 0
0 0 .5 1
t(s )
1 .5 2 2 .5
id re s tim e
id r(A )
erre u r(A )
2 0 0 0
1 0 0 0
0
-1 0 0 0
-2 0 0 0
0 0 .5 1 1 . 5 2 2 .5
t(s )
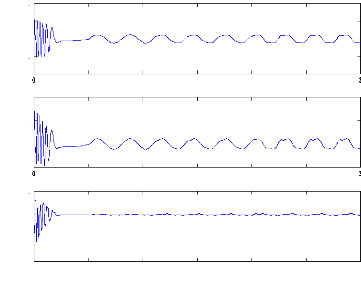
0 .5 1 1 . 5 2
t(s )
2 .5
0 .5 1 1 . 5 2
t(s )
2 .5
0 0 .5 1 1 .5 2 2 .5 3
t(s )
ids(A)
-2 0
-4 0
4 0
2 0
0
id sestim e
-2 0
4 0
2 0
0
e rre u r(A )
-1 0
-2 0
1 0
0
Figure (V.19) : Courant idr et
idr-estimé avec cassure de deux barre
> La cassure d'une barre
Nous simulons la rupture de la première barre (k=0) donc
Rb cassé = 11*Rb sain
Les valeurs de S1, S2, S3 et S4 deviennent :-
S1= 3.29213.10-5 S2= 5.45625.10-6 S3=
5.45625.10-6 S4= 3.29213.10-5
> La cassure de deux barres
On simule la rupture de deux barres adjacentes (K=0, K=1)
Les valeurs de S1, S2, S3 et S4 deviennent :-
S1= 4.11738.10-5 S2= 1.86375.10-5 S3=
1.86375.10-5 S4= 4.11738.10-5
a. Machine saine à vide : La figure
(V.21) présente la variation de la résistance équivalente
rotorique estimée.
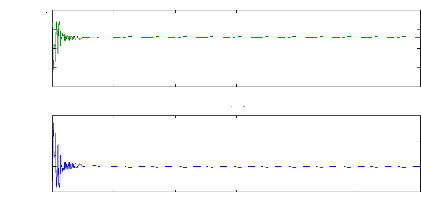
t ( s )
6 x 1 0 - 5
4
2
0
-2
0 0 .5 1 1 .5 2 2 .5 3
StSlestime
(Ohm)
erreur(Ohm)
-2
4 x 1 0 - 5
2
0
0 0 .5 1 1 .5 2 2 .5 3
t ( s )
Figure (V.21) :Estimation de la résistance rotorique
équivalente S1, machine à vide
b. Machine saine en charge :
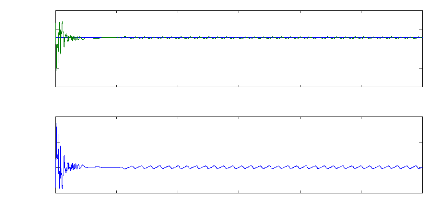
StSlestime
(Ohm)
erreur(Ohm)
0 0 .5 1 1 .5 2 2 .5 3
-2
6 x 1 0 - 5
4
2
0
0 0 .5 1 t ( s 1 .5 2 2 .5 3 )
1 0 - 5
4
2
0
-2
t ( s )
Figure (V.22) : mode la résistance rotorique
équivalente S1, machine saine en charge Cr=3.5N.m
c- Machine avec une cassure de barre :
x 10-5
Rotor sain
0 0.5 1 1.5 2 2.5
|
,S (Q)
1 Estime
S
1
|
6 5 4 3 2
1
|
1 barre cassée
0 0.5 1 1.5 2 2.5
t(s )
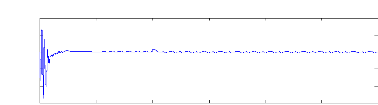
Erreur(Q)
-1
-2
-3
2
0
1
x 10-5
t(s )
Figure (V.23) : Estimation de la résistance rotorique
équivalente S1, machine en défaut (cassure
d'une barre) et en
Charge Cr=3.5N.m
d-Cas d'une cassure de deux barres :
,S (Q)
1 Estime
S
I
Erreur(Q)
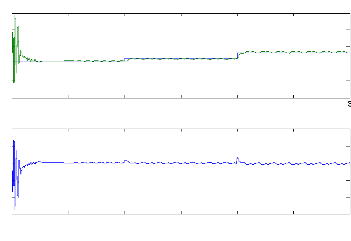
Rotor sain
1 barre cassé
2iéme barre cassée
0 0.5 1 1.5 2 2.5
x 1 0 -5
6
x 1 0 -5
2
t(s )
1
0
-1
-2
-3
0 0.5 1 1.5 2 2.5 3
t(s )
5
4
3
2
1
Figure (V.24) : Estimation de la résistance rotorique
équivalente S1, machine en défaut
(cassure de deux barres) et
en Charge Cr=3.5N.m
Les figures précédentes présentent la
résistance équivalente des barres rotoriques observés.
Après une période de convergence, la résistance
observée converge vers la même résistance. Nous remarquons
une légère oscillation autour de cette valeur.
V.6 Variation des parametres :
En pratique, les paramètres de la machine asynchrone,
autres que S1, ne sont pas connus exactement et leur estimation
résulte d'une identification du système effectuée, par
exemple,
par des méthodes d'estimation hors-ligne.
Ces paramètres sont nécessaires pour le calcul du
modèle discret de la machine utilisé par le filtre de Kalman. En
outre, les paramètres de la machine asynchrone peuvent changer en raison
des phénomènes physiques :
échauffement, saturation magnétique, . . ., . Deux
problèmes se posent alors dans le calcul du filtre de Kalman :
- La variation des paramètres physiques de la machine
asynchrone (comportement non-stationaire),
- L'incertitude paramétrique dans le modèle discret
due a l'erreur lors de l'identification préalable
V.7 Conclusions :
Nous avons décrit une technique pour estimer et suivre
les courants et la résistance rotorique équivalente des barres
rotoriques du modèle réduit du schéma multi-enroulements
de la machine asynchrone. Cette technique a été
vérifiée par simulation. Les résultats obtenus montrent
que le filtre de Kalman étendu peut estimer avec précision en
opération normale de la machine, et en présence des
défauts rotoriques ( barres cassées).
L'avantage d'utiliser les courant statoriques comme variables
d'état est qu'ils sont directement mesurables. La simulation avec le
logiciel MATLAB à donner des résultats , qui reflètent
l'état de la machine. Notre filtre nous permet d'identifier la
présence d'un défaut au niveau du rotor. Nous pouvons ainsi
distinguer le défaut physique qui modifient le fonctionnement du
moteur.
Chapitre VI
Conception d'un régulateur flou pour
la commande vectorielle de la machine
asynchrone
VI.1 Introduction
Afin de pouvoir appliquer la technique de la logique floue
à la commande vectorielle d'une machine asynchrone, nous
présentons dans ce chapitre les concepts de la logique floue et nous
exposons tous les aspects méthodologiques nécessaires à la
compréhension de cette méthode. Nous étudions ensuite la
conception d'un contrôleur flou pour la commande vectorielle de la
machine asynchrone avec ou sans défauts rotoriques.
VI.2 Principes et définitions de la logique
floue
Une des caractéristiques du raisonnement humain est
qu'il est généralement fondé sur des données
imprécises ou même incomplètes. En effet les connaissances
dont nous disposons sur un système quelconque sont
généralement incertaines ou vagues, soit parce que nous avons un
doute sur leur validité ou alors nous éprouvons une
difficulté à les exprimer clairement.
Il est donc nécessaire de penser et de
développer un nouveau type de raisonnement, le raisonnement
approché, qui permettra de traiter mathématiquement
l'imprécis et l'incertain. Le premier à avoir souligné ces
possibilités de développement est Lotfi A. Zadeh qui dés
1965 introduit la théorie de la logique floue.
C'est une technique pour le traitement de connaissances
imprécises et incertaines. Elle permet de prendre en
considération des variables linguistiques dont les valeurs sont des mots
ou des expressions du langage naturel, telle que faible,
élevée, rapide, lent, grand, petit, etc....
A coté d'un formalisme mathématique fort
développé, nous préférons aborder la
présentation de manière intuitive. Nous présentons un
exemple simple pour comprendre l'intérêt de la logique floue sur
la logique classique :
- Exemple : Dans la logique classique, une
vitesse peut être qualifiée par le terme « faible
» ou « élevée ». Dans la logique floue,
des échelons d'appréciation intermédiaires de la variable
vitesse sont possibles. La «vitesse » devient une variable
linguistique dont les valeurs sont par exemple : « très
faible », « faible », « moyenne
», « élevée », « très
élevée ». Une vitesse de 1000 tr/mn par exemple dans la
logique classique correspond au seul ensemble
« moyenne », alors que dans le
modèle flou, elle appartient à la fois aux ensembles «
faible » et « moyenne ».
VI.2.1 Ensembles flous
La notion d'ensemble flou a pour but de permettre des
gradations dans l'appartenance d'un élément à une classe,
c'est-à-dire d'autoriser un élément à appartenir
plus ou moins fortement à cette classe.
Afin de mettre en évidence cette notion, on introduit les
définitions suivantes : Soit un ensemble de référence
X continu ou discret d'objets dénotés { x} .
Un ensemble classique A de X est défini
sur un univers de discours par une fonction caractéristique u A
qui prend la valeur 0 pour les éléments de X
n'appartenant pas à A et la
valeur 1 pour ceux qui appartiennent à A (figure
VI.3). L'univers de discours est l'ensemble des valeurs réelles que peut
prendre la variable floue X .
u A : X ?{ 0,1} (VI.1)
Plus généralement, le domaine de définition
de u A (x) peut être réduit à un sous-
ensemble de X .
Un ensemble flou A peut être
représenté comme un ensemble de paires (élément
générique, degré d'appartenance) ordonnées :
A = { ( x,u A ( x))/x
?X} (VI.2)
A x X A x / x ,
= ? u
? ( )
A = u
? ( )
A x / x , si X est continu
x
si X est discret
(VI.3)
u
u
x
x
(a) (b)
Figure (VI.1)
Fig . I : Exemple de fonctions d'appartenance
(a) logique classique (b) logique
VI.2.2 Variable linguistique
Une variable linguistique est représentée par un
triplet ( V , X , TV ) , dans lequel
V est une
variable (la vitesse, la température ...) définie
sur un ensemble de référence X , ses valeurs
peuvent
être n'importe quel élément de X . On note
TV ( A1 , A2, ...)
un ensemble, fini ou infini, de
sous-ensembles flous de X , qui sont utilisés
pour caractériser V. Afin de permettre un traitement
numérique, il est indispensable de les soumettre à une
définition à l'aide de fonctions d'appartenance .
Par exemple, si la vitesse est interprétée comme
une variable linguistique, alors son ensemble de termes T( vitesse) = { lente,
moyenne, rapide . . .} où chaque terme est caractérisé
par
un ensemble flou.
Ces termes peuvent être définis comme des ensembles
flous dont les fonctions d'appartenance sont montrées sur la figure
(VI.4).

u vitesse
lente moyenne rapide
km/s
40 55 70
1
0.5
Figure (VI.2):Représentation Graphique des termes
linguistiques
VI.2.3 Fonctions d'appartenance
Une définition des variables linguistiques à
l'aide des fonctions d'appartenance est nécessaire dans le but de
traiter des déductions floues par calculateur. Dans ce contexte, est
attribuée à chaque valeur de la variable linguistique une
fonction d'appartenance u , dont la valeur varie entre 0 et 1.
Le plus souvent, nous utilisons des fonctions d 'appartenance de
type triangulaire ou trapézoïdale figure (VI.5).
Fonction triangulaire : L'allure est complètement
définie par trois paramètres { a, b, c} .
? ? x a
- c x
- ?
u x max min
( ) = ? ?k , ) ? ,
0 ? (VI.4)
? b a
- c b
- )
Fonction trapézoïdale : Elle est définie par
quatre paramètres { a, b, c, d } .
( ? x a
- d x
- ? ?
u x max min
( ) = ' ik , ,
1 ) ? , 0 ? (VI.5)
i b a
- d c
- )

fonction triangulaire 1
0
fonction trapézoïdale
a b c d
a b c
1
0
Figure (VI.3) : Formes usuelles des fonctions
d'appartenance.
VI.2.4 Opérations sur les ensembles
flous
Puisque les fonctions caractéristiques des ensembles
flous sont graduelles, l'extension de certaines opérations
définies sur les ensembles classiques au cas des ensembles flous pose
certaines difficultés. Donc, il n'est pas possible d'appliquer
directement la logique classique qui manipule des ensembles à fonctions
caractéristiques binaires (0 ou 1). Pour pallier à ce
problème, sont introduites les définitions d'outils
nécessaires au traitement des ensembles flous .
Soient A et B deux ensembles flous dans X
ayant respectivement uA et uB
comme
fonctions d'appartenance. L'union, l'intersection, et le
complément des ensembles flous sont définies à l'aide de
leurs fonctions d'appartenance .
Ces relations sont traduites par les opérateurs
"Et" , "Ou " et "Non".
Les opérateurs les plus utilisés en logique floue
sont donc :
- l'opérateur " Et " correspond à
l'intersection de deux ensembles A er B. Il peut être
réalisé par:
- La fonction " min " : x X ( x ) ( ( x
) ( x ) )
? ? u D = min u A , u B
uA n B( x ) =
uA(x) .uB(x) .
- La fonction arithmétique " produit " : -
L'opérateur " Ou " correspond à l'union de deux
ensembles A et B. Il peut être réalisé par:
- La fonction " max " : x X ( x ) ( ( x
) ( x ) )
? ? u C = max u A , u B
- La fonction arithmétique " somme ": u A ? B
( x ) = uA(x) +
uB(x) - L'opérateur " Non " est
réalisé par : u A ( x ) = 1 -
uA( x)
VI.2.5 Propositions floues
VI.2.5.1 Propositions floues
élémentaires
Une proposition floue élémentaire est
définie à partir d'une variable linguistique ( V , X
, TV ) par la qualification <<V est A>>,
pour une caractérisation floue A, appartenant à TV.
VI.2.5.2 Propositions floues générales
Une proposition floue générale est obtenue par la
composition de propositions floues élémentaires << V est A
>>, << W est B >> ... pour des variables linguistiques V, W
... .
Plus généralement, on peut construire des
propositions floues par conjonction, disjonction ou implication, par exemple de
la forme << si V est A et W est B alors U est C >> (si la taille
est moyenne et le prix est peu cher, alors l'achat est conseillé).
VI.3 Raisonnement en logique floue
Avec l'unique schéma de raisonnement
(Si les conditions sont remplies, Alors la
conclusion est validée) et les trois opérateurs
Et , Ou et Non , nous
pouvons déjà prendre un grand nombre de décisions logiques
Nous produisons aussi une nouvelle information (une décision) à
partir d'informations anciennes.
Le raisonnement flou fait appel à trois notions et
étapes fondamentales :
- l'implication floue,
- l'inférence floue,
- l'agrégation des règles..
VI.3.1 Implication floue
L'implication floue donne une information sur le degré
de vérité d'une règle floue. En d'autre termes, on
quantifie la force de véracité entre la prémisse et la
conclusion. Considérons par exemple les deux propositions floues.
? x est A ?
? y est B ? Où x et y sont des variables floues et A et B
des ensembles flous de l'univers du discours U.
Ainsi que la règle floue : Si ? x est A ?
Alors ? y est B ? .
L'implication floue donne alors le degré de
vérité de la règle floue précédente à
partir des degrés d'appartenance de x à A (prémisse) et de
y à B (conclusion).
On notera implication : opérateur imp (équivalent
à l'opérateur Alors). Les normes d'implication les plus
utilisées sont :
imp(uA(x), uB(y)) = min(uA(x), uB(y)) (VI.5)
- La norme Larsen imp(uA(x), uB(y)) = (uA(x).uB(y))
(VI.6)
VI.3.2 Inférence floue
Le problème tel qu'il se pose en pratique n'est
généralement pas de mesurer le degré de
véracité d'une implication mais bien de déduire, à
l'aide de faits et de diverses règles implicatives, des
évènements potentiels. En logique classique, un tel raisonnement
porte le nom de Modus Ponens (raisonnement par l'affirmation).
Si p q vrai
- La norme Mamdani
Alors q vrai
et p vrai
De façon générale, les conditions
d'utilisation du Modus Ponens Généralisé sont les
suivantes :
Prémisse conclusion
Règle floue : Si x est A Alors y est B
Fait observé : Si x est A'
Conséquence : y est B'
A' et B' sont les ensembles flous constatés dans le cas
que l'on traite et ne sont pas nécessairement strictement égaux
à A et B. B' est l'ensemble flou résultant de A' par
l'application de l'implication.
Les informations disponibles pour déterminer la
conséquence sont donc d'une part celles relatives à la
règles, quantifiées par l'implication floue uB/A(x,
y), d'autres part celles relatives au fait observé, quantifiées
par la fonction d'appartenance uA'.
-Par matrice d'inférence
Elle rassemble toutes les règles d'inférences
sous forme de tableau. Dans le cas d'un tableau à deux dimension, les
entrées du tableau représentent les ensembles flous des variables
d'entrées (température : T et vitesse : V). L'intersection d'une
colonne et d'une ligne donne l'ensemble flou de la variable de sortie
définie par la règle. Il y a autant de cases que de
règles.
|
U
|
T
|
|
F
|
M
|
E
|
|
V
|
F
|
Z
|
P
|
GP
|
|
E
|
Z
|
Z
|
P
|
Les règles que décrit ce tableau sont (sous forme
symbolique) :
Si T est F Et V est F
Alors U = Z Ou
Si T est M Et V est F
Alors U = P Ou
Si T est E Et V est F
Alors U = GP Ou
Si T est F Et V est E
Alors U = Z Ou
Si T est M Et V est E
Alors U = Z Ou
Si T est E Et V est E
Alors U = P
Dans l'exemple ci-dessus, on a représenté les
règles qui sont activées à un instant donné par des
cases sombres :
Si (T est M Et V est F)
Alors U = P Ou
Si (T est E Et V est F)
Alors U = GP
Il s'agit maintenant de définir les degrés
d'appartenance de la variable de sortie à ses sous-ensembles flous. Nous
allons présenter les méthodes d'inférence qui permettent
d'y arriver. Ces méthodes se différencient essentiellement par la
manière dont vont être réalisée les
opérateurs (ici "Et " et "Ou") utilisés dans
les règles d'inférence.
Les trois méthodes d'inférence les plus usuelles
sont : Max-min, Max-produit et Somme-produit VI.3.3 Agrégation
des règles
Lorsque la base de connaissance comporte plusieurs
règles, l'ensemble flou inféré B' est obtenu après
une opération appelée agrégation des règles. En
d'autres termes l'agrégation des règles utilise la contribution
de toutes les règles activées pour en déduire une action
de commande floue. Généralement, les règles sont
activées en parallèle et son liées par l'opérateur
" Ou ".
Nous pouvons considérer que chaque règle donne un
avis sur la valeur à attribuer au signal de commande, le poids de chaque
avis dépend du degré de vérité de la conclusion.
VI.4 Conception d'un contrôleur flou
Après avoir énoncé les concepts de base et
les termes linguistiques utilisés en logique floue, nous
présentons la structure d'un contrôleur flou.
En général, un contrôleur flou est un
système qui associe à tout vecteur d'entrée
X=[x1,x2,...,xn] un vecteur de sortie Y=[y1,y2,....yn] tel que Y=F(X) où
F(X) est souvent une fonction non linéaire.
Le schéma de base d'un contrôleur flou repose sur
la structure d'un régulateur classique à la différence que
l'on va retenir la forme incrémentale. Cette dernière donne en
sortie, non pas la grandeur de commande à appliquer au processus mais
plutôt l'incrément de cette grandeur.
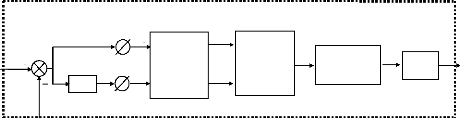
Contrôleur Flou
Iref
+
1 -
-z
1
e
de Kde
Ke
Fuzzification
de~
e~
Base de Règles et logique prise de décision
dRs
Défuzzification
dRs~
?
RS
Courant mesuré
Figure (VI.4) : Structure interne d'un contrôleur flou
Dans le schéma ci-dessus comme dans ce qui suit, nous
notons
· e : l'erreur, elle est définie par la
différence entre la consigne et la grandeur à réguler.
e ( k ) = e* (k ) -
e(k ) (VI.7)
· de: la dérivée de l'erreur, elle est
approchée par
de k ( ) ( 1)
e k e k
- -
( ) = (VI.8)
Te
La sortie du régulateur est donnée par
R S ( k ) = R S
(k -1) +dR S (k) (VI.9)
Des facteurs d'échelle des gains sont utilisés en
entrée et en sortie du contrôleur flou, ils permettent de changer
la sensibilité du régulateur flou sans en changer sa
structure.
Les règles d'inférences permettent de
déterminer le comportement du contrôleur flou. Iidoit
donc inclure des étapes intermédiaires qui lui permettent de
passer des grandeurs réelles
vers les grandeurs floues et vice versa; ce sont les
étapes de fuzzification et de defuzzification (figure VI.5)
1- L'interface de fuzzification inclut les fonctions
suivantes :
Les ensembles flous des variables d'entrée et leurs
fonctions d'appartenance sont à définir en premier lieu.
L'étape de fuzzifiation permet de fournir les
degrés d'appartenance de la variable floue à ses ensembles flous
en fonction de la valeur réelle de la variable d'entrée.
2- La base de connaissance comprend une connaissance du domaine
d'application et les buts du contrôle prévu. Elle est
composée.
- d'une base de données fournissant les
définitions utilisées pour définir les règles de
contrôle linguistique et la manipulation des données
floues dans le contrôleur ;
- d'une base de règles caractérisant les buts et
la politique de contrôle des experts du
domaine au moyen d'un ensemble de règles de contrôle
linguistique.
Comme nous l'avons précédemment
évoqué, nous allons nous baser sur une matrice ou table
d'inférence pour cette étape.
La construction d'une telle table d'inférence repose sur
une analyse qualitative du processus.
L'inférence se fait donc sur la base des matrices que
l'on vient de décrire. On commence par utiliser un opérateur pour
définir la description symbolique associée à la
prémisse de la règle ; c'est à dire réaliser le "
Et ". On passe ensuite à l'inférence proprement dire qui
consiste à caractériser la variable floue de sortie pour chaque
règle. C'est l'étape de la conclusion " Alors ".
Enfin, la dernière étape de l'inférence,
appelée agrégation des règles, permet de
synthétiser ces résultats intermédiaires.
Comme nous l'avons vu, la manière de réaliser les
opérateurs va donner lieu à des contrôleurs flous
différents. Les régulateurs les plus courants sont ceux de :
· Régulateur type Mamdani
· Régulateur type Sugeno
Ils sont dits de type procédural . En effet, seule la
prémisse est symbolique. La conclusion, qui correspond à la
commande, est directement une constante réelle ou une expression
polynomiale fonction des entrées.
L'établissement des règle d'inférence est
généralement basé sur un des points suivants :
· l'expérience de l'opérateur et/ou du
savoir-faire de l'ingénieur en régulation et contrôle.
· Un modèle flou du processus pour lequel on
souhaite synthétiser le régulateur.
· Les actions de l'opérateur ; s'il n'arrive pas
à exprimer linguistiquement les régles qu'il utiliser
implicitement.
· L'apprentissage ; c'est dire que la synthèse de
règle se fait par un procédé automatique également
appelé superviseur. Souvent, des réseaux neuronaux y sont
associées.
L'évaluation des règles d'inférence
étant une opération déterministe, il est tout à
fait envisageable de mettre sous forme de tableau ce contrôleur.
Il reste, toutefois, intéressant dans certains
systèmes complexes, de garder l'approche linguistique plutôt que
d'avoir à faire à un nombre trop important de valeurs
précises .
De plus, un algorithme linguistique peut être
examiné et discuté directement par quelqu'un qui n'est pas
l'opérateur mais qui possède de l'expérience sur le
comportement du système.
La formulation linguistique de la sortie permet également
d'utiliser le régulateur flou en boucle ouverte donnant ainsi à
l'opérateur les consignes à adopter.
Si, après inférence, on se retrouve avec un
ensemble flou de sortie caractérisé par l'apparition de plus d'un
maximum, cela révèle l'existence d'au moins deux règles
contradictoires. Une grande zone plate (figure VI.7,8), moins grave de
conséquence, indiquerait que les règles, dans leur ensemble, sont
faibles et mal formulées.
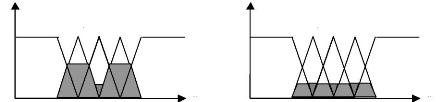
u
u
N
Z P PG
NG
1
N
1
Z P PG
dRn
dRn
NG
Figure (VI.5) : Cas de régles floues Figure (VI.6) : Cas
de régles floues
contradictoires mal formulées
3- La logique de prise de décision est le noyau du
contrôleur flou, elle est capable de simuler la prise de décision
de l'être humain en se basant sur les concepts flous et les règles
d'inférences en logique floue.
4- L'inférence de défuzzification réalise
les fonctions suivantes :
- une cartographie d'échelle convertissant la plage des
variables de sortie aux univers de discours appropriés ;
- Une défuzzification fournissant une action de
contrôle (physique) à partir d'une action de contrôle
flou.
Pour pouvoir définir la loi de commande, le
contrôleur flou doit être accompagné d'une procédure
de défuzzification jouant le rôle de convertisseur de la commande
floue en valeur physique nécessaire pour un tel état du
processus. Il s'agit de calculer, à partir des degrés
d'appartenance à tous les ensembles flous de la variable de sortie,
l'abscisse qui correspond à la valeur de cette sortie.
Plusieurs stratégies de défuzzification existent,
les plus utilisées sont .
- Méthode du maximum
- Méthode de la moyenne des maxima
- Méthode du centre de gravité
- Méthode des hauteurs pondérées
VI.5 Conception d'un régulateur flou de vitesse
Nous allons maintenant illustrer les principes du
contrôleur flou sur l'exemple de la régulation de vitesse de la
machine asynchrone. La phase de conception d'un contrôleur flou passe
toujours par quatre stades que nous allons détailler successivement.
· 1 ére étape : Choix des
entrées et sorties
Il s'agit de déterminer les caractéristique
fonctionnelles (1) et opérationnelles (2) du contrôleur.
(1)- Il faut d'abord choisir les variables d'entrée et
de sortie. Leur choix dépend du contrôle que l'on veut
réaliser. Que souhaite-t-on au juste commander ? A l'aide de quels
paramètres va-t-on obtenir la commande ?
(2)-Il faudra ensuite se pencher sur le domaine des valeurs
que pourront prendre ces variables). On partitionnera alors ces domaines en
intervalles, auxquels on associera un label descriptif (variables
linguistique). Cette étape revient à définir les univers
des discours des variables d'entrée et de sortie et les diviser en
sous-ensembles flous. Cette répartition est intuitif et basé sur
l'expérience. On est d'ailleurs généralement amené
à l'affiner en cours de conception. Une règle de bonne pratique
est de fixer 5 à 9 intervalles par univers de discours. Il faut
également prévoir un plus grand nombre de zones à
proximité du point de fonctionnement optimal pour en faciliter
l'approche régulière [43], [44].
Illustration sur le régulateur de
vitesse
Dans le cas de la régulation de vitesse, on a besoin
habituellement de l'erreur (e=?r ref -?r) et de la
dérivée d'erreur (de) et parfois de l'intégration d'erreur
:
|
e k
( ) rref ( ) r ( )
= ? k - ? k
de k e k e k
( ) ( ) ( )
= - - 1
|
(VI.12)
|
La sortie du régulateur de vitesse est la valeur du
couple de référence dans le schéma de la commande
vectorielle indirecte de la machine asynchrone. Si cette sortie est directement
appliquée au processus, le contrôleur est alors appelé
contrôleur flou de type PD [42] et.on peut écrire : Te=
Fuzzy (e, de)
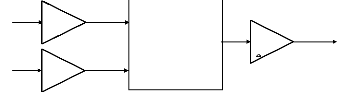
Contrôleur
flou
Kde
Ke
e
de
Kdt
dte
e
de

Kde
ke
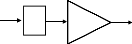
kTe
?
Te
Figure (VI.7 ) : Contrôleur flou de type PD
Par contre, si la sortie du contrôleur flou est
considérée comme un incrément de commande, le
contrôleur est appelé contrôleur flou de type PI [42] et on
peut écrire :
? . ?
dte= Fuzzy (e, de) ou encore dte = F uzzy ? e dt de
?? , ?? ;
soit Te ( k ) = dte(k)
+Te(k -1) (VI.13)
Figure (VI.8) Contrôleur flou de type PI
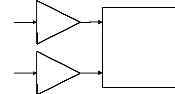
Contrôleur
flou
e
de
Kde
ke
Kdte
Le contrôleur de type PID peut être obtenu en
combinant des contrôleurs flous de type PI et PD de façon suivante
:
+ Te
?
kTe
+
Figure (VI.9) Contrôleur flou de type PID
On remarque que cette structure de commande flou de type PID
est en fait une association en série d'un contrôleur flou de base
et d'une structure de régulation de type PI, qui, elle, n'est pas floue
[42].
De plus, comme dans la régulation classique, on a
besoin d'une limitation du couple de référence, pour
empêcher une sur utilisation de la machine [36]. Cette fonction peut
être réalisée par l'algorithme de la figure (VI.10).
Comme les fonctions d'appartenance sont normalisées
entre [-1, 1], les variables sont multipliées avec des gains
proportionnels. Finalement, la structure du régulateur de vitesse
à logique floue est la suivante :
Calcul de Te(k)
Te(k) = dte(k) + Te(k-1)
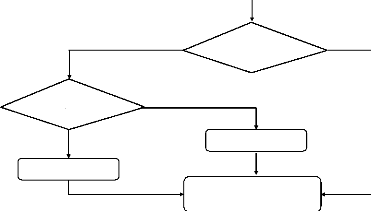
oui
Te(k) = Temax
Te(k) > 0
oui
non
|Te(k)| = Temax
Te(k)
variable de sortie
Te(k) = - Temax
non
Figure (VI.10) Algorithme pour limitation deTe(k)
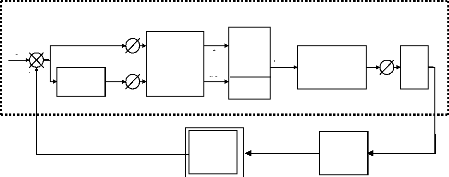
?ref
CONTROLEUR FLOU
+
-
?
Calcul de
de
e
de
kde
k
Fuzzificati
on
Processus
d
de~
Règles
de
contrôle
flou
Inférenc
dte
Défuzzificatio
n
Limitatio
n du
couple
dte
kdte
?
Te
Figure (VI.11) Structure du régulateur de vitesse à
logique floue
D'après ce schéma, le système est
composé :
* du contrôleur flou composé :
· d'un bloc de calcul de variation de l'erreur au cours du
temps (de) ;
· des facteurs d'échelles associés à
l'erreur, à sa dérivée et à la commande (dte);
· d'un bloc de fuzzification de l'erreur et de sa variation
;
· des règles de contrôle flou et d'un moteur
d'inférence ;
· d'un bloc de défuzzification utilisé pour
la variation de la commande floue en valeur numérique ;
· d'un bloc intégrateur ;
* du processus à contrôler.
· 2 éme étape :
Définition des fonctions d'appartenance
La première étape de conception a permis de
cerner au mieux les caractéristiques linguistiques des variables. Il
faut maintenant définir complètement les sous-ensembles flous,
c'est à dire expliciter leurs fonctions d'appartenance. Une fois encore,
l'intuition et l'expérience auront leur rôle à jouer.
Quelques principes ressortent de la pratique: choix de fonctions triangulaires
ou trapézoïdales, recouvrement d'une fonction de 10 à 50% de
l'espace des sous-ensembles voisins, somme des degrés d'une zone de
recouvrement égale à 1 (degré maximal d'appartenance)
[43], [44].
Illustration sur l'exemple
Les fonctions d'appartenance des variables d'entrée sont
illustrées par la figure (VI.14)
avec :
NB : Negative Big (Négative Grand) PB : Postive Big
(Positive Grand)
NM : Negative Medium (Négative Moyenne) PM : Postive
Medium (Positive Moyenne) NS : Negative Small (Négative Petit) PS :
Postive Small (Positive Petit)
ZE : Zero
On constate que les fonctions d'appartenance de l'erreur ont
une forme asymétrique créant une concentration autour de
zéro qui améliore la précision près du point de
fonctionnement désiré.
Pour la même raison, les formes des fonctions
d'appartenance de la variable de sortie sont également
asymétriques. Cependant, nous introduisons deux sous-ensembles
additionnels compte-tenu de la sensibilité de cette variable [44].
NVB : Negative Very Big (Négative Très Grand) PVB
: Postive Very Big (Positive Très Grand)
· 3 éme étape :
Définition du comportement du contrôleur flou Cette
étape concerne l'élaboration de la base de règle du
contrôleur. Analyse du comportement dynamique -
Détermination du jeu de règles
L'analyse temporelle, qui doit conduire à
établir les règles du contrôleur flou, peut par exemple
consister à considérer la réponse à un
échelon d'un processus à piloter en fonction des objectifs que
l'on se sera fixé en boucle fermée, et à écrire les
règles pour chaque type de comportement du processus :
0.8
0.6
0.4
0.2
0
1
Degré d'appartenane u(e)
NB NM NS EZ PS PM PB
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
erreur e
D e g r é d 'a p p a r t e n a n c e u ( d e )
- 1 - 0 . 5 0 0 . 5 1
0 . 8
0 . 6
0 . 4
0 . 2
0
1
N B N M N S E Z P S P M P B
Variation d e l 'e r r e u r `d e '
Figure (VI.12) Fonctions d'appartenance des variables
d'entrée
D e g r é d 'a p p a rte n a n c e u ( d te )
- 1 - 0 .5 0 0 .5 1
0 .8
0 .6
0 .4
0 .2
0
1
N V B N B N M N S E Z P S P M P B P V B
Variation d u Couple: `d te '
Figure (VI.13) Fonctions d'appartenance de la variables de
sortie
7
Sortie s

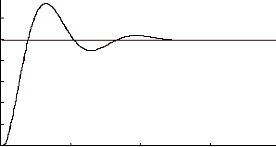
1
temps
·
4
3
·
·
2
·
6
5
·
·
·
·
8 9
Référence
·

Figure (VI.14) Ecriture du jeu de règles grâce
à une analyse temporelle
a)- Pour expliquer la procédure à suivre [42],
on considère les neuf points indiqués sur la réponse
à un échelon et, pour chacun de ces points, on explicite
l'expertise sous la forme suivante :
· 1 Si e = PB Et de = ZE Alors du = PB (départ,
commande importante)
· 2 Si e = PB Et de = NS Alors du = PM (augmentation de la
commande pour gagner l'équilibre)
· 3 Si e = PM Et de = NS Alors du = PS (très faible
augmentation de u pour ne pas dépasser)
· 4 Si e = PS Et de = NS Alors du = ZE (convergence vers
l'équilibre correcte)
· 5 Si e = ZE Et de = NS Alors du = NS (freinage du
processus)
· 6 Si e = NS Et de = NS Alors du = NM (freinage et
inversion de la variation de la commande)
· 7 Si e = NM Et de = ZE Alors du = NM (rappel du processus
vers l'équilibre correcte)
· 8 Si e = NS Et de = PS Alors du = ZE (convergence vers
l'équilibre correcte)
· 9 Si e = ZE Et de = ZE Alors du = ZE
(équilibre)
En décrivant point par point le comportement du
processus et l'action de variation de commande à appliquer, on en
déduit la table suivante (table du contrôleur flou de base) qui
correspond en fait à table de règles très connue de Mac
Vicar - Whelan [42] :
b)- Pour déduire les autres règles ,nous
procédons à nouveau à une autre expertise [45].
La forme générale de la réponse de
vitesse est représentée sur la figure (VI.16). Selon l'amplitude
de e et le signe de de, la réponse de vitesse est divisée en
quatre régions. Les indices utilisés pour identifier chaque
région sont définies comme suit :
a1 : e > 0 et de < 0, a2 : e < 0 et de < 0,
a3 : e < 0 et de > 0, a4 : e > 0 et de > 0,
|
e
de
|
NB
|
NM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
|
PB
|
ZE
|
PS
|
PM
|
PB
|
PB
|
PB
|
PB
|
|
PM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
PB
|
PB
|
|
PS
|
NM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
PB
|
|
ZE
|
NB
|
NM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
|
NS
|
NB
|
NB
|
NM
|
NS
|
ZE
|
PS
|
PM
|
|
NM
|
NB
|
NB
|
NB
|
NM
|
NS
|
ZE
|
PS
|
|
NB
|
NB
|
NB
|
NB
|
NB
|
NM
|
NS
|
ZE
|
Figure (VI.15) Table de règles de MacVicar-Whelan
Pour identifier la pente de la réponse lors du passage par
le point de référence on utilise l'indice ci défini comme
suit :
|
c1
|
: ( e > 0
|
--* e < 0
|
) et de <<< 0
|
|
c2
|
: ( e > 0
|
--* e < 0
|
) et de << 0
|
|
c3
|
: ( e > 0
|
--* e < 0
|
) et de
|
< 0
|
|
c4
|
: ( e < 0
|
--* e > 0
|
) et de
|
> 0
|
|
c5
|
: ( e < 0
|
--* e > 0
|
) et de
|
>> 0
|
|
c6
|
: ( e < 0
|
--* e > 0
|
) et de
|
>>> 0
|
Quant à l'indice représentatif du
dépassement de la consigne, il est défini par :
|
m1 : de
|
0
|
et
|
e <<<
|
0
|
m4 : de
|
0
|
et
|
e > 0
|
|
m2 : de
|
0
|
et
|
e <<
|
0
|
m5 : de
|
0
|
et
|
e >> 0
|
|
m3 : de
|
0
|
et
|
e <
|
0
|
m6 : de
|
0
|
et
|
e >>> 0
|
Les trois types d'indices mentionnés ci-dessous peuvent
être combinés et former un plan d'état. Le tableau de la
figure (VI.17) est légèrement modifié pour tenir compte
que la variable de sortie est formée de neuf valeurs floues.
|
e
|
|
NB
|
NM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
|
de
|
NB
|
NVB
|
NVB
|
NVB
|
NB
|
NM
|
NS
|
ZE
|
|
NM
|
NVB
|
NVB
|
NB
|
NM
|
NS
|
ZE
|
PS
|
|
NS
|
NVB
|
NB
|
NM
|
NS
|
ZE
|
PS
|
PM
|
|
ZE
|
NB
|
NM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
|
PS
|
NM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
PVB
|
|
PM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
PVB
|
PVB
|
|
PB
|
ZE
|
PS
|
PM
|
PB
|
PVB
|
PVB
|
PVB
|
Figure (VI.16) Base de règles du régulateur I de
vitesse
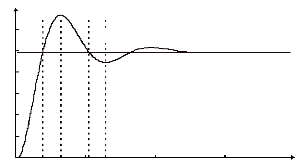
Réponse
1.4
a1 a2 a3 a4
Référence
temps
0.5 1 1.5 2
1.2
1.0
0.8
0.6
0.4
0.2
0
a)
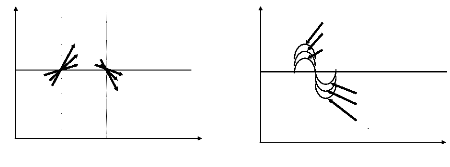
? réponse ?
C1
C2
référence
C4
C5
C6
temps
b)
C3
m6
temps
réponse
m2
référence
c)
Figure (VI.17) Comportement dynamique de la réponse de
vitesse
|
e
de
|
NB
|
NM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
|
NB
|
|
c1
c2
c3
|
|
|
a1
|
|
|
a2
NS
|
|
NM
|
|
|
|
ZE
|
m1 m2 m3
|
ZE
|
m4 m5 m6
|
|
PS
|
|
c4
c5
c6
|
|
|
a3
PB
|
|
|
a4
|
|
|
PM
|
|
|
|
Figure (VI.18) Règles linguistiques de contrôle
Dans le tableau (VI.16), chaque élément formalise
une règle comme, par exemple : Si [ e(k) est NM ] Et [ de(k) est ZE ],
ALORS [ dte(k) est NM ].
Cet ensemble de règles regroupe toutes les situations
possibles du système évaluées par les différentes
valeurs attribuées à e et à sa variation de et toutes les
valeurs correspondantes de la variation de la commande dte.
L'évaluation des gains proportionnels provient de
l'expérience. Pour le gain Ke , par exemple, on peut commencer avec un
facteur qui dépend de l'erreur maximale. Effectivement ces valeurs font
partie de la procédure d'évaluation par simulation. On a
trouvé les valeurs suivantes pour la machine asynchrone simulée
:
Ke = 0.1 Kde = 0.6*10-5 Kdte = 65
Dans une deuxième approche d'un régulateur à
logique floue, on utilise différentes fonctions d'appartenance pour la
variable de sortie (figure VI.21):
Degré d'appartenance u(dte)
1 NVB NB NM NS ZE PPS PM PB PVB
0.5
0
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
Variation du couple `dte'
Figure (VI.19) Fonctions d'appartenance de la variable de sortie
dte(k) (II)
Grâce à cette fonction d'appartenance,
appelée «singleton », on tire profit du calcul de la variable
de sortie. Dans ces conditions, la formule du centre de gravité se
simplifie par :
m

=
i
=
i
=
1
m
? u ( )
dte i
1
(VI.14)
dteres
m étant le nombre totale de règles.
Par rapport à la première approche, les
règles sont aussi modifiée
|
e
|
|
NB
|
NM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
|
de
|
NB
|
NVB
|
NVB
|
NVB
|
NB
|
NM
|
ZE
|
ZE
|
|
NM
|
NVB
|
NVB
|
NB
|
NB
|
NM
|
ZE
|
PS
|
|
NS
|
NVB
|
NB
|
NB
|
NM
|
PS
|
PB
|
PM
|
|
ZE
|
NVB
|
NB
|
NM
|
ZE
|
PM
|
PB
|
PB
|
|
PS
|
NVB
|
NB
|
NS
|
PM
|
PB
|
PB
|
PVB
|
|
PM
|
NVB
|
ZE
|
PM
|
PB
|
PB
|
PVB
|
PVB
|
|
PB
|
NVB
|
ZE
|
PM
|
PB
|
PVB
|
PVB
|
PVB
|
Figure (VI.20) Base des règles du régulateur II
Ici, la méthode pour déterminer les
règles est appelée en anglais << bang-bang control
>> [44]. Ce type de méthode est utilisée pour amener
initialement le système près du point de fonctionnement
souhaité, puis changer la polarité de la variable de commande
afin d'éviter un dépassement. Ces deux étapes sont
visualisées par les régions A et B dans le tableau (VI-23) :
|
e
|
|
de
|
|
NB
|
NM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
|
NB
|
|
|
|
|
|
|
|
|
NM
|
|
|
|
|
B
|
|
|
|
NS
|
|
|
|
|
|
|
|
|
ZE
|
|
|
|
D
|
|
|
A
|
|
PS
|
|
|
C
|
|
|
|
|
|
|
PM
|
|
|
|
|
|
|
|
|
|
PB
|
|
|
|
|
|
|
|
|
Figure (IV.21) Schéma de règles en principes de
<< bang-bangc control >>
Ce principe est répété dans la
région C, mais plus modestement. Les flèches décrivent le
chemin, qui est suivi dans le tableau (VI.21) en cas d'un échelon
positif comme signal de référence. Par conséquent, le
reste du tableau est rempli par symétrie à la région D.
VI.6 Application de la logique floue au modèle
réduit du schéma multi_enroulements de la machine
asynchrone
VI.6.1 Résultats de la simulation
le régulateur flou a été simulé
sous différentes conditions avec ou sans défauts rotorique ; les
résultats de simulation permettant ainsi de comparer les deux types de
régulations (classique et floue). Ces simulations s'avèrent
nécessaires dans le processus d'évaluation des régulateurs
à logique floue.
1. Machine saine
a. Machine saine à vide
Dans une première étape, nous avons simulé
le fonctionnement du régulateur flou avec une machine saine à
vide. Ce dernier présente un grand intérêt pour une
implémentation en temps réel au niveau algorithmique (meilleure
utilisation de la mémoire et temps de traitement plus rapide ).
La figure (VI.22) montre la réponse de la vitesse et du
couple avec un régulateur de vitesse flou dans le cas d'une machine
à vide. Les temps de réponse en démarrage sont
respectivement de 0.2s pour une consigne de 1000 tr/mn . Les temps d'inversion
de la vitesse à -1000 tr/mn et 1000 tr/mn sont de l'ordre de 0.4s. Les
temps de réponse et d'inversion sont pratiquement identiques à
ceux du régulateur classique.
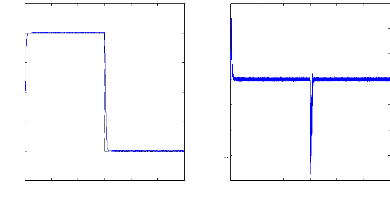
1500
1000
500
0
n (trim n)
-500
-1000
-1500
60
40
20
0
-20
C en (N .m )
-40
-60
-80
0 0.5 1 1.5 2 2.5 3
t(s)
0 0.5 1 1.5 2 2.5 3
t(s)
Figure (VI.22) : vitesse de rotation, couple
électromagnétique , simulation avec modèle,
machine
saine à vide.
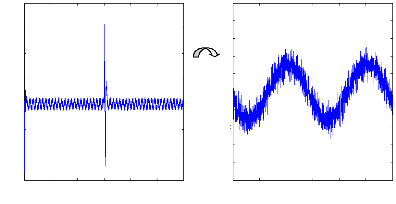
0 0.5 1 1.5 2 2.5 3
t(s)
1 1.02 1.04 1.06 1.08 1.1 1.12
t(s)
jas(A )
-10
-20
-30
40
30
20
10
0
-1
-2
-3
-4
-5
5
4
3
2
1
0
zoom
jas(A )
Figure (VI.23) : courant statorique, simulation avec
modèle réduit, machine
Saine à vide .
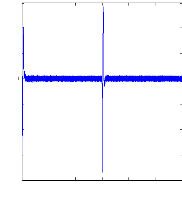
0 0.5 1 1.5 2 2.5 3
t(s)
irbo(A )
-1000
-1500
-2000
1500
1000
-500
500
0
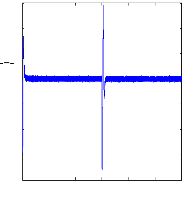
0 0.5 1 1.5 2 2.5 3
t(s)
irbilA
-1000
-1500
-2000
1500
1000
-500
500
0
Figure (VI.24) : courants dans les barres rotoriques : Irb0,
Irb1,
simulation avec modèle global, machine saine à
vide
b. Machine saine en charge
Les résultats de simulation de la figure (VI.25) montrent
que l'allure de la courbe de vitesse est similaire à celle obtenue par
un (PI classique) mais avec un temps de montée un peu plus rapide
(environ 0.17 s) ceci est dû au fait que les domaines physiques relatifs
à l'erreur et la variation de l'erreur soient plus larges dans le cas du
contrôleur flou. Le comportement des autres grandeurs est similaire
à celui obtenu avec un régulateur conventionnel. Les
réponses des systèmes sont caractérisées par les
même faits : le démarrage et l'inversion de vitesse s'effectuent
à couple maximal .
La figure (VI.25) montre également l'effet d'une
perturbation du couple de charge en régime permanent Cr=3.5N.m. Le
contrôleur flou reste pratiquement insensible à cette variation du
couple résistant. La réaction du régulateur à
logique floue au moment d'application de charge est aussi
caractérisée par une variation plus petite et un temps plus court
par rapport au régulateur classique.
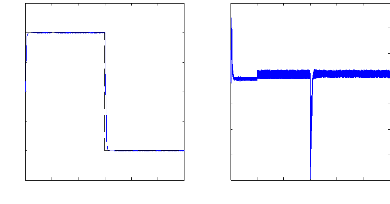
1500
1000
500
0
n (trim n )
-500
-1000
-1500
60
40
20
0
-20
C en (N .m )
-40
-60
-80
0 0.5 1 1.5 2 2.5 3
t(s)
0 0.5 1 1.5 2 2.5 3
t(s)
Figure (VI.25) : vitesse de rotation, couple
électromagnétique , simulation avec modèle,
machine
saine en charge Cr= 3.5 N.m
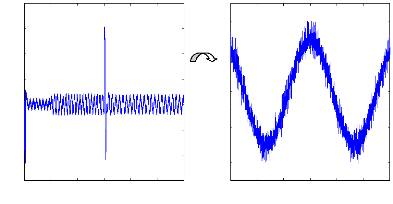
0 0.5 1 1.5 2 2.5 3
t(s)
1 1.02 1.04 1.06 1.08 1.1 1.12
t(s)
las (A )
-10
-20
-30
40
30
20
10
0
-1
-2
-3
-4
-5
5
4
3
2
0
1
zoom
las (A )
Figure (VI.26) :courant statorique, simulation avec
modèle réduit, machine
saine en charge, Cr=3.5N.m.
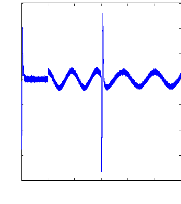
0 0.5 1 1.5 2 2.5 3
t(s )
irbo(A)
-1000
-1500
-2000
1500
1000
-500
500
0
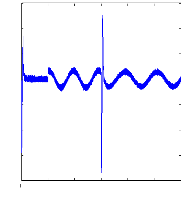
0 0.5 1 1.5 2 2.5 3
t(s)
irb 1 (A )
-1000
-1500
-2 00 0
1500
1000
-500
500
0
Figure (VI.27) : courants dans les barres rotoriques : Irb0,
Irb1, simulation avec modèle global,
machine saine en charge,
Cr= 3.5 N.m
2. Machine en défaut
a. Machine avec cassure de barre
La figure (VI.28) illustre l'évolution temporelle en
régime transitoire et en régime permanent de la vitesse de
rotation, on a une inversion de vitesse à t=0.4s. La figure illustre
aussi du couple électromagnétique Cem en
présence d'une rupture des barres rb0 à t=1s.
Aprés une phase transitoire, celui-ci répond
instantanément et suit la référence sans
dépassement ni erreur statique Cr=3.5 N.m a cause de la
structure du régulateur flou, les réponses des systèmes
sont caractérisées par les même faits :
la vitesse de référence est atteinte en 0,15 sec
environ lors de l'inversion de vitesse selon une rampe.
La figure (VI.29) illustre l'évolution temporelle en
régime transitoire et en régime permanent du courant statorique
en présence d'une rupture de barre rb0 à t=1s .
La figure (VI.30) illustre l'évolution temporelle en
régime transitoire et en régime permanent des courants de barres
Irb0 , Irb1 en présence d'une rupture de barre
rb1 à t=1s,et on observe le courant dans la barre
rb0, qui proche de Zéro a cause de la cassure . Les courants
circulant dans les barres adjacentes aux barres cassées sont très
supérieurs a leur valeur nominale. On conclut donc qu'il y a un risque
de défaillances en chacune dans la mesure ou les contraintes
électriques et thermiques sont redistribuées sur les conducteurs
adjacents.
On remarque que la vitesse dans la figure (VI.28) est obtenue
comme dans le régulateur PI et que l'évolution du couple, des
courants est également identique.
Lorsque on a une cassure de barre la durée d 'inversion de
la vitesse est plus importante mais il n'existe plus de dépassement
comme dans le cas d'un régulateur linéaire.
La réaction des régulateurs à logique
floue au moment d'application de charge est aussi caractérisé par
une variation plus petite et un temps plus court par rapport aux
régulateurs classiques
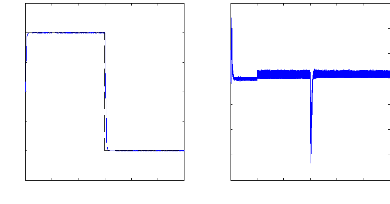
1500
1000
500
0
n (trim n)
-500
-1000
-1500
60
40
20
0
-20
C en (N .m )
-40
-60
-80
0 0.5 1 1.5 2 2.5 3
t(s)
0 0.5 1 1.5 2 2.5 3
t(s)
Figure (VI.28) : vitesse de rotation, couple
électromagnétique, simulation avec le modèle
réduit,
machine en défaut et en charge : rupture d'une barre
à t=1s
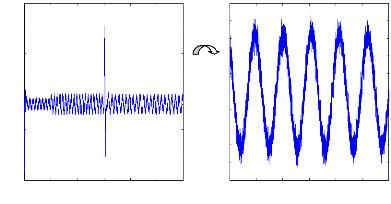
0 0.5 1 1.5 2 2.5 3
t(s)
1 1.05 1.1 1.15 1.2 1.25 1.3
t(s)
las (A )
-10
-20
-30
40
30
20
10
0
-1
-2
-3
-4
-5
5
4
3
2
0
1
zoom
las (A )
Figure (VI.29) : courant statorique, machine en défaut,
en charge Cr= 3.5Nm
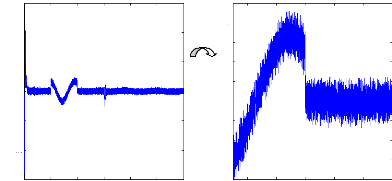
irb o (A )
-1000
-1500
1500
1000
-500
500
0
zoom
irb o (A )
-100
-150
-200
250
200
150
100
-50
50
0
0 0.5 1 1.5 2 2.5 3 0.8 0.9 1 1.1 1.2 1.3
t(s) t(s)
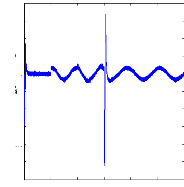
0 0.5 1 1.5 2 2.5 3
-
irb 1 (A )
-1000
-1500
-200 0
-250 0
-3000
2000
1500
1000
500
00
0
t(s )
Figure (VI.30) : Courants dans les barres rotoriques : Irb0,
Irb1, machine en
défaut, simulation avec modèle global,
rupture de la barre rb0 à t= 1s
b. Machine avec cassure de deux barres
La figure (VI.31) illustre l'évolution temporelle en
régime transitoire et en régime permanent du couple
électromagnétique Cem en présence d'une rupture
de barre rb0 a t=1s et rb1 a t=2s. Aprés une phase
transitoire, celui-ci répond instantanément et suit la
référence sans dépassement ni erreur statique
Cr=3.5 N.m a cause de la structure du régulateur flou, les
réponses des systèmes sont caractérisées par les
même faits :
la vitesse de référence est atteinte en 0,15 sec
environ lors de l'inversion de vitesse selon une rampe.
La figure (VI.32) illustre l'évolution temporelle en
régime transitoire et en régime permanent du courant statorique
en présence d'une rupture de barre rb0 à t=1s et
rb1 à t=2s .
La figure (VI.333) illustre l'évolution temporelle en
régime transitoire et en régime permanent des courants de barres
Irb0 , Irb1, en présence d'une rupture de barre rb0 à t=1s et rb1
à t=2s. Les courants circulant dans les barres adjacentes aux barres
cassées sont très supérieurs a leur valeur nominale. On
conclut donc qu'il y a un risque de défaillances en chacune dans la
mesure ou les contraintes électriques et thermiques sont
redistribuées sur les conducteurs adjacents.
Les effets de la cassure de barre (oscillation de w et
Cem) croit rapidement avec le nombre de barres cassé ;
d'où on observe:
- Augmentation de l'amplitude des oscillations. La grande
amplitude des oscillations accélère la
détérioration de la machine.
- L'amplitude des courants des phases statoriques. est
proportionnelle au nombre de barres cassées.
- Lors des défauts rotoriques, les courants dans les
barres cassées chutent pratiquement à
zéro, tandis que
les courants dans les barres voisines deviennent
déséquilibrés. Les
courants qui conduisaient les barres
cassées se répartit alors dans les barres voisines
Lorsque on a une cassure de barre la durée d 'inversion
de la vitesse est plus importante
mais il n'existe plus de dépassement comme dans le cas
d'un régulateur linéaire.
1500
1000
500
0
n (trim n )
-9 4 0
-960
-980
-1020
1 0 4 0
-
-1060
-1080
-1100
14 16 18 2 22 24
t(s
-500
-1000
-1500
0 0.5 1 1.5 2 2.5 3
t(s)
1 1 2 0
-1 1 4 0
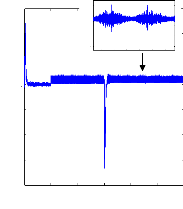
10
5
60
0
40
-5
0
2 1 2 2 2 3 2 4 2 5 2 6
t (s )
20
-40
-60
-80
0 0.5 1 1.5 2 2.5
t(s)
0
-20
C en (N .m )
Figure (VI.31) :vitesse de rotation, couple
électromagnétique et le courant
statorique, machine en charge
et en défaut : 2 barres cassées
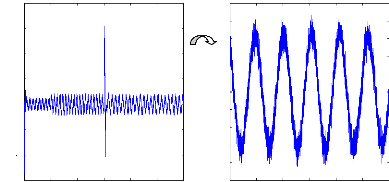
las (A )
-10
-30
40
30
20
20
10
zoom
las (A )
-1
-2
-3
-4
-5
5
4
3
2
0 0.5 1 1.5 2 2.5 3 1.05 1.1 1.15 1.2 1.25 1.3
t(s) t(s)
Figure (VI.32) :courant statorique, machine en charge et en
défauts, 2barres
cassées
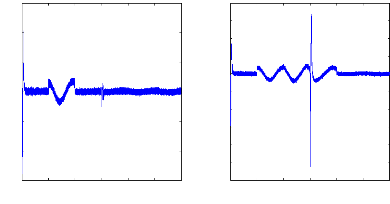
0 0.5 1 1.5 2 2.5 3
t(s)
!rbl )
-
-1000
-1500
-2000
-2500
-3000
2000
1500
1000
500
500
0 0.5 1 1.5 2 2.5 3
t(s)
irb o (A )
-1000
-1500
1500
1000
-500
500
Figure (VI.33) :courants dans les barres rotoriques : Irb0,
Irb1,Machine en charge et en défaut, simulation avec
modèle global : 1 barre cassée rb0 à t=1s, 2
barre cassée rb1 à t=2s
3. Variation de la charge
Pour 0.6s<t<3s, on applique un couple de charge de 3.5N.m
;
a l'instant t=2s, on applique un couple de charge
Cr=5.5N.m.
On constate également que les variations du couple de
charge n'ont aucune influence sur la réponse de la vitesse dans le cas
d'un régulateur flou (figure IV.34). Les figures (IV.34 à IV.35)
confirment aussi ces résultats.
On remarque que la vitesse est obtenue comme dans le
régulateur PI et que l'évolution du couple, des flux et des
courants est également identique. Les temps de réponse et
d'inversion de la vitesse sont respectivement égaux à 0.4 s et
0.45 s.
La réaction des régulateurs à logique
floue au moment d'application de charge est aussi caractérisé par
une variation plus petite et un temps plus court par rapport aux
régulateurs classiques
On constate également que ce correcteur offre une
réponse bien meilleure que celui du (PI ). Les dépassements et
les temps de réponse sont beaucoup plus faibles qu'avec un
régulateur classique.
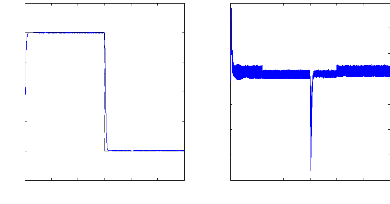
1500
1000
500
0
n (trim n )
-500
-1000
-1500
60
40
20
0
-20
C en (N .m )
-40
-60
-80
0 0.5 1 1.5 2 2.5 3
t(s)
0 0.5 1 1.5 2 2.5 3
t(s)
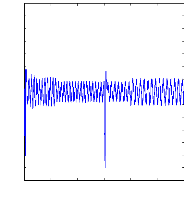
0 0.5 1 1.5 2 2.5 3
t(s )
las (A )
-10
-15
-20
-25
-30
-35
10
-5
5
0
35
30
25
20
15
Figure (VI.34) : vitesse de rotation, couple
électromagnétique,
variation de la charge.
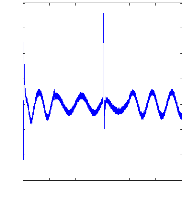
0 0.5 1 1.5 2 2.5 3
t(s)
irbo(A)
-1000
-1500
2000
1500
1000
-500
500
0
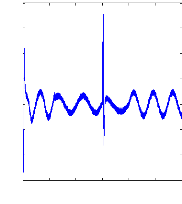
0 0.5 1 1.5 2 2.5 3
t(s)
irb 1 (A )
-1000
-1500
2000
1500
1000
-500
500
0
Figure (VI.36) : courants dans les barres rotoriques, Irb0,
Irb1
machine avec variation de charge, simulation avec modèle
global.
VI.7 Conclusion
Ce chapitre nous a permis d'étudier la structure
générale d'un contrôleur flou et la méthodologie de
sa conception, puis on a appliqué ce réglage sur la commande
vectorielle du modèle réduit du schéma multi-enroulements
de la machine asynchrone a cage d'écureuil avec ou sans défauts
rotoriques ( cassures de barres).
Une comparaison des résultats de simulation de la
commande de la machine asynchrone par des correcteurs classiques PI et un
correcteur flou a été faite. Compte tenu des résultats, le
PI flou semble pourvoir remplacer le PI conventionnel pour améliorer les
performances de ce dernier et donc du contrôle vectoriel.
Le PI Flou est très peu sensible aux variations des
paramètres du système, (en ce qui concerne les cassures des
barres, qui influes sur la résistance rotorique, ou l'augmentation est
de l'ordre de 11) ainsi qu'aux perturbations externes ce qui justifie sa
robustesse. Il permet d'obtenir des temps de montée très faibles
par rapport au PI classique grâce aux larges domaines physiques de la
variation de l'erreur et de la variation de commande.
Conclusion générale
Cette étude représente un apport dans le domaine
de diagnostic et surveillance des défauts rotoriques des machines
asynchrones a cage d'écureuil, à savoir la modélisation,
l'estimation des paramètres et la commande.
Nous avons opté pour une approche globale basée
sur la signature de grandeurs externes (couple, courant,..) utilisant un
schéma multi-enroulements bien adapté à la simulation des
défauts rotoriques envisagés. Dans une deuxième phase,
nous avons procédé à la transformation du modèle
multi-enroulements au modèle réduit, pour faciliter abondamment
l'étude. Toutes les équations sont écrites dans un
référentiel lié au rotor, vu que les défauts sont
situés justement à son niveau.
Le modèle obtenu permet de simuler efficacement les
défauts de cassure de barres et de suivre aussi l'évolution des
grandeurs externes (couple, courant,...). Cette analyse a permis de voir le
comportement du moteur et d'en déduire les signatures
caractéristiques des défauts. Etant donné qu' il est
difficile d'analyser directement le courant statorique lors de la rupture de
barres, nous avons basé sur l'analyse spectrale du courant statorique,
qui nous a révélé les défauts des cassures des
barres par des harmoniques à la fréquence.
L'étude de la commande de la machine asynchrone par la
méthode du flux orienté indirecte avec un réglage
classique, nous a permis de simuler le comportement du système global,
avec et sans défauts rotoriques. Les résultats obtenus ont
montré l'influence des ruptures de barres sur le couple
électromagnétique, la vitesse de rotation et le courant
statorique, qui se traduit par des ondulations et déformations des
allures.
Il faut signaler que le régulateur de type P.I ne
permet pas en tout cas de maîtriser le régime transitoire. En
outre, la faiblesse de la commande vectorielle, se traduit par l'apparition
d'une pointe de courant très gênante pour le bon fonctionnement de
la machine.
Nous avons abordé également le suivi des
paramètres de la machine sensibles aux défauts à savoir
les résistances des barres rotoriques et les courants, en utilisant
l'observation stochastique par filtre de Kalman étendu dont l'objectif
de détecter la présence des défauts. L'approche
proposée a été suffisamment simplifiée par
l'exploitation dans les simulations du modèle réduit du
schéma multi-enroulements de la machine asynchrone à cage
d'écureuil.
Au terme de cette étude, les résultats obtenus
montre la faisabilité de la commande par la logique floue
appliquée au problème de la régulation en vitesse de la
machine asynchrone en présence de défauts rotoriques.
Comparé au régulateur classique, le comportement
général du régulateur de vitesse reste similaire.
Cependant, le détail des résultats de simulation met en
évidence une amélioration locale du réglage de la vitesse,
associé à des qualités de robustesse satisfaisantes.
En perspective, on pourrait appliquer différentes
méthodes du diagnostic pour la détection et la localisation des
défauts de la machine asynchrone, en utilisant les signatures des
grandeurs électriques et mécaniques qui peuvent être
obtenues à partir du modèle étudié.
Néanmoins, les efforts de modélisation doivent
être poursuivis pour inclure ou préciser un certain nombre de
phénomènes physiques supplémentaires. Il serait
intéressant de prendre en compte la perméabilité finie du
fer, et les pertes fer ainsi que la saturation.
Ces phénomènes physiques non ou mal pris en
compte affectent très sérieusement les performances du
modèle. Par ailleurs, il serait intéressant d'étendre le
modèle a l'étude des vibrations. Ces dernières offrent en
effet des signatures de défaillances intéressantes dans le cadre
de la surveillance et du diagnostic.
Annexe
Paramètres de la machine
étudiée
Plaque signalétique : Constructeur ABB
U : 220 /380 V.
In = 4. 5 / 2. 6 A.
? n = 2850tr/min Pn = 1 . 1
KW
Les paramètres :
Rs = 7. 828 ?
J= 0 . 006093 Kg m2 f = 0 .
00725 Nm s/rd Rayon = 0.03575 m
Longueur = 0.065m Entrefer = 0.00025 m Ns =
160
Nr = 1 6
|
Lsl = 0 .0 1 8 H R bsain 150 10
=
R = 0. 00165 ?
|
-6
|
?
|
|
Re 72 10
=
|
-6
|
?
|
Lb = 10- 7 H
Le =
10- 7 H
Bibliographie
[1] V. Devanneaux, Modélisation des machines asynchrones
triphasées à cage d'écureuil en vue de la surveillance et
du diagnostic. Thèse de doctorat en génie électrique,
Institut National Polytechnique de Toulouse, décembre 2002.
[2] R. Casimir, « Diagnostic des défauts des
machines asynchrones par reconnaissance des formes.», thèse de
doctorat, l'école doctorale électronique,
électrotechnique, automatique de Lyon, décembre 2003.
[3] T. Boumegoura, « Recherche de signature
électromagnétique des défauts dans une machine asynchrone,
et synthèse d'observateurs en vue du diagnostic.», thèse de
doctorat, l'école doctorale électronique,
électrotechnique, automatique de Lyon, Mars 2001.
[4] L. Baghli, « Contribution à la commande de la
machine asynchrone, utilisation de la logique floue, des réseaux de
neurones et des algorithmes génétiques.», thèse de
doctorat, université Henri Poincaré, Nancy, janvier 1999.
[5] Gilles Zwingelstein, « Diagnostic des
défaillances : théorie pratique pour les systèmes
industriels.», Edition Hermès.
[6] R. Aabdessamed et M. kadjoudj, « Modélisation
des machines électriques.», presse de l'université de Batna,
1997.
[7] S. Amrane, « Diagnostic de défauts des moteur
d'induction.», thèse de magister, Université A. Mira de
Bejaia 2000.
[8] A. Boughaba, « Contribution à l'étude du
contrôle d'une machine à induction :analyse d'algorithme de la
commande vectorielle.», thèse de magister, Université de
Batna, 1998.
[9] D. Gaetan et R. hubert,« Sur la détection d'un
défaut au rotor des moteurs asynchrones.» Article, GREEN-UHP
faculté des sciences, décembre 2001.
[10] J. Colomer,« Essais de synthèse des
méthodes de C.N.D (contrôle non destructif).», revue pratique
de contrôle industriel, Mars 1990.
[11] W. Deleroi,« Broken bar in squirrel -cage rotor of an
induction motor: Description by super imposed faults current.», Archive
fur electrotechnik, 67, 84, p 91-99.
[12]Jean FAUCHER, Bruno DAGUES Traitement de l'Information pour
la Modélisation, la Surveillance et le Diagnostic (TIMSuD)
[13]. Detecting Broken Rotor Bars Prevents Catastrophic Damage,
Copyright (c) 1998-2004 Maintenance Technology - All rights reserved.
[14].S. Colombri,« Design and Simulation of mechatronic
application and power electronics with Matlab/Simulink », EPFL, LEI,
Lausanne 1996.
[15] E. Ritchie, X. Deng and T. Jokinen,« Dynamic model of
three-phase squirrel cage induction motors with rotor faults.», in proc
ICEM 94.
[16] M. Jufer et A. Abdelaziz,« Influence d'une rupture de
barre ou anneau sur les caractéristiques externes d'un moteur asynchrone
à cage.», Article, 5 sep 1978.
[17] E. schæffer,« Simulation et diagnostic de la
machine asynchrone.», rapport, Ecole centrale de Nantes 1998.
[18] E. Schaeffer. Diagnostic des machines asynchrones :
modèles et outils paramétriques dédies a la simulation et
a la détection de défauts. Thèse de doctorat en
automatique et informatique appliquée, Université de Nantes,
décembre 1999.
[19] Scott Wade, Matthew W. Dunnigan, and Barry W. Williams
.Modeling and Simulation of Induction MachineVector Control with Rotor
Resistance Identification, IEEE transactions on power electronics, vol. 12, NO.
3, MAY 1997
[20] Eltabach Mario, Charara Ali, Zein Ismail. Detection of
induction motors broken bars by electromagnetic torque estimation using kalman
filtering, HEUDIASYC UMR 6599 - LATIM Université Technologie de
Compiègne BP 20529, 60205 Compiègne Cedex Compiègne,
France
[21] Ming Xu and Tom Alford, Motor current analysis and its
applications in induction motor fault diagnosis, ENTEK IRD International
Corporation 1998
[22] Zein Ismail,Jean claude Trigeassou,Slim Tnani,
Sébastien Cauet, Diagnostic des défauts statoriques et rotoriques
par identification paramétrique sans capteur de vitesse, Laboratoire
d'Automatique et d'informatique industrielle, Ecole supérieure
d'Ingénieurs de Poitiers, Conférence internationale francophone
d'Automatique, juillet 2002.
[23] G. H. Jang, Member, IEEE, and S. J. Park. Simulation of the
Electromechanical Faults in a Single-Phase Squirrel Cage Induction Motor, IEEE
TRANSACTIONS ON MAGNETICS, VOL. 39, NO. 5, SEPTEMBER 2003
[24]Jafar Milimonfared, Homayoun Meshgin Kelk, Subhasis Nandi,
Artin Der Minassians, Member, IEEE, and Hamid A. Toliyat, A Novel Approach for
Broken-Rotor-Bar Detection in
Cage Induction Motors, IEEE TRANSACTIONS ON INDUSTRY
APPLICATIONS, VOL. 35, NO. 5, SEPTEMBER/OCTOBER 1999
[25] Arezki Menacer, Mohamed-Said Naît Said, A/Hamid
Benakcha, Said Drid stator current analysis of incipient fault into
asynchronous motor rotor bars using Fourier fast transform, Journal of
ELECTRICAL ENGINEERING, VOL. 55, NO. 5-6, 2004, 122-130
[26] Smail BACHIR, Contribution au diagnostic de la machine
asynchrone par estimation paramétrique, Thèse de doctorat, Ecole
supérieure d'Ingénieurs de Poitiers, décembre 2002
[27] MOHINDER S. GREWAL , ANGUS P. ANDREWS, Kalman filtering :
theory and practice using Matlab, California state university at fullerton,
2001
[28] Abdelkader Larabi, Mohamed Seghir Boucherit, Commande
numérique robuste appliquée aux systèmes industriels de
production, Laboratoire d'Electrotechnique et Automatique ENPA El-harrach
Alger,
[29] Mouloud Azzedine Denai, Sid Ahmed Attia, Fuzzy and neural
control of an induction motor, University of Science and Technology of Oran,
Faculty of Electrical Engineering B.P. 1505 El Mnaouar, Oran 31 000, Algeria,
2001
[30] Dr M N Bandyopadhyay, Fellow, Extended Kalman Filter
Approach to Joint State and Parameter Estimation, November 2003
[31] David HENRY ,Diagnostic et contrôle
de cohérence des systèmes multivariables incertains. Novembre
1999 , l'Université Bordeaux I
[32]D.Khodja, L.Yahia, Identification des défauts de la
machine asynchrone à cage d'écureuil dans sa partie
rotorique.mémoire d'ingénieur d'état, université de
M'sila.
[33] M. LAJOIE-MAZENC, Les techniques de commande vectorielle
des machines asynchrones destinées à la variation de vitesse
à haute performance "
Rapport EDF - Janvier 1992
[34] BIMAL K.ROSE, Ajustable speed AC drive systms" Edition
I.E.E.E press 1980
[35] F.BLASCHKE, The principle of field orientation as applied
to the new transvector closed-loop control system of rotating field machine.
Siemens review- vol 34 may 1971, p 217-220
[36] Y.FU, Commandes découplées et adaptatives des
machines asynchrones
triphasées,Thèse de Docteur Université de
Montpellier II- Mars 1991
[37] M.PIETRZAK, Algorithme de commandes d'un variateur
électrique asynchrone -
contrôle dynamique du flux - contrôle optimale de la
position.
Thèse de doctorat és-sciences I.N.P TOULOUSE 8
juillet 1988
[38] G.A CAPOLINO, H.HENAO, V.T NGUEN PHUOC, Méthode de
conception d'une commande vectorielle pour machine à induction,
Journée d'études SEE sur la commande vectorielle des moteurs
asynchrones,2 décembre 1992
[39] O.HNISHI KOUSHEL, LIEDA YOUZOU, MYYACHI KUNIO, Model
référence adaptive system against rotor resistance variation in
induction motor Drive,I.E.E.E Trans.Ind.electronics, vol.IE-33, N°3, aug
1986, pp.217-3223
[40] A. FAIDALLAH, Contribution à l'identification et
à la commande vectorielle des machines asynchrones, Thèse de
Docteur INP Lorraine - 1 Février 1995
[41] K. YAZID, Commande vectorielle de la machine asynchrone
avec prise en compte des variations de la constante de temps rotorique,
Thèse de Magister USTHB - Juin 1996
[42] B. DEMAYA, Commande floue des systèmes à
dynamiques complexes- Application à la commande d'un moteur thermique,
Thèse de Docteur LAAS Toulouse - 17 Octobre 1994
[43] S.GHOZZI, M.GOSSA, M. BOUSSAK, A.CHAARI, M. JEMLI,
Application de la logique floue pour la commande vectorielle des machines
asynchrones, J.T.E.A. 1996- p 177-182
[44] M. BAUER ,Application de contrôleurs à
logique floue pour la commande vectorielle des machines à induction:
commande en vitesse et en position , Rapport de stage ingénieur- ESIM-22
Février 1995
[45] A.IBALIDEN, Implantation d'un régulateur de type
flou sur des commandes d'onduleurs pilotant des machines alternatives :
application à la détermination des correcteurs , Rapport
d'activités 1994-1995
[46] J.P.Caron-J.P.Hautier,«Modélisation et commande
de la machine asynchrone.», Edition technique1995
[47]C.L.Philips and H.T.Jr.Nagel,« Digital control system :
Analysis and Design.», Printice- Hall, inc, 1984.
??
11 11
|
??? ÉÜ ??? ÉÜ ? ? . ??? ?
áÇÌÇ ? ? ? ? áÊÍÊ ????? ?
? ???? ? ?? ? ?
á ÜÎ Ü CM ÇÜ ??
ÇÏÜ ? ????? ? ?? ???? ? ??? ????? ??? ????? ?? ?
. ? ? áÇØÚ ? ? ????? ??? ??? ? ?
????? ? ??? ? ??? ??????? ????? ??????
??? ? ?????? ???? ? ???? áÌÇ ? ??? ? ??
????? ? ????? ? ? ???
. áÇØÚ ????? ??? ? ? ? ? ? ?? ????
áÌ ??? ? ???? ??? ?? ? ? ? , ???? ?
?? ? ???? ??? ????? ? ???? áÇÌ ? ???? ? ??
????? ? ? ? ??? ???
|
|
? Ü ? ? , ??? ?? ???
|
???
|
????
|
???? ? ? ?? ?
|
???? ? ???
|
? ??????
|
????? ?
|
|
. ??? ? ? ????? ??? áÎ
|
?? ??? ??
|
???
|
? ????
|
???
|
???????
|
????
|
|
????? ??CM ??? ?? ??
|
, ???? ? ? ? ?? ?
|
?? ??
|
?
|
???
|
???
|
?? ???
|
|
??? ? . ???? ? ???
|
? ??????
|
????? ?
|
?? ??? ?
|
?????
|
???
|
? ?
|
????? ?
|
|
|
. ??
|
??
|
?????
|
? ? ??? ?
|
????
|
? ? ?
|
???
|
|
|
????? ????
|
|
|
|
|
|
|
????? ? ? ? ??
|
???
|
??
|
??? ?
|
????????
|
????
|
???
|
? ???
|
? ? ?
|
|
|
|
|
|
|
???? ? ???
|
? ??????
|
|
|
|
Résumé
|
|
|
|
|
|
|
Les machines electriques tournantes occupent une place
preponderante dans tous les secteurs industriels. Les machines asynchrones
triphasees a cage d'ecureuil sont les
plus frequemment utilisees grâce a leur robustesse, leur
simplicite de construction et leur bas coût. Neanmoins, celles-ci
subissent au cours de leur duree de vie un certain nombre de sollicitations
externes ou internes qui peuvent les rendre defaillantes.
On propose une modelisation du schema multi enroulements de la
machine asynchrone permettant d'apprehender son comportement en presence ou en
absence de defaillances.
Dans l'étape d'estimation des paramètres, on
propose le suivi des paramètres sensible aux défauts, à
savoir les courants rotoriques et les résistances des barres rotoriques,
en utilisant le filtre de Kalman étendu.
Nous nous sommes intéressés a la commande
vectorielle indirecte d'une machine asynchrone utilisant les régulateurs
PI et par logique flou en tenant compte de la présence d'un
défaut rotorique . Une analyse par simulation met en évidence les
bonnes performances et la robustesse de la commande par régulateur
flou.
Mots-clés
Machine asynchrone- Diagnostic - schéma multi
enroulements- Rupture de barre -Commande vectorielle - Logique floue
Abstract
Rotating electrical machines play an important role in the
industrial world. Among
them, the three-phase squirrel cage asynchronous machines are
frequently used because of their robustness, their relatively simple
construction and their low cost. Nevertheless, during their lifespan, these
machines are submitted to external and internal stresses which can lead to
several failures.
We propose the modelling of the diagram multi windings of the
asynchronous machine allowing apprehending his behavior in presence or absence
of failures.
In the stage of estimate of the parameters, one proposes the
follow-up of the parameters sensitive to the defects, namely the rotor currents
and resistances of the rotor bars, by using the Extended Kalman filter.
We were interested in the indirect field oriented control order
of an asynchronous machine uti reading regulators PI and by fuzzy logic blur by
taking account of the presence of a rotor
defect. An analysis by simulation highlights the good
performances and the robustness of control command by fuzzy regulator
Keywords
Asynchronous machine - Diagnostic - multi windings - Broken bar-
field oriented control-Fuzzy Logic- Extended Kalman filter
| 

