|
UNIVERSITE PAUL CEZANNE
D'AIX-MARSEILLE
(AIX-MARSEILLE III)
N° attribué par la bibliothèque
| 2 |
0 | 0 | 8 | A | I | X | 3 | 0 | 0 | 6 | 8 |
TITRE :
ETUDE DE LA STABILITE AUX PETITES
PERTURBATIONS DANS
LES GRANDS RESEAUX ELECTRIQUES : OPTIMISATION DE
LA
REGULATION PAR UNE METHODE METAHEURISTIQUE
THESE
Pour
obtenir le grade de :
DOCTEUR DE L'UNIVERSITE PAUL CEZANNE
D'AIX-MARSEILLE
Faculté des Sciences et Techniques
Discipline : Génie
Electrique
Présentée et soutenue publiquement par
:
Hasan ALKHATIB
Le 5 décembre 2008
Directeurs de thèse : Marcel PASQUINELLI / Jean
DUVEAU
JURY :
Mr. Shahrokh SAADATE Rapporteur
Mr. Mohamed MACHMOUM Rapporteur
Mr. Seddik BACHA Examinateur
Mr. Jean DUVEAU Examinateur
Mr. Marcel PASQUINELLI Directeur de
thèse
Mr. Michel THOLOMIER Membre invité
RESUME :
Depuis une vingtaine d'années, les grands
réseaux électriques se trouvent obligés de fonctionner
à pleine puissance et souvent aux limites de la stabilité.
L'amélioration de la stabilité aux petites perturbations, en
particulier l'amortissement des oscillations interrégionales, est donc
devenue un objectif prioritaire. Les interactions entre les
générateurs de différentes régions et les
régulateurs utilisés nécessitent une optimisation globale
de leurs performances : c'est le meilleur moyen pour assurer le comportement
optimal de l'ensemble. L'objectif de notre travail est d'assurer un
amortissement maximum, aussi bien des modes interrégionaux que des modes
locaux, à l'aide des stabilisateurs de puissance (PSS)
généralement utilisés pour l'amortissement des modes
électromécaniques locaux. Pour ce faire, nous avons
développé une méthode d'optimisation globale basée
sur les algorithmes génétiques et une fonction multiobjectif
utilisant les paramètres de stabilité relative et de
stabilité absolue déterminés à partir de l'analyse
des valeurs propres du système. Nous avons analysé l'influence de
l'augmentation progressive du nombre de variables à optimiser
simultanément (paramètres des PSSs, emplacement et nombre de ces
derniers). La méthode que nous proposons permet un réglage
optimal des PSSs avec la meilleure localisation possible et un nombre
réduit de PSSs. Nous avons proposé en outre une nouvelle
méthode d'optimisation utilisant des contraintes dynamiques adaptatives
de l'espace de recherche afin d'améliorer les performances et la
rapidité de convergence de cet algorithme. Les performances de ces
méthodes d'optimisation ont été évaluées sur
le réseau multimachines interconnecté New England/New York par
analyse des valeurs propres du modèle linéaire du système
et simulations temporelles du modèle non-linéaire
originel.
MOTS CLEFS : Réseaux
électriques, Stabilité aux petites perturbations, Stabilisateurs
de puissance, Régulation, Optimisation globale, Algorithmes
génétiques.
TITLE:
SMALL SIGNAL STABILITY STUDY IN POWER SYSTEM: OPTIMIZATION OF THE
REGULATION BY A METAHEURISTIC METHOD.
ABSTRACT:
Over the past two decades, electric utilities operate
their power systems at full power and often closer to their stability limits.
The small signal stability improvement, in particular the damping of inter-area
oscillations, has become, therefore, a priority. Interactions between the
generators of different regions and their regulators require a global
optimization of their performances: this is the best way to ensure the whole
optimal behaviour. Our work objective is to ensure a maximum damping of the
inter-area modes as well as of the local modes, using power system stabilizer
(PSS) that is habitually used in the damping of electromechanical local modes.
Thus, we have developed a global optimization method based on genetic
algorithms and a multiobjective function using relative and absolute stability
parameters that are obtained of the system eigenvalue analysis. We have
analyzed the influence of the gradual increase of the variable number that to
be optimized simultaneously (PSS parameters, their location and number). The
proposed method allows an optimal setting of PSSs with the best possible
location and a reduced number. We have also proposed a new optimization method
using dynamic search space. This can improve the optimization performance as
well as the convergence acceleration. The performance of these optimization
methods has been evaluated on the New England/ New York multimachine system via
linear model eigenvalue analysis, and non-linear time domain
simulations.
KEYWORDS: Small signal stability, Power
system stabilizer, Global optimization, Genetic Algorithms, Linear system
analysis.
Remerciements
J'ai débuté ce travail au laboratoire
Compatibilité Electromagnétique de Marseille (LaCEM) sous la
direction de Monsieur Michel THOLOMIER, que je tiens à remercier pour
m'avoir accueilli au sein de son laboratoire. Suite au départ de
Monsieur THOLOMIER à la retraite et la fermeture du laboratoire, je fus
à la recherche d'un autre laboratoire qui me permettrait de continuer
mon travail. Monsieur Marcel PASQUINELLI a accepté avec beaucoup de
gentillesse et de générosité de prendre la direction de ma
thèse et de m'aider à terminer mon étude dans les
meilleures conditions possibles. C'est pourquoi je tiens à lui exprimer
mon extrême reconnaissance pour son soutien moral et son aide
précieuse.
Pour avoir accepté de présider le jury, je tiens
à remercier Monsieur Seddik BACHA, Professeur des
Universités au Laboratoire G2Elab de INP de Grenoble, et d'avoir
porté la plus grandes des attentions à mon travail.
Je tiens également à remercier Monsieur Shahrokh
SAADATE, Professeur des Universités au Laboratoire GREEN de
l'Université Nancy1 et Monsieur Mohamed MACHMOUM, Professeur des
Universités au Laboratoire IREENA de l'Université de Nantes pour
l'intérêt qu'ils ont porté à mes travaux en
acceptant d'en être rapporteur.
Je tiens à remercier du plus profond de mon coeur Jean
DUVEAU, mon cher et précieux coencadrant, aussi incroyable sur le plan
humain que professionnel. Ton empreinte dans ce travail est remarquable, ta
présence en particulier dans la dernière phase de ma thèse
et la préparation de ma soutenance on était indispensable pour
réussir dans cette difficile mission. En outre l'aide que tu m'as
apporté, ton esprit "d'expérimentation" m'a donné une
autre vision sur mon travail et sur la relation recherche-expérience. Tu
as une qualité rare de nos jours, tu es un homme de parole.
Je tiens à remercier Monsieur THOLOMIER et Monsieur
CHOUCHA de m'avoir apporté aide et soutien moral. Mes meilleures
pensées vont également vers Monsieur TOLBA qui m'a aidé
sincèrement au démarrage de ma thèse.
Sans bien-sûr oublier, lors de mon passage au
laboratoire, la bonne humeur et l'ambiance chaleureuse qu'on sut créer
Chafik et Raluka. Je vous en remercie vivement.
Quant aux amis, que puis je dire ici pour les remercier ? Ils
ont tous été des soutiens d'exception. J'envoie vers eux cette
phrase de Gibran KHALIL GIBRAN : « Et que dans la douceur de
l'amitié réside la joie et le partage des plaisirs. Car dans la
rosée des menues choses le coeur trouve son matin et se ranime.
»
Douce et gentille Michèle, tu resteras toujours le seul
témoin des tracas et des joies qui ont parsemés mes trois
années de thèse. Le hasard n'existant pas, notre amitié
devait être depuis longtemps inscrite dans ma destinée comme une
ancre. Même si en amitié rien ne se compte, je te dois beaucoup.
Je vous serais à jamais reconnaissant pour m'avoir ouvert les bras. Toi
et Jo m'avez offert un cadeau inestimable : une famille.
Sabrina, je ne te dis pas merci, un remerciement ne serait pas
suffisant. Le goût de l'amitié est tellement différent avec
toi ! Ta JOIE, ton esprit, ta passion pour les cultures du monde, ta
curiosité sont des qualités que j'apprécie chaque jour. Je
n'oublierais jamais ton aide précieuse dans la partie la plus difficile
de cette thèse : les remerciements.
Rafif, Rawya et leur petit ange Zina, une famille
merveilleuse. Mes premiers jours à Marseille ont été
marqués par votre rencontre. Avec vous, je suis toujours inondé
par la joie de l'amitié. Que de bons souvenirs avec vous, des
Narguilés en hiver, des balades en été et les sourires et
les rires de Zina. En bref, du réconfort.
Cher Abou-Ziad, Professeur Fouad, de tes montagnes
grenobloises, tu as été mon premier soutien en France et le rayon
de soleil de notre ville natale, Salamieh dont Mohammed ALMAGHOUT parlait ainsi
: « Cette ville réside dans mon sang. »
Notre amitié, nos échanges culturels sont des
richesses inestimables pour moi. Chez toi, j 'ai rencontré une famille,
un grand ami et un grand frère. Un esprit ouvert et cultivé, avec
au coeur des projets extraordinaires. Que notre ville puisse un jour profiter
de tes desseins.
Sawsan, la distance n'a jamais affaibli notre amitié.
De la Syrie à Lille en passant par Lyon, tu restes une fille très
audacieuse et pleine d'ambition. Tu mérites le meilleur de la vie. Je te
serais toujours reconnaissant pour ton amitié.
Je n'oublierais pas mes amis de Grenoble. Nigar et sa famille
merveilleuse, Navaz, Chemir, Khaled, ... Je vous remercie chaleureusement pour
votre amitié, gentillesse, soutien et les tonnes de moments inoubliables
que nous avons passés ensemble.
Ma famille, que deviendrais-je sans vous ? Je ne serais pas
là où j'en suis sans votre soutien. Des encouragements, sans
cesse renouvelés, au moment les plus difficiles dans tout mon parcours,
vous avez sans relâche cru en moi. Malgré la distance, j'ai
toujours senti votre amour et votre présence à mes
côtés. Papa, maman, mes frères, mes cousins et ma cousine
Huda dit Hadhood, mes oncles, mes tantes, ma tante Chahrow, mon
grand-père et ma grand- mère, mes beaux-parents, vous êtes
nombreux mais une seule grande famille. Un amour et une joie infinis.
Sarab, mon amour eternel que j 'ai attendu depuis toujours. Au
moment où je n'espérais plus, notre amour est né ...
« Mais l'amour n'est-elle pas un cadeau que l'on reçoit quand on ne
s'y attend pas ? » comme le dit Ahlam MOSTEGHANEMI.
Depuis, j'ai une vie plus belle que je ne l'aurais jamais
rêvé. Aucun mot n'est assez fort pour te témoigner ma
reconnaissance. Grâce à toi, toute ma peine pour conclure ce
travail a été particulièrement adoucie. Le bonheur avec
toi n'est pas une destination mais une trajectoire.
Table des matières
INTRODUCTION GENERALE 8
Chapitre I : Modélisation du système de
puissance 12
1.1- Introduction. 13
1.2- Les phénomènes dynamiques.
14
1.2.1 - Les phénomènes de propagation. 15
1.2.2- Les phénomènes
électromagnétiques 15
1.2.3- Les phénomènes
électromécaniques. 15
1.2.4- Les phénomènes thermodynamiques. 15
1.3- Le modèle général
non-linéaire 16
1.3.1- Introduction 16
1.3.2-Les éléments du modèle. 17
1.3.2.1- Modèle du générateur. 17
1.3.2.1.1- Modèle de la machine synchrone dans le
repère de Park. 17
1.3.2.1.2- Les hypothèses du modèle.
19
1.3.2.1.3- Equations électriques. 20
1.3.2.1.4- Equations mécaniques. 21
1.3.2.1.5- Régulation du générateur.
23
1.3.2.1.5.1- Régulateur de fréquence et
modèle du turbine. 23
1.3.2.1.5.2- Régulateur de tension et modèle du
système d'excitation. 25
1.3.2.2- Réseau de transport. 27
1.3.2.2.1- Modèle de transformateurs. 27
1.3.2.2.2- Modèle des lignes de transmission.
28
1.3.2.3- Modèle des charges. 29
1.3.2.4- Mise en équations du réseau de transport.
30
1.3.3- Les équations d'état
généralisé du modèle. 32
1.4- Le modèle linéaire. 35
1.4.1- Introduction : Linéarisation du modèle 35
1.4.2- Application au système de puissance 37
1.4.3- Analyse du modèle linéaire 37
1.4.3.1- Introduction. 37
1.4.3.2- Valeurs propres. 37
1.4.3.3- Analyse modale 40
1.4.3.3.1- Vecteurs propres. 40
1.4.3.3.2- Facteur de participation. 41
1.4.3.3.3- Résidus. 43
1.5- Conclusion. 44
Chapitre II : Stabilité du système de
puissance 46
2.1- Introduction. 47
2.2- La stabilité au sens de Lyapunov
47
2.2.1 - Définitions de la stabilité. 47
2.2.1.1- Stabilité du point d'équilibre. 48
2.2.1.2- Stabilité asymptotique 48
2.2.1.3- Stabilité exponentielle 49
2.2.2- Méthodes d'analyse de stabilité au sens de
Lyapunov. 49
2.2.2.1 - Première méthode de Lyapunov
(méthode indirecte). 49
2.2.2.2- Deuxième méthode de Lyapunov
(méthode directe). 50
2.2.3- Conclusion. 51
2.3- Les différents types de la stabilité
de système de puissance. 51
2.3.1 - La stabilité de l'angle de rotor. 53
2.3.1.1- Introduction. 53
2.3.1.2- Stabilité angulaire aux grandes perturbations
(stabilité transitoire). 54
2.3.1.3- Stabilité angulaire aux petites perturbations
(stabilité dynamique). 59
2.3.2- La stabilité de tension. 59
2.3.3 - La stabilité de fréquence. 61
2.3.4- Conclusion. 62
2.4- Etude de la stabilité angulaire aux petites
perturbations 62
2.4.1 - Introduction. 62
2.4.2- Variation de couple électromagnétique 63
2.4.2.1- Couple synchronisant TS. 63
2.4.2.2- Couple d'amortissement TA. 64
2.4.3- Influence du système d'excitation sur la
stabilité angulaire. 64
2.4.3.1- Influence sur la stabilité transitoire 65
2.4.3.2- Influence sur la stabilité dynamique. 66
2.4.4- Les différents types d'oscillations à
faibles fréquences 67
2.4.4.1 - Les oscillations des modes locaux. 67
2.4.4.2- Les oscillations des modes globaux. 68
2.4.4.3- Les oscillations des modes de contrôle. 69
2.4.4.4- Les oscillations des modes de torsion. 69
2.4.4.5- Conclusion. 69
2.4.5- L'amortissement. 69
2.4.5.1- Fonctionnement et modèle de PSS. 70
2.4.5.2- Réglage des paramètres de PSS. 73
2. 4.5.2.1- Méthode de compensation de phase.
73
2. 4. 5. 2.2- Méthode du résidu 75
2. 4. 5. 2. 3- Méthode de placement des pôles
76
2.4.5.3- Emplacement optimal des PSSs 77
2.5- Conclusion. 78
Chapitre III : Optimisation par algorithmes
génétiques 80
3.1- Introduction. 81
3.2- Les Algorithmes Génétiques (AGs).
84
3.2.1- Introduction. 84
3.2.2- Codage et initialisation. 86
3.2.3 - Fonctions objectif et de performance. 88
3.2.3.1- Fonction objectif. 88
3.2.3.2- Fonction de performance. 89
3.2.4- Sélection 90
3.2.4.1- Sélection par la roulette biaisée. 90
3.2.4.2- Sélection par tournoi. 92
3.2.4.3- Conclusion. 93
3.2.5- Croisement. 93
3.2.5.1- Croisement seul point. 94
3.2.5.2- Croisement multipoints. 95
3.2.5.3- Croisement uniforme. 96
3.2.6- Mutation. 96
3.2.7- Création de la génération suivante et
critères d'arrêt 98
3.2.8- Compromis exploration et exploitation. 99
3.2.9- Paramètres de réglage de l'AG. 99
3.3- Conclusion. 100
Chapitre IV : Applications 102
4.1- Introduction. 103
4.2- Réseau étudié. 104
4.2.1- Caractéristiques du réseau
étudié. 104
4.2.2- Caractérisations d'un défaut 104
4.3- Analyse de la performance et critères de
bonne régulation. 106
4.3.1 - Critères d'analyse du modèle
linéaire 108
4.3.2- Critères de simulation. 109
4.3.2.1- Critères temporels instantanés. 109
4.3.2.2- Critères temporels intégraux. 111
4.3.3- Conclusion. 111
4.4- Développement de l'AG 112
4.4.1 - Introduction. 112
4.4.2- Fonction objectif. 112
4.4.3- Mise en oeuvre de l'AG. 113
4.4.3.1- Codage du problème. 113
4.4.3.2- Population initiale. 114
4.4.3.3- Sélection 115
4.4.3.4- Croisement. 115
4.4.3.5- Mutation. 115
4.4.4- L'organigramme du problème. 115
4.4.5- Conclusion. 115
4.5- Résultat et discussion. 116
4.5.1- Le système sans PSSs. 116
4.5.2- Les scénarios et défauts. 119
4.5.3- Cas 1 : optimisation des
paramètres des PSSs 120
4.5.3.1- Localisation des PSSs. 120
4.5.3.2- Réglage des paramètres des PSSs par l'AG
122
4.5.3.3- Analyse des valeurs propres 125
4.5.3.3.1- Le point de fonctionnement nominal. 125
4. 5.3. 3.2- Les autres scénarios. 132
4.5.3.4- Analyse par simulations temporelles. 133
4.5.3.4.1- Le point de fonctionnement nominal. 133
4. 5.3. 4.2- Les autres scénarios. 136
4.5.3.5- Conclusion. 136
4.5.4- Cas 2 : optimisation des
paramètres et de la localisation des PSSs 137
4.5.4.1- Application des AGs. 137
4.5.4.2- Analyse des valeurs propres 140
4.5.4.2.1- Le point de fonctionnement nominal. 140
4. 5. 4. 2.2- Les autres scénarios. 141
4.5.4.3- Analyse par simulations temporelles. 142
4.5.4.3.1- Le point de fonctionnement nominal. 142
4. 5. 4. 3.2- Les autres scénarios. 144
4.5.4.4- Discussion et conclusion. 146
4.5.5- Cas 3 : optimisation globale des PSSs
147
4.5.5.1- Application des AGs. 147
4.5.5.2- Analyse des valeurs propres 150
4.5.5.2.1- Le point de fonctionnement nominal. 150
4. 5.5.2.2- Les autres scénarios. 151
4.5.5.3- Analyse par simulations temporelles. 153
4.5.5.3.1- Le point de fonctionnement nominal. 153
4. 5.5. 3.2- Les autres scénarios. 155
4.5.5.4- Evaluation du nombre de modes dans les trois cas.
156
4.5.5.5- Discussion et conclusion. 157
4.5.6- Influence des contraintes de l'AG dans l'optimisation :
application au troisième cas 158
4.5.6.1- Application des AGs. 158
4.5.6.2- Analyse des valeurs propres pour le point de
fonctionnement nominal. 160
4.5.6.3- Analyse par simulations temporelles pour le point de
fonctionnement nominal. 1161
4.5.6.4- Discussion et conclusion. 162
4.6- Conclusion. 162
Chapitre V : Optimisation par algorithmes
génétiques à contraintes dynamiques 1164
5.1- Introduction. 1165
5.2- Approche proposée. 1166
5.3- Première application 1168
5.3.1- Optimisations par contraintes fixes 1168
5.3.2- Optimisations par contraintes dynamiques. 170
5.4- Deuxième application 176
5.4.1- Optimisations par contraintes fixes 176
5.4.2- Optimisations par contraintes dynamiques. 176
5.5- Conclusion. 179
CONCLUSION GENERALE ET PERSPECTIVE 181
LISTE DE PUBLICATIONS 183
BIBLIOGRAPHIE 185
ANNEXES 193
Annexe A 193
Annexe B. 194
Annexe C. 198
Annexe D 203
Annexe E. 204
INTRODUCTION GENERALE
Depuis une vingtaine d'années, les systèmes de
puissance doivent faire face à des défis très importants.
La libération du marché de l'électricité
crée des scénarios de fonctionnement beaucoup plus complexes que
par le passé. L'augmentation permanente de la dépendance
électrique de la société moderne implique un
fonctionnement des systèmes de puissance à 100% de leur
capacité et une sûreté maximale. En outre, la
qualité de la puissance électrique est devenue actuellement un
grand souci pour les consommateurs et les fournisseurs. Par conséquent,
des critères rigoureux de développement et de fonctionnement sont
de plus en plus exigés.
Dans ces conditions, la stabilité des systèmes
de puissance devient une des préoccupations majeures pour les
fournisseurs d'électricité. Ces systèmes doivent rester
stables pour toutes les petites variations au voisinage des points de
fonctionnement ainsi que pour des conditions sévères. Les
nouvelles méthodes et les nouvelles technologies permettant
d'améliorer la stabilité des systèmes font par
conséquent l'objet de travaux de recherche extrêmement
important.
Compte tenu de la variété des conditions de
fonctionnement et de la sévérité des incidents, les
équipements de commande installés actuellement sur les
réseaux peuvent s'avérer trop limités ou insuffisants pour
répondre efficacement aux diverses perturbations. En conséquence,
les opérateurs de réseaux cherchent à en optimiser leur
fonctionnement tout en maintenant un niveau de sécurité
satisfaisant.
Un système de puissance est un système hautement
non-linéaire qui fonctionne dans un environnement en évolution
continuelle : charges, puissance de génération, topologie du
réseau,... . Le système peut aussi être soumis à des
perturbations ; la perturbation peut être faible ou importante. De
petites perturbations, sous forme de variations de charge, se produisent
continuellement. Le système doit être capable de "répondre"
de façon satisfaisante aux besoins de la charge. Le système doit
également être capable de résister à de nombreuses
perturbations d'une nature sévère comme la foudre, la perte d'une
unité de génération, un court-circuit sur une ligne de
transmission, ... .
Suite à une perturbation transitoire, si le
système est stable, il atteindra un nouvel état
d'équilibre. Si le système est instable, cela se traduira, par
exemple, par une augmentation progressive de l'écart entre les angles de
rotor des générateurs ou par une diminution progressive des
tensions des noeuds du réseau. Un état instable du système
pourra conduire à des pannes en cascade et une déconnexion d'une
grande partie du réseau électrique.
Les oscillations des systèmes de puissance ont
été prédites dès la première installation
d'un système de puissance. Un système ayant plusieurs
générateurs interconnectés via un réseau de
transport se comporte comme un ensemble de masses interconnectées via un
réseau de ressorts et présente des modes d'oscillation multiples.
L'amortissement des oscillations a toujours été
considéré comme un élément important du bon
fonctionnement des systèmes de puissance. Une première solution
pour amortir ces oscillations était l'utilisation d'enroulements
amortisseurs dans les générateurs. Le problème des
oscillations a ainsi disparu, mais l'amortissement global du système est
resté toujours ignoré (Farmer, 2006).
Plusieurs points considérés comme évidents
à cette époque restent toujours valables :
- les oscillations à faible fréquence (entre 0.2
et 2 Hz) se produisent dans les systèmes de puissance à cause de
l'insuffisance des couples d'amortissement agissant sur les rotors des
générateurs.
- les oscillations apparaissent principalement dans le
système sous deux formes :
o les oscillations des modes locaux, associées
principalement à un générateur et ses
contrôleurs.
o les oscillations des modes interrégionaux,
associées à un groupe de générateurs et aux
propriétés du système (configuration de son réseau
de transport, écoulement de puissance, ...).
- les oscillations des rotors des générateurs
entraînent des fluctuations sur des variables électriques
(tensions, puissances actives et réactives, fréquence,...),
d'où l'origine de leur nom : oscillations
électromécaniques.
- le régulateur de tension AVR (Automatic Voltage
Regulator) du système d'excitation générateur, est
pratiquement la seule source responsable d'oscillations dans le
système.
- après avoir déterminé les sources
d'oscillations, il est évidemment souhaitable d'identifier, pour des
raisons économiques et de fiabilité, les points les plus
efficaces pour ajouter les dispositifs d'amortissement nécessaires.
Depuis les années soixante, les processus
d'interconnexion entre les systèmes de puissance ont fortement
augmentés et les réseaux de transport se sont étendus sur
de régions vastes. En outre, la libération du marché de
l'électricité a entraîné des augmentations du
chargement des réseaux de transport.
Cette évolution s'est accompagnée de la
réapparition du problème des oscillations. Les raisons de cette
réapparition peuvent se résumer comme suit (Dandeno et
al., 1968; Farmer, 2006) :
- l'utilisation de régulateurs de tensions
caractérisés par des réponses rapides et des gains
élevés (nécessaires pour améliorer la
stabilité transitoire) augmente la potentialité d'amortissement
négatif.
- les enroulements amortisseurs ne sont plus suffisamment
efficaces dans les systèmes interconnectés à cause de la
haute impédance extérieure vue de ces systèmes.
- l`augmentation du nombre des contrôleurs automatiques
mis en service dans les systèmes augmente la probabilité
d'interactions néfastes entre les contrôleurs.
- les petites oscillations produites dans chaque
générateur, éventuellement non- significatives à
titre individuel, peuvent accroître l'impact négatif des
oscillations des lignes d'interconnexion étendant sur le
système.
- les oscillations électromécaniques
entraînent des contraintes mécaniques importantes, voire
dangereuses, sur les masses tournantes des générateurs.
Dans ces nouvelles conditions, les oscillations
représentent un problème important des grands systèmes de
puissance. Le problème de ces oscillations est ainsi redéfini par
leur rôle important dans la stabilité de l'angle de rotor aux
petites perturbations (appelée stabilité dynamique) pouvant
conduire à la perte de synchronisme et à une restriction de la
puissance transmissible dans le système. Ainsi, l'amélioration de
la stabilité aux petites perturbations, en particulier l'amortissement
des oscillations interrégionales, devient de plus en plus très
importante (Samouhi, 1983; Sadeghzadeh, 1998; Snyder, 1999; Roosta, 2003).
Pour surmonter le problème des oscillations
électromécanique et améliorer l'amortissement du
système, des signaux supplémentaires stabilisateurs sont
introduits dans le système d'excitation via son régulateur de
tension. Ces signaux stabilisateurs vont produire des couples en phase avec la
variation de vitesse de générateur pour compenser le retard de
phase introduit par le système d'excitation. Les stabilisateurs de
puissance (Power System Stabilizers, PSSs), grâce à leurs
avantages en terme de coût économique et d'efficacité, sont
les moyens habituels, non seulement pour éliminer les effets
négatifs des régulateurs de tension, mais aussi pour amortir les
oscillations électromécaniques et assurer la stabilité
globale du système (DeMello et al., 1978; Larsen et
al., 1981, I).
Conventionnellement, pour régler les paramètres
du PSS, les équations du modèle non- linéaire du
système sont linéarisées autour du point de fonctionnement
et les techniques de contrôle linéaire sont ensuite
appliquées. Les paramètres du PSS sont alors fixés
à certaines valeurs correspondant à des conditions de
fonctionnement données. Il est important de se rappeler que les
paramètres du générateur varient avec la charge : le
comportement dynamique de la machine variant suivant les points de
fonctionnement. Les PSSs doivent donc être réglés et
coordonnés de sorte que la stabilité globale du système
soit garantie pour une grande variété de points de
fonctionnement.
En outre du problème de réglage des PSSs, le
choix de leur emplacement représente un facteur critique pour obtenir
une performance optimale de stabilisation. Un PSS peut être "bien"
réglé pour améliorer l'amortissement d'un mode, mais il
peut produire des effets nuisibles pour d'autres modes. En outre, des
emplacements différents entraînent des oscillations
différentes selon les points de fonctionnement.
Dans de nombreuses recherches, l'emplacement des PSSs est
choisi avant d'aborder l'analyse des méthodes possibles de
réglage. La méthode des facteurs de participation (FP)
était intensivement utilisée pour identifier les endroits de
placement possibles des PSSs (Abdel-Magid et al., 1999; Do Bomfim
et al., 2000; Abdel-Magid et al., 2003).
En général, un nombre trop important ou un
mauvais positionnement des PSSs peut entraîner un dysfonctionnement du
système. Il est donc essentiel de "bien localiser" et de choisir un
nombre adéquat de PSSs pour réduire ces effets
indésirables.
Dans la littérature, différentes approches
utilisant l'algorithme génétique (AG) ont été
proposées pour le réglage robuste des PSSs dans les
réseaux multimachines (Abdel-Magid et al., 2003; Hongesombut
et al., 2004; Rashidi et al., 2004; Hongesombut et
al., 2005; Panda et al., 2007). L'avantage des AG par rapport aux
autres techniques d'optimisation est leur indépendance par rapport
à la complexité des problèmes. De plus, il travaille sur
un ensemble de points (une population) et non sur un seul point. L'AG est donc
une méthode d'optimisation globale.
Le PSS est toujours considéré comme un moyen
efficace pour l'amortissement des modes électromécaniques locaux,
mais en même temps son rôle dans l'amortissement des modes
interrégionaux reste toujours considéré comme faible.
L'objectif de notre travail est ainsi d'assurer un amortissement maximum des
modes interrégionaux aussi bien que des modes locaux. Pour atteindre cet
objectif, nous proposons un réglage optimal des PSSs avec la meilleure
localisation possible et le nombre le plus faible de PSSs. Ceci permet
d'assurer un amortissement satisfaisant des oscillations rotoriques et de
garantir la stabilité globale du système pour différents
points de fonctionnement. Nous avons donc développé un
programme
d'AG avec une fonction multiobjectif, basée sur
l'analyse des valeurs propres du système (partie réelle de la
valeur propre et facteur d'amortissement).
Pour vérifier les performances de la méthode
proposée, nous avons analysé un réseau multimachines
comportant 16 générateurs et 68 noeuds (New England/ New York),
(Rogers, 2000).
Pour évaluer les résultats obtenus, nous
appliquons une méthode d'analyse dans le domaine complexe, à
savoir la méthode des valeurs propres, pour déterminer les
différents modes du système. Cette analyse donne des informations
importantes sur la stabilité du système en indiquant la
présence des modes mal ou non-amortis. En outre, l'origine de ces modes
peut également être déterminée. L'analyse de la
stabilité a été complétée par simulation du
modèle non-linéaire originel dans le domaine temporel.
Le premier chapitre de notre thèse concerne la
modélisation générale d'un système de puissance
adapté à l'étude de la stabilité angulaire aux
petites perturbations. Il présente également l'analyse par
valeurs propres et l'analyse modale basées sur la linéarisation
du modèle.
Dans le deuxième chapitre, nous avons fait un rappel de
la stabilité au sens de Lyapunov. Nous avons également
rappelé les caractéristiques des différents types de
stabilité d'un système de puissance. Ensuite, nous avons
étudié en détail la stabilité angulaire aux petites
perturbations avec les stabilisateurs de puissance (PSSs).
Le troisième chapitre concerne une présentation
théorique des algorithmes génétiques, qui est la
méthode d'optimisation utilisée dans ce travail.
Le quatrième chapitre présente le réseau
test étudié (réseau multimachines interconnecté de
New England/New York). L'approche proposée est également
présentée. Son objectif est d'améliorer l'amortissement
des oscillations électromécaniques (associées aux modes
globaux et locaux). Pour ce faire, nous proposons une optimisation globale des
paramètres, de la localisation et du nombre des PSSs nécessaires
pour assurer une performance robuste. Nous avons aussi analysé la
réaction du système (en modèle linéaire et
non-linéaire) lors de l'application de plusieurs scénarios
sévères (analyse et discussion des résultats).
Enfin, le cinquième chapitre se propose
d'améliorer la performance de l'optimisation et
l'accélération de la convergence d'un AG. Lors de l'optimisation
du problème, cette approche permet d'adapter au processus d'optimisation
l'espace de recherche en lui assurant des contraintes dynamiques
adaptatives.
Chapitre I
Modélisation du
système
de puissance
1.1- Introduction.
Un grand réseau électrique (appelé aussi
système de puissance) se compose d'éléments
(générateurs, transformateurs, lignes,...), plus ou moins
nombreux selon la taille du réseau, interconnectés, formant un
système complexe capable de générer, de transmettre et de
distribuer l'énergie électrique à travers de vastes
étendues géographiques, figure (1). Un modèle
mathématique typique non-réduit d'un "grand" système peut
contenir jusqu'à 15000, voire plus, variables d'état (Farmer,
2006). Ainsi, les systèmes de puissance modernes sont
caractérisés par taille et complexité croissantes. Plus la
dimension d'un système de puissance augmente, plus les processus
dynamiques et l'analyse des phénomènes physiques sous-jacents
sont complexes. Outre leur taille et leur complexité, les
systèmes de puissance présentent un comportement
non-linéaire et variant dans le temps. Les non-linéarités
peuvent être introduites par des éléments à
fonctionnement discontinu tels relais, thyristors, ..., par des
éléments avec hystéré sis ou saturation,... . De
nos jours, cette complexité structurelle impacte de plus en plus
l'évolution des problèmes de stabilité et des
phénomènes dynamiques dans les systèmes de puissance
interconnectés.
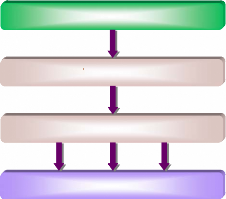
Distri bution
Production
Transport
Charges
Figure 1. Les différents niveaux
d'un système de puissance.
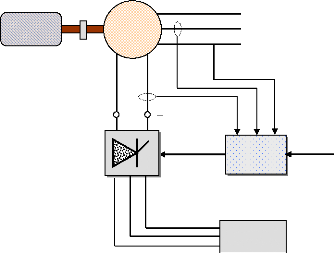
Les grandes composantes d'un système de puissance
peuvent être représentées par un schéma blocs comme
le montre la figure (2), (Sauer et al., 1998). Cette
représentation ne montre pas toutes les interactions dynamiques entre
les éléments et leurs contrôles, mais elle peut servir
à une description générale pour les structures
dynamiques.
L'étude de la performance dynamique d'un système
de puissance est très importante pour les opérateurs du
système (point de vue économique) et la société en
général (point de vue de fiabilité). Une étape
essentielle dans ce type d'étude est de comprendre physiquement et
mathématiquement les phénomènes dynamiques
d'intérêt. Ensuite, la modélisation et la simulation
effectuées du système peuvent refléter son comportement
critique.
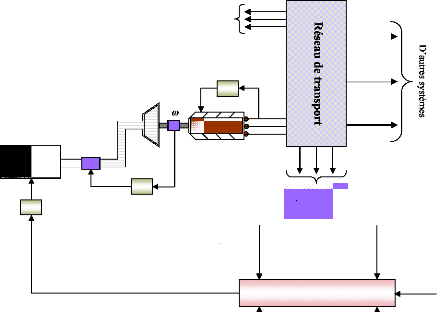
Source
d'énergie
Contrôle de
la source
d'énergie
Signaux de contrôle de la
puissance de
génération désirée
Système de la
force motrice
Régulateur
de fréquence
D'autres
générateurs
Générateur
Régulateur
de tension
Puissance de
génération
Système de contrôle central
V
Charges
Puissance
transmise
Fréquence du
système
Fréquence de
référence
du
système
|
Programmation de puissance de transmission
|
Figure 2. Structure générale
d'un système de puissance. 1.2- Les
phénomènes dynamiques.
Dans un système de puissance une grande
variété de phénomènes dynamiques différents
est susceptible de se produire. Ces phénomènes dynamiques ont des
caractéristiques et des origines physiques diverses et se produisent
dans des gammes de temps différentes.
Un phénomène dynamique est
généralement initié par une perturbation, une action d'un
contrôleur, une manoeuvre de protection,... .
Selon le niveau de la perturbation d'origine, nous pouvons
distinguer deux classes de phénomènes dynamiques :
- les "petites" perturbations. Il s'agit de fluctuations
normales, de faible amplitude, des grandeurs électriques ou
mécaniques ; (par exemple, variation continue de charge). Ces
phénomènes se manifestent habituellement dans le système
par de faibles oscillations transitoires souvent peu amorties.
- les "grandes" perturbations. Ce type de perturbation
correspond, par exemple, à un court-circuit sur une ligne de
transmission, à la perte d'un générateur,... . Elles
exciteront par contre des oscillations importantes.
Afin de mieux comprendre les mécanismes
d'instabilité des systèmes de puissance, les divers
phénomènes dynamiques doivent être définis et
classés. Si l'on tient compte de leurs
caractères physiques ainsi que de leurs plages de
réponse temporelles, les phénomènes dynamiques sont
habituellement divisés en quatre groupes (Machowski et al.,
1998).
1.2.1- Les phénomènes de
propagation.
Ils se produisent dans les lignes de transmission haute
tension de grande longueur et correspondent à la propagation des ondes
électromagnétiques provoquées par des coups de foudre ou
des opérations de coupure/fermetures. La gamme de temps de la dynamique
de ces phénomènes va de la microseconde à la milliseconde.
Ils possèdent les dynamiques les plus rapides.
1.2.2- Les phénomènes
électromagnétiques.
Ils ont lieu principalement dans les enroulements des
générateurs et des moteurs (enroulements armatures et
amortisseurs) et dans les dispositifs électroniques de puissance. Ils
découlent d'une perturbation (tel un court-circuit), d'une
opération d'un système de protection, d'une commutation
(thyristors, ...), ou d'une interaction entre les machines électriques
et le réseau.
Ces phénomènes génèrent des
courants et des couples élevés à l'intérieur des
générateurs, sur une échelle de temps typique de plusieurs
millisecondes. Au-delà de ce laps de temps, les inerties de la turbine
et du générateur sont suffisantes pour empêcher toute
variation importante de vitesse de rotor.
1.2.3- Les phénomènes
électromécaniques.
Les phénomènes électromécaniques
impliquent principalement les champs de rotors, les enroulements amortisseurs
et les inerties des rotors. Ils sont principalement dus aux mouvements des
masses tournantes des générateurs et des moteurs. Ils se
produisent à la suite d'une perturbation, d'une opération de
commande sur le système de contrôle de tension ou sur le
contrôle de la turbine. La gamme de temps de ces phénomènes
s'étend environ d'une seconde à plusieurs secondes. Cette
échelle de temps est considérée suffisamment grande pour
que les phénomènes soient influencés par la turbine et les
systèmes de commande de générateur. Dans cette gamme de
temps, les variations de vitesse de rotor couplées aux variations
électromagnétiques produisent alors des effets
électromécaniques.
1.2.4- Les phénomènes
thermodynamiques.
Les phénomènes thermodynamiques se
développent dans les chaudières des centrales thermiques lors de
la demande de commande automatique de génération, mise en
application suite à une perturbation d'équilibre entre la
production et la consommation de puissance. Ils s'étendent de quelques
dizaines de secondes à quelques dizaines de minutes : ils
présentent ainsi les dynamiques les plus lentes.
La figure (3) montre la classification des
phénomènes dynamiques expliquée ci-dessus.
Une "bonne" compréhension physique et
mathématique du système et des phénomènes
associés permet de mieux comprendre la modélisation et la
simulation du système à refléter les comportements
critiques de ce dernier. Le paragraphe suivant définit le modèle
mathématique utilisé et ses éléments.
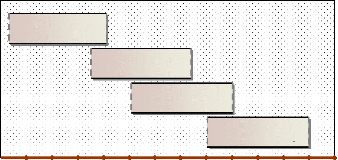
Dynamiques de
propagation
Dynamiques
électromagnétiques
électromécaniques
Dynamiques
Dynamiques
thermodynamique
s
microsecondes millisecondes secondes minutes
Figure 3. Caractéristiques des
phénomènes dynamiques rencontrés
dans les
systèmes de puissance.
1.3- Le modèle général
non-linéaire.
1.3.1- Introduction.
La première étape, lorsqu'on veut analyser et
commander un système électrique de puissance, consiste à
trouver un "bon" modèle mathématique. Généralement,
un modèle, dans l'analyse des systèmes, est un ensemble
d'équations ou de relations, qui décrit convenablement les
interactions entre les différentes variables étudiées,
dans la gamme de temps considérée et avec la précision
désirée, pour un élément ou un système. Par
conséquent selon le but de l'analyse, un élément ou un
même système physique, peut donner lieu à des
modèles différents.
Dans de nombreux cas, le choix du modèle correct est
souvent la partie la plus difficile de l'étude. Le point essentiel est
de trouver le "bon modèle" qui réalise un compromis entre la
fidélité du comportement qualitatif et quantitatif et la
simplicité de mise en oeuvre à des fins d'analyse et de
synthèse. Les modèles complexes ont généralement
besoin d'un nombre plus important de paramètres. En outre, l'obtention
de valeurs fiables pour ces paramètres exige un travail important. Enfin
si des méthodes trop complexes sont utilisées, l'analyse et les
calculs sont inutilement "volumineux" et l'interprétation du
résultat exige également un travail très important
(Andersson, 2006).
Généralement, pour établir un
modèle de réseau électrique pour les études
dynamiques, on tient compte uniquement des équipements en
activité pendant la plage temporelle du phénomène
dynamique considéré. Le résultat est donc le modèle
de connaissance complet du système : il se compose d'équations
différentielles ordinaires non-linéaires et d'équations
algébriques (Kundur, 1994).
Les modèles présentés dans ce chapitre
concernent les éléments suivants :
- les unités de production : générateurs
électriques, systèmes d'excitation, turbines et systèmes
de contrôle associés.
- les transformateurs et les lignes de transmission du
réseau de transport.
- les charges enfin pour la partie consommation.
1.3.2- Les éléments du
modèle.
1.3.2.1- Modèle du
générateur.
L'énergie électrique est
généralement produite par les machines synchrones. Ces
dernières sont caractérisées par une vitesse de rotation
de l'arbre de sortie de chaque machine égale à la vitesse de
rotation du champ tournant. Pour obtenir un tel fonctionnement, un couple
mécanique issu d'une énergie primaire source, comme
l'énergie hydraulique, l'énergie nucléaire ou
l'énergie chimique, est appliqué à l'axe de la machine
synchrone via un lien mécanique intermédiaire, à savoir la
turbine. Le champ magnétique rotorique est généré
habituellement par un circuit d'excitation alimenté par courant continu.
La position du champ magnétique rotorique est alors fixe par rapport au
rotor : ceci impose en fonctionnement normal une vitesse de rotation identique
entre le rotor et le champ tournant statorique. Ainsi, les enroulements du
stator sont soumis à des champs magnétiques qui varient
périodiquement. Une f. é.m. de courant alternatif est
donc induite dans le stator.
Les générateurs synchrones participent de
façon extrêmement importante aux phénomènes
dynamiques et à la qualité globale de l'alimentation en
énergie. Il est donc nécessaire de développer des
modèles pratiques et réalistes des machines synchrones. Dans ce
chapitre, nous présenterons et discuterons un modèle
adapté à l'analyse de la stabilité dynamique.
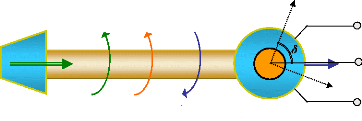
1.3.2.1.1- Modèle de la machine synchrone dans
le repère de Park.
Dans la machine idéale, le stator est muni de trois
enroulements repérés a, b et c,
décalés de 120 degrés. Le rotor comporte un certain nombre
d'enroulements, répartis sur deux axes: l'axe-d, (axe
direct) qui coïncide avec celui de l'enroulement d'excitation et
l'axe-q (axe quadratique) situé en quadrature avance
par rapport à l'axe direct (Custem, 2002, II).
Pour supprimer la non-linéarité entre les
grandeurs du stator et celles du rotor, les enroulements de la machine doivent
être ordonnés selon deux axes perpendiculaires, chaque machine est
modélisée dans sa référence locale (d-q)
tournant avec son rotor (Andersson, 2006). Pour formaliser le couplage entre
les équations du système et établir les équations
décrivant le comportement du système global, toutes les tensions
et tous les courants doivent être représentés dans une
seule référence commune à toutes les machines.
Généralement, une référence tournant à la
vitesse synchrone sert de référence commune. Une telle approche
peut être réalisée par la transformation de Park. Le
développement de cette transformation est donnée à
l'annexe A.
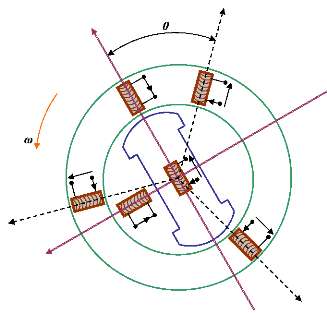
La figure (4) montre schématiquement les enroulements
et les sens des courants dans une machine synchrone. La figure (5) donne le
modèle équivalent dans le repère de Park (d-q).
Les différents enroulements dans les deux représentations sont
les suivants :
- Les trois enroulements statoriques notés a,
b et c, et leurs enroulements équivalents notés
d5 et q5.
- L'axe direct comporte l'enroulement d'excitation noté
f, et un enroulement amortisseur noté
da.
- L'axe en quadrature comporte un enroulement amortisseur
noté qa.
Notons enfin que l'enroulement d'excitation est soumis à
une tension Vf tandis que les circuits da, qa sont
court-circuités en permanence.
d
iD a
D
ia va
vb
ib
Q
f
vf
if
c
b
vc
iQ
ic
q
c
b
a
Figure 4. Modélisation de la machine
synchrone idéalisée.
q
if
qh iqh vqh
qa iqa
f
vf
da
ida
idh
vdh
dh
d
Figure 5. Modèle de la machine
synchrone dans le repère de Park.
1.3.2.1.2- Les hypothèses du
modèle.
Le modèle du générateur et de ses
contrôles se limite habituellement aux équations
différentielles ordinaires couplées entre elles via les
équations algébriques du réseau de transport. Chaque
équation différentielle exprime la dérivée d'une
variable d'état (tels l'angle de rotor, la tension d'excitation, ...) en
fonction d'autres variables d'état et variables algébriques. Le
nombre d'équations différentielles décrivant le
modèle du générateur définit l'ordre du
modèle. Il existe plusieurs modèles, allant du plus simple, le
modèle classique représentant seulement les
caractéristiques électromécaniques du
générateur, au plus complexe, à savoir le modèle du
huitième ordre tenant compte de tous les circuits de rotor, de stator,
d'amortissement et de champ de saturation (Anderson et al., 2003).
Dans les études des oscillations électromécaniques, le
modèle du générateur doit représenter deux
caractéristiques fondamentales : les caractéristiques
électriques des enroulements d'excitation et les caractéristiques
mécaniques de l'arbre du générateur.
Les hypothèses considérées pour
établir ce modèle sont basées en négligeant
l'influence : - des résistances rotoriques et statoriques.
- des enroulements amortisseurs.
- du champ de saturation.
- des phénomènes transitoires dans le stator.
- de la variation de vitesse dans les équations de
tensions du stator (ainsi, ùr =
ùo = 1 [p.u]), (cette supposition est faite pour
compenser l'effet de l'annulation des phénomènes transitoires
dans le stator).
Ce modèle néglige également
l'amortissement produit par les courants de Foucault dans le corps du rotor (on
suppose que la f. é.m. transitoire suivante l'axe d,
à savoir E'd, est constante). Ainsi, comme il n'y a aucun
enroulement sur l'axe en quadrature pour représenter le corps du rotor,
nous aurons:
Ed ' = , X q = X q
0 '
E'd : f.é.m. du générateur
induite suivante l'axe d, en p.u. X'q :
réactance synchrone d'axe q, en p.u.
Xq : réactance transitoire d'axe
q, en p.u.
Enfin, nous supposerons que l'angle de rotor ä
(position angulaire du rotor par rapport à la référence
tournante au synchronisme) coïncide avec l'angle de la tension interne du
générateur.
Le modèle résultant est le modèle du
troisième ordre. Il est décrit par les variables d'état
suivants (Anderson et al., 2003) :
E'q : f.é.m. du
générateur induite suivante l'axe q, en p.u.
ù : vitesse angulaire du rotor, en p.u.
ä : angle de rotor, en rad.
Ce modèle, bien adapté à l'étude
de la stabilité dynamique, est le plus simple. Il est largement
utilisé dans l'analyse des valeurs propres et le réglage des
paramètres des stabilisateurs de puissance (Sauer et al.,
1998).
1.3.2.1.3- Equations
électriques.
Considérons une ième machine
d'un réseau multimachines, nous allons déterminer dans de ce
paragraphe les équations algébriques du stator de cette machine :
à savoir les équations concernant les tensions suivant les axes
d et q et les puissances électriques.
Les grandeurs électriques de cette machine sont
représentées sur la figure (6). Avant de débuter le
calcul, nous pouvons faire les remarques suivantes :
- le repère (di, qi) concerne la
ième machine seule, alors que le repère
(D, Q) est commun à toutes les machines du
système.
- l'angle de couple äi, vu entre D et
qi, représente la position du repère (d,q) de
la ième machine par rapport au repère commun
(D,Q) : il varie constamment dans le temps et peut être positif
ou négatif (Yu, 1983).
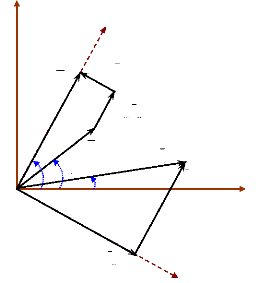
Q
qi
Eqi jXqiIqi
'
jXdi Idi
Ii
Iqi
Idi
di
äi
Vi
ái
èi
D
Figure 6. Phaseurs relatifs à la
ième machine d'un système multimachines.
D'après la figure (6), la tension terminale
Vi de la ième machine du
système peut se déterminer par l'équation suivante :
Vi = E ' qi - jX '
di Idi - jXqiIqi (1)
Notons, dans le repère commun (D-Q), les
expressions suivantes :
E ' qi= E ' qi e
ä
j i
|
Iqi I qi e ä
= , ( - 90 ° )
j i I di I di e
ä
= j i
|
(2)
|
Vi i Ve j á i
=
En introduisant les relations (2) dans la relation (1), nous
obtenons :
j á ä ä ä
i i i i
' ( 90 )
j j + °
V e E e X I e jX I e
= - -
j (3)
i qi di di qi qi
Qui devient après arrangement :
V e i i = E - X I - jX I
- ( ä - á ) '
j (4)
i qi di di qi qi
V jV E X I jX I (5)
i i i i i i qi di di qi qi
- - - = - -
'
cos( ä á ) sin( ä á
)
En séparant partie réelle et partie imaginaire,
nous obtenons les expressions de Vd et Vq
suivantes :
ç ??
V X I
di qi qi
=
Vqi
' ' (6)
E X I
qi di di
-
En considérant les relations (2) et la relation suivante :
Ii = Idi + Iqi,
l'équation (1) peut être donc réécrite comme suit
:
|
V E e jX I jX e jX I e
' ä - ' + ' ä - ä
j i i i
j j
i qi
= di i di qi qi
|
(7)
|
Pour n machines d'un système multimachines,
l'équation (7) peut s'écrire sous la forme matricielle suivante
:
[ ] [ ][ ] [ ] [ ] [ ][ ][ ]
V E e j X I j X X I e
= - + -
' ' '
j ä j ä (8)
q d d q q
Dans cette dernière équation, les termes
[V] , [ ' ]
Eq , [I] et [Iq
] sont des vecteurs colonnes
de dimension n et les coefficients [
jä ]
e, [ ' ]
X d et [ ' ]
X d - X q sont des matrices
diagonales.
Les puissances électriques (apparente, active et
réactive) de la ième machine sont
données par :

)
S P jQ V I V j V I jI
*
i ei ei i i di qi di qi
= + = = + -
( ) (
(V di
- V di Iqi )
I V I j V I
di qi qi qi di
+ +
) (
? ??
??
Pei
Qei
V di
I V I
di qi qi
+
V qi I di - V di I qi (9)
Etant donné que les phénomènes transitoires
dans le stator sont négligés, le couple électrique est
dons égal à la puissance électrique active en per-unit.
Ainsi Tei = Pei.
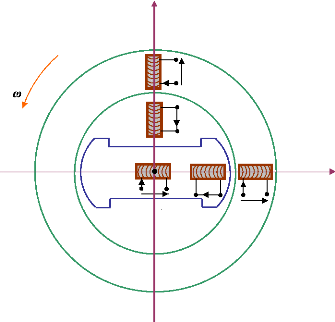
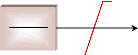
1.3.2.1.4- Equations
mécaniques.
Les propriétés mécaniques des machines
synchrones se modélisent généralement à l'aide de
l'équation du mouvement basée sur le théorème du
moment cinétique (Andersson, 2006). Cette équation
présente une importance fondamentale dans l'étude des
oscillations électromécaniques, car ces oscillations
représentent un phénomène important dans la plupart des
systèmes de puissance, en particulier ceux qui contiennent de lignes de
transmission longues (Andersson, 2006). Dans le fonctionnement à
l'état d'équilibre, toutes les machines synchrones du
système tournent à la même vitesse angulaire
électrique. Le couple mécanique
Tm est de même sens que le sens de
la rotation de l'axe du générateur. Le couple électrique
Te est de sens opposé à la rotation et ce
couple équilibre le couple mécanique (Basler et al.,
2005), figure (7). Lors d'une perturbation, un ou plusieurs
générateurs peuvent être accélérés ou
ralentis et il y a donc risque de perdre le synchronisme. Ceci peut avoir
impact important sur la stabilité du système et les
générateurs perdant le synchronisme doivent être
débranchés, sinon ils pourraient être
sévèrement endommagés.
Turbine
Rotor
Te
Tm ù
Pm
q
Pe d
Générateur
Figure 7. Couples mécanique et
électrique agissant sur l'axe d'un générateur.
Pour un système multimachines, s'il y a un
déséquilibre des couples agissants sur le rotor de la
ième machine, cette dernière va
accélérer ou ralentir selon l'équation du mouvement
suivante :
Äù& =
i T T
2 H i
1
( )
mi ei
- (10)
Avec Hi constante d'inertie (en secondes)
représentant l'inertie totale de toutes les masses tournantes
connectées à l'arbre du générateur.
Pour des oscillations à faibles fréquences, le
courant induit dans les enroulements amortisseurs est négligeable. Par
conséquent les enroulements amortisseurs peuvent être
complètement négligés dans la modélisation du
système. Si les enroulements amortisseurs sont ignorés, le couple
d'amortissement produit par ces enroulements amortisseurs est donc
également négligeable. Pour tenir compte de la composante du
couple négligée, on introduit dans l'équation du mouvement
un terme de compensation D (nommé aussi coefficient
d'amortissement) en p.u, (Sauer et al., 1998). Ce coefficient
représente l'amortissement naturel du système : il empêche
l'accroissement des oscillations, à moins qu'une source d'amortissement
négatif soit introduite (tel le régulateur de tension du
système d'excitation). L'équation du mouvement peut être
donc réécrite comme suit :
|
ù& H ù
i T T D
1 ? ? Ä
Ä = ( (
mi ei i i
2 i
|
-1)) (11)
|
L'équation de l'angle de rotor de la
ième machine est donné par :
ä& i = ù o
(Äù i -1) (12)
Avec :
Äùi : déviation de la vitesse
angulaire du rotor de la ième machine, en p.u.
ùo : vitesse de synchronisme (vitesse de base), en
rad/s.
(ùo = 2ðf , f :
fréquence nominale, en Hz).
Tmi : couple mécanique fourni par la turbine, en
p.u.
Tei : couple électromagnétique
associée à la puissance électrique Pei
produite du
|
générateur, (
|
T ei
|
P
= ), en p.u.
ei
ù i
|
Di : coefficient d'amortissement du
générateur, en p.u. ä : angle de rotor, en rad.
1.3.2.1.5- Régulation du
générateur.
Les machines synchrones du système doivent être
capable de maintenir l'équilibre des puissances actives et des
puissances réactives dans des conditions de fonctionnement diverses.
Ainsi, des tensions sinusoïdales équilibrées sont garanties
avec des amplitudes et des fréquences constantes.
Si l'équilibre des puissances actives n'est plus
assuré, la fréquence de synchronisme dans le système sera
changée, alors qu'un déséquilibre des puissances
réactives entraînera une variation des tensions du système
par rapport à leurs valeurs de référence (Andersson,
2006).
Pour assurer une génération satisfaisante
d'énergie électrique, pour un grand nombre de points de
fonctionnement, le couple mécanique Tm
appliqué au rotor et la tension d'excitation Efd doivent
être réglés systématiquement pour s'accommoder de
toute variation du système.
Le système responsable de la génération
du couple mécanique et ainsi de l'entraînement du rotor du
générateur est appelé "système de force motrice".
Le contrôle de la fréquence (ou contrôle de la puissance
active) associé à ce système maintient la vitesse nominale
des générateurs en assurant de ce fait une fréquence
constante. Par ailleurs, le système d'excitation est responsable de la
tension d'excitation fournie au générateur. Le régulateur
de tension (ou régulateur de la puissance réactive)
associé modifie les valeurs du système d'excitation pour enfin
obtenir les tensions désirées aux bornes du
générateur (Anderson et al., 2003).
Nous présentons par la suite successivement les principes
généraux :
- de la génération de la puissance mécanique
avec la régulation de fréquence
- du système d'excitation avec la régulation de
tension et leurs modèles mathématiques.
1.3.2.1.5.1- Régulateur de fréquence et
modèle de la turbine.
Un système de force motrice, figure (8), se compose de
la source d'énergie primaire, de la turbine (équipé d'un
servomoteur) et du régulateur de fréquence (gouverneur) (Farmer,
2006).
La turbine transforme l'énergie potentielle de la
source en énergie de rotation de l'arbre (rotor) sur lequel est
placé l'alternateur. L'alternateur convertit la puissance
mécanique fournie par la turbine en puissance électrique de
sortie. La vitesse de l'arbre de la turbine est mesurée
précisément et comparée à la vitesse de
référence. Le régulateur de fréquence (vitesse)
agit ensuite sur le servomoteur pour ouvrir et fermer les vannes de
contrôle et modifier par conséquent la vitesse du
générateur. Ainsi, le rôle de la turbine est
d'entraîner le rotor du générateur à la vitesse
synchrone correspondant à la fréquence du système de
puissance.
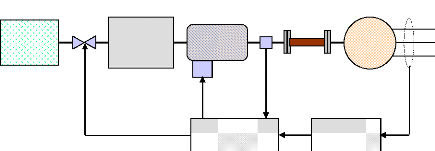
Source de
l'énergie
primaire
Valve de
contrôle
Conversion
de l'énergie
Turbine
Régulateur de
fréquence
Servo -
moteur
Capteur de
vitesse
Arbre de
transmission
Référence de
puissance
Générateur
Réseau de
transport, 3Ö
Figure 8. Structure générale
d'un système de force motrice - générateur.
Les turbines à vapeur utilisées dans les
centrales thermiques (charbon, gaz, pétrole, nucléaire) sont
constituées d'un certain nombre de roues, successivement fixes et
mobiles, portant des ailettes le long desquelles la vapeur se déplace.
Au fur et à mesure que la vapeur progresse axialement dans la turbine,
sa pression diminue et la taille des ailettes augmente. Ces différentes
roues sont généralement groupées en plusieurs
étages, particulièrement dans les centrales de grande puissance.
La division de la turbine en étages permet de resurchauffer la vapeur
entre les étages en assurant, par conséquent, un meilleur
rendement au cycle thermique (Custem, 2002, I).
Le gouverneur forme une boucle de retour qui surveille la
vitesse du rotor à chaque instant. Considérons par exemple une
perturbation de l'équilibre des puissances actives. Dans les toutes
premières secondes, l'énergie correspondante va être
prélevée sur l'énergie cinétique des masses
tournantes des unités de production. Ceci va entraîner une
perturbation de la vitesse de rotation de ces unités. Cet écart
de vitesse doit être détecté et corrigé
automatiquement par les gouverneurs. Ces gouverneurs doivent changer
l'admission de fluide (vapeur, gaz ou eau) dans les turbines de manière
à ramener les vitesses et donc la fréquence du réseau,
autour de leurs valeurs nominales.
Dans tout système de puissance, il très
important de maintenir la fréquence dans une plage étroite autour
de sa valeur nominale (50 ou 60 Hz). Le respect strict de cette valeur est non
seulement nécessaire au fonctionnement correct des charges mais il est
également l'indicateur d'équilibre entre puissances actives
produites et consommées (Custem, 2002, I).
Dans l'analyse de la stabilité transitoire ou
dynamique, la réponse temporelle du système de la force motrice
à une perturbation est considérée comme plus lente que la
plage d'étude de la stabilité concernée (typiquement entre
10 et 20 secondes). Ainsi, le modèle du système de la force
motrice peut être extrêmement simplifié. Pour une analyse de
stabilité transitoire d'une durée de quelques secondes, le
modèle du système de la force motrice peut être
supprimé en considérant que le couple mécanique de la
turbine reste constant (Farmer, 2006). Sa faible influence sur le comportement
des oscillations électromécaniques associées à la
stabilité aux petites perturbations peut aussi être
négligée. Ainsi, il n'est pas utilisé lors de
l'établissement du modèle linéaire du système de
puissance associé à ce type de stabilité.
Dans quelques cas, le modèle peut être
employé pour calculer les fréquences naturelles de torsion du
système de rotor. Il peut être également employé
dans la simulation dynamique du
système de puissance pour obtenir des informations sur les
couples de rotor se produisant lors d'un défaut (Machowski et
al., 1998).
Le modèle de l'ensemble turbine à vapeur/gouverneur
utilisé en simulation dynamique du modèle non-linéaire est
représenté par la figure (9), (Milano, 2005).
T max

Tm
1
ùréf
1 +
KR
sT 4
1 3
+sT
+
1+
+
sT5
1+s TC
1+ sTS
ù
Tmin
Régulateur
Servomoteur
Réchauffeur
Figure 9. Modèle de la turbine et du
gouverneur. 1.3.2.1.5.2- Régulateur de tension et modèle
du système d'excitation.
Le système d'excitation est un système
auxiliaire qui alimente les enroulements d'excitation de la machine synchrone
afin que cette dernière puisse fournir le niveau de puissance
demandé. En régime permanent, ce système fournit une
tension et un courant continu mais il doit être capable également
de faire varier rapidement la tension d'excitation en cas de perturbation sur
le réseau (Custem, 2002, I).
Actuellement, des systèmes d'excitation variés sont
employés. Trois principaux types peuvent être identifiés
(IEEE, 2005) :
a)- Les systèmes d'excitation à courant
continu -CC- :
Ils utilisent une génératrice à courant
continu avec collecteur comme source de puissance du système
d'excitation.
b)- Les systèmes d'excitation à courant
alternatif -CA- :
Ils utilisent un alternateur et des redresseurs statiques ou
tournants pour produire le courant continu nécessaire dans l'enroulement
d'excitation de la machine synchrone.
c)- Les systèmes d'excitation statiques
(systèmes ST) :
Dans ce cas, le courant d'excitation est fourni par un
redresseur commandé. Sa puissance est fournie soit directement par le
générateur à travers un transformateur donnant le niveau
approprié de tension, soit par des enroulements auxiliaires
montés dans le générateur.
Les systèmes d'excitation sont équipés de
contrôleurs, appelés habituellement régulateurs de tension
(Automatic Voltage Regulator : AVR), figure (10). Ces derniers sont très
importants pour l'équilibre de la puissance réactive qui sera
fournie ou absorbée selon les besoins des charges. En outre ces
contrôleurs représentent un moyen très important pour
assurer la stabilité transitoire du système de puissance. Le
régulateur de tension agit sur le courant d'excitation de l'alternateur
pour régler le flux magnétique dans la machine et "ramener" la
tension de sortie de la machine aux valeurs souhaitées. Une
caractéristique très importante d'un régulateur de tension
est sa capacité à faire varier rapidement la tension
d'excitation.
Vt
It
If
+
Système
d'excitation
statique
Vf
Vref
AVR
Turbin
Générateur
Source
auxiliaire
Figure 10. Structure générale
d'un système d'excitation statique avec son AVR.
Le groupe IEEE task forces présente
périodiquement des recommandations pour la modélisation des
éléments d'un système de puissance dont les
systèmes d'excitation. Plusieurs modèles sont
suggérés pour chaque type de système d'excitation (IEEE,
2005). Les systèmes d'excitation statiques étant les plus
installés actuellement, nous avons donc choisi dans notre étude
d'utiliser le modèle du système IEEE-ST1A, modèle le plus
utilisé dans la littérature. Ce type de système
d'excitation se caractérise par sa rapidité et sa
sensibilité (IEEE, 2003) :
- sa constante de temps Ta est faible,
normalement de l'ordre de quelques millisecondes - son gain
Ka est élevé, généralement
entre 200 et 400 per-unit.
La figure suivante montre le modèle du système
d'excitation et de son régulateur de tension utilisé dans notre
étude.
Vt
Efd _ max
Vréf
+

+
K a
1+sT a
Efd
Efd _ min
VS
Figure 11. Modèle simplifié
du système d'excitation IEEE-type ST1A.
La grandeur Vref, est la consigne de
tension déterminée pour satisfaire les conditions de
l'état équilibré. Le régulateur de tension compare
le signal Vt (un signal continu proportionnel à la valeur
efficace de la tension alternative du générateur) à la
tension de consigne Vref .Un signal complémentaire
VS peut être ajouté au noeud de comparaison : il s'agit
d'un signal issu de certains dispositifs spécifiques de commande comme
les stabilisateurs de puissance (PSS). Ensuite, le signal d'erreur est
amplifié pour donner la tension d'excitation demandée
Efd. La constante de temps et le gain de l'amplificateur sont
respectivement Ta et Ka. Les valeurs
extrémales de la tension d'excitation (Efd _max,
Efd_min) sont fixées par un système de limitation.
E & = - + -
( ( ) )
K V V V E (13)
fd a réf t S fd
T a
La relation suivante décrit, tous calculs faits, le
fonctionnement du modèle : 1
La relation entre la tension d'excitation Efd
et la tension interne du générateur
E'q est donnée comme suit :
|
1
E & ' = ( ( ) )
E X X I E
- - ' - '
q fd d d d q
T ' do
|
(14)
|
1.3.2.2- Réseau de transport.
Le réseau de transport relie toutes les centrales
électriques dans un système de puissance et distribue la
puissance aux différents consommateurs. Les éléments
principaux du réseau sont les lignes aériennes à haute
tension, les câbles souterrains, les transformateurs et les jeux de
barres. Des éléments auxiliaires peuvent être
trouvés : des condensateurs en série, des réactances
shunts et des systèmes compensation, des systèmes de
protection..., (Machowski et al., 1998).
Pour la modélisation de notre système de
puissance, nous nous intéressons à établir le
modèle de transformateurs et le modèle de lignes de
transmission.
1. 3. 2. 2. 1- Modèle de
transformateurs.
Le transformateur permet d'élever l'amplitude de la
tension alternative disponible à la sortie de l'unité de
production pour l'amener aux niveaux requis pour le transport. A l'autre
extrémité de la chaîne, côté consommateurs,
les transformateurs sont utilisés pour abaisser la tension et la ramener
aux valeurs utilisées dans les réseaux de distribution -BT-.
Outre la transmission de l'énergie électrique
avec modification des tensions, les transformateurs peuvent être
utilisés pour contrôler les tensions de noeuds des réseaux
(Custem, 2002, I). Ce contrôle de tension utilise la variation du nombre
de spire des transformateurs. La figure (12) montre le schéma
équivalent du transformateur (sans circuit magnétique) : il est
doté de plusieurs prises (côté haute tension) permettant de
modifier le nombre de spires du primaire. L'impédance ZT
correspond à l'impédance équivalente totale vue du
primaire.
Dans certains transformateurs, la modification de spires
requiert de mettre l'appareil hors service et de changer manuellement les
connexions. Plus généralement, cette modification peut être
effectuée en charge c.-à-d. sans interrompre le courant qui
parcourt l'enroulement dont on modifie le nombre de spires. Le dispositif
correspondant, appelé régleur en charge, comporte un
contacteur conçu pour éviter la formation d'arcs
électriques (susceptibles d'endommager les contacts) et un moteur
électrique pour entraîner ce contacteur.
V1 ZT N1 N2 V2
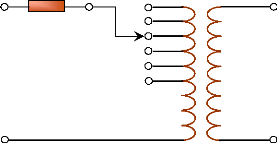
Figure 12. Modèle simplifié
de transformateur.
Si N1 est le nombre de spires côté haute
tension et N2 est le nombre de spires côté basse tension,
le rapport de transformation M est défini par :
N
M = (15)
1
N 2
La relation entre la tension du côté primaire
V1 et la tension du côté secondaire V2 à
vide
est :
V V 1
2 = (16)
M
Si la tension du primaire diminue, la tension du secondaire
peut être maintenue constante en diminuant le rapport M,
c.-à-d. en effectuant un changement de prise du côté
primaire. En charge, l'équation (15) n'est plus applicable à
cause de l'impédance ramenée au primaire du transformateur
ZT, mais le principe de fonctionnement reste le même (Andersson,
2006).
La figure (13) représente le schéma
équivalent en ð du transformateur sans circuit
magnétique (Milano, 2005). Dans notre étude, les régleurs
en charge ne sont pas modélisés : ainsi le rapport de
transformation reste fixe pendant les simulations dynamiques. Toutefois, nous
en tenons compte lors du calcul d'écoulement de puissance, de
manière à ce que les tensions restent dans leurs limites
autorisées et que la convergence de l'algorithme de l'écoulement
de puissance reste assurée (Tolba, 2005).
1. 3. 2. 2. 2- Modèle des lignes de
transmission.
Les réseaux de transport assurent la liaison entre les
centres de production et les zones de consommation. Ils permettent aussi
d'échanger de la puissance à travers les lignes d'interconnexion,
entre pays ou grandes zones relevant de gestionnaires de réseaux
différents (Bornard et al., 2005).
Les modèles des lignes de transmission utilisés
dans l'analyse dynamique des réseaux électriques sont
habituellement classés en trois groupes, en fonction des longueurs des
lignes, (longues, moyennes, courtes) (Sauer et al., 1998). Compte tenu
des longueurs et de la fréquence de fonctionnement, typiquement 50-60
Hz, une ligne de transmission se caractérise par un modèle
à constantes localisées (les phénomènes de
propagation sont négligés car L << ë / 2ð,
où ë est la longueur d'onde associée à la
fréquence f). La structure la plus

employée pour ce modèle est le schéma
équivalent en ð, figure (14). Il se caractérise par
trois paramètres principaux (Kundur, 1994) :
- une résistance série R.
- une réactance constituée d'une inductance de
série L due au couplage par champ magnétique entre les
conducteurs.
- une capacité de shunt C due au couplage par
champ électrique entre les conducteurs.

V1 Z / M V2


(1-M) / Z M (M-1) / Z


Figure 13. Modèle en ð du
transformateur.
V1 R jX V2
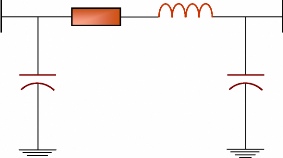
B / 2 B / 2
Figure 14. Modèle en ð d'une
ligne de transmission. 1.3.2.3- Modèle des
charges.
La charge représente :
- soit une charge matérielle réelle
- soit l'impédance d'entrée équivalente d'un
système de puissance, non explicitement représenté dans le
modèle du système.
En conséquence, lorsque les systèmes de
puissance sont analysés, seuls les réseaux et les
sous-réseaux de transport sont modélisés, tandis que les
réseaux de distribution ne le sont habituellement pas : ils sont
simplement remplacés par des charges équivalentes. Pour l'analyse
de la stabilité, chaque charge représente habituellement une
partie relativement importante du système comportant typiquement des
réseaux de distribution de basse et moyenne tension, de faibles sources
d'énergie fonctionnant au niveau de la distribution, les
régulateurs de tension de distribution, ... . Elle inclut
également les différentes charges réelles tels les
moteurs, les éclairages et les appareils électriques (Machowski
et al., 1998).
Les caractéristiques des charges ont une influence
importante sur la stabilité et la dynamique du système. En raison
de la complexité et la variation continuelle des charges et de la
difficulté d'obtenir des données précises sur leurs
caractéristiques, une modélisation précise des charges est
très difficile. Ainsi, des simplifications sont indispensables selon le
but de l'étude demandée. Pour les études de
stabilité dans lesquelles la gamme de temps considérée est
de l'ordre de 10 secondes après la perturbation, les modèles de
charges les plus utilisés sont généralement des
modèles statiques. Le caractère statique est lié à
la description de la charge par des équations purement
algébriques (Andersson, 2004).
Soit un noeud de tension VL, auquel une charge
consommant une puissance PL + jQL est reliée. Cette
charge peut être représentée par des admittances statiques
GL = PL/ VL2 et BL = QL/ VL 2 comme le
montre la figure (15), (Custem, 2002, I).



VL
PL , QL
GL
- jBL


Figure 15. Modélisation d'une
charge par son admittance équivalente.
L'admittance équivalente de charge est calculée
après avoir déterminé les données
nécessaires de l'étude de l'écoulement de puissance :
P Q
Y = - (17)
L L
L V
j
V 2 2
L L
1.3.2.4- Mise en équations du réseau de
transport.
L'établissement du modèle
généralisé du réseau de transport et des charges
implique de déterminer les équations algébriques
représentant les interconnexions entre les circuits des
générateurs et l'ensemble des transformateurs, des lignes de
transmission et des charges du
système. Le problème est ainsi de
déterminer et de mettre en équations le fonctionnement du
macro-modèle du réseau de transport. Le réseau
électrique peut être décrit sous la forme matricielle
suivante :
[I]=[Y]·[V] (18)
Où : [I] : le vecteur des courants
injectés aux noeuds du réseau.
[V] : le vecteur des tensions aux noeuds du
réseau.
[Y] : la matrice d'admittance du réseau de
transport.
Les simplifications du réseau de transport permettent
d'utiliser les modèles d'éléments du réseau
précédent à savoir :
- les transformateurs, représentés par un
schéma équivalent en ð.
- les lignes de transmission, représentés
également par un schéma équivalent en ð.
Ces différents schémas en ð sont
assemblés conformément à la topologie du réseau. A
cet ensemble, nous ajoutons les admittances shunt représentant les
charges ainsi que les réactances provenant des machines (Custem, 2002,
II).
Commençons par la "construction" de la matrice admittance
[Y]. Cette matrice se compose de termes diagonaux [Y]
ii et des termes non-diagonaux [Y]
ij , (Custem, 2002, I) :
- les termes [Y] ii , (self
admittance), représentent la somme de toutes les admittances
connectées aux noeuds i.
- les termes [Y] ij , (l'admittance mutuelle),
représentent la somme de toutes les
admittances joignant les noeuds i et j, au
signe près.
Partant de l'idée que tous les noeuds du réseau
sauf les noeuds internes des générateurs n'ont pas d'injection de
courant, le principe de la méthode de Kron peut ainsi être
appliqué pour la réduction du réseau (Arthur R. Bergen
et al., 2000).
Sachant que la somme de tous les courants dans chaque noeud de
charge vaut zéro, les noeuds des charges dans l'équation (18)
peuvent donc être éliminés. L'équation (18)
s'écrit alors comme suit (Yu, 1983) :

? ?
? ?
=
? ?
? ?
? ?
L
? ? ?
??
In
0
Y Y
nn nr
M
Yrn
L L L
M
Yrr
?
?
?
? ?
·
? ? ?
??
L
V n
Vr
? ? ?
? ?
(19)
Où : n : l'indice des noeuds de
générateurs.
r : l'indice des noeuds restants.
m : l'indice de tous les noeuds du réseau.
En décomposant l'équation matricielle (19), nous
obtenons le système d'équations suivant :
· [ V r ]
(20)
[ ] [ ] [ ] [ ]
I Y V Y
n nn n nr
= · +

·
[ ] [ ]
+
0
]
· [ V n
Y V
rr r
[ ]
Y rn
Ce système d'équations peut être
reformulé comme suit :

[ ] [ ] [ ] [ ] 1 [ ]
Y bus = Y nn - Y nr · Y rr
- · Y rn (22)
Où : [Ybus ] est la matrice d'admittance
réduite du réseau électrique, car la dimension de cette
matrice a été ramenée de m×m à
n×n.
En introduisant l'équation (8) dans l'équation
(21), nous obtenons :
[ ] [ ] [ [ ][ ] [ ][ ][ ]]
I Y E e j X X I e
= · + -
' '
j ä j ä (23)
m q d q q
Avec : [ ] 1
[ ] [ ] 1 [ ' ] -
Y m = Y bus - + j X d (24)
Où [ ] [ ] [ jâ ]
Y m = Y m e représente la
matrice de l'admittance totale du réseau électrique
réduit.
Le courant de la ième machine du
réseau à n machines s'écrit dans le
référentiel (D-Q) comme suit :
|
Ii
|
n
j â ij
?= Y e
mij
j 1
|
( )
' ä ( ' ) ä
j
E e j X X I e
j j
j
+ -
qj dj qj qj
|
(25)
|
y compris le terme j = i.
Dans le référentiel (d-q)i de la
ième machine, cette dernière équation
devient :
|
n
I I e Y e jE X X I
- - ° +
= = + -
j ä â ä
( 90 ) ( ) ' '
i ij ij
?= ( )
j
qj qj dj qj
( )
dqi i mij
j 1
|
(26)
|
Avec ä ij = ä j-
ä i
En décomposant l'équation (26), nous obtenons les
expressions du courant de la ième machine suivant les axes
direct et en quadrature :
n
Idi
Y mij
?
Re( )
I dqi
1
j
n
Iqi
Y mij
?
Im( )
I dqi
1
j
( )
- + -
S E X X C I
' '
ij qj qj dj ij qj
(27)
( )
( )
C E X X S I
' '
ij qj qj dj ij qj
+ -
( )
= +
cos( )
â ä
ij ij
Avec :
C ij
S ij
(28)
L'ensemble de ces équations de courants
complété par les équations de tension correspondantes (6)
des machines, représente les équations de la partie
algébrique du modèle d'état général
présenté ultérieurement.
1.3.3- Les équations d'état
généralisé du modèle.
Comme nous l'avons présenté dans la
première partie de ce chapitre, un système de puissance est un
système dynamique non-linéaire, qui peut être décrit
par un ensemble d'équations différentielles ordinaires
non-linéaires couplées du premier ordre et un ensemble
d'équations algébriques, où les formes
générales de ces ensembles d'équations
différentielles et algébriques peuvent être
exprimées comme suit :
x i f i x x x n i n
& K K
= =
( 1 , 2 , , ) ; 1,2, ,(29)
|
0 ( 1 , 2 , , )
= K
h j x x x m
|
; 1,2, ,
j m
= K(30)
|
Les équations différentielles correspondent aux
fonctionnements dynamiques des générateurs, des systèmes
d'excitation et des autres éléments du système. Les
équations algébriques correspondent aux équations des
réseaux de transport et des stators des générateurs. La
solution de ces deux groupes d'équations détermine l'état
électromécanique du système à chaque instant.
Nous rappelons ci-dessous les équations décrivant
le modèle déduit du système de puissance :
1
ù& i T T D
= ( ( 1))
mi - ei - i i -
ù (31)
2 H i
ä& i =
ù0(ùi -1) (32)
E & = - - -
1 ' '
' ( ( ) )
E E X X I (33)
qi ' fdi qi di di di
T d i
0
E & = - + -
1 ( ( ) )
K V V U E (34)
fd a réf t S fd
T a
T = E ' I + ( X - X
' ) I I (35)
ei qi qi qi di di qi
V di = XqiIqi (36)
qi - X ' di I di (37)
'
V qi = E

V ti = V di +V
qi (38)
2 2

?
Idi
))
C I
ij qj
· - ·
( S ij
E X X
' + - '
qj qj dj
(
· ·
Yï
n
· ' + - '
E X X
qj qj dj
(
ij qj
I qi ? Yï · ( C ij j 1
· ·
La figure (16) représente les éléments du
modèle du système de puissance avec leurs interactions.
L'approche finale de la modélisation du système
de puissance implique une présentation de l'ensemble des
équations de ce système sous forme d'équations
d'état généralisées comme suit :
x & = f(x, u) (40)
y=g(x,u) (41)
Une telle forme représente un système invariant
dans le temps (système autonome). Où :
,
? ? ? ? ? ?
?
1 ?
?
?
?
?
,
?
1 ?
2
n
2
m
&
x1
&
& 2
x
?
x = M
&
xn
? x
? x
x M
= ?
?
? ? x
? u ? f ?
1 ? 1
?u f 2 ? 2 = ? ? ? ? ? ?
? ? ? ?
u M
= , f M
? ? ? ?
? ur ? ? fn ?
? y
? y
y M
= ?
?
? ? y
? g
? g
2
?
1 ?
(42)
g M
= ?
?
m
? ? g
x : vecteur d'état du système de
n variables.
x& : vecteur dérivé du vecteur
x par rapport au temps.
u : vecteur de r signaux d'entrée du
système.
f : vecteur de n fonctions non-linéaires
reliant les variables d'état xi et les signaux d'entrée
ui aux dérivées des variables d'état
x& i .
y : vecteur de m signaux de sortie du
système.
g : vecteur de m fonctions non-linéaires reliant
les signaux d'entrée ui et les variables d'état
xi aux variables de sortie yi.
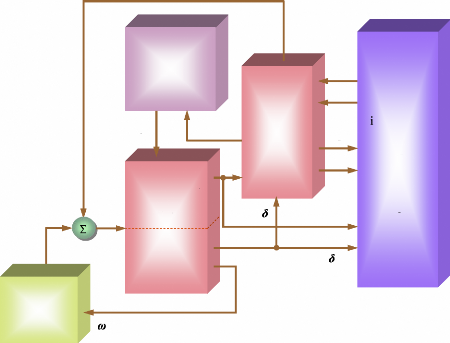
Turbine &
Gouverneur
Pm
Fm
+
Fe
_
Fa
Efd
Equations de
circuit du rotor
d'excitation &
Equations du
mouvement
Systèm e
AVR
k&
ù&
ä&
k& fd
q
'
Vt
E'q
Equations
de circuit
du stator
Pe
Vd
Vq
Vt
E'q
Vq
Iq
Vd
Id
Equations de
réseau de
transport
ncluant les
charges
statiques
Id
Iq
Figure 16. Digramme de l'ensemble des
blocs du système de puissance.
Les variables d'état permettent de décrire
complètement l'évolution dynamique du système par
n équations différentielles de premier ordre.
L'état et la sortie du système peuvent ainsi être
calculés, à tout instant, pour des conditions initiales
quelconques.
Quand les dérivées des variables d'état
x sont égales à zéro, (c.-à-d.
x& = 0), le système est à l'équilibre. Ainsi,
ce point d'équilibre est le point auquel toutes les variables
d'état sont constantes et le fonctionnement du système autour de
ce point est dit linéaire. La détermination de modèle
linéaire fait l'objet du paragraphe suivant.
1.4- Le modèle linéaire.
1.4.1- Introduction : Linéarisation du
modèle.
La quasi-totalité des systèmes dynamiques
réels possède des caractéristiques non- linéaires.
Le comportement dynamique d'un système de puissance peut être
décrit par un ensemble d'équations différentielles et
algébriques (EDA). Compte tenu que le système de puissance,
évolue généralement autour d'un point de fonctionnement
donné lors des petites perturbations, il est possible de
linéariser ses équations EDA autour de ce point.
Comme nous l'avons vu précédemment, le point de
fonctionnement normal du système se définit comme un point
d'équilibre ou une condition initiale. Les dérivées des
variables d'état en ce point sont donc égales à
zéro. L'équation (40) devient ainsi :
x&0
=f(x0,u0)=0 (43)
Où : x0 est le vecteur des variables
d'état correspondantes au point d'équilibre. u0 est le
vecteur d'entrée correspondant au point d'équilibre.
Si une petite perturbation se superpose aux valeurs
d'équilibre, l'équation (43) s'écrit : x x x f x x u
u
& = & + Ä & = + Ä + Ä
0 ( 0 , 0 ) (44)
Puisque ces perturbations sont petites, l'équation (44)
peut être développée en série de Taylor
limitée aux termes de premier ordre.
Alors, nous obtenons pour chaque variable d'état :
? f f ? i i
(45)
r
?
i i
? f f
x x x f x u
& & & L L
= + Ä = +
0 ( 0 , 0 ) ? Ä + +
x ? Ä +

x ? Ä + +
u ? Ä u
x 1
x n
i i i i 1 n 1
u 1
? ? ? ? u r
Avec : i = 1,2, K , n .
Etant donné que, x & i 0 = f
i ( x 0 , u 0 ) = 0 ,
l'équation précédente peut être mise sous la forme
suivante :
? f ? f
i f i ? i i
? f
Ä =
x & L L
? Ä + +
x ? Ä +
x ? Ä + +

u ? Ä u (46)
x x
1 n
i 1 n 1 r
1
u r
? ? ? u ?
? g
?
?
?
Nous pouvons appliquer les mêmes étapes de
linéarisation sur l'équation de la sortie (41) :
r (47)
j j
g g j j
g
Ä =
y ? Ä + +
x L 1 L
x
j 1 n
? ? ? ?
x u
1 n 1
u
? Ä +
x ? Ä + +

u ? Ä u
r
Avec : j = 1,2, K , m
Si le système fonctionne avec de petites perturbations au
voisinage du point d'équilibre,
? f i
nous pouvons supposer que toutes les dérivées
premières (,...) sont constantes dans le
? x i
domaine de fonctionnement.
Par conséquent, le système linéarisé
peut être représenté par les deux équations
suivantes:
Ä = ? Ä + + ? Ä + ? Ä + + ? Ä =
x a x a x b u b u i n
& L L K (48)
i i in n i ir r
1 1 1 1 , 1,2, ,
Ä = ? Ä + + ? Ä + ? Ä + + ? Ä =
y c x c x d u d u j m
j j jn n j jr r
1 1 1 1 , 1,2, , (49)
L L K
En écrivant ces deux équations sous forme
matricielle, nous obtenons le modèle d'état linéaire final
suivant :
Äx&=AÄx+BÄu
(50)
Äy=CÄx+DÄu
(51)
Avec:
1
L
1
1 L
? f ? f
1 1
L
r
? u
?u
M
1
L
M
? f n n
? f
L
r
m m
?g
,
,
? g
? u
M
? u r
?u
1
? u?u
r
A
C
Où:
? f 1 ? f 1
?
?
?
M ?
?
?
? ?
L
? x n
?x1
M L
? f n n
? f
? x
n
L
? x 1
? g 1 1
L ? g
? g m m
1
? x?x
n
?g
? ? ? ? ? ?
??
B
D
?g
?u
M
?g
?
?
?
?
?
?
??
?
1 ?
?
?
?
?
??
(52)
(53)
A: matrice d'état (n×n).
B : matrice d'entrée (n× r).
C : matrice de sortie (m× n).
D : matrice de contrôle (m× r).
- Le nombre des variables d'état n
définit la longueur du vecteur d'état Äx, le nombre
de lignes et de colonnes de la matrice A, le nombre de lignes de la matrice B
et le nombre des colonnes de la matrice C.
- Le nombre r des variables d'entrées choisies
définit la longueur du vecteur d'entrée Äu et le
nombre de colonnes des matrices B et D.
- Le nombre des variables de sorties choisies m
définit la longueur du vecteur de sortie Äy et le nombre
de lignes des matrices C et D.
- La matrice A est appelée matrice
d'état ou matrice d'évolution, car elle contient la
description du comportement dynamique du système. Elle rend compte aussi
de l'évolution du système en régime libre, c.-à-d.
à commande nulle.
- La matrice B est appelée matrice de commande ou
matrice d'entrée. Elle rend compte du comportement dynamique du
système en réponse à une commande.
- La matrice C est appelée matrice d'observation.
Elle permet de relier la sortie à l'état.
- La matrice D est enfin appelée matrice d'action
directe qui relie directement la
commande à la sortie. Elle est en général
nulle dans les systèmes physiques ; le
système est dit "strictement propre" (Allenbach et
al., 2005, II).
1.4.2- Application au système de
puissance.
Lorsque le système de puissance est soumis aux petites
perturbations, les variables d'état du système restent au
voisinage de leurs valeurs initiales et la linéarisation du
système peut être aisément appliquée (CIGRE,
1999).
Les variables d'état proposées pour notre
système de puissance de n machines, représenté
par l'ensemble des équations (31) à (34), sont :
x E E
[ , , ' , ] T
Ä = Ä ù Ä ä Ä
Ä
i i i qi fdi
, 1, ,
i n
= K
(54)
Le développement du modèle linéaire de notre
système, explicité dans l'annexe B, nous donne l'ensemble des
équations suivantes :
? n n
1 ? 1
? D K K E '
ù& ù 1
ä
Ä = ? Ä ? ? = Ä ? ? = Ä T (55)
i i i ij j
( ) ( ) ? + Ä
2 ij qj mi
2 H 2 H
i ? j 1 j 1 ? i
Ä ä i = ù0Äù
i
& (56)
|
? ?
'
& 1 ä
n n 1
Ä = ? ? = Ä ? ? = Ä + Ä
E ' ?? ( ) ( E E
K ) ??
qi ' 4 ij j qj fdi
T K
doi ? j 1 3
j 1 ij ?
|
(57)
|
? n n ? ai
Ä = ? ? = Ä ? ? = Ä ? Ä
& 1 ä K
? K K K K E E
'
E ? + Ä U (58)
fdi ai ij j
( 5 ) ( )
ai ij qj
6 fdi Si
T T
ai ? j 1 j 1 ? ai
Les constantes de linéarisation
K1ij...K6ij sont des matrices carrées
d'ordre n. Les valeurs de ces constantes dépendent des
paramètres des générateurs, du réseau de transport
et des conditions initiales du système. Les éléments
diagonaux des matrices des constantes déterminent les
propriétés dynamiques des machines, tandis que les
éléments non-diagonaux représentent les interactions
dynamiques entre les machines (Yu, 1983).
L'ensemble d'équations ci-dessus peut être
représenté sous la forme de modèle linéaire
correspondant à l'équation (50).
Ce modèle d'état linéaire sera donc
utilisé pour analyser la stabilité du système.
1.4.3- Analyse du modèle linéaire. 1.4.3.1-
Introduction.
L'analyse des valeurs propres et l'analyse modale du
système de puissance linéarisé sont des outils "puissants"
pour étudier les propriétés dynamiques du système.
L'évaluation précise de la fréquence des oscillations
électromécaniques et de l'amortissement de ces oscillations peut
être déterminée à partir de l'analyse des valeurs
propres ; l'analyse modale permet quant à elle d'obtenir des
informations supplémentaires plus approfondies telle la nature des modes
(dominants ou non, ...).
1.4.3.2- Valeurs propres.
Après avoir établi le modèle
d'état linéaire correspondant à l'équation (47), la
caractérisation de la stabilité du système peut se faire
à partir de la matrice dynamique A et de ses valeurs propres
(première méthode de Lyapunov).
Considérons un système linéaire
défini par le modèle d'état (50), (51). En appliquant la
transformation de Laplace à ces équations, nous obtenons
l'ensemble d'équations suivant dans le domaine fréquentiel
complexe :
sÄx(s) =
AÄx(s) + BÄu(s)
(59)
Äy(s) =
CÄx(s) + DÄu(s)
(60)
La solution explicite de cet ensemble d'équations est
donnée comme suit :
Ä = ? ? Ä + Ä (61)
y ( s ) C ( sI A )
1 B u ( s ) D u ( s ) Où
: I est la matrice d'identité.
Ainsi, la réponse dynamique du système est
déterminée par l'équation caractéristique de la
matrice d'état A définie par :
det(ë·I-A)=0 (62)
Les valeurs ë qui satisfont l'équation
précédente sont appelées les valeurs propres du
système. Une valeur propre définit le mouvement du système
lié à une fréquence propre.
Une valeur propre -un mode- est caractérisée par
une fréquence d'oscillation et un amortissement. Elle est
représentée généralement par le nombre complexe
suivant :
ë=ó#177;jù (63)
Cette relation est équivalente à la relation
définissant les valeurs propres d'un système du deuxième
ordre (Brogan et al., 2000). Par suite :

ë=-ù n æ
#177;jù n 1 - æ (64)
2
Où : ó est la partie réelle de la
valeur propre (abscisse de convergence). ù est la pulsation
propre d'oscillation (rad/s).
ùn est la pulsation naturelle
d'oscillation (rad/s).
æ est le facteur d'amortissement d'oscillation.
Une matrice d'état de dimension n× n est
associée à n valeurs propres.
L'analyse des valeurs propres permet d'obtenir tout d'abord la
fréquence d'oscillation et le facteur d'amortissement.
La fréquence naturelle d'oscillation est donnée par
la relation suivante :
ù
f = (65)
2 ð
Le facteur d'amortissement détermine la
décroissance de l'amplitude d'oscillation. Il est donné par :
ó
-
=
(66)
ó 2 ù
2
+

æ
Dans un modèle linéaire, la solution des
équations linéaires du système décrit
l'évolution exponentielle au cours du temps de la perturbation. Ainsi,
cette solution peut être représentée par une combinaison de
fonctions d'exponentielles eëit représentant
les caractéristiques

temporelles associées à chaque valeur propre
ëi. Les constantes de temps ô =
1/ói caractérisent de façon
générale l'amortissement du système.
L'interprétation physique des signaux correspondants
aux fonctions de la forme eëit est simple. Elle est
illustrée par la figure (17) qui représente dans le plan complexe
l'allure des variations de tels signaux en fonction du temps, suivant la
position du point représentatif de ëi.
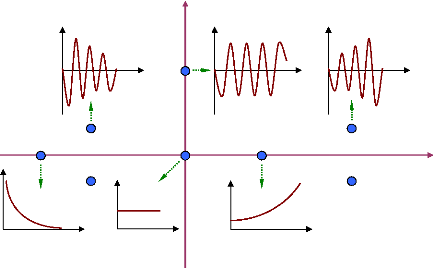
t
t
t
jù
t
ó
t
t
Figure 17. Analyse par lieu des
pôles de la stabilité d'un système.
- Une valeur propre réelle correspond un mode
non-oscillatoire. Si la valeur propre réelle est négative, les
exponentielles apparaissant dans la réponse temporelle sont des
fonctions décroissantes du temps. La rapidité de
décroissance est liée à la constante de temps
d'amortissement. Plus la valeur de l'abscisse de convergence ó est
grande, plus la constante de temps est faible et l'amortissement rapide.
- Par contre, si la valeur propre réelle est positive, le
mode présente une instabilité apériodique.
- En revanche, les valeurs propres complexes, en paires
conjuguées, correspondent aux modes oscillatoires. Le mode oscillatoire
peut être divergent, c.-à-d. instable, si la partie réelle
de la valeur propre est positive, il est au contraire amorti, c.-à-d.
stable, si la partie réelle est négative.
Cette analyse révèle qu'il est possible de
déterminer la nature (stable ou instable) d'un système
linéaire à partir d'une "inspection" de la position des
pôles de la fonction de transfert du système dans le plan
complexe. En outre, la connaissance de la position des pôles peut fournir
des renseignements sur le comportement du système lors de régimes
transitoires typiques tels que la réponse à une impulsion,
à un échelon, ... .
Des modes instables ou mal amortis peuvent être dominants :
leurs contributions déterminent alors l'allure de la réponse
temporelle globale du système.
Dans les réseaux électriques, il est
évidemment nécessaire que tous les modes du système soient
stables c.-à-d. placés dans la partie gauche du plan complexe.
1.4.3.3- Analyse modale.
Comme nous l'avons vu, les valeurs propres du système
déterminent les caractéristiques dynamiques du système
(fréquences et facteurs d'amortissement) ainsi que l'état de
stabilité du système.
L'analyse des vecteurs propres, qui découle de l'analyse
des valeurs propres, peut aussi fournir d'autres informations importantes.
Lorsqu'une instabilité ou un mode mal amorti prend
naissance dans un système de puissance, il est très
intéressant d'examiner les points suivants (Custem, 2002, I; Breulmann
et al., 2000) :
- les variables d'état liées aux modes
dominants.
- les éléments du système permettant
d'agir efficacement pour le stabiliser. - les groupes cohérents de
générateurs présentant des oscillations couplées. -
les signaux les plus efficaces à appliquer aux contrôleurs.
- les paramètres des contrôleurs réalisant un
"meilleur" amortissement.
L'analyse modale présentée par la suite concerne
les vecteurs propres, les facteurs de participation et les résidus.
1.4.3.3.1- Vecteurs propres.
Le modèle linéaire d'un système de
puissance peut être représenté, comme nous l'avons
déjà expliqué, par un modèle d'état
décrit par l'équation (50). Les vecteurs propres, à droite
et à gauche, de la matrice d'état du système peuvent
être calculés par les équations suivantes :
A? i = i ë? i (67)
ø i A= i
ëø i (68)
Où : ëi est une
ième valeur propre (toutes les valeurs propres
étant supposées distinctes). öi est le
ième vecteur propre à droite associé
à ëi.
øi est le ième vecteur
propre à gauche associé à ëi.
Pour une matrice d'état de dimension nx n, le
vecteur propre à droite est un vecteur colonne de dimension nx
1, tandis que le vecteur propre à gauche est un vecteur ligne de
dimension 1x n. Les deux vecteurs sont définis comme suit :
|
? ?1i
? ? ?2i
? M
=
i ?
? ? ?ni
|
?
?
?
?
?
?
|
, øi = [ø1i
ø2i L ø n i ] (69)
|
La relation caractéristique entre les vecteurs propres
à droite et à gauche est déterminée par leur
produit matriciel. Le produit matriciel entre deux vecteurs propres, à
droite et à
gauche, associés à deux valeurs propres
différentes vaut zéro. Par contre, lorsque les deux vecteurs
propres correspondent à la même valeur propre, leur produit
matriciel normalisé vaut 1. Ces propriétés peuvent se
résumer de la façon suivante :
?? 0 ; i j
?
ø ? (70)
i j 1 ;
= i j
? =
L'ensemble des vecteurs propres à droite du système
forme la matrice modale à droite, donnée comme suit :
Ö = [ ? 1 L ? i L? n ]
(71)
De même, la matrice modale à gauche est
formée des vecteurs propres à gauche :
Ø = ø 1 T L ø L
ø
[ ]T
T T
i n (72)
Le vecteur propre à droite, q'i, montre
l'influence relative de chaque variable d'état dans un mode
excité donné. Ainsi, pour un vecteur propre à droite
complexe, l'amplitude relative des éléments du vecteur indique le
degré de participation des variables d'état au mode
considéré. Quant à la phase des éléments du
vecteur, elle donne le déphasage des variables d'état dans le
mode donné.
En ce qui concerne le vecteur propre à gauche,
Ji, il détermine l'ensemble des variables d'état
participant relativement à la composition du
ième mode. Il indique également la
contribution de chaque variable d'état dans l'évolution du mode
considéré.
Dans le plan complexe, le diagramme représentant les
composantes d'un vecteur propre à droite, q'i, relatives aux
différentes variables d'état est appelé le "mode shape"
(Custem, 2002, II). Dans un système de puissance multimachines, le mode
shape indique la façon dont les générateurs oscillent les
uns par rapport aux autres, les deux cas limites étant les oscillations
cohérentes et les oscillations en opposition de phase (Bragasson, 2005).
Ainsi, les modes shapes du système peuvent identifier les groupes
cohérents des générateurs. En outre, le mode shape peut
confirmer le type de chaque mode. (Local ou interrégional).
1. 4.3. 3.2- Facteur de
participation.
L'approche standard, habituellement employée pour
évaluer la participation d'une variable d'état xk dans
le ième mode, étudie les
éléments correspondants du vecteur propre à droite
q'i. Bien que cette méthode soit simple à employer, elle
présente un défaut très sérieux, à savoir
les valeurs numériques des éléments des vecteurs propres
à droite dépendent des unités des variables d'état
correspondantes. Il est donc difficile de comparer les valeurs obtenues pour
des variables d'état différentes. Par conséquent cette
méthode est seulement exploitable pour des variables d'état ayant
les mêmes unités et jouant les mêmes rôles
(PérezArriaga, 1981).
Rappelons qu'un vecteur propre à droite q'i
mesure l'influence relative de chaque variable d'état xk dans
un ième mode et qu'un vecteur propre à gauche
Ji indique la contribution de l'activité de xk dans le
ième mode. Par conséquent, une
"quantité" caractéristique d'un mode donné peut être
obtenue par produit, élément par élément, d'un
vecteur propre à droite et d'un vecteur propre à gauche
correspondant. Cette quantité, appelée le facteur de
participation, est calculée par la relation suivante :
Ainsi, le facteur de participation peut fournir des
informations fines sur le problème : il représente une mesure
relative de la participation de la kème variable
d'état dans le ième mode, et vice versa (Hsu
et al., 1987; Kundur, 1994).
Etant donné que les matrices modales, à droite
et à gauche, Ö et Ø sont inverses, le facteur de
participation est donc une grandeur sans dimension. Ceci veut dire que le
facteur de participation, au contraire du vecteur propre à droite, est
indépendant des unités des variables d'état.
Les facteurs de participation peuvent être regroupés
dans une matrice, appelée matrice de participation P telle que :
Ñ = [ p 1p2 L
pi L p n ] (74)
Avec :
M
ö ø
ni in
M ?
?
?
p1 i
Ñi
p2 i
pni
ö1
ö2
ø ii
ø ii
?
1 ?
2
(75)
?
?
?
?
Dans la matrice de participation P, comme le montre
l'équation (76), la jème colonne indique
comment un jème mode participe relativement à
l'évolution des variables d'état du système tandis que la
ième ligne indique comment les différents
modes participent relativement à l'évolution de la
ième variable d'état (Custem, 2002, II).

p1
m
x1
M
M (76)
?
?
?
?
?
?
M
p11
L L
O
O
M
Ñi
O
O
M
M
p p
n nm
L L
1
xn
Une autre propriété intéressante du
facteur de participation pij s'interprète souvent
comme la sensibilité du jème mode aux
changements des termes diagonaux aii de la matrice
d'état du système A, (Van Ness et al.,
1994).
Pour les études de stabilité aux petites
perturbations, l'influence d'une source d'amortissement appliqué
à un générateur peut être déterminée
par les facteurs de participation, comme suit (Rogers, 2000) :
- si, pour n'importe quel mode, le facteur de participation
correspondant à la vitesse du générateur est nul,
l'introduction d'une source d'amortissement au générateur n'aura
aucun effet sur le mode.
- si le facteur de participation est réel positif, l'ajout
d'amortissement à ce générateur augmentera l'amortissement
du mode.
- en revanche, si le facteur de participation est réel
négatif, l'amortissement ajouté au générateur
réduira l'amortissement du mode.
En outre, les facteurs de participation, par leur
propriété de pouvoir déterminer les variables
d'état responsables des modes indésirables, peuvent être
employés pour trouver les points les plus efficaces pour installer des
contrôleurs de stabilisation.
La matrice de participation peut montrer aisément les
variables d'état les plus impliquées dans le mode
indésirable : les termes de la matrice P de plus grande amplitude de la
colonne relative au mode considéré indiqueront la participation
en question.
1.4.3.3.3- Résidus.
L'efficacité du signal d'entrée d'un
contrôleur de stabilisation ou l'emplacement optimal de ce dernier dans
un système de puissance multimachines peuvent être
identifiés par la méthode des résidus. Cette
méthode est dérivée de la relation entre la fonction de
transfert et le modèle d'état.
Le modèle d'état d'un système
représente à la fois les propriétés
d'entrée/sortie du système et le comportement interne du
système. A l'inverse, la fonction de transfert du système ne
concerne que la relation entrée-sortie du système.
Pour déterminer la relation entre la fonction de
transfert et le modèle d'état, nous prenons les équations
(50) et (51) pour un système monovariable (Single Input- Single Output
system), et nous considérons la fonction de transfert entre les
variables y et u.
Supposons que D = 0, les équations d'état
s'écrivent comme suit :
Äx&=AÄx+BÄu
(77)
Äy=CÄx (78)
y s
La fonction de transfert Ä s'écrit de la façon
suivante :
( )
Ä u s
( )
(79)
( ) -
Ä y s
( )
G s C sI A B
1
= = -
( )
Ä u s
( )
Pour un système en boucle ouverte, la fonction
G(s) peut être décomposée en
éléments simples comme suit :
n n
R R R R R
1 2 n i
G s
( ) = + + +
L = ? ?
i = (80)
( ) ( ) ( ) ( ) ( )
s s
- s s
- s s
- = = -
s s
-
n i i i ë i
s
1 2 1 1
Où :
s : l'opérateur de Laplace.
s1, s2, ...,sn : les pôles de
G(s) - les valeurs propres du système-. Ri :
le résidu de G(s) au pôle si.
Le résidu peut s'exprimer par la relation suivante
(Kundur, 1994):
R i =C Ö i
Ø i B (81)
D'après cette relation, nous remarquons que le
résidu Ri pour un mode ëi donné mesure la
sensibilité de ce mode à un signal de contre-réaction
sortie-entrée. Ainsi, les résidus peuvent déterminer les
modes les plus affectés par un signal de retour.
La figure (18) montre un système G(s)
équipé d'un contrôleur en contre-réaction de
fonction de transfert H(s).
Système
u(s) +
-
G(s)
H(s)
Régulateur
y(s)
Figure 18. L'ensemble
système-contrôleur en boucle fermée.
Lorsqu'on ferme la boucle par un régulateur
H(s), les valeurs propres du système initial
G(s) vont se déplacer. Le déplacement de ces
valeurs propres peut être calculé par l'équation suivante
(Aboul-Ela et al., 1996) :
Äë i = RiH(ë
i ) (82)
Cette équation montre que le déplacement des
valeurs propres, créé par le contrôleur, est proportionnel
aux amplitudes des résidus correspondants.
Pour un système multivariables, l'influence du
même contrôleur H(s), (sans se soucier de sa
structure et de ses paramètres) peut être étudiée en
différents emplacements. Si le résidu, associé à un
mode ëi donné, est calculé pour chaque emplacement,
le résidu le plus élevé indique donc l'emplacement le plus
efficace du contrôleur (Pagola et al., 1989). De même, en
changeant le signal d'entrée du contrôleur, différentes
valeurs des résidus vont être obtenues. Par conséquent, le
résidu le plus élevé indique le signal d'entrée le
plus efficace.
1.5- Conclusion.
Dans ce chapitre, nous avons présenté la
modélisation du système de puissance pour les études de la
stabilité aux petites perturbations. Nous avons aussi
présenté la linéarisation du système avec l'analyse
modale du modèle linéaire du système. Les points
d'étude principaux de ce chapitre sont présentés
ci-dessous :
- Le modèle choisi pour chaque machine synchrone du
système est du troisième ordre. Les équations
différentielles de la machine sont décrites par les trois
variables d'état : ä, ù et
E'q. Ce modèle convient bien pour les études
de stabilité angulaire aux petites perturbations.
- Le système d'excitation et la turbine et leurs
régulateurs sont aussi modélisés.
- Le modèle généralisé du
réseau de transport et des charges est déterminé. Dans ce
modèle, les circuits de stators des machines, les transformateurs, les
lignes de transmission et les charges sont représentées sous
forme d'équations algébriques.
- le système est représenté par un ensemble
d'équations, couplées, différentielles et
algébriques. Ce modèle décrit le comportement
non-linéaire du système de puissance.
- Le système de puissance est souvent soumis à
des petites perturbations qui se produisent continuellement sous l'influence de
faibles variations de charges et des sources. Ces perturbations sont
considérées comme suffisamment petites pour permettre de
linéariser les équations du modèle général
du système. La représentation d'état du système est
ensuite déduite.
- La stabilité du système est uniquement
définie par le lieu des pôles, dans le plan complexe, de sa
fonction de transfert.
- L'analyse modale du système donne des informations
importantes concernant les caractéristiques des modes d'oscillations,
les variables d'état participant à l'évolution de ces
modes, ... .
Après avoir enfin présenté les
modèles linéaire et non-linéaire du système, nous
présentons dans le chapitre suivant les différents types de
stabilité du système de puissance et plus particulièrement
la stabilité angulaire aux petites perturbations objet de notre
travail.
Chapitre II
Stabilité du système
de
puissance
2.1- Introduction.
La bonne performance d'un système de puissance
dépend de sa capacité de fournir à tout moment la
puissance demandée dans des conditions de qualité satisfaisantes,
en maintenant les niveaux de tension et de fréquence dans des limites
acceptables.
La stabilité est considérée l'une des
trois grandes études des systèmes de puissance, les deux autres
étant l'écoulement de puissance et l'analyse de défauts.
Il est clair que les études de stabilité sont les plus complexes,
tant en termes de modélisation que de méthodes de recherche des
solutions.
La stabilité d'un système de puissance est la
capacité du système, pour des conditions initiales
données, de retrouver un point d'équilibre suite à une
perturbation. Ainsi, la stabilité est une condition d'équilibre
entre des "forces" opposées et l'instabilité résulte d'une
perturbation menant à un déséquilibre important entre les
"forces" opposées.
Cette instabilité peut avoir différentes formes
et peut être influencée par différents facteurs. L'analyse
des problèmes de stabilité implique l'indentification des
facteurs essentiels contribuant à l'instabilité et le
développement de méthodes pouvant améliorer la
stabilité du système.
Le problème de la stabilité des systèmes
dynamiques a été et reste le sujet de préoccupation majeur
du travail des mathématiciens, des physiciens et des ingénieurs
(Hahn, 1967; Parks et al., 1981).
Les critères d'analyse de stabilité peuvent
être classés en deux grandes catégories :
- Les critères fréquentiels : tels les
critères de Nyquist, le diagramme de Bode, ... . Ces critères
dépendent de la fonction de transfert du système.
- Les critères temporels : tels les critères de
Kalman, les méthodes de Lyapunov, ... . Ces critères
dépendent du modèle d'état du système.
Une contribution majeure aux études de stabilité
fut apportée par A.M. Lyapunov en 1892, dont les travaux ont
été connus dans les années soixante. Il a introduit la
majorité des concepts et définitions de base concernant la
stabilité des systèmes représentés par des
systèmes différentiels arbitraires mais a aussi fourni les
principaux résultats théoriques.
La stabilité au sens de Lyapunov est une théorie
générale valable pour tout système décrit par des
équations différentielles linéaires ou
non-linéaires.
Ce chapitre traite de la stabilité du système de
puissance. Il est divisé en trois grandes parties. La première
partie rappelle les principes de la stabilité au sens de Lyapunov. Dans
la deuxième partie, nous rappelons les caractéristiques des
différents types de stabilité d'un système de puissance.
La troisième partie s'intéresse plus particulièrement
à la stabilité angulaire aux petites perturbations avec les
stabilisateurs de puissance (PSSs).
2.2- La stabilité au sens de Lyapunov. 2.2.1-
Définitions de la stabilité.
Considérons un système non-autonome
(dépendant du temps) et non-commandé (entrée nulle)
décrit par l'équation différentielle non-linéaire
:
x&(t) =
f(x(t),t) (83)
Où : x est un vecteur d'état et
x& sa dérivée dans le temps t.
Ce système est dit en équilibre autour d'un point
xe si, en l'absence d'influence externe, son état ne
varie pas au cours du temps :
f(xe,t) = 0 (84)
Ainsi, nous nous intéressons aux comportements des
trajectoires du système au voisinage de ses points
d'équilibre.
Nous rappelons dans ce qui suit quelques définitions
importantes qui forment l'approche de la stabilité au sens de
Lyapunov.
2.2.1.1- Stabilité du point
d'équilibre.
Un point d'équilibre xe est dit stable
si, pour tout å > 0, il existe une valeur
ä>0 tel que :




x(t0) - xe
<ä x(t) - xe
<å ?t = t0 (85)
Où, t0 est l'instant initial.
Dans le cas contraire, xe est dit
instable.


Ainsi, la stabilité au sens de Lyapunov signifie que la
trajectoire x(t), avec une condition initiale
x(t0), doit rester proche du point d'équilibre
xe (c.-à-d. x(t0) -
xe <ä), pour tout t = t0. Pour
cela, les solutions x(t) doivent rester à
l'intérieur de la région délimitée par
x(t) - xe < å ,
c.-à-d. rester dans un "tube" de rayon å autour de la trajectoire
x(t) = xe, figure (19), ( Fouad et
al., 1991).
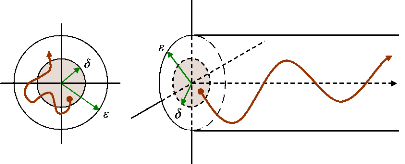
t
x(t)
t0
Figure 19. Stabilité d'un point
d'équilibre.
2.2.1.2- Stabilité asymptotique.
Un point d'équilibre est asymptotiquement stable s'il est
stable et si :
lim ( ) - =
t x t x
?8 e
0 (86)


La stabilité asymptotique signifie que non seulement le
point d'équilibre est stable, mais qu'on est aussi capable de
déterminer un domaine proche du point d'équilibre tel que
n'importe quelle trajectoire, issue d'un état initial
x(t0) appartenant à ce domaine, tende vers
xe quand t tend vers 8, figure (20), ( Fouad
et al., 1991).
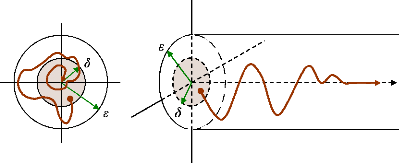
t
x(t)
t0
Figure 20. Stabilité
asymptotique.
Un ensemble d'états initiaux x(t0)
à partir desquels les trajectoires convergent vers un point
d'équilibre asymptotiquement stable est appelé un domaine
d'attraction D.
La stabilité asymptotique est la
propriété généralement recherchée en
pratique. Il faut cependant remarquer que la définition ci-dessus ne
donne pas d'information sur la vitesse à laquelle la trajectoire
x(t) converge vers l'équilibre. C'est pourquoi, on
introduit la notion de stabilité exponentielle qui permet de
caractériser cette vitesse.
2.2.1.3- Stabilité exponentielle.
Un point d'équilibre est exponentiellement stable si pour
tout å > 0, il existe des constantes a>0,
b)>0 et ä>0 tel que :
x(t0) - xe
<ä ( ) - < · ( 0 ) - · ? t =
t0 (87)
bt
x t x e a x t x e e -





Cette stabilité signifie que le vecteur d'état,
pour une condition initiale x(t0), converge vers un point
d'équilibre xe plus rapidement qu'une fonction
exponentielle ; b est appelé le taux de convergence. Par
ailleurs, la stabilité exponentielle implique la stabilité
asymptotique qui implique elle-même la stabilité d'un point
d'équilibre. La figure (21) illustre schématiquement la
définition de la stabilité exponentielle (Miller et al.,
1982).
2.2.2- Méthodes d'analyse de stabilité au
sens de Lyapunov. 2.2.2.1- Première méthode de Lyapunov
(méthode indirecte).
La première méthode de Lyapunov se base sur
l'analyse du comportement du système linéarisé autour de
son point d'équilibre. Plus précisément, on examine les
valeurs propres ëi du système de la matrice Jacobienne (la
matrice d'état) A évaluée au point
d'équilibre xe :
Les caractéristiques de stabilité de cette
méthode ont été expliquées dans le premier chapitre
(§§-1.4.3.2). Nous les rappelons ci-dessous :
- si toutes les valeurs propres de la matrice d'état sont
à partie réelle strictement négative (?i,
Réel(ëi (A)) < 0), le
système est exponentiellement stable à son point
d'équilibre. Dans ce cas, on a e
lim ?8 ( ) .
t x t = x
- si la matrice d'état possède au moins une valeur
propre à partie réelle strictement
.
positive ( ? i,
Réel(ëi (A)) > 0), le
système est instable. Dans ce cas, on a = 8
lim ?8 x ( t )
t
La première méthode est simple à
appliquer mais étant donné que cette méthode repose sur
une linéarisation du système, sa validité est alors
limitée à un certain voisinage du point d'équilibre.
Lorsque la linéarisation du système n'est pas possible ou
lorsqu'on veut analyser le système sans le résoudre
explicitement, on utilise la deuxième méthode de Lyapunov
(Slotine et al., 1991).
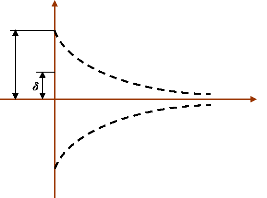
-
t
a e - · -
·
b ( t t0 )
a
a e - · -
·
b ( t t0 )
t0
Figure 21. Stabilité exponentielle.
2.2.2.2- Deuxième méthode de Lyapunov
(méthode directe).
La deuxième méthode de Lyapunov s'appuie sur une
observation physique fondamentale :
Si l'énergie totale d'un système,
linéaire ou non-linéaire, est continûment dissipée
(on parle de système dissipatif), alors le système doit tendre
finalement vers un point d'équilibre.
Ainsi, l'idée de Lyapunov, pour étudier la
stabilité d'un système donné, est d'examiner la variation
d'une seule fonction scalaire (appelée la fonction de Lyapunov)
dépendant de l'énergie totale du système (Khalil, 1996).
Autrement dit, cette méthode est basée sur la définition
d'une fonction de Lyapunov décroissante le long des trajectoires du
système à l'intérieur du domaine d'attraction. Cette
méthode s'énonce comme suit (Custem, 2002, II) :
Le point d'équilibre xe est stable
s'il existe dans un certain voisinage ? de ce dernier une
fonction de Lyapunov V(x) telle que :
· V(xe)=0
· V(xe)>0 pour tout x
dans ?
· V(x)=0
d dans ?
dt
Les deux premières conditions expriment la
présence de surfaces fermées entourant le point
d'équilibre xe. La troisième condition
exprime que les trajectoires du système soit restent sur ces surfaces,
soit coupent les surfaces en entrant à l'intérieur d'elles,
d'où la stabilité du point d'équilibre.
La deuxième méthode de Lyapunov permet, outre
l'analyse de stabilité d'un point d'équilibre du système,
de déterminer une partie de son domaine d'attraction en ce sens que
? est inclus dans D.
2.2.3- Conclusion.
Dans cette partie, nous avons rappelé les
définitions de la stabilité au sens de Lyapunov. Nous avons
également présenté les méthodes d'analyse de la
stabilité d'un système linéaire (1ère
méthode de Lyapunov) et d'un système non-linéaire
(2ème méthode de Lyapunov).
Dans la partie suivante, nous allons exposer les
définitions et les principales caractéristiques des
différents types de la stabilité de système de
puissance.
2.3- Les différents types de la stabilité
de système de puissance.
Pendant des années, des recherches diverses et
complexes étaient effectuées pour comprendre les problèmes
de stabilité des systèmes de puissance. Ainsi de nombreuses
définitions de la stabilité de systèmes de puissance
étaient proposées en insistant sur les divers aspects qui
reflètent la manifestation de l'état stable de système. La
définition la plus récente, que nous adopterons, est le
résultat d'un groupe de travail conjoint IEEE/CIGRE (IEEE/CIGRE,
2004).
La stabilité d'un système de
puissance est la capacité d'un système
d'énergie électrique, pour une condition de fonctionnement
initiale donnée, de retrouver le même état ou un autre
état d'équilibre après avoir subi une perturbation
physique, en gardant la plupart des variables de système dans leurs
limites, de sorte que le système entier reste pratiquement
intact.
Ainsi un système de puissance possédant un
état d'équilibre est considéré comme stable, si
suite à une perturbation, le système peut encore retrouver une
position d'équilibre. Le système est également
considéré comme stable s'il tend vers une autre position
d'équilibre située dans la proximité du point
d'équilibre initial. Cela correspond aux propriétés de la
stabilité du point d'équilibre au sens de Lyapunov.
La stabilité d'un système de puissance
électrique représente la propriété du mouvement du
système autour d'un état d'équilibre (c.-à-d. les
conditions de fonctionnement initiale).
Dans un état d'équilibre, toutes les
différentes forces opposées sont égales :
- soit instantanément : c'est le cas des points
d'équilibre,
- soit périodiquement : c'est le cas des variations
périodiques lentes en raison des petites fluctuations continuelles sur
les charges ou la génération.
Ainsi, la stabilité d'un système de puissance
dépend non seulement des conditions de fonctionnement initiales elle
dépend également de la nature physique et de l'amplitude de la
perturbation.
En raison de la taille, de l'importance et de la
complexité des problèmes de stabilité, il est très
intéressant de faire des simplifications et des hypothèses
appropriées pour représenter analytiquement le système.
Pour analyser et résoudre les problèmes
d'instabilité dans les systèmes de puissance, il est
indispensable de regrouper les différents groupes de stabilité.
Cette classification de la stabilité est basée sur les
considérations suivantes (Kundur, 1994) :
- la nature physique de l'instabilité
résultante.
- l'amplitude de la perturbation.
- la plage de temps nécessaire pour assurer la
stabilité.
- les dispositifs et les processus nécessaires pour
assurer la stabilité.
Habituellement, la stabilité est divisée en trois
groupes, à savoir : - la stabilité de l'angle de rotor.
- la stabilité de tension.
- la stabilité de fréquence.
La figure (22) présente ces principales catégories
de stabilité d'un système de puissance et leurs
sous-catégories.
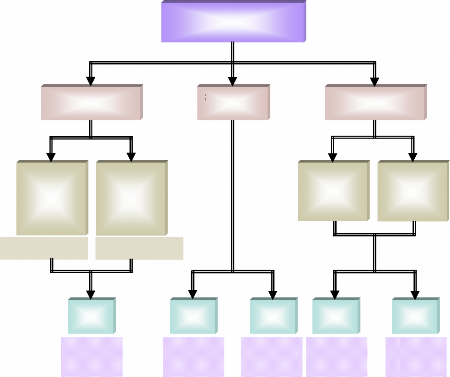
Stabilité dynamique
perturbations
Stabilité de
l'angle de
rotor aux
petites
Stabilité de l'angle
de rotor
de l'ordre de
10 à 20
secondes
court
terme
rotor aux
grandes
perturbations
Stabilité transitoire
Stabilité de
l'angle de
STABILITE DE SYSTEME
DE PUISSANCE
de l'ordre
de plusieurs
secondes
terme
court
Stabilité de la
fréquence
de l'ordre
de plusieurs
minutes
long
terme
Stabilité de
la tension
aux petites
perturbat ions
de l'ordre
de plusieurs
secondes
court
terme
Stabilité de la
tension
la tension
aux grandes
perturbations
Stabilité de
de l'ordre
de plusieurs
minutes
long
terme
Figure 22. Classification des
différents types de la stabilité de système de
puissance.
Traditionnellement, le problème de la stabilité
a été de maintenir le fonctionnement synchrone des
générateurs du système. Ainsi, pour avoir une production
satisfaisante de la puissance électrique, toutes les machines synchrones
du système doivent fonctionner en synchronisme. Cet aspect de la
stabilité est influencé par les dynamiques de l'angle de rotor de
générateur et de la relation puissance-angle.
L'instabilité peut également avoir lieu sans
perte de synchronisme. Par exemple, un système composé d'un
générateur alimentant un moteur à induction peut devenir
instable en raison de l'effondrement de la tension de la charge. Dans ce cas,
c'est la stabilité et le contrôle de la tension qui créent
le problème, plutôt que le maintien du synchronisme. Ce type
d'instabilité peut aussi se produire dans le cas de charges couvrant une
vaste zone dans un grand système.
Un autre type d'instabilité peut avoir lieu : dans
l'éventualité d'un fort écart entre la puissance de la
charge et la puissance de la génération, les contrôleurs
principaux des générateurs et de la charge deviennent importants.
S'ils ne sont pas bien coordonnés, il est possible que la
fréquence du réseau devienne instable. Des unités de
générations et/ou de charges peuvent finalement être
déclenchées en entraînant une panne du système. Dans
ce cas, les générateurs peuvent rester en synchronisme mais le
système devient instable.
2.3.1- La stabilité de l'angle de rotor. 2.3.1.1-
Introduction.
Etant donné que la génération de
puissance électrique dépend principalement des machines
synchrones, un aspect important est le fonctionnement de ces
générateurs au synchronisme (Custem, 2002, II). Au
synchronisme, les rotors de chaque machine synchrone du système tournent
à la même vitesse électrique et les angles entre les champs
magnétiques, rotoriques et statoriques, restent constants.
En fonctionnement nominal équilibré, la
puissance électrique fournie par le générateur aux charges
est égale, en négligeant les pertes, à la puissance
mécanique fournie par la turbine.
Quand le système est perturbé, la puissance
électrique de la machine varie rapidement, mais la variation de
puissance mécanique fournie à la machine est relativement lente.
En raison de cette différence de vitesse de réponse, un
écart temporaire d'équilibre de puissance a lieu. Par
conséquent, ce déséquilibre de puissance entraîne
une variation des couples agissant sur le rotor. Ceci entraîne une
accélération ou décélération du rotor selon
le sens du déséquilibre, voire un glissement du champ de
synchronisme en entraînant une perte de synchronisme du
générateur avec le reste du système (Basler et
al., 2005). Si l'équilibre de puissance n'est pas rétabli,
la machine est mise hors service par une protection de survitesse ou de perte
de synchronisme, et la stabilité du système est mise en
danger.
Suite à une perturbation au système, le facteur
principal qui détermine l'évolution de l'état du
système est l'écart entre les angles de rotor. (Les angles sont
mesurés par rapport à une référence tournante au
synchronisme). Nous pouvons dire que les angles de rotor d'un système de
puissance peuvent évaluer selon deux scénarios (Anderson et
al., 2003) :
- Soit, les angles de rotor s'accroissent ensemble et oscillent
à l'unisson. Ils peuvent
éventuellement atteindre de nouvelles valeurs stables.
Tant que les écarts entre les
angles de rotor restent constants, le système reste
stable et il demeure au synchronisme.
- Soit, un ou plusieurs angles de rotor s'accroissent plus
rapidement que les autres. Alors, les écarts entre les angles de rotor
divergent dans le temps. Le système devient par conséquent
instable et il perd le synchronisme.
Pour conclure, nous pouvons dire que :
La stabilité de l'angle de rotor concerne la
capacité des machines synchrones d'un système de puissance
interconnecté de rester en synchronisme suite à une perturbation.
Elle dépend de la capacité de maintenir/restaurer
l'équilibre entre les couples électromagnétique et
mécanique agissant sur le rotor de chaque machine synchrone dans le
système. L'instabilité qui peut résulter se produit sous
forme d'augmentation des oscillations angulaires de certains
générateurs pouvant conduire à une perte de synchronisme
avec d'autres générateurs.
Suivant l'amplitude de la perturbation, nous pouvons
caractériser la stabilité de l'angle de rotor en deux
sous-catégories :
2.3.1.2- Stabilité angulaire aux grandes
perturbations (stabilité transitoire).
Elle concerne la capacité du
système de puissance de maintenir le synchronisme après avoir
subi une perturbation sévère transitoire tel un court-circuit sur
une ligne de transmission ou une perte d'une partie importante de la charge ou
de la génération. La réponse du système implique de
grandes variations des angles de rotor. Elle dépend de la relation
non-linéaire couples- angles.
La stabilité transitoire dépend non seulement de
l'amplitude des perturbations et du point de fonctionnement initial mais elle
dépend également des caractéristiques dynamiques du
système. Elle se manifeste à court terme sous forme d'un
écart croissant de façon apériodique de certains angles de
rotor. Si l'instabilité se manifeste directement suite à la
perturbation (plus précisément dans la première seconde
qui suit l'élimination du défaut), elle est appelée
instabilité de première oscillation (First Swing Instability),
(cas 1, figure (23)), et elle s'étend sur 3 à 5 secondes.
L'instabilité transitoire peut aussi se manifester autrement. Elle peut
résulter de la superposition des effets de plusieurs modes d'oscillation
lents excités par la perturbation, provoquant ainsi une variation
importante de l'angle de rotor au-delà de la première oscillation
(instabilité de multi-oscillations), (cas 2, figure (23)). La gamme de
temps associée va de 10 à 20 secondes.
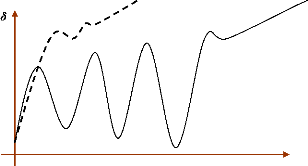
t (s)
Cas 2
Cas 1
Figure 23. Variation d'angle de
rotor.
Cas 1 : instabilité de première
oscillation. Cas 2 : instabilité de
multi-oscillations.
Le concept de stabilité transitoire peut être
expliqué par une approche graphique simple, à savoir le
critère d'égalité des aires (Equal Area Criterion). Cette
approche regroupe l'équation du mouvement et la courbe
(P-ä) traditionnelle représentant la relation entre la
puissance produite par le générateur et l'angle de rotor (Bergen
et al., 2000).
Pour expliquer cette approche, nous prenons un système
de puissance simple constitué d'un générateur synchrone
connecté à un jeu de barre infini via une ligne de transmission,
figure (24). Le générateur est modélisé par une
source de tension idéale Eg en série avec une
réactance Xg (modèle classique). La ligne et
le transformateur sont représentés par la réactance
XE.
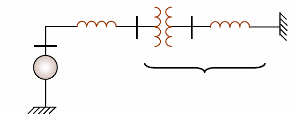
Eg?ä
Xg ETB ETH
XL
XT
XE = XT +
XL
Eo?0
Figure 24. Machine synchrone
connectée à un jeu de barre infini. 1- Relation
(P-ä) :
Dans l'état équilibré, la puissance produite
par le générateur Pe est donnée par
l'équation suivante :
E E
·
P (89)
g 0 · sin ä
e X X
g
=
+ E
Où, ä, l'angle de rotor (dit ici, l'angle
de puissance), est le déphasage entre la tension interne du
générateur (Eg) et la tension du jeu de barre
infini (E0). L'équation (89) est représentée
graphiquement à la figure (25).
0° äa äb 90° 180°
Figure 25. Relation puissance- angle de
rotor.

äb
äa



Lors de l'équilibre, la puissance électrique
Pe1 est égale à la puissance mécanique
appliquée pour l'angle correspondant äa.
Un brusque changement sur la charge du
générateur entraîne une variation de la puissance
mécanique, et par conséquent de la puissance électrique,
par exemple de Pe1 à
Pe2, figure (25). Le rotor va donc accélérer de sorte
que l'angle de puissance augmente, de äa à
äb, pour pouvoir fournir une puissance supplémentaire
à la charge. Cependant, l'accélération du rotor ne peut
pas s'arrêter instantanément. Ainsi, bien que la puissance
développée pour l'angle äb soit suffisante pour la
charge, le rotor va dépasser l'angle äb jusqu'à ce
qu'un couple opposé suffisant soit développé pour
arrêter cette accélération. L'énergie
supplémentaire va entraîner le ralentissement du rotor et la
diminution de l'angle de puissance. Suivant l'inertie et l'amortissement du
système, les oscillations de l'angle de rotor résultant vont ou
s'amortir, et la machine restera stable (cas 1, figure (26)), ou diverger, et
la machine deviendra instable en perdant le synchronisme avec le système
(cas 2, figure (26)).


Cas 2
instable
Cas 1
stable
Figure 26. Variation d'angle de rotor.
2- Critère d'égalité des aires
:
Considérons un défaut, tel un défaut sur
la ligne de transmission, appliqué au système
précédent disparaissant après quelques périodes du
système. Ceci va modifier l'écoulement de puissance et, par
conséquent, l'angle de rotor ä. Retraçons la courbe
(P-ä) en tenant compte de ce défaut, figure (27). En
dessous de cette courbe, nous pouvons considérer deux zones, (Gholipour
Shahraki, 2003) :
- La première zone (zone A1, zone
d'accélération) se situe au-dessous de la droite horizontale
correspondante au point de fonctionnement initial (la droite de charge). Elle
est limitée par les deux angles de rotor (ä0 et
ä1) correspondants à l'apparition et à la
disparition de défaut. Cette zone est caractérisée par
l'énergie cinétique stockée par le rotor du fait de son
accélération : Pm > Pe.
- La deuxième zone (zone A2, zone de
décélération), qui commence après
l'élimination du défaut, se situe en dessus de la droite de
charge : elle est caractérisée par la
décélération du rotor : Pm <
Pe.
o P P
( m e
-
2 H
) (90)
d 2
dt

2
Si le rotor peut rendre dans la zone A2 toute l'énergie
cinétique acquise durant la première phase, le
générateur va retrouver sa stabilité. Mais si la zone A2
ne permet pas de restituer toute l'énergie cinétique, la
décélération du rotor va continuer jusqu'à la perte
de synchronisme.
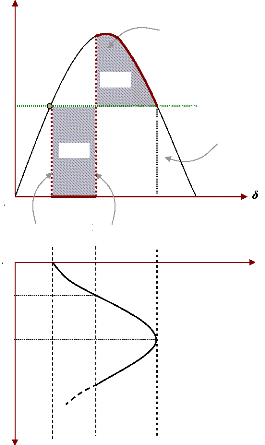
0° ä0 ä1
ä2 180°
a
P
Région stable
aire 1 A2
Pm = Pe
Région instable
aire A1
Apparition
de défaut
Disparition
de défaut
0 ä
t1
t2
t
b
Figure 27. Courbes (a :
puissance-angle) et (b : variation d'angle de rotor) du
générateur
suite à un défaut de
transmission.
La relation entre les aires des zones (A1 et A2) et la
stabilité transitoire peut être mathématiquement
expliquée comme suit :
Rappelons tout d'abord que l'équation du mouvement de
générateur est donnée par la relation suivante :
H : la constante d'inertie.
ùo : la vitesse de synchronisme.
Pm : la puissance mécanique fournie au
générateur. Pe : la puissance
électrique du générateur.
dä
En multipliant cette équation par 2· , en
intégrant par rapport au temps et en faisant
dt
un changement de variables, nous obtenons :
? 2
2 ä
d ä ù
?
? ? ?? + = ? - ·
cte o (91)

( )
P P d ä m e
dt H
ä 0
ä0 : l'angle de rotor, initial, à l'instant
de l'application de défaut. ä2 : l'angle de rotor à
la fin de la période transitoire.
dä
Ainsi, lorsque : t = = =
0 0 ,
ä ä 0 la constante cte = 0.
dt
Après l'élimination du défaut, l'angle
ä va s'arrêter de varier et le générateur va
retrouver
dä
sa vitesse de synchronisme, lorsque = 0.
dt
Par conséquent, l'équation (91) s'écrit
comme suit :
ä2
? ( ) 0
P m P e dä (92)
- · =
ä 0
ä 1 ä 2
(93)
? - · + ? - · =
( ) ( ) 0
P m P e d ä P m P
e d ä
ä 0 ä 1
Où : ä1 est l'angle de rotor à
l'instant de l'élimination de défaut.
A1-A2=0 (94)
Ainsi, la limite de la restauration de la stabilité
transitoire se traduit mathématiquement par l'égalité des
aires de la zone A1 et de la zone A2 : cette condition est appelée
critère d'égalité des aires (Equal Area Criterion).
Par conséquent, les contrôleurs de la
stabilité transitoire peuvent améliorer la stabilité soit
en diminuant la zone d'accélération (zone A1), soit en augmentant
la zone de décélération (zone A2). Cela peut être
réalisé soit en augmentant la puissance électrique, soit
en diminuant la puissance mécanique.
En outre, un système statique d'excitation avec une
tension maximale élevée et d'un régulateur de tension
possédant une action "puissante" et rapide représente un moyen
très efficace et économique pour assurer la stabilité
transitoire (CIGRE, 1999). Enfin, une amélioration signifiante de la
stabilité transitoire est obtenue avec des systèmes très
rapides de détection des défauts et de disjoncteurs.
2.3.1.3- Stabilité angulaire aux petites
perturbations (stabilité dynamique).
Elle se définie par la capacité du
système de puissance de maintenir le synchronisme en présence des
petites perturbations. L'instabilité résultante se manifeste sous
forme d'un écart croissant, oscillatoire ou non-oscillatoire, entre les
angles de rotor.
La stabilité aux petites perturbations dépend du
point de fonctionnement d'équilibre initial du système ainsi que
des caractéristiques dynamiques du système. Contrairement
à la stabilité transitoire, elle ne dépend pas de niveaux
de perturbations, car celles-ci sont arbitraires et infiniment petites (Custem,
2002, II).
La relation puissance-angle (89) est une relation
non-linéaire en sinus. Mais pour des petites perturbations, la variation
de puissance reste approximativement proportionnelle à la variation de
l'angle ä. Des exemples typiques des petites perturbations
peuvent être donnés par des variations de niveau de 10 % de la
puissance mécanique appliquée à une machine du
système ou sur sa charge,... (Anderson et al., 2003).
La stabilité transitoire, comme nous l'avons vu, est
associée à la présence d'un couple synchronisant
suffisant, immédiatement après la perturbation. Si le
système est transitoirement stable, la stabilité aux petites
perturbations sera associée à la présence d'un couple
d'amortissement à la suite de la première oscillation. Si ce
couple est suffisant, les oscillations s'amortiront (amortissement positif).
Par ailleurs, si l'amortissement n'est pas suffisant, les oscillations vont
continuer, ou même elles vont augmenter (amortissement négatif
c.-à-d. manque de couple d'amortissement).
La perte de synchronisme peut avoir lieu entre une machine et
le reste du système (provoquant une instabilité locale), ou bien
entre des groupes des machines, dans lesquels chaque groupe peut garder son
synchronisme (désignant une instabilité globale).
L'instabilité aux petites perturbations se manifeste
à court terme, la gamme de temps associée étant de l'ordre
de 10 à 20 secondes.
Ce type de stabilité va être étudié en
détail dans la partie (§§-2.4) de ce chapitre. 2.3.2-
La stabilité de tension.
La stabilité de tension, par
définition, se rapporte à la capacité d'un système
de puissance, pour une condition de fonctionnement initiale donnée, de
maintenir des valeurs de tensions acceptables à tous les noeuds du
système après avoir subi une perturbation. La stabilité de
tension dépend donc de la capacité de maintenir/restaurer
l'équilibre entre la demande de la charge et la fourniture de la
puissance à la charge. L'instabilité résultante se produit
très souvent sous forme de décroissance progressive de tensions
à quelques noeuds.
Suite à une perturbation, certaines charges ont
tendance à restaurer la puissance consommée avant perturbation.
C'est le cas des moteurs asynchrones, des charges dont la tension est
contrôlée par un régleur en charge automatique, des
chauffages électriques commandé par thermostat, ... . Il existe
une puissance maximale transmissible entre les centres de production et ceux de
consommation. Cette puissance maximale disponible dépend non seulement
des caractéristiques du réseau de transport (distances
électriques) mais également de celles des
générateurs (possibilité de maintenir la tension
grâce à une réserve de puissance réactive
suffisante). Par conséquent, si la puissance que les charges tendent
à
restaurer devient supérieure à la puissance
maximale transmissible, le mécanisme de restauration des charges va
contraindre le réseau haute tension en augmentant la puissance
réactive consommée et en faisant donc baisser progressivement la
tension du réseau jusqu'à des valeurs inacceptables (Custem,
2002, II).
Généralement, l'instabilité de tension se
produit lorsqu'une perturbation entraîne une augmentation de puissance
réactive demandée au-delà de la puissance réactive
possible.
Plusieurs changements dans le système de puissance peuvent
contribuer à l'instabilité de tension, ce sont par exemple :
- une augmentation de charge.
- des générateurs, des condensateurs synchrones, ou
des SVCs (Static Var Compensator systems) qui atteignent les limites de
puissance réactive.
- une tentative d'un régleur automatique en charge ayant
échouée de restaurer la tension de charge à son niveau
initial avant la perturbation.
- une panne de générateur, une perte d'une charge
importante ou un déclenchement de ligne.
- une perte d'une source de puissance réactive
(condensateurs, machines synchrones,...).
La plupart de ces changements ont des effets significatifs sur
la production, la consommation et la transmission de puissance réactive,
ainsi sur la stabilité de tension. Par conséquent, des mesures
peuvent être utilisées pour améliorer la stabilité
de tension, tels (IEEE/PES, 2002) :
- un contrôle automatique des condensateurs shunts.
- un blocage des régleurs en charge automatique.
- une nouvelle répartition de la
génération.
- une replanification du fonctionnement des
générateurs et des noeuds de commande. - une régulation de
tension secondaire.
- un plan de délestage.
La gamme de temps de l'instabilité de tension
s'étend de quelques secondes à plusieurs minutes. Ainsi,
l'instabilité de tension peut être considérée comme
un phénomène à court terme (de l'ordre de plusieurs
secondes) ou, dans l'autre cas limite, comme un phénomène
à long terme (de l'ordre de plusieurs minutes).
Pour l'instabilité de tension à court terme
l'effondrement de tension se produit immédiatement après la
perturbation. Dans ce type d'instabilité, les charges et les
dispositifs, qui ont des caractéristiques spéciales de puissance
réactive tels les moteurs asynchrones sont souvent impliqués. Les
moteurs asynchrones consomment, juste après la perturbation, beaucoup de
puissance réactive pour assurer leur stabilité vis-à-vis
leurs charge. D'autres éléments peuvent aussi participer à
cette instabilité : les charges commandées
électroniquement, les convertisseurs HVDC, ... .
L'instabilité de tension à long terme se
développe lors d'un manque graduel de puissance réactive d'un
noeud ou une partie du système. Elle implique, quant à elle, des
équipements ayant une action plus lente tels les régleurs en
charge automatique, les charges commandées thermostatiquement, ... .
Il est aussi important de noter que l'instabilité de
tension ne se produit pas toujours toute seule. Souvent, l'instabilité
de tension et l'instabilité de l'angle de rotor se produisent ensemble,
l'une pouvant entraîner l'autre.
Enfin, la stabilité de tension peut être
classée en deux catégories ; la stabilité de tension aux
grandes perturbations et aux petites perturbations :
- Stabilité de tension aux grandes
perturbations. Le souci dans ce cas est de maintenir des tensions normales
aux noeuds de réseau électrique après une grande
perturbation. La stabilité est déterminée ici par les
caractéristiques du système et de charge, et par les interactions
entre les différents dispositifs de commande de tension dans le
système (Passelergue, 1998).
- Stabilité de tension aux petites
perturbations. Dans ce cas, les caractéristiques de la charge et des
dispositifs de commande déterminent la capacité du système
à maintenir les tensions équilibrées.
2.3.3- La stabilité de
fréquence.
La stabilité de la fréquence d'un
système de puissance se définit par la capacité du
système de maintenir sa fréquence proche de la valeur nominale
suite à une perturbation sévère menant par
conséquent à un important déséquilibre, entre les
puissances produite et consommée.
Le maintien de la fréquence à une valeur
nominale dans un système de puissance est lié à
l'équilibre global entre les puissances actives produites et
consommées (y compris les pertes).
Autrement dit, suite à certaines perturbations,
l'équilibre global des puissances produite- consommée peut
être déséquilibré : ce déséquilibre
entraîne alors une variation de fréquence.
L'énergie cinétique stockée dans les
pièces tournantes des machines synchrones et autres machines
électriques tournantes peut éventuellement compenser ce
déséquilibre. Si ce dernier n'est pas trop grand, les
générateurs participant à la commande de fréquence
régleront la puissance active fournie à travers leurs
réglages secondaires fréquence-puissance et ramèneront
ainsi l'écart de fréquence à des valeurs acceptables. Par
ailleurs, si le déséquilibre est trop grand, l'écart de
fréquence sera significatif avec des graves conséquences
(effondrement complet du système), (Andersson, 2006).
Lorsque la fréquence varie, les caractéristiques
de temps des processus et des différents dispositifs activés vont
varier de quelques secondes à quelques minutes. La stabilité de
fréquence peut donc être classifiée en
phénomènes à court terme et à long terme.
Dans un grand système de puissance et suite à un
incident sévère et, par la suite, à l'action de
protections (par exemple, un déclenchement de plusieurs lignes de
transmission), l'instabilité de la fréquence est
généralement associée à l'îlotage où
un scénario typique peut avoir lieu. Un ou plusieurs sous-réseaux
se retrouvent isolés du reste du système. Les
générateurs de chaque sous-réseau résultant
essayent de garder le synchronisme entre eux, mais la réserve tournante
est nettement insuffisante pour faire face à la charge connectée
au sous-réseau. La fréquence décroît ainsi
rapidement et l'instabilité produite est donc à court terme.
L'instabilité de fréquence peut également
se manifester à long terme, lorsqu'elle provient d'une mauvaise
réponse en puissance des centrales ou d'une mauvaise coordination entre
des régulations et protections (Custem, 2002, II).
2.3.4- Conclusion.
Dans cette partie, nous avons présenté les
définitions et les caractéristiques des différents types
de stabilité d'un système de puissance. Le concept
général de la stabilité peut se synthétiser en
trois groupes (stabilité de l'angle de rotor, de la tension et de la
fréquence). Cette classification est nécessaire pour mieux
comprendre les mécanismes :
- des phénomènes de l'instabilité du
système.
- des dispositifs nécessaires pour assurer la
stabilité du système.
Historiquement, les chercheurs et les ingénieurs des
systèmes de puissance mettaient l'accent sur la stabilité de
l'angle de rotor. Or les opérateurs des systèmes de puissance se
trouvent actuellement souvent obligés de faire fonctionner leurs
systèmes aux limites de la stabilité. L'amélioration de la
stabilité angulaire aux petites perturbations, en particulier
l'amortissement des oscillations interrégionales, est donc devenue un
objectif prioritaire : elle sera développée dans la partie
suivante de ce chapitre.
2.4- Etude de la stabilité angulaire aux petites
perturbations. 2.4.1- Introduction.
Les problèmes des oscillations à faibles
fréquences ont toujours été un sujet de
préoccupation. Mais pendant plusieurs décennies, les
ingénieurs des systèmes de puissance se sont
préoccupés beaucoup plus de la stabilité transitoire. Les
origines de cette dernière étaient faciles à identifier et
des mesures correctives ont été mises au point.
Les oscillations, qui sont typiquement dans la gamme de
fréquences de 0,2 à 2 Hz, peuvent être excitées par
des petites perturbations dans le système ou, dans certains cas, peuvent
même prendre naissance spontanément.
Ces oscillations limitent la capacité de transmission
de la puissance et, parfois, peuvent même causer la perte de synchronisme
et un effondrement de l'ensemble du système. Dans la pratique, en plus
d'assurer la stabilité, le système doit être bien amorti :
c.-à-d. les oscillations doivent être atténuées le
plus rapidement possible dès leurs apparitions.
La stabilité angulaire aux petites perturbations peut
être améliorée en faisant varier une grandeur
électrique :
- physiquement : de manière à augmenter le couple
d'amortissement agissant sur le rotor des machines synchrones.
- mathématiquement: de manière à
déplacer vers la partie gauche du plan complexe les
valeurs propres
complexes correspondant à une oscillation instable ou mal amortie.
Parmi les grandeurs que l'on peut moduler dynamiquement nous
nous intéressons au signal supplémentaire injecté dans
l'entrée de l'AVR par le stabilisateur de puissance (PSS). Il agit
à travers le régulateur sur le couple
électromagnétique de manière à renforcer sa
composante d'amortissement.
Dans la dernière partie de ce chapitre, nous allons
détailler les éléments importants de la stabilité
aux petites perturbations tels :
- le rôle de la variation du couple
électromagnétique.
- l'influence du système d'excitation.
- les différents types d'oscillations à faibles
fréquences.
- le PSS et ses méthodes de réglages et de
localisation.
2.4.2- Variation de couple
électromagnétique.
Dans un système de puissance, l'écoulement de
puissance est lié aux positions angulaires des rotors de
générateurs. Les positions des rotors doivent être
réglées à tout moment pour faire face à tout
changement de conditions de fonctionnement (variations de charge, de puissance
de sortie de turbine,...). Un déséquilibre entre les couples
mécanique et électromagnétique agissant sur le rotor,
provoque une variation du mouvement du rotor, par rapport à une
référence synchrone tournante. Ainsi, le couple
électromagnétique joue un rôle important dans la
stabilité angulaire. Ce couple est généralement produit
par les interactions entre les trois circuits du stator de
générateur, le circuit d'excitation et d'autres circuits tels les
enroulements amortisseurs (Anderson et al., 2003).
Suite à une perturbation, les variations du couple
électromagnétique peuvent s'exprimer en fonction des variations
d'angle de rotor Ää et de vitesse Äù,
suivant l'équation (95), (DeMello et al., 1969) :
Ä = + = ? Ä ä + ? Ä
ù
T e T S T A K S K A(95)
KS : coefficient de couple
synchronisant.
KA : coefficient de couple d'amortissent.
2.4.2.1- Couple synchronisant TS.
Donné par la composante, T S = K S ?
Ää, il représente la variation de couple
électromagnétique en phase avec la variation d'angle de rotor
Ää.
Le couple synchronisant est produit par les interactions entre
les enroulements du stator et la composante fondamentale du flux de l'entrefer.
Ce couple tend à accélérer ou
décélérer le rotor pour le ramener à sa position
initiale. Il agit comme un couple de rappel d'un ressort d'un système
mécanique, masse-ressort (IEEE, 2003).
Pour des petites déviations du point de fonctionnement,
le coefficient de couple synchronisant KS est représenté
par la pente de la courbe de la relation (puissance - angle), comme le montre
la figure (28).
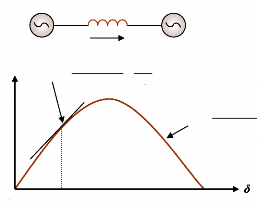
E1?ä
E2?
0
Pe
X
K 1 2 cos 0
E E ä
=
S
P
X
ÄP e
=
ä
Ä
E E
1 2 sinä
=
X
0° ä0 90° 180°
Figure 28. La relation (puissance- angle)
du générateur et le coefficient de
couple
synchronisant.
Si äo est l'angle de puissance
à l'état équilibré, entre la tension interne du
générateur (E1) et la tension du jeu de barre infini
(E2), la pente de courbe à äo est
simplement la dérivée de la fonction puissance - angle :
|
K S
|
=
|
dP e
|
|
E1
|
· E 2
|
cos
|
äo
|
(96)
|
|
dä
|
ä o
|
|
X
|
|
|
|
|
|
|
|
|
Le couple synchronisant détermine alors la
capacité du système de supporter une grande perturbation sans
perdre le synchronisme : il est un facteur important pour la stabilité
transitoire. En cas des petites perturbations, le couple synchronisant
détermine la fréquence des oscillations.
2.4.2.2- Couple d'amortissement TA.
Donné par la composante, TA =
KA ? Äù, il représente la
variation de couple électromagnétique en phase avec la variation
de vitesse de rotor Äù.
Ce couple résulte généralement des
interactions entre la séquence positive du flux de l'entrefer et les
enroulements du rotor, plus particulièrement les enroulements
amortisseurs. Comme nous l'avons déjà vu, une variation de
l'angle de rotor ä entraîne une variation de vitesse de
rotor, Äù. D'après la loi de Faraday, la f.
é.m. induite est proportionnelle à la variation de vitesse.
Le courant induit par cette f. é.m. interagit avec le champ
électromagnétique du générateur, en produisant par
conséquent un couple d'amortissement naturel. Ce couple tend à
amortir les oscillations électromécaniques de la machine en
particulier suite à la première oscillation résultant
d'une grande perturbation (Anderson et al., 2003). Ainsi, il est
essentiel pour la stabilité aux petites perturbations, où le taux
d'amortissement des oscillations de rotor est primordial. Mais souvent, ce
couple est faible et parfois négatif surtout en présence de
contrôleurs tels les contrôleurs de tension (ces derniers sont
pratiquement les seules sources d'amortissement négatif). Un couple
négatif conduit à une croissance spontanée des
oscillations jusqu'à la perte de synchronisme.
Actuellement, les problèmes de stabilité angulaire
aux petites perturbations sont considérés associés
à l'amortissement insuffisant des oscillations.
2.4.3- Influence du système d'excitation sur la
stabilité angulaire.
La stabilité angulaire dépend des deux
composantes du couple électromagnétique, TS,
TA, pour chaque machine synchrone du système. La
littérature montre qu'une insuffisance de couple synchronisant conduit
à une instabilité apériodique ou non-oscillatoire, alors
qu'un manque de couple d'amortissement conduit à une instabilité
dynamique (IEEE/CIGRE, 2004).
De même, la littérature montre que le
système d'excitation avec son régulateur de tension a un impact
important sur les deux couples et par conséquent sur la
stabilité. Généralement, lorsqu'il y a des variations de
tension, les deux puissances active et réactive transmissibles dans le
réseau de transport vont varier. Cela entraîne des interactions
indésirables entre les régulateurs de fréquence (puissance
active) et de tension (puissance réactive).
Les systèmes d'excitation modernes, ayant une
réponse rapide et une action "puissante", peuvent augmenter le couple
synchronisant. Ceci améliore donc la stabilité transitoire. Mais
cet avantage peut être contrebalancé par l'impact négatif
du système d'excitation sur l'amortissement des oscillations en
diminuant couple d'amortissement (Yu, 1983).
Ainsi, le fonctionnement du système d'excitation est
perturbé par le conflit entre les contraintes du contrôle durant
les quelques premières périodes du réseau après la
perturbation et le laps de temps suivant. Pour cela, nous distinguons deux
types d'effet du système d'excitation, à savoir : l'influence sur
la stabilité transitoire et l'influence sur la stabilité aux
petites perturbations (Anderson et al., 2003).
2.4.3.1- Influence sur la stabilité
transitoire.
Comme nous l'avons déjà expliqué,
l'objectif principal de la stabilité transitoire est de maintenir le
synchronisme pendant et suivant une perturbation sévère. La
durée qui nous intéresse est relativement courte (quelques
secondes au maximum), la première oscillation ayant une importance
déterminante. Durant cette phase, le générateur est soumis
à une variation considérable de sa puissance électrique et
ainsi à une accélération (ou
décélération) de son rotor. Un système d'excitation
rapide et puissante peut faire varier très rapidement la tension interne
du générateur, durant cette phase. Ceci va augmenter la puissance
électrique et le couple synchronisant produits pendant la
première oscillation. Par conséquent, la puissance
électromagnétique disponible va entraîner une diminution
importante de l'accélération du rotor et de l'angle de rotor bien
avant d'atteindre la limite de la stabilité transitoire : la marge de
stabilité sera donc augmentée.
Pour montrer clairement l'effet positif d'un système
d'excitation rapide et puissante sur la stabilité transitoire, reprenons
le système précédent (machine synchrone connecté
à un jeu de barre infini, figure (24)).
La figure (29) montre les effets de deux types de système
d'excitation, à savoir : - un système lent et peu puissante
correspondant à la courbe A.
- un système rapide et puissant correspondant à la
courbe B, sur un défaut de transmission (Basler et al.,
2002).
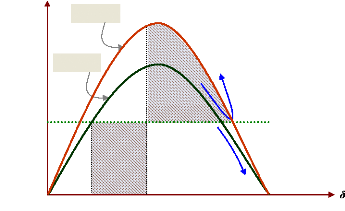
Cas B
Cas A
P
Pe-B
Maintenance du
synchronisme
Pm = Pe
Perte du
synchronisme
Pe-A
0° ä0 ä1 180°
ä2
Figure 29. Influence du système
d'excitation.
En comparant la zone hachurée située en dessous de
la droite de charge (zone d'accélération dans laquelle la
puissance électrique est moindre que la puissance mécanique)
avec la zone hachurée située au-dessus de la
droite de charge (zone de décélération), nous remarquons
que la condition d'égalité entre les deux zones n'est pas
assurée pour la courbe A. Par conséquent, la machine va perdre le
synchronisme.
Pour la courbe B, il est clair que la zone de
décélération est plus grande que la zone
d'accélération. La réserve de couple synchronisant permet
de restaurer la stabilité après l'élimination du
défaut.
Par conséquent, nous pouvons conclure que
l'augmentation du couple synchronisant, grâce à un système
d'excitation à gain élevé et réponse rapide,
augmente bien la puissance maximale transmissible pendant la phase transitoire,
et donc la marge de stabilité transitoire.
2.4.3.2- Influence sur la stabilité
dynamique.
L'action puissante et rapide du système d'excitation
pour améliorer la stabilité transitoire a malheureusement une
contribution négative importante sur l'amortissement des oscillations du
système.
Le courant d'excitation, qui agit pour améliorer le
couple synchronisant, est toujours en retard sur les caractéristiques
temporelles correspondantes aux parties électriques du
générateur et aux autres parties électriques du
système. A partir du moment de l'identification du changement
désiré d'excitation, le système d'excitation subit donc un
temps de retard inévitable. Pendant ce temps, l'état du
système oscillant va changer en impliquant un nouvel ajustement du
courant d'excitation. Le système d'excitation reste donc en retard, par
rapport au changement nécessaire. Par conséquent, le
système d'excitation va introduire l'énergie demandée
à contre temps. Les courants ainsi induits dans les circuits du rotor
s'opposeront aux courants induits initiés par l'écart de vitesse
du rotor (Äù). Le couple d'amortissement diminuera pouvant
atteindre des valeurs négatives : le comportement oscillatoire du
générateur va donc augmenter et une perte de stabilité
peut avoir lieu.
La figure (30) illustre l'influence du couple d'amortissement sur
la stabilité aux petites perturbations.
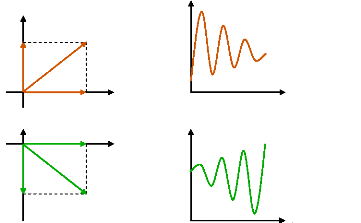
Ää
Ää
t
Système stable - TS positif
- TA positif
Système instable - TS positif
- TA négatif
t
Äù
TS
Ää
Äù
ÄTe
TA
TS
Ää
TA
ÄTe
Figure 30. Influence du couple
d'amortissement sur la stabilité.
2.4.4- Les différents types d'oscillations
à faibles fréquences.
Comme nous l'avons vu, les oscillations
électromécaniques sont associées aux rotors des
générateurs. Pendant ces oscillations, l'énergie
mécanique cinétique est échangée entre les
générateurs lors de l'écoulement de la puissance
électrique dans le réseau. Ces oscillations peuvent être
classées en deux groupes selon leurs manières d'évolution
:
- Oscillations spontanées. Dans ce cas, les
oscillations se développent lorsque l'amortissement d'un mode du
système devient négatif par changement graduel des conditions de
fonctionnement du système.
- Oscillations dues à une perturbation. Un
défaut de ligne de transmission, par exemple, peut entraîner des
oscillations en diminuant subitement l'amortissement d'un mode. Si cet
amortissement devient négatif, les oscillations résultantes vont
continuer ou même augmenter.
Les types des oscillations à faibles fréquences
rencontrées habituellement dans les systèmes de puissance peuvent
être classés en quatre groupes, figure (31).
Généralement, la fréquence de ces oscillations fournit une
bonne indication sur leurs types.
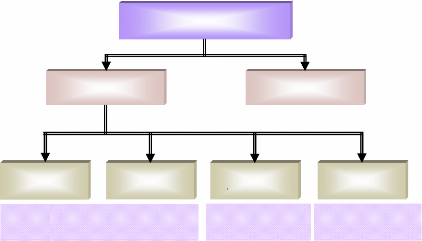
Modes électromécaniques
de 1 à 2 Hz de
0.2 à 1 Hz
Modes
locaux
Stabilité dynamique
Modes
interrégionaux
STABILITE DE L'ANGLE DE
ROTOR
Modes électriques
> 4 Hz
Modes
de contrôle
Stabilité transitoire
Modes mécaniques
> 4 Hz
de torsion
Modes
Figure 31. Classification de la
stabilité de l'angle de rotor. 2.4.4.1- Les oscillations
des modes locaux.
Les modes locaux sont les modes les plus rencontrés
dans les systèmes de puissance. Ils sont associés aux
oscillations entre un générateur (ou un groupe des
générateurs) d'une centrale électrique et le reste du
système. Le terme local est utilisé car les oscillations sont
localisées dans une seule centrale ou une petite partie du
système, (par exemple : les générateurs G1 et G2 oscillent
ensemble par rapport au générateur G3 trouvé dans la
même région, figure (32)). La gamme de fréquence de ces
oscillations est généralement de 1 à 2 Hz.
L'expérience montre que ces oscillations tendent
à se produire lors de l'utilisation des régulateurs de tension
possédant une réponse rapide et quand le lien de transmission
entre une centrale et ses charges est très faible (IEEE, 2003). Pour
assurer un bon amortissement de ces modes, des sources d'amortissement, tel le
stabilisateur de puissance, peuvent être ajoutées aux
générateurs à l'origine de ces modes.
2.4.4.2- Les oscillations des modes globaux.
Les oscillations des modes globaux, ou oscillations
interrégionales, sont associées à l'oscillation entre
certains générateurs d'une partie du système et certains
générateurs d'une autre partie du système (par exemple :
les générateurs, G1, G2, G3 et G4, de la région A
oscillent ensemble par rapport au générateur G5 de la
région B, figure (32)).
Les modes associés à ces oscillations
présentent généralement des amortissements très
faibles et, si ces derniers sont négatifs, de petites perturbations
peuvent exciter des oscillations divergentes. Les fréquences de ces
oscillations se trouvent généralement dans la gamme de 0.2
à 1 Hz. Cette gamme est inférieure à celle des modes
locaux car les réactances des liens entre les systèmes de
puissance sont élevées. Généralement, la
fréquence naturelle et le facteur d'amortissement d'un mode
interrégional décroissent lorsque l'impédance d'une ligne
d'interconnexion ou la puissance transmise augmente. Le système
d'excitation et les caractéristiques des charges affectent
également les oscillations des modes interrégionaux. Ainsi, ces
modes présentent des caractéristiques plus complexes que ceux des
modes locaux (CIGRE, 1996). Etant donné que les modes
interrégionaux impliquent plusieurs générateurs, un bon
amortissement de tels modes peut exiger l'utilisation de stabilisateurs de
puissance pour un grand nombre des générateurs (IEEE, 1990).
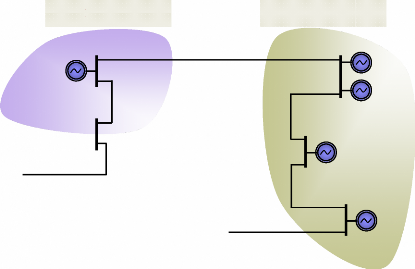
Région B Région
A
G3
G1
G2
G4
Figure 32. Système de puissance
simple à deux régions.
2.4.4.3- Les oscillations des modes de
contrôle.
Les oscillations associées aux modes de contrôle
sont dues :
- soit, aux contrôleurs des générateurs
(mauvais réglage des contrôleurs des systèmes d'excitation
ou des gouverneurs).
- soit, aux autres dispositifs contrôleurs (convertisseurs
HVDC, SVC,...).
La fréquence de ces oscillations est supérieure
à 4 Hz. 2.4.4.4- Les oscillations des modes de
torsion.
Ces oscillations sont essentiellement reliées aux
éléments en rotation entre les générateurs et leurs
turbines. Elles peuvent aussi être produites par l'interaction des
éléments de rotation avec le contrôle d'excitation, le
contrôle de gouverneur, les lignes équipées avec des
compensateurs de condensateurs en série,... . La fréquence de ces
oscillations est aussi supérieure à 4 Hz.
2.4.4.5- Conclusion.
Dans le cadre de cette étude, nous nous
intéressons seulement aux modes locaux et aux modes
interrégionaux : appelés modes électromécaniques.
La distinction claire entre les modes locaux et interrégionaux
s'applique principalement aux systèmes qui peuvent être
divisés en régions distinctes séparées par de
longues distances. Par ailleurs, pour les systèmes où les
centraux sont distribués uniformément sur une large région
géographique, il est difficile de distinguer entre les modes locaux et
interrégionaux à partir de considérations
géographiques. Cependant, une conclusion commune considère que
les modes interrégionaux ont les fréquences les plus basses et
que la plupart des générateurs du système y
contribuent.
2.4.5- L'amortissement.
Nous avons vu que les oscillations
électromécaniques limitent la capacité de transmission de
puissance dans les réseaux électriques. Elles peuvent parfois
entraîner une perte de synchronisme ou même un black-out dans le
système entier. Par conséquent, des sources spécifiques
d'amortissement sont indispensables pour assurer un fonctionnement fiable du
système.
La stabilité peut être considérablement
améliorée en utilisant des systèmes en boucle
fermée avec des systèmes de contrôle adaptés. Au fil
des années, un effort de recherche important était
effectué pour une meilleure conception de tels contrôleurs. Il y a
principalement deux moyens rapides permettant d'améliorer la
stabilité :
- l'utilisation d'un contrôleur côté
générateur : signal de contrôle supplémentaire dans
le système d'excitation du générateur.
- l'utilisation d'un contrôleur côté lignes
de transmission : signal de contrôle
supplémentaire dans les systèmes FACTS (Flexible AC
Transmission System).
Dans le premier cas, le problème d'oscillations
électromécaniques est résolu en ajoutant au
générateur un contrôleur spécifique appelé :
(Power System Stabilizer (PSS)). Ce contrôleur détecte les
variations de vitesse de rotor ou de puissance électrique du
générateur et applique un signal, adapté, à
l'entrée du régulateur de tension (AVR). Le
générateur peut ainsi produire un couple d'amortissement
additionnel qui compense l'effet négatif du système d'excitation
sur les oscillations (Kundur, 1994).
Les systèmes FACTS, qui sont des dispositifs
basés sur les récentes avancées en électronique de
puissance, peuvent être modifiés pour participer à
l'amortissement des oscillations électromécaniques. Les
systèmes FACTS (tels SVC (Static VAR Compensator), TCSC (Thyristor
Controlled Series Capacitor), SSSC (Static Synchronous Series Compensator),...)
sont principalement placés dans le système de puissance pour
différentes raisons, (tels le contrôle des transits de puissance,
des échanges de puissance réactive, les tensions de
réseau, ...). Toutefois, un contrôleur et un signal de
stabilisation supplémentaires peuvent être ajoutés pour
améliorer la stabilité. Outre ces principaux rôles, les
FACTS peuvent alors satisfaire les problèmes de la stabilité
(Rogers, 2000; Sadeghzadeh, 1998).
Ces systèmes restent très chers pour être
installés uniquement pour une raison d'amortissement des
oscillations.
Les contrôleurs PSSs qui sont des systèmes
simples et faciles à installer, pratiques, efficaces et moins chers,
sont les systèmes les plus utilisés pour améliorer la
stabilité aux petites perturbations. Nous allons donc les utiliser dans
notre étude.
2.4.5.1- Fonctionnement et modèle de
PSS.
Un PSS permet d'ajouter un signal de tension proportionnel
à la variation de vitesse de rotor dans l'entrée du
régulateur de tension (AVR) du générateur, figure (33). Un
couple électrique en phase avec la variation de vitesse de rotor est
ainsi produit dans le générateur. Par conséquent, avec un
système d'excitation rapide et fort, l'avantage présenté
par un couple synchronisant important est toujours assuré et le
problème de la décroissance du couple d'amortissement est
corrigé (Rogers, 2000; IEEE, 2003). Le PSS va s'opposer à toutes
les faibles oscillations en forçant le système d'excitation
à varier au plus juste et au bon moment.
Par conséquent, l'ensemble du système de
contrôle d'excitation (AVR et PSS) doit assurer les points suivants
(Kundur et al., 1989) :
- supporter les premières oscillations faisant suite
à une grande perturbation ; c.-à-d. assurer la stabilité
transitoire du système.
- maximiser l'amortissement des oscillations
électromécaniques associées aux modes
locaux ainsi
qu'aux modes interrégionaux sans effets négatifs sur les autres
modes.
- minimiser la probabilité d'effets défavorables,
à savoir :
o les interactions avec les phénomènes de hautes
fréquences dans le système de puissance telle la résonance
dans le réseau de transport.
o les instabilités locales dans la bande de l'action
désirée du système de contrôle. - être
suffisamment robuste pour permettre au système de contrôle
d'assurer ses objectifs pour divers points de fonctionnement probables du
système de puissance.
Le choix du signal d'entrée de PSS représente une
étape critique dans la conception du PSS. Plusieurs
considérations interviennent dans ce choix, telles :
- la sensibilité du signal d'entrée aux
oscillations électromécaniques (autrement dit, les modes
oscillatoires doivent être "observables" dans le signal choisi).
- l'insensibilité du signal d'entrée du PSS
à son propre signal de sortie. D'une façon similaire, la
sensibilité doit être très la plus faible possible pour les
signaux de sortie d'autres PSSs.
Un bon résultat peut être obtenu si
l'entrée du PSS est la variation de la vitesse de rotor
(Äù), la variation de puissance produite du
générateur (ÄPe) ou la fréquence
du jeu de barre
(Äf). Etant donné que le PSS est
utilisé pour produire un couple électrique proportionnel à
la variation de vitesse, il apparaît donc plus convenable d'utiliser la
variation de vitesse (Äù) comme entrée du PSS.
Cependant, quel que soit le signal d'entrée, la fonction de transfert du
PSS doit compenser les caractéristiques de phase du système
d'excitation, des parties électriques du générateur et des
autres parties électriques du système. L'ensemble de ces
dernières déterminent la fonction de transfert entre
l'entrée du système d'excitation (Ä Ver)
et le couple électrique du générateur
(ÄTe), (Larsen et al., 1981, I). Cette
fonction de transfert est dénotée GEP(s),
figure (33).

Partie
mécanique
du
générateur
_
Vref
+
+
VS
ÄVer
Vt


ÄTm
Système
d'excitation/
Régulateur
Partie
Efd électrique
du
générateur
+
ÄTe
_

PSS
Figure 33. Modèle simplifié
de liaison entre un PSS et le système.
Le type de PSSs le plus utilisé est connu sous le nom
de PSS conventionnel (ou PSS avance/retard). Ce type a montré sa grande
efficacité dans le maintien de la stabilité aux petites
perturbations. Ce PSS utilise la variation de vitesse de rotor comme
entrée. Il se compose généralement de quatre blocs, figure
(34) :
- un bloc d'amplificateur.
- un bloc de filtre passe-haut "filtre washout".
- un bloc de compensation de phase.
- un limiteur.
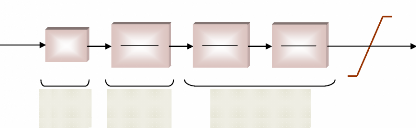
VS
max
VS
VS
min
_
_
Äù
KPSS
1 +
ST W
ST W
1+
1+
ST2
ST1
1+
1+
ST4
ST3
Bloc
avance/retard
Gain Filtre
Washout
Figure 34. Modèle d'un PSS
avance/retard.
1- L'amplificateur
Il détermine la valeur de l'amortissement introduit
par le PSS. Théoriquement, sa valeur (KPSS)
doit correspondre à l'amortissement maximal. Toutefois, la valeur du
gain doit satisfaire l'amortissement des modes dominants du système sans
risquer de dégrader la stabilité des autres modes ou la
stabilité transitoire (Kundur et al., 1989).
Généralement, KPSS varie
généralement de 0.01 à 50 (IEEE, 1990).
2- Le filtre passe-haut "filtre washout"
Il élimine les oscillations à très basse
fréquence (inférieure à 0.2 Hz) présentées
dans le signal d'entrée. Il supprime également la composante
continue de la vitesse (la composante "DC" correspondant au régime
statique) : le PSS ne réagit donc que lorsqu'il y a des variations de
vitesse. La constante de temps de ce filtre (TW) doit
être suffisamment grande pour permettre aux signaux, dont la
fréquence est située dans la bande utile, d'être transmis
sans atténuation. Mais, elle ne doit pas être trop grande pour
éviter de mener à des variations indésirables de tension
de générateur pendant les conditions d'îlotage.
Généralement, TW varie de 1 à 20
secondes (Basler et al., 2005; IEEE, 2003). Une amélioration
remarquable sur la stabilité de la première oscillation est
obtenue avec une valeur TW fixée à 10
secondes (Pal et al., 2005).
3- Le filtre compensation de phase
L'origine de l'amortissement négatif est, comme nous
l'avons vu, associée au retard de phase introduit entre le couple
électrique du générateur (ÄTe) et
l'entrée du système d'excitation (ÄVer).
Par conséquent, le PSS fournit l'avance de phase nécessaire pour
compenser le retard de phase de la fonction de transfert
GEP(s). Pratiquement, un bloc de phase d'avance pure ne
suffit pas pour réaliser la compensation de phase nécessaire ;
ainsi, un bloc d'avance/retard de phase est souvent utilisé. Pour mieux
garantir la stabilité du système, deux étages (au moins)
de compensations de phase sont nécessaires. La fonction de transfert de
chaque étage est une simple combinaison de pole-zéro, les
constantes de temps d'avance (T1,
T3) et de retard (T2,
T4) étant réglables. La gamme de chaque
constante de temps s'étend généralement de 0.01 à 6
secondes (Basler et al., 2005). Mais pour des considérations de
réalisation physique, les constantes de temps de retard (T2,
T4) sont considérées fixes et généralement
autour de la valeur de 0.05 secondes (Fleming et al., 1981).
4- Le limiteur
Le PSS est conçu pour améliorer l'amortissement
du système en cas de petites variations autour d'un point
d'équilibre. Son objectif n'est pas de restaurer la stabilité du
système aux perturbations sévères (la stabilité
transitoire). Le PSS a parfois tendance à perturber le bon
fonctionnement du régulateur de tension en le saturant lorsque ce
dernier essaye de maintenir la tension lors de conditions transitoires. Ainsi,
le PSS doit être équipé d'un limiteur afin de
réduire son influence indésirable durant les phases transitoires
(Larsen et al., 1981, II). Les valeurs minimales et maximales du
limiteur s'étendent de #177; 0.02 à 0.1 per-unit (IEEE, 1990).
2.4.5.2- Réglage des paramètres de
PSS.
Le problème de la conception d'un PSS est de
déterminer les valeurs de ses paramètres pour :
- augmenter l'amortissement des modes du système.
- assurer une stabilisation robuste.
La minimisation des risques probables des interactions
défavorables et des effets négatifs sur les autres modes
oscillatoires du système représente aussi un point critique
important qui influence le réglage de PSSs. En outre, les valeurs des
paramètres du PSS doivent être réglées sans
entraîner d'effet négatif dans la restauration de la
stabilité transitoire.
De nombreuses méthodes sont proposées dans la
littérature pour le réglage des paramètres de PSS.
Généralement, la plupart de ces méthodes sont
basées sur l'analyse des valeurs propres du système.
2. 4. 5. 2. 1- Méthode de compensation de
phase.
Pour expliquer le réglage des paramètres de PSS
par la méthode de compensation de phase, nous prenons un système
simple consistant en un générateur connecté à un
jeu de barre infini, figure (24). Le modèle linéaire de ce
système peut être graphiquement illustré par la
représentation de Heffron-Philips (Pal et al., 2005), comme le
montre la figure (35).
Les termes K1, ..., K6 sont les constantes de
linéarisation.
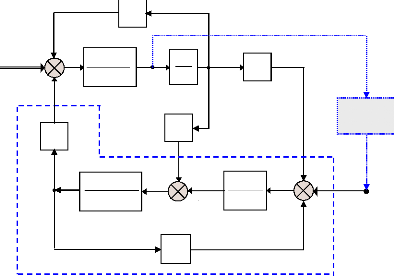
ÄTm +
ÄTe2
ÄTe1 _
ÄEq'
K2
_
K3
1 sT K
+ d' 0 3
1
D 2 Hs
+
K1
Äù
_
K6
K4
ù0
s
ÄEfd
+
Ä
ä K5
Ka
1+ sTa
GEP(s)
_
_
+
ÄVs
GPSS(s)
Figure 35. Modèle de
Heffron-Philips d'un système
(monomachine - jeu de barre
infini).
L'objectif principal d'un PSS est d'introduire une composante
d'un couple électrique sur le rotor de la machine synchrone ; ce couple
est proportionnel à l'écart entre la vitesse actuelle du rotor et
la vitesse de synchronisme. Lorsque le rotor oscille, ce couple agit comme un
couple d'amortissement pour atténuer les oscillations.
La fonction de transfert GEP(s) et le retard
de phase de la boucle électrique peuvent être
dérivés du modèle de Heffron-Philips. Ils sont
donnés par les deux relations suivantes (Yu, 1983) :

'
)
+ K K K a 3 6
sT K
do 3
GEP s
( )
K K K
a 3 2
(1 )(1
+ +
sT a
(97)
s ë ó j ù
= = +
PhiGEP GEP s s = ë = ó +
j ù
= ? ( ) (98)
Avec ë= ó + jù est
la valeur propre calculée pour le système sans signal de
stabilisation.
Pour simplifier, nous considérons que les
paramètres à régler du PSS sont le gain
Kpss et les constantes de temps T1 et T3
(avec T1 = T3) ; les autres paramètres sont fixés (avec
T2 = T4). Ainsi, la fonction de transfert de PSS peut se
réécrire comme suit :
|
G s K
PSS PSS
( ) =
|
2
sT ? 1 + sT ?
w ? 1 K G s
? = . ( ) (99)
PSS f
1 + sT 1 sT
w ? + 2 ?
|
Etant donné que l'avance de phase du PSS
(PhiGPSS) est égale à la phase
PhiGEP, la constante de temps T1 est
donnée, tout calcul fait, par la relation suivante :
tan( )
â
T = T = (100)
1 3ù ó â
- · tan( )
1 ? 1 1 1 2
? ù ? ù ? ù
?
- - -
? T ? T ?
w
Avec, â = - -
?? Phi tan tan ? ? + ? ?
?? (101)
GEP ?? ?? + 2 tan
2 ó
? ?1+óT? ? 1 + ó T
w 2 ? ?
Le gain du PSS, quant à lui, est donné par la
relation suivante (Yu, 1983) :
=
4ùæH
n

GEP s
( )
G s f ( )
(102)
KPSS
K2
s=ë=ó
+jù

ù 1
o K
Avec, ù = (103)
n2 H
ùo : la vitesse de synchronisme du
système, en rad/s.
ùn : la pulsation naturelle
d'oscillation en rad/s.
La valeur ùn représente la
solution de l'équation caractéristique de la boucle
mécanique (figure (33)). Elle est définie par l'équation
suivante (coefficient d'amortissement D négligée).
2 + ù 1 = 0 , , = #177; ù
Hs o K avec s j n
2 (104)
2. 4. 5. 2. 2- Méthode du
résidu.
Nous avons vu que le filtre avance/retard du PSS est
utilisé pour compenser le retard de phase de la fonction de transfert
GEP(s). En déterminant la valeur du retard de phase,
nous pouvons ainsi calculer les constantes de temps (avance/retard)
nécessaires pour assurer la compensation demandée. Pour ce faire,
l'angle de phase de résidu peut être utilisé (Aboul-Ela
et al., 1996; Cai, 2004). Considérons la forme suivante de la
fonction de transfert du PSS pour un système à une
entrée/une sortie :
|
sT ?1+sT ?
W 1
H s K
( ) = · ·
PSS 1 sT ?? 1 sT ??
+ +
W 2
|
m
|
(105)
|
Où : m est le nombre d'étages de
compensation (généralement m = 2).
La figure (36) montre l'effet du résidu sur le
déplacement de valeur propre dans la partie gauche du plan complexe.
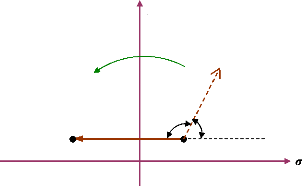
fù
Direction de rotation
Direction de Ri
öcom arg (Ri)
ëi 0
ëi 1
Äëi
Figure 36. Déplacement de valeur
propre par la rotation du résidu associé.
L'angle de phase öcom,
nécessaire pour diriger la direction du résidu Ri de
sorte que la valeur propre associée ëi se déplace
parallèlement à l'axe réelle, peut être
calculé par l'équation suivante :
? com =180°-arg(R i ) (106)
Où : arg(Ri) est l'angle de phase du
résidu Ri.

á
ù ·
i
T 1
2 (107)
=
|
Avec :
|
á
|
=
|
1 sin
-
|
? ? ?
com
? ?
? m ?
|
(108)
|
|
1 sin
+
|
? ? ?
com
? ?
? m ?
|
1 = á · T 2
T ,
Par conséquent, les constantes de temps T1 et
T2, du bloc avance/retard nécessaires pour obtenir l'angle
öcom, peuvent être calculées comme suit
(Aboul-Ela et al., 1996) :
Où : ùi est la fréquence du
mode ëi en rad/sec.
Pour calculer le gain KPSS, nous pouvons
réécrire la fonction transfert du PSS comme suit :
H(s) = K PSS ·
Hf(s) (109)
Le déplacement des valeurs propres est donné par
l'équation (82) que nous rappelons ci- dessous :
Äë i = ë i - ë i =
R i H ë i
1 0 ( ) (110)
En remplaçant l'équation (109) dans la
dernière équation, nous obtenons pour gain
KPSS la valeur littérale suivante (Sadicovic et
al., 2006) :
ë ë
i i
1 0
-
K PSS
Ri
· H f
( )
ë i
(111)
Une autre méthode peut être utilisée pour
régler le gain KPSS : la méthode traditionnelle de
Ziegler et Nichols basée sur l'étude du régime critique de
la réponse harmonique du système en boucle fermée. On
cherche ainsi le gain produisant l'instabilité. Le test consiste
à augmenter lentement le gain de stabilisateur jusqu'à
l'observation de l'instabilité. Pour un signal d'entrée de type
variations de vitesse, ce test doit être effectué avec une charge
maximale et des conditions de transport d'énergie satisfaisantes. Le
savoir-faire montre, en général, que le gain désiré
représente le tiers du gain à l'instabilité : Kst
= Kinst / 3, (Larsen et al., 1981, III).
2.4.5.2.3- Méthode de placement des
pôles.
Cette méthode consiste à déterminer les
valeurs des paramètres d'un PSS de sorte que tous les pôles du
système en boucle fermée se trouvent placés en des
positions spécifiées préalablement dans le plan
complexe.
Cette méthode peut être mathématiquement
décrite en considérant la représentation suivante du
système (Fleming et al., 1981; Aström et al.,
1996), figure (37).
Système
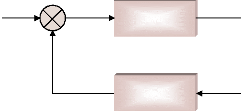
ÄV +
+
H(s)
G(s)


PSS
Figure 37. L'ensemble (système-PSS)
en boucle fermée.
Où : G(s) est la fonction de
transfert du système entre le signal de référence Ä
V du régulateur de tension de générateur,
où le PSS doit être installé, et la variation de vitesse de
rotor Äù.
H(s) est la fonction de transfert de PSS.
Les pôles de G(s) sont justement les
valeurs propres du système linéarisé en boucle ouverte. La
fonction de transfert du système entier en boucle fermée
F(s) devient :
=
F s
( )
1( ) ( )
- ·
G s H s
G s
( )
(112)
Les valeurs propres du système en boucle fermée
sont les pôles de la fonction de transfert F(s) ; elles
doivent satisfaire l'équation caractéristique suivante :
1-G(s)·H(s)=0 (113)
1
H s = (114)
( )
G s
( )
Si ë i , i = 1,2,L n
sont les valeurs propres spécifiées préalablement,
l'équation (114) peut ainsi se réécrire comme suit :
1
H ë
( )
ë = (115)
i G ( )
i
ë T 1 + ë T 1 + ë T
1
i W i 1 i 3
·
K · ·=
PSS 1 4
+ ë 1 1 ( )
i T W + ë i T + ë
ë
2 i i
T G
|
(116)
|
Par conséquent, nous obtenons un ensemble
d'équations algébriques linéaires. En résolvant ces
équations, nous pouvons déterminer les valeurs des
paramètres désirés du PSS qui assurent le placement
précis des valeurs propres.
2.4.5.3- Emplacement optimal des PSSs.
Tous les générateurs du système ne
participent pas aux modes dominants : tous les générateurs n'ont
donc pas besoin d'être équipés de PSSs. En outre, il faut
tenir compte des interactions négatives entre les PSSs qui augmentent
avec le nombre de ces derniers. Enfin, il faut tenir compte des critères
économiques.
Ainsi, la première étape de la mise en oeuvre
des PSSs, est de trouver les emplacements optimaux des PSSs nécessaires
et de déterminer leur nombre. Ce problème a fait l'objet, depuis
une dizaine d'années, d'un grand nombre de recherche
(Pérez-Arriaga et al., 1982; Hsu et al., 1987; Tse
et al., 1988; Ostojic, 1988; Pagola et al., 1989; Jin Lu et
al., 1990; Feliachi, 1990 ). Les approches les plus efficaces
proposées sont basées sur l'analyse modale du système
linéarisé :
- le mode shape.
- les facteurs de participations.
- les résidus.
Comme nous l'avons vu, les amplitudes des résidus
associés aux modes dominants de la fonction de transfert du
système en boucle ouverte peuvent être utilisées pour
déterminer les
placements les plus efficaces pour installer les PSSs. Les
amplitudes des facteurs de participation ou du mode shape permettent de
déterminer l'influence de chaque variable d'état dans les modes
oscillatoires associés. Ces méthodes peuvent donc nous fournir
des indications importantes sur l'emplacement optimal des PSSs dans le
système pour réaliser un meilleur amortissement par rapport
à des critères donnés.
Sachant que des emplacements différents des PSSs
entraînent des oscillations totalement différentes, des PSSs "mal
placés" peuvent donc ne pas répondre aux objectifs. Pour cela, il
faut bien choisir la méthode qu'il faut appliquer pour déterminer
les bons emplacements des PSSs. Les méthodes mentionnées
ci-dessus donnent généralement de bons résultats, mais la
recherche de méthodes plus efficace reste toujours actuelle.
2.5- Conclusion.
Dans ce chapitre, nous avons présenté d'une
façon générale les différents types de
stabilité. Nous avons présenté également une
analyse fine sur la stabilité aux petites perturbations et les
oscillations électromécaniques présentes dans les
systèmes de puissance. Cette étude nous a ainsi permis de mettre
en évidence les points importants suivants :
- Un système de puissance doit présenter un point
d'équilibre stable dans les conditions de fonctionnement normales.
- Un système de puissance est stable s'il retrouve un
état d'équilibre acceptable après avoir été
soumis à une perturbation.
- La stabilité angulaire aux petites perturbations est
habituellement considérée comme la capacité du
système de puissance à maintenir le fonctionnement synchrone des
générateurs pour de faibles variations des charges et des
sources.
- Les oscillations électromécaniques sont
généralement dues aux modes naturels du système. Ainsi,
nous ne pouvons pas les éliminer. Cependant, leurs fréquences et
leurs amortissements peuvent toujours être modifiés.
- Suite à une perturbation, le système de puissance
peut être transitoirement stable mais il peut présenter par la
suite des oscillations divergentes.
- Suite à une grande perturbation, le régulateur
de tension du système d'excitation de générateur, ayant
une action puissante et rapide, contribue efficacement à augmenter les
puissances électriques des générateurs pendant la
première oscillation. Cela contribue à diminuer la puissance
d'accélération du générateur en augmentant le
couple synchronisant. En conséquence, la plage de stabilité
transitoire est bien améliorée. Malheureusement, cet avantage est
contrebalancé par l'impact négatif du système d'excitation
sur l'amortissement des oscillations en diminuant le couple d'amortissement.
- Les oscillations interrégionales sont
associées aux lignes d'interconnexion de grande impédance et une
demande de puissance à transmettre élevée. Comme ces
oscillations se produisent entre plusieurs régions du système,
leurs caractéristiques sont plus complexes que celles des oscillations
des modes locaux et elles sont plus difficiles à amortir.
- Les stabilisateurs de puissance (PSSs), par leur
efficacité et leur coût réduit, sont les moyens habituels
non seulement pour éliminer les effets négatifs des
régulateurs de tension, mais aussi pour amortir les oscillations
électromécaniques du système. En
outre, l'amortissement assuré par les PSSs permet au
système de fonctionner au-delà même de la limite de la
stabilité à l'état équilibré.
- Le réglage des paramètres des PSSs et leurs
emplacements sont des facteurs critiques pour pouvoir assurer convenablement le
bon fonctionnement des PSSs.
Ce dernier point fera l'objet du chapitre quatre. Dans le
troisième chapitre, nous présentons tout d'abord les principes
généraux d'optimisation par algorithmes génétiques
; nous les utilisons par la suite.
Chapitre III
Optimisation par
algorithmes
génétiques
3.1- Introduction.
Au fil des années, de nombreuses recherches ont
été effectuées et de nombreuses approches ont
été proposées pour effectuer le meilleur réglage et
coordination des PSSs.
Dans les systèmes de puissance, nous avons besoin
d'installer plusieurs PSSs. Traditionnellement, les paramètres de ces
PSSs sont réglés séquentiellement et
séparément (Abe et al., 1983; Arredondo, 1997; Yee
et al., 2004). Dans les stratégies de réglage
séquentiel, basées sur les méthodes de réglage
présentées dans le chapitre précédent, les PSSs
sont alors conçus pour amortir les oscillations des modes, mode par
mode. Par exemple, la méthode linéaire séquentielle
(Linear Sequential Method, LSM) est basée sur les résidus. Dans
cette méthode, les PSSs sont réglés d'une manière
progressive (Yee et al., 2004) :
- on calcule tout d'abord les résidus de la fonction de
transfert du système en boucle
ouverte. Puis un PSS est ajouté et réglé en
utilisant les informations de ces résidus.
- ensuite, un second PSS est introduit et réglé en
se basant sur les informations des
résidus du système avec le premier PSS en place.
- ce processus continue jusqu'à ce que le système
atteigne des caractéristiques de stabilité satisfaisantes.
Une autre méthode séquentielle basée sur
le placement des pôles du système est connue sous le nom :
positionnement séquentiel des valeurs propres (Sequential Eigenvalue
Assignment) (Fleming et al., 1981). Dans cette méthode, les
paramètres des PSSs sont représentés comme des variables
dans les équations caractéristiques du système. Ces
équations sont résolues itérativement jusqu'à ce
que les valeurs propres se trouvent placées aux endroits
déterminés préalablement. La solution représente
les paramètres des PSSs recherchés. Comme les "bonnes" valeurs
propres spécifiées sont souvent choisies par expertise, les
valeurs déterminées des paramètres des PSSs peuvent
être situées en dehors de gammes correspondantes de fonctionnement
(Hong et al., 1999). De ce fait, la méthode doit être
appliquée de façon itérative jusqu'à obtenir des
paramètres adéquats.
Bien que les méthodes de réglage
séquentiel soient simples et aient donné
généralement des résultats satisfaisants pour
l'amortissement des oscillations, ces méthodes ne peuvent assurer une
optimisation globale des PSSs et, ainsi, la stabilité globale du
système. Les aspects négatifs de ces méthodes sont
liés aux hypothèses restrictives et à la nature intuitive
du processus de réglage (Fleming et al., 1981). En outre, les
interactions dynamiques entre les différents modes ont une influence
significative sur le réglage des PSSs : le réglage d'un PSS pour
stabiliser un mode peut ainsi produire des effets opposés sur les autres
modes.
La littérature montre qu'à la place des
méthodes de réglage séquentiel, une optimisation
simultanée des PSSs du système entier peut être
utilisée (CIGRE, 1999). Les méthodes d'optimisation
simultanée peuvent permettre d'atteindre plusieurs objectifs :
- une stabilité globale.
- un bon fonctionnement du système de puissance avec un
amortissement satisfaisant pour diverses conditions de fonctionnement et
configurations du système.
- une minimisation des interactions antagonistes possibles entre
les PSSs.
Grâce à la rapidité du
développement de l'informatique, l'utilisation des outils et des
algorithmes d'optimisation devient de plus en plus aisée et efficace.
Cette révolution informatique a permis une ouverture vers des
méthodes synthétiques telles les méthodes d'optimisation
stochastiques. A la différence des méthodes analytiques dans
lesquelles on
cherche à trouver une solution théorique exacte
ou une bonne approximation numérique, les méthodes stochastiques
constituent une approche originale dans laquelle on cherche à trouver
des solutions satisfaisant aux mieux différents critères souvent
contradictoires. Elles peuvent aussi synthétiser des solutions nouvelles
et originales sans idées préconçues.
La résolution d'un problème d'optimisation
consiste à explorer un espace de recherche afin d'optimiser (maximiser
ou minimiser) une fonction donnée (une fonction objectif) sous certaines
contraintes. La complexité du problème, en taille ou en
structure, relative à l'espace de recherche et à la fonction
à optimiser conduit à développer diverses méthodes.
Ces méthodes peuvent être regroupées en deux
catégories : les méthodes déterministes (classiques) et
les méthodes non-déterministes (stochastiques).
1- Les méthodes déterministes
:
Qualifiées de classiques (telles la méthode du
gradient, les méthodes énumératives,...), elles
n'utilisent aucun concept stochastique. Une méthode déterministe
utilise donc toujours le même cheminement pour arriver à la
solution, et nous pouvons donc déterminer à l'avance les
étapes de la recherche. Ces méthodes sont limitées par
leur "faible" espace de recherche. Elles requièrent des
hypothèses sur la fonction objectif à optimiser, telles que
continuité et dérivabilité de la fonction en tout point du
domaine des solutions. Elles consistent généralement à se
focaliser sur un point unique de l'espace de recherche en le
déplaçant au cours de temps dans le but de trouver un extremum.
Ces méthodes sont généralement efficaces lorsque
l'évaluation de la fonction est très rapide ou lorsque sa forme
est connue à priori. Mais, lorsque la dimension du
problème ou l'espace de recherche est grand, ces méthodes peuvent
:
- avoir des temps de calcul déraisonnables ou
- boucler et revenir sans cesse au même point.
Enfin, un grand nombre de fonctions à optimiser ne sont
pas dérivables et souvent même pas continues. Par
conséquent, ces méthodes restent limitées à des
problèmes très précis.
2- Les méthodes non-déterministes
:
Ces méthodes, qualifiées de stochastiques, sont
bien adaptées aux problèmes importants et complexes (tels les
problèmes discrets) ou même à des problèmes ayant
des multifonctions objectif. Dans cette famille de méthodes, on parle
couramment d'heuristique et de métaheuristiques.
Une méthode heuristique est une
méthode d'optimisation adaptée à un problème
particulier. Parmi ces méthodes, figurent la méthode de
Monte-Carlo, le recuit simulé, la recherche tabou, la méthode de
descente, ... . Ces diverses méthodes travaillent toujours à
partir d'une solution initiale en essayant de l'améliorer au maximum en
fonction des contraintes du problème étudié. Ainsi, elles
ont toutes un point commun : à savoir leurs itérations reposent
sur l'amélioration d'une solution unique. Leurs évolutions sont
ainsi basées sur la notion de parcours : l'évolution vers une
solution optimale se fait en testant successivement une solution voisine de la
solution courante. La figure (38) illustre une représentation simple
d'une méthode d'optimisation à parcours (heuristique).
Une méthode métaheuristique
consiste en une stratégie de choix pouvant piloter une ou plusieurs
heuristiques de manière abstraite, sans faire appel à un
problème spécifique. Les méthodes métaheuristiques
sont ainsi des méthodes à population de solutions : à
chaque itération, elles manipulent un ensemble de solutions en
parallèle (Osman et al., 1996). Ces
méthodes sont aussi considérées comme des
méthodes d'optimisation globale : elles visent la
détermination de l'optimum global de la fonction objectif du
problème, en évitant le "piégeage" dans l'un de ses optima
locaux. Elles comblent ainsi le handicap des méthodes classiques et des
méthodes heuristiques en conduisant la recherche vers l'optimum global.
En outre, ces méthodes font usage de l'expérience
accumulée durant la recherche de l'optimum, pour mieux guider la suite
du processus de recherche. Elles permettent ainsi d'explorer et d'exploiter
l'espace de recherche plus efficacement. Une représentation
schématique simple des métaheuristiques est donnée
à la figure (39).
Dans cette représentation, les métaheuristiques
(MH) tentent de trouver l'optimum global (OG) d'un problème
d'optimisation (f(x)) difficile (avec par exemple des
discontinuités (DC)), sans être piégé par les optima
locaux (OL).

Figure 38. Représentation
simplifiée d'une approche heuristique.
MH
f(x)
DC
OL
OG
x
Figure 39. Représentation
simplifiée d'une approche métaheuristique.
Les algorithmes évolutionnaires regroupent une
multitude de métaheuristiques différentes. Cependant, tous ont un
point commun : ils sont basés sur les principes de la théorie
évolutionnaire. Ils simulent l'évolution naturelle des structures
individuelles afin de trouver une solution optimale. Dans chaque
génération, une nouvelle approximation de
solution optimale se produit par des processus de
sélection des individus selon leurs performances dans le domaine du
problème. Les individus sélectionnés vont être
reproduits en utilisant des opérateurs empruntés aux
génétiques naturelles. Ces processus mènent à
l'évolution de la population des individus les mieux adaptés
à leur environnement (Pohlheim, 2005).
Ces méthodes reçoivent de plus en plus
d'intérêt en raison de leurs capacités potentielles
à résoudre des problèmes complexes. Sous le concept
d'algorithmes évolutionnaires, on trouve plusieurs méthodes tels
les algorithmes génétiques, la programmation
évolutionnaire, les stratégies d'évolution et la
programmation génétique. Les étapes communes de ces
méthodes peuvent être résumées comme suit
(Bäck, 1996) :
- une initialisation aléatoire d'une population
d'individus (des points de l'espace de recherche).
- une coopération et une compétition parmi les
individus de la population concernée selon les principes Darwinistes et
génétiques de la survie du "meilleur" (sélection,
croisement et mutation).
- un nombre d'itérations (générations)
faisant évoluer la solution (l'individu) courante et finissant par
atteindre la solution optimale.
Une caractéristique importante pour les algorithmes
évolutionnaires est l'absence d'information sur le gradient pour
élaborer les solutions. Cette propriété donne aux
algorithmes évolutionnaires une flexibilité satisfaisante leur
permettant d'être utilisés aisément dans une grande
variété de problèmes tels les problèmes fortement
non-linéaires, les problèmes non-continus, ... . De plus, les
algorithmes évolutionnaires travaillent sur un ensemble de points (une
population) et non pas sur un seul point ; cela augmente la probabilité
de trouver la solution optimale. Comme ces algorithmes utilisent les principes
stochastiques, ils ne demandent aucune structure particulière pour le
problème à optimiser.
Grâce à leurs nombreux avantages, les algorithmes
évolutionnaires sont appliqués avec beaucoup de succès
dans le domaine industriel et l'ingénierie. De nombreux problèmes
liés aux systèmes de puissance sont résolus par les
algorithmes évolutionnaires telles les répartitions
économiques, la prévision de charges, la planification de
génération, la coordination des contrôleurs, les
études de sûreté des systèmes de puissance,... .
Les algorithmes génétiques, forment une des
principales classes des algorithmes évolutionnaires ; ils ont
suscité beaucoup d'enthousiasme depuis plusieurs années. Leur
efficacité pour produire des solutions de qualité dans un grand
nombre de problème d'optimisation est maintenant bien établie.
Ils représentent les méthodes d'optimisations les plus
utilisées.
3.2- Les Algorithmes Génétiques (AGs).
3.2.1- Introduction.
Comme nous l'avons déjà indiqué, les
algorithmes génétiques sont des méthodes de recherche
stochastiques de solutions basées sur des mécanismes s'inspirant
de processus naturels (sélection) et des phénomènes
génétiques (croisement et mutation). Les travaux de scientifiques
du XIXe siècle (Lamarck, Darwin, Mendel,...) et du
XXe siècle (Watson et Crick) ont permis de mettre en
évidence les principaux mécanismes à l'oeuvre au cours de
l'évolution des populations. Ces recherches ont débouché
sur l'idée que l'évolution repose
d'une part sur l'intervention du hasard au cours des
croisements et des mutations, et d'autre part, sur un processus de
sélection des individus les plus aptes à survivre dans un
environnement donné. C'est précisément cette notion de
hasard guidé par la sélection qui est à la base des
algorithmes génétiques.
Dans les années soixante et soixante-dix, le professeur
J. Holland à l'université de Michigan (Holland, 1975) a
développé, sur la base des travaux précédents, les
principes fondamentaux des algorithmes génétiques, son objectif
étant de concevoir des systèmes artificiels possédant des
propriétés similaires aux systèmes naturels. L'ouvrage de
Goldberg (Goldberg, 1989) a permis de mieux faire connaître les
algorithmes génétiques et il a marqué le début de
l'intérêt actuel pour ces techniques.
La théorie des algorithmes génétiques
utilise un vocabulaire similaire à celui de la génétique
naturelle. Cependant, les processus naturels auxquels elle fait
référence sont beaucoup plus complexes que les algorithmes
génétiques.
On définit ainsi un individu dans une population.
L'individu est représenté par un ou plusieurs chromosomes
constitués de gènes qui contiennent les caractères
héréditaires de l'individu. Les principes de sélection, de
croisement, de mutation utilisés s'appuient sur les processus naturels
du même nom (Barnier et al., 1999).
Pour un problème d'optimisation donné, un
individu représente un point de l'espace de recherche c.-à-d. une
solution potentielle. On lui associe la valeur du critère à
optimiser qui définit sa performance. Pour progresser d'une population
d'individus à une nouvelle population, on utilise
séquentiellement les processus de sélection, de croisement et de
mutation. La sélection a pour but de favoriser les meilleurs
éléments de la population pour le critère
considéré. Le croisement et la mutation ont pour but d'assurer
l'exploration et l'exploitation de l'espace de recherche. Par
conséquent, les individus les moins adaptés vont être
exclus et les meilleurs vont survire pour construire la nouvelle population.
Chaque itération de l'algorithme génétique
représente une génération. Au fur et à mesure de la
progression d'une génération à l'autre, la solution
trouvée va converger vers la solution optimale à atteindre
(Negnevitsky, 2002).
Généralement, nous pouvons dire qu'un algorithme
génétique dans sa forme générale nécessite
de préciser les points suivants :
- le codage des solutions et la génération d'une
population initiale.
- la fonction de performance pour calculer l'adaptation de chaque
individu de la population.
- le croisement des individus d'une population pour obtenir la
population de la génération suivante.
- l'opération de mutation des individus d'une population
afin d'éviter une convergence prématurée.
- les paramètres de réglage : taille de la
population, probabilités de croisement et de mutation, critère
d'arrêt.
Ces points vont être discutés en détail dans
la suite de ce chapitre, mais nous allons tout d'abord définir les
expressions utilisées dans la théorie des algorithmes
génétiques.
Dans un problème d'optimisation à n
variables, nous faisons correspondre un gène
à chaque variable cherchée. Chaque gène est
représenté par une chaîne de caractères choisis dans
un alphabet fini (souvent binaire). Les gènes s'enchaînent
ensemble "bout à bout" pour
construire un chromosome, chaque
chromosome représentant une solution potentielle sous une forme
codée. Ces chromosomes constituent les briques de base contenant les
caractéristiques héréditaires des individus. Un chromosome
(ou plusieurs) forme un individu qui
représente à son tour une solution potentielle dans l'espace de
recherche correspondant du problème. Etant donné que les AGs
travaillent sur un ensemble de points de l'espace de recherche, nous appelons
l'ensemble des points choisis (à savoir les individus) une
population. Au fur et à mesure des
générations (itérations), une population des
individus mieux adaptés va être créée.
La figure (40) représente les relations entre les
expressions génétiques d'un AG en codage binaire.

Population

0
1
1
1
Gène (1)
Gène (1)
Chromosome
Chromosome
0
0
0
1
0
0
0
1
Individu (Nind)
1
1
Gène (2)
Gène (2)
Individu (1)
1
1
0
0
0
1
0
1
Gène (Ngens)
Gène (Ngens)
0
1
0
1
1
1
1
1
Figure 40. Les niveaux d'organisation des
éléments d'un AG. 3.2.2- Codage et
initialisation.
La première étape de la construction d'un AG est
le choix du type de codage des paramètres du problème. La
façon de coder les solutions potentielles est un facteur
déterminant dans le succès d'un AG. Ainsi, plusieurs types de
codage sont possibles dans la littérature, tels les codages binaires,
Gray, réel,... . Le codage le plus populaire dans la
représentation d'un AG est le codage binaire {0, 1 } ; les solutions
sont codées selon des chaînes de bits de longueur fixe
(Chipperfield et al., 1994). La plupart des théories
liées aux AGs étaient élaborées en se basant sur le
concept de codage binaire proposé par J. Holland et son groupe (Holland,
1975). Les opérateurs de l'AG, croisement et mutation, sont en effet
plus faciles à mettre en oeuvre avec ce type de codage. En outre, le
codage binaire représente la méthode la plus facile et la mieux
adaptée de coder des éléments qu'ils soient réels,
entiers, booléens, ... (Mitchell, 1996). On parle dans ce cas de
génotype en ce qui concerne la représentation binaire
d'un individu et de phénotype pour ce qui est de sa valeur
réelle correspondante dans l'espace de recherche.
Une fois le choix du type de codage déterminé,
une population initiale doit être créée pour le
départ de l'AG. La population initiale a pour but de donner naissance
à des générations successives, mutées et
hybridées à partir de leurs parents. Le choix de la population
initiale influence fortement la rapidité et l'efficacité de l'AG.
Si la position de l'optimum dans l'espace de recherche est totalement inconnue,
il est naturel de générer aléatoirement des individus en
faisant des tirages uniformes dans chacun des domaines associés aux
composantes de l'espace de recherche, en veillant évidemment à ce
que les individus produits respectent les contraintes. Si par contre, des
informations à priori sur le problème sont disponibles,
il parait naturel de générer les individus dans un sous-domaine
particulier afin d'accélérer la convergence. Habituellement,
cette population initiale est générée d'une manière
aléatoire et directement dans sa représentation codée.
Par exemple pour créer une population binaire
de Nind individus dans lesquels chaque chromosome
(individu) est représenté par Ngen
gènes, il suffit simplement d'effectuer Nind ×
Ngen tirages de nombres aléatoires distribués
uniformément sur l'ensemble {0, 1 }, (Chipperfield et al., 1994).
La seconde étape dans la construction de l'AG est le
calcul de la performance (fitness) de chaque individu faisant partie
de la population. Pour ce faire nous devons en premier lieu décoder les
chromosomes (précisément les gènes de chaque chromosome)
en les convertissant en leurs valeurs réelles (numériques)
(Negnevitsky, 2002).
Considérons un problème d'optimisation de
n variables à optimiser, où l'espace de recherche de chaque
variable xj se trouve entre une limite inférieure
xmin,j et une limite supérieure xmax,j :
D = [xmin, j , x max,j]
avec j = 1, 2,..., n. On associe des points du domaine D
à
Sj chaînes de bits (Sj gènes) de
longueur lS. Ainsi, chaque chaîne Sj sera donc
composée de lS
éléments binaires : Sj =
(si)j ; i = 1, 2,..., lS, où si ? {0,1}. Toute
chaîne binaire Sj peut être
décodée en une valeur réelle xj en
utilisant les deux règles suivantes (Negnevitsky, 2002) :
- dans la première, nous convertissons les valeurs
binaires de chaque gène, en valeurs de base décimale selon la
règle suivante :
lS
à ( ) 2 (117)
( )
l i
S -
x j s i j
= ·
?=
i 1
- ensuite, nous calculons les valeurs réelles
correspondantes appartenant à l'espace de recherche donné, par la
règle suivante :
x x
max, min,
j j
-
fd x x x x
( ) à
= = + · lS (118)
j j j
min, -
2 1
Par exemple, supposons que nous cherchons à maximiser
une fonction f en fonction d'une variable réelle x
appartenant à l'espace de recherche D = [-1 , 2]. Soit
S une chaîne binaire représentant une solution possible
avec une longueur lS = 22 :
S = 1,1,0,0,1,0,1,0,0,0,0,1,1,0,1,1,1,1,1,1 ,1,1 }
{
En appliquant les relations (117) et (118), nous obtenons
respectivement la valeur entière de x (en base décimale)
et sa valeur réelle :
l S =22
à 2 1 2 1 2 0 2 1 2 3311359
= ? · = × + × + × + + × =
l i
- 21 20 19 0
S
x si L
i = 1

|
x = -
|
2 ( 1)
- -
1 3311359 22
+ · = ? -
x 1 . 368469 [ 1,2]
2 1
-
|
Après avoir générer la population
initiale, nous devons attribuer à chacun des individus une note qui
correspond à son adaptation au problème. Cette adaptation est la
mesure de la fonction de performance associée à la fonction
objectif du problème. Les notions de ces deux fonctions font l'objet du
paragraphe suivant.
3.2.3- Fonctions objectif et de performance. 3.2.3.1-
Fonction objectif.
A l'inverse des méthodes déterministes
d'optimisation, les algorithmes génétiques ne requièrent
pas d'hypothèse particulière sur la régularité de
la fonction à optimiser (objectif). Ainsi, les algorithmes
génétiques n'utilisent pas les dérivées successives
de la fonction objectif, ce qui rend leurs domaines d'application très
vaste. Aucune hypothèse sur la continuité n'est également
requise. Le peu d'hypothèses requises permet de traiter des
problèmes très complexes. La fonction objectif peut être le
résultat d'une simulation ou d'un modèle mathématique.
Généralement, la fonction objectif, d'un
problème quelconque d'optimisation à K contraintes (dit
problème contraint), peut être formulée comme suit :
Optimisation {Fobj(X) : X?
Dk} (119)
Avec :
? =
k k K
: 1, ,
L
?R R
et H D
: a
k
DK =
?
?? ? ? ?
? b k
?
??
(120)
?
?
??
Fobj(X) : la fonction objectif du
problème.
Hk : la fonction de contrainte.
D : l'ensemble des solutions potentielles du
problème.
Dk : l'espace des solutions réalisables
(c.-à-d. l'ensemble des solutions potentielles en respectant les
contraintes).
La fonction objectif peut être formulée d'un
ensemble de fonctions de dimension n. Elle est donnée d'une
façon générale comme suit : Fobj(X) =
{f1 ,f2,L, f i ,L, fn
}.
Lorsque i = 1 la fonction est dite monoobjectif,
autrement elle est multiobjectif.
Contrairement à l'optimisation monoobjectif, la
solution d'un problème d'optimisation multiobjectif est rarement unique.
Elle est constituée de différentes solutions, représentant
l'ensemble des meilleurs compromis vis-à-vis des
différents objectifs du problème.
Les méthodes existantes pour formuler une fonction
multiobjectif sont diverses. Nous allons expliquer brièvement ces
méthodes qui peuvent être classées en trois grandes
familles (Régnier, 2003) :
1- Les méthodes à
priori. Dans ces méthodes, on définit,
à priori, le compromis désiré entre les objectifs
avant de lancer la méthode de résolution. Nous trouvons dans
cette famille la plupart des méthodes scalaires telles la méthode
de pondération, la méthode des objectifs bornes, la
méthode du critère globale,... . Le principe de ces
méthodes se base sur la transformation du problème multiobjectif
en un problème monoobjectif, en pondérant l'ensemble des
fonctions objectif initiales.
2- Les méthodes
progressives. Dans ces méthodes, on affine le choix
du compromis entre les objectifs au cours de l'optimisation. Contrairement aux
méthodes à priori, ces méthodes ont
l'inconvénient de monopoliser l'attention de l'utilisateur tout au long
du processus d'optimisation. La méthode lexicographique, par exemple,
consiste à minimiser séquentiellement les différents
objectifs du problème. L'ordre de minimisation est fixé en
fonction des résultats séquentiels obtenus. La méthode
progresse alors par transformations successives du problème
d'optimisation.
3- Les méthodes a
posteriori. Dans ces méthodes, il n'est plus
nécessaire de modéliser les préférences entre les
objectifs avant l'optimisation. Ces méthodes se contentent de produire
un ensemble de solutions plutôt qu'un unique compromis. Nous pouvons
ensuite choisir a posteriori une solution du compromis.
3.2.3.2- Fonction de performance.
Chaque chromosome apporte une solution potentielle au
problème à optimiser. Néanmoins, ces solutions n'ont pas
toutes le même degré de pertinence. C'est à la fonction de
performance (fitness) de mesurer cette efficacité pour
permettre à l'AG de faire évoluer la population dans un sens
bénéfique en cherchant la solution meilleure. Autrement dit, la
fonction de performance, fp(X), doit pouvoir attribuer
à chaque individu un indicateur représentant sa pertinence pour
le problème que nous cherchons à résoudre. La performance
sera donc donnée par une fonction à valeurs positives
réelles. La construction d'une fonction de performance appropriée
est très importante pour obtenir un bon fonctionnement de l'AG.
Dans le cas du codage binaire, la fonction de performance doit
affecter une valeur positive au codage binaire correspondant
(phénotype) à chaque chaîne binaire
(génotype). Ainsi, elle permet de déterminer
l'efficacité de la solution présentée par le
génotype pour résoudre le problème.
La fonction de performance fp(X) est
généralement dérivée de la fonction objectif
Fobj(X) du problème. Elle est généralement
donnée par la relation suivante :
fp(X) = g(Fobj(X))
(121)
Où : g : représente la transformation de
la fonction objectif en performance relative.
Les AGs sont naturellement organisés pour
résoudre les problèmes de maximisation (c. -à- d. trouver
les valeurs positives maximales de la fonction objectif). Ainsi, pour les
problèmes de maximisation, la fonction de performance peut être
considérée comme la fonction objectif même. Le but de l'AG
est alors simplement de trouver la chaîne binaire qui maximise la
fonction de performance :
max(fp(X)) = min(Fobj(X))
(122)
Dans le cas de problèmes de minimisation, le
problème doit être modifié de sorte qu'il soit
équivalent à celui de maximisation. Ainsi, il nous faudra
modifier la fonction objectif de telle sorte que la fonction de performance
soit maximale :
max(fp(X)) = -min(Fobj(X))
(123)
max(fp(X)) = 1/min(Fobj(X))
(124)
max(fp(X)) = max(C-
Fobj(X)) ; (C : une grande constante positive)
(125)
Une fois que la performance de chaque individu dans la
population actuelle est évaluée, les mécanismes
évolutionnaires entrent en jeu pour explorer et exploiter le plus
largement possible l'espace de recherche et faire ainsi évoluer la
population de manière progressive. Les opérateurs de l'AG
cherchent à imiter ces mécanismes.
3.2.4- Sélection.
Pour déterminer les individus devant participer au
résultat optimal de l'AG, un opérateur sélection doit
être appliqué. Cet opérateur détermine la
capacité de chaque individu à persister dans la population et
à se reproduire. En règle générale, la
probabilité de survie d'un individu sera directement reliée
à sa performance relative au sein de la population. Cela traduit bien
l'idée de la sélection naturelle Darwiniste : les gènes
les plus performants ont la probabilité la plus élevée de
se reproduire dans la population, tandis que ceux qui ont une performance
relative plus faible auront tendance à disparaître.
Néanmoins, cette approche doit être appréhendée avec
précaution, puisqu'on souhaite transférer aux
générations suivantes les meilleures caractéristiques
génétiques et pas seulement les meilleurs individus.
En effet, un individu peut avoir certains gènes
présents dans la solution optimale tout en présentant une
performance médiocre : son élimination serait donc nuisible.
Cependant, les individus ayant une bonne performance sont toujours plus
susceptibles de posséder les bons gènes. Ainsi, une
caractéristique importante d'un opérateur de sélection
peut être définie en termes de pression sélective
exercée sur la population. Cette notion doit être prise en compte
d'une manière équilibrée. Si la pression sélective
est trop forte, cela revient à "écraser" toute forme de
diversité possible et la convergence de l'algorithme risque d'être
prématurée en conduisant vers un optimum local. Si l'on passe
à l'autre extrême, une pression sélective trop faible,
l'algorithme tend à se rapprocher d'une simple recherche
aléatoire avec une progression lente de la population (Duvigneau,
2006).
Il existe plusieurs méthodes pour représenter la
sélection. La méthode la plus couramment utilisée
proposée par Goldberg (Goldberg, 1989) est connue sous le nom de
sélection par roulette biaisée (Roulette Wheel). D'autres
méthodes de sélection sont aussi apparues dans la
littérature, la plus connue étant celle du tournoi (Tournament
Selection).
3.2.4.1- Sélection par la roulette
biaisée.
Dans cette méthode, chaque chromosome est copié
dans la nouvelle population avec une probabilité proportionnelle
à sa performance relative : on parle ainsi de sélection
proportionnelle à la performance. Dans un codage binaire, le principe de
cette méthode consiste à associer à chaque individu
Xi (d'une population de taille Nind) une
probabilité Rp,i proportionnelle à sa performance
fp(Xi). Cette probabilité (dite la fonction de performance
normalisée) peut être ainsi calculée comme le
taux de la performance du ième individu
pondéré par la somme des performances de toute la population :
R P , i
fp ( ) (126)
Nind
?=
i 1
X i
fp ( )
X i
On doit donc effectuer autant de tirages aléatoires
qu'il y a d'individus dans la population. Chaque individu est alors reproduit
avec la probabilité Rp ; certains individus
(notés les bons) auront plus de chance d'être reproduits, les
autres (notés mauvais) seront éliminés.
Dans la pratique, nous associons à chaque individu un
secteur (ou un segment) dont la surface (la longueur) est proportionnelle
à sa performance. Ces éléments sont ensuite
concaténés sur une base normalisée entre 0 et 1. Enfin,
nous reproduisons le principe de tirage aléatoire utilisé dans
les roulettes de casinos, d'où le nom de ce mécanisme de
sélection, avec une caractéristique linéaire
(sélection proportionnelle à la performance). Nous tirons alors
un nombre aléatoire, de distribution uniforme entre 0 et 1, et nous
déterminons l'individu sélectionné. Ainsi, les grands
secteurs (c.-à-d. les bons individus) auront plus de chance d'être
choisis que les petits secteurs. Les individus ayant une forte performance sont
donc privilégiés au détriment des individus moins forts,
tout en gardant la notion de tirage aléatoire. Ainsi, avec cette
méthode un même individu pourra être
sélectionné plusieurs fois. Mais une certaine diversité
est cependant maintenue, car même les individus les moins performants
conservent une chance d'être choisis. Pour garder la même taille de
la population initiale dans la population suivante, on doit lancer la roulette
autant de fois qu'il y a d'individus de la population.
Considérons un problème simple de maximisation dont
la fonction objectif est donnée par la forme suivante :
Fobj = 4· x · (1- x)
L'espace de recherche de la variable x est D = [0,1].
Nous traitons ce problème en décodant les points
de l'espace de recherche en chaînes binaires de longueur lS = 8,
et en initialisant une population de départ de 4 individus
(Nind = 4).
Pour appliquer la méthode de la roulette biaisée,
nous calculons en premier lieu, pour chaque individu, la fonction de
performance fp(Xi) et la probabilité correspondante
Rp,i.
Le tableau suivant résume le résultat pour chaque
élément :
|
N°
individu
|
Chromosome
Si
|
Valeurs
décodées Xi
(individus)
|
Performance
fp(Xi) =Fobj
=
4·x·(1-x)
|
Probabilité
Rp,i
= fp(Xi) / ?(
fp(Xi))
|
Intervalles
de
probabilité
|
|
1
|
1
|
0 1
|
1 1
|
0 1
|
0
|
0.7294
|
0.7895
|
0.29
|
[0 , 0.29]
|
|
2
|
1
|
1 0
|
1 1
|
1 1
|
0
|
0.8706
|
0.4507
|
0.18
|
[0.29 ,
|
0.47]
|
|
3
|
0
|
0 0
|
1 1
|
0 1
|
0
|
0.1020
|
0.3665
|
0.15
|
[0.47 ,
|
0.62]
|
|
4
|
0
|
1 1
|
0 1
|
1 0
|
0
|
0.423 5
|
0.9766
|
0.38
|
[0.62
|
, 1]
|
|
|
|
|
|
|
|
? fp = 2.5831
|
|
|
|
Tableau 1. Résultats de
l'évaluation des individus dans la population initiale.
Ensuite, nous associons à chaque intervalle de
probabilité un secteur équivalent de la roulette (c.-à-d.
un individu), comme le montre la figure (41) :
0.29
Rp1 Rp2
0.47
0
1
Rp3
Rp4
0.62
Figure 41. Sélection par roulette
biaisée.
Enfin, nous effectuons le tirage d'un nombre aléatoire
dans l'intervalle [0,1] et nous reproduisons ce tirage 4 fois. Nous
sélectionnons ainsi les individus en positionnant chaque nombre obtenu
par tirage dans le secteur équivalent de la roulette. Le tableau (2)
donne la valeur obtenue pour chaque tirage et les individus
sélectionnés correspondants.
|
N°
tirage
|
Valeur obtenue
|
Individus
sélectionnés
|
|
Chromosomes
équivalents
|
|
|
1
|
0.43
|
X2
|
Xá 1
|
=
|
1
|
1 0
|
1 1
|
1 1
|
0
|
|
2
|
0.89
|
X4
|
Xá 2
|
=
|
0
|
1 1
|
0 1
|
1 0
|
0
|
|
3
|
0.18
|
X1
|
Xá 3
|
=
|
1
|
0 1
|
1 1
|
0 1
|
0
|
|
4
|
0.75
|
X4
|
Xá 4
|
=
|
0
|
1 1
|
0 1
|
1 0
|
0
|
Tableau 2. Résultat de
sélection.
Nous trouvons que l'individu X3 est
éliminé de la population tandis que l'individu X4 est
reproduit deux fois.
3.2.4.2- Sélection par tournoi.
La méthode de la roulette, comme les autres
méthodes de sélection proportionnelle à la performance,
exige principalement deux étapes pour créer la population
intermédiaire. Premièrement, nous calculons la performance
moyenne de la population, ensuite nous calculons la probabilité de
sélection pour chaque individu. La méthode du tournoi est plus
directe, puisqu'elle ne demande pas le calcul de la performance moyenne de la
population (Mitchell, 1996).
Cette méthode consiste à simuler
Nind tournois, un individu étant
sélectionné à chaque fois. Un échantillon de
np individus (2 minimum) est prélevé au
hasard à chaque tournoi. Le
participant dans l'échantillon ayant la performance la
plus élevée sera alors adopté pour accéder à
la population intermédiaire. Etant donné que le choix des
échantillons des individus se fait aléatoirement, il est donc
tout à fait possible que certains individus participent à
plusieurs tournois. Il est aussi possible qu'un de ces individus gagne
plusieurs fois et il sera par conséquent copié autant de fois
dans la population intermédiaire. La pression sélective de cette
méthode est directement reliée à la taille de
l'échantillon (np). Plus la taille
np est grande, plus la pression est grande (Duvigneau,
2006). Cette méthode est caractérisée par une pression
sélective plus forte que celle de la méthode de la roulette
biaisée : pour qu'un individu peu performant puisse être
sélectionné, il faut que tous ses adversaires soient moins bons
que lui. Ainsi, cette méthode doit être privilégiée
dans le cas d'une population de grande taille.
Dans le cas où le nombre de participants dans chaque
tournoi est égal à deux (np = 2), la
sélection est dite par « tournoi binaire ». La
sélection d'un individu Xsélect,K par tournoi
binaire peut être faite de la façon suivante :
|
XsélectK
,
|
=
|
? ??
??
|
X Si fp X
( ) >
i i
X Sinon
j
|
fp X
( )
j
|
(127)
|
Où, K={1,2,L,Nind}.
i, j sont des nombres aléatoires
non-égaux, i, j ? {1,2,L, Nin d }.
3.2.4.3- Conclusion.
La méthode de la roulette reste la méthode de
sélection la plus utilisée car elle est relativement efficace.
Cependant, pour certains problèmes, elle est "un peu trop
aléatoire". C'est pour cela que pour certains problèmes, la
méthode du tournoi est plus préférée. Cette
dernière étant "moins aléatoire" que la roulette, elle
permet ainsi une plus grande fiabilité.
Disposant finalement d'une population d'individus
non-homogène, la diversité de la population doit être
entretenue au cours des générations afin de parcourir le plus
largement possible l'espace de recherche. Pour ce faire, les individus
sélectionnés (dits les parents) sont alors introduits dans le
bassin de reproduction (Mating Pool) où ils seront de nouveaux choisis
aléatoirement pour voir leurs chromosomes subir des transformations par
les opérateurs génétiques. Ces derniers sont les
opérateurs de croisement et de mutation (dits les opérateurs de
diversification et d'intensification du milieu).
3.2.5- Croisement.
Dans les AGs, le croisement est considéré comme
le principal opérateur pour produire des nouveaux chromosomes. Comme son
homologue dans la nature, le croisement produit de nouveaux individus en leur
transférant quelques parties de la matière
génétique de leurs parents. L'objectif du croisement est donc
d'enrichir la diversité de la population en manipulant la structure des
chromosomes (Chipperfield et al., 1994). Initialement, le croisement
associé au codage par chaînes de bits (codage binaire) est le
croisement à découpage de chromosomes.
Ainsi, dans le codage binaire, les individus, qui
résultent de la sélection, sont groupés de manière
aléatoire par paire définissant ainsi les parents. Ensuite,
chaque couple peut subir un croisement avec une probabilité
Pc donnée. Cette étape peut être
effectuée comme suit
Pour chaque couple, un nombre aléatoire P est
tiré dans l'intervalle [0,1] et comparé ensuite avec la
probabilité de croisement Pc :
- si P > Pc, le couple ne subit
pas de croissement et un clonage de chromosome aura
lieu. Les deux enfants produits sont ainsi une copie exacte de
leurs parents.
- si P < Pc, le croisement a
lieu et un échange des parties des chromosomes des parents
va produire deux enfants par couple de parents.
Après avoir tiré les couples qui vont être
"croisés", l'opérateur de croisement peut donc être
appliqué. Plusieurs types de croisement sont présentés
dans la littérature, tels : le croisement seul point, le croisement
multipoints, le croisement uniforme,... .
3.2.5.1- Croisement seul point.
Dans ce type de croisement, un point de croisement est choisi
aléatoirement pour le couple ; la position de ce point M est
définie par:
M? {1,2,L,l S -1} (128)
lS : la longueur de chromosome (nombre de bits dans le
chromosome).
Les deux parents seront ainsi divisés en deux segments
; tête et queue. Le segment tête du premier parent est
combiné avec le segment queue du deuxième parent : on obtient
ainsi le premier enfant. La combinaison entre le segment tête de
deuxième parent et le segment queue de premier parent produit le
deuxième enfant.
Pour mieux expliciter ce type de croisement, nous allons
l'appliquer à l'exemple présenté dans le paragraphe de la
sélection.
Considérons la population de quatre individus
déterminée par l'opération de sélection, nous
pouvons la diviser aléatoirement en deux couples qui peuvent être
par exemple : [(Xá1, Xá4), (Xá2,
Xá3)].
Considérons ensuite une probabilité de
croisement Pc = 50% (nous avons choisi une faible
probabilité de croisement étant donné la "petite" taille
de la population considérée). Cela signifie que nous pouvons
tirer seulement un seul couple au hasard et lui appliquer le croisement
chromosomique. Supposons que le hasard ait désigné le
deuxième couple (Xá2, Xá3) pour croisement, il
nous faut maintenant déterminer la position du point M de
croisement dans les parents. Cette position peut être tirée au
hasard ou choisie préalablement. Afin de rendre l'exemple plus parlant,
nous décidons d'appliquer ce croisement sur le milieu (M = 4)
du chromosome, comme le montre la figure (42).
Ainsi, l'application de l'opération de croisement engendre
deux nouveaux individus (les deux enfants Xâ 2 et
Xâ 3).
Le croisement en un seul point a l'avantage d'être
simple et facile à appliquer. De plus, ce type de croisement donne de
bons résultats dans des applications où certaines informations
importantes sur le problème sont déjà connues. Enfin, pour
des problèmes d'optimisation en temps réel ou des
problèmes ayant un grand nombre de variables, cette méthode peut
donner une convergence rapide vers une solution optimale.
Avant Après
Croissement Croissement
0
1
Parent Xá 2
Parent Xá 3
0
1
1
1
0
1
1
1
0
1
0
1
0
0
Enfant Xâ 2
0
1
1
0
1
0
1
0
Enfant Xâ 3
1
0
1
1
1
1
0
0

Figure 42. Croisement seul point.
3.2.5.2- Croisement multipoints.
A la différence du croisement seul point, ce type de
croisement s'applique en plusieurs points (m points) et chaque
chromosome sera ainsi découpé en (m+ 1) segments. La
position de chaque point, Mi, se détermine
aléatoirement, avec :
Mi { l S } i m
? L - = L
1,2, , 1 ; 1,2, ,(129)
lS : la longueur de chromosome.
m : le nombre de points de croisement donné (Pour
m = 1, on retourne au cas du croisement seul point).
Ensuite, les bits entre deux points de croisement successifs
du premier parent vont être échangés avec les bits
correspondants du deuxième parent. La figure (43) montre un croisement
en cinq points (m = 5), les points de croisement Mi
étant {2, 5, 9, 11, 13 } :
M1 = 2 M2 = 5 M3 = 9 M4 = 11 M5 = 13
1110111
0
0
1
1
1
0
1
Enfant 1
1
01000001 1 0 0 0 0
Enfant 2
1 0 1 0 1 0 0 01 1 1 0 01
1 1 1 0 0 1 1 0 0 1 0 1 00
Parent 2
Parent 1
Figure 43. Croisement multipoints (m =
5).
La nature complexe du croisement multipoints permet d'obtenir
une bonne exploration de l'espace de recherche au détriment d'une
convergence rapide vers la bonne solution comme le ferait la première
méthode. Ainsi, cette méthode de croisement est beaucoup plus
robuste.
3.2.5.3- Croisement uniforme.
Dans le croisement multipoints, chaque segment du chromosome,
compris entre deux points de croisement successifs, peut contenir un ou
plusieurs bits. Le croisement uniforme généralise ce
schéma pour lier à chaque bit un point de croisement. Pour ce
faire, un chromosome masque, de même longueur que le chromosome des
parents, est créé : la valeur de ses bits étant
aléatoire. La parité de chaque bit dans le masque
détermine successivement le parent qui va donner ses bits à
l'enfant (Chipperfield et al., 1994). L'enfant
généré va copier le bit de son premier parent si le bit
correspondant de masque est `1', ou de son deuxième parent si le bit
correspondant de masque est `0'. Ce schéma ne fait générer
qu'un seul enfant. Pour générer le deuxième, un autre
chromosome masque est nécessaire. Les bits de ce dernier sont
créés par complémentation des bits du premier masque.
L'explication de cette méthode est décrite par l'exemple suivant
:

0
1
0
1
1
0
1
Parent 1
Enfant 1

1
1
1
1
1
1
0
0
0
1
0
1
1

0
1
1
1
Masque 1
Masque 2
|
1
|
0
|
1
|
0
|
1
|
1
|
0
|
0
|
1
|
0
|
0
|
1
|
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
Parent 2 Enfant 2
Figure 44. Croisement uniforme.
La nature complexe du croisement uniforme, comme pour le
croisement multipoints, améliore encore l'exploration de l'espace de
recherche. Avec le croisement uniforme, basé sur le transfert de
matière génétique d'un parent à un enfant par bit
de chromosome, on obtient un algorithme génétique beaucoup moins
dépendant du schéma de codage. Enfin, cette méthode peut
être plus précise dans l'identification d'optima globaux.
3.2.6- Mutation.
A la suite des opérateurs de sélection et de
croisement, on mime à nouveau un phénomène biologique,
celui de la mutation. Au niveau biologique, une mutation est une modification
de l'information génétique par dégradation ou substitution
locale de paire de base : ceci permet de produire une nouvelle structure
génétique. L'opérateur de mutation dans le cas des AGs
possède la propriété d'ergodicité du parcours de
l'espace de recherche : cette propriété indique que l'AG sera
susceptible d'atteindre tous les points de l'espace, sans pour autant les
parcourir tous dans le processus de résolution
(Bontemps, 1995). La séquence des opérations de sélection
et de croisement peut mener l'AG à "stagner" dans un ensemble de
solutions identiques. Dans de telles conditions, tous les chromosomes
deviennent identiques et, ainsi, la performance moyenne de la population ne
s'améliore plus. Dans ce cas, la mutation aide l'AG à
éviter la perte de diversité génétique et, par
conséquent, elle garantit que l'AG ne va pas être bloqué
dans un optimum local (Negnevitsky, 2002).
Le principe de la mutation consiste à modifier, avec
une probabilité Pm faible, certains bits des
chromosomes. Nous tirons tout d'abord pour chaque bit un nombre
aléatoire P dans l'intervalle [0,1]. Puis, nous le comparons
avec une probabilité de mutation Pm donnée
:
- si P > Pm, le bit ne subira pas
aucune modification.
- si P < Pm, la mutation est
appliquée au bit correspondant.
Ainsi, le bit choisi pour muter sera remplacé par une
valeur aléatoire, souvent proche de la valeur initiale. Dans le cas du
codage binaire, cette mutation s'effectue simplement en remplaçant le
bit `0' par `1' et vice versa.
Pour continuer la présentation de l'opérateur de
mutation, nous reprenons l'exemple précédent (paragraphe
croisement) et nous appliquons la mutation sur la population résultante
du croisement.
Rappelons les individus résultants :
Xâ 1 = 1 1 0 1 1 1 1 0
Xâ 2 = 0 1 1 0 1 0 1 0
Xâ 3 = 1 0 1 1 1 1 0 0
Xâ 4 = 0 1 1 0 1 1 0 0
Nous proposons arbitrairement une probabilité de
mutation Pm = 0.01. Pour déterminer les bits qui
subiront une mutation, nous tirons un nombre aléatoire compris entre 0
et 1 pour chaque bit et nous le comparons avec Pm. La
figure suivante montre les bits choisis pour la mutation et l'application de
cet opérateur :
Xfl 3

0
1
1
0
1
1
0
0
Xfl 4
Xã 3

0
1
1
0
1
1
0
0
Xã 4


0
1
1
1
1
1
1
0
0
1
1
1
1
1
0
1
0
1

1
0
Xfl 1
1
0
0
1
1
0
1
0
Xã 1
0
0
1
0
1
1
1
0

1
1
1
0
1
1
0
0
1
Xfl 2
1
0
1
1
1
1
1
0
Xã 2
Figure 45. Exemple de mutation.
Les individus résultants de la mutation,
(Xã1, Xã2,
Xã3, Xã4), vont former la
nouvelle population qui va remplacer la population initiale pour la
deuxième génération.
3.2.7- Création de la génération
suivante et critères d'arrêt.
Pour réaliser une boucle d'une itération de
l'AG, ce dernier doit d'abord regrouper les individus survivants après
mutation dans une nouvelle population. Ensuite, l'AG va calculer la performance
pour chaque nouvel individu. Enfin, si un critère d'arrêt de
l'algorithme n'est pas encore atteint, la nouvelle population doit alors
remplacer la population actuelle et une nouvelle boucle sera ainsi
lancée.
Puisque les AGs sont des méthodes de recherches
stochastiques, il est difficile de spécifier de façon rigoureuse
des critères de convergence. Par exemple, la performance d'une
population peut rester stable pour un certain nombre de
générations avant qu'un individu supérieur puisse
apparaître. Ainsi, l'application d'un critère d'arrêt
devient une vraie problématique. Une pratique commune est
d'arrêter l'AG après certain nombre de générations
et d'examiner ensuite la qualité de la solution trouvée par
rapport à la définition du problème. Un nombre typique de
générations peut aller de 50 jusqu'à 500
générations (Negnevitsky, 2002).
Par ailleurs, d'autres critères peuvent être
appliqués pour déterminer l'arrêt de l'AG tels que :
- l'amélioration de la solution ne dépasse plus un
certain seuil
- la fonction objectif du problème atteint une valeur
donnée
- le temps de calcul atteint une valeur
prédéterminée.
Nous terminons l'exemple que nous avons commencé de
traiter par le calcul de la performance de chaque nouvel individu :
|
N°
individu
|
Chromosome
Sãi
|
Valeurs
décodées
Xãi
|
Performance fp(Xãi)
=Fobj
|
|
1
|
0
|
1 1
|
1
|
1 1
|
1
|
0
|
0.4941
|
0.9999
|
|
2
|
0
|
0 1
|
0
|
1 1
|
1
|
0
|
0.1804
|
0.5914
|
|
3
|
1
|
0 1
|
1
|
1 1
|
1
|
0
|
0.745 1
|
0.7597
|
|
4
|
0
|
1 1
|
0
|
1 1
|
0
|
0
|
0.4235
|
0.9766
|
|
|
|
|
|
|
|
|
? fp = 3.3276
|
Tableau 3. Résultats de
l'évaluation des individus dans la nouvelle population.
En comparant le tableau (1) de l'évaluation de la
population initiale et le tableau (3) de
l'évaluation de la nouvelle population, nous pouvons tirer
les remarques suivantes :
- le meilleur individu (Xãj)
dans la nouvelle population est un individu nouveau (issu
d'une opération de mutation).
- ce nouvel individu présente une performance
supérieure à celle du meilleur individu de la population initiale
(fp(Xãj) = 0.9999 contre
fp(Xj) = 0.9766).
- l'individu X4 reste toujours présent dans la
nouvelle population (renommé Xã4).
- la nouvelle performance totale (et donc la performance moyenne)
est supérieures à la valeur de départ (?
fp(Xãi) = 3.3276 contre
? fp(Xi) = 2.5831).
- l'individu (Xã1),
associé à la performance maximale
fp(Xã1), peut être ainsi
considéré comme la solution optimale du problème.
Etant donné que le problème traité est
très simple, l'AG a pu atteindre une solution optimale dés la
première itération.
3.2.8- Compromis exploration et exploitation.
Généralement, la recherche d'une solution
optimale dans un espace complexe implique souvent un compromis entre deux
objectifs apparent contradictoires : l'exploration et l'exploitation.
L'exploration a pour objectif une recherche large des
régions nouvelles et inconnues de l'espace de recherche en
récoltant de l'information sur le problème à optimiser.
L'exploitation se propose d'utiliser l'information acquise aux points
déjà explorés pour définir et parcourir ainsi les
zones les plus intéressantes de l'espace de recherche. Une recherche
purement aléatoire (comme le fait la méthode de Monte-Carlo) est
bonne pour l'exploration mais mauvaise pour l'exploitation alors que la
recherche dans le voisinage (comme le fait la méthode de la descente)
est une bonne méthode d'exploitation mais une mauvaise méthode
d'exploration. La littérature montre que les algorithmes
génétiques peuvent réaliser un compromis
équilibré et raisonnable entre exploration et exploitation. Mais
il est important de bien doser l'usage de ces deux ingrédients afin que
l'exploration puisse identifier rapidement des régions de l'espace de
recherche qui contiennent des solutions de bonnes qualités, sans perdre
trop de temps à exploiter des régions moins prometteuses. Pour ce
faire, il faut ainsi ajuster les paramètres de réglage des
opérateurs génétiques, sachant que le croisement favorise
plus l'exploration tandis que la mutation favorise plus l'exploitation.
3.2.9- Paramètres de réglage de
l'AG.
Il y a principalement trois paramètres de base pour le
"fonctionnement" d'un AG : - le nombre d'individus dans la population
Nind (dit la taille de la population).
- la probabilité de croisement Pc.
- la probabilité de mutation Pm.
La réussite et la rapidité d'un AG
dépendent fortement des valeurs choisies pour ces paramètres. Le
bon réglage de ces paramètres est un problème parfois
délicat (Mitchell, 1996).
Nous discutons ci-dessous l'influence de chaque paramètre
et la gamme de valeurs qu'il peut prendre :
1- la taille de la population
Nind
Ce paramètre doit être judicieusement
réglé en fonction de la taille du problème.
Généralement, nous pouvons dire que si la taille de la population
est :
- trop faible, l'AG peut converger trop rapidement vers de
mauvaises solutions. - trop grande, le temps de calcul de l'AG peut
s'avérer très important.
En règle générale, plus la taille de la
population est grande, plus le nombre de solutions potentielles
évaluées est élevé. La littérature montre
que les meilleures valeurs de taille de population sont comprises entre 50 et
100 individus (Mitchell, 1996).
2- la probabilité de croisement
Pc
Comme nous l'avons dit, la probabilité de croisement
joue un rôle très important dans l'exploration de l'espace de
recherche du problème. En générale, plus la
probabilité de croisement est élevée, plus il y aura de
nouvelles structures apparaissant dans la nouvelle population. Ainsi, si la
probabilité de croisement est :
- trop élevée, les "bonnes" structures
apportées par la sélection risquent d'être détruites
trop vite.
- trop faible, la recherche de la solution optimale risque de
stagner.
Le taux habituel de la probabilité de croisement est
choisi entre 0.7 et 0.95.
3- la probabilité de mutation
Pm
La mutation, comme nous l'avons vu, est un opérateur
secondaire, mais elle reste très importante pour l'AG. Elle a pour
objectifs l'introduction de diversité dans la population et la meilleure
exploitation de l'espace de recherche. Ainsi, si la probabilité de
mutation est :
- trop élevé, la mutation rend la recherche
très aléatoire.
- trop faible, la recherche risque de stagner.
Le taux habituel de la probabilité de mutation est choisi
entre 0.001 et 0.05. 3.3- Conclusion.
Les algorithmes génétiques sont des
méthodes métaheuristiques d'optimisation globale basées
sur des concepts de génétique et de sélection naturelle.
Le composant principal des AGs est le gène qui se compose d'une
chaîne de caractères (souvent binaire). Les gènes
s'enchaînent et forment les chromosomes. Ces derniers forment les
individus dans l'espace de recherche. Ainsi, les AGs travaillent sur une
population d'individus, où chacun de ces derniers représente une
solution possible pour le problème donné. Dans chaque
itération de l'AG, la performance de chaque individu de la population
courante est calculée. Les opérateurs de
génétiques, sélection, croisement et mutation, sont
appliqués successivement pour créer une nouvelle population
jusqu'à l'approche rigoureuse de la solution optimale.
Les algorithmes génétiques offrent plusieurs
avantages :
- Ils ne demandent pas d'informations à priori ou
des propriétés particulières de la fonction objectif du
problème.
- Leurs performances par rapport aux algorithmes classiques sont
bien remarquées lorsque par exemple les espaces de recherches sont
importants.
- Outre leur facilité de programmation et de manipulation,
ils sont facilement adaptables à tout type de problème
d'optimisation.
- Ils peuvent être utilisés avec profit pour traiter
des problèmes n'étant pas optimisables efficacement par des
approches purement mathématiquement.
Par ailleurs, les algorithmes génétiques
présentent certaines limites :
- Le temps de calcul est souvent important : ils
nécessitent de nombreux calculs, en particulier au niveau de la fonction
objectif.
- Les paramètres de réglage (telles la taille de
la population, la probabilité de croisement, ...) sont parfois
difficiles à déterminer. Or le succès de
l'évolution en dépend et plusieurs essais sont donc
nécessaires.
- Ils ne garantissent pas toujours la découverte de
l'optimum global en un temps fini. En effet, lorsqu'une population
évolue, il se peut que certains individus occupant à un instant
une place importante au sein de cette population deviennent majoritaires. A ce
moment, il se peut que la population converge vers cet individu en
s'écartant ainsi d'individus plus intéressants et en
s'éloignant de l'individu vers lequel on devrait converger.
Nous pouvons conclure que l'efficacité des AGs
dépend d'un compromis entre deux objectifs contradictoires : la
rapidité et la précision. La rapidité est souvent
mesurée en nombre d'évaluations de la fonction objectif. Cette
dernière représente la plupart du temps la partie la plus
"gourmande" en temps de calcul. La précision se rapporte à la
distance entre l'optimum trouvé par l'AG et l'optimum réel, du
point de vue de la solution ou de la valeur. Bien souvent, un AG rapide est peu
précis, et inversement.
Dans le chapitre suivant, nous utilisons les principales
caractéristiques des AGs développés dans ce chapitre pour
une optimisation globale des PSSs.
Chapitre IV
Application
4.1- Introduction.
Nous avons jusqu'à présent
développé le modèle nécessaire du système de
puissance, présenté la théorie de la stabilité aux
petites perturbations avec régulateurs PSSs ainsi que les AGs.
L'objectif de ce chapitre est de trouver la meilleure localisation possible des
PSSs, avec des paramètres optimaux, tout en réduisant le nombre
de PSSs. Cela assurera un amortissement satisfaisant aux oscillations
rotoriques des modes locaux et interrégionaux et garantira la
stabilité globale du système pour différents points de
fonctionnement.
Lors de l'installation des PSSs dans les réseaux
multimachines, la première étape conventionnelle à mettre
en oeuvre concerne la détermination des meilleurs emplacements des PSSs
au sein du réseau.
Le nombre de stabilisateurs à installer n'est pas
toujours égal au nombre de générateurs. Par
conséquent, il faut prendre en considération le choix de
l'emplacement optimal des stabilisateurs qui offre un meilleur
amortissement.
Pour amortir les modes locaux, le choix de l'emplacement reste
facile car le nombre de générateurs impliqués
principalement dans les oscillations locales est très faible. Par
contre, pour les modes globaux, un grand nombre de générateurs
sont généralement associées aux oscillations. Cela
complique le choix de l'emplacement des PSSs (Zhou et al., 1991). En
outre, une mauvaise localisation d'un PSS peut entraîner une
amplification des oscillations, voire contribuer à la perte de
stabilité du système. Ainsi, le problème du choix de
l'emplacement des PSSs est très critique et il faut le traiter
judicieusement.
Quand un PSS est inséré dans le système,
il affectera tous les modes électromécaniques d'oscillations.
Ainsi, les interactions entre les PSSs doivent être
considérées lorsque plusieurs PSSs sont insérés
(Zhang et al., 2000).
Tout PSS devrait être réglé pour fournir
l'amortissement suffisant de tous les modes électromécaniques car
l'amortissement de chaque mode est un effet cumulatif des contributions de
chaque PSS. En outre, le réglage des PSSs doit être robuste : les
PSSs doivent être efficaces non seulement lors de la variation des
conditions de fonctionnement mais aussi lors du changement de la topologie du
réseau.
Ce chapitre s'articule autour de l'application de notre approche
au sein d'un système de puissance multimachines.
Dans la première partie, nous allons présenter les
caractéristiques du réseau étudié (le réseau
interconnecté New England/New York : 16 générateurs et 68
noeuds).
Ensuite, nous expliquons les différents critères de
performance du système pour le modèle linéaire et
non-linéaire.
Le problème d'assurer une meilleure localisation des
PSSs et une meilleure coordination de leurs paramètres est
formulé en tant que problème d'optimisation multiobjectif et
résolu à l'aide d'un programme d'AG. La fonction multiobjectif
utilisée est formulée pour optimiser un ensemble de deux
fonctions objectif basées sur l'analyse des valeurs propres du
système (partie réelle de la valeur propre et facteur
d'amortissement). La mise en oeuvre de cette approche fera l'objet de la
troisième partie du chapitre.
La dernière partie du chapitre concerne l'application de
l'approche proposée et la discussion des résultats obtenus.
4.2- Réseau étudié.
4.2.1- Caractéristiques du réseau
étudié.
Le système de puissance choisi dans notre étude
est le réseau réduit équivalent au réseau
interconnecté de New England et New York (Rogers, 2000). Ce
système, composé de cinq régions, possède des
propriétés intéressantes de par la complexité des
interactions des différentes régions qui le composent. Il se
compose de 16 générateurs (numérotés de 53 à
68) et de 68 noeuds. Les neuf premiers générateurs
représentent le système de génération de New
England. Les générateurs de 62 à 65 représentent le
système de New York. Chacun des trois derniers générateurs
forme un seul groupe ; ils représentent les systèmes
équivalents aux trois grandes régions voisines
interconnectées au système de New York.
La représentation unifilaire du système et une
représentation géographique et schématique de
l'interconnexion des cinq régions sont respectivement données aux
figures (46) et (47). Huit lignes d'interconnexion relient les cinq
régions du système : ce sont les lignes entre les jeux de barre
(1#2), (1#27), (1#47), (8#9), (42#41), (46#49), (52#42) et (50#51). La
puissance est transférée de la deuxième région aux
première, troisième et cinquième régions. La
puissance est aussi transférée de la cinquième
région à la quatrième et de cette dernière à
la troisième. Les puissances active et réactive transitées
dans ce réseau, pour le point de fonctionnement nominal, sont d'environ
20 GW et 3 GVAr. Cela représente quasiment, en ordre de grandeur, un
quart que le système de puissance français.
Les valeurs numériques du réseau peuvent être
trouvées dans la référence (Rogers, 2000) ; elles sont
rappelées en annexe C.
4.2.2- Caractérisations d'un
défaut.
Dans les réseaux haute tension, les types de
défauts les plus fréquents sont les courts- circuits. Ces
derniers dépendent de différents facteurs tels leurs
emplacements, leurs durées, leurs types (une phase- terre, deux
phases,...), le système de prise de terre,... .
Bien que les courts-circuits triphasés -les
défauts symétriques- soient rares, l'analyse de ce type de
défauts est nécessaire, car ils mènent
généralement aux courants de défauts les plus
sévères. Ils sont donc souvent les plus utilisés en
simulation dynamique pour tester la stabilité des systèmes de
puissance et la robustesse de régulation.
Lorsque les protections détectent une apparition de
courants élevés sur une ligne (ou une diminution de
l'impédance vue des extrémités de la ligne), elles
"envoient" aux disjoncteurs concernés un ordre d'ouverture afin d'isoler
la ligne en question et éviter la propagation du phénomène
sur le réseau. La disparition du court-circuit doit se faire rapidement,
en moins de trois périodes du réseau (50 millisecondes pour une
fréquence de 60 Hz). Ensuit, les dispositifs de réenclenchement
automatique de la ligne sont responsables de remettre la ligne en service
(Meyer et al., 1998). Ainsi, la simulation du défaut de
court-circuit sur une ligne de transmission et la simulation du comportement
des systèmes de protection s'effectue lors de :
- l'apparition du défaut
- l'ouverture et du réenclenchement automatique des
disjoncteurs.
Dans notre étude, cela implique de calculer la matrice
admittance du réseau de transport pour les trois phases suivantes :
avant le défaut, pendant le défaut et après le
défaut, en considérant que le défaut triphasé est
caractérisé par une impédance infiniment petite
(Zf = 0 + j10-7 dans notre simulation), (Tolba,
2005).
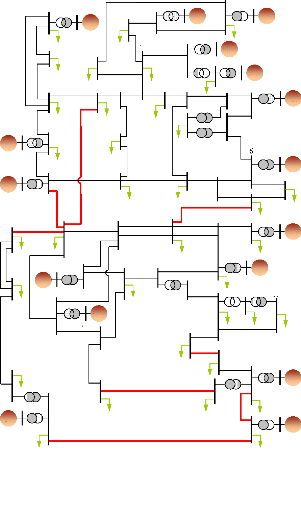
29
59
61
23
58
22
21
G6
G7
52
40
68
G9
19
56
G4
28
24
16
57
20
G5
27 17
15 14 13 10
55
26
G3
60
25
18
12 11
G8
54
53 2
G1
3
4
7
5
G2
8
36 37 65
9
1
30
47
G13
63
32
64
G12
33 34
48
G11
45 44 39
31
35
G10
62
51
50
38
G16
46
41
66
67
49
42
G15
G14
Figure 46. Représentation
unifilaire du réseau étudié
(Réseau New
England/New York : 16 générateurs, 68 noeuds).
105
47
2
Région
3
41
1
27
42
49
9
New
York
8
Région
4
Région
2
New
England
Région
1
46
52
50
Région
5
51
ISO
IESO
New York
ISO
PJM
MW*
Hydro
Quebec New
England
Figure 47. Représentation
géographique et schématique des cinq régions du
système étudié. 4.3- Analyse de la
performance et critères de bonne régulation.
Pour faire une étude analytique complète des
problèmes d'oscillations des systèmes de puissance, il est
nécessaire d'établir des procédures d'analyse du
problème et de préciser les critères de performance du
système. Les outils d'analyse des oscillations du système doivent
déterminer les problèmes existants ; ils doivent être
capables en outre d'identifier les éléments déterminants
et de fournir des informations utiles pour la conception et le réglage
des contrôleurs du problème.
Les simulations d'un système non-linéaire en
domaine temporel, qui représentent une extrapolation naturelle de
l'analyse de la stabilité transitoire, fournissent des informations
importantes mais limitées en ce qui concerne la stabilité
dynamique. Ainsi :
- le choix de la perturbation et la sélection des
variables à observer sont critiques,
- la perturbation peut être insuffisante pour exciter les
modes critiques,
- les réponses temporelles ne peuvent donner directement
une information sur la source des oscillations,
- plusieurs modes sont mélangés dans les courbes
des simulations temporelles.
L'analyse du modèle linéaire du système
semble un moyen idéal pour étudier profondément les
oscillations électromécaniques et les problèmes
associés. La stabilité et les caractéristiques de chaque
mode peuvent par exemple être identifiées clairement en examinant
les valeurs propres du système. Les vecteurs propres quant à eux
montrent aisément la nature de ces modes et les relations entre eux et
les variables d'état.
Ainsi, une compréhension complète des
oscillations de système de puissance nécessite la combinaison
d'outils analytiques. L'analyse du modèle linéaire
complétée par des simulations en domaine temporel du
modèle non-linéaire représente la procédure la plus
efficace pour bien étudier et analyser les oscillations de
système de puissance (Farmer, 2006). Les étapes suivantes sont
nécessaires pour une étude systématique des oscillations,
figure (48) :
1- examen des valeurs propres du système. Il indique
la présence des modes mal ou non- amortis. L'analyse modale de ces modes
permet de déterminer leurs caractéristiques et leurs origines.
2- réalisation des simulations du système
non-linéaire dans le domaine temporel pour les cas critiques
identifiés par l'analyse modale. Cela confirme les résultats de
l'analyse du modèle linéaire et montre en plus l'influence de la
non-linéarité du système sur les oscillations.

Stabilité transitoire
Transition dynamique d'un point de
fonctionnement à
un autre.
Modèle non-linéaire
Simulation (Analyse
temporelle)
Méthodes d'intégration numérique.
Stabilité dynamique
Variation dynamique autour d'un point
de fonctionnement.
Modèle linéaire
Analyse du modèle
linéaire
Analyse des valeurs propres
et analyse
modale.
Figure 48. Analyse des oscillations d'un
système de puissance.
Enfin, en supposant que le réglage des
contrôleurs est fait au point de fonctionnement nominal du
système, il est nécessaire de vérifier la robustesse du
réglage. Dans le contexte du réglage du contrôleur
d'amortissement d'un système de puissance, la robustesse signifie que
l'amortissement est suffisant et que les oscillations s'amortissent rapidement
lors des simulations temporelles du système pour toutes les
perturbations probables et pour tous les points de fonctionnement
significatifs. Ainsi, les critères de bonne régulation doivent
être respectés pour tous les scénarios
considérés (Pal et al., 2005).
4.3.1- Critères d'analyse du modèle
linéaire.
Rappelons que le facteur d'amortissement Ç d'un
mode représenté par sa valeur propre complexe )L est
donné par :
ó
-
=
(130)
ó 2 ù
2
+

æ
Avec : ë= ó #177;
jù (131)
- Un facteur d'amortissement Ç important
aboutit à une réponse dynamique bien amortie. Pour cela, toutes
les valeurs propres doivent se trouver dans la zone gauche du plan complexe
limité par deux demi-droites issues de l'origine, figure (47). Pour une
valeur critique du facteur d'amortissement Çcr : on impose
alors une marge de stabilité relative (Allenbach, 2005, I).
- La partie réelle de la valeur propre
ci
· détermine la rapidité de
décroissance/croissance des exponentielles composant la réponse
dynamique du système. Ainsi, ci
· très
négatif aboutit à une réponse dynamique rapide. Pour cela,
toutes les valeurs propres doivent se trouver dans la zone gauche du plan
complexe limité par une verticale passant par une valeur critique de la
partie réelle (ci
·cr), figure (47) : on
définit ainsi la marge de stabilité absolue.
Lors du réglage des paramètres des PSSs, il est
souhaitable que ces deux critères soient pris en compte pour permettre
une bonne régulation. La combinaison entre ces deux critères
aboutit à une zone appelée zone de stabilité D,
(Yee et al., 2004), figure (49). Le déplacement des valeurs
propres dans cette zone garantit une performance robuste pour un grand nombre
de points de fonctionnement (Singh, 2004).
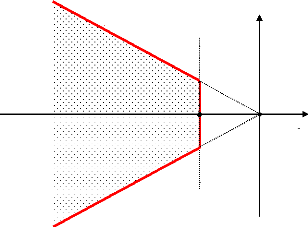
æcr
joi
ci
·
ócr
Figure 49. Zone de la stabilité
D.
Considérons par exemple un mode d'une fréquence
naturelle de 1 Hz, les oscillations associées à ce mode
s'amortissent en 13 secondes pour Ç = 0.05 et en 6.5 et 3
secondes pour Ç = 0.1 et Ç = 0.2
respectivement. Quelle est alors la valeur minimale adéquate
d'amortissement pour un bon fonctionnement du système de puissance?
La littérature ne présente pas de valeurs
critiques rigoureuses admises par tous. Généralement, un facteur
d'amortissement de 0.05 n'assure qu'une petite marge de sécurité
tandis que Ç = 0.03 doit être accepté avec
réserve. Les valeurs d'amortissement entre 0.05 et 0.15 sont globalement
les plus utilisées dans la littérature. Nous avons choisi
Çcr = 0.1 comme facteur d'amortissement critique. Ainsi, nous
considérons que l'amortissement des oscillations est suffisant si tous
les modes du système présentent des facteurs d'amortissement plus
grands que Çcr.
D'une façon similaire, la littérature donne une
gamme de variation de la valeur critique de la partie réelle des valeurs
propres, comprise entre - 0.5 et - 1. Nous avons choisi ocr = - 1
comme partie réelle critique à respecter par tous les modes.
Enfin, d'autres spécifications peuvent être
utilisées telles les spécifications de la réponse du
système dans le domaine temporel (le dépassement maximum, le
temps d'établissement, l'erreur statique, ...), (Yee et al.,
2004).
4.3.2- Critères de simulation.
La performance d'un contrôleur nécessite des
critères pour évaluer le "bon" comportement du système.
Elle peut être spécifiée dans le domaine temporel et/ou
fréquentiel (Pal et al., 2005).
Les caractéristiques dynamiques peuvent être
décrites en examinant la réponse à une entrée
typique (tel un échelon unité, ...). Ainsi, les
spécifications de la réponse transitoire (tels le
dépassement maximum, le temps de réponse, le temps de pic, ...)
tout comme les critères intégraux (tels IAE, ISE, ITAE, ...)
peuvent être utilisés comme indicateurs de performance des boucles
de régulation (Aström et al., 1995).
4.3.2.1- Critères temporels
instantanés.
La réponse indicielle (réponse à un
échelon unité) d'un système oscillant du deuxième
ordre est donnée à la figure (50), (Allenbach, 2005, I).
Nous définissons les paramètres critiques
apparaissant sur cette figure : 1- Dépassement
maximum Dp
Il est la mesure de la valeur maximale atteinte par la
réponse indicielle lors de son premier dépassement. Cette valeur
est souvent pondérée par la valeur finale : on parle alors de
dépassement maximum en pour cent, noté Dp% et
calculé par la relation suivante.
% max · 100
y y
D (132)
- f
=
y
p
f
Le dépassement maximum s'exprime en fonction du facteur
d'amortissement comme suit :
ðæ

2
Dp =e (133)
1 - æ
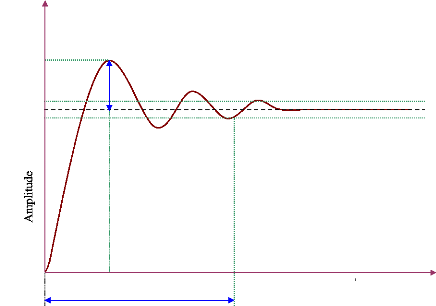
ymax
Dp
105 % 100 % yf
95 %
tp
Temps
0
tr (5 %)
Figure 50. Caractéristiques de la
réponse indicielle d'un système. 2-Temps de
pic tp
Ce paramètre correspond à l'abscisse du
dépassement maximum. Ce paramètre de temps peut être
déterminé analytiquement en fonction du facteur d'amortissement
et de la pulsation naturelle d'oscillation, comme suit :
ð
tp (134)

2
=
ù n
1 æ
-
3- Temps de réponse (temps
d'établissement) tr(5%)
Il correspond au temps nécessaire à la
réponse indicielle pour atteindre sa valeur finale avec une
tolérance de #177;n% près. La tolérance de 5% est
la plus communément utilisée. Ce paramètre
caractérise la rapidité relative de la réponse du
système. La relation approximative entre le temps de réponse, le
facteur d'amortissement et la pulsation naturelle d'oscillation est
donnée comme suit :
3
t ù æ avec
< æ <
, 0 1 (135)
r (5 %)
n
La valeur critique du temps de réponse de la
stabilité dynamique (dite aussi stabilité dynamique) varie d'un
opérateur de système de puissance à l'autre.
Généralement, elle s'étend de 10 à 20 secondes (Pal
et al., 2005).
Finalement, nous pouvons remarquer qu'une augmentation du facteur
d'amortissement aboutit à une diminution du dépassement maximum
et du temps de réponse.
4.3.2.2- Critères temporels
intégraux.
Soit å(t) l'erreur dynamique
associée à la réponse indicielle du système.
Différents critères typiques peuvent être utilisés
pour caractériser la performance du système régulé.
Nous les définissons ci-dessous.
1- Critère IAE, Intégrale de
l'Erreur Absolue (Integral of Absolute Error). Le critère
de performance est le suivant :
t
e( ) (136)
t dt
IAE j.

0
Etant donné que ce critère prend en compte tous
les éléments de la réponse harmonique, il donc important
lorsque la réponse du système est oscillatoire ; les faibles
amortissements ne sont pas ainsi conseillés.
2- Critère ISE,
Intégrale du Carrée de l'Erreur (Integral of Square Error).
Le critère de performance est alors le suivant :
e 2 ( ) (137)
t dt
0
En général, le fait de travailler avec le
carré de l'erreur amplifie l'importance des valeurs de sortie qui
s'écartent le plus de la valeur finale.
3- Critère ITAE, Intégrale de
l'Erreur Absolue pondérée par le Temps (Integral Time multiplied
by Absolute Error).
Le critère de performance est le suivant :
t
t t dt
e( ) (138)
ITAE j.

0
Puisque la valeur du critère ITAE est
pondérée par le temps, l'erreur statique est fortement
pénalisée : les systèmes à réponse
très oscillatoire sont ainsi pénalisés.
En règle générale, le système sera
d'autant mieux réglé que le critère intégral choisi
sera minimal.
4.3.3- Conclusion.
Le choix de critère de simulation le plus performant
(le bon critère) est délicat. Nous avons opté dans notre
travail pour les critères instantanés de préférence
aux critères intégraux de façon à faciliter la
comparaison avec les résultats de la littérature.
4.4- Développement de l'AG. 4.4.1-
Introduction.
Rappelons que les AGs sont des algorithmes d'optimisation
s'appuyant sur des techniques dérivées de la
génétique et de l'évolution naturelle avec trois
opérateurs : croisement, mutation et sélection. L'usage d'un AG
est d'une part adapté à une exploration rapide et globale d'un
espace de recherche de taille importante et d'autre part capable de fournir
plusieurs solutions. Un AG recherche le ou les extrema d'une fonction
définie (fonction objectif) sur un espace de recherche
définissant les contraintes des paramètres à optimiser.
Dans ce paragraphe nous présentons la formulation de la
fonction multiobjectif proposée et la mise en oeuvre de l'AG
utilisé.
4.4.2- Fonction objectif.
Le but de l'utilisation des PSSs est d'assurer un
amortissement satisfaisant des oscillations et de garantir la stabilité
globale du système pour différents points de fonctionnement. Pour
répondre à ce but, nous avons utilisé une fonction
multiobjectif composée de deux fonctions objectif. Cette fonction
multiobjectif doit maximiser la marge de stabilité en augmentant les
facteurs d'amortissement tout en minimisant les parties réelles des
valeurs propres du système. Par conséquent, toutes les valeurs
propres seront dans la zone D de stabilité.
Les étapes de calcul de cette fonction multiobjectif sont
les suivantes :
1- Formuler le système linéaire en boucle ouverte
(sans PSSs).
2- Positionner les PSSs avec leurs paramètres
initialisés par l'AG à travers une population initiale.
3- Fermer la boucle en reliant le
jème PSS entre la sortie du
jème générateur et son
entrée.
4- Calculer les valeurs propres du système en boucle
fermée et prendre uniquement les modes dominants dont le
ième mode se traduit par :
ë i = ó i #177; jù
i (139)
5- Trouver les parties réelles des valeurs propres du
système (ói) et calculer les facteurs d'amortissement
(æi) pour les ième modes:
æi
-ói
=
(140)
2 2
+ ù i
ó i

6- Déterminer la valeur minimale de (æi)
et la valeur maximale de (- ói), qui peuvent être
formulées respectivement comme : (minimum (æi))
et (? maximum (ói)).
7- Rassembler les deux fonctions objectif en une fonction
multiobjectif F comme suit (méthode de pondération) :
F = -max(ó i )+min(
æ i ) (141)
8- Renvoyer la valeur de cette fonction multiobjectif au
programme de l'AG pour relancer une nouvelle génération.
Dans notre cas, nous n'avons privilégié aucune
fonction objectif sur une autre : le coefficient de pondération de
chaque fonction individuelle est donc égal à 1.
4.4.3- Mise en oeuvre de l'AG. 4.4.3.1- Codage du
problème.
L'objectif de cette étude est d'appliquer l'AG pour
trouver :
- les valeurs optimales des paramètres des PSSs pour un
meilleur amortissement, - leur localisation optimale,
- le nombre suffisant des PSSs.
Ainsi, le nombre de variables utilisé (pour chaque PSS)
à l'entrée de l'AG variera selon trois cas étudiés
:
1- Premier cas : trois variables (un
gain et deux constantes de temps). L'objectif est simplement d'optimiser les
paramètres des PSSs.
2- Deuxième cas : quatre
variables (l'emplacement des PSSs, un gain et deux constantes de temps).
L'objectif maintenant est d'optimiser les paramètres des PSSs et leur
localisation.
3- Troisième cas : cinq
variables (un commutateur déterminant la mise en service ou non d'un
PSS, l'emplacement des PSSs, un gain et deux constantes de temps). L'objectif
est d'optimiser enfin les paramètres des PSSs et leur localisation et de
réduire leur nombre.
Ces variables sont soumises aux contraintes suivantes :
|
KPSS
|
, ,
j
|
min
|
= =
K K
PSS j PSS j
, , , max
|
T1
min
, ,
j
==
T T
max
1 , 1 , , j j
= =
T T
3 , 3 , , max
j j
{ }
Gen Gen
1 L , , n
{ }
0,1
(142)
T3
min
, ,
j
,
PLPSS
j
,
SWPSS
j
KPSS : le gain du PSS.
T1 : la constante de temps du PSS.
T3 : la constante de temps du PSS.
NPSS : le nombre maximum des PSSs à ajouter aux
générateurs.
PLPSS : le numéro de générateur
auquel le PSS doit être connecté. Sa valeur varie entre 53 et
68.
SWPSS : une variable représentant des
commutateurs permettant de relier (si la valeur est 1) ou débrancher (si
la valeur est 0) les PSSs des générateurs, afin d'en
réduire leur nombre.
Pour coder le problème, à Nvar
nombre de variables, chaque variable (chromosome) est représentée
par Sl chaîne de bits (Sl gène) de
longueur Ngens, où : l = 1, 2,..., Nvar.
A titre d'exemple, la figure (51) suivante montre une
configuration d'un individu, composée de cinq chromosomes,
représentant le troisième cas étudié.
1 1 0 1 ...
0 1 0 1 ...
0 0 0 1 ...
1 0 0 0 ...
0 1 1 1 ...
... 0 1
... 1 1
... 1 0
... 1 1
... 0 0
Constante de temps T3
Constante de temps T1
Gain KPSS
Commutateur SWPSS Emplacement
PLPSS
Figure 51. Représentation d'un
individu pour le troisième cas étudié.
Le type de codage choisi dans cette étude est le codage
binaire : il est standard et applicable pour plusieurs types de
problèmes.
4.4.3.2- Population initiale.
Les AGs nécessitent une population initiale pour
commencer le processus de recherche. La méthode appliquée fait
générer aléatoirement un ensemble de solutions dans les
contraintes proposées pour la population entière : c'est la
méthode la plus commune.
Une représentation d'une population initiale de
Nind individus (solutions) est illustrée par la
figure (52).
0 0 0 1 ...
0 1 1 1 ...
1 1 0 1 ...
0 0 1 1
0 1 0 1 ...
10 0 0 ...
0 0 0 1 ...
0 1 0 1 ...
1 0 0 0
0 1 1 1 ...
...
...
... 0 0
0
... 1 0
... 1 1
... 0 1
... 0 1
0 1
... 1 0
... 1 1
... 1 1
... 0 0
0 1
0 0
1
0
0
Figure 52. Représentation de la
population entière de Nind individus.
4.4.3.3- Sélection.
Après génération de la population
initiale, la performance de chaque individu est évaluée : la
performance mesure la qualité de la solution probable pour comparer les
différentes solutions. Nous avons pris la valeur associée
à la fonction objectif comme indice de performance.
Après calcul de cet indice pour chaque individu, le
mécanisme de sélection est appliqué pour copier les
individus sélectionnés. Les individus ayant des performances
élevées ont plus de probabilité d'être reproduits
dans la génération suivante. Nous avons appliqué la
méthode de la roulette biaisée.
4.4.3.4- Croisement.
Après l'étape de sélection, le croisement
est appliqué. Dans cette étape, les individus sont
regroupés aléatoirement par paire (parents). Le croisement se
fait ensuite pour créer les enfants avec une probabilité
Pc, sinon les parents ne changent pas. Cet opérateur
sert à explorer des nouvelles régions dans l'espace de recherche.
Le type de croisement le plus simple est le croisement seul point : nous
l'avons appliqué dans cette étude.
4.4.3.5- Mutation.
Pour introduire une certaine diversification dans la
population et éviter ainsi une convergence prématurée en
un optimum local, l'opérateur de mutation est appliqué. Les bits
subissent la mutation sont choisis aléatoirement avec une
probabilité Pm.
4.4.4- L'organigramme du problème.
Les étapes de la formulation de la fonction multiobjectif
et du programme de l'AG sont donnés à la figure (53).
4.4.5- Conclusion.
Dans les parties précédentes de ce chapitre,
nous avons décrit le réseau électrique
étudié dans ce travail et détaillé les
critères de la stabilité qui sont très nécessaires
pour évaluer concrètement nos résultats. Nous avons aussi
présenté la formulation de la fonction multiobjectif
proposée et les points de la mise en oeuvre de l'AG utilisé.
Dans la partie suivante, nous allons mettre en application nos
approches. Les résultats obtenus seront analysés et
discutés :
- Nous commençons avec l'analyse du système sans
l'utilisation des PSSs.
- Nous présentons, par la suite, les résultats
de l'application du premier cas destiné à optimiser les
paramètres des PSSs du système par l'AG. Nous comparons ces
résultats avec ceux déterminés par une méthode
classique (compensation de phase) et par une méthode
métaheuristique (algorithmes d'optimisation par essaim de particules) et
avec ceux fournis dans la littérature.
- Dans le deuxième et troisième cas, nous
optimisons l'emplacement et le nombre des PSSs. Les objectifs et les
intérêts de ces applications et leurs résultats seront
présentés et discutés.
Population initiale pour les
paramètres à
optimiser
Figure 53. Organigramme de la fonction
multiobjectif et du programme de l'AG.
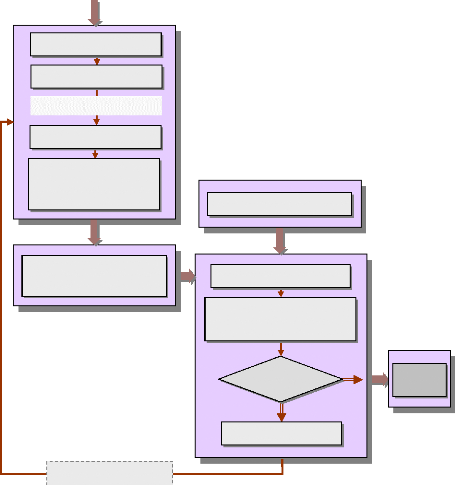
Base de données du système
Ecoulement de puissance
Point de fonctionnement
Linéarisation du système
Valeurs propres
pour chaque individu :
ói, æi
Paramètre de réglage d'AG
La fonction multiobjectif
F = -max(ó i
)+min(æ i
)
Evaluation des solutions
Opérateurs d'AG :
(Sélection, Croisement,
Mutation)
Oui
Gener < Genermax ?
Non
Nouvelle population
Nouvelle génération
Résultat
4.5- Résultat et discussion. 4.5.1- Le
système sans PSSs.
Nous étudions en premier lieu le fonctionnement du
système sans PSSs. Les modes électromécaniques dominants
du système pour le point de fonctionnement considéré sont
donnés dans le tableau (4) et à la figure (54).
|
N° mode
|
ë
|
æ
|
f [Hz]
|
|
1
|
- 0.4120#177; j 9.8436
|
0.0418
|
1.5667
|
|
2
|
- 0.0095#177; j 2.3974
|
0.0040
|
0.3816
|
|
3
|
+ 0.0063#177; j 3.1120
|
- 0.0020
|
0.4953
|
|
4
|
+ 0.0377#177; j 3.8959
|
- 0.0097
|
0.620 1
|
|
5
|
- 0.0116#177; j 4.0526
|
0.0029
|
0.6450
|
|
6
|
- 0.4056#177; j 8.3777
|
0.0484
|
1.3333
|
|
7
|
- 0.2814#177; j 8.2667
|
0.0340
|
1.3157
|
|
8
|
- 0.3295#177; j 8.2650
|
0.0398
|
1.3154
|
|
9
|
+ 0.2152#177; j 6.2618
|
- 0.0344
|
0.9966
|
|
10
|
+ 0.1188#177; j 6.6535
|
- 0.0178
|
1.0589
|
|
11
|
+ 0.3803#177; j 7.3056
|
- 0.0520
|
1.1627
|
|
12
|
+ 0.2420#177; j 6.8133
|
- 0.0355
|
1.0844
|
|
13
|
+ 0.0919#177; j 7.1486
|
- 0.0129
|
1.1377
|
|
14
|
+ 0.2216#177; j 7.2291
|
- 0.0306
|
1.1506
|
|
15
|
+ 0.0717#177; j 7.0438
|
- 0.0102
|
1.1211
|
Tableau 4. Valeurs propres du
système sans PSSs.
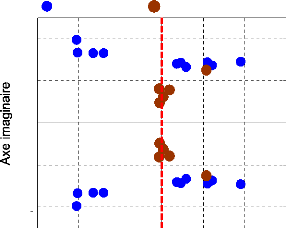
10
5
0
-5
-10
Modes locaux Modes interrégionaux
-0.6 -0.4 -0.2 0.2 0.4 0.6
0
Axe réel
Figure 54. Répartition des valeurs
propres du système dans le plan complexe (sans PSSs).
Nous appliquons maintenant une petite perturbation
normalisée en échelon de 1% sur le couple mécanique du
générateur 53. La variation de vitesse des
générateurs qui fait suite à cette perturbation est
montrée à la figure (55).
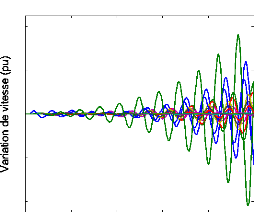
x 10-3
8
4
0
-4
-8
0 2 4 6 8 10
Temps (s)
Figure 55. Variation de vitesse des
générateurs (sans PSSs).
Ainsi, il est évident que le système contient
des modes instables (en gras dans le tableau (4)) et d'autres mal amortis. Le
comportement du système aux petites perturbations montre clairement
cette instabilité du système (divergence de l'ensemble des
générateurs).
La présence de modes d'oscillations
électromécaniques fortement instables déterminés
par l'analyse de la réponse du système en modèle
linéaire conduit évidemment à la perte de stabilité
aux grandes perturbations. Nous appliquons un défaut triphasé sur
la ligne (59#23) suivi par une élimination du défaut. Le temps de
défaut et de retour à l'état initial est choisi de l'ordre
de 6 périodes du réseau (0.1 s). Les réponses temporelles
de la variation de vitesse et des angles de rotor des générateurs
suite au défaut choisi sont montrées à la figure (56).
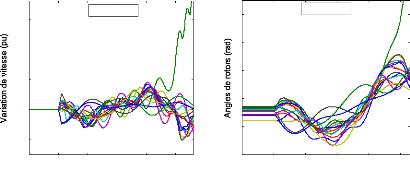
8
0.06
sans PSSs
6
sans PSSs
0.04
4
0.02
2
0
0
-0.02
0 1 2 3 4 5
Temps (s)
-2 0 1 2 3 4 5
Temps (s)
a b
Figure 56. Réponse dynamique des
générateurs (sans PSSs)
a : variation de
vitesse, b : angles de rotor.
Cette figure montre bien que les modes instables mènent
à un écart croissant apériodique de certains angles de
rotor et par conséquent à la perte de la stabilité du
système.
Pour rétablir la stabilité du système et
améliorer son amortissement global, les PSSs sont maintenant
ajoutés aux générateurs. Dans la suite de ce chapitre,
nous faisons appel aux AGs pour optimiser les paramètres des PSSs selon
les trois cas présentés précédemment.
4.5.2- Les scénarios et
défauts.
Pour analyser la performance et la robustesse du
réglage, nous devons analyser les nouvelles valeurs propres du
système et examiner l'amortissement obtenu avec les PSSs
optimisés pour différents scénarios crédibles,
tableau (5). Nous allons appliquer ces analyses au point de fonctionnement
nominal utilisé pour l'optimisation (noté premier
scénario) et pour deux autres points représentant deux
scénarios sévères. En effet, le deuxième et
troisième scénario, définis ci-dessus, sont
déterminés à partir des simulations que nous avons
réalisées et représentent les contraintes les plus dures
pour le système :
- Le scénario deux peut être
considéré comme un scénario sévère car les
lignes d'interconnexion (8#9) et (46#49) participent fortement aux oscillations
interrégionales et la perte de ces deux lignes va affaiblir
considérablement les interconnexions entre les régions du
système.
- Le scénario trois est aussi un scénario
sévère. Il correspond à une diminution de puissance du
générateur 68 associée à une augmentation de la
charge connectée au jeu de barre 37. Or le générateur 68 a
une puissance importante et la charge connectée au jeu de barre 37
consomme la puissance la plus grande du réseau. Enfin, ce
scénario implique la perte de la ligne (2#3).
N° scénario
1
2
Configuration de scénario
Point de fonctionnement nominal
- Ligne 8#9 hors service
- Ligne 46#49 hors service
- Diminution 25% de la puissance active du
générateur 16
3 - Augmentation 25% de la puissance active de
la charge au jeu de barre 37
- Ligne 2#3 hors service
Tableau 5. Liste des scénarios
proposés.
Jusqu'à maintenant, l'analyse de réglage est
basée seulement sur le modèle linéaire du système.
Etant donné que le modèle d'origine est non-linéaire, nous
devons évaluer la performance et la robustesse du réglage des
PSSs en considérant le modèle non-linéaire originel. Pour
ce faire, nous effectuons des simulations temporelles du système pour
ces différents scénarios en présence d'une perturbation
transitoire sévère déduite de simulations. Cette
perturbation sévère correspondant à un défaut
triphasé sur la ligne (59#23) est appliquée à
proximité du jeu de barre 59 ; il est suivi par une ouverture des
disjoncteurs et une fermeture de la ligne après élimination du
défaut. Le temps de défaut et de retour à l'état
initial est choisi de l'ordre de 6 périodes du réseau (0.1 s).
4.5.3- Cas 1 : optimisation des paramètres des
PSSs.
Dans la suite de ce paragraphe, nous présentons les
étapes habituelles de l'optimisation des paramètres des PSSs,
à savoir :
- Détermination de la meilleure localisation des PSSs. La
méthode utilisée pour
déterminer cette implantation est la méthode des
facteurs de participation.
- Optimisation des valeurs des paramètres des PSSs,
déjà installés dans le système. La
méthode d'optimisation utilisée est les AGs.
- Vérification de la performance et de la robustesse
correspondant au réglage effectué pour différents
scénarios. Pour ce faire, nous utilisons l'analyse par valeurs propres
et l'évaluation temporelles des performances par simulations
dynamiques.
4.5.3.1- Localisation des PSSs.
La méthode des facteurs de participation nous permet de
déterminer les générateurs participants à chaque
mode critique. Les générateurs présentant les valeurs de
participation les plus élevées sont ceux qui nécessitent
d'être équipés en priorité de PSSs. Les
résultats sont donnés dans le tableau (6) : 14
générateurs participent principalement à ces modes. La
fréquence de chaque mode et les générateurs
associés déterminent le type du mode. Nous avons ainsi quatre
modes de type interrégional et onze modes de type local.
|
N° mode
|
ë
|
f [Hz]
|
Générateurs participants
|
Type de mode
|
|
1
|
- 0.4120#177; j 9.8436
|
1.5667
|
G. 63
|
Local
|
|
2
|
- 0.0095#177; j 2.3974
|
0.3816
|
G. 65, G. 67, G. 66
|
Interrégional
|
|
3
|
0.0063#177; j 3.1120
|
0.4953
|
G. 68, G. 66
|
Interrégional
|
|
4
|
0.0377#177; j 3.8959
|
0.6201
|
G. 65, G. 58, G. 57
|
Interrégional
|
|
5
|
- 0.0116#177; j 4.0526
|
0.6450
|
G. 67, G. 66, G.68
|
Interrégional
|
|
6
|
- 0.4056#177; j 8.3777
|
1.3333
|
G. 56
|
Local
|
|
7
|
- 0.2814#177; j 8.2667
|
1.3175
|
G. 60
|
Local
|
|
8
|
- 0.3295#177; j 8.2650
|
1.3154
|
G. 59
|
Local
|
|
9
|
0.2152#177; j 6.2618
|
0.9996
|
G. 64
|
Local
|
|
10
|
0.1188#177; j 6.6535
|
1.0589
|
G. 57
|
Local
|
|
11
|
0.3803#177; j 7.3056
|
1.1627
|
G. 61
|
Local
|
|
12
|
0.2420#177; j 6.8133
|
1.0844
|
G. 54
|
Local
|
|
13
|
0.0919#177; j 7.1486
|
1.1377
|
G. 58
|
Local
|
|
14
|
0.2216#177; j 7.2291
|
1.1506
|
G. 55
|
Local
|
|
15
|
0.0717#177; j 7.0438
|
1.1211
|
G. 62
|
Local
|
Tableau 6. Générateurs
participants aux modes critiques.
L'analyse des facteurs de participation montre l'influence de
chaque générateur dans le mode en question. Si la participation
d'un générateur est relativement faible, le placement d'un PSS
sur ce générateur n'apportera que peu d'amélioration. Les
figures (57) et (58) montrent les facteurs de participation associés aux
angles et aux variations de vitesse de chaque générateur pour les
quatre modes interrégionaux (les modes 2, 3, 4 et 5) et pour deux modes
locaux (modes 1 et 6).
La méthode des facteurs de participation détermine
donc 14 générateurs devant être équipés des
PSSs. Ce sont les suivants :
|
G. 54
|
G. 55
|
G. 56
|
G. 57
|
G. 58
|
G. 59
|
G. 60
|
|
G. 61
|
G. 62
|
G. 63
|
G. 64
|
G. 65
|
G. 67
|
G. 68
|
Le réglage des paramètres de ces PSSs fait l'objet
du paragraphe suivant.
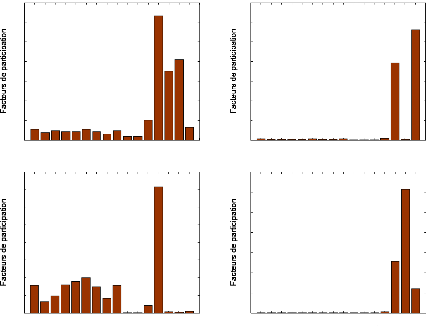
Numéro de générateur
Numéro de générateur
0.7
Mode 2
Mode 3
0.3
0.6
0.25
0.5
0.2
0.4
0.15
0.3
0.1
0.2
0.1
0.05
0
0
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
68
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
68
Numéro de générateur
Numéro de générateur
0.7
0.4
Mode 4
Mode 5
0.35
0.6
0.3
0.5
0.25
0.4
0.2
0.3
0.15
0.2
0.1
0.1
0.05
0
0
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
68
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
68
Figure 57. Facteurs de participation des
modes interrégionaux (modes 2, 3, 4 et 5).
Numéro de générateur Numéro de
générateur
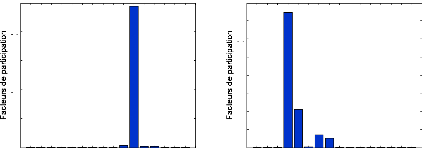
0.8
0.6
0.4
0.2
0
1
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
68
Mode 1
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
68
Mode 6
Figure 58. Facteurs de participation de
deux modes locaux (modes 1 et 6).
4.5.3.2- Réglage des paramètres des PSSs
par l'AG.
Nous utilisons les AGs pour optimiser simultanément le
réglage des paramètres des PSSs en se basant sur le modèle
linéaire du système. L'objectif de ce réglage
simultané est d'évaluer l'amortissement de tout le système
et de minimiser les possibles interactions défavorables entre les PSSs.
Pour atteindre cet objectif, les valeurs propres du système doivent,
comme nous l'avons vu, se placer dans la zone D de
stabilité.
Ainsi, l'AG appliqué doit maximiser les valeurs fournies
par la fonction multiobjectif du système. Pour le cas
étudié, le problème d'optimisation est alors
formulé comme suit :
OptAG max( max( i ) min(
i ))
= - ó + æ (143)
La figure (59) donne une représentation graphique de cette
procédure d'optimisation cordonnée.
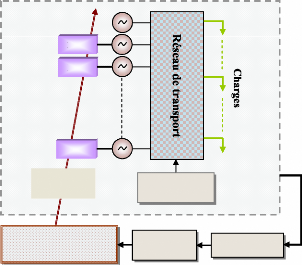
Algorithme génétique
Paramètres
des PSSs
PSS 14
PSS 1
PSS 2
G16
G2
G3
G1
Fonction
multiobjectif
Point de
fonctionnement
Valeurs propres
Figure 59. Optimisation coordonnée
des paramètres des PSSs.
Les trois paramètres à optimiser pour chaque PSS
(un gain et deux constantes de temps) sont soumises aux contraintes suivantes
:
|
0.1 40
= =
K PSS j
,
0 . 00 1 0 . 1
= =
T 1 , j
0 . 00 1 0 . 1
= =
T 3 , j
|
(144)
|
|
avec
|
j
|
1,2,
|
|
, NPSS
|
Les autres paramètres (Tw,j
et T2,j, T4,j) des PSSs sont considérés
constants : Tw,j = 10 et T2,j = T4,j = 0.02.
Le tableau (7) donne les valeurs choisies des paramètres
de l'AG.
|
Nombre d'individu Nind
|
75
|
|
Nombre de gènes Ngens
|
Nind x Nvar
|
|
Nombre de génération Ngener
|
250
|
|
Probabilité de croisement Pc
|
0.9
|
|
Probabilité de mutation Pm
|
0.005
|
Tableau 7. Valeurs choisies des
paramètres de l'AG.
La figure (60) montre la convergence des paramètres des
PSSs (KPSSi, T1i et T3i) vers
leurs valeurs optimales. Pendant les premières
générations, les valeurs de ces paramètres (les individus)
sont réparties sur la quasi-totalité de leurs espaces de
recherche. Au fur et à mesure de la progression des
générations, les individus (de chaque paramètre)
s'orientent et convergent enfin vers leurs valeurs optimales. Ces
dernières sont données dans le tableau (8).
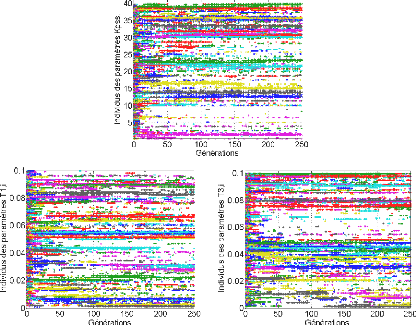
a
b c
Figure 60. Convergence de la population
des paramètres des PSSs (a : KPSSi, b
: T1i, c : T3i).
|
N° PSS
|
N° G.
|
KPSS
|
T1
|
T3
|
|
1
|
54
|
35.2115
|
0.0543
|
0.0484
|
|
2
|
55
|
21.4336
|
0.0222
|
0.0424
|
|
3
|
56
|
33.4921
|
0.0665
|
0.0981
|
|
4
|
57
|
30.7770
|
0.0309
|
0.0469
|
|
5
|
58
|
35.8410
|
0.0901
|
0.0796
|
|
6
|
59
|
23.3611
|
0.0511
|
0.0377
|
|
7
|
60
|
01.5493
|
0.0829
|
0.0798
|
|
8
|
61
|
12.7207
|
0.0067
|
0.0309
|
|
9
|
62
|
30.1377
|
0.0882
|
0.0749
|
|
10
|
63
|
13.9789
|
0.0518
|
0.0754
|
|
11
|
64
|
38.7296
|
0.0598
|
0.0908
|
|
12
|
65
|
15.1873
|
0.0266
|
0.0081
|
|
13
|
67
|
39.9831
|
0.0012
|
0.0015
|
|
14
|
68
|
32.3178
|
0.0010
|
0.0010
|
Tableau 8. Paramètres des PSSs
optimisés par AG.
L'évolution de la fonction multiobjectif en fonction du
nombre de générations est donnée à la figure (61) ;
la valeur finale atteinte pour la génération maximale
prédéterminée de 250 est de 1.097. Les évolutions
des deux composantes (æ et ó) de la fonction
multiobjectif sont données quant à elles à la figure (62).
Nous remarquons sur cette dernière que la valeur minimale optimale de
(æ) et la valeur maximale optimale de (ó) sont
atteintes pour la génération maximale
prédéterminée de 250.
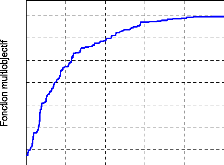
1.1
1
0.9
0.8
0.7
0.6
0.5
0 50 100 150 200 250
Générations
Figure 61. Evolution de la fonction
multiobjectif.
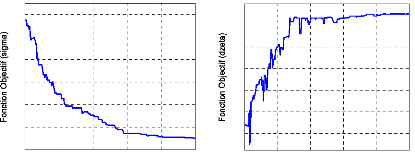
0.16
-0.4
0.14
-0.5
0.12
-0.6
0.1
-0.7
0.08
-0.8
0.06
-0.9
0.04
0 50 100 150 200 250
Générations
0 50 100 150 200 250
Générations
-1
a b
Figure 62. Evolutions des composantes de
la fonction multiobjectif (a : æ, b :
ó).
4.5.3.3- Analyse des valeurs propres. 4.5.3.3.1- Le
point de fonctionnement nominal.
Les valeurs propres du système, équipé de
ces 14 PSSs, et leur répartition dans le plan complexe sont
données respectivement dans le tableau (9) et à la figure
(63).
|
N° mode
|
ë
|
æ
|
f [Hz]
|
|
1
|
- 7.5602 #177; j 14.579
|
0.4603
|
2.3203
|
|
2
|
- 2.4631 #177; j 13.726
|
0.1766
|
2.1847
|
|
3
|
- 9.1765 #177; j 10.153
|
0.6705
|
1.6160
|
|
4
|
- 9.5284 #177; j 6.6435
|
0.8203
|
1.0573
|
|
5
|
- 1.9641 #177; j 9.1431
|
0.2100
|
1.4552
|
|
6
|
- 1.0945 #177; j 7.2031
|
0.1502
|
1.1464
|
|
7
|
- 1.0897 #177; j 7.1452
|
0.1508
|
1.1372
|
|
8
|
- 3.5594 #177; j 5.5850
|
0.5375
|
0.8889
|
|
9
|
- 5.6561 #177; j 3.9954
|
0.8 168
|
0.6359
|
|
10
|
- 3.7923 #177; j 4.4182
|
0.65 13
|
0.7032
|
|
11
|
- 4.2798 #177; j 3.1753
|
0.8031
|
0.5054
|
|
12
|
- 0.9485 #177; j 3.8260
|
0.2406
|
0.6089
|
|
13
|
- 1.1258 #177; j 3.3302
|
0.3203
|
0.5300
|
|
14
|
- 0.9560 #177; j 2.9392
|
0.3093
|
0.4678
|
|
15
|
- 1.3365 #177; j 2.6372
|
0.4521
|
0.4197
|
Tableau 9. Valeurs propres du
système (14 PSSs optimisés par AG).
D'après l'analyse des valeurs propres du
système, nous trouvons que le facteur d'amortissement minimum est
æmin = 15.02 % et que la partie réelle maximale des
valeurs propres est ómax = - 0.9485.
Nous pouvons remarquer que les modes
électromécaniques (locaux et interrégionaux) ont
été décalés dans la zone D de
stabilité du plan complexe. Il apparaît deux valeurs propres
situées juste à l'extérieur de la zone D : les
valeurs obtenues restent néanmoins très proches de la limite de
zone. Elles conservent en outre une excellente marge de stabilité
absolue. Enfin, elles correspondent à des facteurs d'amortissement
très supérieurs au critère que nous avions
précédemment défini.
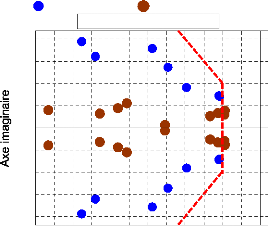
1er cas , 1er scénario
20
dz = 10 %
10
0
-10
-20
-6 -5 -4 -3 -2 - 0
-1
Modes locaux Modes interrégionaux
Axe réel
Figure 63. Répartition des valeurs
propres du système dans le plan complexe
(14 PSSs optimisés
par AG).
La variation de vitesse des générateurs qui fait
suite à une petite perturbation en échelon de 1% sur le couple
mécanique du générateur 53 est présentée
à la figure (64).
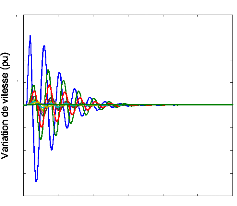
4x 10-4
3
2
1
0
-1
-2
-3
-4 0 2 4 6 8 10 12
Temps (s)
Figure 64. Variation de vitesse des
générateurs.
Ces résultats confirment que le système est bien
évidemment stable aux petites perturbations.
Nous allons dans la suite de ce paragraphe comparer le
résultat obtenu par l'AG avec ceux déterminés :
- par une méthode classique,
- par une méthode métaheuristique,
- dans la littérature.
La méthode classique choisie est la
méthode de compensation de phase. Nous appliquons cette
méthode pour un réglage séquentiel des 14 PSSs,
localisés par la méthode des FP, sur la base des étapes
expliquées dans le paragraphe (§§-2.4.5.2.1). Le premier PSS
est réglé en utilisant le résultat de l'analyse des
valeurs propres en boucle ouverte. Les valeurs propres du système en
boucle fermée utilisant le premier PSS sont calculées et
utilisés dans le réglage du deuxième PSS. Cette
procédure s'applique pour les autres PSSs et, à chaque
étape de ce réglage séquentiel, le modèle du
système est mis à jour avec les PSSs ajoutés
précédemment. La figure (65) donne une représentation
graphique de cette procédure séquentielle.
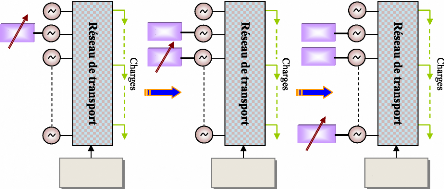
G2
G2
PSS1
PSS1
PSS1
G3
G3
PSS2
PSS2
G16
G16
PSS14
G1
Point de
fonctionnement
G1
G2
G3
G16
G1
Point de
fonctionnement
Point de
fonctionnement
Figure 65. Réglage
séquentiel des paramètres des PSSs.
Les valeurs des paramètres de réglage des PSSs
déterminés par cette méthode sont données en annexe
D.
Les valeurs propres du système, avec les 14 PSSs, sont
données dans le tableau (10) ; leur répartition dans le plan
complexe est montrée graphiquement à la figure (66).
Ces résultats montrent que le système est devenu
stable pour le point de fonctionnement étudié, mais plusieurs
modes ne se trouvent pas dans la zone D ; un mode
(ë14) reste encore mal amorti.
Ce résultat s'interprète en tenant compte du fait
que les méthodes classiques ne prennent pas en compte les interactions
entre PSSs et que leur réglage se fait sans coordination.
L'analyse comparative des résultats obtenus par ces
méthodes montre donc la supériorité de l'utilisation de
l'AG.
|
N° mode
|
ë
|
æ
|
f [Hz]
|
|
1
|
- 3.8969 #177; j 13.710
|
0.2734
|
2.1821
|
|
2
|
- 4.6589 #177; j 13.268
|
0.3313
|
2.1118
|
|
3
|
- 3.3208 #177; j 7.9161
|
0.3868
|
1.2599
|
|
4
|
- 0.2396 #177; j 7.1521
|
0.0335
|
1.1383
|
|
5
|
- 2.8883 #177; j 6.7292
|
0.3944
|
1.0710
|
|
6
|
- 1.1655 #177; j 6.7009
|
0.1714
|
1.0665
|
|
7
|
- 2.7053#177; j 6.5937
|
0.3796
|
1.0494
|
|
8
|
- 1.2536 #177; j 6.1625
|
0.1993
|
0.9808
|
|
9
|
- 1.6629 #177; j 6.5117
|
0.2474
|
1.0364
|
|
10
|
- 2.1114 #177; j 6.1520
|
0.3246
|
0.9791
|
|
11
|
- 1.8371 #177; j 6.1483
|
0.2863
|
0.9785
|
|
12
|
- 0.8886 #177; j 3.7589
|
0.2301
|
0.5982
|
|
13
|
- 0.6306 #177; j 3.6811
|
0.1688
|
0.5859
|
|
14
|
- 0.3772 #177; j 3.1160
|
0.1202
|
0.4959
|
|
15
|
- 0.7242#177; j 2.27830
|
0.3029
|
0.3626
|
Tableau 10. Valeurs propres du
système
(14 PSSs réglés par la méthode de
compensation de phase).
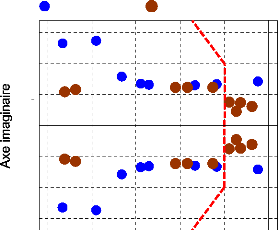
15
10
5
0
-5
-10
-15
dz = 10 %
Modes locaux Modes interrégionaux
-5 -4 -3 -2 - 0
-1
Axe réel
Figure 66. Répartition des valeurs
propres du système dans le plan complexe
(14 PSSs
réglés par la méthode de compensation de phase).
Les méthodes métaheuristiques d'optimisation
sont, comme nous l'avons déjà cité, nombreuses. Une de ces
méthodes est les algorithmes d'optimisation par essaim de particules,
(AOEP), (Particle Swarm Optimisation). Ces derniers ont été
introduits par Kennedy et Eberhart (Kennedy et al., 1995) en 1995. Ces
algorithmes sont une technique stochastique d'optimisation inspirés des
mouvements coordonnés des oiseaux en nuées ou des bancs de
poissons (Kennedy et al., 2001; Bonabeau et al., 2002). Les
AOEP, comme les algorithmes évolutionnaires, sont des méthodes
d'optimisation à population dont l'individu (particule)
représente une solution potentielle. Les AOEP partagent avec les AGs
plusieurs points communs tels que la génération aléatoire
de la population initiale et l'évolution des individus par
itérations en convergeant graduellement vers la solution optimale.
Chaque particule vole dans l'espace de recherche du
problème avec une vitesse adaptative qui se modifie dynamiquement selon
sa propre expérience du vol et l'expérience du vol des autres
particules. Ainsi, chaque particule essaie de s'améliorer en suivant le
chemin de son meilleur voisin. En outre, chaque particule possède une
mémoire qui lui permet de se rappeler de la meilleure position qu'elle
avait visitée dans l'espace de recherche. La position de la particule
correspondante à la meilleure performance est appelée
pbest et la meilleure position de toutes les particules est
appelée gbest.
L'évolution de la vitesse et la position de chaque
particule peuvent être calculées en utilisant les informations de
sa vitesse actuelle et de la distance entre sa position actuelle et les
positions pbesti et gbest, comme les donnent les relations
suivantes (Bonabeau et al., 2002; Kwang et al., 2008) :
|
v w v c rand pbest x c rand gbest x
k + 1 k k
= · + · · - + · · -
1 1 ( ) 2 2 (
k
i i i i i
|
) (145)
|
x x v k i np
k + = + + = K
1 1
k ; 1,2, , (146)
i i i
|
w w
= max
|
w w
max min
-
itermax
|
iter
|
(147)
|
Avec :
vi k : vitesse actuelle de la
ième particule à la
kème itération.
w : fonction de pondération.
c1, c2 : coefficients de pondération.
rand : nombre aléatoire entre 0 et 1.
xi k : position actuelle de la
ième particule à la
kème itération.
pbesti : pbest de la
ième particule. gbest : gbest de la
population.
np : nombre des particules dans la population.
wmax : poids maximum.
wmin : poids minimum.
iter : nombre actuel d'itérations. itermax
: nombre maximum d'itérations.
L'organigramme général des AOEP peut être
illustré comme suit :
Population initiale des particules
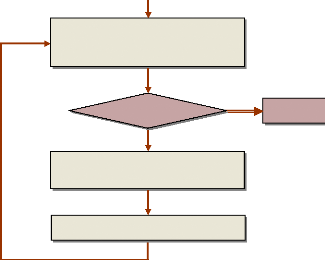
Résultat
Evaluation de la performance de
chaque particule dans
l'actuelle
itération
Non
Gener < Genermax ?
Oui
Modification de la vitesse et
de la position de chaque
particule
Nouvelle itération
Figure 67. Organigramme
général des AOEP.
Nous appliquons le programme d'AOEP que nous avons
développé pour optimiser les 14 PSSs du système. Nous
utilisons le même espace de recherche proposé pour l'optimisation
par l'AG (relation (144)). Les valeurs choisies des paramètres de l'AOEP
et les valeurs optimales des paramètres des PSSs sont données en
annexe E.
La figure (68) décrit l'évolution de la fonction
multiobjectif en fonction du nombre de générations ; la valeur de
la fonction multiobjectif atteinte est de 1.075.
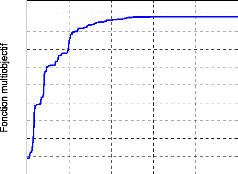
1.1
0.9
0.7
0.5
0.3
0 50 100 150 200 250
Générations
Figure 68. Evolution de la fonction
multiobjectif.
La répartition des valeurs propres du système est
donnée à la figure (69).
Modes locaux Modes interrégionaux


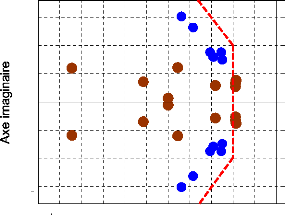
dz = 10 %
5
0
-5
-10
-15
-5 -4 -3 -2 -1 0
-1
15
10
Axe réel
Figure 69. Répartition des valeurs
propres du système dans le plan complexe
(14 PSSs optimisés
par AOEP).
L'analyse de ces valeurs montre que plusieurs d'entre elles se
trouvent hors de la zone D : le facteur d'amortissement minimum est
æmin = 14.32 % et la partie réelle maximale des valeurs
propres est ómax = - 0.93 17.
La comparaison avec les résultats obtenus par l'AG montre
que les résultats obtenus par l'AOEP sont inférieurs.
En effet, si les AOEP sont simples dans leur concept et
faciles à mettre en oeuvre par rapport à un AG car ils n'ont pas
d'opérateurs génétiques. Contrairement aux AGs, la
performance d'un AOEP dépend fortement de ses paramètres de
réglage. En outre, les AOEP risquent souvent d'être
piégés dans des optima locaux (Angeline, 1998; Xiao et
al., 2003).
Enfin, en ce qui concerne les résultats de la
littérature obtenus à l'aide des AGs, de nombreuses recherches
sur l'optimisation des paramètres des PSSs du réseau New
England/New York ont été effectuées. K. Hongesombut, par
exemple, a publié plusieurs articles (Hongesombut et al., 2001;
Hongesombut et al., 2002; Hongesombut et al., 2004;
Hongesombut et al., 2005) concernant ce problème. Dans la
référence (Hongesombut et al., 2005), les auteurs
présentent une méthode d'optimisation des PSSs utilisant une
combinaison entre un algorithme génétique hiérarchique et
un micro algorithme génétique parallèle.
Nous donnons ci-dessous les principes de ces deux algorithmes.
- Algorithme génétique hiérarchique (AGIT).
Dans un AG typique, la structure d'un chromosome est
prédéfinie et fixe ; le chromosome consistant en une chaîne
de gènes. Par contre, un chromosome d'un AGH est construit d'une
façon hiérarchique à partir de deux types
de gènes : les gènes de contrôle et les gènes de
paramètres. Les gènes de contrôle gouvernent l'état
d'activation des gènes de paramètres. Les autres gènes
sont responsables de l'optimisation des paramètres des PSSs.
- Micro algorithme génétique
parallèle (MAGP).
Lorsqu'on veut utiliser une population de petite taille, il y
a un risque que l'AG converge vers un optimum local. Ainsi, un AG typique peut
ne pas donner le résultat désiré avec une petite
population. Ceci est dû à l'insuffisance de diversité dans
le bassin de la population qui ne permet pas toujours d'éviter le
piège des optima locaux. Par contre, le MAGP se base sur l'utilisation
de multiples sous-populations. Ces dernières évoluent
indépendamment pour un certain nombre de générations.
Ensuite un processus de migration est appliqué en distribuant le
meilleur individu parmi les sous-populations. Le schéma de migration
fournit la diversité génétique demandée en
échangeant les informations entre les sous-populations.
Avec cette méthode, la stabilité globale du
système est assurée avec un facteur d'amortissement minimum
æmin = 15 % et une partie réelle maximale des valeurs
propres ómax = - 1. Ces résultats sont bien en accord
avec ceux que nous avons obtenus, mais avec un PSS de moins dans notre
étude (14 au lieu de 15 PSSs).
4.5.3.3.2- Les autres
scénarios.
Dans le paragraphe précédent, nous avons
examiné la performance de régulation pour le point de
fonctionnement nominal. Nous examinons ci-dessous cette performance
vis-à-vis des deux autres scénarios proposés.
Les représentations graphiques dans le plan complexe des
valeurs propres des deuxième et troisième scénarios sont
données respectivement à la figure (70).
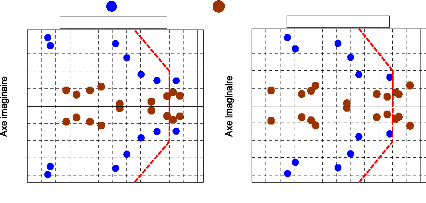
20
20
dz = 10 %
dz = 10 %
10
10
0
0
-10
-20
-6 -5 -4 -3 -2 - 0
-1
Axe réel
-10
-20
-6 -5 -4 -3 -2 - 0
-1
Axe réel
Modes locaux Modes interrégionaux
1er cas , 2ème scénario
1er cas , 3ème scénario
a b
Figure 70. Valeurs propres du
système pour le 1er cas,
a :
2ème scénario, b :
3ème scénario.
Les valeurs minimales de (æ) et maximales de
(ó) des deux scénarios sont données
respectivement comme suit :
|
æmin
|
ómax
|
|
Scénario 2
|
10.57 %
|
- 0.6284
|
|
Scénario 3
|
6.450 %
|
- 0.3743
|
Nous remarquons que la valeur critique du facteur
d'amortissement est bien respectée dans le deuxième
scénario mais pas pour le troisième, tandis que la valeur
critique de la partie réelle des valeurs propres n'est pas
respectée pour les deux autres scénarios. La figure (70) montre
que trois modes, pour chaque scénario, se trouvent en dehors de la zone
D de stabilité. Les caractéristiques correspondantes de
ces modes sont données dans le tableau suivant :
|
N° mode
|
ë
|
æ
|
f [Hz]
|
Type de mode
|
|
2ème
scénario
|
1
|
- 0.8603#177; j3.9143
|
0.2147
|
0.6230
|
Interrégional
|
|
2
|
0.6284#177; j 2.9158
|
0.2107
|
0.4641
|
Interrégional
|
|
3
|
- 0.7652#177; j 7.2000
|
0.1057
|
1.1459
|
Local
|
|
3ème
scénario
|
1
|
- 0.8820#177; j 3.7928
|
0.2265
|
0.603 6
|
Interrégional
|
|
2
|
0.7794#177; j 3.2443
|
0.2336
|
0.5163
|
Interrégional
|
|
3
|
- 0.3743#177; j 5.7897
|
0.0645
|
0.9212
|
Interrégional
|
Ce tableau montre que les modes se trouvant en dehors de la
zone D sont bien deux modes interrégionaux (le
3ème est local) pour le 2ème
scénario et trois modes pour le 3ème scénario. Par
conséquent, les modes interrégionaux sont les plus critiques.
4.5.3.4- Analyse par simulations temporelles.
4.5.3.4.1- Le point de fonctionnement nominal.
Pour compléter les informations sur les performances de
régulation obtenues avec le modèle linéaire, des
simulations temporelles du modèle non-linéaire sont, comme nous
l'avons expliqué au paragraphe (§§-4.3), nécessaires.
Nous devons ainsi examiner la restauration de la stabilité du
système pour les trois scénarios proposés suite à
un court-circuit triphasé sur la ligne 59#23. Nous traitons dans ce
paragraphe le point de fonctionnement nominal.
La figure (71) montre la variation de vitesse des cinq
générateurs les plus affectés par ce défaut. Ces
générateurs sont G.53, G.59, G.60, G.66 et G.68 ; ils
appartiennent à des régions différentes.
Les valeurs du dépassement maximum et du temps de
réponse mesurés sur ces courbes sont donnés dans le
tableau suivant.
|
G. 53
|
G. 59
|
G. 60
|
G. 66
|
G. 68
|
|
Dp
|
5.48×10-3
|
10.6×10-3
|
5.01×10-3
|
- 9.84×10-3
|
0.49×10-3
|
|
tr (s)
|
7
|
7
|
8
|
8
|
8
|
Ainsi, nous constatons que le système est stable et les
oscillations s'amortissent en moins de 10 secondes.
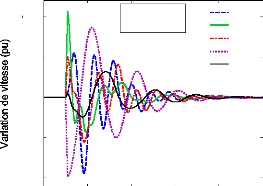
0.005
0.01
1er cas,
1er scénario
G. 53
G. 59
G. 60
G. 66
G. 68
0
-0.005
-0.01
0 2 4 6 8 10
Temps (s)
Figure 71. Variations de vitesse des cinq
générateurs suite à un défaut de
ligne,
(1er scénario du 1er cas).
D'autres grandeurs physiques peuvent aussi être
simulées tels les angles de rotor, les puissances électriques et
les tensions de noeuds.
Les réponses temporelles des angles de rotor, avec le
défaut proposé, sont montrées à la figure (72). Les
écarts entre les angles des générateurs 60 et 66 et les
écarts entre les angles des générateurs 68 et 53 sont
calculés à chaque instant : ils sont représentés
à la figure (73). Ces générateurs participent aux modes
interrégionaux ; appartenant à des régions
différentes, ils oscillent en opposition de phase comme l'illustre les
premières oscillations de la figure (73).
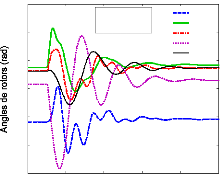
2.5
1.5
2
1er cas,
1er scénario
G. 53
G. 59
G. 60
G. 66
G. 68
1
0.5
0
-0.5 0 2 4 6 8 10
Temps (s)
Figure 72. Réponse dynamique des
angles de rotor des générateurs (1er scénario
du 1er cas).
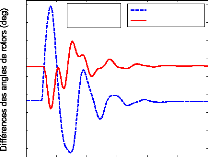
120
100
1er cas,
1er scénario
(G. 60 - G. 66)
(G. 68 - G. 53)
80
60
40
20
0
-20
-40
0 2 4 6 8 10 12
Temps (s)
Figure 73. Réponse dynamique des
écarts des angles de deux paires des
générateurs,
(1er scénario du 1er
cas).
Nous remarquons que l'écart des angles de chaque paire
converge généralement au bout de 8 secondes.
Les variations des angles des rotors influencent fortement les
puissances électriques des générateurs du système
ainsi que les tensions de noeuds. La figure (74) illustre la réponse
dynamique des puissances électriques des cinq générateurs
choisis et la réponse dynamique des tensions de quelques noeuds. Nous
avons choisi les noeuds de la ligne d'interconnexion 52#42, les noeuds de la
ligne 40#48 et le noeud 59 où le défaut était
appliqué.
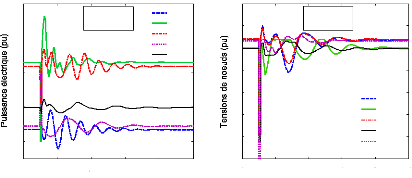
1.6
1.4
1.2
1er cas,
1er scénario
G. 53
G. 59
G. 60
G. 63
G. 66
1.2
1
1er cas,
1er scénario
0.8
0.8
0.6
0.4
0
0.4
0.2
Nd. 40 Nd. 42 Nd. 48 Nd. 52 Nd. 59
0 2 4 6 8 10
Temps (s)
00 2 4 6 8 10
Temps (s)
a b
Figure 74. Réponse dynamique du
système (1er scénario du 1er
cas),
a : puissances électriques, b
: tensions des noeuds.
Les courbes de ces deux figures confirment la restauration de
la stabilité du système lors d'un défaut de ligne, pour le
point de fonctionnement nominal. L'examen de la réponse dynamique du
système pour d'autres scénarios va être discuté dans
le paragraphe suivant.
4.5.3.4.2- Les autres
scénarios.
La figure (75) montre la variation de vitesse des cinq
générateurs pour les scénarios 2 et 3.
|
0 2 4 6 8 10 12
Temps (s)
|
0 2 4 6 8 10 12 14
Temps (s)
|
a b
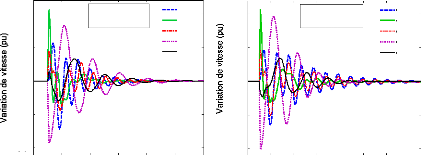
-0.005
0.005
-0.01
0.01
0
1er cas,
2ème scénario
G. 53
G. 59
G. 60
G. 66
G. 68
-0.005
0.005
-0.01
0.01
0
1er cas,
3ème scénario
G. 53
G. 59
G. 60
G. 66
G. 68
Figure 75. Variation de vitesse des
générateurs du 1er cas,
a :
2ème scénario, b :
3ème scénario.
Les informations obtenues concernant le dépassement
maximum et le temps de réponse du système pour les deux
scénarios sont données dans le tableau suivant.
|
|
G. 53
|
G. 59
|
G. 60
|
G. 66
|
G. 68
|
|
2ème
scénario
|
Dp
|
5.65×10-3
|
10.6×10-3
|
4.42×10-3
|
- 9.28×10-3
|
1.34×10-3
|
|
tr (s)
|
8
|
7
|
8
|
10
|
9
|
|
3ème
scénario
|
Dp
|
4.7×10-3
|
10.6×10-3
|
4.6×10-3
|
- 10.1×10-3
|
- 2.26×10-3
|
|
tr (s)
|
14
|
11
|
14
|
10
|
9
|
Nous remarquons sur ce tableau que certaines valeurs du
dépassement maximum sont plus importantes que pour le premier
scénario tandis que d'autres sont plus faibles. Par contre, les temps de
réponse des deuxième et troisième scénarios sont
toujours supérieurs ou égaux à ceux du premier
scénario ; les temps de réponse des générateurs 53
et 60 du troisième scénario sont doublés (ils
dépassent même les 10 secondes).
Enfin, pour compléter cette étude, nous donnons la
réponse dynamique des angles de rotor suite au défaut de ligne
pour les 2ème et 3ème scénarios,
figure (76).
4.5.3.5- Conclusion.
Dans l'étude du premier cas, nous avons utilisé
la méthode des facteurs de participation pour localiser les PSSs
nécessaires au système et la méthode des AGs pour
régler les paramètres de ces PSSs. Les résultats
trouvés pour le point de fonctionnement nominal montrent que le
réglage du système est efficace avec un bon amortissement pour
tous les modes. La performance du réglage a été
évaluée avec les modèles linéaire et
non-linéaire du système. Par ailleurs, nous trouvons que la
performance s'est dégradée pour les autres
scénarios, en particulier pour le troisième
scénario ; les critères liés à la zone de
stabilité et au temps de réponse étant "mal
respectés" pour plusieurs modes (notamment les interrégionaux).
La robustesse du réglage n'est donc pas suffisamment assurée.
Nous pouvons donc conclure que, bien que le programme d'AG
utilisé tienne compte des interactions entre les PSSs et réalise
un réglage coordonné en comblant ainsi les limites des
méthodes classiques, il reste à son tour handicapé par la
prédétermination des lieux d'installation des PSSs. Cela nous
amène à utiliser aussi l'AG dans le choix optimal de localisation
des PSSs.
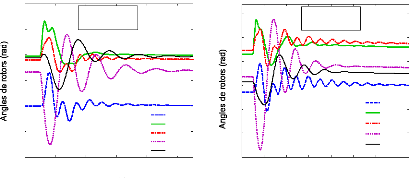
2.5
2
1er cas,
2ème scénario
2
1er cas,
3ème scénario
1.5
1.5
1
1
0.5
0.5
0
-0.5 0 2 4 6 8 10
Temps (s)
G. 53
G. 59
G. 60
G. 66
G. 68
-1 0 2 4 6 8 10 12 14
Temps (s)
0
-0.5
G. 53
G. 59
G. 60
G. 66
G. 68
a b
Figure 76. Réponse dynamique des
angles de rotor du 1er cas,
a :
2ème scénario, b :
3ème scénario.
4.5.4- Cas 2 : optimisation des paramètres et de
la localisation des PSSs. 4.5.4.1- Application des AGs.
Les méthodes de détermination classique de
l'emplacement des PSSs, tels les facteurs de participation, peuvent ne pas
garantir une performance efficace en termes d'amortissement d'oscillation, en
particulier, pour les modes interrégionaux où un grand nombre de
générateurs est souvent impliqué. En outre, ces
méthodes ne prennent pas en considération les éventuelles
interactions indésirables des PSSs.
Dans ce cas, nous allons considérer les lieux
d'emplacement, comme les paramètres de réglage des PSSs, comme
des variables à optimiser. Le nombre de PSSs à installer reste
constant et égal à celui déterminé par la
méthode des facteurs de participation, soit 14 PSSs.
Pour ce faire, nous appliquons la même fonction
multiobjectif donnée par la relation (141) et nous développons un
AG permettant d'introduire la localisation d'un PSS comme un paramètre
optimisable. Nous appliquons donc une optimisation simultanée de
localisation et des paramètres des PSSs.
La figure (77) donne une représentation graphique de cette
procédure d'optimisation cordonnée.
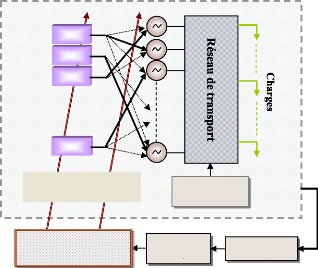
Algorithme Génétique
Paramètres
des PSSs
PSS 14
PSS 1
PSS 2
PSS 3
Placement
des PSSs
Fonction
multiobjectif
G16
G2
G3
G1
Point de
fonctionnement
Valeurs propres
Figure 77. Optimisation coordonnée de
localisation et des paramètres des PSSs.
Les quatre variables à optimiser pour chaque PSS
(l'emplacement, un gain et deux constantes de temps) sont soumises aux
contraintes suivantes :
0.1 45
= =
K PSS j
,
0 .00 1 0 . 1
= =
T 1 , j
0 .00 1 0 . 1
= =
T 3 , j
(148)
|
PLPSS
|
,
|
j
|
{ }
53, ,6 8
L
|
|
avec
|
j
|
1,2,
|
|
, NPSS
|
Les autres paramètres (Tw,j
et T2,j, T4,j) des PSSs sont considérés
constants : Tw,j = 10 et T2,j = T4,j = 0.02.
Le tableau (11) donne les valeurs choisies des paramètres
de l'AG.
|
Nombre d'individu Nind
|
100
|
|
Nombre de gènes Ngens
|
Nind x Nvar
|
|
Nombre de génération Ngener
|
300
|
|
Probabilité de croisement Pc
|
0.9
|
|
Probabilité de mutation Pm
|
0.005
|
Tableau 11. Valeurs choisies des
paramètres de l 'AG.
L'évolution de la fonction multiobjectif en fonction du
nombre de générations, donnée à la figure (78),
montre que sa valeur finale optimale est égale à 1.552.
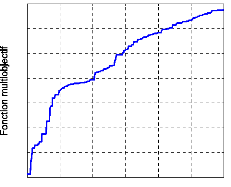
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2 0 50 100 150 200 250 300
Générations
Figure 78. Evolution de la fonction
multiobjectif.
Les résultats, donnés au tableau (12),
représentent les valeurs optimales de l'emplacement des PSSs et leurs
paramètres de réglage.
|
N° PSS
|
N° G.
|
KPSS
|
T1
|
T3
|
|
1
|
53
|
3 1.3445
|
0.0980
|
0.0985
|
|
2
|
54
|
44.3561
|
0.0881
|
0.0770
|
|
3
|
55
|
44.2500
|
0.08 12
|
0.0466
|
|
4
|
57
|
24.5247
|
0.0609
|
0.0784
|
|
5
|
58
|
07.8640
|
0.0398
|
0.0478
|
|
6
|
59
|
24.7385
|
0.0567
|
0.0654
|
|
7
|
61
|
16.0132
|
0.0729
|
0.0366
|
|
8
|
62
|
08.6426
|
0.0533
|
0.0742
|
|
9
|
63
|
04.8510
|
0.0632
|
0.0787
|
|
10
|
64
|
17.0964
|
0.0924
|
0.0237
|
|
11
|
65
|
43.8049
|
0.0026
|
0.0115
|
|
12
|
66
|
44.4671
|
0.0108
|
0.0034
|
|
13
|
67
|
44.7417
|
0.0204
|
0.0159
|
|
14
|
68
|
44.4898
|
0.0102
|
0.0054
|
Tableau 12. Paramètres et
localisation des PSSs optimisés par AG.
Nous allons dans la suite de ce paragraphe analyser la
performance et la robustesse du réglage des PSSs lors de la
linéarisation du modèle du système et lors de
l'utilisation du modèle non-linéaire.
4.5.4.2- Analyse des valeurs propres. 4.5.4.2.1- Le
point de fonctionnement nominal.
Pour calculer les valeurs propres du système au point
de fonctionnement nominal en boucle fermée, nous installons les 14 PSSs
optimisés aux emplacements déterminés par l'AG. Le tableau
(13) donne les valeurs propres dominantes ; leur répartition dans le
plan complexe est donnée à la figure (79).
|
N° mode
|
ë
|
æ
|
f [Hz]
|
|
1
|
- 6.7752 #177; j 11.413
|
0.5104
|
1.8166
|
|
2
|
- 2.2305 #177; j 10.556
|
0.2067
|
1.6801
|
|
3
|
- 6.9634 #177; j 8.6133
|
0.6287
|
1.3709
|
|
4
|
- 1.4778 #177; j 8.3524
|
0.1742
|
1.3293
|
|
5
|
- 2.7045 #177; j 8.2624
|
0.3111
|
1.3150
|
|
6
|
-1.6588 #177; j 7.4513
|
0.2173
|
1.1859
|
|
7
|
- 1.3803 #177; j 7.3761
|
0.1839
|
1.1739
|
|
8
|
- 1.3779 #177; j 7.2170
|
0.1875
|
1.1486
|
|
9
|
- 4.8218 #177; j 2.7800
|
0.8663
|
0.4425
|
|
10
|
- 2.0778 #177; j 2.6504
|
0.6170
|
0.4218
|
|
11
|
- 3.6124 #177; j 2.3486
|
0.8384
|
0.3738
|
|
12
|
- 1.3974 #177; j 3.9670
|
0.3322
|
0.6314
|
|
13
|
- 1.3777 #177; j 3.9719
|
0.3277
|
0.6321
|
|
14
|
- 2.7954 #177; j 6.1612
|
0.4132
|
0.9806
|
|
15
|
- 1.5958 #177; j 2.0264
|
0.6187
|
0.3225
|
Tableau 13. Valeurs propres du
système (14 PSSs localisés et optimisés par AG).
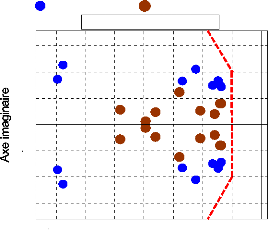
2ème cas , 1er scénario
dz = 10 %
5
0
-5
-10
-15
-7 -6 -5 -4 -3 -2 -1 0
-1
Modes locaux Modes interrégionaux
15
10
Axe réel
Figure 79. Répartition des valeurs
propres du système dans le plan complexe
(14 PSSs localisés et
optimisés par A G).
L'examen de ces valeurs propres montre que le facteur
d'amortissement minimum est æmin = 17.42 % et que la partie
réelle maximale des valeurs propres est ómax = - 1.3777.
Nous remarquons aussi que tous les modes, locaux et interrégionaux, sont
bien déplacés dans la zone D. Le facteur d'amortissement
et la partie réelle des valeurs propres des modes interrégionaux
sont notamment améliorés par rapport au premier cas. Nous
constatons donc une bonne amélioration de la stabilité globale du
système. Cette amélioration se traduit par des
améliorations sur le facteur d'amortissement minimum (de 16.1 % en
valeur relative) et sur la partie réelle maximale des valeurs propres
(de 45.18 % en valeur relative) par rapport au premier cas.
Pour s'assurer de cette amélioration dans tous les
scénarios probables, nous devons examiner, comme nous avons fait pour le
premier cas, les deux autres scénarios proposés.
4.5.4.2.2- Les autres
scénarios.
Les répartitions des valeurs propres dans le plan complexe
des deuxième et troisième scénarios sont données
respectivement à la figure (80).
Modes locaux Modes interrégionaux


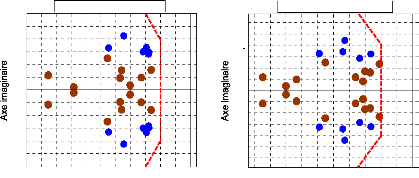
15
15
dz = 10 %
dz = 10 %
10
10
5
5
0
0
-5
-5
-10
-10
-15
-15
-5 -4 -3 -2 -1 0
-1
-5 -4 -3 -2 - 0
-1
2ème cas , 2ème scénario
2ème cas , 3ème scénario
Axe réel Axe réel
a b
Figure 80. Valeurs propres du
système pour le 2ème cas,
a :
2ème scénario, b :
3ème scénarios.
Les valeurs minimales de (æ) et maximales de
(ó) des deux scénarios sont données
respectivement comme suit :
|
æmin
|
ómax
|
|
Scénario 2
|
17.53 %
|
- 1.3076
|
|
Scénario 3
|
16.20 %
|
-1.0437
|
Sur ces deux figures, il est clair que tous les modes (locaux
et interrégionaux) associés aux deux scénarios se trouvent
placés dans la zone D ; les valeurs critiques de
(æi) et (ói) sont bien respectées avec
une marge très importante pour le facteur d'amortissement. Ces
valeurs
présentent une bonne amélioration des
performances par rapport au premier cas. Cela se traduit par une augmentation
de (æmin) de (65.8 % et 151.16 %) et une diminution
de (ómax) de (108.1 % et 178.8 %) pour les deux
scénarios respectivement.
Cette comparaison peut être illustrée graphiquement,
par rapport au premier scénario, par la figure suivante.
a b
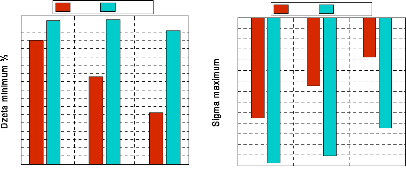
18
16
14
12
10
4
8
6
2
0
1er scénario 2ème scénario 3ème
scénario
1er cas 2ème cas
-0.2
-0.4
-0.6
-0.8
-1.2
-1.4
-1
0
1er scénario 2ème scénario 3ème
scénario
1er cas 2ème cas
Figure 81. Comparaison entre le
1er et le 2ème cas.
a : æmin, b
: ómax.
D'après cette figure, nous constatons que le
réglage du deuxième cas respecte les critères de la zone
D de stabilité pour les trois scénarios étudies
contrairement au premier cas qui ne la respectait que par le scénario du
point de fonctionnement nominal.
4.5.4.3- Analyse par simulations temporelles.
4.5.4.3.1- Le point de fonctionnement nominal.
Nous examinons dans ce paragraphe les simulations temporelles du
système non-linéaire au point de fonctionnement nominal pour le
même défaut appliqué au premier cas.
Le résultat de la variation de vitesse des cinq
générateurs est présenté à la figure
(82).
Pour mieux comparer ce résultat à son homologue
du premier cas, nous donnons dans les tableaux suivants le dépassement
maximum et le temps de réponse mesurés sur ces courbes, en
rappelant aussi ceux du premier cas.
|
2ème
cas
|
|
G. 53
|
G. 59
|
G. 60
|
G. 66
|
G. 68
|
|
Dp
|
5.42×10-3
|
10.7×10-3
|
5.01×10-3
|
- 9.85×10-3
|
0.49×10-3
|
|
tr (s)
|
5
|
5
|
8
|
4
|
4
|
|
1er
cas
|
|
G. 53
|
G. 59
|
G. 60
|
G. 66
|
G. 68
|
|
Dp
|
5.48×10-3
|
10.6×10-3
|
5.01×10-3
|
- 9.84×10-3
|
0.49×10-3
|
|
tr (s)
|
7
|
7
|
8
|
8
|
8
|
Nous constatons que les temps de réponse sont notamment
améliorés ; les oscillations de générateurs 66 et
68 par exemple s'amortissent deux fois plus rapidement que leurs
équivalentes au premier cas, les valeurs des dépassements restant
les mêmes.
Cette amélioration obtenue par le modèle
non-linéaire est en bon accord avec celle obtenue par le modèle
linéaire.
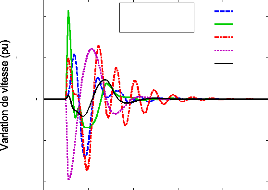
-0.005
0.005
-0.01
0.01
0
2ème cas,
1er scénario
G. 53
G. 59
G. 60
G. 66
G. 68
0 2 4 6 8 10
Temps (s)
Figure 82. Variations de vitesse des cinq
générateurs suite à un défaut de ligne,
(1er
scénario du 2ème cas).
Les réponses temporelles des angles de rotor et les
écarts entre les angles des générateurs 60 et 66 et entre
les angles des générateurs 68 et 53, donnés à la
figure (83), montrent bien la restauration rapide de la stabilité suite
au défaut et le bon amortissement obtenu.
Temps (s) Temps (s)
a b
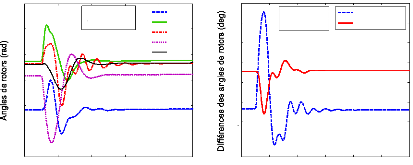
120
100
80
60
40
20
0
-20
0 2 4 6 8 10 12
-0.5 0 2 4 6 8 10
2.5
0.5
1.5
2
0
1
2ème cas,
1er scénario
G. 53
G. 59
G. 60
G. 66
G. 68
2ème cas,
1er scénario
(G. 60 - G. 66)
(G. 68 - G. 53)
Figure 83. Réponse dynamique des
générateurs (1er scénario du
2ème cas),
a : angles de rotor,
b : écart des angles de deux paires.
La réponse dynamique des puissances électriques des
cinq générateurs choisis et la réponse dynamique des
tensions de quelques noeuds sont présentées à la figure
(84).

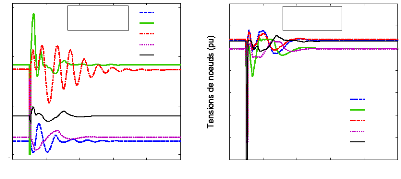
0.5
1.5
0
1
0 2 4 6 8 10
2ème cas,
1er scénario
Temps (s)
G. 53
G. 59
G. 60
G. 63
G. 66
0.8
0.6
0.4
0.2
1.4
1.2
0 0 2 4 6 8 10
Temps (s)
1
2ème cas,
1er scénario
Nd. 40 Nd. 42 Nd. 48 Nd. 52 Nd. 59
a b
Figure 84. Réponse dynamique du
système (1er scénario du 2ème
cas),
a : puissances électriques, b
: tensions des noeuds.
4.5.4.3.2- Les autres
scénarios.
Pour analyser la performance de régulation du
système lors de la restauration de la stabilité suite à un
défaut sévère, nous montrons tout d'abord la variation de
vitesse des cinq générateurs pour les deux scénarios,
figure (85).
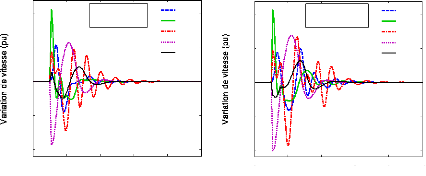
0.005
0.01
2ème cas,
2ème scénario
G. 53
G. 59
G. 60
G. 66
G. 68
0.005
0.01
2ème cas,
3ème scénario
G. 53
G. 59
G. 60
G. 66
G. 68
0
0
-0.005
-0.005
-0.01
0 2 4 6 8 10
Temps (s)
-0.01
0 2 4 6 8 10
Temps (s)
a b
Figure 85. Variation de vitesse des
générateurs du 2ème cas,
a
: 2ème scénario, b :
3ème scénario.
Nous donnons ensuite dans le tableau suivant le
dépassement maximum et le temps de réponse mesurés pour la
variation de vitesse.
|
|
G. 53
|
G. 59
|
G. 60
|
G. 66
|
G. 68
|
|
2ème
scénario
|
Dp
|
5.45×10-3
|
10.6×10-3
|
4.43×10-3
|
- 9.29×10-3
|
1.35×10-3
|
|
tr (s)
|
5
|
4
|
7
|
4
|
4
|
|
3ème
scénario
|
Dp
|
4.39×10-3
|
10.6×10-3
|
4.6×10-3
|
- 10.2×10-3
|
- 2.2×10-3
|
|
tr (s)
|
7
|
6
|
8
|
4
|
5
|
Nous comparons enfin les temps de réponse avec leurs
équivalents du premier cas, en tenant compte des trois scénarios
retenus. Nous représentons cette comparaison par la figure (86). La
figure (87), quant à elle, représente l'amélioration
apportée par l'utilisation de l'AG pour l'optimisation simultanée
des paramètres des PSSs et de leurs emplacements. L'amélioration
de temps de réponse a été évaluée, en
valeurs relatives exprimées en pourcent pour les cinq
générateurs choisis et dans les trois scénarios
étudiés.
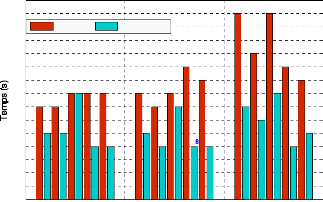
14
12
10
4
6
2
8
0
53
53
59
1er cas 2ème cas
59
606066
66
68
68
53
53
59
59
60
60
66
6
68
68
53
53
59
59
60
60
66
66
68
68
1er Scénario 2ème Scénario 3ème
Scénario
Figure 86. Temps de réponse des
trois scénarios (comparaison entre le 1er et le
2ème cas).
60%
50%
40%
30%
20%
10%
0%

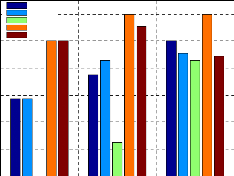
G. 53
G. 59
G. 60
G. 66
G. 68
1er Scénario 2ème Scénario 3ème
Scénario
Figure 87. Temps de réponse des
trois scénarios
(Comparaison des valeurs relatives entre le
1er et le 2ème cas).
Nous remarquons que le deuxième cas présente une
amélioration remarquable des temps de réponse quel que soit le
scénario ; cette amélioration atteint par exemple 60 % pour la
variation de vitesse de générateur 66 avec les deuxième et
troisième scénarios.
La figure (88) montre enfin la réponse dynamique des
angles de rotor suite au défaut de ligne pour les 2ème
et 3ème scénarios.
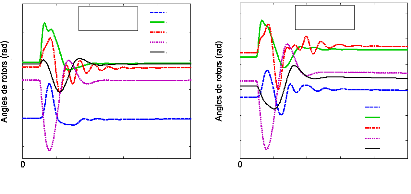
2 4 6 8 10
Temps (s)
2 4 6 8 10
Temps (s)
2.5
2
2ème cas,
2ème scénario
G. 53
G. 59
G. 60
G. 66
G. 68
1.5
2
2ème cas,
3ème scénario
1.5
1
1
0.5
0.5
0
-0.5
0
G. 53
G. 59
G. 60
G. 66
G. 68
a b
Figure 88. Réponse dynamique des
angles de rotor du 2ème cas,
a :
2ème scénario, b :
3ème scénario.
4.5.4.4- Discussion et conclusion.
La méthode des facteurs de participation a
montré que les générateurs 53 et 66 ne devraient pas
être équipés de PSSs. Pourtant, selon cette méthode,
le générateur 66 participe aux modes interrégionaux ; le
générateur 53 quant à lui ne présente aucune
participation importante aux modes du système.
Lorsque l'AG est utilisé pour trouver les
générateurs les plus appropriés pour installer des PSSs,
il prend en considération l'ensemble des propriétés des
PSSs (emplacement et paramètres). Il varie continuellement l'emplacement
et les valeurs de paramètres des PSSs en cherchant à trouver la
solution qui améliore au maximum la performance de tous les modes.
Lorsque l'AG trouve qu'un emplacement n'entraîne aucune
amélioration de la performance des modes ou a éventuellement une
influence négative, l'emplacement est abandonné.
L'AG a montré que tous les générateurs
responsables des modes interrégionaux (comme la méthode des
facteurs de participation a déterminé) nécessitent l'ajout
de PSSs, en particulier le générateur 66. Par contre, pour ceux
responsables des modes locaux, l'AG montre que deux d'entre eux n'ont pas
besoin de PSSs ; à savoir les générateurs 56 et 60.
La figure (89) montre la fréquence de sélection de
chaque générateur pour être doté d'un PSS pour 300
d'itérations d'AG.
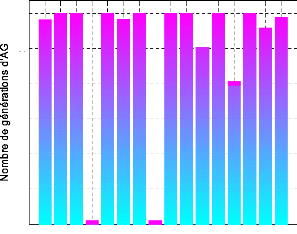
0
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
68
300
250
200
150
100
50
Numéro de générateur
Figure 89. Choix de chaque
générateur pour 300 d'itérations d'AG.
Il apparaît sur cette figure que les
générateurs 56 et 60 ne sont choisis que pendant quelques
itérations d'AG. Les générateurs 63 et 65 sont moins
choisis par rapport aux autres. La question qui se pose maintenant est la
suivante : l'AG peut-il être employé pour réduire le nombre
de PSSs en conservant seulement les PSSs les plus efficaces ???
4.5.5- Cas 3 : optimisation globale des PSSs. 4.5.5.1-
Application des AGs.
Généralement, lorsque les PSSs sont mal
réglés, ils peuvent produire des effets sévèrement
nuisibles au système de puissance. En outre, un ensemble de PSSs peut
donner des résultats médiocres quand son emplacement n'est pas
bien choisi. En conséquence, il est nécessaire de réduire
ces effets nuisibles en choisissant l'emplacement optimal des PSSs
simultanément avec un réglage coordonné et en employant
seulement le nombre nécessaire de PSSs.
Pour la réduction du nombre des PSSs, nous proposons la
procédure illustrée par la figure (90). Cette figure montre la
structure du programme de l'AG utilisé. Un commutateur branché en
série avec le PSS prend des variables "0 ou 1". Les variables
représentant ces commutateurs sont introduites dans le programme de l'AG
avec les autres variables des PSSs (ceux du deuxième cas). Ces
commutateurs permettent de relier (si la variable est 1) ou débrancher
(si la variable est 0) les PSSs des générateurs. Au cours du
calcul, lorsque la fonction multiobjectif ne varie pas de manière
significative à cause de la faible influence de certains PSS sur
l'amortissement du système, l'AG ne les prend pas alors en
considération.
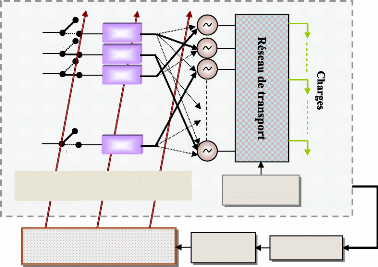
Interrupteurs
des PSSs
Algorithme Génétique
00
01
1
1
0
1
Paramètres
des PSSs
PSS 16
PSS 1
PSS 2
PSS 3
Placement
des PSSs
Fonction
multiobjectif
G16
G2
G3
G1
Point de
fonctionnement
Valeurs propres
Figure 90. Optimisation coordonnée de
localisation, des paramètres et du nombre des PSSs.
Les cinq variables à optimiser de chaque PSS (un
commutateur de PSS, un emplacement, un gain et deux constantes de temps) sont
soumises aux contraintes suivantes :
1 40
= =
K PSS j
,
0. 0 1 0 . 1
= =
T 1 , j
0. 0 1 0 . 1
= =
T 3 , j
{ }
5 3, ,6 8
L
{ }
0,1
PLPSS , j SWPSS ,j
(149)
j

1,2,
avec
, NPSS
Les autres paramètres (Tw,j
et T2,j, T4,j) des PSSs sont considérés
constants : Tw,j = 10 et T2,j = T4,j = 0.02.
Le tableau (14) donne les valeurs choisies des paramètres
de l'AG.
|
Nombre d'individu Nind
|
100
|
|
Nombre de gènes Ngens
|
Nind x Nvar
|
|
Nombre de génération Ngener
|
300
|
|
Probabilité de croisement Pc
|
0.7
|
|
Probabilité de mutation Pm
|
0.005
|
Tableau 14. Valeurs choisies des
paramètres de l'AG.
Nous avons trouvé que les meilleures performances des
paramètres obtenus par l'AG demandent l'utilisation de 12 PSSs
seulement.
Les valeurs des paramètres des PSSs optimisés sont
données dans le tableau (15).
|
N° PSS
|
N° G.
|
KPSS
|
T1
|
T3
|
|
1
|
53
|
21.5146
|
0.0926
|
0.0998
|
|
2
|
54
|
38.1806
|
0.0874
|
0.0225
|
|
3
|
55
|
39.1358
|
0.0978
|
0.0560
|
|
4
|
57
|
20.4600
|
0.0887
|
0.0562
|
|
5
|
58
|
23.9224
|
0.0639
|
0.0452
|
|
6
|
59
|
11.6205
|
0.0754
|
0.0160
|
|
7
|
61
|
39.2348
|
0.0297
|
0.0948
|
|
8
|
62
|
21.8183
|
0.0324
|
0.0411
|
|
9
|
64
|
18.8449
|
0.0423
|
0.0480
|
|
10
|
66
|
39.7833
|
0.0138
|
0.0174
|
|
11
|
67
|
39.2614
|
0.0147
|
0.0100
|
|
12
|
68
|
39.9553
|
0.0512
|
0.0395
|
Tableau 15. Paramètres et
localisation des PSSs optimisés par AG.
Ces valeurs représentent la meilleure solution atteinte
à la dernière génération ; elles correspondent
à la valeur finale de la fonction multiobjectif, soit 1.223.
L'évolution de la fonction multiobjectif en fonction du nombre de
générations est donnée à la figure (91).
0 50 100 150 200 250 300
Générations
Figure 91, Evolution de la fonction
multiobjectif.
Cette évolution de la fonction multiobjectif correspond
à l'évolution du nombre de PSSs au cours de l'exécution de
l'AG ; cette dernière évolution est illustrée par la
figure (92).
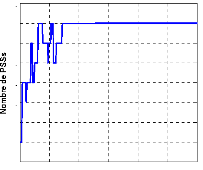
13
12
11
10
9
8
7
6
5
0 50 100 150 200 250 300
Nombre de génération
Figure 92. Convergence du nombre de
PSSs.
Comme nous avons fait avec les cas précédents,
nous devons analyser la performance et la robustesse du réglage des PSSs
pour le modèle linéaire du système et aussi pour son
modèle non-linéaire.
4.5.5.2- Analyse des valeurs propres. 4.5.5.2.1- Le
point de fonctionnement nominal.
En installant les 12 PSSs optimisés aux emplacements
déterminés par l'AG, nous pouvons calculer les valeurs propres du
système au point de fonctionnement nominal en boucle fermée. Le
tableau (16) donne certaines de ces valeurs propres. La figure (93) donne leurs
répartitions dans le plan complexe.
|
N° mode
|
ë
|
æ
|
f [Hz]
|
|
1
|
- 7.9207 #177; j 9.7480
|
0.6306
|
1.5514
|
|
2
|
- 2.1271 #177; j 10.888
|
0.1917
|
1.7329
|
|
3
|
- 1.4055 #177; j 9.8537
|
0.1412
|
1.5683
|
|
4
|
- 1.3155 #177; j 9.3297
|
0.1396
|
1.4849
|
|
5
|
- 1.6215 #177; j 8.4449
|
0.1886
|
1.3440
|
|
6
|
- 1.0859 #177; j 7.2412
|
0.1483
|
1.1525
|
|
7
|
- 1.8724 #177; j 7.0410
|
0.2570
|
1.1206
|
|
8
|
- 4.4445 #177; j 3.8309
|
0.7575
|
0.6097
|
|
9
|
- 7.2122 #177; j 4.7003
|
0.8378
|
0.7481
|
|
10
|
- 3.9322 #177; j 2.7953
|
0.8150
|
0.4449
|
|
11
|
- 2.6229 #177; j 3.0356
|
0.6538
|
0.4831
|
|
12
|
- 1.0934 #177; j 3.9569
|
0.2663
|
0.6298
|
|
13
|
- 1.0836 #177; j 2.7449
|
0.3672
|
0.4369
|
|
14
|
- 1.0862 #177; j 3.0984
|
0.3308
|
0.4931
|
|
15
|
- 1.6932 #177; j 3.3940
|
0.4464
|
0.5402
|
Tableau 16. Valeurs propres du
système (12 PSSs : optimisation globale par AG).
Modes locaux Modes interrégionaux


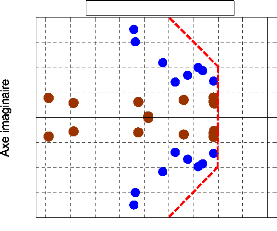
3ème cas , 1er scénario
20
dz = 10 %
10
0
-10
-4 -3 -2 -1 0
-1
-20
Axe réel
Figure 93. Répartition des valeurs
propres du système dans le plan complexe
(12 PSSs : optimisation
globale par AG).
L'installation de ces 12 PSSs dans le système permet
d'assurer la stabilité globale du système ; tous les modes,
locaux et interrégionaux, sont bien décalés dans la zone
D. Le facteur d'amortissement minimum est æmin = 13.96
% et la partie réelle maximale des valeurs propres est
ómax = - 1.0836. En comparant avec le premier cas, nous
remarquons que nous obtenons quasiment la même performance avec 12 PSSs
seulement qu'avec 14 PSSs. (Le facteur d'amortissement minimum est
diminué de 7 % tandis que la partie réelle maximale des valeurs
propres est améliorée de 14.2 %). En outre, le facteur
d'amortissement et la partie réelle des valeurs propres des modes
interrégionaux présentent une bonne amélioration par
rapport au premier cas.
4.5.5.2.2- Les autres
scénarios.
Nous avons vu que les 12 PSSs optimisés et
localisés par l'AG placent tous les modes du système dans la zone
D en cas de point de fonctionnement nominal. Quant aux deux autres
scénarios proposés, les répartitions des valeurs propres
associées dans le plan complexe sont données à la figure
(94).
Nous trouvons sur ces deux figures qu'il n'y a qu'un seul mode
hors de la zone D pour le deuxième scénario et deux
modes pour le troisième scénario. Pour l'un comme pour l'autre,
le critère de la partie réelle des valeurs propres n'est pas
respecté tandis que le critère du facteur d'amortissement reste
toujours respecté. Les caractéristiques générales
de ces modes critiques peuvent être données dans le tableau
suivant :
|
N° mode
|
ë
|
æ
|
f [Hz]
|
Type de mode
|
|
2ème
scénario
|
1
|
- 0.4202#177; j 2.9600
|
0.1543
|
0.4281
|
Interrégional
|
|
3ème
scénario
|
1
|
- 0.8968#177; j 6.6542
|
0.1336
|
1.0586
|
Local
|
|
2
|
0.9237#177; j 3.2530
|
0.2732
|
0.5177
|
Interrégional
|
Ce tableau montre que le seul mode critique du
2ème scénario est interrégional tandis qu'un
mode local et un autre interrégional sont associés au
3ème scénario.
Modes locaux Modes interrégionaux


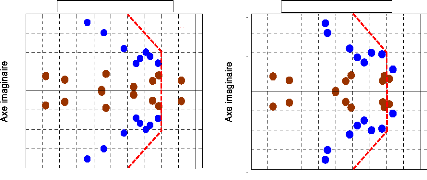
3ème cas , 3ème scénario
dz = 10 %
-4 -3 -2 -1 0
-1
3ème cas , 2ème scénario
20
dz = 10 %
10
0
-10
-4 -3 -2 -1 0
-1
-20
20
10
0
-10
-20
Axe réel Axe réel
a b
Figure 94. Valeurs propres du
système pour le 3ème cas,
a :
2ème scénario, b :
3ème scénarios.
Les valeurs minimales de (æ) et maximales de
(ó) des deux scénarios sont données ci- dessous
:
|
æmin
|
ómax
|
|
Scénario 2
|
14.51 %
|
- 0.4202
|
|
Scénario 3
|
11.77 %
|
- 0.8968
|
Nous comparons les variations relatives des valeurs critiques
de (æi) et (ói) de chaque scénario de ce
cas par rapport au premier cas. Cette comparaison est donnée dans le
tableau (17) et illustrée par la figure (95).
|
Äæmin %
|
Äómax %
|
|
Scénario 1
|
- 7 %
|
14.2 %
|
|
Scénario 2
|
37.27 %
|
- 33.13 %
|
|
Scénario 3
|
82.48 %
|
118.22 %
|
Tableau 17. Comparaison des variations
relatives de (æmin) et (ómax)
entre les 1er et 3ème cas.
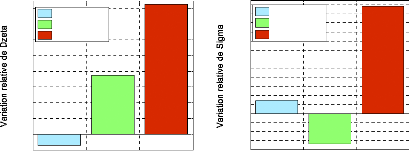
-10 %
40 %
20 %
80 %
60 %
0 %
1er scénario 2ème scénario 3ème
scénario
120 %
100 %
-20 %
-40 %
40 %
80 %
60 %
20 %
0 %
1er scénario 2ème scénario 3ème
scénario
a b
Figure 95. Comparaison des variations
relatives entre les 1er et 3ème cas,
a
: æmin, b : ómax.
Nous constatons donc qu'il y a une amélioration globale
sur la performance de régulation lors de l'utilisation de 12 PSSs
optimisés et localisés simultanément par l'AG par rapport
au premier cas utilisant 14 PSSs localisés par une méthode
classique et optimisés par l'AG.
4.5.5.3- Analyse par simulations temporelles.
4.5.5.3.1- Le point de fonctionnement nominal.
Pour continuer la vérification de la performance de
réglage, nous devons réaliser des simulations temporelles
adaptées du système non-linéaire. Nous considérons
dans ce paragraphe le système avec son point de fonctionnement nominal
soumis au défaut appliqué aux cas précédents.
Nous donnons en premier lieu le résultat de la variation
de vitesse des cinq générateurs ; il est présenté
à la figure (96).
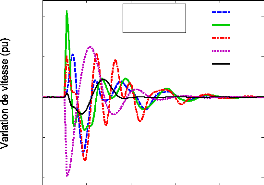
0.005
0.01
3ème cas,
1er scénario
G. 53
G. 59
G. 60
G. 66
G. 68
0
-0.005
-0.01
0 2 4 6 8 10
Temps (s)
Figure 96. Variations de vitesse des cinq
générateurs suite à un défaut de
ligne,
(1er scénario du 3ème
cas).
Les valeurs des dépassements maximums et des temps de
réponse sont données dans le tableau suivant.
|
G. 53
|
G. 59
|
G. 60
|
G. 66
|
G. 68
|
|
Dp
|
5.29×10-3
|
10.7×10-3
|
5.01×10-3
|
- 9.84×10-3
|
0.49×10-3
|
|
tr (s)
|
8
|
8
|
8
|
6
|
3
|
En comparant les valeurs de ce tableau avec les valeurs
équivalentes du premier cas, nous constatons que les temps de
réponse des générateurs 66 et 68 ont bien diminués
tandis que ceux des générateurs 53 et 59 ont
légèrement augmentés (de 1 seconde). Les
dépassements conservent les mêmes valeurs.
La figure (97) montre les réponses temporelles des
angles de rotor pour le défaut proposé et les écarts entre
les angles des générateurs 60 et 66 et entre les angles des
générateurs 68 et 53. Les oscillations interrégionales se
manifestent clairement sur l'écart angulaire des
générateurs appartenant à des régions
différentes. Nous pouvons bien voir que ces oscillations
interrégionales s'amortissent en respectant le critère de
performance désirée.
Temps (s) Temps (s)
a b
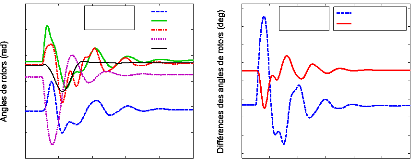
-0.5 0 2 4 6 8 10
2.5
0.5
1.5
2
0
1
3ème cas,
1er scénario
G. 53
G. 59
G. 60
G. 66
G. 68
120
100
-20
-40
40
80
60
20
0
0 2 4 6 8 10 12
3ème cas,
1er scénario
(G. 60 - G. 66)
(G. 68 - G. 53)
Figure 97. Réponse dynamique des
générateurs (1er scénario du
3ème cas),
a : angles de rotor,
b : écart des angles de deux paires.
La réponse dynamique des puissances électriques des
cinq générateurs choisis et la réponse dynamique des
tensions de quelques noeuds sont illustrées par la figure (98).
Ces simulations dynamiques montrent clairement que
malgré le nombre réduit des PSSs, l'optimisation globale par l'AG
permet au système de retrouver sa stabilité après quelques
secondes.
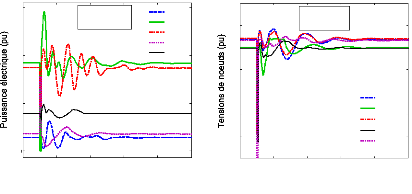
1.5
1
3ème cas,
1er scénario
G. 53
G. 59
G. 60
G. 63
G. 66
1.4
1.2
1
3ème cas,
1er scénario
0.8
0.5
0.6
0.4
0.2
Nd. 40 Nd. 42 Nd. 48 Nd. 52 Nd. 59
0
0 2 4 6 8 10
Temps (s)
0 0 2 4 6 8 10
Temps (s)
a b
Figure 98. Réponse dynamique du
système (1er scénario du 3ème
cas),
a : puissances électriques, b
: tensions des noeuds.
4.5.5.3.2- Les autres
scénarios.
Nous donnons aux figures (99) et (100) respectivement, la
réponse dynamique de la variation de vitesse des cinq
générateurs et la réponse dynamique des angles de rotor
pour les deux scénarios proposés.
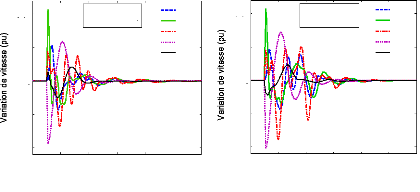
0.005
0.01
3ème cas,
2ème scénario
G. 53
G. 59
G. 60
G. 66
G. 68
0.005
0.01
3ème cas,
3ème scénario
G. 53
G. 59
G. 60
G. 66
G. 68
0
0
-0.005
-0.005
-0.01
0 2 4 6 8 10 12
Temps (s)
-0.01
0 2 4 6 8 10 12
Temps (s)
a b
Figure 99. Variation de vitesse des
générateurs du 3ème cas,
a
: 2ème scénario, b :
3ème scénario.
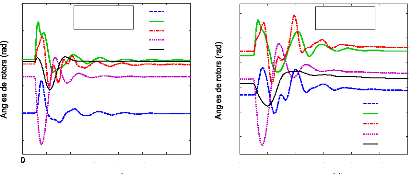
2 4 6 8 10 12 14
Temps (s)
0 2 4 6 8 10 12
Temps (s)
2.5
2
3ème cas,
2ème scénario
G. 53
G. 59
G. 60
G. 66
G. 68
1.5
2
3ème cas,
3ème scénario
1.5
1
1
0.5
0.5
0
-0.5
0
G. 53
G. 59
G. 60
G. 66
G. 68
a b
Figure 100. Réponse dynamique des
angles de rotor du 3ème cas,
a :
2ème scénario, b :
3ème scénario.
Suite au défaut proposé et comme nous l'avons
fait pour les cas précédents, nous caractérisons la
réponse dynamique du système par le calcul du dépassement
maximum et du temps de réponse des générateurs. Les
valeurs obtenues pour les deux scénarios sont données dans le
tableau suivant.
|
|
G. 53
|
G. 59
|
G. 60
|
G. 66
|
G. 68
|
|
2ème
scénario
|
Dp
|
5.39×10-3
|
10.7×10-3
|
4.43×10-3
|
- 9.28×10-3
|
1.34×10-3
|
|
tr (s)
|
9
|
9
|
10
|
7
|
4
|
|
3ème
scénario
|
Dp
|
4.6×10-3
|
10.7×10-3
|
4.6×10-3
|
- 10.2×10-3
|
- 2.19×10-3
|
|
tr (s)
|
8
|
8
|
9
|
7
|
6
|
Nous remarquons sur ce tableau qu'il y a
généralement une amélioration du temps de réponse
à scénarios équivalents par rapport au 1er cas. En outre,
il n'y a plus de temps de réponse dépassant les 10 secondes.
4.5.5.4- Evaluation du nombre de modes dans les trois
cas.
Dans la mise en oeuvre conventionnelle des PSSs, les
méthodes classiques d'emplacement (tels les facteurs de participation,
...) ne prennent pas en compte du changement de la participation des
générateurs dans l'évolution des modes en présence
des PSSs et des interactions indésirables entre ces PSSs. Par
conséquent, nous trouvons que la plupart des modes
électromécaniques dans les trois scénarios
étudiés (au 1er cas) sont de nature
interrégionale (70 % en moyenne, figure (101, a)).
Par contre l'optimisation simultanée des
paramètres et de l'emplacement des PSSs permet une diminution importante
du nombre des modes interrégionaux associés (40 % des modes
interrégionaux pour le 2ème cas et 55 % dans le
3ème cas, figure (101, b et c)).
Modes locaux
Modes interrégionaux
70 %
a
30 %
40 %
55 %
60 %
45 %
b c
Figure 101. Taux % des modes locaux et
interrégionaux,
(a : 1 er cas (14 PSSs),
b : 2ème cas (14 PSSs), c :
3ème cas (12 PSSs)). 4.5.5.5- Discussion et
conclusion.
Rappelons que la figure (89), correspondant au choix de
sélection de chaque générateur par itération d'AG,
montre bien que les générateurs 63 et 65 ont une faible
probabilité d'être choisis pour être dotés de PSSs
par rapport aux autres générateurs. Mais lorsqu'on laisse
à l'AG la possibilité de fixer le nombre de PSSs et de
sélectionner leurs emplacements les plus efficaces, nous trouvons alors
que ces deux générateurs sont éliminés de la liste
des PSSs. La figure (102) montre la fréquence de sélection de
chaque générateur pour être doté d'un PSS pour 300
d'itérations d'AG.
L'évaluation de la fonction multiobjectif a montré
que la valeur finale est plus grande que celle du premier cas.
L'analyse des valeurs propres et des simulations dynamiques
avec 12 PSSs a montré de son côté que certains
résultats sont proches de ceux trouvés dans le 1er cas
(14 PSSs), tandis que d'autres résultats sont meilleurs. En outre, le
nombre des modes interrégionaux critiques est diminué par rapport
au 1er cas.
Rappelons que dans le 1er cas, l'optimisation a
été réalisée en traitant de façon
indépendante la localisation des PSSs et leurs paramètres. Ainsi,
l'amélioration associée au 3ème cas est obtenue par
l'optimisation simultanée de la localisation des PSSs et de leurs
paramètres. Il est aussi important de remarquer que cette méthode
a permis également de diminuer le nombre de PSSs à installer.
Cela montre par conséquent la nécessité
de prendre en considération le lieu d'emplacement des PSSs lors de
l'optimisation de leurs paramètres. Cela montre en outre la
potentialité des AGs pour réduire le nombre des PSSs tout en
gardant une bonne performance de régulation.
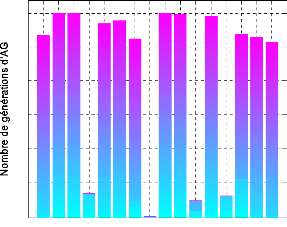
0
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67
68
300
250
200
150
100
50
Numéro de générateur
Figure 102. Choix de chaque
générateur pour 300 d'itération d'AG.
4.5.6- Influence des contraintes de l'AG dans
l'optimisation : application au troisième cas. 4.5.6.1- Application des
AGs.
Sachant qu'une des caractéristiques d'un AG est la
non-production d'une solution unique pour le problème donné, tout
changement d'une contrainte de l'espace de recherche du problème ou d'un
paramètre de l'AG mène à solution différente.
Pour tester la sensibilité de la solution aux contraintes
de l'AG, nous appliquons les contraintes suivantes pour chaque PSS :
1 50
= =
K PSS j
,
0 . 0 1 0 . 1
= =
T 1 , j
0 . 0 1 0 . 1
= =
T 3 , j
{ }
5 3, ,6 8
L
{ }
0,1
PLPSS , j SWPSS , j
(150)
Nous appliquons de même les paramètres suivants de
l'AG.
|
Nombre d'individu Nind
|
100
|
|
Nombre de gènes Ngens
|
Nind × Nvar
|
|
Nombre de génération Ngener
|
300
|
|
Probabilité de croisement Pc
|
0.9
|
|
Probabilité de mutation Pm
|
0.005
|
Tableau 18. Valeurs choisies des
paramètres de l'AG.
Grâce à ces nouvelles données, l'AG
réduit le nombre de PSSs à 11 PSSs seulement. Les valeurs de
leurs paramètres sont données dans le tableau (19).
|
N° PSS
|
N° G.
|
KPSS
|
T1
|
T3
|
|
1
|
53
|
30.2033
|
0.0509
|
0.0499
|
|
2
|
54
|
32.1232
|
0.0523
|
0.0879
|
|
3
|
55
|
36.0024
|
0.0974
|
0.0945
|
|
4
|
57
|
04.75 19
|
0.0996
|
0.0897
|
|
5
|
58
|
06.8476
|
0.0997
|
0.0998
|
|
6
|
61
|
44.8166
|
0.0997
|
0.0804
|
|
7
|
62
|
19.2244
|
0.0116
|
0.0466
|
|
8
|
64
|
19.9228
|
0.0724
|
0.0539
|
|
9
|
66
|
46.4253
|
0.0107
|
0.0105
|
|
10
|
67
|
41.1337
|
0.0511
|
0.0929
|
|
11
|
68
|
11.7644
|
0.0345
|
0.0145
|
Tableau 19. Paramètres et
localisation des PSSs optimisés par AG.
L'évolution de la fonction multiobjectif en fonction du
nombre de générations est donnée dans ce cas à la
figure (103). Au terme de l'optimisation, la valeur finale de la fonction
multiobjectif n'atteint que 0.9614.
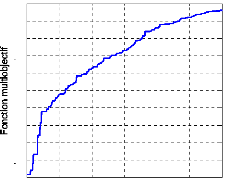
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0 0 50 100 150 200 250 300
Générations
Figure 103. Evolution de la fonction
multiobjectif.
La valeur finale de la fonction multiobjectif est
inférieure à un. Ceci nous indique que le critère de la
zone D ne sera pas assuré, même pour le point de
fonctionnement nominal. Ainsi, il faut accepter cette solution avec une
tolérance.
Nous allons dans ce qui suit analyser la performance de
régulation avec ces 11 PSSs pour le point de fonctionnement nominal
seulement car pour les autres scénarios, nous serions assez loin des
critères imposés dans cette étude.
4.5.6.2- Analyse des valeurs propres pour le point de
fonctionnement nominal.
Nous calculons les valeurs propres du système au point
de fonctionnement nominal en installant les 11 PSSs optimisés aux
emplacements déterminés par l'AG. Nous donnons dans le tableau
(20) certaines de ces valeurs propres. La figure (104) donne leurs
répartitions dans le plan complexe.
|
N° mode
|
ë
|
æ
|
f [Hz]
|
|
1
|
- 1.2324 #177; j 10.558
|
0.1159
|
1.6805
|
|
2
|
- 3.6757 #177; j 10.046
|
0.3436
|
1.5990
|
|
3
|
- 1.3897 #177; j 9.4513
|
0.1455
|
1.5042
|
|
4
|
- 1.0276 #177; j 9.3339
|
0.1094
|
1.4855
|
|
5
|
- 1.0514 #177; j 6.8663
|
0.1514
|
1.0928
|
|
6
|
- 0.8601 #177; j 7.7667
|
0.1101
|
1.2361
|
|
7
|
- 0.8629 #177; j 7.4791
|
0.1146
|
1.1903
|
|
8
|
- 2.0817 #177; j 7.5413
|
0.2661
|
1.2002
|
|
9
|
- 7.5208 #177; j 4.6996
|
0.8480
|
0.7480
|
|
10
|
- 2.1214 #177; j 3.1822
|
0.5547
|
0.5065
|
|
11
|
- 2.9320 #177; j 3.0255
|
0.6959
|
0.4815
|
|
12
|
- 0.8698 #177; j 3.9611
|
0.2145
|
0.6304
|
|
13
|
- 0. 8670 #177; j 3.7259
|
0.2266
|
0.5930
|
|
14
|
- 0.8519 #177; j 3.1696
|
0.2596
|
0.5045
|
|
15
|
- 0.9204 #177; j 2.5468
|
0.3399
|
0.4053
|
Tableau 20. Valeurs propres du
système (11 PSSs : optimisation globale par AG).
Modes locaux Modes interrégionaux


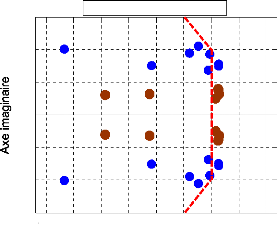
-10
-15
15
10
-5
5
0
-4 -3 -2 -1 0
-1
4ème cas , 1er scénario
dz = 10 %
Axe réel
Figure 104. Répartition des valeurs
propres du système dans le plan complexe
(11 PSSs : optimisation
globale par AG).
L'analyse des valeurs propres montre que le système se
trouve dans la zone de la stabilité. Pourtant, plusieurs modes sont
situés hors de la zone D, avec des parties réelles
supérieures à la valeur critique. Ceci ne donne pas une grande
sûreté de fonctionnement au système pour supporter des
scénarios sévères. Le facteur d'amortissement minimum est
æmin = 10.94 % et la partie réelle maximale des valeurs
propres est ómax = - 0.8519.
4.5.6.3- Analyse par simulations temporelles pour le
point de fonctionnement nominal.
La variation de vitesse des cinq générateurs
choisis pour montrer la réponse dynamique du système suite
à un défaut est donnée à la figure (105).

-0.005
0.005
-0.01
0.01
0
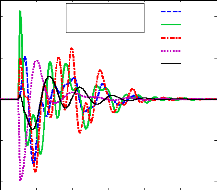
4ème cas,
1er scénario
G. 53
G. 59
G. 60
G. 66
G. 68
0 2 4 6 8 10 12
Temps (s)
Figure 105. Variations de vitesse des cinq
générateurs suite à un défaut de ligne,
(1er
scénario du 4ème cas).
Les valeurs caractérisant le dépassement maximum et
le temps de réponse de ces courbes sont données dans le tableau
suivant.
|
G. 53
|
G. 59
|
G. 60
|
G. 66
|
G. 68
|
|
Dp
|
5.13×10-3
|
10.7×10-3
|
5.01×10-3
|
- 9.84×10-3
|
0.49×10-3
|
|
tr (s)
|
8
|
10
|
10
|
8
|
8
|
Les réponses temporelles des angles de rotor avec le
défaut proposé et les écarts entre les angles des
générateurs (60 et 66) et (68 et 53) sont donnés
respectivement à la figure (106).
Ces analyses par simulations temporelles montrent bien que les
oscillations s'amortissent assez rapidement, au moins de 10 secondes. La
stabilité globale du système, pour ce scénario, est ainsi
assurée.
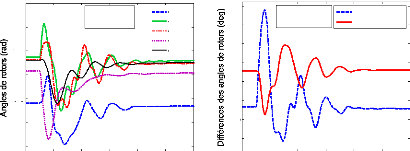
-0.5
2.5
0.5
1.5
2
0
1
4ème cas,
1er scénario
G. 53
G. 59
G. 60
G. 66
G. 68
120
100
-20
40
20
80
60
0
4ème cas,
1er scénario
(G. 60 - G. 66)
(G. 68 - G. 53)
0 2 4 6 8 10 12
Temps (s)
0 2 4 6 8 10 12
Temps (s)
a b
Figure 106. Réponse dynamique des
générateurs (1er scénario du
4ème cas),
a : angles de rotor,
b : écart des angles de deux paires.
4.5.6.4- Discussion et conclusion.
D'un point de vue général, le fait de disposer
d'un ensemble de solutions est une source de richesse permettant au concepteur
de bénéficier d'une base solide pour choisir, a
posteriori, une solution parmi celles proposées, ou pour parfaire
la conception. La multiplicité des solutions favorise également
l'identification des zones optimales les plus intéressantes (ou les
moins contraignantes) pour certains éléments du système ou
certains critères particuliers non- intégrés au
problème d'optimisation tels le coût, ... .
Dans notre cas, la solution que nous avons obtenue avec 11
PSSs présente un côté positif d'un point de vue
économique (par la réduction de leur nombre) et un
côté négatif par un manque de robustesse (par le
non-respect des critères de stabilité). Dans le cas des PSS, le
coût des ces derniers ne représente pas un enjeu critique. Par
contre la priorité essentielle concerne la stabilité du
système pour le plus grand nombre possible des scénarios. Ainsi,
la zone de la robustesse étant la plus importante, la solution des 11
PSSs doit être moins favorisée.
4.6- Conclusion.
Les études menées au cours de ce chapitre ont
permis de mettre en évidence les avantages de notre approche, celle-ci
permettant d'améliorer simultanément l'amortissement des modes
des oscillations électromécaniques globales et locales par une
optimisation globale des PSSs.
Quatre cas ont été étudiés.
Dans le 1 er cas, nous avons utilisé la
méthode des facteurs de participation pour localiser les PSSs
nécessaires au système et la méthode des AGs a
été utilisée pour régler les paramètres de
ces PSSs. Nous avons comparé les résultats obtenus, pour le point
de fonctionnement nominal, avec ceux issus d'une méthode d'optimisation
classique (la méthode de compensation de phase) et d'une méthode
métaheuristique (algorithme d'optimisation par essaim de particules) et
les résultats de la littérature. Les résultats obtenus
avec notre méthode d'AG montrent que la performance du réglage du
système est efficace, avec un bon
amortissement pour tous les modes. Par ailleurs, nous avons
remarqué que la performance s'est dégradée pour les autres
scénarios (défauts sévères). La robustesse du
réglage n'est donc pas suffisamment assurée dans ce cas.
Dans le 2ème cas, nous avons
déterminé en outre l'emplacement des PSSs par l'AG, le nombre des
PSSs utilisé étant préfixé. L'analyse des
résultats obtenus montre la supériorité de cette approche
par rapport à la méthode classique des facteurs de participation.
Nous avons obtenu des performances qui améliorent, par exemple, de 40 %
les temps de réponse des générateurs pour tous les
scénarios étudiés. Quant à l'amortissement de tous
les modes interrégionaux, il est notablement augmenté.
Dans le 3ème cas, nous avons axé
notre recherche sur l'optimisation du nombre des PSSs. Nous avons
considéré que ce paramètre est très important pour
minimiser les interactions nuisibles entre PSSs. Nous avons ainsi
développé l'approche correspondante. Les résultats obtenus
montrent que la stabilité globale du système est garantie. Le
nombre de modes interrégionaux critiques est diminué par rapport
au 1er cas malgré la réduction du nombre de PSSs (12
PSSs contre 14).
Dans le 4ème cas, nous avons
évalué la sensibilité des AGs vis-à-vis des
paramètres de réglage telles la probabilité de croisement
et les contraintes de l'espace de recherche. La "désensibilisation" de
l'AG par rapport aux contraintes de l'espace de recherche du problème
étudié fera l'objet du chapitre suivant.
Enfin nous pouvons conclure qu'outre l'optimisation
coordonnée des paramètres des PSSs souvent appliquée dans
le réglage des PSSs, il faut aussi tenir compte du nombre et de la
localisation optimale de ces PSSs pour pouvoir réduire au maximum les
effets indésirables des interactions entre PSSs. La stabilité
globale du système peut alors être correctement assurée par
une optimisation simultanée des paramètres et de leur emplacement
avec un nombre réduit de PSSs.
Chapitre V
Optimisation par
algorithmes génétiques
à
contraintes dynamiques
5.1- Introduction.

x
Dans la littérature, plusieurs méthodes sont
proposées pour améliorer la performance des AGs, dans la
recherche de l'optimum global, telles les méthodes des opérateurs
génétiques auto-adaptatifs (Bäck, 1992; Angeline, 1995; Deb,
1999; Régnier, 2003), la parallelisation des AGs (Alba et al.,
1999; Tomassini, 1999; Hongesombut et al., 2005), ... . Ces
méthodes présentent de bons résultats, mais si le point
optimal global cherché ne se trouve pas dans l'espace de recherche
proposé du problème (figure (107)), ces méthodes ne
permettent pas aux AGs de trouver ce point.
f(x)
OG
xmin xmax
Figure 107. Problème d'optimum
global situé en dehors de l'espace de recherche proposé.
Le bon déroulement d'un programme d'AG dépend de
la détermination de l'espace de recherche, borné par une valeur
maximale et minimale, associées à chaque paramètre
à optimiser.
L'espace de recherche du problème définissant un
ensemble des solutions potentielles peut ainsi contenir la solution optimale
globale et/ou d'autres solutions locales. Ainsi, pour l'obtention de l'optimum
global, il est alors très important de bien déterminer cet espace
de recherche, autrement dit il faut bien choisir ses contraintes.
Dans la plupart des problèmes d'optimisation, il n'y a
pas de critères rigoureux pour déterminer
précisément les contraintes de l'espace de recherche. Dans la
pratique, le choix de ces contraintes reste ainsi arbitraire.
Lors de l'optimisation de problèmes à grand
nombre de paramètres tels les PSSs, il est souvent très difficile
de déterminer pour des paramètres de même type (constantes
de temps, gains, ....) des espaces de recherche différents. Ainsi, ces
espaces de recherche sont généralement fixés par
l'expérience et le savoir faire ; ils ont souvent des valeurs
identiques. Ces espaces restent enfin fixes tout au long du processus
d'optimisation. Ainsi, la valeur d'un paramètre peut atteindre une des
limites de l'espace de recherche associé. Le fait d'atteindre cette
limite peut arriver après un certain nombre de générations
ou même dès le début de l'optimisation. Par
conséquent, l'évolution de la fonction objectif peut se
décélérer, voire se stabiliser, bien avant de converger
vers la solution optimale.
Une solution peut être proposée pour
améliorer la convergence de l'algorithme et la qualité de la
solution optimale recherchée. Cette solution est basée sur la
libération des contraintes de l'espace de recherche au cours de
l'application de l'AG qui permet de leur donner des valeurs différentes
selon les besoins du processus d'optimisation. Nous permettons ainsi à
l'AG de diversifier sa population par de nouvelles valeurs qui n'étaient
pas accessibles avec un espace de recherche fixe. Nous réalisons donc un
espace de recherche dynamique qui s'adapte à la recherche de l'optimum
global.
Nous allons dans ce chapitre appliquer cette approche à
l'optimisation des PSSs. 5.2- Approche proposée.
Rappelons que la forme générale d'un
problème d'optimisation (maximisation) est :
max( ( )) : R ? R (151)
F X n k
X S
?
· { } n
X = x 1 , x 2 ,
L , x n ? R : vecteur des paramètres à optimiser de
dimension n.
· { } k
F = f 1 , f 2 ,
L , fn ? R : fonction objectif de dimension n.
Pour k = 1, le problème est dit monoobjectif, autrement il est
multiobjectif.
· n
S ? R : espace de recherche du problème a des
contraintes aux limites. Les points de cet espace de recherche doivent
correspondre à des solutions réalisables. Les contraintes
définissants ses limites peuvent être données par des
valeurs minimales xi,min et maximales xi,max
associées à chaque paramètre à optimiser :
x i x i x i i { n}
,mi n ,max : 1,2 ,
= = = L(152)
Les figures (108) et (109) donnent respectivement le principe
général et l'organigramme de l'approche proposée. Dans
cette approche, nous initialisons l'AG avec un espace de recherche fixe.
Lorsque l'évolution de la fonction objectif ne s'améliore plus de
façon significative, nous utilisons alors des contraintes dynamiques sur
l'espace de recherche. Une marge de tolérance
(åm, ån) est fixée
pour chacune des deux extrémités de l'espace de recherche.
Lorsque la valeur d'un paramètre atteint cette marge pendant un certain
nombre de générations successives (Ng), les limites
associées à l'espace de recherche de ce paramètre vont
être modifiées par des valeurs prédéterminées
(Äm, Än). L'espace de
recherche du paramètre se déplacera en gardant toujours sa taille
initiale. Ce processus peut se répéter plusieurs fois au cours de
l'optimisation. Enfin, pour que les valeurs attribuées aux
paramètres soient des solutions réalisables (valeurs positives
dans notre cas), il faut limiter l'évolution des valeurs minimales de
l'espace de recherche à une valeur faible (åp
> 0).
An
An
An
An
xmin xmax
åm
xmax
0
xmin
ån
x
x
xmin
xmax
ån
åm
Am
Am
Am
Am
Figure 108. Le principe
général de l'approche des contraintes dynamiques.

Pour i = 1 : Nvar

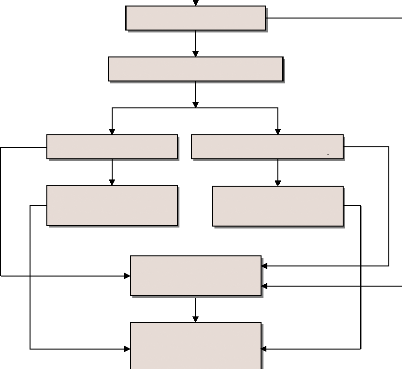
Non
xi,max = xi,max +
Äm
xi,min = xi,min +
Äm
Si xi > xi,max -
åm
Oui
Opérateurs d'AG
Si Gener > = Nd
Pour j = 1 : Ng
xi,max = xi,max
xi,min =
xi,min
Si xi < xi,min -
ån & xi > åp
Oui
xi,min = xi,min -
Än
xi,max = xi,max -
Än
Oui
Non
Non
Figure 109. Organigramme de l'approche des
contraintes dynamiques. 5.3- Première
application.
Nous appliquons l'approche au premier cas étudié
dans le chapitre précédent. 5.3.1- Optimisations par
contraintes fixes.
Les espaces de recherche utilisés dans l'optimisation
des PSSs disposent des contraintes fixes tout au long du processus
d'optimisation. Ces espaces de recherche (pour les trois paramètres
(KPSS,i, T1,i, T3,i) à
optimiser par PSS) sont soumis aux contraintes données par la relation
(144). Les valeurs choisies des paramètres de l'AG sont donnés au
tableau (7).
L'évolution de la fonction multiobjectif en fonction du
nombre de générations a été déjà
donnée à la figure (61). Nous remarquons que la valeur finale de
la fonction multiobjectif, atteinte pour la génération maximale
prédéterminée de 250, est de 1.097.
La figure (110) montre la variation, pour chaque
génération de l'AG, des valeurs des trois paramètres
choisis (KPSS (13), T1 (14), T3 (9)).
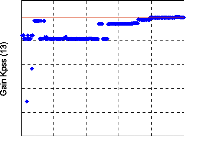
40
39
38
37
36
35
0 50 100 150 200 250
a
Génération
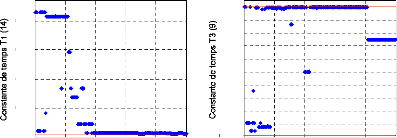
0.1
0.08
0.06
0.04
0.02
0.001
0.04
0.03
0.02
0.01
0.001
0 50 100 150 200 250
Génération 0 50 100 150 200 250
Génération
b c
Figure 110. Variation des valeurs des
trois paramètres (a : KPSS (13), b :
T1 (14), c : T3 (9)).
Sur cette figure, nous pouvons remarquer les points suivants :
- Le gain du 1 3ème PSS converge, à
partir de la 1 80ème génération, vers une
valeur très proche de la limite maximale de l'espace de recherche
associé.
- La constante de temps T1 du 14ème
PSS converge, à partir de la 100ème
génération, vers une valeur très proche de la limite
minimale de l'espace de recherche associé.
- La constante de temps T3 du 9ème
PSS atteint dès la 40ème génération une
valeur très proche de la limite maximale de l'espace de recherche
associé. Au-delà de la 200ème
génération, elle atteint une autre valeur située loin des
limites de l'espace de recherche.
Rappelons que la répartition des modes
électromécaniques du système dans le plan complexe,
donnée à la figure (63), montre que tous les modes
électromécaniques, sauf deux d'entre eux, sont
déplacés dans la zone D de stabilité ; le facteur
d'amortissement minimum est æmin = 15.02 % et la partie
réelle maximale des valeurs propres est ómax = -
0.9485.
5.3.2- Optimisations par contraintes
dynamiques.
Nous appliquons maintenant l'approche proposée pour
optimiser les paramètres des 14 PSSs, avec des espaces de recherche
modifiables tout au long du processus d'optimisation.
Les contraintes initiales des espaces de recherche et les valeurs
choisies des paramètres de l'AG sont les mêmes que
précédemment (relation (144) et tableau (7) respectivement).
Sur la figure (61), nous remarquons que l'évolution de
la fonction multiobjectif s'arrête généralement de
s'améliorer d'une façon significative à partir de la
75ème génération. Nous pouvons donc
considérer que cette génération (Nd = 75) est le
point de départ des contraintes dynamiques.
Les marges de tolérance (åm,
ån) des deux extrémités de l'espace de
recherche de chaque paramètre sont choisies comme suit :
( ) 1 , ( ) 0 . 05
K K
PSS i n PSS i
, ,
å m
= =
å
|
å m
|
( ) 0 .0 1 , ( )
T T
1 , 1 ,
i n i
= å
|
0.0005
|
(153)
|
å m (T3
, 1 ,
i n i
) 0. 0 1 , ( ) 0 . 0005
= =
å T
Le nombre des générations successives
nécessaire pour permettre aux contraintes de changer leurs valeurs est
déterminé à Ng = 50.
Les valeurs de changement possible des contraintes
(Äm, Än) sont choisies, quant
à elles, comme suit :
Äm
( ) 2 , ( ) 0 . 05
K K
PSS i n PSS i
, ,
= Ä =
|
Äm
|
( ) 0 . 0 1 , ( )
T T
1 , 1 ,
i n i
= Ä
|
0.0005
|
(154)
|
Äm (T3
, 1,
i n i
) 0. 0 1 , ( ) 0 . 0005
= Ä =
T
L'évolution de la fonction multiobjectif en fonction du
nombre de générations est donnée à la figure
(111).
0 50 100 150 200 250
Generations
Figure 111. Evolution de la fonction
multiobjectif.
Sur cette figure, nous constatons que la fonction
multiobjectif atteint une valeur égale à la valeur finale du cas
précédent, soit 1.097, pour la génération 120.
Ensuite, elle atteint la valeur de 1.234 pour la génération
maximale prédéterminée de 250. Ainsi, par rapport au cas
précédent, la convergence est assurée en moins de 130
générations. Au bout de 250 générations, nous
obtenons un gain de 12,4 %.
Les valeurs optimales des paramètres des PSSs sont
données au tableau (21).
|
N° PSS
|
N° G.
|
KPSS
|
T1
|
T3
|
|
1
|
54
|
37.7248
|
0.0790
|
0.0452
|
|
2
|
55
|
23.4329
|
0.0238
|
0.0441
|
|
3
|
56
|
33.6390
|
0.0637
|
0.0462
|
|
4
|
57
|
32.2578
|
0.0673
|
0.0460
|
|
5
|
58
|
38.3750
|
0.0608
|
0.0850
|
|
6
|
59
|
23.0859
|
0.0851
|
0.0809
|
|
7
|
60
|
01.5685
|
0.0862
|
0.0812
|
|
8
|
61
|
12.6048
|
0.0098
|
0.0293
|
|
9
|
62
|
10.4482
|
0.0398
|
0.1051
|
|
10
|
63
|
14.6773
|
0.0511
|
0.0755
|
|
11
|
64
|
23.7698
|
0.0552
|
0.1231
|
|
12
|
65
|
16.5094
|
0.0039
|
0.0143
|
|
13
|
67
|
43.8539
|
0.0090
|
0.0081
|
|
14
|
68
|
34.4827
|
0.0048
|
0.0003
|
Tableau 21. Paramètres des PSSs
optimisés par AG à contraintes dynamiques. Les valeurs des
paramètres fixés des PSSs sont les mêmes que le cas
précédent : Tw,j = 10 et T2,j = T4,j =
0.02.
Pour montrer l'évolution des valeurs des
paramètres des PSSs lors de l'optimisation, nous donnons à la
figure (112) la variation des trois paramètres les plus
représentatifs (KPSS (13), T3 (9),
T3 (14)) pour chaque génération d'AG.
Sur cette figure, nous pouvons remarquer les points suivants :
- Le gain du 13ème PSS prend, à partir
de la 75ème génération, de nouvelles valeurs
plus
élevées que la limite maximale initiale. La valeur
finale atteinte est de 43.853.
- La constante de temps T3 du 9ème
PSS dépasse aussi sa limite maximale initiale. Sa
valeur optimale est de 0.1231.
- La constante de temps T3 du 14ème
PSS atteint, à partir de la 120ème
génération, une valeur très proche de sa limite minimale
initiale. Ensuite, elle prend des valeurs inférieures à cette
limite. Elle atteint au bout de l'optimisation la valeur 0.0003.
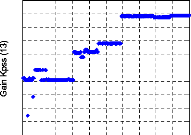
44
42
40
38
36
a
0 50 100 150 200 250
Génération
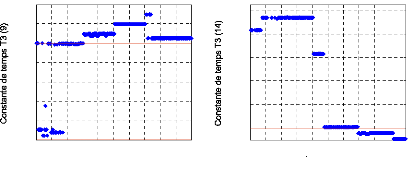
0.001
0 50 100 150 200 250
Génération
0 50 100 150 200 250
Génération
0.14
0.011
0.12
0.009
0.1
0.08
0.007
0.06
0.005
0.04
0.003
0.02
0.001
b c
Figure 112. Variation des valeurs des trois
paramètres (a : KPSS (13), b : T3
(9), c : T3 (14)).
Un indice intéressant, défini par la relation
suivante (Wood, 2006), permet de comparer les deux résultats. Il s'agit
du rendement ç de la valeur optimale de la fonction
multiobjectif (Fobjmax) pour la génération courante
itr :
Fobj itr
ç (155)
= ( max ) · 100 %
itr
Nous pouvons ainsi tracer l'évolution de ce rendement
pour les deux résultats (optimisation par contraintes fixes et
dynamiques), figure (113). L'analyse de cette figure montre qu'au-delà
de la 150ème génération, le rendement est quasi
linéaire. Un gain de 25 générations est constaté
pour une valeur fixée du rendement.
Pour évaluer la performance du réglage des PSSs
sur le système étudié, nous montrons par la figure (114)
la répartition des modes électromécaniques du
système dans le plan complexe. Tous les modes
électromécaniques sont bien déplacés dans la zone
D de stabilité ; cela traduit bien l'amélioration
réalisée sur l'optimisation de la fonction multiobjectf. Le
facteur d'amortissement minimum est æmin = 14.82 % et la partie
réelle maximale des valeurs propres est ómax = -
1.085.
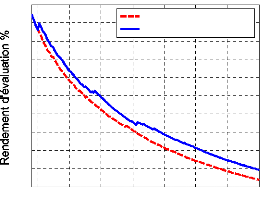
0.4
75 100 125 150 175 200 225 250
1.4
Contraintes fixes Contraintes dynamiques
1.2
1
0.8
0.6
Génération
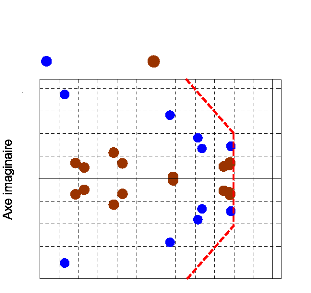
Figure 113. Evolution du rendement de la
fonction multiobjectif.
Modes locaux Modes interrégionaux
20
dz = 10 %
10
0
-10
-20
-6 -5 -4 -3 -2 - 0
-1
Axe réel
Figure 114. Valeurs propres du
système.
Les résultats obtenus montrent que l'approche
proposée a élargi l'espace de recherche initial de certains
paramètres. En prenant maintenant un espace de recherche initial aussi
étendu que celui obtenu par l'approche à contraintes dynamiques,
nous vérifions son évolution par l'AG à contraintes fixes.
Nous appliquons ainsi les contraintes fixes suivantes :
|
0.1 45
= =
K PSS j
,
0.0005 0 . 1 3
= =
T 1 , j
0.0005 0 . 1 3
= =
T 3 , j
|
(156)
|
|
avec
|
j
|
1,2,
|
|
, NPSS
|
L'évolution de la fonction multiobjectif correspondante
en fonction du nombre de générations, (figure (115)), montre que
la valeur atteinte au bout de l'optimisation est égale seulement
à 0.984. Par conséquent, nous trouvons que ce résultat est
inférieur à celui obtenu par l'optimisation à contraintes
dynamiques. En effet, le fait d'élargir l'espace de recherche de tous
les paramètres du problème restreint la recherche du point
optimal : plus l'espace de recherche est large, plus la possibilité
d'être piégé par les optima locaux est grande.
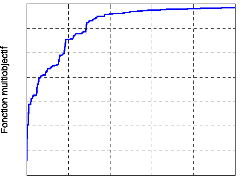
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3 0 50 100 150 200 250
Générations
Figure 115. Evolution de la fonction
multiobjectif.
Au-delà de ces résultats et pour montre
l'efficacité de notre approche des contraintes dynamiques, nous
proposons de l'appliquer sur un petit espace de recherche se trouvant assez
loin de la solution optimale que nous avons déjà
trouvée.
Nous prenons, par exemple, la moitié de l'espace de
recherche initial identifié par la relation (144), soit l'espace
donné par la relation (157). En optimisant, en premier lieu, les
paramètres des PSSs avec contraintes fixes, nous trouvons que la
fonction multiobjectif converge à une valeur trop faible, soit 0.5 13,
figure (116).
0.1 20
,
= =
K PSS j
0 . 00 1 0 .05
= =
T 1 , j
0 . 00 1 0 . 05
= =
T 3 j
,
(157)
Par contre, lors de l'application des contraintes dynamiques,
l'espace de recherche s'élargit successivement et la valeur de la
fonction multiobjectif s'améliore jusqu'à l'arrivée
à une valeur très proche de la solution optimale trouvée
précédemment, soit 1.225, figure (116).
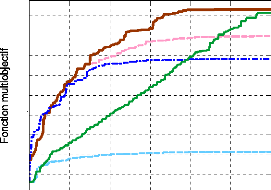
1.2
1.1
1
0.9
0.8
0.7
0.6
0.5
0.4
0 50 100 150 200 250 300
Générations
Espace de recherche initial
Demi-espace de recherche

Contraintes fixes Contraintes dynamiques

Contraintes fixes Contraintes dynamiques
Espace de recherche élargi

Contraintes fixes
Figure 116. Evolution de la fonction
multiobjectif des résultats de la 1ère
application.
Nous résumons dans le tableau suivant l'ensemble des cinq
résultats d'AG obtenus avec : - l'espace de recherche initial à
contraintes fixes (ERICF).
- l'espace de recherche à contraintes dynamiques
(ERCD).
- l'espace de recherche élargi à contraintes fixes
(ERECF).
- la moitié de l'espace de recherche initial à
contraintes fixes (MERICF).
- la moitié de l'espace de recherche à contraintes
dynamiques (MERCD).
|
ERICF
|
ERCD
|
ERECF
|
MERICF
|
MERCD
|
|
Valeur finale de la
fonction multiobjectif
|
1.097
|
1.234
|
0.984
|
0.513
|
1.222
|
|
Valeur finale relative %
(par rapport à l'ERICF)
|
_____
|
12.4 %
|
? 10.3 %
|
? 53.2 %
|
11.4 %
|
|
Taux de convergence %
(par rapport à l'ERICF)
|
_____
|
- 52 %
|
non-
convergeant
à 1.097
|
non-
convergeant
à 1.097
|
- 6 %
|
Tableau 22. Résultats de la
1ère application.
En analysant ces résultats nous pouvons dire que :
- Vu le nombre important des paramètres à
optimiser (42 paramètres dans ce cas), il très difficile de
donner à chaque paramètre un espace de recherche
différent. Nous les proposons donc identiques.
- Dans le cas de l'optimisation avec espace de recherche fixe
; si la taille de cet espace est faible, il y a très peu de chance qu'il
contienne la meilleure solution du problème. On converge souvent vers un
optimum local.
- D'autre part, si l'espace de recherche fixe est très
large ; l'exploration et l'exploitation de cet espace risquent de ne pas
être efficaces. L'optimisation, dans ce cas, est souvent
piégée par un optimum local.
- Par contre, lors de l'utilisation des contraintes
dynamiques, seuls les paramètres qui ne trouvent pas leurs valeurs
optimales dans l'espace de recherche initial vont évoluer pour prendre
des valeurs supérieures ou inférieures. Cela se traduit donc par
une convergence rapide vers la solution optimale, avec une amélioration
de la robustesse de l'AG et de la performance de l'optimisation.
5.4- Deuxième application.
Nous allons maintenant valider notre approche pour un autre cas
d'optimisation. Nous l'appliquons au troisième cas (12 PSSs).
5.4.1- Optimisations par contraintes fixes.
Rappelons que l'optimisation des PSSs du troisième cas,
par contraintes fixes, a été faite dans le chapitre
précédent (§§-5.5.1). Les espaces de recherche des 12
PSSs à optimiser par PSS sont soumis aux contraintes données par
la relation (149). Les paramètres du réglage de l'AG sont
donnés au tableau (14).
L'évolution de la fonction multiobjectif en fonction du
nombre de générations est donnée à la figure (91).
Sur cette figure, nous remarquons que la fonction multiobjectif atteint la
valeur finale, soit 1.223, pour la génération maximale
prédéterminée de 300.
Rappelons aussi que la répartition des modes
électromécaniques du système dans le plan complexe est
donnée à la figure (93). Cette dernière montre que tous
les modes dominants se trouvent dans la zone D de stabilité ;
le facteur d'amortissement minimum est æmin = 13.96 % et la
partie réelle maximale des valeurs propres est ómax = -
1.0836.
5.4.2- Optimisations par contraintes
dynamiques.
Comme nous l'avons proposé dans cette nouvelle
approche, le processus d'optimisation est initialisé par les contraintes
des espaces de recherche fixes (relation (149)). Les paramètres de
réglage choisis pour l'AG restent les mêmes, (tableau (14)).
La figure (91) représentant l'évolution de la
fonction multiobjectif montre que, à partir de la
120ème génération, cette fonction ne
s'améliore plus d'une façon "importante". Les contraintes
dynamiques sont appliquées à partir de cette
génération, (Nd = 120).
Les marges de tolérance (åm,
ån) des deux extrémités de l'espace de
recherche de chaque paramètre sont choisies comme suit :
|
å å
m PSS i n PSS i
( ) 1 , ( ) 0 .2
K K
, ,
= =
å å
m i n i
( ) 0. 0 1 , ( ) 0 . 002
T T
1 , 1 ,
= =
|
(158)
|
|
å å
m i n i
( ) 0 . 0 1 , ( )
T T
3 , 1 ,
=
|
0.002
|
Le nombre des générations successives
nécessaire pour permettre aux contraintes de changer leurs valeurs est
déterminé à Ng = 20.
Les variations possibles des contraintes
(Äm, Än) sont choisies, quant
à elles, comme suit : ( ) 2 , ( )
Äm
0.2
K K
PSS i n PSS i
, ,
= Ä
|
Äm
|
( ) 0 . 02 , ( )
T T
1 , 1 ,
i n i
= Ä
|
0.002
|
(159)
|
Äm (T3
, 1,
i n i
) 0. 02 , ( ) 0 . 002
= Ä =
T
Les valeurs optimales des paramètres des PSSs sont
données au tableau (23).
|
N° PSS
|
N° G.
|
KPSS
|
T1
|
T3
|
|
1
|
53
|
22.7145
|
0.0715
|
0.1371
|
|
2
|
54
|
36.6309
|
0.0369
|
0.0450
|
|
3
|
55
|
34.2725
|
0.0953
|
0.0889
|
|
4
|
57
|
01.8484
|
0.0869
|
0.0689
|
|
5
|
58
|
28.9526
|
0.0864
|
0.0397
|
|
6
|
59
|
11.5439
|
0.0712
|
0.0398
|
|
7
|
61
|
45.8373
|
0.0529
|
0.1102
|
|
8
|
62
|
20.5999
|
0.0149
|
0.0494
|
|
9
|
64
|
17.9713
|
0.0466
|
0.0452
|
|
10
|
66
|
49.3448
|
0.0192
|
0.0179
|
|
11
|
67
|
43.6407
|
0.0044
|
0.03 11
|
|
12
|
68
|
39.1085
|
0.0506
|
0.0793
|
Tableau 23. Paramètres des PSSs
optimisés par AG à contraintes dynamiques. Les valeurs des
paramètres fixés des PSSs sont les mêmes que le cas
précédent : Tw,j = 10 et T2,j = T4,j =
0.02.
L'évolution de la fonction multiobjectif en fonction du
nombre de générations est donnée à la figure
(117).
|
1.4
1.2
1 0.8 0.6 0.4 0.2
0
|
|
0 50 100 150 200 250 300
Génerations
Figure 117. Evolution de la fonction
multiobjectif.
Nous présentons dans le tableau suivant les
résultats de l'AG obtenus dans cette application avec :
- l'espace de recherche à contraintes fixes (ERCF).
- l'espace de recherche à contraintes dynamiques
(ERCD).
|
ERCF
|
ERCD
|
|
Valeur finale de la fonction
multiobjectif
|
1.223
|
1.387
|
|
Valeur finale relative %
(par rapport à l'ERCF)
|
_____
|
13.4 %
|
|
Taux de convergence %
(par rapport à l'ERCF)
|
_____
|
- 30 %
|
Tableau 24. Résultats de la
2ème application.
Comme dans la 1ère application (relation
(155)), la figure (118) montre qu'à partir de la
175ème génération, un gain progressif du nombre
de générations est constaté par l'optimisation à
contraintes dynamiques. Le gain maximum, pour une valeur fixée du
rendement, est de 35 générations.
La répartition des modes
électromécaniques du système équipé des 12
PSSs optimisés est donnée à la figure (119). Cette figure
montre clairement que tous les modes électromécaniques du
système sont bien déplacés dans la zone D de
stabilité. Le facteur d'amortissement minimum et la partie réelle
maximale des valeurs propres sont respectivement æmin = 13.74 %,
ómax = - 1.249. Ce résultat d'optimisation garantit la
stabilité globale du système et une performance robuste pour un
grand nombre de scénarios.
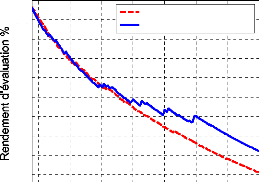
0.8
Contraintes fixes Contraintes dynamiques
0.7
0.6
0.5
0.4
125 150 175 200 225 250 275 300
Génération

Figure 118. Evolution du rendement de la
fonction multiobjectif.
Modes locaux Modes interrégionaux
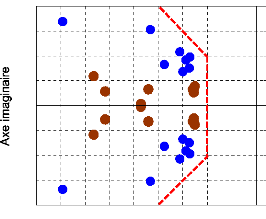
20
dz = 10 %
10
0
-10
-4 -3 -2 -1 0
-1
-20
Axe réel
Figure 119. Valeurs propres du
système.
5.5- Conclusion.
Dans ce chapitre, nous avons proposé une approche
d'optimisation d'AG à contraintes dynamiques permettant la recherche du
point optimal du problème hors des contraintes initiales de l'espace de
recherche.
Pour mettre en évidence l'apport de cette approche,
nous l'avons appliquée à l'optimisation des PSSs. Nous avons
également comparé les résultats obtenus avec ceux de l'AG
à contraintes fixes.
Par rapport à l'optimisation utilisant l'AG à
contraintes fixe, l'analyse des résultats obtenus montre que la nouvelle
approche assure :
- une amélioration de la valeur finale de la fonction
multiobjectif (plus de 12 % dans les deux cas étudiés).
- une accélération de la convergence (plus de 30 %
sur le nombre de générations, dans les deux cas
étudiés).
Par conséquent, cette amélioration de la
fonction multiobjectif conduit à une meilleure stabilité globale
du système. Elle garantit aussi une bonne performance du système
pour divers points de fonctionnement et scénarios.
En conclusion, nous pouvons dire qu'il est possible de bien
améliorer la convergence de l'AG et la performance de son
résultat. Cela améliore en outre la robustesse de l'AG et sa
désensibilisation vis-à-vis de l'espace de recherche
proposé.
De ce fait, l'approche de l'AG à contraintes dynamiques
ouvre des nouvelles possibilités dans l'utilisation des AGs.
CONCLUSION GENERALE ET PERSPECTIVE
Les systèmes de puissance ne cessent de se
développer. L'extension des réseaux interconnectés rend
les systèmes fortement sensibles aux oscillations
interrégionales. Ces oscillations peuvent sérieusement
restreindre le transport de l'énergie électrique. Elles peuvent
également conduire à des perturbations s'étendant à
tout le système de puissance si, par exemple, une cascade de fautes de
lignes de transmission se produit. Dans ces nouvelles conditions, les
opérateurs des réseaux électriques se trouvent souvent
obligés à faire fonctionner les systèmes aux limites de la
stabilité. Par conséquent, l'amélioration de la
stabilité aux petites perturbations, en particulier l'amortissement des
oscillations interrégionales, représente un objectif
prioritaire.
Le travail présenté dans ce mémoire
concerne l'étude des méthodes de régulation par des AGs.
Les PSSs représentent toujours un moyen efficace pour l'amortissement
des modes électromécaniques locaux, mais leur rôle dans
l'amortissement des modes interrégionaux est toujours
considéré comme de faible importance. Dans cette étude
nous avons montré que les PSSs peuvent satisfaire aussi bien
l'amortissement des modes interrégionaux que l'amortissement des modes
locaux. Ainsi, l'optimisation simultanée de la localisation et des
paramètres des PSSs permet à chaque PSS installé dans le
système de participer, outre l'amortissement du mode local
associé à son générateur, à l'amortissement
des modes des autres régions.
Notre travail de recherche s'est articulé autour des
points suivants :
- la modélisation d'un système de puissance,
modélisation adaptée pour l'étude de stabilité aux
petites perturbations.
- les méthodes classiques de réglage et
d'emplacement des stabilisateurs PSSs et les méthodes d'analyse de la
performance du système.
- l'optimisation globale des PSSs par des AGs.
- le développement d'un AG adaptatif travaillant sur des
espaces de recherche dynamiques.
Dans la partie modélisation, nous avons
présenté les modèles mathématiques non-
linéaires des éléments du système de puissance.
Nous avons également développé le modèle
linéaire associé.
Nous avons aussi rappelé la théorie de la
stabilité, les problèmes de la stabilité aux petites
perturbations d'un système de puissance et le principe du stabilisateur
PSS.
Dans l'optimisation globale des PSSs, nous avons
présenté une méthode basée sur les AGs, pour un
problème multiobjectif d'étude de stabilité aux petites
perturbations. Cette méthode s'appuyant sur les valeurs propres du
système permet d'obtenir, sans passer par la méthode classique
des facteurs de participation, non seulement une optimisation des
paramètres des stabilisateurs PSSs, mais aussi une meilleure
localisation et une réduction intéressante de leur nombre.
L'analyse des résultats obtenus montre qu'un nombre
réduit de PSSs, judicieusement situés et dont les
paramètres sont optimisés, permet d'assurer un bon amortissement
des oscillations électromécaniques et d'assurer convenablement la
stabilité globale du système.
Enfin, l'implantation d'une méthode auto-adaptative des
espaces de recherche a montré, à travers les résultats
obtenus, qu'il est possible de "bien améliorer" la convergence de l'AG
et la performance de son résultat. Cette méthode améliore
ainsi la robustesse de l'AG et son découplage vis-à-vis de
l'espace de recherche proposé.
Les perspectives de ce travail sont nombreuses car les recherches
dont il a fait l'objet sont encore loin d'être finalisées.
Plusieurs approches d'amélioration des méthodes
d'optimisation sont proposées dans la littérature : elles sont
basées sur la possibilité d'hybrider plusieurs méthodes
d'optimisation. Ces approches consistent à coupler des méthodes
à caractère global avec des méthodes plus locales. A
partir des résultats fournis par les méthodes globales, il est
possible d'utiliser ensuite des méthodes locales pour affiner la
recherche des solutions optimales (Régnier, 2003). La perspective que
nous jugeons la plus intéressante consisterait à extraire les
meilleurs individus d'une des premières générations de la
méthode globale (tel l'AG) et ensuite, à appliquer une
méthode locale (tel le recuit simulé) sur ces individus pour un
certain nombre de générations. Enfin, nous continuons
l'optimisation par la méthode globale. L'intervention de la
méthode locale au cours de l'optimisation par la méthode globale
permettrait de profiter des performances d'exploration et d'exploitation de ces
différentes méthodes et de la diversité de la population
dès le départ de l'optimisation : la performance serait par
conséquent améliorée avec une convergence rapide vers
l'optimum global.
L'approche utilisée dans cette étude est
basée sur le modèle linéaire du système. Elle
comprend donc seulement des informations sur le comportement dynamique
linéaire du système. Cela peut s'avérer insuffisant pour
fournir une caractérisation complète et correcte de la
performance du système, en particulier lors de fortes contraintes ou
d'un fonctionnement à la limite de la stabilité. Il serait
nécessaire, par conséquent, d'appliquer notre approche au
modèle non-linéaire.
Dans les modes interrégionaux plusieurs
générateurs de différentes régions sont
impliqués. Pour apporter un meilleur amortissement à ces modes,
différents travaux scientifiques (Snyder et al., 1998;
Hasanovic et al., 2002; Kerim, 2002) montrent l'intérêt
d'utiliser des signaux globaux (issus de générateurs à
distance) en plus des signaux locaux (issus de générateurs
associés directement aux PSSs). Notre méthode pourrait être
appliquée pour optimiser le choix des générateurs
(à l'origine des modes interrégionaux) devant fournir les signaux
globaux nécessaires aux PSSs.
Enfin, nous pourrions l'appliquer aux systèmes FACTS qui
sont de plus en plus présents dans les réseaux
électriques.
LISTE DE PUBLICATIONS
Notre travail de recherche a abouti aux publications suivantes.
Publications de revues.
1- Abdelghani Choucha, Hasan Alkhatib, Jean Duveau,
Abdelhafid Hellal, Salem Arif, « Nouvelle approche d'optimisation des
stabilisateurs de puissance : algorithmes génétiques à
contraintes dynamiques », article soumis en 2008 Revue
Internationale de génie électrique RIGE.
2- Hasan Alkhatib, Abdelghani Choucha, Jean Duveau,
Abdelhafid Hellal, Salem Arif, « Multiobjective GA to Simultaneous
Coordinated Tuning PSS for Multimachine Power Systems », article
soumis en 2008 Revue Elsevier (Science Direct).
3- Hasan Alkhatib, Abdelghani Choucha, Jean Duveau,
Abdelhafid Hellal, Salem Arif, « Optimisation, localisation et
réduction des stabilisateurs de puissance par algorithmes
génétiques », article à paraître en
2009 Revue Internationale de génie électrique RIGE.
Publications de conférences
internationales.
1- Hasan Alkhatib, Jean Duveau, Marcel Pasquinelli, «
Power System Stabilizer Optimization Based on Adaptive Genetic Algorithms
», 44th International Univers ities Power Engineering
Conference IEEE- UPE009, Glasgow, Scotland, 1-4 September 2009.
2- Hasan Alkhatib, Jean Duveau, Marcel Pasquinelli, «
Genetic Algorithms Based Dynamic Search Spaces for Global Power System
Stabilizer Optimization », 17th Mediterranean Conference on
Control and Automation IEEE-MED'09, (ISBN 978-1-4244-4684-1),
Thessaloniki, Greece, 24-26 June 2009.
3- Hasan Alkhatib, Jean Duveau, « Effect of Machine
Modelling on Power System Small Signal Stability », 17th
International Conference on Control Systems and Computer Science CSCS-17,
Bucharest, Romania, 26-29 May 2009.
4- Hasan Alkhatib, Jean Duveau, Abdelghani Choucha,
Abdelhafid Hellal, Salem Arif, « Optimisation Globale de la Performance
des Stabilisateurs de Puissance par Algorithmes Génétiques
», 5th International Conference on Electrical Engineering
CEE'2008, Batna, Algeria, 27-29 October 2008.
5- Abdelghani Choucha, Hasan Alkhatib, Jean Duveau,
Abdelhafid Hellal, Salem Arif, « Multiobjective GA to Simultaneous
Coordinated Tuning PSS and Location for Multimachine Power Systems »,
XVIII International Conference on Electrical Machines IEEE-ICEM'08,
(ISBN 978-1-4244-4684-1), Vilamoura, Portugal, 6-9 September 2008.
6- Hasan Alkhatib, Abdelghani Choucha, Jean Duveau,
Abdelhafid Hellal, Salem Arif, « Optimisation Simultanée Globale
des Stabilisateurs de Puissance via les Algorithmes Génétiques
», Conférence Internationale Francophone d'Automatique CIFA
2008, Bucarest, Roumanie, 3-5 September 2008.
7- Hasan Alkhatib, Jean Duveau, Abdelghani Choucha,
Abdelhafid Hellal, Salem Arif, « Simultaneous optimization of power system
stabilizer parameters, number and locations via genetic algorithms »,
43rd International Universities Power Engineering Conference
IEEE-UPE008, (ISBN 978-88-89884-09-6), Padova, Italy, 1-4 September
2008.
8- Hasan Alkhatib, Abdelghani Choucha, Jean Duveau,
Abdelhafid Hellal, Salem Arif, « Optimisation Simultanée des
Paramètres, de Localisation et de Nombre des Stabilisateurs de Puissance
par Algorithmes Génétiques », 2nd
International Conference on Electrical and Electronics Engineering, ICEEE
'08, pp. 11-18, Laghouat, Algeria, 2 1-23 April 2008.
9- Abdelghani Choucha, Hasan Alkhatib, Abdelhafid Hellal,
Salem Arif, « Technique d'amélioration de Réglage des
Stabilisateurs de Puissance via les Algorithmes Génétiques
à Contraintes Dynamiques », 2nd International
Conference on Electrical and Electronics Engineering, ICEEE'08,
pp.195-200, Laghouat, Algeria, 2 1-23 April 2008.
BIBLIOGRAPHIE
1- (Abdel-Magid et al., 2003).
Abdel-Magid Y.L. and Abido M.A., « Optimal
Multiobjective Design of Robust Power System Stabilizers Using Genetic
Algorithms », IEEE Trans. Power System, vol. 18. n°. 3, pp.
1125-1 132, Aug. 2003.
2- (Abdel-Magid et al., 1999).
Abdel-Magid Y.L., Abido, M.A., Baiyat S. and Mantawy A.H.,
« Simultaneous Stabilization of Mulfimachine Power Systems Via Genetic
Algorithms », IEEE Trans. on Power Systems, vol.14, n°.4,
pp.1428-1439, Nov. 1999.
3- (Abe et al., 1983).
Abe S. and Doi A., « A new power system stabilizer
synthesis in multimachine power systems », IEEE Trans. Power App.
Syst., vol. PAS-102, pp. 3910-3918, 1983.
4- (Aboul-Ela et al., 1996).
Aboul-Ela M.E., Salam A.A., McCalley J.D. and Fouad A.A.,
« Damping Controller Design for Power System Oscillations Using Global
Signals », IEEE Transactions on Power Systems, vol. 11, n°.
2, pp. 767-773, May 1996.
5- (Alba et al., 1999).
Alba E. and Troya J.M., « A survey of parallel distributed
genetic algorithms », in Complexity, vol. 4, pp. 3 1-52,
1999
6- (Allenbach, 2005, I).
Allenbach J.M., Systèmes Asservis, Volume 1,
Asservissements linéaires classiques, Ecole d'Ingénieurs de
Genève, 2005.
7- (Allenbach et al., 2005, II).
Allenbach J.M. et Rotzetta A., Systèmes Asservis, Volume
3, Asservissements par variables d'état, Ecole d'Ingénieurs de
Genève, 2005.
8- (Anderson et al., 2003).
Anderson P.M. and Fouad A.A., Power System Control and
Stability, IEEE. Press. 2003.
9- (Andersson, 2006).
Andersson G., Modeling and analysis of Electric Power Systems,
Lectures 227-526, EEH Power Systems Laboratory, ETH, Zurich, March 2006.
10- (Andersson, 2004).
Andersson G., Dynamic and Control of Electric Power Systems,
Lectures 227-528, EEH Power Systems Laboratory, ETH, Zurich, March 2004.
11- (Angeline, 1995).
Angeline P.J., « Adaptive and Self-Adaptive Evolutionary
Computations », in M. Palaniswami, et al. editors,, Computational
Intelligence: A Dynamic Systems Perspective, pp. 152-163, IEEE Press,
1995.
12- (Angeline, 1998).
Angeline P.J., « Evolutionary Optimization versus
Particle Swarm Optimization: Philosophy and Performance Differences »,
Proc. of the 7th Conf. on Evolutionary Programming, vol.
VII, pp. 601-610, March 1998.
13- (Arredondo, 1997).
Arredondo J.M., « Results of a study on location and tuning
of power system stabilizers », Int. J. Electr. Power Energy
Syst., vol. 19, pp. 563-567, 1997.
14- (Arthur R. Bergen et al., 2000). Arthur R. Bergen
and Vittal V., Power System Analysis. 2nd Edition, Prentice
Hall, 2000.
15- (Aström et al., 1995).
Aström K. and Hägglund T., PID Controllers:
Theory, Design, and Tuning, Instrument Society of America, 1995.
16- (Bäck, 1992).
Bäck T., « Self-adaptation in genetic algorithms
», Proc. of the first European Conference on Artificial Life,
Cambridge, pp. 263-271, MIT Press, 1992.
17- (Barnier et al., 1999).
Barnier N. and Brisset P., « Optimisation par algorithme
génétique sous contraintes », Technique et science
informatiques, vol. 18, n°. 1, pp. 1-29, 1999.
18- (Basler et al., 2005).
Basler M.J. and Schaefer, R.C., « Understanding power
system stability », Proceedings of the 58th Annual Conference for
Protective Relay Engineers, pp. 46-67, April 2005.
19- (Basler et al., 2002).
Basler M.J., Schaefer R.C., Kim K. and Glenn R., «
Voltage Regulator with Dual PID Controllers Enhances Power System Stability
», Hydro Vision Conference, U.S.A., July/Aug 2002.
20- (Bonabeau et al., 2002).
Bonabeau E., Dorigo M., and Theraulaz G., Swarm Intelligence:
From Natural to Artificial Systems, Oxford Press, 1999.
21- (Bontemps, 1995).
Bontemps C., Principes Mathématiques et Utilisations des
Algorithmes Génétiques, Paris, Novembre 1995.
http://w3.toulouse.inra.fr/centre/esr/CV/bontemps/WP/AlgoGene.html.
22- (Bornard et al., 2005).
Bornard P., Pavard M. et Testud G., « Réseaux
d'Interconnexion et de Transport :
Réglages et Stabilité
», Techniques de l'Ingénieur, Traité Génie
Electrique, D4-092, 2005.
23- (Bragasson, 2005).
Bragasson R.F., Damping in the Icelandic power system, Small
signal stability analysis and solutions, Master Thesis, Dept. of Industrial
Electrical Engineering and Automation, Lund University, 2005.
24- (Breulmann et al., 2000).
Breulmann H., Grebe E., Lösing M., Winter W., Witzmann
R., Dupuis P., Houry M.P., Margotin T., Zerenyi J., Dudzik J., Machowski J.,
Martin L., Rodriguez J.M., Urretavizcaya E., Analysis and Damping of Inter-Area
Oscillations in the UCTE/CENTREL Power System, CIGRE Session, 2000.
25- (Brogan et al., 2000).
Brogan W.L., Lee G.K.F., Sage A.P., Kuo B.C., Phillips C.L.,
Harbor R.D., Jacquot R.G., McInroy J.E., Atherton D.P., Bay J.S., Baumann W.T.
and Chow M-Y., Control Systems, The Electric Engineering Handbook, CRC Press
LLC, Boca Raton, 2000.
26- (Cai, 2004).
Cai L.J., Robust Coordinated Control of FACTS Devices in Large
Power Systems, Ph.D. Thesis, University of Duisburg-Essen, February 2004.
27- (Chatelain, 1983).
Chatelain J., Traité d'électricité,
Machines Electriques, Volume X, Ecole polytechnique Fédérale de
Lausanne, 1983.
28- (Chipperfield et al., 1994).
Chipperfield A., Fleming P., Pohlheim H. and Fonsca C.,
Genetic Algorithm Toolbox User's Guide, Department of Automatic Control System
Eng, University of Sheffield, UK. 1994.
29- (CIGRE, 1999).
CIGRE Task Force 38.02.17, 1999, Advanced Angle Stability
Controls, A Technical Brochure for International Conference on Large High
Voltage Electric Systems (CIGRE), December 1999.
30- (CIGRE, 1996).
CIGRE Task Force, 38.01.07, on Power System Oscillations,
Analysis and Control of Power System Oscillations, CIGRE Technical Brochure
n°. 111, December 1996.
31- (Custem, 2002, I).
Custem T.V., Systèmes électriques de Puissance
I. Cours ELEC 029, Département d'Electricité, Electronique et
Informatique : Institut Montefiore, Université de Liège, 2002.
32- (Custem, 2002, II).
Custem T.V., Systèmes électriques de Puissance
II. Cours ELEC 047, Département d'Electricité, Electronique et
Informatique : Institut Montefiore, Université de Liège, 2002.
33- (Dandeno et al., 1968).
Dandeno P.L., Karas A.N., McClymont K.R. and Watson, W.
« Effect of high-speed rectifier excitation systems on generator stability
limits », IEEE Trans. on Power Apparatus and Systems, vol.
PAS-87, n°. 1, pp. 190-196, 1968.
34- (Deb, 1999).
Deb K., Self-adaptive Genetic Algorithms with Simulated
Binary Crossover, Technical Report n°. CI-61/99, Department of Computer
Science/XI, University of Dortmund, Germany, 1999.
35- (DeMello et al., 1978).
DeMello F.P., Flannett L.N. and Undrill J.M., « Practical
approach to supplementary stabilizing from accelerating power », IEEE
Trans., vol. PAS-97, pp, 15 15-1522, 1978.
36- (DeMello et al., 1969).
DeMello F.P. and Concordia C., « Concepts of synchronous
machine stability as affected by excitation control », IEEE Trans. on
PAS, vol. PAS-88, pp. 316-329, 1969.
37- (Do Bomfim et al., 2000).
Do Bomfim A.L.B., G.N. Taranto and Falcao D.M., «
Simultaneous Tuning of Power System Damping Controllers Using Genetic
Algorithms », IEEE Trans. On Power Systems, Vo1.15, n°.1,
pp.163-169, Feb 2000.
38- (Duvigneau, 2006).
Duvigneau R., « Introduction aux méthodes sans
gradient pour l'optimisation et le contrôle en Mécanique des
Fluides », Projet OPALE, INRIA Sophia-Antipolis, Mars 2006, Aussois.
39- (Farmer, 2006).
Farmer R.G., Power System Dynamics and Stability, The Electric
Power Engineering Handbook, 2nd edition, CRC Press, Talyor &
Francis Group, LLC, 2006.
40- (Feliachi, 1990).
Feliachi A., « Optimal Siting of Power System Stabilizers
», IEE Proceedings, Pt. C, vol. 137, n°.2, pp. 101-106,
March 1990.
41- (Fleming et al., 1981).
Fleming R.J., Mohan M.A. and Parvatisam K., « Selection
of parameters of stabilizers in multi-machine power systems », IEEE
Transactions on Power Apparatus and Systems, vol. PAS-100, pp. 2329-2333,
1981.
42- (Fouad et al., 1991).
Fouad A.A. and Vittal V., Power System Transient Stability
Analysis Using the Transient Energy Function Method. Englewood Cliffs, NJ:
Prentice-Hall, 1991.
43- (Gholipour Shahraki, 2003).
Gholipour Shahraki E., Apport de l'UPFC à
l'amélioration de la stabilité transitoire des réseaux
électriques, Thèse de doctorat, Faculté des Sciences &
Techniques, Université Henri Poincaré, Nancy-I, 2003.
44- (Goldberg, 1989).
Goldberg D.E., Genetic Algorithms in Search, Optimisation
and Machine Learning, Addison-Wesley, 1989.
45- (Hahn, 1967).
Hahn W., Stability of motion, Springer-Verlag, Berlin,
1967.
46- (Hasanovic et al., 2002).
Hasanovic A. and Feliachi A., « Genetic Algorithm Based
Inter-area Oscillation Damping Controller Design Using MATLAB », IEEE
Transactions on Power System, vol. 11, n°. 2, pp. 1136-1141, May
2002.
47- (Holland, 1975).
Holland J., Adaptation in natural and artificial
systems, University of Michigan Press, 1975.
48- (Hong et al., 1999).
Hong Y.Y. and Wu W.C., « A new approach using
optimization for tuning parameters of power system stabilizers », IEEE
Transactions on Energy Conversion, vol. 14, n°. 3, pp. 780-786, Sept.
1999.
49- (Hongesombut et al., 2005).
Hongesombut K., Dechanupaprittha S., Mitani Y. and Ngamroo
I., « Robust power system stabilizer tuning based on multiobjective design
using hierarchical and parallel micro genetic algorithm »,
15th Power Systems Computation Conference: PSCC, Session
28, Paper 2, pp. 1-7 Liege, Belgium, Aug. 2005.
50- (Hongesombut et al., 2004).
Hongesombut K. and Mitani Y., « Implementation of
Advanced Genetic Algorithm to Modern Power System Stabilization Control »,
IEEE PES, Power Systems Conference & Exposition, vol. 2, pp.
1050-1055, Oct. 2004.
51- (Hongesombut et al., 2002).
Hongesombut K., Mitani Y. and Tsuji K., « Power System
Stabilizer Tuning in Multimachine Power System Based on a Minimum Phase Control
Loop Method and Genetic Algorithm », 14th Power Systems
Computation Conference: PSCC, Session14, Paper 1, pp. 1-7, Sevilla, Jun.
2002.
52- (Hongesombut et al., 2001).
Hongesombut K., Mitani Y. and Tsuji K., « An Automated
Approach to Optimize Power System Damping Controllers Using Hierarchical
Genetic Algorithms », Proc. of Intelligent System Application to Power
Systems, pp.3-8, June 2001.
53- (Hsu et al., 1987).
Hsu Y.Y. and Chen C.L., « Identification of Optimum
Location for Stabilizer Applications Using Participation Factors »,
IEE Proc., Pt. C, vol. 134, n°. 3, pp. 23 8-244, May 1987.
54- (IEEE, 2005).
IEEE, IEEE recommended practice for excitation system models
for power system stability studies, Institute of Electrical and Electronics
Engineers, Inc. USA, Std.42 1.5, 2005.
55- (IEEE, 1990).
IEEE Standard 421.2-1990, IEEE Guide for Identification, Testing,
and Evaluation of the Dynamic Performance of Excitation Control Systems,
1990.
56- (IEEE, 2003).
IEEE Task Force on Power System Stabilizers, « Overview of
Power System Stability Concepts », IEEE Trans. On Power Systems,
pp. 1762-1768, 2003.
57- (IEEE/CIGRE, 2004).
IEEE/CIGRE Joint Task Force on Stability Terms and
Definitions, « Definition and Classification of Power System Stability
», IEEE Trans. On Power Systems, vol. 19, n°. 2, pp.
1387-1401, May 2004.
58- (IEEE/PES, 2002).
IEEE/PES Power systems stability subcommittee special
publication, Voltage Stability Assessment: Concepts, Practices and Tools,
technical report, sp101pss, Aug. 2002.
59- (Jin Lu et al., 1990).
Jin Lu, Hsiao-Dong Chiang and James S. Thorp, «
Identification of optimum site for power system stabilizer applications »,
IEEE Transactions on Power Systems, vol. 5, n°. 4, pp. 1302-1308,
November 1990.
60- (Kerim, 2002).
Kerim M., Mesures synchronisées par GPS pour une
meilleure stabilité des réseaux, Thèse de doctorat,
Institut Nationale Polytechnique de Grenoble, 2002.
61- (Kennedy et al., 1995).
Kennedy J. and Eberhart R., « Particle Swarm Optimization
», Proc of IEEE International Conference on Neural Networks
(ICNN'95), vol. IV, pp.1 942-1948, Perth, 1995.
62- (Kennedy et al., 2001).
Kennedy J. and Eberhart R., Swarm Intelligence, San Francisco,
Morgan Kaufmann Publishers, 2001.
63- (Khalil, 1996).
Khalil H.K., Nonlinear system, Prentice Hall, Upper
Saddle River, N. J. 07458, 1996.
64- (Kundur, 1994).
Kundur P., Power System Stability and Control. The EPRI
Power System Engineering Series, McGraw-Hill. Inc. 1994.
65- (Kundur et al., 1989).
Kundur P., Klein M., Rogers G.J. and Zywno M.S., «
Application of Power System Stabilizers for Enhancement of Overall System
Stability », IEEE Transaction on Power System, vol. 4, n°.
2, pp. 614-626. May, 1989.
66- (Kwang et al., 2008).
Kwang Y.L. and El-Sharkawi M.A., Modern Heuristic Optimization
Techniques: Theory and Applications to Power Systems, IEEE Press Series on
Power Engineering, 2008
67- (Larsen et al., 1981, I).
Larsen E.V. and Swann D.A., « Applying power system
stabilizers part-I: General concepts », IEEE Trans. Power App.
Sys., vol.100, n°. 6, pp. 3017-3024, Jun. 1981.
68- (Larsen et al., 1981, II).
Larsen E.V. and Swann D.A., « Applying power system
stabilizers part-II: Performance Objectives and Tuning Concepts »,
IEEE Trans. Power App. Sys., vol.100, n°. 6, pp. 3025-3033, Jun.
1981.
69- (Larsen et al., 1981, III).
Larsen E.V. and Swann D.A., « Applying power system
stabilizers part-III: Practical considerations », IEEE Trans. Power
App. Sys., vol.100, n°. 6, pp. 3034-3046, Jun. 1981.
70- (Machowski et al., 1998).
Machowski J., Bialek J.W. and Bumby J.R., Power system
dynamics and stability, West Sussex, London, John Wiley & Sons Ltd,
1998.
71- (Meyer et al., 1998).
Meyer B., Jerosolimski M. et Stubbe M., « Outils de
Simulation Dynamique des Réseaux Electriques », Techniques de
l'Ingénieur, Traité Génie Electrique, D4- 120,
1998.
72- (Milano, 2005).
Milano F., PSAT: Power System Analysis Toolbox, Documentation
for PSAT version 1.3.4, July 2005.
http://thunderbox.uwaterloo.ca/~fmilano.
73- (Miller et al., 1982).
Miller R.K. and Michel A.N., Ordinary Differential
Equations. New York: Academic, 1982.
74- (Mitchell, 1996).
Mitchell M., An Introduction to Genetic Algorithms,
The MIT Press, Massachusetts, 1996.
75- (Negnevitsky, 2002).
Negnevitsky M., Artificial Intelligence: A Guide to
Intelligent Systems, Addison Wesley, Harlow, England, 2002.
76- (Osman et al., 1996).
Osman I.H. and Laporte G., « Metaheuristics: a bibliography
», Annals of Operations Research 63, pp. 5 13-623, 1996.
77- (Ostojic, 1988).
Ostojic D.R., « Identification of optimum site for power
system stabiliser applications ». IEE Proc, Pt. C, vol. 135,
n°. 5, pp. 416-419, September 1988.
78- (Pagola et al., 1989).
Pagola F.L., Pérez-Arriaga I.J. and Verghese G.C.,
« On sensitivities, residues and participations: Applications to
oscillatory stability and control », IEEE Trans. Power Sys., vol.
4, n°. 1, pp. 278-285, Feb. 1989.
79- (Pal et al., 2005).
Pal B. and Chaudhuri B., Robust Control in Power
Systems, Springer Science + Business Media, Inc, 2005.
80- (Panda et al., 2007).
Panda S. and Prasad Padhy N., « Power system with PSSs
and FACTS Controller: Modelling, Simulation and Simultaneous Tuning Employing
Genetic Algorithm », International Journal of Electrical, Computer and
Systems Engineering, vol.1, n°. 1, pp.9- 18, 2007.
81- (Parks et al., 1981).
Parks P. C. and Hahn V., Stabililtätstheorie,
Springer-Verlag, Berlin, 1981.
82- (Passelergue, 1998).
Passelergue J.C., Interactions des dispositifs FACTS dans les
grands réseaux électriques, Thèse de doctorat, Institut
Nationale Polytechnique de Grenoble, 1998.
83- (Pérez-Arriaga, 1981).
Pérez-Arriaga I.J., Selective Modal Analysis with
Applications to Electric Power Systems, Ph.D. Thesis, Electrical Engineering,
Massachusetts Institute of Technology, June 1981.
84- (Pérez-Arriaga et al., 1982).
Pérez-Arriaga I.J., Verghese G.C. and Schweppe F.C.,
« Selective Modal Analysis with Applications to Electric Power Systems,
Part I: Heuristic Introduction », IEEE Trans. Power Apparatus and
Systems, vol. 101, pp. 3117-3125, Sept. 1982.
85- (Pohlheim, 2005).
Pohlheim H., GEATbx: Genetic and Evolutionary Algorithm Toolbox
for use with MATLAB, Version 3.7, November
2005.
www.geatbx.com/docu/index.html.
86- (Rashidi et al., 2004).
Rashidi F. and Rashidi M., « Tuning of Power System
Stabilizers via Genetic Algorithm for Stabilization of Power Systems »,
Innovations in Applied Artificial Intelligence Ed. Springer, pp.
1210-1219, Berlin 2004.
87- (Régnier, 2003).
Régnier J., Conception de systèmes
hétérogènes en génie électrique par
optimisation évolutionnaire multicritère, Thèse de
doctorat, Institut National Polytechnique de Toulouse, 2003.
88- (Rogers, 2000).
Rogers G., Power System Oscillations. Kluwer Academic
Publishers, Norwell, Massachusetts, 2000.
89- (Roosta, 2003).
Roosta A.R., Contribution à la commande
décentralisée non-linéaire des réseaux
électriques, Thèse de doctorat, Institut Nationale Polytechnique
de Grenoble, 2003.
90- (Sadeghzadeh, 1998).
Sadeghzadeh S.M., Amélioration de la stabilité
transitoire et de l'amortissement des oscillations d'un réseau
électrique à l'aide de SMES et de SSSC, Thèse de doctorat,
Institut Nationale Polytechnique de Grenoble, 1998.
91- (Sadicovic et al., 2006).
Sadicovic R., Andersson G. and Korba P., « Method for
Location of FACTS for Multiple Control Objectives », X SEPOPE
Conference, Brazil, May. 2006.
92- (Samouhi, 1983).
Samouhi F., Application de la méthode de Lyapounov
à l'étude de la stabilité dynamique de réseaux de
transport d'énergie soumis à des perturbations, Thèse de
doctorat, Institut Nationale Polytechnique de Grenoble, 1983.
93- (Sauer et al., 1998).
Sauer P. and Pai M., Power System Dynamics and
Stability, Upper. Saddle River, NJ: Prentice-Hall, 1998.
94- (Singh, 2004).
Singh R., A Novel Approach for Tuning of Power System
Stabilizer Using Genetic Algorithm, Ph.D. Thesis, Faculty of Engineering,
Indian Institute of Science, Bangalore, July 2004.
95- (Slotine et al., 1991).
Slotine J.J. and Li W., Applied nonlinear control,
Prentice Hall, Englewood Cliffs, New Jersey, January 1991.
96- (Snyder, 1999).
Snyder A.F., Les mesures synchronisées par GPS pour
l'amortissement des oscillations de puissance dans les grands réseaux
électriques interconnectés, Institut Nationale Polytechnique de
Grenoble, 1999.
97- (Snyder et al., 1998).
Snyder A.F., Hadjsaid N., Georges D., Mili L., Phadke A.G.,
Fawon O. and Wet S., « Inter-Area Oscillation Damping with Power System
Stabilizers and Synchronized Phasor Measurements », International
Conference on Power System Technology. vol. 2, pp. 790-794, Aug. 1998.
98- (Tolba, 2005).
Tolba A., Commande des systèmes d'énergie de
puissance par des approches heuristiques modernes, Thèse magister
Département Génie Electrique,ENP, Alger, 2005.
99- (Tomassini, 1999).
Tomassini, M., « Parallel and Distributed Evolutionary
Algorithms », in Evolutionary Algorithms in Engineering and Computer
Science, pp 113-133, J. Wiley & Sons,1999.
100- (Tse et al., 1988).
Tse C.T. and Tso S.K., « Design optimization of power
system stabilizers based on model and eigenvalue-sensitivity analysis »,
IEE Proc. C. Gen. Trans. & Distrib., 135, (5), pp. 406-415,
1988.
101- (Van Ness et al., 1994).
Van Ness J.E. and Dean F.D., « Interaction between
subsystems of a power system », Proc. American Control
Conference, Baltimore, pp. 1553-1557, June 1994.
102- (Wood, 2006).
Wood R.L., « Search space scaling in genetic
algorithm-based inverse analyses », Proc. Inst. Mech. Eng., B: Journal
of engineering manufacture, vol. 220, n° 5, pp. 715- 728, 2006.
103- (Xiao, 2003).
Xiao X., Dow E., Eberhart R., Ben Miled Z., and Oppelt R.J..
« Gene clustering using self-organizing maps and particle swarm
optimization ». Proceedings of Second IEEE International Workshop on
High Performance Computational Biology Nice, France, 2003.
104- (Yee et al., 2004).
Yee S.K. and Milanoviæ J.V., « Comparison of the
optimisation and linear sequential method for tuning of multiple PSSs ».
IEEE Power Engineering Society, General Meeting Denver, CO, June.
2004.
105- (Yu, 1983).
Yu Yao-Nan, Electric Power System Dynamics, Academic
Press 1983.
106- (Zhang et al., 2000).
Zhang P. and Coonick, H., « Coordinated Synthesis of PSS
Parameters in Multi-Machine Power Systems Using the Method of Inequalities
Applied to Genetic Algorithms », IEEE Trans. on Power Systems,
vol. 15, n° 2, pp. 811-816, May 2000.
107- (Zhou et al., 1991).
Zhou E.Z., Malik O.P. and Hope G.S., « Theory and Method
for Selection of Power System Stabilizer Location », IEEE Transaction
on Energy Conversion, vol. 6, n°. 1, pp. 170-176, 1991.
ANNEXES
Annexe A. Transformation de Park.
Afin d'établir les équations décrivant le
comportement du système globale, il est nécessaire de ramener les
grandeurs (décrits dans un repère local d-q) de chaque
générateur à un seul repère commun pour tous les
générateurs, il s'agit du repère D-Q, comme le
montre la figure (1A).
L'axe réel (D) du repère commun est
habituellement employé comme une référence pour mesurer
l'angle de rotor de machine. Pour une machine représentée en
détail comprenant la dynamique d'un ou plusieurs circuits de rotor,
l'angle ä de rotor est défini par l'angle entre l'axe
(q) de la machine et l'axe réel (D), comme il est
montré par la figure suivante.
Pour une machine représentée par un
modèle classique, l'angle de rotor ä est l'angle entre la
tension E' et l'axe réel
(D), (Chatelain, 1983). En régime dynamique,
l'angle ä se varie avec la vitesse de rotor.
Q
q
V
ä
á
D
ä
d
Figure 1A. Changement de
référentiel du repère local (d-q) au repère commun
(D-Q).
De la figure (1A), soit V un vecteur dans l'espace. Dans
le repère (D-Q), il s'écrit :
V ( DQ) = Ve (1A)
já
Alors que dans le repère (d-q), il s'écrit
:
V dq Ve (2A)
j ( )
á - ã
=
( )
Sachant que ã =ä- 90°,
l'équation (2A) devient :
V dq Ve e (3A)
j á j ä
- - °
( 90 )
=
( )
Ainsi, le passage d'un repère à l'autre s'effectue
par une simple rotation comme l'exprime l'équation suivante :
V dq V DQ e (4A)
j ( 90 )
° -ä
( ) ( )
=
En décomposant en parties réelle et imaginaire et
en regroupant sous forme matricielle, on obtient les équations
décrivant le passage d'un repère à l'autre:
? -
sin cos
ä ä ?
? ?
?cos sin ä ä ?
? V ?
D
? ?
? VQ ?
? V ?
d
? ?
? V q ?
? V ?
Q
? ?
? V D ?
?sin cos
ä ä ?
? ?
?
- cos sin
ä ä ?
? V ?
d
? ?
? V q ?
( ( ) )
C E S X X I
' + - ' Ä
ij qj ij qj dj qj ä j (10A)
Ä = ?
I Y
di ij
- Ä ? + ? ? Ä
Y S E Y C X X I
ij qj dj qj
( )
ij ij
qj ij
(5A)
Annexe B.
Modèle linéaire.
Appliquons la méthode de la linéarisation sur
l'ensemble des équations différentielles non-linéaires,
(31), (32), (33) et (34). Nous obtenons alors l'ensemble des équations
suivantes :
1
Ä & = Ä ? Ä ? Ä
ù i T T D
( )
mi ei i ù i (6A)
2 H i
Ä ä i = ù 0 Ä
ù i
1
& (7A)
Ä & ' =
E ( ( ) )
T '
qi
doi
Ä ? Ä ? ? ? ? Ä
E E X X I (8A)
fdi qi di di di
1
Ä & = ? Ä ? Ä ? Ä
E ( ( ) )
K V U E (9A)
fdi ai ti Si fdi
T ai
Pour obtenir le modèle d'état, nous devons
exprimer ces équations linéaires uniquement en fonction des
variables d'état. Pour ce faire, nous commençons par appliquer la
méthode de la linéarisation sur les deux composants du courant
Ii, décrits par les équations (39) :
Ainsi pour Idi :
Ä = Ä ä + Ä + Ä
[ ] [ ][ ] [ ][ ] [ ][ ]
I P Q E M I
' (11A)
d d d q d q
Où :
P Y C E S X X I j i (12A)
dij ij ij qj ij qj dj qj
= - + - ?
[ ' ( ' ) ]
P dii P dij (13A)
= - ?
j i
?
Qdij = -Y ij S ij (14A)
Mdij = Y ij C ij X qj -
X dj (1 5A)
( ' )
|
De même, en ce qui concerne le courant
Iqi, nous obtenons :
(1 ( )) ( ( ) )
- ? ? Ä = ? ' - - ' Ä
Y S X X I Y S E C X X I
ii ii qi di qi ij ij qj ij qj dj qj ä j
+ Ä ? + ? ? Ä
Y C E Y S X X I
ij ij qj ij ij qj dj qj
( )
|
(16A)
|
Ä = Ä ä + Ä (17A)
[ ][ ] [ ][ ] [ ][ ]
L I P Q E '
q q q q q
Où :
PY S E C X X I j i (18A)
qij ij ij qj ij qj dj qj
= - - - ?
[ ' ( ' ) ]
P qii P qij (19A)
= - ?
j i
?
Q qij = Y ij C ij (20A)
Lqii Y ii S ii X qi X di j
i
= 1 - ( - ' ) = (21A)
Lqij Y ij S ij X qj X dj j
i
= - ( - ' ) ? (22A)
Pour le calcul de tous les coefficients P, Q,
L et M, les valeurs initiales de
E'qj, Iqj, äj doivent
être utilisées.
En remplaçant successivement les matrices
[ÄId], [ÄIq], des équations (11A)
et (1 7A), nous obtenons tous calculs faits les solutions suivantes :
[ÄId]=[Yd][ÄE ' q
]+[Fd][Ää] (23A)
[ÄIq]=[Yq][ÄE'q]+[Fq][Ää]
(24A)
Où :
[Yd]=[Qd]+[Md][Yq]
(25A)
[Fd]=[Pd]+[Md][Fq]
(26A)
[ ] [ ] 1 [ ]
Y q L q - Q q
= (27A)
[ ] [ ] 1 [ ]
F q L q - P q
= (28A)
Le Calcul des constantes K1ij...K6ij : de la
linéarisation est réalisé de la façon suivante :
1. En Linéarisant l'équation du
couple électrique de la ième machine,
donnée par l'équation (35), nous obtenons :
Ä = + ? + ? Ä
T E X X I F X X I F
[( ( ) ) (( ) ) ]
' ' '
ei qi qi di di qij qi di qi dij ä j
|
+ + - + -
[( ( ) ) ((
E X X I Y X
' '
qi qi di di qij qi
|
X '
di
|
I Y E '
) ) ]
qi dij qj
Ä
|
(29A)
|
|
++ - + -
[( ( ) ) (( )
E X X I Y X X I
' ' '
qi qi di di qii qi di qi
|
|
Y I E '
) ]
dii qi qi
+ Ä
|
Ä = Ä ä + Ä + Ä (30A)
T K K E K E
' '
ei ij j ij qj ii qi
1 2 2
Où :
K1 ij =DtFdij +Q t F
qij (31A)
K ij D t Y dij Q t Y qij j
i
2 = + ? (32A)
K ii D t Y dii Q t Y
qii I qi j i
2 = + + = (33A)
Dt(
X qi X ' di ) I qi = - (34A)
Q
t = E ' qi + (Xqi - X '
di )I di (3 5A)
En remplaçant ÄTei tirée
de l'équation (30A) dans l'équation (6A), nous obtenons: 1
Ä = ? Ä ? Ä ? Ä ? Ä + Ä
ù& ä ù
( )
K K E K E D T
' ' (36A)
i 1 2
ij j ij qj ii qi i i mi
2
2H
2. La tension interne linéairisée
de la ième machine, donnée par
l'équation (8A), peut être réécrite comme suit :
(1 ) ( )
+ Ä = Ä ? ? Ä
ST E E X X I
' ' ' (37A)
do i qi fdi di di di
En remplaçant ÄIdi tirée
de l'équation (23A) dans cette dernière équation et en
arrangent le résultat, nous obtenons de même:
1
) (38A)
(1 ) (
' '
+ Ä = Ä ? Ä ? Ä
ST K E K E K
' ä E
doi ii qi ii fdi ij j
3 3 4 qj
K3 ij
Ä & = ? Ä ä ? Ä ? Ä +
Ä
1 1 1
' '
( E E
'
E E

K ) (39A)
qi T ' 4 ij j qj qi fdi
j
K K
doi 3 i3ii
Où :
K ij X di X di Y dij j i
3 [( ) ]
' -1 ?
= - (40A)
K ii X di X di Y dii j i
3 [1 ( ) ]
' -1
= + - = (41A)
K ij ( X di X ' di ) F
dij
4 = - (42A)
3. La linéarisation de l'équation
(38) représentant la tension terminale de la
ième machine et les équations (36), (37)
constituant les composantes de cette tension nous donne :
V ti ÄV ti =
Vdi Ä Vdi + V
qi ÄV qi (43A)
ÄV di = XqiÄIqi (44A)
ÄV qi = ÄE qi -
XdiÄIdi (45A)
En utilisant les équations (23A), (24A), pour exprimer
ÄIdi, ÄIqi dans l'équation (43A), nous
obtenons :
1 1 '
V X F V V X F ) ä
di qi qij ti qi di dij
? Ä
-
( )
V V X Y V V X Y V V E
- - -
1 1 ' 1 '
ti di qi qij ti qi di dij ti qi qi
? + Ä
ÄVti
(V -
ti
(46A)
ÄV ti = K ij Ä ä
j + K ij Ä E qj (47A)
'
5 6
Où :
|
K ij D v X qi F qij Q
v X ' di F dij
5 = -
|
(48A)
|
K D X Y Q X Y Q (49A)
ij v qi qij v di dij v
= - ' +
6
Dv V ti - 1 V di
= (50A)
Q
v V ti - 1 V qi = (51A)
En remplaçant
ÄVti tirée de l'équation (47A) dans
l'équation (9A), nous obtenons :
Ä & = - Ä ä - Ä + Ä ?
Ä
1 ( )
K K K K E K U E
'
E (52A)
fdi Ai ij j ai ij qj ai Si fdi
5 6
T ai
Annexe C.
Données du réseau de New England/New York (16
générateurs et 68 noeuds).
1. Données des noeuds du réseau
:
V : Amplitude de la tension du noeud (pu).
á : Angle de la tension (deg).
Pg : Puissance active de
génération (pu). Qg : Puissance
réactive de génération (pu). Pl
: Puissance active de charge (pu).
Ql : Puissance réactive de charge (pu).
|
Données des noeuds du réseau
|
|
Numéro
du noeud
|
V
(pu)
|
á°
|
Pg
(pu)
|
Qg
(pu)
|
Pl
(pu)
|
Ql
(pu)
|
|
01
|
1.000
|
0.00
|
0.000
|
0.00
|
2.527
|
1.1856
|
|
02
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
03
|
1.000
|
0.00
|
0.000
|
0.00
|
3.220
|
0.0200
|
|
04
|
1.000
|
0.00
|
0.000
|
0.00
|
5.000
|
1.8400
|
|
05
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
06
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
07
|
1.000
|
0.00
|
0.000
|
0.00
|
2.340
|
0.8400
|
|
08
|
1.000
|
0.00
|
0.000
|
0.00
|
5.220
|
1.7700
|
|
09
|
1.000
|
0.00
|
0.000
|
0.00
|
1.040
|
1.2500
|
|
10
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
11
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
12
|
1.000
|
0.00
|
0.000
|
0.00
|
0.090
|
0.8800
|
|
13
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
14
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
15
|
1.000
|
0.00
|
0.000
|
0.00
|
3.200
|
1.5300
|
|
16
|
1.000
|
0.00
|
0.000
|
0.00
|
3.290
|
0.3200
|
|
17
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
18
|
1.000
|
0.00
|
0.000
|
0.00
|
1.580
|
0.3000
|
|
19
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
20
|
1.000
|
0.00
|
0.000
|
0.00
|
6.800
|
1.0300
|
|
21
|
1.000
|
0.00
|
0.000
|
0.00
|
1.740
|
1.1500
|
|
22
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
23
|
1.000
|
0.00
|
0.000
|
0.00
|
1.480
|
0.8500
|
|
24
|
1.000
|
0.00
|
0.000
|
0.00
|
3.090
|
-0.920
|
|
25
|
1.000
|
0.00
|
0.000
|
0.00
|
2.240
|
0.4700
|
|
26
|
1.000
|
0.00
|
0.000
|
0.00
|
1.390
|
0.1700
|
|
27
|
1.000
|
0.00
|
0.000
|
0.00
|
2.810
|
0.7600
|
|
28
|
1.000
|
0.00
|
0.000
|
0.00
|
2.060
|
0.2800
|
|
29
|
1.000
|
0.00
|
0.000
|
0.00
|
2.840
|
0.2700
|
|
30
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
31
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
32
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
33
|
1.000
|
0.00
|
0.000
|
0.00
|
1.120
|
0.0000
|
|
34
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
35
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
36
|
1.000
|
0.00
|
0.000
|
0.00
|
1.020
|
-0.194
|
|
37
|
1.000
|
0.00
|
0.000
|
0.00
|
60.00
|
3.0000
|
|
38
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
39
|
1.000
|
0.00
|
0.000
|
0.00
|
2.670
|
0.1260
|
|
40
|
1.000
|
0.00
|
0.000
|
0.00
|
0.656
|
0.2353
|
|
41
|
1.000
|
0.00
|
0.000
|
0.00
|
10.00
|
2.5000
|
|
42
|
1.000
|
0.00
|
0.000
|
0.00
|
11.50
|
2.5000
|
|
43
|
1.000
|
0.00
|
0.000
|
0.00
|
0.000
|
0.0000
|
|
44
|
1.000
|
0.00
|
0.000
|
0.00
|
2.675
|
0.0484
|
|
45
|
1.000
|
0.00
|
0.000
|
0.00
|
2.080
|
0.2100
|
|
46
|
1.000
|
0.00
|
0.000
|
0.00
|
1.507
|
0.2850
|
|
47
|
1.000
|
0.00
|
0.000
|
0.00
|
2.031
|
0.3259
|
|
48
|
1.000
|
0.00
|
0.000
|
0.00
|
2.412
|
0.0220
|
|
49
|
1.000
|
0.00
|
0.000
|
0.00
|
1.640
|
0.2900
|
|
50
|
1.000
|
0.00
|
0.000
|
0.00
|
2.000
|
-1.470
|
|
51
|
1.000
|
0.00
|
0.000
|
0.00
|
4.370
|
-1.220
|
|
52
|
1.000
|
0.00
|
0.000
|
0.00
|
24.70
|
1.2300
|
|
53
|
1.045
|
0.00
|
2.500
|
0.00
|
0.000
|
0.0000
|
|
54
|
0.980
|
0.00
|
5.450
|
0.00
|
0.000
|
0.0000
|
|
55
|
0.983
|
0.00
|
6.500
|
0.00
|
0.000
|
0.0000
|
|
56
|
0.997
|
0.00
|
6.320
|
0.00
|
0.000
|
0.0000
|
|
57
|
1.011
|
0.00
|
5.052
|
0.00
|
0.000
|
0.0000
|
|
58
|
1.050
|
0.00
|
7.000
|
0.00
|
0.000
|
0.0000
|
|
59
|
1.063
|
0.00
|
5.600
|
0.00
|
0.000
|
0.0000
|
|
60
|
1.030
|
0.00
|
5.400
|
0.00
|
0.000
|
0.0000
|
|
61
|
1.025
|
0.00
|
8.000
|
0.00
|
0.000
|
0.0000
|
|
62
|
1.010
|
0.00
|
5.000
|
0.00
|
0.000
|
0.0000
|
|
63
|
1.000
|
0.00
|
10.00
|
0.00
|
0.000
|
0.0000
|
|
64
|
1.015
|
0.00
|
13.50
|
0.00
|
0.000
|
0.0000
|
|
65
|
1.011
|
0.00
|
35.91
|
0.00
|
0.000
|
0.0000
|
|
66
|
1.000
|
0.00
|
17.85
|
0.00
|
0.000
|
0.0000
|
|
67
|
1.000
|
0.00
|
10.00
|
0.00
|
0.000
|
0.0000
|
|
68
|
1.000
|
0.00
|
40.00
|
0.00
|
0.000
|
0.0000
|
Tableau 1A. Données des noeuds du
réseau. 2. Données des lignes du réseau
:
R : Résistance de la ligne (pu).
X : Réactance de la ligne (pu).
G : Conductance de chargement de la ligne (pu).
B : Susceptance de chargement de la ligne (pu). Rap : Rapport
de transformation.
|
Données des lignes du réseau
|
|
Du
Noeud
|
Au
Noeud
|
R
(pu)
|
X
(pu)
|
G
(pu)
|
B
(pu)
|
Rap
|
|
01
|
02
|
0.0070
|
0.0822
|
0.00
|
0.3493
|
0
|
|
01
|
30
|
0.0008
|
0.0074
|
0.00
|
0.4800
|
0
|
|
02
|
03
|
0.0013
|
0.0151
|
0.00
|
0.2572
|
0
|
|
02
|
25
|
0.0070
|
0.0086
|
0.00
|
0.1460
|
0
|
|
02
|
53
|
0.0000
|
0.0181
|
0.00
|
0.0000
|
1.025
|
|
03
|
04
|
0.0013
|
0.0213
|
0.00
|
0.2214
|
0
|
|
03
|
18
|
0.0011
|
0.0133
|
0.00
|
0.2138
|
0
|
|
04
|
05
|
0.0008
|
0.0128
|
0.00
|
0.1342
|
0
|
|
04
|
14
|
0.0008
|
0.0129
|
0.00
|
0.1382
|
0
|
|
05
|
06
|
0.0002
|
0.0026
|
0.00
|
0.0434
|
0
|
|
05
|
08
|
0.0008
|
0.0112
|
0.00
|
0.1476
|
0
|
|
06
|
07
|
0.0006
|
0.0092
|
0.00
|
0.1130
|
0
|
|
06
|
11
|
0.0007
|
0.0082
|
0.00
|
0.1389
|
0
|
|
06
|
54
|
0.0000
|
0.0250
|
0.00
|
0.0000
|
1.070
|
|
07
|
08
|
0.0004
|
0.0046
|
0.00
|
0.0780
|
0
|
|
08
|
09
|
0.0023
|
0.0363
|
0.00
|
0.3804
|
0
|
|
09
|
30
|
0.0019
|
0.0183
|
0.00
|
0.2900
|
0
|
|
10
|
11
|
0.0004
|
0.0043
|
0.00
|
0.0729
|
0
|
|
10
|
13
|
0.0004
|
0.0043
|
0.00
|
0.0729
|
0
|
|
10
|
55
|
0.0000
|
0.0200
|
0.00
|
0.0000
|
1.070
|
|
12
|
11
|
0.0016
|
0.0435
|
0.00
|
0.0000
|
1.060
|
|
12
|
13
|
0.0016
|
0.0435
|
0.00
|
0.0000
|
1.060
|
|
13
|
14
|
0.0009
|
0.0101
|
0.00
|
0.1723
|
0
|
|
14
|
15
|
0.0018
|
0.0217
|
0.00
|
0.3660
|
0
|
|
15
|
16
|
0.0009
|
0.0094
|
0.00
|
0.1710
|
0
|
|
16
|
17
|
0.0007
|
0.0089
|
0.00
|
0.1342
|
0
|
|
16
|
19
|
0.0016
|
0.0195
|
0.00
|
0.3040
|
0
|
|
16
|
21
|
0.0008
|
0.0135
|
0.00
|
0.2548
|
0
|
|
16
|
24
|
0.0003
|
0.0059
|
0.00
|
0.0680
|
0
|
|
17
|
18
|
0.0007
|
0.0082
|
0.00
|
0.1319
|
0
|
|
17
|
27
|
0.0013
|
0.0173
|
0.00
|
0.3216
|
0
|
|
19
|
20
|
0.0007
|
0.0138
|
0.00
|
0.0000
|
1.060
|
|
19
|
56
|
0.0007
|
0.0142
|
0.00
|
0.0000
|
1.070
|
|
20
|
57
|
0.0009
|
0.0180
|
0.00
|
0.0000
|
1.009
|
|
21
|
22
|
0.0008
|
0.0140
|
0.00
|
0.2565
|
0
|
|
22
|
23
|
0.0006
|
0.0096
|
0.00
|
0.1846
|
0
|
|
22
|
58
|
0.0000
|
0.0143
|
0.00
|
0.0000
|
1.025
|
|
23
|
24
|
0.0022
|
0.0350
|
0.00
|
0.3610
|
0
|
|
23
|
59
|
0.0005
|
0.0272
|
0.00
|
0.0000
|
0
|
|
25
|
26
|
0.0032
|
0.0323
|
0.00
|
0.5310
|
0
|
|
25
|
60
|
0.0006
|
0.0232
|
0.00
|
0.0000
|
1.025
|
|
26
|
27
|
0.0014
|
0.0147
|
0.00
|
0.2396
|
0
|
|
26
|
28
|
0.0043
|
0.0474
|
0.00
|
0.7802
|
0
|
|
26
|
29
|
0.0057
|
0.0625
|
0.00
|
1.0290
|
0
|
|
28
|
29
|
0.0014
|
0.0151
|
0.00
|
0.2490
|
0
|
|
29
|
61
|
0.0008
|
0.0156
|
0.00
|
0.0000
|
1.025
|
|
09
|
30
|
0.0019
|
0.0183
|
0.00
|
0.2900
|
0
|
|
09
|
36
|
0.0022
|
0.0196
|
0.00
|
0.3400
|
0
|
|
09
|
36
|
0.0022
|
0.0196
|
0.00
|
0.3400
|
0
|
|
36
|
37
|
0.0005
|
0.0045
|
0.00
|
0.3200
|
0
|
|
34
|
36
|
0.0033
|
0.0111
|
0.00
|
1.4500
|
0
|
|
35
|
34
|
0.0001
|
0.0074
|
0.00
|
0.0000
|
0.946
|
|
33
|
34
|
0.0011
|
0.0157
|
0.00
|
0.2020
|
0
|
|
32
|
33
|
0.0008
|
0.0099
|
0.00
|
0.1680
|
0
|
|
30
|
31
|
0.0013
|
0.0187
|
0.00
|
0.3330
|
0
|
|
30
|
32
|
0.0024
|
0.0288
|
0.00
|
0.4880
|
0
|
|
01
|
31
|
0.0016
|
0.0163
|
0.00
|
0.2500
|
0
|
|
31
|
38
|
0.0011
|
0.0147
|
0.00
|
0.2470
|
0
|
|
33
|
38
|
0.0036
|
0.0444
|
0.00
|
0.6930
|
0
|
|
38
|
46
|
0.0022
|
0.0284
|
0.00
|
0.4300
|
0
|
|
46
|
49
|
0.0018
|
0.0274
|
0.00
|
0.2700
|
0
|
|
01
|
47
|
0.0013
|
0.0188
|
0.00
|
1.3100
|
0
|
|
47
|
48
|
0.0025
|
0.0268
|
0.00
|
0.4000
|
0
|
|
47
|
48
|
0.0025
|
0.0268
|
0.00
|
0.4000
|
0
|
|
48
|
40
|
0.0020
|
0.0220
|
0.00
|
1.2800
|
0
|
|
35
|
45
|
0.0007
|
0.0175
|
0.00
|
1.3900
|
0
|
|
37
|
43
|
0.0005
|
0.0276
|
0.00
|
0.0000
|
0
|
|
43
|
44
|
0.0001
|
0.0011
|
0.00
|
0.0000
|
0
|
|
44
|
45
|
0.0025
|
0.0730
|
0.00
|
0.0000
|
0
|
|
39
|
44
|
0.0000
|
0.0411
|
0.00
|
0.0000
|
0
|
|
39
|
45
|
0.0000
|
0.0839
|
0.00
|
0.0000
|
0
|
|
45
|
51
|
0.0004
|
0.0105
|
0.00
|
0.7200
|
0
|
|
50
|
52
|
0.0012
|
0.0288
|
0.00
|
2.0600
|
0
|
|
50
|
51
|
0.0009
|
0.0221
|
0.00
|
1.6200
|
0
|
|
49
|
52
|
0.0076
|
0.1141
|
0.00
|
1.1600
|
0
|
|
52
|
42
|
0.0040
|
0.0600
|
0.00
|
2.2500
|
0
|
|
42
|
41
|
0.0040
|
0.0600
|
0.00
|
2.2500
|
0
|
|
41
|
40
|
0.0060
|
0.0840
|
0.00
|
3.1500
|
0
|
|
31
|
62
|
0.0000
|
0.0260
|
0.00
|
0.0000
|
1.040
|
|
32
|
63
|
0.0000
|
0.0130
|
0.00
|
0.0000
|
1.040
|
|
36
|
64
|
0.0000
|
0.0075
|
0.00
|
0.0000
|
1.040
|
|
37
|
65
|
0.0000
|
0.0033
|
0.00
|
0.0000
|
1.040
|
|
41
|
66
|
0.0000
|
0.0015
|
0.00
|
0.0000
|
1
|
|
42
|
67
|
0.0000
|
0.0015
|
0.00
|
0.0000
|
1
|
|
52
|
68
|
0.0000
|
0.0030
|
0.00
|
0.0000
|
1
|
|
01
|
27
|
0.0320
|
0.3200
|
0.00
|
0.4100
|
1
|
Tableau 2A. Données des lignes du
réseau. 3. Données des générateurs
:
Ra : Résistance d'armature (pu)
Xd : Réactance synchrone d'axe direct (pu).
X'd : Réactance transitoire d'axe direct (pu).
T'do : Constante de temps de la machine en circuit
ouvert (s). Xq : Réactance synchrone d'axe en
quadrature (pu).
H : constante d'inertie (s).
D : Coefficient d'amortissement du
générateur (pu).
|
Données des
générateurs
|
|
Numéro
du noeud
|
Ra
(pu)
|
Xd
(pu)
|
X'd
(pu)
|
T'do
(s)
|
Xq
(pu)
|
H
(s)
|
D
(pu)
|
|
53
|
0.00
|
1.8
|
0.55800
|
10.2
|
1.2420
|
2.3333
|
0.00
|
|
54
|
0.00
|
1.8
|
0.42529
|
6.56
|
1.7207
|
4.9494
|
0.00
|
|
55
|
0.00
|
1.8
|
0.38309
|
5.70
|
1.7098
|
4.9623
|
0.00
|
|
56
|
0.00
|
1.8
|
0.29954
|
5.69
|
1.7725
|
4.1629
|
0.00
|
|
57
|
0.00
|
1.8
|
0.36000
|
5.40
|
1.6909
|
4.7667
|
0.00
|
|
58
|
0.00
|
1.8
|
0.35433
|
7.30
|
1.7079
|
4.9107
|
0.00
|
|
59
|
0.00
|
1.8
|
0.29898
|
5.66
|
1.7817
|
4.3267
|
0.00
|
|
60
|
0.00
|
1.8
|
0.35379
|
6.70
|
1.7379
|
3.9150
|
0.00
|
|
61
|
0.00
|
1.8
|
0.48718
|
4.79
|
1.7521
|
4.0365
|
0.00
|
|
62
|
0.00
|
1.8
|
0.48675
|
9.37
|
1.2249
|
2.9106
|
0.00
|
|
63
|
0.00
|
1.8
|
0.25312
|
4.10
|
1.7297
|
2.0053
|
0.00
|
|
64
|
0.00
|
1.8
|
0.55248
|
7.40
|
1.6931
|
5.1791
|
0.00
|
|
65
|
0.00
|
1.8
|
0.33446
|
5.90
|
1.7392
|
4.0782
|
0.00
|
|
66
|
0.00
|
1.8
|
0.28500
|
4.10
|
1.7300
|
3.0000
|
0.00
|
|
67
|
0.00
|
1.8
|
0.28500
|
4.10
|
1.7300
|
3.0000
|
0.00
|
|
68
|
0.00
|
1.8
|
0.35899
|
7.80
|
1.6888
|
4.4500
|
0.00
|
Tableau 3A. Données des
générateurs.
4. Données des systèmes d'excitation
:
Ka : gain de l'AVR (pu).
Ta : constante de temps de l'AVR (s).
Efd _min : limite inférieure de la sortie de
l'AVR (pu). Efd_max : limite supérieure de la sortie de l'AVR
(pu).
|
Données des systèmes
d'excitation
|
|
Numéro
du
générateur
|
Ka
(pu)
|
Ta
(s)
|
Efdmin
(pu)
|
Efdmax
(pu)
|
|
01
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
02
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
03
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
04
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
05
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
06
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
07
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
08
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
09
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
10
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
11
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
12
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
13
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
14
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
15
|
200.0
|
0.05
|
-5.0
|
5.0
|
|
16
|
200.0
|
0.05
|
-5.0
|
5.0
|
Tableau 4A. Données des
systèmes d'excitation.
5. Données des turbines et des gouverneurs
:
wref : Vitesse de référence (pu).
KR : gain (pu).
Tmin : limite inférieure du couple
mécanique (pu).
Tmax : limite supérieure du couple
mécanique (pu).
Ts : constante de temps du régulateur
(s).
Tc : constante de temps du
servomécanisme (s).
T3 : constante de temps (s).
T4 : constante de temps (s).
T5 : constante de temps (s).
|
Données des turbines et des
gouverneurs
|
|
Numéro
du
générateur
|
wref
(pu)
|
KR
(pu)
|
Tmin
(pu)
|
Tmax
(pu)
|
Ts
(s)
|
Tc
(s)
|
T3
(s)
|
T4
(s)
|
T5
(s)
|
|
01
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
02
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
03
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
04
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
05
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
06
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
07
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
08
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
09
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
10
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
11
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
12
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
13
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
14
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
15
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
|
16
|
1
|
25.0
|
0.0
|
1.0
|
0.1
|
0.5
|
0.0
|
1.25
|
5.0
|
Tableau 5A. Données des turbines et
des gouverneurs.
Annexe D.
1. Paramètres des PSSs
réglés par la méthode de compensation de phase.
|
N° PSS
|
N° G.
|
KPSS
|
T1
|
T3
|
|
1
|
54
|
5.9975
|
0.1331
|
0.1331
|
|
2
|
55
|
6.8119
|
0.1118
|
0.1118
|
|
3
|
56
|
4.8717
|
0.1186
|
0.1186
|
|
4
|
57
|
7.6851
|
0.0971
|
0.0971
|
|
5
|
58
|
6.7587
|
0.1248
|
0.1248
|
|
6
|
59
|
6.2134
|
0.1099
|
0.1061
|
|
7
|
60
|
3.9810
|
0.1442
|
0.1442
|
|
8
|
61
|
7.1356
|
0.0913
|
0.0913
|
|
9
|
62
|
9.3381
|
0.1274
|
0.1274
|
|
10
|
63
|
4.9354
|
0.0913
|
0.0913
|
|
11
|
64
|
5.7692
|
0.1534
|
0.1534
|
|
12
|
65
|
22.9725
|
0.0692
|
0.0692
|
|
13
|
67
|
51.9431
|
0.0593
|
0.0593
|
|
14
|
68
|
19.7665
|
0.0677
|
0.0677
|
Tableau 6A. Paramètres des PSSs
réglés par la méthode de compensation de phase.
2. Les variables des paramètres constants
des PSSs : Tw,j = 10, T2,j = T4,j = 0.05 ; j
= 1, ..., NPSS
Annexe E.
1. Les valeurs choisies des paramètres de
l'AOEP.
|
Nombre de particules np
|
50
|
|
Nombre d'itérations itermax
|
250
|
|
coefficients de pondération c1 = c2
|
2
|
|
poids maximum wmax
|
0.9
|
|
poids minimum wmin
|
0.4
|
Tableau 7A. Valeurs choisies des
paramètres de l'AOEP.
2. Paramètres des PSSs optimisés
par la méthode d'AOEP.
|
N° PSS
|
N° G.
|
KPSS
|
T1
|
T3
|
|
1
|
54
|
25.4824
|
0.0355
|
0.0981
|
|
2
|
55
|
09.2126
|
0.0017
|
0.0010
|
|
3
|
56
|
40.0000
|
0.0933
|
0.0668
|
|
4
|
57
|
30.0858
|
0.0981
|
0.1000
|
|
5
|
58
|
31.8984
|
0.0135
|
0.0842
|
|
6
|
59
|
15.7518
|
0.0010
|
0.0077
|
|
7
|
60
|
00.3069
|
0.0328
|
0.0971
|
|
8
|
61
|
14.2201
|
0.0219
|
0.0010
|
|
9
|
62
|
39.8962
|
0.1000
|
0.1020
|
|
10
|
63
|
08.5534
|
0.0999
|
0.0982
|
|
11
|
64
|
38.2308
|
0.0878
|
0.0979
|
|
12
|
65
|
14.3286
|
0.1020
|
0.0015
|
|
13
|
67
|
39.9991
|
0.0013
|
0.0010
|
|
14
|
68
|
32.3618
|
0.0010
|
0.0021
|
Tableau 8A. Paramètres des PSSs
optimisés par la méthode d'AOEP.
3. Les variables des paramètres constants
des PSSs : Tw,j = 10, T2,j = T4,j = 0.02 ; j
= 1, ..., NPSS
| 

