II.6.2.8.1. La génération d'enveloppes de
simulation :
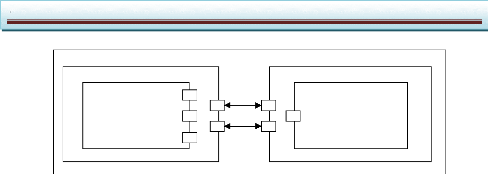
Le flot permet d'effectuer des simulations du système
à tout niveau d'abstraction, et même en mélangeant les
niveaux d'abstraction. La technique de base consiste à encapsuler les
divers composants à simuler dans des enveloppes qui adaptent le niveau
de leurs communications à celui de la simulation globale. La figure
II.12 illustre l'utilisation de ces enveloppes : à l'intérieur de
chacune se trouve un composant qui est simulé à un niveau
d'abstraction qui peut être inférieur (module A) égal ou
supérieur (module B) au niveau d'abstraction de la simulation. Ces
enveloppes permettent aussi d'adapter les divers simulateurs entre eux, comme
par exemple un simulateur VHDL (module B) et un simulateur systemC.
Chapitre II conception des logiciels embarqués
Simulation SystemC
Enveloppe A
Module A
VHDL
Niveau : micro-architecture
Enveloppe B
Module B systemC Niveau : fonctionnel
Figure II.12. Enveloppes de
simulation
Un outil qui permet de générer ces enveloppes
est basé sur le même principe que la génération
d'interface : la bibliothèque contient les trois types de composants
précédemment cités, mais le bus interne devient une API
(application programming interface) de simulation.
II.6.2.8.2. La cosimulation :
Grâce aux enveloppes, il est possible d'effectuer des
validations par cosimulation pour toutes les étapes du flot, ou
même sur des composants situés à des étapes
différentes. Plus le niveau d'abstraction est élevé, plus
la simulation est rapide, et plus le niveau est bas, plus la simulation est
précise. Cette cosimulation est multiniveau, mais elle peut être
aussi multilangage. La raison de telles cosimulations est que très
souvent un langage est adapté pour la simulation de certaines parties
d'un système, mais inadapté pour d'autres. Par exemple les
simulateurs VHDL sont bons pour les circuits mais pas pour la mécanique
qui est mieux modélisée par Matlab.
Pour effectuer une cosimulation, chaque simulateur est
exécuté dans un processus différent. Un processus de
contrôle gère l'ensemble des communications et synchronisations
entre les simulateurs par le biais de mémoires partagées. Le
modèle temporel utilisé est le modèle synchrone : chaque
simulateur exécute un pas de calcul, puis toutes les données sont
échangées grâce au processus de routage. Une fois que les
communications sont achevées, un autre pas de calcul peut être
effectué.
Le processus de contrôle est décrit en systemC.
Cela permet de l'utiliser pour décrire des parties matérielles ou
logicielles au niveau macroarchitecture, sans avoir à utiliser un
simulateur externe. Il est généré en même temps que
les enveloppes à partir de la bibliothèque de simulation.
II.6.2.9. Utilisation des résultats de
simulation :
Les simulations pourront servir de base pour mettre en place
une méthodologie d'évaluation qui permettra dans un premier temps
de guider les choix du concepteur dans l'étape de synthèse, puis
d'automatiser cette synthèse avec recherche d'optimum. Pour ce faire, il
faudra définir des modèles de performance et des heuristiques
permettant de les composer en même temps que l'on compose les divers
modules des systèmes à générer.
| 

