1 INTRODUCTION
_ Les réseaux locaux industriels ont été
introduits petit à petit dans les systèmes automatisés,
à des stades divers selon les domaines d'application. Ils sont
nés avec le développement de l'électronique et des
matériels numériques programmables. L'apparition des
régulateurs numériques et des automates programmables a conduit
les offreurs à mettre sur le marché des réseaux pour les
interconnecter et rapatrier à moindre coût de câblage les
informations nécessaires à la conduite par les opérateurs
dans les salles de commande. C'est ainsi qu'est né le réseau WDPF
de Westinghouse (Jeumont- Schneider en France) dans les années 70. Ce
réseau était essentiellement utilisé dans les processus
continus, les premiers à être automatisés et à
innover dans les nouvelles technologies de l'automatique et de l'informatique
industrielle. Puis est né le réseau MODBUS (MODicon BUS) de Gould
Modicon, pour coordonner les activités sises sur plusieurs automates.
Dans les processus continus, des calculateurs dits d'optimisation
étaient utilisés de longue date pour envoyer des consignes sous
forme d'aides aux opérateurs. Il est apparu utile de les connecter d'une
part aux stations de travail des opérateurs et d'autre part aux
équipements qui pilotent les machines de production. Le grand
développement des réseaux locaux industriels date du début
des années 80. Le projet MAP naît aux États-Unis, la notion
de réseau de terrain émerge sous le nom de réseau ou bus
d'instrumentation en 1982 avec la naissance du projet
FIP en France
_ Parallèlement à ces projets de réseaux
ouverts, donc ayant vocation à devenir des normes internationales, en
l'absence de normes, et devant l'intérêt croissant des
réseaux, de nombreux réseaux locaux industriels privés
voyaient le jour chez tous les constructeurs et chez des offreurs
indépendants. En France, la société Gixi sortait Gixinet,
issu d'un brevet français sur l'accès à un bus par une
technique à jeton. La société Apsis, puis Aptor,
actuellement filiale de Cap Gemini, proposait les premières versions du
réseau FACTOR. La société Compex construisait le
réseau LAC. Les constructeurs d'automates programmables proposaient (la
liste est loin d'être exhaustive) Sinec (Siemens), Data Highway (Allen
Bradley), Tiway (Texas Instruments), Unitelway
(Télémécanique), Jbus (April), Sycoway (CGEE-Alsthom
devenu Cegelec). Les services fournis par les premières versions de ces
réseaux étaient le rapatriement d'informations vers des postes de
commande centralisée, la lecture et l'écriture de variables, le
démarrage ou la gestion de programmes, leur téléchargement
et quelques fonctions de service que l'on placerait maintenant dans la gestion
de réseau. Certains peuvent être considérés comme
les ancêtres des réseaux de terrain quand ils offraient la
possibilité de connecter des entrées/sorties
déportées. Chaque constructeur choisissait son profil à
partir de normes existantes dans les couches basses et définissait des
services et protocoles que l'on peut qualifier d'application adaptés
à ses clients et à ses marchés.
Ces réseaux utilisaient certains des protocoles
développés pour les télécommunications avec
quelques adaptations aux contextes de réseau local et du milieu
industriel. Par exemple le protocole HDLC a inspiré bon nombre de
protocoles de liaison de données, certes avec des simplifications; les
concepts de station maître et de station esclave étaient
directement repris des réseaux de transmission de données des
années 1960. La principale innovation de ces réseaux fut
d'introduire la notion de « données globale ». Ces
informations répertoriées issues de chacune des stations
étaient transmises périodiquement à toutes les autres de
façon à maintenir un état global approché du
système. Notons que cette innovation était due, et
particulièrement favorisée par lui, au fonctionnement des
équipements raccordés qui étaient essentiellement des
automates programmables à système exécutif mono
tâche périodique (on dit aussi parfois synchrones). Le
réseau tentait de reproduire le système
d'entrées-sorties.
Le développement de ces réseaux a
accompagné celui des architectures des systèmes. Il est difficile
de distinguer celui des deux phénomènes qui a
précédé l'autre ; ils se sont mutuellement
favorisés.
_ Il faut toutefois distinguer dans cette profusion de
produits, en général incompatibles, les réseaux
privés des constructeurs d'automates de ceux de sociétés
non constructeurs d'équipements, mais plutôt
sociétés de service, qui devaient pour leurs clients connecter
des équipements hétérogènes grâce à
leur réseau. C'est ainsi que sont nés les « communicateurs
» qui étaient des appareils de raccordement des automates ou des
calculateurs au réseau. Ils implémentaient quelques couches du
profil du réseau. Les équipements y étaient
raccordés par des lignes séries synchrones ou asynchrones, ou par
des liaisons parallèles comme le standard GPIB. Ultérieurement,
ces fonctions de communication ont été implantées sur des
cartes compatibles aux bus internes des machines, et enfichables directement
dans les « racks ».
À l'origine, ces réseaux étaient
conçus à partir des connaissances issues des
télécommunications en reprenant des protocoles existants. Ce
n'est que dans une deuxième étape que l'analyse des architectures
des systèmes automatisés a conduit à identifier des
besoins spécifiques et donc à définir des services et des
protocoles spécifiques au(x) domaine(s) industriel(s).
2. Réseau
On appelle réseau un ensemble de moyens qui permettent
la communication entre des processus d'application ou tâches
répartis sur des matériels informatiques de tout type. Cet
ensemble est constitué d'au moins un support de transmission pour
l'acheminement des signaux, et de protocoles de communication selon une
architecture en couches conforme ou non au modèle OSI (Open System
Interconnections)
On parle parfois de système de communication pour
désigner le mot réseau.
Remarque
On dit souvent qu'un réseau connecte des machines, ce
qui est une réalité, mais en fait il permet surtout la
communication entre les tâches qui s'exécutent sur les
machines.
Topologies des réseaux
La topologie d'un réseau est caractérisée
par le système de câblage du réseau ; c'est la partie
physique du réseau
· Point à
point
C'est la forme la plus élémentaire qui implique
deux machines. Elle correspondra souvent à la topologie d'une partie
d'un réseau. En général, cela concerne une liaison
série dont les vitesses sont vite limitées par la distance,
l'utilisation de la fibre optique pouvant compenser cette
faiblesse.

· Etoile
Une approche ancienne, non normalisée, correspondait
à une organisation de machines esclaves reliées par liaisons
point à point à une machine maître. Aujourd'hui cette
topologie correspond soit au câblage par étoile passive soit
à celui d'un autocommutateur privé (PABX) ou à un Hub
(équipement statique qui simule un réseau local auquel sont
raccordés des abonnés par dérivations, certains hubs
pouvant être raccordés à un réseau principal). Le
noeud central n'est pas un abonné du réseau mais une unité
de distribution dont le bon fonctionnement est indispensable à la
communication. Cette dernière correspond à une partie de
réseau (exemple des PC familiaux rattachés à un serveur
Internet ou à un réseau local de stations connectées
à un serveur), dans la mesure où les équipements sont peu
nombreux car le coût de câblage devient vite prohibitif et les
performances douteuses.

· Bus
C'est la topologie la plus commune aux LAN (Local Access Network)
car la plus économique. Chaque noeud est raccordé au bus par
l'intermédiaire de modules de dérivation actifs ou passifs
suivant le protocole de réseau.

· Arbre
Chaque noeud peut être un abonné ou un hub. C'est
une variante de la topologie en étoile avec les mêmes faiblesses.
Cette architecture revient en force avec les techniques du type Ethernet en
fibre optique 10 base F et Ethernet commuté du type 100 base VG (le
réseau est découpé en tronçons reliés par
des ponts qui filtrent les trames en fonction du destinataire diminuant ainsi
les collisions ; l'extrême est d'associer la fonction pont filtrant
à chaque coupleur d'abonné, pour éliminer ainsi les
collisions).

· Maille
C'est la forme classique d'organisation WAN (World Access
Network). Les équipements sont reliés entre eux pour former une
toile (Web) d'araignée (comme Internet). Chaque noeud a un rôle de
routeur. Pour atteindre un noeud, les chemins sont multiples et choisis en
fonction de critères comme la disponibilité d'un noeud ou d'un
WAN, la qualité de transmission ou la charge ponctuelle sur un
tronçon WAN donné.

· Anneau
Chaque noeud est relié à ses voisins pour former
une boucle fermée et a un rôle actif dans la propagation des
échanges. Cette structure est bien adaptée aux LAN, en
particulier si l'on recherche la disponibilité.Une rupture de liens
entre deux noeuds peut être gérée pour garantir la
communication. Chaque noeud a la possibilité de
régénérer le signal et la structure se prête
facilement à l'utilisation de la fibre optique, les distances de
couverture pouvant être grandes.

3. Les réseaux informatiques
Les réseaux informatiques sont nés du besoin de
relier des terminaux distants à un site central puis des ordinateurs
entre eux et enfin des machines terminales, telles que des stations de travail
ou des serveurs. Dans un premier temps, ces communications étaient
destinées au transport de données informatiques. Aujourd'hui,
l'intégration de la parole téléphonique et de la
vidéo sur ces réseaux informatique devient naturelle, même
si cela ne va pas sans difficulté.
On compte généralement quatre catégories
de réseaux informatiques, différenciées par la distance
maximale séparant les points les plus éloignés du
réseau (la figure 1.4 illustre sommairement ces
catégories) :
· La plus petite taille de réseaux définit
les PAN (Personal Area Network). Ces réseaux personnels interconnectent
sur quelques mètres les équipements personnels tels que GSM,
portable, organiseurs, etc., d'un même utilisateur.
· Les réseaux locaux, également
appelés LAN (Local Area Network). Correspondent par leur taille aux
réseaux intra entreprise. Ils servent au transport de toutes les
informations numériques de l'entreprise. En règle
générale, les bâtiments à câbler
s'étendent sur plusieurs centaines de mètres. Les débits
de ces réseaux vont aujourd'hui de quelques mégabits à
plusieurs centaines de mégabits par seconde.
· Les réseaux métropolitains, ou MAN
(Metropolitan Area Network), permettent l'interconnexion des entreprises ou
éventuellement des particuliers sur un réseau
spécialisé à haut débit qui est géré
à l'échelle d'une métropole. Ils doivent être
capables d'interconnecter les réseaux locaux des différentes
entreprises pour leur donner la possibilité de dialoguer avec
l'extérieur.
· Les réseaux étendus, ou WAN (Wide Area
Network), sont destinés, comme leur nom l'indique, à transporter
des données numériques sur des distances à
l'échelle d'un pays, voir d'un continent ou de plusieurs continents. Le
réseau est soit terrestre, et il utilise en ce cas des infrastructures
au niveau du sol, essentiellement de grands réseaux de fibre optique,
soit hertzien, comme les réseaux satellite.
Réseaux
Métropolitains
Réseaux
étendus
Réseaux locaux
Réseau
Personnel
PAN LAN MAN
WAN
1m 10m 100m 1km 10km
100km
Figure 1.4 : Les différentes
catégories de réseaux informatiques
· les techniques utilisées par ces réseaux
informatiques proviennent toutes du transfert de paquets, comme le relais de
trames, Ethernet, les réseaux IP, etc.
· une caractéristique essentielle de ces
réseaux informatiques, qui les différentie totalement des autres
catégories de réseaux, provient de la gestion et du
contrôle du réseau qui sont effectués par les
équipements terminaux. Par exemple, pour qu'il n'y ait pas
d'embouteillage de paquets dans le réseau, l'équipement terminal
doit se réguler lui-même pour ne pas inonder le réseau de
paquets. Pour se réguler, l'équipement terminal mesure le temps
de réponse aller-retour. Si ce temps de réponse grandit trop, le
terminal ralentit son débit. On peut traduire cette fonction par le fait
que l'intelligence du réseau se trouve dans les machines terminales, c
à d dans les machines commercialisées par l'industrie
informatique, d'où leur nom de réseau informatique.
L'intérieur de réseau est généralement des plus
simple, constitué de noeuds de transfert élémentaires et
de lignes de communication. Le coût du réseau est surtout
représenté par les équipements terminaux, qui
possèdent toute la puissance nécessaire pour réaliser,
contrôler et maintenir les communications.
· Les réseaux informatiques forment un environnent
asynchrone. Les données arrivent aux récepteurs à des
instants qui ne sont pas définis à l'avance, et les paquets
peuvent mettre un temps plus ou moins long à parvenir à leur
destinataire en fonction de la saturation du réseau. Cette
caractéristique explique la difficulté de faire passer de la
parole téléphonique dans ce type de réseau, puisque cette
application, fortement synchrone, nécessite de remettre au
combiné téléphonique des octets à des instants
précis.
· Aujourd'hui, le principal réseau informatique est
représenté par internet. Le réseau internent transporte
des paquets dits IP (Internet Protocol), qui ont une structure précise.
Plutôt que de parler de réseau de réseau Internet, nous
préférons parler de réseau IP, qui marque une plus grande
généralité.
Les réseaux IP sont des réseaux qui transportent
des paquets IP d'une machine terminale à une autre. En un certain sens,
Internet est un réseau IP particulier. D'autres réseaux, comme
les réseaux intranet, transportent également des paquets IP, mais
avec des caractéristiques différentes d'Internet.
4. Réseau local
On appelle réseau local un réseau qui couvre une
zone géographique limitée, par opposition aux réseaux
publics ou longue distance. Ce fait permet, en particulier, de choisir des
protocoles indépendamment des organisations de PTT.
Parmi les réseaux locaux, on distingue souvent les
réseaux locaux d'entreprise et les réseaux locaux industriels.
Ils diffèrent essentiellement par les contraintes d'environnement (temps
et sûreté de fonctionnement) et par certains services et
protocoles mis en oeuvre pour tenir compte des différences de besoins
des applications qui les utilisent.
5. Réseau local industriel
Un réseau local industriel est en première
approximation un réseau local utilisé dans une usine ou tout
système de production pour connecter diverses machines afin d'assurer la
commande, la surveillance, la supervision, la conduite, la maintenance, le
suivi de produit, la gestion, en un mot, l'exploitation de l'installation de
production.
Mais l'aspect connexion de machines, même s'il est
fondamental, n'est pas le seul à considérer. Ce sont surtout les
processus d'application répartis sur les machines qui sont mis en
relation par les réseaux. Et ce sont ces types de relations qui
dicteront le choix d'un réseau plutôt que d'un autre. Les besoins
en communication sont alors très diversifiés selon les
matériels connectés et les applications qu'ils supportent, ce qui
explique que les réseaux locaux industriels sont nombreux et
variés. Il est évident que le trafic entre des capteurs, des
actionneurs et des automates n'est pas le même qu'entre un système
de CFAO et un contrôleur de cellule de fabrication. Les besoins
diffèrent selon des critères comme la taille des données
à transmettre, les contraintes de temps associées, les
coûts acceptables de connexion, les technologies qu'il est possible de
mettre en oeuvre. Il sera donc nécessaire d'étudier globalement
les architectures des systèmes automatisés pour analyser en
détail les divers types de communication et classer les réseaux
locaux industriels. Pour satisfaire tous ces besoins, de très divers
protocoles ont été définis depuis une quinzaine
d'années, certains ont été normalisés, d'autres
sont devenus des standards de fait, d'autres enfin sont purement
privés.
Remarque
On retrouvera des caractéristiques voisines dans des
systèmes autres que ceux de production, par exemple dans la domotique ou
l'immotique, ainsi que dans les systèmes de transport (trains,
automobiles)
6. POURQUOI UN RESEAU DE TERRAIN ?
6-1 Les avantages
PRINCIPAL AVANTAGE : Réduction des
coûts
REDUCTION DES COUTS INITIAUX :
- Réduction massive du câblage : 1 seul câble
en général pour tous les équipements au lieu d'un par
équipement
- Possibilité de réutiliser le câblage
analogique existant dans certains cas
- Réduction du temps d'installation
- Réduction du matériel nécessaire à
l'installation
REDUCTION DES COUTS DE MAINTENANCE :
- Complexité moindre donc moins de maintenance
(fiabilité accrue)
- Maintenance plus aisée : temps de dépannage
réduit, localisation des pannes possibles grâce à des
diagnostics en ligne («on line») donc à distance
- Outils de test dédiés (analyseur...)
- Flexibilité pour l'extension du bus de terrain et pour
les nouveaux raccordements
PERFORMANCES GLOBALES ACCRUES :
- Précision : communications numériques :
la donnée numérique transférée est sans erreur de
distorsion, de réflexion... contrairement à un signal
analogique
- Les données et mesures sont généralement
disponibles à tous les équipements de terrain
- Communications possibles entre 2 équipements sans passer
par le système de supervision
- La structure distribuée permet de faire résider
des algorithmes de contrôle au niveau de chaque équipement de
terrain (chaque noeud)
- Accès à des variables multiples pour un noeud
6-2 AUTRES AVANTAGES
- Interopérabilité importante grâce au souci
de standardisation (système ouvert) aux niveaux hard et soft
· Choix pour l'utilisateur final : prix, performances,
qualité...
· Le standard profite à l'utilisateur et non pas au
vendeur
· Possibilité de connexion d'équipements de
différents fournisseurs respectant le même standard
· Echange de données par des mécanismes
standard (protocoles)
-Modélisation objet des équipements et de leur
fonctionnalité : modèle de bloc fonctionnel aidant l'utilisateur
à créer et superviser son bus de terrain
7. Modèle de référence OSI de
l'ISO
7.1 Origine du modèle
Afin de simplifier la définition des normes de
communication, en les situant les unes par rapport aux autres, l'organisation
internationale de normalisation (ISO) a lancé en 1977 un projet de
définition d'un modèle de référence pour
l'interconnexion de systèmes ouverts, appelé simplement «
modèle OSI » ou
« Modèle de référence OSI ». La
version finale du modèle OSI date de 1984.
Il a été défini à partir des
expériences dans les réseaux publics, mais a dû
ultérieurement être adapté aux réseaux locaux.
Un système est dit ouvert lorsqu'il permet la
communication entre équipements de types différents, pouvant
provenir de constructeurs différents, pourvu que ces équipements
respectent les règles de communication dans un environnement OSI. Les
règles de communication sont publiques, accessibles à tous.
Et inversement, un système est dit privé, lorsqu'il
ne permet la communication qu'entre des équipements d'un même
type, ou d'un même constructeur, en utilisant des protocoles qui sont la
propriété de quelqu'un. On qualifie parfois ces systèmes
de « propriétaires » (en anglais : proprietary).
Nous considérons aussi comme privés, les
systèmes multipropriétaires dans lesquels on peut accéder
à des spécifications privées moyennant des accords avec le
propriétaire. On dit aussi parfois que ces systèmes sont
fermés ; mais en fait, ils ne le sont jamais complètement
7.2 Couches du modèle OSI
Le modèle OSI constitue un cadre de
référence pour l'interconnexion de systèmes ouverts
hétérogènes. Il s'agit d'un modèle pour
élaborer des normes d'interconnexion et de coopération de
systèmes répartis. Il est construit selon une structure en sept
couches qui correspondent chacune à un type de préoccupation ou
à un type de problème à résoudre pour pouvoir
communiquer (figure 1).
L'idée de base de la structure en couches est, comme dans
d'autres domaines, de pouvoir à chaque interface ignorer le plus
possible ce qui se passe en dessous. Le modèle est applicable à
toutes les catégories de réseaux. Nous rappelons
brièvement le rôle de chaque couche.
Les sept couches initiales du modèle sont rappelées
par la figure 1.

Figure1-le
modèle OSI
Les couches 1, 2, 3, et 4se préoccupent du transport
d'informations et masquent aux couches supérieures les problèmes
liés à la communication d'informations entre des
équipements distants. Les couches 5, 6 et 7 fournissent des services
d'accès à la communication pour différents types
d'applications.
_ La couche physique adapte les signaux numériques
au support de transmission.
_ La couche liaison de données fiabilise les
échanges de données entre deux stations.
_ La couche réseau assure la recherche d'un chemin
et l'acheminement des données entre les stations terminales dans un
réseau maillé.
_ La couche transport assure le contrôle de bout en
bout entre les stations terminales.
_ La couche session synchronise et gère les
échanges pour le compte de la couche présentation.
_ La couche présentation permet d'accepter des
syntaxes différentes pour les données échangées
entre les couches application.
_ La couche application donne aux processus d'application
le moyen d'accéder à l'environnement OSI. Elle n'a pas de limite
supérieure, c'est-à-dire que l'on peut toujours ajouter des
services supplémentaires construits sur des services existant
déjà.
La gestion de réseau est un ensemble de fonctions de
paramétrage, de configuration, d'exploitation et de surveillance pour
permettre le bon fonctionnement du réseau.
7.3 Extensions du modèle OSI
L'émergence des réseaux locaux et plus
généralement les études de nouveaux protocoles, en
particulier de la couche application, ont conduit à découper ou
structurer ces sept couches.
_ Une couche de gestion d'accès au support de transmission
(en anglais Medium Access Control ou MAC) est apparue entre la couche physique
et la couche liaison de données. Elle permet de gérer le droit
d'émission des stations connectées à un support
partagé par plusieurs.
Dans ce cas, la couche liaison a été
renommée contrôle logique de liaison (en anglais Logical Link
Control ou LLC). Cette extension de l'architecture initiale est connue sous le
nom de IEEE 802, du nom du groupe de travail qui l'a créée.
_ La couche réseau a elle-même été
structurée en trois souscouches pour faciliter les interconnexions de
réseaux locaux et de réseaux locaux avec les réseaux
publics.
_ La couche application a aussi été
structurée avec l'expérience.
Des développements parallèles de protocoles ont
montré que des services communs pouvaient et même devaient (pour
faciliter l'ouverture) être définis d'une seule façon, ce
qui a conduit à la norme ISO 9545 intitulée Structure de la
couche application.
Le modèle OSI n'est pas seulement une architecture en
couches, il introduit aussi des concepts qui peuvent être
appliqués à la plupart des couches.
7.4 Concepts du modèle OSI
Le modèle OSI définit non seulement les sept
couches bien connues, mais aussi et surtout, des concepts, des principes, des
mécanismes qui peuvent s'appliquer ou être mis en oeuvre a
priori dans toutes les couches. Les sujets que nous traitons ci-dessous
sont :
-- les notions de service et de protocole ;
-- les transmissions en point à point, en multipoint ou en
diffusion ;
-- les communications avec connexion ou non ;
--- les protocoles avec ou sans acquittement ;
--- le contrôle de flux ;
D'autres principes ou règles comme l'adressage ne seront
pas étudiés ici, car ils intéressent plus les concepteurs
de protocoles que les utilisateurs. Il suffit de supposer qu'un processus
d'application sait désigner son ou ses correspondants, sans regarder
comment la désignation et l'adressage sont réalisés.
Remarque
On peut comparer l'empilement des services et protocoles à
un jeu de Lego dans lequel toutes les briques ne respecteraient pas la
même norme pour être encastrées les unes dans les autres.
Elles peuvent alors posséder des plots différents. Une brique du
jeu dispose de plots mâles à son interface supérieure et de
plots femelles à son interface inférieure. Pour pouvoir empiler
deux plots, il est nécessaire que des plots mâles soient
complètement compatibles avec des plots femelles.
7.5 Conclusion
Le modèle OSI est la référence pour
étudier et comparer différents réseaux. Nous en avons
présenté les principaux concepts. Les choix de services possibles
dans une couche sont multiples. Et les choix de protocoles encore plus
nombreux. La notion de profil est primordiale pour assurer
l'interopérabilité des équipements.
8-LES RESAUX DE TERRAINS EXISTANTS :
Parmi les réseaux de terrain existant on trouve :
8-1 Interbus :
Interbus est un système performant et facile à
mettre en oeuvre pour des applications standard d'API avec des
entrées/sorties numériques. La carte maître Interbus se
comporte comme une carte d'entrées/sorties internes et ne
nécessite pas de programmation.
Interbus, avec l'apparition d'interbus-Loop, constitue une
solution courante pour l'automatisation de process.
La quatrième génération d'Interbus met
à disposition des utilisateurs des caractéristiques
étendues dont les plus importantes sont les suivantes :
· Possibilité de 62 canaux de paramètre pour
les données complexes,
· Structures en arbre jusqu'à 16 niveaux,
· Communication transversale entre deux abonnés
(communication esclave-esclave),
· Pré-traitement des données pour diminuer la
charge de la commande centrale,
· Utilisation en mode synchrone.
Dans un système à intelligence répartie, au
sein duquel la communication de haut niveau représente un critère
essentiel pour les cartes intelligentes, Interbus présente des
faiblesses quant aux temps de transmission et à ses possibilités
de diffusion et de fonctionnement en mode Multi-maître.
8-2 Profibus-FMS/PA
Profibus est issus d'un projet allemand dont les participants
étaient entre autres :
Bosch, Klochner-Moeller et siemens. La spécification de
Profibus est normalisée
(DIN 19245, Parties 1 et 2). Les variantes de Profibus, FMS et
DP, sont reprises par la norme EN50170.
A l'issue de ce projet, les partenaires initiaux ont fondé
l'organisation des utilisateurs Profibus.
Des extensions aux couches 1 et 2 ont été
étudiées dans le cadre de l'ISP (Interoperable System Project)
Le réseau Profibus-PA (Process Automation) s'appuie sur
ces extensions.
Profibus FMS est adapté aux communications de haut niveau.
En raison de la vitesse de transmission relativement réduite et de la
manipulation importante des télégrammes, l'utilisation de
Profibus FMS surtout destinée à des installations
nécessitant un transfert de peut de télégrammes, ou des
exigences sont connectées et dont les exigences temps-réel sont
peut élevées.

PROFIBUS FMS
8-3 LON :
LON (Local Operating Network) est un système de
communication développé par la société
américaine Echelon pour les applications réparties telles que
l'automatisation des bâtiments, la productique, le stockage, le convoyage
ainsi que pour l'alimentation en eau, gaz et électricité.
LON ne peut être directement assimilé au niveau
capteur/ actionneur ni aux niveaux de communication supérieur. Au
contraire, il a pour objectif de répartir les tâches de commande
en petites tâches à exécuter sous forme
décentralisée, de manière similaire à l'esprit
client-serveur. Des décisions doivent être prises directement dans
les noeuds du réseau, sans autres systèmes de bus ou composants,
et sans par exemple, affecter la charge des ordinateurs supérieurs. Ce
type de communication est aussi appelé système
« d'automatisation intelligente
décentralisée ». LON supporte, au niveau du
réseau, la répartition et la gestion de variables.
8-4 AS-Interface
AS-Interface (Actuator Sensor Interface) est le fruit d'un
développement commun de onze fabricants de capteurs/actionneurs, de
système de commande et de deux instituts universitaires. L'objectif de
ce développement était de mettre à disposition un
système simple, sûr, rapide et de remplacer par une paire non
blindée le câblage traditionnel au niveau terrain.
L'Association AS-Internatinal assure la diffusion du bus et
regroupe les membres et les utilisateurs. Des développeurs, des
fabricants, des centres de recherches et des universités appartiennent
à cette association.

AS
interface
8-5 WorldFIP :
Le réseau FIP (Factory Instrumentation Protocol) est
l'aboutissement d'un travail de développement franco-italien. La
promotion et une part d'assistance technique de ce réseau de terrain
sont effectuées par l'organisation WorldFIP, qui cherche à
diffuser internationalement ce réseau.
WorldFIP offre un réseau flexible au sein duquel aussi
bien la transmission périodique des données numériques
d'entrées-sorties que des communications apériodiques
d'information de haut niveau (transmission de paramètres, par exemple)
sont possibles.
Un débit de transmission élevé est
réalisable sur WorldFIP même sur de longues distances.
Les possibilités du trafic périodique font de
WorldFIP un réseau déterministe qui garantit la cohérence
temporelle de l'information ; notons que des mécanismes
sophistiqués dits de « rafraîchissement » et
de « promptitude » permettent de détecter la
viabilité d'information.
Comme il existe aussi autre réseaux : Bitbus, ARCNET,
SERCOS, Modbus Plus, Modbus/jbus...etc.
9-CAN COMME UN BUS DE TERRAIN :
1-Présentation du bus CAN
Au début des années 1980, les voitures
commençaient à intégrer des systèmes
électroniques gérant plusieurs applications
électriques.
Dans une première phase, ces systèmes
opéraient indépendamment les uns des autres. Les
équipementiers de voitures se sont alors rendus compte du
problème que pose l'encombrement de ces systèmes et la
complexité de leur câblage.
En 1983, le bus CAN (Controller Area Network) a été
conçu par la société allemande Robert BOSCH Gmbh pour
répondre aux besoins de communication interne dans les automobiles :
multiplexage de commandes électriques, fiabilité, diagnostic,
compatibilité électromagnétique, commandes d'organes
(suspension, frein, contrôle moteur). Son exploitation ne commence
qu'à partir de 1985 où une convention entre BOSCH et Intel a
permis d'implanter le protocole CAN dans des circuits Intel. En 1986, la
première standardisation du bus par l'ISO (International Standard
Organization) a vu le jour. En 1987, Intel produit le premier contrôleur
CAN, le 82526. La première voiture multiplexée à utiliser
le bus CAN comme support de transmission a été
réalisée en 1991 (avec un débit de 500 kbit/s). En 1995,
il y a eu 10 millions de circuits CAN vendus dont 6 millions pour des
applications hors véhicules. Les projections de vente pour 2000 sont de
l'ordre de 600 millions.
La première spécification du bus CAN était
propre aux applications dans l'automobile. Une classification formelle a
été établie au travers des activités de la SAE
(Society of Automotive Engineers) :
-- applications classe A : elles concernent les communications
sans effet sur la sécurité du conducteur entre noeuds non
intelligents assurant les fonctions de confort, de commande ou d'affi-chage
(par exemple commande des vitres et de sièges électriques, feu de
stop...). Les informations échangées sont courtes (1 octet) et
sont véhiculées sur un fil (le châssis jouant le rôle
de masse) à une vitesse typique de 1 kbit/s. Le coût de ces noeuds
doit être très faible ;
-- applications classe B : mêmes informations qu'en classe
A, mais sur plusieurs octets (par exemple pour le contrôle de l'air
conditionné). La vitesse de transmission passe à 10 kbit/s ;
-- applications classe C : pour les informations
nécessitant un transfert en temps réel avec un temps de cycle
inférieur à 10 ms et un temps de latence inférieur
à 1 ms (exemple : transfert de données entre l'injection
électronique et la boîte de vitesse automatique). Les informations
sont sur quelques octets et leur débit peut aller jusqu'à
1 Mbit/s ;
-- applications classe D : concernent des paquets d'informations
sur des centaines d'octets nécessitant des temps de transfert de l'ordre
de la seconde et donc des débits jusqu'à 10 Mbit/s. Comme
exemple, citons la radiotéléphonie et les systèmes de
navigation basés sur les GPS.
Cette classification a été simplifiée par
l'ISO qui est arrivé à une classification simple et pragmatique
en retenant deux classes d'applications :
-- vitesse de transmission lente définie comme
étant inférieure à 125 kbit/s ;
---vitesse de transmission élevée
considérée comme étant supérieure à 125
kbit/s.
Le CAN est un système de communication, en temps
réel, par liaison série conçu pour relier des composants
intelligents ainsi que des capteurs et des actionneurs dans une machine ou un
procédé. Il possède des propriétés
multimaîtres, c'est-à-dire que plusieurs noeuds peuvent
simultanément demander l'accès au bus. Le CAN ne possède
pas de système d'adressage mais plutôt un système
d'allocation de priorités aux messages basé sur l'identificateur
attribué à chaque message. Un émetteur transmet un message
sans indication de destinataire ; sur la base de l'identificateur
associé à ce message, chaque noeud décide de traiter ou
d'ignorer ce message. Dans le CAN, le protocole de communication est
assuré par des composants électroniques.
2. Grands principes du bus CAN
Le bus CAN est un réseau local possédant les
mêmes particularités que les réseaux locaux en
général. L'objet essentiel d'un réseau est de permettre le
transfert de données d'au moins un point source vers au moins un point
de destination.
Devant la diversité de leurs caractéristiques, une
communication entre les réseaux ne pouvait être réalisable
si elle n'avait pas fait l'objet d'une normalisation rigoureuse. D'où la
définition d'un modèle de structuration de protocole pour les
modèles ouverts appelé OSI (Open Systems Interconnection) de
l'ISO.
2.1 Couches ISO du bus CAN
La norme ISO 11519 du bus CAN spécifie :
· dans sa partie A, un champ d'identification sur 11 bit
(format dit standard)
· dans sa partie B, un champ d'identification sur 29 bit
(format dit étendu)
Nota : dans ce recueil, on présentera uniquement
le format standard.
Cette norme définit une partie de la couche 1, au sens de
la normalisation
ISO qui s'occupe de la définition du signal physique, de
l'interface électrique et du codage des bits ainsi que de la
totalité de la couche 2 (liaison de données).
L'architecture de communication considérée est
comparable à celle d'un réseau local ; elle est limitée
à trois couches (figure 2) qui sont, de haut en bas : la couche
application, la sous-couche LLC ( Logical Link Control ), la sous-couche MAC (
Medium Access Control ) et la couche physique.
2.1.1 Couche application
Cette couche fournit les services nécessaires à la
gestion des tâches et du contrôle tout en respectant les
contraintes de temps.

2.1.2 Sous-couche LLC (Logical Link Control)
La fragmentation des messages, correspondant à la
couche transport du modèle OSI (Open System Interconnection), n'est pas
gérée dans cette norme.
L'application temps réel spécifie à la
couche LLC les contraintes temporelles des messages envoyés tels que la
période, le temps d'arrivée, l'échéance...
Pour un service de garantie, tous les messages
préparés (mis dans une file de transmission) sont transmis avec
respect de leurs échéances. Par contre, pour un service de
Meilleur effort, les messages en attente de transmission seront mis dans un
ordre tel que le taux de perte de messages (le nombre de messages dont les
échéances ne sont pas respectées) soit minimal.
L'une des fonctions de la couche LLC est de transformer les
messages provenant de la couche application sous une forme appropriée
à la couche MAC. C'est le mécanisme de fragmentation qui consiste
à découper chaque message en petits paquets. La couche LLC
propage les contraintes temporelles de chaque message à ses paquets.
L'échéance d'un message peut être copiée à
chacun de ses paquets ou encore associée au dernier paquet tout en la
réduisant pour les autres paquets de manière à ce que le
premier paquet ait l'échéance la plus petite. Une fois
fragmentés, les messages sont mis dans une file de transmission selon
une politique d'ordonnancement.
- Gestion des erreurs
C'est un mécanisme responsable de la détection et
de la correction d'erreurs lors de la transmission de paquets. Le
mécanisme classique ARQ ( Automatic Repeat Request), qui consiste
à renvoyer à l'émetteur un acquittement positif si un
paquet est bien reçu et négatif dans le cas contraire, ne
s'applique pas dans notre cas car le mécanisme ne tient pas compte de la
composante temps réel.
Une solution avec acquittement serait d'associer un nombre
maximal de retransmissions de paquets en fonction de son
échéance. Si un acquittement positif est reçu, la copie du
paquet est supprimée localement. Une autre solution sans acquittement
serait d'envoyer à la fois le maximum de copies de paquets sans se
préoccuper des erreurs, le receveur s'arrangera pour garder la copie
sans erreur et supprimer les autres. Il est clair qu'aucune solution n'est
complètement fiable et présente toujours un taux d'erreurs.
- Contrôle de flux
C'est une technique de synchronisation qui garantit au
récepteur de ne pas être débordé par les messages de
l'émetteur. Pour un service de garantie, il faut s'assurer qu'il existe
suffisamment d'espace dans le buffer récepteur avant d'accepter un
message. Par contre, pour un service de Meilleur effort, si le buffer
récepteur est plein, le message reçu est perdu.
Nous allons maintenant présenter plus
particulièrement les spécificités de la couche liaison de
données du bus CAN.
-Principe de l'échange de données
Lors de la transmission des données sur un bus CAN, aucune
station n'est adressée, mais le contenu d'un message est
identifié par un identificateur univoque sur l'étendue du
réseau. Outre identifier le contenu du message, l'identificateur
détermine également sa priorité, ce qui est
déterminant pour l'assignation d'un bus lorsque plusieurs messages sont
en concurrence pour le droit d'accès au bus. Si l'unité centrale
d'une des stations souhaite envoyer un message à une ou plusieurs
stations, elle transfère les données à transmettre et leur
identificateur au module CAN qui lui est affectée. Ce dernier se charge
de la constitution et la transmission du message.
Dès qu'il reçoit l'assignation du bus («
émission du message ») toutes les autres stations du réseau
se mettent à l'écoute (« réception du message
»). Chaque station du réseau CAN est en mesure d'ignorer ou de
prendre en compte le message qui est sur le bus (« Sélection
»). Ce type d'adressage permet d'avoir une grande flexibilité au
niveau de la configuration (figure 3). Contrairement à d'autres
réseaux aucune adresse cible physique n'est prescrite du
côté du protocole de transmission de données. Ainsi les
valeurs de certains capteurs sont réparties sur toutes les stations du
réseau évitant que chaque organe de commande n'ait son propre
capteur (« diffusion générale multidestinataire »).
l Arbitrage bit à bit non destructif
Pour le traitement temps réel des données, le
débit binaire physique (ici 1 Mbit/s maximum) n'est pas le seul
critère, il faut aussi que l'assignation du bus soit efficace. Comme les
informations traitées n'ont pas le même niveau de priorité,
un identificateur de chaque trame a été défini pour
déterminer dans quelle mesure le message doit être transmis par
rapport à un autre moins urgent. Ainsi le conflit d'accès au bus
est résolu au moyen d'un arbitrage bit à bit par
l'intermédiaire d'identificateurs respectifs.

- Efficacité de l'attribution du bus
Les procédés d'assignation de bus utilisés
sont nombreux, on distingue
Les suivants.
Assignation à tranches de temps fixe : l'assignation
s'effectue de manière séquentielle au niveau de chaque poste pour
une fourchette de temps maximale, sans se préoccuper du fait que la
station a besoin du bus à ce moment-là (exemple : Token Slot).
Assignation en fonction des besoins : l'assignation est fonction
de la volonté de transmettre, seules les stations souhaitant
émettre sont prises en compte, c'est le procédé
utilisé par le bus CAN.
Accès non destructif au bus : en effet chaque accès
au bus par une ou plusieurs stations conduit toujours à l'attribution
univoque d'un bus, alors que l'accès destructif impose que à tout
accès simultané par plusieurs stations, il faut interrompre les
tentatives d'émission.
Le rattachement de la priorité d'accès au contenu
du message permet en cas de surcharge du bus, d'éviter la saturation de
l'ensemble de la transmission comme c'est le cas du CSMA/CD (Carrier Sense
Multiple Access/Collision Avidance). Le bus CAN est doté d'un
contrôle décentralisé de l'accès au bus,
c'est-à-dire que tous les mécanismes essentiels à la
communication, y compris le contrôle de l'accès au bus, sont
repris en plusieurs points du réseau. Ceci permet d'empêcher de
ramener ces mécanismes vers une seule unité qui, une fois en
panne, serait très difficile à substituer. Une station redondante
mettra beaucoup de temps à prendre en charge la gestion du bus (ce qui
peut empêcher tout fonctionnement en temps réel).
2.1.3 Sous-couche MAC (Medium Access Control)
Cette couche gère l'accès au canal physique
à l'aide d'un protocole de communication, autrement dit elle
récupère les unités de données de la couche LLC et
les renvoie dans le canal physique en ajoutant l'information de contrôle
selon le protocole implanté.
Les protocoles qui nous intéressent sont ceux qui ont pour
objectif le respect des échéances des messages. Il existe une
multitude de protocoles temps réel selon qu'ils garantissent le respect
des échéances des messages ou pas.
2.1.4 Couche physique
Cette couche correspond à l'aspect matériel
(connecteur) et électrique des signaux (codage, tensions...).
2.2 Concepts de base du bus CAN
Lors de la définition de la couche physique, on
s'intéresse au débit, à la distance et au type du support
physique. La relation vitesse/distance proposée par la norme CAN
dépend :
-- des retards introduits à la sortie de l'émetteur
et à l'entrée du récepteur ;
-- de la vitesse de propagation du support de la ligne ;
-- du débit binaire nominal souhaité.
A titre indicatif, le tableau 2 donnent les distances maximales
entre deux noeuds pour des débits standards.
La relation entre le débit et la distance maximale sur une
paire de fils en cuivre est la suivante : débit x distance maximale = 1
Mbit/s x 40 m.
En résumé, l'implémentation du protocole CAN
dans le modèle
OSI est illustrée dans le tableau 3.


3. Aspect matériel du bus CAN
3.1 Généralités
Le CAN est un système très ouvert en ce sens que
plusieurs produits issus de différents fabricants peuvent cohabiter sur
le même réseau. Les composants CAN peuvent être
classés en plusieurs catégories :
-- contrôleur CAN « Stand Alone » : composant
assurant la gestion du protocole CAN destiné à s'interfacer avec
un système programmable de type microcontrôleur ;
-- microcontrôleur « Single Chip Solution » : il
s'agit d'un microcontrôleur intégrant (fondu) avec un
contrôleur CAN ;
-- SLIO (Serial Link Input/Output) : composant autonome
intégrant un contrôleur CAN, prévu pour des
entrées/sorties déportées, et conçu pour
réaliser des fonctions de contrôle à distance de capteurs
et d'actionneurs ;
__« Gate array » ou prédiffusé : il
s'agit de circuits intégrés sur mesure incorporant un
contrôleur CAN.
Actuellement de nombreux circuits intégrés
supportant le protocole
CAN sont disponibles sur le marché.
La figure 8 représente le schéma synoptique de
certains microcontrôleurs qui prennent en charge la transmission d'un
signal ou sa réception grâce au module « Transceivers »
et gèrent tout le protocole CAN à l'aide du contrôleur
intégré « Protocol handler ». Ce dernier communique
avec le microcontrôleur qui se charge de la couche applicative. Pour
assurer un environnement Temps réel aux applications évoluant sur
ce type de microcontrôleurs, un transfert DMA (Direct Memory Access) y
est implanté.
Le gestionnaire du protocole (Protocol handler) est l'exemple
type du circuit d'interfaçage entre un microcontrôleur avec le bus
CAN (hormis le driver de ligne). Sa fonction consiste à gérer les
couches dites de « Communication » et « Physique » du
protocole du bus CAN en tant que « Stand Alone Controller ». Dans ce
cas de figure, le microcontrôleur externe a pour mission d'assurer la
couche « applicative » de l'ensemble. Pour se connecter aux
différents médias de transmission (dans la couche physique), les
interfaces de lignes « Transceivers » sont nécessaires
pour s'adapter aux paramètres physiques, ainsi qu'aux besoins de
fiabilité.

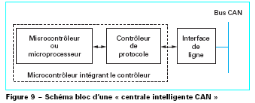
3.2 Choix d'une architecture
Pour communiquer via le bus CAN, il est nécessaire de
faire appel à un composant, circuit électronique programmable,
dédié au bus CAN. Ces composants se nomment «
Contrôleur CAN », ils assurent une gestion du protocole CAN.
La philosophie du bus CAN impose que chaque noeud soit autonome,
aussi trouve-t-on deux architectures liées à deux familles de
circuits : les contrôleurs indépendants et les
microcontrôleurs intégrant le contrôleur de bus CAN. La
première famille nécessite une unité de traitement de type
microcontrôleur ou microprocesseur pour programmer et dialoguer avec le
contrôleur, voir la représentation des deux architectures en
figure 9.
L'intérêt du bus étant de véhiculer
des signaux sur une certaine longueur, un circuit capable de « doper
» les signaux est généralement nécessaire (driver de
ligne).
On obtient donc une architecture à deux ou trois modules
qui peut se décomposer en un microcontrôleur ou microprocesseur,
un contrôleur de protocole, un driver de ligne.
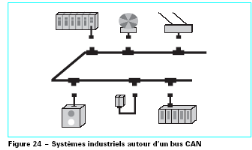
4.3 Systèmes intégrés
Plusieurs sociétés (Allen-Bradley, Honeywell) ont
proposé des systèmes complets pour le contrôle/commande
associés au bus CAN (DeviceNet, SDS).
La figure 24 représente un système mettant en
communication divers éléments industriels [API (automate
programmable industriel), robots, capteurs et actionneurs « intelligents
»...].
Le SDS (Smart Distributed System) est un système de
supervision temps réel multitâches proposé par Honeywell
pour le contrôle et la commande d'une large gamme de dispositifs à
travers un réseau de terrain de type bus CAN.
4. Applications du CAN
4.1 Généralités
Le CAN a trouvé de très nombreuses applications
dans des domaines divers et variés : systèmes de navigation,
ascenseurs, machines-outils, photocopieurs, textiles, jouets. Le CAN a
été intégré directement dans les capteurs tels que
les codeurs optiques.
CAN dans les véhicules
Pour les voitures de tourisme, il existe
généralement deux réseaux CAN :
-- l'un concerne l'injection électronique, l'allumage
électronique, la boîte de vitesse automatique et les
systèmes ABS (Anti-Blocking System) ;
-- l'autre est utilisé pour le chauffage, la
climatisation, les vitres et les rétroviseurs électriques, les
sièges ajustables, la fermeture centralisée des portes,
l'optique...
Ces applications sont actuellement en cours sur les autobus, les
camions et même sur les fauteuils roulants, la sécurité
étant l'aspect principal.
Le bus CAN a été très rapidement
intégré dans les tracteurs, les véhicules utilitaires et
de chantiers. La norme ISO11783 a pour objet de définir les
caractéristiques spécifiques du secteur du machinisme agricole
mobile dans le cadre de la transmission par bus CAN d'informations entre le
tracteur et diverses machines telles qu'une charrue, une ramasseuse-presse, un
pulvérisateur...
Des applications du CAN ont été
réalisées sur les trains et les métros où la
communication entre wagons est très importante, ainsi que sur des robots
mobiles.
CAN dans les techniques médicales
-- Scanners : par exemple système PMS (Philips Medical
Systems) utilisant le CAN pour la communication entre l'unité de
positionnement du patient et l'unité de production des rayons X.
-- Fauteuils de dentiste.
-- IRM.
CAN et la domotique
-- Escalator, tapis roulants pour piétons.
-- Rideaux et scènes dans un théâtre.
CAN dans le contrôle-commande de procédés
-- DeviceNet.
-- SDS (Smart Distributed Systems).
4.2 Exemples pratiques
4.2.1 Robots mobiles
La robotique mobile nécessite l'intégration et la
gestion de nombreuses fonctions de localisation, perception, commande...
La figure 25 présente une architecture appropriée
basée sur une carte CAN196KC. Cette carte peut fonctionner en mode
autonome ou contrôlée par PC. En mode autonome, la carte est
régie par un programme qui réside dans une EPROM. En mode
contrôlée par PC, un programme utilisateur peut être
téléchargé, via la liaison RS232, sur la carte CAN196KC et
être exécuté. Ces propriétés en font un outil
performant pour expérimenter et développer des noeuds CAN «
intelligents ».
La carte CAN196KC est dotée d'une CPU 16 bit,
équipée d'une interface de bus CAN. Elle peut être
utilisée comme système de développement ou être
intégrée dans une application spécifique.
Basée sur le microcontrôleur 80C196KC et un
contrôleur de communication
CAN 82527 de la famille Intel et possédant une horloge
temps réel, cette carte permet de tester des applications temps
réel connectées au bus CAN.

4.2.2 Régulation de température
La figure 27 illustre une application du bus CAN en
régulation de température. La mesure de la température se
fait à l'aide d'une sonde PT100 et son acquisition, à une
fréquence de 1 Hz, ainsi que sa transmission, à 100 kbit/s via le
CAN, sont assurées à l'aide d'un simple composant SLIO
associé à un convertisseur analogique numérique.
L'information ainsi véhiculée sur le CAN est lue
par la carte CAN196KC. Un algorithme de commande implantée dans cette
carte permet d'actionner une servovalve de façon à assurer la
consigne en température désirée.

| 

