Contribution à l'optimisation d'un comportement collectif pour un groupe de robots autonomespar Amine BENDAHMANE Université des Sciences et de la Technologie d'Oran Mohamed Boudiaf - Doctorat en informatique - Intelligence Artificielle 2023 |

CHAPITRE 4
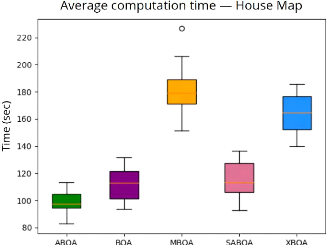
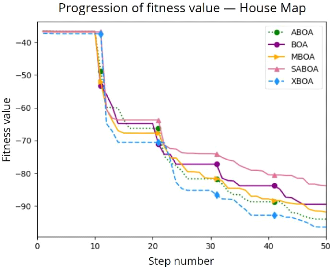
*Les résultats présentent les valeurs moyennes de 10 exécutions FIGURE 4.15 - Suite de la comparaison des variantes de l'algorithme BOA en utilisant la stratégie à court terme et une population de taille 5 129 Un autre facteur a prendre en considération aussi est la stabilité des résultats. En effet, après avoir répété l'expérience 10 fois, le xBOA a enregistré un taux de stabilité élevé avec un résultat presque similaire à chaque exécution (~1 à 2% d'écart). Alors que l'algorithme ABOA vacillait dans une marge de 15% de différence entre les résultats.
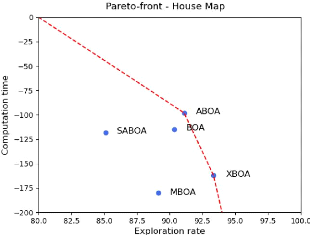
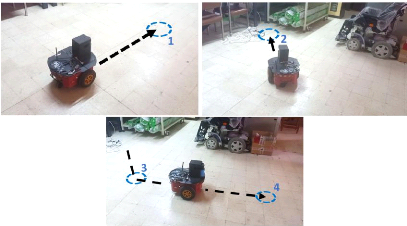
*Toutes les solutions sous la ligne rouge sont dominées FIGURE 4.16 - Visualisation du front des solutions dominante (Pareto-front) pour les variantes de BOA en utilisant une population de taille 5 4.9 Expérience 7 : Test en utilisant un robot réel Afin de valider l'adaptabilité de notre approche aux expériences du monde réel, nous avons effectué des tests sur le robot P3DX du laboratoire LARESI situé dans le département d'électronique de USTOMB. Pour cela, nous avons séparé le système en deux parties. D'un côté, un ordinateur portable connecté au réseau local du laboratoire via une connexion wifi joue le rôle de serveur. Il exécute le processus d'optimisation pour générer le prochain point de destination à visiter ainsi que l'algorithme de planification de chemin pour calculer les positions intermédiaires, qui sont ensuite transformées en un ensemble de commandes de mouvements puis envoyées au robot via une socket TCP. Une fois que le robot reçoit une commande de mouvement (move, turn, stop), il la transforme en une commande de vitesse pour le contrôle des moteurs en utilisant les routines du système ROS (Robot Operating System), celui-ci communiquera directement avec le mi-crocontrôleur du robot via l'interface ROSARIA pour exécuter les commandes. En parallèle à cela, un autre programme basé sur ROS s'occupe de collecter les informations mesurées par le Lidar à une fréquence de 10Hz puis les envoyer au serveur pour mettre à jour la carte de l'environnement. CHAPITRE 4Un problème rencontré durant les expériences était l'accumulation de l'erreur de localisation causée par le glissement du robot sur le sol. En effet, notre simulateur supposait que la localisation du robot était connue à chaque instant t, toutefois, dans le monde réel ceci ne pouvait se faire sans l'intégration d'un dispositif électronique de positionnement. La méthode que nous avons utilisée sur le robot P3DX se base sur l'odométrie, qui est une technique peu chère se basant sur le calcul du nombre de rotations des roues pour estimer la distance parcourue par le robot et son angle. Cependant, nous avons remarqué des mini-glissements du robot à la fin de chaque mouvement qui le fait dévier de 1 ou 2 centimètres de sa trajectoire. Bien que cette déviation n'est pas importante, son accumulation après plusieurs mouvements s'accroit et engendre une localisation erronée. Afin de résoudre ce problème sans avoir besoin d'utiliser des dispositifs de localisation plus complexes, nous avons intégré un mécanisme de contrôle en boucle fermée (contrôl-leur PID) pour réduire la vitesse de rotation des roues lorsque le robot se rapproche de l'emplacement prévu, avec une possibilité de revenir légèrement en arrière pour corriger sa position si nécessaire. Les codes sources de ce contrôleur PID basé sur le système ROS ainsi que le programme pour le contrôle du robot en utilisant les commandes distantes par TCP sont disponible en open source sur le lien cité en bas de page 1. La figure 4.17 montre des photos prises durant les expériences dans le laboratoire. Dans les travaux futurs, nous allons optimiser le système en intégrant directement les calculs des points de destination et de la planification de trajectoires dans l'ordinateur de bord du robot, et ceci afin qu'il puisse être autonome et continuer sa mission même si la connexion avec le serveur est interrompue. Étant donné les faibles capacités de calcul de cet ordinateur de bord, il serait judicieux de profiter des résultats obtenus durant l'expérience 1. https :// github.com/amineHorseman/pioneer_bci
FIGURE 4.17 - Expérience sur le robot réel 130 131 précédente par rapport à la réduction de la taille de population afin d'alléger les calculs. L'utilisation du xBOA dans ce contexte serait donc appropriée étant donné ses capacités de diversification des solutions dans les populations à petite taille, ainsi que sa stabilité à atteindre un taux d'exploration élevé lors de chaque exécution. 4.10 Conclusion Nous avons présenté dans ce chapitre une série d'expériences effectuées dans le but d'évaluer les performances de l'algorithme xBOA. Nous l'avons comparé à plusieurs autres métaheuristiques, ainsi que les autres variantes de BOA récemment introduites dans la littérature. L'évaluation des méthodes s'est basée sur 5 critères de comparaison. Les résultats montrèrent que l'algorithme xBOA surpasse BOA et ses autres variantes, mais requiert un temps de calcul élevé. L'algorithme proposé surpasse aussi les autres métaheuristiques telles que PSO, GA, GWO et ABC dans certains scénarios. Nous avons aussi effectué une expérience pour évaluer l'adaptabilité de notre approche dans un contexte multirobots. Les résultats nous ont permis de valider notre modélisation du mécanisme de synchronisation implicite et observer l'émergence d'un comportement collectif au sein des robots leur permettant de se disperser dans l'environnement et minimiser la redondance même pour des zones à large échelle. Nous avons également effectué une expérience sur un robot réel de type P3DX au sein du laboratoire LARESI basé sur le middleware ROS et une communication avec le serveur via une connexion wifi en utilisant des sockets TCP. Les résultats obtenus durant ces expériences ont été satisfaisants sur certains critères, mais ont démontré aussi les limites de l'algorithme xBOA. Nous présenterons dans la conclusion générale quelques perspectives d'amélioration de cette méthode. 132 |
|