I.6. Architecture des systèmes embarqués
:
Dans cette section, nous présentons les architectures
supportées par trois générations d'outils de
conception.
I.6.1. Les systèmes embarqués de
première génération :
I.6.1.1. Partie matérielle des systèmes
embarqués de première génération :
Les premiers systèmes embarqués supportés
par des outils tels que COSYMA et Vulcan étaient très simples :
ils étaient constitués d'un processeur qui contrôlait un
nombre restreint de CIAS (circuits intégrés à applications
spécifiques) ou ASIC qui étaient appelés
périphériques. Cette architecture est représentée
figure I.2. Les communications de cette architecture se situent au niveau du
bus du processeur et sont type maître/esclave : le processeur est le
maître et les périphériques sont les esclaves.

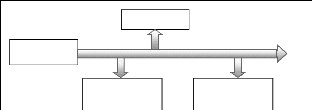
Système embarqué
Processeur
Périphérique
d'entrée
Mémoire
Bus du processeur
Périphérique
de sortie
Environnement
Figure I.2 : Architecture embarquée de
première génération

Les périphériques de ces architectures
étaient essentiellement des capteurs et des actionneurs
(contrôleurs magnétiques, sortie, etc.). Le processeur est
dédié au calcul et au contrôle de l'ensemble du
système.
Les microcontrôleurs assemblent sur une même puce le
processeur et les périphériques.
I.6.1.2. Partie logicielle des systèmes
embarqués de première génération :
Ne devant pas exécuter de nombreuses opérations
simultanées (le nombre de périphériques et de fonctions
étant restreint), les parties logicielles étaient
constituées d'un seul programme. La réaction aux
événements était effectuée par le biais de routines
de traitement d'interruptions.
Cette partie logicielle était décrite directement
en langage d'assemblage ce qui permettait d'obtenir un code efficace et de
petite taille.
| 

