MÉMOIRE
Présenté à
L'UNIVERSITÉ SAAD DAHLEB
DÉPARTEMENT D'AÉRONAUTIQUE
DE BLIDA
par MOURAD BOUDJERIS
Pour obtenir le grade
d'INGÉNIEUR d'ÉTAT
en AÉRONAUTIQUE
Spécialité : PROPULSION
THÈME
CALCUL DES PERFORMANCES
AÉRODYNAMIQUES DE LA
CONFIGURATION AILE-FUSELAGE ARA
M100 PAR MAILLAGE HYBRIDE
Rapporteur :
M. ALI.T AHI
Soutenu en Septembre 2011
RÉSUMÉ
Le succès des méthodes de
résolution numériques, les progrès dans la Conception
Assistée par Ordinateur (C.A.O), et le développement des outils
de visualisation font que les méthodes de génération de
maillage ont connu de nombreux progrès au cours des dernières
années pour devenir aujourd'hui un sujet d'étude à part
entière. Notre projet porte sur la génération de maillages
hybride par ANSYS 13 sur la configuration AileFuselage d'ARA M100 et les
solutions correspondantes, ainsi la validation avec
l'expérimentale.
ABSTRACT
The success of the numerical methods of resolution,
progress in the Computer-aided design (D.A.O), and the development of the tools
for visualization make that the methods of generation of mesh knew many
progress during the last years to become today a subject of study to whole
share. Our project thus carries on the hybrid mesh generation by ANSYS 13 on
the configuration ARA M100 Wing-Body and the solutions corresponding, thus the
validation with the experimental.
REMERCIEMENTS
Avant tout je remercie ALLAH qui m'a donné la
volonté, la foi et le courage pour mener à bien ce
travail.
Un remerciement particulier et spécial à mes
chers parents qui m'ont aidé et conseillé, sans eux je ne serais
jamais arrivée à ce stade.
Le travail présenté dans ce mémoire a
été effectué au sein de l'institut d'Aéronautique
de Blida sous la direction de monsieur A. TAHI, à qui je présente
mes sincères remerciements pour avoir accepté de diriger ce
travail.
J'exprime mes remerciements aux membres du jury de nous avoir
honoré en acceptant de juger notre travail,
Enfin à tout mes camarades qui m'ont aidé
beaucoup durant la réalisation de cette mémoire surtout Mr :
Mohammed Taifour Abdelouahab, Belbaki Abderrahman, et à tous ceux qui
ont contribués de prés ou de loin.
NOMENCLATURE
a Vitesse du son [m/s]
A Surface [m2]
Cd Coefficient de trainée
Cl Coefficient de portance
Cm Coefficient du moment
Cp Coefficient de
pression
ñ Masse volumique de en [kg/m3]
F Forces extérieures [N/kg]
R Constante du gaz [J/kg K]
í La viscosité cinématique en
[m2/s]
L La corde en [m]
T La température [°K]
t Temps [s]
g Gravité [m/s2]
U Vitesse du fluide [m/s]
L Longueur caractéristique [m]
P Pression [Pa]
Pt Pression totale [Pa]
Ps Pression de statique [Pa]
ã Forces d'inertie
Re Nombre de Reynolds
á Angle d'incidence [°]
ë Allongement
ä Dièdre d'une voilure
M Nombre de mach
ä* Epaisseur de déplacement de la couche
limite [mm]
è Epaisseur de quantité de mouvement
[mm]
H Facteur de forme
ã Rapport des chaleurs spécifiques
(Cp/Cv)
Y+ Distance adimensionnée de la première
maille à la paroi M8 Nombre de Mach à l'infini Nombre de Mach
à l'infini
u Composante horizontale de la vitesse [m/s]
v Composante verticale de la vitesse [m/s]
ô ù Cisaillement pariétal
h Hauteur initiale (initial height) [mm]
r Facteur de progression (height ratio)
n Nombre des couches (layer number)
ABRÉVIATIONS
AGARD Advisory Group for Aerospace Research and
Development
DNS Direct Numerical Simulation
LES Large Eddy Simulation
SST Shear Stress Tensor
RSM Reynolds Stress Model
CFD Computational Fluid Dynamics
B-REP Boundary Représentation
CAO Conception Assisté par Ordinateur
CSG Constructive Solid Geometry
RNG Reynolds Normalisation Group
LISTE DES FIGURES
Figure (I.1) : Plaque plane mise à
l'écoulement. [3] 7
Figure (I.2) : Fumée d'une cigarette.
9
Figure (I.3) : Forme de la couche limite sur une plaque
plane 9
Figure (I.4) : Epaisseur de la Couche Limite
9
Figure (I.5) : Décollement de la Couche Limite
11
Figure (I.6) : Ecoulement avec gradient longitudinal de pression positif
(D est le point de
décollement de la couche limite). 11
Figure (I.7) : Conceptions simples du décollement.
12
Figure (I.8) : Division de la région proche paroi
18
Figure (I.9) : Modélisation de la couche limite.
19
Figure (II.1) : Méthodologie de résolution
d'un problème numérique 23
Figure (II.2) : Exemples de mailles utilisées en
Volumes Finis. 24
Figure (II.3) : Composant d'un maillage. 25
Figure (II.4). Exemple de maillage structuré et
non structuré autours d'un profil. [14] 26
Figure (II.5) : La distorsion. 27
Figure (II.6) : Déviation angulaire.
28
Figure (II.7) : Maillage couche limite. 29
Figure (II.8) : Indépendance de la solution du
maillage. 30
Figure (II.9) : Interface d'ICEM CFD 32
Figure (II.10) : Interface FLUENT 13. 33
Figure (II.11): Exemple de Marcum (1995) faisant passer
le nombre de triangle de 11544 au niveau de la couche limite (maillage
non-structuré pur, figure à gauche) à
5772 quadrilatères (maillage hybride, figure
à droite). 34
Figure (II.12) : Croissances des prismes. 36
Figure (II.13) : Hauteur des prismes. 36
Figure (III.1) : Dimensions d'ARA M100 39
Figure (III.2) : Importation de la
géométrie et nettoyage de la CAO 40
Figure (III.3) : Création des familles
41
Figure (III.4) : Création d'un point
matériel 42
Figure (III.5) : Affichage de maillage (Tecplot)
43
Figure (III.6) : Paramètres de la hauteur des
prismes 44
Figure (III.7) : Génération de maillage
prismatique (Tecplot) 46
Figure (III.8) : Importation du maillage 48
Figure (III.9) : Vérification du maillage sou
Fluent 48
Figure (III.10) : Lissage du maillage 49
Figure (III.11) : Vérification des unités
49
Figure (III.12) : Choix du modèle de turbulence
50
Figure (III.13) : Définition des
caractéristiques du fluide 52
Figure (III.14) : Choix de la pression de
référence 52
Figure (III.15) : Pressure-far-field pour tout le domaine
53
Figure (III.16) : Wall 54
Figure (III.17) : Symétrie 54
Figure (III.18) : Choix et affichage pendant les calculs
des critères de convergence (residuals) 55
Figure (III.19) : Choix et
affichage pendant les calculs des critères de convergence
(Drag & Lift) 55
Figure (III.20) : Initialisation des calculs
56
Figure (III.22) : Lancement de la simulation
57
Figure (III.21) : Création d'animation
58
Figure (IV.1) : Historique des résidus
60
Figure (IV.2) : Historique des Coefficient de
trainée (ORIGIN) 60
Figure (IV.3) : Historique des Coefficient de Portance
(ORIGIN 61
Figure (IV.4) : Historique des Coefficient de Moment
(ORIGIN) 61
Figure (IV.5) : Répartition de la pression
statique sur ARA M100 extrados (Tecplot) 62
Figure (IV.6) : Répartition de la pression
statique sur M100 intrados (Tecplot) 62
Figure (IV.7) : Répartition du nombre de mach sur
ARA M100 extrados (Tecplot) 63
Figure (IV.8) : Répartition du nombre de mach sur
ARA M100 intrados (Tecplot) 63
Figure (IV.9) : Historique des résidus
64
Figure (IV.10) : Historique des Coefficient de
trainée (ORIGIN) 64
Figure (IV.11) : Historique des Coefficient de Portance
(ORIGIN) 65
Figure (IV.12) : Historique des Coefficient de Moment
(ORIGIN) 65
Figure (IV.13) : Maillage de l'avion ARA M100 (Tecplot)
66
Figure (IV.14) : Variation d'Y+ plus sur
chaque station de l'aile (GRFWIN) 66
Figure (IV.15) : Répartition de la pression
statique sur ARA M100 extrados (Tecplot) 67
Figure (IV.16) : Répartition de la pression
statique sur ARA M100 intrados(Tecplot) 67
Figure (IV.17) : Contours de pression sur le profil
d'aile 68
Figure (IV.18) : Contours de Mach sur l'avion
68
Figure (IV.19) : Contours de Mach sur le profil d'aile
69
Figure (IV.20) : Vecteurs vitesse sur l'avion au plan de
symétrie 70
Figure (IV.21) : Vecteurs vitesse sur le profil d'aile
71
Figure (IV.22) : Stations de mesure de Cp sur l'aile
d'ARA M100 (Tecplot) 73
Figure (IV.23) : Distribution du coefficient de pression
calculé et expérimental sur l'intrados et l'extrados pour la
station 0.019 (GRAFWIN) 73
Figure (IV.24) : Distribution du coefficient de
pression calculé et expérimental sur
l'intrados et l'extrados pour la station 0.325 (GRAFWIN)
74
Figure (IV.25) : Distribution du coefficient de pression calculé
et expérimental sur
l'intrados et l'extrados pour la station 0.635 (GRAFWIN)
74
Figure (IV.26) : Distribution du coefficient de pression calculé
et expérimental sur
l'intrados et l'extrados pour la station 0.936 (GRAFWIN)
75
Figure (IV.27) : Contours de pression pour
á=-3.0170 (Tecplot) 76
Figure (IV.28) : Contours de pression pour
á=-2.8730 (Tecplot) 76
Figure (IV.29) : Contours de pression pour
á=00 (Tecplot) 76
Figure (IV.30) : Contours de pression pour
á=3.0170 (Tecplot) 77
Figure (IV.31) : Contours de pression sur le profil
à á=3.0170, -2.8730, 00 et
3.0170
(Tecplot) 77
Figure (IV.32) : Contours de Mach pour
á=-3.0170 (Tecplot) 78
Figure (IV.33) : Contours de Mach pour á =
-2.8730 (Tecplot) 78
Figure (IV.34) : Contours de Mach pour
á=00 (Tecplot) 78
Figure (IV.35) : Contours de Mach pour
á=3.0170 (Tecplot) 79
Figure (IV.36) : Contours de Mach sur le profil à
á=3.0170, -2.8730, 00 et 3.0170
(Tecplot)
79
Figure (IV.37) : distribution de Cp dans la station 0.019
(GRAFWIN) 80
Figure (IV.38) : distribution de Cp dans la station 0.325
(GRAFWIN) 80
Figure (IV.39) : distribution de Cp dans la station 0.635
(GRAFWIN) 81
Figure (IV.40) : distribution de Cp dans la station 0.936
(GRAFWIN) 81
Figure (IV.41) : Variation de Cl en fonction de Alpha
(ORIGIN) 83
Figure (IV.42) : Variation de Cd en fonction de Alpha
(ORIGIN) 83
Figure (IV.43) : Variation de Cl en fonction de Cd
(ORIGIN) 84
LISTE DES TABLEAUX
Tableau (II.1) : La variation de la qualité de
maillage 28
Tableau (III.1) : Paramètres de maillage
tétraédrique 42
Tableau (III.2) : Valeurs des hauteurs 44
Tableau (III.3) : Paramètres de maillage
prismatique 45
Tableau (III.4) : Modèles de turbulence [20]
51
Tableau (IV.1) : Définition des conditions aux
limites 59
Tableau (IV.2) : Forces de pression 82
Tableau (IV.3) : Forces de viscosité
82
Tableau (IV.4) : Valeurs de Cl et Cd pour chaque á
82
TABLE DES MATIÈRES
INTRODUCTION 1
CHAPITRE I : PAPPEL DE LA DYNAMIQUE DES FLUIDES
I.1. Introduction 3
I.2. Les équations fondamentales de la dynamique
des fluides 3
I.2.1. Principe de conservation de la masse
3
I.2.2. Principe de conservation de la quantité de
mouvement 4
I.2.3. Les équations de Navier-Stokes
5
I.3. Les différents types d'écoulements
6
I.3.1. Ecoulements incompressibles et compressibles
6
I.3.2. Ecoulement laminaire et écoulements
turbulent 7
I.3.3. Ecoulement stationnaire et instationnaire
7
I.3.4. Ecoulement irrotationnel 8
I.4. Couche Limite 8
I.4.1. Epaisseur de la Couche Limite 9
I.4.1.1. Epaisseur de déplacement ä*
9
I.4.1.2. Epaisseur de quantité de mouvement
è 10
I.4.1.3. Facteur de forme H 10
I.4.2. Décollement de la Couche Limite
10
I.4.3. Couche limite turbulente 12
I.5. Turbulence 13
I.5.1. Modélisation de la turbulence
14
I.5.2. Nombre de Reynolds 14
I.5.3. Nombre de Mach" M " 15
I.5.4. Les modèles de turbulence 15
I.5.4.1. Le modèle Spalart-Allmaras
15
I.5.4.2. Le modèle k-å 16
I.5.4.3. Le modèle k-ù standard et le
modèle k- ù -SST 16
I.5.4.4. Modèle à contrainte de Reynolds
RSM (Reynolds Stress Model) 16
I.5.4.5. Large Eddy Simulation (LES) 17
I.5.4.6. Simulation directe (DNS) ou Direct Numerical
Simulation 17
I.5.5. Calcul en proche paroi 17
I.5.5.1. Modélisation de l'écoulement en
proche paroi 18
I.6. Les conditions aux limites 19
I.6.1. Condition de pression à l'entrée
19
I.6.2. Condition de vitesse à l'entrée
20
I.6.3. Condition de débit massique à
l'entrée 20
I.6.4. Condition de pression à la sortie
20
I.6.5. Condition de parois 20
I.7. Conclusion 21
CHAPITRE II : SIMULATION NUMERIQUE & MAILLAGE
HYBRIDE
II.1. Introduction 22
II.2. Processus de simulation numérique
22
II.2.1. Modélisation Géométrique
23
II.2.2. Maillage 23
II.2.2.1. Génération de maillage
24
II.2.2.2. Composants du maillage 24
II.2.2.3. Choix du type de maillage 25
II.2.2.4. Techniques générales de
génération du maillage 27
II.2.2.5. Qualité d'un maillage 27
II.2.2.6. Génération de maillage couche
limite 29
II.2.2.7. Indépendance de la solution du maillage
29
II.2.3. Resolution 30
II.2.4. Analyse et Visualisation 30
II.3. Les Logiciels de Simulation Numérique
31
II.3.1. ICEM CFD 31
II.3.2. Le Solveur Fluent 32
II.4. Maillage hybride 33
II.4.1. Position du problème 33
II.4.2. Historique des maillages hybrides 33
II.4.3. Processus de génération de
maillage hybride (prisme) 35
II.4.3.1. Lois de croissance (Growth Law)
35
II.5. Conclusions 37
CHAPITRE III : GENERATION DE MAILLAGE HYBRIDE &
SOLUTION SUR ARA M100
III.1. Introduction 38
III.2. Définition de la géométrie
ARA M100 Aile-Fuselage 38
III.2.1. Plan de symétrie 38
III.2.2. Aile 38
III.2.3. Extrémité d'aile (Tip)
38
III.2.4. Dimensions de la géométrie ARA
M100 39
III.3. Génération du maillage (ICEM CFD 13)
40
III.3.1. Génération de maillage
tétraédrique 40
III.3.1.1. Importation de la géométrie et
nettoyage de la CAO 40
III.3.1.2. Création des familles 41
III.3.1.3. Définition du domaine « FLUID
» 41
III.3.1.4. Paramètres de maillage 42
III.3.1.5. Choix et génération de type de
maillage 43
III.3.1.6. Vérification de maillage 43
III.3.2. Génération des couches de prisme
sur ARA M100 44
III.3.2.1. Paramètres général des
prismes 44
III.3.2.2. Paramètres de prismes sur chaque partie
de la géométrie 45
III.3.2.3. Lancement de maillage prismatique
45
III.3.3. Exportation vers Fluent 13 47
III.4. Solution par Fluent 47
III.4.1. Principales étapes de simulation sous
Fluent 47
III.4.1.1. Importation du fichier (*.msh) 47
III.4.1.2. Vérification du maillage importé
48
III.4.1.3. Lissage du maillage (Smooth and Swap the Grid)
49
III.4.1.4. Vérification de l'échelle
49
III.4.1.5. Choix du modèle de turbulence
50
III.4.1.6. Définition des caractéristiques
du fluide 51
III.4.1.7. Conditions opérationnel 52
III.4.1.8. Conditions aux limites 53
III.4.1.9. Choix des critères de convergence
54
III.4.1.10. Initialisation des calculs 56
III.4.1.11. Animation 56
III.4.1.12. Sauvegarde du fichier *.cas 57
III.4.1.13. Lancement de la simulation 57
III.5. Conclusion 58
CHAPITRE IV : RESULTATS ET VALIDATION
IV.1. Introduction 59
IV.2. Les Conditions aux limites 59
IV.3. Première simulation 59
IV.3.1. Calcule non visqueux 59
IV.3.1.1. Configuration d'écoulement
59
IV.3.1.2. L'histoire de convergence des résidus
60
IV.3.1.3. L'histoire de convergence des coefficients Cd,
Cl et Cm 60
IV.1.3. Les contours de pression et vitesse autour d'ARA
M100 62
IV.1.3.1. Contours de pression statique sur
62
IV.1.3.2. Contours de Mach sur ARA M100 63
IV.4. Deuxième simulation 64
IV.4.1. Calcule visqueux pour le model de turbulence K
epsilon 64
IV.4.1.1. L'histoire de convergence des résidus
64
IV.4.1.2. L'histoire de convergence des coefficients Cd,
Cl et Cm 64
IV.4.1.3. Vérification de maillage 66
IV.4.1.4. Contours de pression statique sur ARA M100
67
IV.4.1.5. Contours de pression statique sur le profil
d'aile 68
IV.4.1.6. Contours de mach sur l'avion 68
IV.4.1.7. Contours de Mach sur le profil d'aile
69
IV.4.1.8. Vecteurs vitesse sur l'avion au plan de
symétrie 70
IV.4.1.9. Vecteurs vitesse sur le profil d'aile
71
IV.5. Contours de coefficient de pression
72
IV.5.1. Distribution du coefficient de pression sur
l'intrados et l'extrados 73
IV.6. Troisième simulation 75
IV.6.1. Calcule visqueux pour le model de turbulence K
epsilon 75
IV.6.1.1. Configuration d'écoulement
75
IV.6.1.2. Contours de pression statique sur ARA M100 pour
chaque á 76
IV.6.1.3. Contours de pression statique sur le profil
d'aile pour chaque á 77
IV.6.1.4. Contours de Mach sur ARA M100 pour chaque
á 78
IV.6.1.5. Contours de Mach sur le profil d'aile pour
chaque á 79
IV.6.1.6. Coefficient de pression pour chaque á
80
IV.7. Forces de chaque angle d'incidence 82
IV.8.Calcule des coefficients pour chaque á
82
IV.8.1. Courbe du coefficient de portance Cl
83
IV.8.2. Courbe du coefficient de trainée Cd
83
IV.8.3. La polaire 84
IV.9. Conclusion 84
CONCLUSION GENERALE 85
ANNEXE A
ANNEXE B
INTRODUCTION
La simulation numérique est une activité
du processus de conception de produits manufacturiers. Sa mise en oeuvre dans
les systèmes de production industrielle se base essentiellement sur des
méthodes aux éléments finis. Cette méthode requiert
basiquement un maillage comme représentation du système
étudié. De nombreux travaux de recherche, depuis plusieurs
décennies [1, 2], ont porté sur la mise en place de mailleurs.
Toutefois l'activité de maillage demeure fastidieuse et couteuse en
temps ingénieur. Plusieurs jours, semaines ou mois sont consacrés
au maillage de structures, maillage parfois exploité dans une unique
simulation.
Ce mémoire présent une approche pour la
gestion de processus de maillages hybrides. Les maillages hybrides concernent
des maillages pour lesquels les spécifications de construction ne sont
pas uniformes sur l'ensemble du système. Cette classe de maillage
évoque des maillages associant différents types
d'éléments, différentes variétés pour leurs
sous-domaines, différents modes de constructions, différentes
sources de définition, etc. Ainsi la production de maillages hybrides
passe souvent par l'association de plusieurs techniques de
maillages.
La conception de grands systèmes, correspond
souvent à l'assemblage de la conception de systèmes plus petits,
qui sont modélisés dans des environnements logiciels
hétérogènes. Ainsi l'activité de production de
maillages ne s'appuie pas sur un mais plutôt plusieurs supports
géométriques issus de logiciels ou de pratiques différents
(plans papier, outils CAO divers, ingénierie inverse, etc.). Avant toute
procédure de maillage, l'intégration des différents
supports sources doit être envisagée. Cette intégration
s'appuie en général sur des techniques d'échanges de
données qui imposent des conversions et des duplications explicites des
supports initiaux, taches induisant des erreurs de modélisation dans les
objets finalement utilisés.
L'intégration dans un même modèle
est aussi une source de difficultés (positionnement, fusion des sous
domaines, etc.). Enfin une idéalisation des supports intervient à
tout moment dans ces procédures. Le ou les supports
géométriques sont alors maillés avec les outils à
disposition. Si plusieurs supports géométriques sont
maillés indépendamment, une fusion des maillages est finalement
nécessaire. Beaucoup d'outils de maillages sont disponibles et le choix
des outils est alors affaire de spécialiste.
Architecture du mémoire
Ce travail a été développé
à partir du plan suivant :
Afin d'exposer les différents types
d'écoulements, le premier chapitre débute par quelques notions de
base en mécanique des Fluides, et un rappel sur les principes
généraux de la couche limite, la dynamique des différentes
structures de la couche limite laminaire et turbulente et la physique de
décollement de la couche limite. En fin une modélisation de la
turbulence et quelques définitions de ces model les plus utilisés
dans la simulation numérique.
Au cours du deuxième chapitre, une étude
générale des processus de simulation numérique
appliqué à la mécanique des fluides a été
définie, pour cela nous avons décrit le choix du type de maillage
et les techniques générales de génération de
maillage et Une définition des logiciels utilisés dans notre
simulation (ICEM et FLUENT). En fin une historique des maillages hybrides et
les lois correspondantes pour générer un maillage
prismatique.
Dans le troisième chapitre, nous avons
présenté une définition de la géométrie ARA
M100, ainsi que les processus de génération de maillage
tétraédrique et prismatique dans ICEM CFD 13 sur la configuration
Ail-Fuselage du model ARA M100. Et en fin les étapes de la solution dans
Fluent 13.
Le quatrième chapitre présente les
différents résultats obtenus par Fluent, ainsi que leur
validation avec l'expérimental et leur interprétation en vue de
les exploités.
Le présent mémoire se termine par une
conclusion générale résumant les contributions de la
thèse et présentant les difficultés et perspectives
à court terme qui en découlent.

CHAPITRE
I RAPPEL DE LA
DYNAMIQUE DES
FLUIDES
SOMMAIRE PAGE
I.1. Introduction 3
I.2. Les équations fondamentales de la dynamique
des fluides 3
I.3. Les différents types d'écoulements
6
I.4. Couche Limite 8
I.5. Turbulence 13
I.6. Les conditions aux limites 19
I.7. Conclusion 21
=
OZ CI (I. 1)
|
,
div pU
|
=0=
|
Ou Ox +
|
Ov Oy +
|
Ow
I.1.Introduction
L'utilité pratique de la mécanique des
fluides est évidente à partir de ces applications technologiques
qui couvrent tout un ensemble de domaines ceci est appuyé par
l'avancement spectaculaire des secteurs technologiques dans les quels la
qualité et l'originalité des solutions des problèmes
d'écoulement ont joué un rôle primordial dans le
développement des secteurs de transport (avion, bateaux, voitures) et le
secteur de production d'énergie (turbines, compresseurs,
réacteurs).
L'étude théorique dans ces domaines
nécessite l'utilisation des équations non linéaire de base
comme les équations de Navier Stokes. Cette dernière
résout les problèmes de la dynamique des fluides qui sont
généralement difficiles à résoudre. C'est pour cela
que la résolution de ces équations nécessite les
méthodes de calculs numériques.
I.2.Les équations fondamentales de la dynamique
des fluides
On peut définir le comportement d'un fluide
à partir de la résolution des équations
mathématiques fondamentales, mais il faut tenir compte des principes de
conservation, tirés de la physique de ce fluide, ces principes sont
:
· Principe de la conservation de la
masse.
· Principe de la conservation de la quantité
de mouvement.
I.2.1. Principe de conservation de la masse
C'est un principe de physique, qui permet
d'établir une relation entre certaines caractéristiques du fluide
et ses mouvements, indépendamment des causes qui le provoquent. {Quelque
soit le volume D du fluide que l'on suit dans son mouvement, sa masse m reste
constante (Fluide Conservatif)}.
Il se traduit par l'équation de
continuité, sous sa forme générale.
Dans le cas d'un fluide permanent (stationnaire), et
incompressible, ou la masse volumique est invariable, l'équation de
continuité se réduit à :
I.2.2. Principe de conservation de la quantité de
mouvement
C'est un principe de mécanique qui permet
d'établir des relations entre les caractéristiques du fluide,
celles de ces mouvements et les causes qui les produisent (Forces).
Ce principe se traduit par les équations de
Navier- Stokes, qui ont été établies en 1822 par ces
derniers. On les obtient en écrivant l'équilibre du
système de forces s'exerçant sur un
parallélépipède élémentaires dx, dy, dz
:
Forces extérieures : F ~~~~
|
(force de volume)
|
Forces de Pression : - grad ~~~~~~~~~~~
P
Forces d'inertie i Forces de Viscosité
fi?v
|
P (forces de surface)
|
|
Pour un fluide incompressible, on a :
1
grad ~~~~~~~~~~~~~
P
|
~
P = F
|
- i + fi?v (I. 2)
|
|
Et sous forme cartésiennes, par projections sur
les trois axes :
1
P
|
OP
= ~~
~~
|
au
a + v?u (I. 3)
|
|
av
a + v?v (I. 4)
OP
= FY
~~
1
P

OP
=
~$
~~
Ow
a + v?w (I. 5)
1
P

Avec :
|
02
?=
axe +
|
a2
aye +
|
a2
az2 (I. 6)
|
|
a
+ u
a
a
+ v
ax
a
+ w
ay
a2
az2 (I.7)
a
?
a
=

D'une manière générale, lorsque
le fluide en écoulement est newtonien (c'est-a-dire lorsque la relation
contrainte-taux de déformation est linéaire et isotrope), les
équations de conservation de la quantité de mouvement prennent la
forme particulièrement simple des équations de Navier
Stokes.
I.2.3. Les équations de Navier-Stokes
Nous allons maintenant établir ces
équations en supposant, pour simplifier, que la viscosité
dynamique ì reste constante dans tout
l'écoulement. Si cette viscosité n'est pas constante, des termes
supplémentaires apparaissent dans les équations du mouvement.
Nous parlons ici de l'équation de conservation de la quantité de
mouvement projetée suivant l'axe i.
= - + ~~) +
dill
dxi(I..8))
P
dvi OP
Cette équation exprime l'égalité
entre la quantité d'accélération par unité de
volume et les forces extérieures qui s'appliquent l'unité de
volume (pression, forces volumiques, contraintes visqueuses). Dans le cas d'un
fluide newtonien, les contraintes visqueuses ont pour forme :
*)+ = - .~~) + ~~+ / - 2 3 -0?.
34)+ (I. 9)
~~+ ~~)
Nous devons maintenant calculer6789'
commeìp est constant, on a :6:8i
dill
dx1
|
= - ;~&~) + ~ <~~) => - 2 3
- ~ 0?. 34)+ ~~+~~+ ~~) ~~) ~~+ )
|
(I. 10)
|
|
Ou encore :
[
dill
dXj
02. 022 0= = 1.1
v
is+ + ?V.. v)-
11 ?.. v)
OxiäXj 0.7Ci33 0.7Ci(I.
.11)
On obtient finalement :
dill
dXj
|
= -?&~) + - 0?. . v) (I. 12)
3 Oxi
|
|
Etl'équationn (I.10) devient :
dvi OP
+ ~~) + -?&~) + -
~ = - 0?. 3 (I. 13)
~ ~~) 3 ~~) i
Sous forme explicite, on peut écrire
:
dVi ~ d
OP ~
+ ~~~ + -?&~~ + -
= - 0?. 3 (I. 14)
~~~
3 oxi
dv2 OP ~
+ ~~& + -?&~& + -
~ = - 0?. 3 (I. 15)
~ ~~& 3 ~~&
dv3 OP~
+ ~~? + -?&~? + -
~ = - 0?. 3 (I. 16)
~ ~~? 3 ~~?
On peut aussi représenter ces
troiéquationsns sous forme vectorielle compacte. Les expressions
précédentes sont appeléeéquationsns de
Navier-Stokes.
Lorsque le fluide est incompressibleÄ.õti =
0 et le dernier termdisparaîtit on a alors
:
~ dv -?PVP + pg
p?2v2v (I. 17)
Leéquationsns de Navier-Stokes
sontrèses complexes, des solutions Analytiques lie peuvenêtrere
obtenues que par certaines configurations simples. On peut dire que si on sait
leintégrer,r, on pourrairésoudrere analytiquement
leproblèmeses d'hydrodynamique. I.3.3. Ledifférentsts
typed'écoulementsts
Nous allons maintenant donner une description
qualitative rapide de quelques
typed'écoulements.s
I.3.1.1. Ecoulements incompressibles et
compressibles
On dit qu'un fluide est incompressible si sa
massspécifiqueue varie faiblement avec la pression ou
ltempérature.e. Ainsi la variation relative de massspécifiqueue
pour l'eau esÄñ/ñ/p = 5x104 pour une variation
dtempératurerÄTAT = 10K eÄñ/ñ/p =
2x10-4 pour une variation de pressioÄñOp = 1bar. On peut
donc souvent traiter l'eau comme un fluide incompressible et utiliser dans
leéquationsns du mouvement undensité
tñ=ño=constante.e. Dans le cas des gaz trèses
généralement, les gaz sont traités comme des fluides
compressibles. Cependant nous verrons qu'aux faibles vitesses
d'écoulement (aux nombre de mach petits devant uM<<M« 1, les
variations de densité sont faibles grandeur du carre du nombre de
mach
?p =Ap
/4M « 1<<1 (I. 18 ~
)
Dans ces conditions, on peut
traitel'écoulementnà a l'aide deéquationsns
qurégissentnt leécoulementsts
incompressibles.
I.3.2. Ecoulement laminaire et écoulements
turbulent
Un écoulement turbulent peut être
caractérise par une orientation aléatoire (ou fluctuation) des
vecteurs vitesses en chaque point ; autrement dit chaque composante
u(M,
t),
v(M,
t),
w(M,
t), de V(M,
t) Obéissent à des lois de
distributions (au sens probabiliste) en fonction de l'espace et du temps. On
dit que le régime de l'écoulement est turbulent. Un
écoulement turbulent peut posséder une composante moyenne
a (le mouvement global se fait d'ouest en est par
exemple) pouvant dépendre du temps mais de manière plus «
régulière »; les fluctuations ont alors lieu autour de cette
composante moyenne, de sorte que la vitesse s'écrit :
B0@, 3 = ~~~ + D (I.19)
C'est alors Sur v' que l'on fait apparaitre des lois
statistiques.
Dans un écoulement laminaire, le mouvement du
fluide s'effectue en « couches » parallèle entre elles, chaque
couche possédant sa propre vitesse ; le profit de vitesses dans le
fluide en mouvement est biens ordonne. Les vecteurs vitesses conservent une
orientation stable au cours du temps. On dit que le régime de
l'écoulement est laminaire. Lorsque le mouvement laminaire du fluide
dégénère en un écoulement turbulent, il perd son
caractère ordonne et stable ; on dit qu'il y a transition du
régime laminaire vers le régime turbulent, ou plus simplement
transition laminaire turbulent.
La différence entre le régime turbulent et
le régime laminaire peut être représenté par les
courbes donnant la vitesse en fonction du temps en un point M fixe.
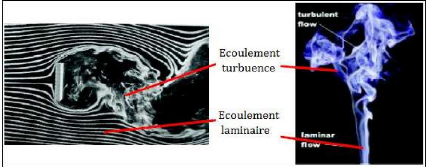
Figure (I.1) : Plaque plane mise à
l'écoulement. [3] Figure (I.2) : Fumée d'une
cigarette.
I.3.3. Ecoulement stationnaire et instationnaire
On dit qu'un écoulement est stationnaire si en
tout point M de Ù, toutes les variables décrivant le mouvement
sont indépendants du temps. Ainsi la pression
P, la vitesse õ, la densité ñ,
l'énergie e d'un écoulement
stationnaire sont des quantités indépendantes du
temps.
I7(m, 3 = I7(m) ?M ? c/ (I.
20)
Tous les phénomènes de propagation
d'onde dans les fluides appartiennent à cette catégorie (onde
à surface d'un liquide, rayonnement d'ondes sonores à partir d'un
jet libre turbulent...), les écoulements atmosphériques sont
aussi essentiellement instationnaires. Les écoulements turbulents sont
aussi par nature instationnaire, cependant on dit qu'un écoulement
turbulent est instationnaire si les variables moyennes sont
indépendantes du temps et si les corrélations d'ordre deux
constituées a partir de ces variables sont invariantes par
transition.
I.3.4. Ecoulement irrotationnel
On dit qu'à un instant t donne,
l'écoulement est irrotationnel dans le domaine D si le rotationnel de la
vitesse V(M, 3 est nul en chacun des points M de D.
ro f, = 0 (I. 21)
Le rotationnel est un vecteur (défini en
cinématique des fluides) qui caractérise en un point M, la
rotation dans l'espace de la particule fluide.
Il s'écrit symboliquement :
.o V(M, 3 = ?~~^V(M, 3 (I. 22)
Il s'écrit par exemple en coordonnées
cartésiennes :
law(M, 3av(M,Trau(M, 3 aw(M,1-- rav(M,
3 au(M, 3].
r;', I7(M, 3 ay az X + az ax Y + ax ay Z (I.
233
I.4. Couche Limite
Si le fluide était parfait, la seule force
crée par le positionnement d'un profil dans un écoulement est une
force de portance perpendiculaire à la vitesse.
Mais l'air n'est pas un fluide parfait. Il est visqueux,
ce qui engendre un frottement le long du profil de l'aile.
La partie du fluide qui est infiniment proche de la
paroi d'un profil possède donc une vitesse nulle. Il en résulte
un accroissement progressif de la vitesse au fur et à mesure que l'on
s'éloigne de la paroi. La zone dans laquelle l'écoulement est
freiné de par sa proximité avec la paroi est appelée
couche limite. Il s'agit de la zone dans laquelle la vitesse de
l'écoulement est comprise entre 0 et 99% de la vitesse à l'infini
sur la normale à la paroi.
Cette couche limite est également
dépendante de l'état de surface du profil, donc on peut dire que
:
La couche limite est la mince pellicule entourant un
corps en mouvement dans un fluide (air). Dans cette mince pellicule les forces
de viscosité sont importantes.
La couche limite conditionne directement la
résistance de frottement du corps en mouvement dans le
fluide.
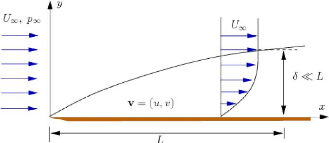
Figure (I.3) : Forme de la couche limite sur une plaque
I.4.1. Epaisseur de la Couche Limite
L'épaisseur de la couche limite croit de
l'amont (quelque mm) vers l'aval (quelque Cm). Conventionnellement
l'épaisseur de la couche limite est la distance à la paroi
à partir de laquelle U = 0,99 U0
I.4.1.1. Epaisseur de déplacement ä*
Les lignes de courants en écoulement visqueux
sont déplacées par rapport à leurs positions en fluide
non-visqueux.
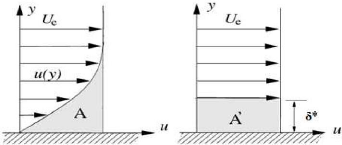
Figure (I.4) : Epaisseur de la Couche Limite
Ce déplacement est exploites pour définir
une épaisseur tel que les aires A et A' soient égales
:
S
4* = O <1 - ~ P=
0
|
dy (I.24)
|
|
I.4.1.2. Epaisseur de quantité de mouvement
è
Correspond à la perte de quantité de
mouvement dans la CL par rapport à un écoulement de fluide
parfait (à débit masse équivalent)
8 = OR
SU (1 - U Ue) d)1 (I. 25)
Ue
I.4.1.3. Facteur de forme H
Rapport des deux épaisseurs
précédemment définies :
8*
H = 8 (I. 26)
I.4.2. Décollement de la Couche Limite
La théorie de la couche limite laminaire montre
que le profil des vitesses se modifie sous l'effet d'un gradient longitudinal
de pression positif.
La pente à l'origine peut devenir nulle,
caractérisant le point de décollement. Il est en est de
même pour une couche limite turbulente.
· De A à T les vecteurs vitesses restent
parallèles entre eux sur une normale à la paroi : la couche
limite est laminaire.
· A partir de T, les vecteurs vitesses ne sont
plus parallèles entre eux, mais les vecteurs vitesse moyenne restent
parallèles entre eux. La couche limite est turbulente. T est le point de
transition, sa position dépend essentiellement du nombre de Reynolds, de
l'état de surface et du nombre de Mach. La couche limite turbulente est
d'autant plus importante que Re est grand.
· A partir de D, la couche limite se
décolle, les particules près de la paroi voient leur mouvement
s'inverser et entraînent la formation de tourbillons (d'où forte
augmentation de la traînée). D est le point de
décollement.
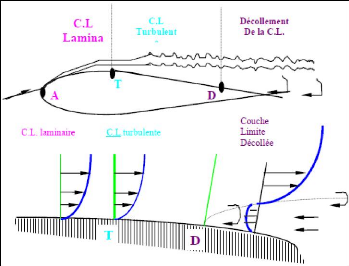
Figure (I.5) : Décollement de la Couche
Limite
La figure (I.5) montre l'évolution progressive
du profil des vitesses d'amont en avale: lorsque la vitesse s'annule dans les
couches inférieures, le fluide sous l'effet de la pression plus grande
en aval qu'en amont prend une vitesse de sens opposé à celui de
la vitesse de l'écoulement extérieur, créant un courant de
retour. [4]
L'expérience met en évidence le
phénomène très important dit « décollement
libre » dont la position peut être prévue lorsqu'on
étudie le développement d'une couche limite et en particulier
l'évolution du coefficient local de frottement puisque celui-ci s'annule
au point de décollement.
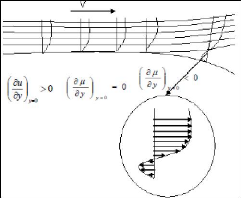
Figure (I.6) : Ecoulement avec gradient longitudinal de
pression positif (D est le point de décollement de la couche
limite).
Pour les applications, il est très important
de noter qu'une couche limite turbulente décolle moins facilement qu'une
couche limite laminaire, étant donné l'échange intense
d'énergie à l'échelle macroscopique qui existe entre les
couches inférieures dans une couche limite turbulente.
Les écoulements décollés
tridimensionnels sont caractérisés par la présence de
structures tourbillonnaires définies comme des concentrations spatiales
de vorticité résultant du décollement de la couche limite
figure (I.6).
Une fois que le décollement a eu lieu, la
vorticité tend à se concentrer au voisinage de surfaces dont
l'enroulement forme les tourbillons. Dans la réalité, de telles
surfaces définies comme support de discontinuités (ou
singularités) n'existent pas. Ces concepts appartiennent aux
modèles de fluide parfait. Dans le monde réel, la
vorticité est répartie dans l'espace et occupe un certain volume
dans le voisinage de ce que l'on appelle une surface de
décollement.
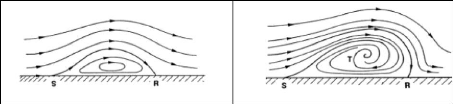
(a) écoulement bidimensionnel (b)
écoulement tridimensionnel
Figure (I.7) : Conceptions simples du
décollement.
I.4.3. Couche limite turbulente
Profil de vitesse dans la couche limite turbulente
:
· Équation de quantité de mouvement
:
äu U + v
äx
|
äu
=
äy
|
äy <v äu
ä äy= + ä äy
U-~'v'WWWWWX (I. 27)
|
|
· Proximité immédiate de la paroi :
terme de frottement laminaire dominant (vitesses moyennes et fluctuations de
vitesses ?0 quand y ?0
Y" Zv Ou
O Y"\ 0 Quand y ? 0 ~ = dy = ef g y (I.
28)
Zone de très proche paroi = sous-couche visqueuse
(viscous sub-layer)
· Echelle caractéristique de la vitesse =
vitesse de frottement
· Variables sans dimension pertinentes dans la zone
proche paroi :
U Ut)'
U+ = , y+ = (I.30)
Ue
· Relation de très proche paroi valable
jusqu'à y+ ? [10, 5]
u = i (I.31)
· Lorsque l'on quitte la sous-couche visqueuse,
le frottement turbulent devient peu à peu prépondérant par
rapport au frottement laminaire (faibles vitesses termes d'inertie
négligeables) -dans cette zone, le frottement total reste à peu
près constant et égal à -la vitesse moyenne reste de
l'ordre de la vitesse de frottement -l'échelle caractéristique de
longueur reste
Ui = f(yi) (I.32)
· Lorsque l'on continue à
s'éloigner de la paroi, frottement turbulent et inertie deviennent
dominants devant le frottement laminaire -déficit de vitesse de l'ordre
de la vitesse de frottement -échelle de longueur de l'ordre de
l'épaisseur de CL
Ue - U = g (y 4) = 0k3 (I.
33)
UT
· Lorsque l'on est à l'extérieur de
la CL seul le terme d'inertie est dominant, les frottements laminaire et
turbulent devenant négligeables
I.5. Turbulence
Le phénomène de turbulence se manifeste
par un champ de vitesse fluctuant. Ces fluctuations des variables de
l'écoulement peuvent être d'un petit ordre de grandeur et
atteindre des hautes fréquences. La résolution directe des
équations régissant les écoulements turbulents est
extrêmement onéreuse, compte tenu des temps de calcul et des
moyens informatiques requis.
Cependant, la solution instantanée (exacte) des
équations gouvernantes peut être
moyennée en temps, tout
en éliminant les grandeurs de faible échelle de turbulence,
ce
qui rend la résolution des équations résultantes
moins coûteuse. Néanmoins, cette
modélisation fait apparaître des variables
inconnues supplémentaires qui doivent être
déterminées en utilisant des modèles dits de
turbulence.
I.5.1. Modélisation de la turbulence
Il n'y a pas de modèle de turbulence universel
valable pour modéliser tous les cas d'écoulements. Le choix d'un
modèle de turbulence dépend de certaines considérations
telles que la physique du problème traité, le niveau de
précision exigé, les ressources informatiques disponibles et le
temps disponible pour effectuer la simulation.
Afin de choisir le modèle le plus
approprié à chaque application donnée, il est
nécessaire de comprendre les principes et les limites de chaque
modèle de turbulence.
I.5.2. Nombre de Reynolds
Le nombre de Reynolds (Re)
est un nombre sans dimension utilisé en mécanique des fluides. Il
a été mis en évidence en 1883 par Osborne Reynolds. Il
caractérise un écoulement, en particulier la nature de son
régime laminaire, transitoire, et turbulent. Le nombre de Reynolds
représente le rapport entre les forces d'inertie et les forces
visqueuses. On le définit par:
L.0
Re = V (I. 34)
Avec :
U : vitesse du fluide [m/s]
L : longueur caractéristique
[m]
í : viscosité cinématique
du fluide : [m2/s]
Le nombre de Reynolds s'interprète alors comme le
rapport entre forces d'inertie et forces visqueuses. Donc on distingue trois
principaux régimes :
· Aux faibles valeurs du Reynolds
(inférieures à 2000) : les forces de viscosité sont
prépondérantes, l'accélération convective
étant négligée ; L'écoulement est laminaire. De
plus, comme l'inertie est négligeable, l'écoulement du fluide est
réversible. C'est-àdire si les forces extérieures sont
soudainement stoppées, le fluide s'arrête immédiatement, et
si les forces extérieures sont inversées, le fluide repart en
sens inverse.
· Aux valeurs intermédiaires du Reynolds
(entre 2000 et 3000 environ) : les forces d'inertie sont
prépondérantes, mais l'écoulement reste laminaire.
Cependant, il n'est plus réversible: si l'on stoppe les forces
extérieures, le fluide continu partiellement sur sa
lancée.
· Aux fortes valeurs du Reynolds (au-delà
d'environ 3000) : les forces d'inertie sont si importantes que
l'écoulement devient turbulent. Entre les régimes laminaire et
turbulent, on parle de régime transitoire.
I.5.3. Nombre de Mach" M "
Pour comparer la vitesse « U» d'un
écoulement et la vitesse « a » du son, il est
intéressant d'introduire le rapport sans dimension « U/a »
appelé Nombre de Mach.
U
M =
a (I.35)
* Si U < a ? M < 1 : l'écoulement est
subsonique.
* Si U > a ? M > 1 : l'écoulement est
supersonique. * Si U = a ? M = 1 : l'écoulement est sonique.
En mécanique de vol on définie plusieurs
nombres de Mach:
· Le nombre de Mach général : C'est
le nombre de Mach correspondant à la vitesse de l'avion « U »
et la vitesse du son « a » à l'altitude de Vol.
· Les nombres de Mach locaux: Qui correspondent par
exemple à des survitesses locales sur l'extrados.
I.5.4. Les modèles de turbulence
Les écoulements turbulents sont
caractérisés par les champs de fluctuation de
Vitesse.
Ces fluctuations mélangent des quantités
transportées telle que l'énergie, la concentration
D'espèce,... Ces fluctuations peuvent être de petite
échelle et de haute fréquence, elles sont d'un point de vue
informatique trop ardu pour être simuler directement dans des calculs
pratiques en technologie.
En alternative les équations régissantes
(exactes) instantanées peuvent être remplace
par des
équations a variables moyennes temporelles ramenée a des
structures a petites
échelles, afin d'obtenir un ensemble
d'équations modifie qui sont plus simple à
résoudre.
I.5.4.1. Le modèle Spalart-Allmaras
Le modèle Spalart-Allmaras est une formulation
simple à une équation. Ce modèle est surtout
destiné à des applications aérospatiales, et il a
donné des résultats satisfaisants concernant les calculs des
couches limites soumises à de très forts gradients de pressions.
Il devient de plus en plus populaire dans d'autres applications telles que les
turbomachines.
Sous sa formulation originale, le modèle
Spalart-Allmaras est un modèle de turbulence à bas nombre de
Reynolds nécessitant la résolution complète des
équations de la couche limite.
Cependant, certains codes de CFD couplent ce
modèle avec des fonctions de parois lorsque la résolution du
maillage n'est pas suffisamment fine. En outre, ce modèle est moins
sensible aux erreurs numériques que les modèles k-å et
k-ù.
Cependant, les équations modifiées
contiennent des variables inconnues additionnelles, et des modèles de
turbulence sont nécessaires pour déterminer ces variables en
termes de quantités connues.
I.5.4.2. Le modèle k-å
Les modèles de turbulence les plus populaires
sont les modèles dits à deux équations dont le
modèle k-å. Il est fréquemment utilisé dans de
nombreux calculs d'ingénierie. Il est basé sur la formulation
proposée par Launder et Spalding. [5]
La robustesse, l'économie, et la
précision dans la prédiction d'une large gamme de
problèmes d'écoulements turbulents, expliquent sa
popularité dans la simulation des écoulements industriels et les
problèmes de transfert de chaleur. Le modèle k-å est un
modèle semi empirique et les équations utilisées
découlent des considérations phénoménologiques et
empiriques.
Par rapport à sa formulation d'origine, le
modèle a subi des améliorations pour l'adapter au mieux à
certains cas d'écoulement. On retrouve ainsi la variante k-å - RNG
(Re Normalisation Group) [6] et k-å modifié. [7]
I.5.4.3. Le modèle k-ù standard et le
modèle k- ù -SST
Le modèle k-ù est basé sur la
formulation de Wilcox [8], dans laquelle il a introduit des modifications qui
tiennent compte des effets liés aux bas Reynolds et à la
compressibilité. Les deux variantes du modèle k- ù,
Standard et SST, sont des modèles semi empiriques et ils ont la
même forme mathématique que les équations de transport de k
et de ù. Le modèle k- ù -SST est basé sur la
formulation proposée par Menter. [9]
I.5.4.4. Modèle à contrainte de Reynolds
RSM (Reynolds Stress Model)
Ce modèle est encore plus sophistiqué.
Il évite de faire l'hypothèse d'isotropie de la viscosité
turbulente, car il résout les équations pour les six composantes
des contraintes de Reynolds et pour å. Ce modèle est donc
très lourd numériquement et la convergence est souvent difficile.
Il existe de nombreuses variantes de ce modèle, qui concernent en
particulier la façon de modéliser la corrélation de la
fluctuation de la pression et la déformation. Ce modèle est
préconisé dans le cas des écoulements fortement
tourbillonnaires, comme par exemple dans le cas d'un cyclone ou d'un injecteur
dans une chaudière à combustion. [10.11.12]
I.5.4.5. Large Eddy Simulation (LES)
Dans l'approche LES, toutes les échelles de la
turbulence sont résolues sauf celle relative à la dissipation,
qui est modélisée. Il faut donc utiliser un maillage très
fin et opter pour une solution instationnaire dans la résolution des
équations. Après un temps de calcul assez long, la solution peut
reproduire toutes les échelles de la turbulence. Ce modèle est
très puissant dans le cas où les écoulements ne sont pas
dominés par la présence des parois parce qu'il faut alors un
maillage très fin ou l'utilisation d'une fonction de parois dans cette
région. Ce modèle permet d'accéder à un tel niveau
de détails qu'il peut être utilisé pour la
prédiction du bruit.
Avec l'augmentation de la puissance des ordinateurs,
ce modèle est devenu plus intéressant. Mais il faut éviter
de l'utiliser avec un maillage trop lâche, ou pour des simulations en
deux dimensions parce que le modèle s'appuie sur des
phénomènes tridimensionnels.
I.5.4.6. Simulation directe (DNS) ou Direct Numerical
Simulation
DNS est théoriquement l'approche la plus
puissante car elle fait appel à un maillage très fin et à
un pas de temps très petit pour résoudre les équations de
Navier-Stokes sans aucun modèle. Mais avec les plus puissants
ordinateurs, on ne peut aujourd'hui étudier que les écoulements
simples. Donc, cette approche n'a encore aucune utilité industrielle.
Elle reste réservée à la recherche et à la
construction de modèles.
I.5.5. Calcul en proche paroi
Les écoulements turbulents sont sensiblement
influencés par la présence des parois. Dans les zones très
proches des parois, les effets de viscosité réduisent les
fluctuations des vitesses tangentielles. En dehors de la zone de proche paroi,
la turbulence apparaît plus rapidement par la production d'énergie
cinétique turbulente due au gradient de vitesse moyenne.
La modélisation des zones de proche paroi a un
impact significatif sur les résultats de la simulation numérique
car la présence des parois constitue la principale source de
vorticité et de turbulence et les variables de l'écoulement
turbulent y présentent un fort gradient. Les modèles de
turbulence définis précédemment (k-å, RSM, LES),
demeurent valables pour le calcul des écoulements turbulents loin des
parois, cependant ces modèles doivent être
développés initialement pour être appliqués dans
toute l'étendue de la couche limite à condition que la
résolution du maillage soit satisfaisante.
Beaucoup d'expériences ont montré que la
région proche paroi peut être divisée en trois couches.
Dans la première couche appelée sous-couche visqueuse,
l'écoulement est presque laminaire, la viscosité joue un
rôle dominant sur l'écoulement et les phénomènes
physiques associés (transferts de chaleur, etc.). Dans la zone
externe
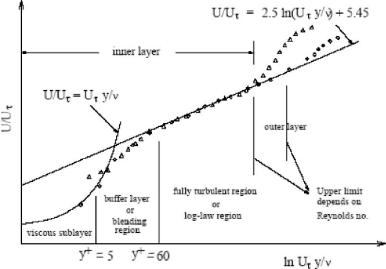
appelé zone logarithmique, c'est plutôt la
turbulence qui joue un rôle prépondérant. Finalement une
zone intermédiaire entre la sous couche visqueuse et la zone
logarithmique associe les effets de la turbulence et les effets de la
viscosité est définie. Figure (I.8) illustre la subdivision de la
zone de proche paroi.
Figure (I.8) : Division de la région proche
paroi
I.5.5.1. Modélisation de l'écoulement en
proche paroi
Il existe deux approches pour modéliser
l'écoulement en proche paroi. La première approche consiste
à ne pas résoudre l'écoulement dans la région de la
sous couche visqueuse et d'appliquer des fonctions empiriques dites fonctions
de paroi. Cependant, l'utilisation de ces fonctions exige la modification et
l'adaptation des modèles de turbulence pour tenir compte de la
présence des parois dans l'écoulement.
Dans la deuxième approche, les modèles
de turbulence sont adaptés afin de résoudre toutes les
sous-couches y compris la sous couche-visqueuse, cette approche appelée
approche proche paroi nécessite un maillage très raffiné
près des parois. Figure (I.9) résume la différence entre
ces deux approches :
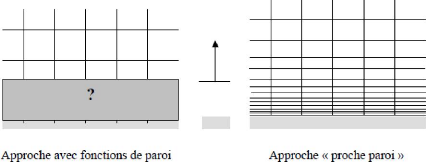
Figure (I.9) : Modélisation de la couche
limite.
Dans la plupart des écoulements turbulents
à haut Reynolds, l'approche basée sur fonctions de paroi
réduit considérablement les besoins en ressources informatiques.
Cette approche demeure très populaire pour sa robustesse, son
économie et sa précision, et elle est largement utilisée
dans beaucoup d'applications industrielles.
Cependant, cette approche est inadéquate pour
la modélisation des écoulements où les effets liés
aux bas Reynolds sont prépondérants et les hypothèses
concernant les fonctions de paroi ne sont plus valables.
I.6. Les conditions aux limites
En fonction du problème physique traité,
les conditions aux limites sont différentes et leur compatibilité
avec les modèles numériques associés à un impact
direct sur la convergence et le réalisme des résultats des
simulations numériques. Plusieurs types de conditions aux limites sont
proposés en CFD.
I.6.1. Condition de pression à l'entrée
Ce type de condition aux limites est employé
lorsqu'on veut imposer une pression à l'entrée du volume de
contrôle à étudier. Cette condition est valable aussi bien
en écoulement compressible qu'en écoulement incompressible, elle
est utilisable lorsqu'on connaît la pression à l'entrée et
qu'on recherche la vitesse de l'écoulement correspondante. La pression
totale imposée s'exprime, en écoulement incompressible, par la
relation suivante:
1
Pt = Pp + 2pv2
(I.36)
En écoulement compressible cette expression
devient :
|
Po = Pp + (1 + ' - 1
2 M2)
|
y y-1
|
(I.37)
|
Avec :
Pt : Pression totale Ps :
Pression statique
ã : Rapport des chaleurs
spécifiques (Cp/Cv)
M : Nombre de Mach
I.6.2. Condition de vitesse à l'entrée
Cette condition aux limites sert à imposer une
vitesse d'entrée au volume de contrôle. Une fois la vitesse
fixée, on remonte aux autres grandeurs de l'écoulement. Cette
condition aux limites est utilisable en général dans les
écoulements supposés incompressibles. Pour des raisons
d'instabilités numériques il est déconseillé
d'appliquer la condition de vitesse à l'entrée dans le cas des
écoulements compressibles.
I.6.3. Condition de débit massique à
l'entrée
A l'inverse de la condition de pression à
l'entrée, cette condition aux limites consiste à fixer le
débit de l'écoulement à l'entrée pendant que la
pression totale de l'écoulement varie. Dans plusieurs applications, la
condition de pression à l'entrée rend la convergence des calculs
plus lente, il est conseillé dans ces cas d'appliquer la condition de
débit massique à l'entrée. Pour les calculs des
écoulements incompressibles, il n'est pas nécessaire d'imposer le
débit massique à l'entrée. La vitesse de
l'écoulement impose la valeur du débit massique du fait que la
masse volumique du fluide est constante.
I.6.4. Condition de pression à la sortie
Permet d'imposer une valeur de la pression statique
à la sortie du volume de contrôle. La valeur de la pression
statique ne peut être imposée que lorsque l'écoulement est
subsonique.
Le processus de convergence devient plus rapide lorsque
la valeur de la pression à la sortie imposée est proche de la
réalité.
I.6.5. Condition de parois
Cette condition aux frontières permet de
spécifier les parois du volume de contrôle.
Les parois peuvent être déclarées
fixes ou en mouvement relatif à l'exemple des rotors de machines
rotodynamiques.
Pour des écoulements visqueux, la condition de
non glissement est associée à cette condition aux limites. La
contrainte de cisaillement associée à la présence des
parois dans le domaine de calcul en régime d'écoulement laminaire
est donnée par la relation suivante :
I.7. Conclusion
Dans ce chapitre, nous avons présenté
quelques notions de base en mécanique des Fluides, et un rappel sur les
principes généraux de la couche limite, la dynamique des
différentes structures de la couche limite laminaire et turbulente et la
physique de décollement de la couche limite. En fin une
modélisation de la turbulence et quelques définitions de ces
model les plus utilisés dans la simulation numérique.

CHAPITRE
II
SIMULATION NUMERIQUE
&
MAILLAGE HYBRIDE
SOMMAIRE PAGE
II.1. Introduction 22
II.2. Processus de simulation numérique
22
II.3. Les Logiciels de Simulation Numérique
31
II.4. Maillage hybride 33
II.5. Conclusions 37
II.1.Introduction
La CFD (Computational Fluid Dynamics) est simplement
le calcul numérique appliqué à la mécanique des
fluides. Cela consiste à résoudre dans une
géométrie donnée les équations fondamentales de la
mécanique des fluides, que l'on peut éventuellement coupler aux
équations de transfert thermique ou de réaction chimique.
Historiquement, la CFD a commencé à se développer en
génie mécanique, pour étudier les écoulements
autour d'un objet afin de mieux le profiler (ailes d'avions, automobiles). Dans
le domaine du génie chimique, les problèmes sont, en
général, beaucoup plus complexes de par, en particulier, le
caractère multiphasique des écoulements, les réactions
chimiques et le comportement rhéologique des fluides.
Le résultat d'une opération unitaire est
souvent sous-tendu par la qualité des écoulements qui sont
produits dans l'appareil, car l'intensité des transferts en
dépend fortement (mise en contact d'espèces, de fluides, de
phases, d'internes, de parois). La connaissance des écoulements dans une
installation, et des grandeurs locales ou globales que l'on peut en
déduire (champs de concentration, de dissipation
énergétique, de température, puissance dissipée,
perte de charge, distribution de temps de séjour, etc.), aide alors
l'ingénieur de procédé à mieux définir la
géométrie de son équipement et à régler avec
pertinence ses paramètres opératoires.
II.2.Processus de simulation numérique
Les développements et les progrès
réalisés au cours des deux dernières décennies ont
conduit à l'apparition d'une méthodologie qui est devenue
standard. Comme pour tout système complexe, la clef de la maîtrise
réside dans l'identification et la modularisation des tâches.
Actuellement, la méthodologie standard découpe le processus de
simulation en quatre tâches distinctes, qui sont :
· Modélisation
Géométrique
· Maillage
· Résolution
· Analyse et Visualisation
La Figure (II.1) montre comment ces quatre modules
s'intègrent dans le processus de simulation numérique, et comment
ils communiquent entre eux. La transmission d'information, c'est-à-dire
la façon dont les objets sont échangés entre modules, se
fait sous la forme de fichiers informatiques. [13]

MODELEUR
GEOMETRIQUE
GENERATEUR
DE MAILLE
RESOLUTEUR
D'EQUATIONS
ANALYSE ET
VISUALISATION
Géométrie
Maillage
Solution
Figure (II.1) : Méthodologie de résolution
d'un problème numérique
II.2.1. Modélisation Géométrique
Le rôle du modeleur géométrique
est de traduire la géométrie des objets, en deux ou trois
dimensions sous la forme d'une représentation informatique. Les
entités constituant la description complète de la
géométrie sont des formes élémentaires
assemblées pour former la géométrie. La
modélisation solide appelée CSG (Constructive Solid Geometry) est
basée sur des volumes élémentaires tels que cubes,
sphères, cônes, et autres volumes géométriques de
base. Le modèle final est obtenu en appliquant des opérations
booléennes sur ces volumes élémentaires. Les
opérations sont l'union, l'intersection, la soustraction, etc. La
modélisation B-rep (Boundary Représentation) utilise, comme son
nom l'indique, les frontières pour construire le modèle. Cette
modélisation définit un volume à partir des surfaces qui
le bornent. Les techniques de représentation de ces surfaces sont issues
des développements mathématiques sur les fonctions splinaires, de
Bézier et plus récement les NURBS. Ces surfaces sont
ellesmêmes délimitées par des courbes qui sont
définies par des points.
Un modeleur géométrique produit un
fichier qui contient une représentation informatique de la
géométrie. Le format est souvent propre au modeleur
géométrique, même si des efforts sont faits pour arriver
à une norme (telles que les normes IGES ou STEP). Souvent, le format
utilise la représentation la plus simple soit une facettisation plane
obtenue par des triangles
II.2.2. Maillage
Un maillage est une partition de l'espace ou d'un
domaine en cellules appelées éléments. Le mailleur prend
en entrée la géométrie, c'est-à-dire le fichier
produit par le modeleur géométrique, et fournit en sortie un
maillage. Ceci comprend une information
géométrique sur les sous-volumes et une
information topologique sur la connectivité entre les
éléments. Les maillages non structurés sont sous la forme
d'une liste d'éléments interconnectés. Les formes sont
souvent des triangles ou des quadrilatères en deux dimensions, et des
tétraèdres, des cubes ou des hexaèdres en trois
dimensions. La connectivité d'un élément est la liste de
ses voisins. Un élément possède un voisin par arête
ou par face, selon que le maillage est bi- ou tridimensionnel. Dans le cas des
maillages structurés, la connectivité est par définition
implicite, et donc le maillage se résume à une simple liste de
noeuds.
II.2.2.1. Génération de maillage
La génération du maillage (2D ou 3D) est
une phase très importante dans une analyse CFD, vu l'influence de ses
paramètres sur la solution calculée.
La technique de génération de maillage
peut être résumée sous la forme suivante :
La géométrie doit être
préparée au préalable, avec la définition de tous
les composants de la géométrie fuselage, aile, extrados,
intrados...etc., sous forme de données numériques, fichier CAD
pré-établi ou plutôt sous forme de fichier maillage qu'on
peut importer sous ICEM CFD.
La géométrie qui représente les
différents domaines fluides est décomposée en sous
domaines « maillables ».
Maillages des sous domaines fluides.
La réduction du temps nécessaire à
la génération du maillage est un critère de bonne
maîtrise de l'utilisation des outils CFD.
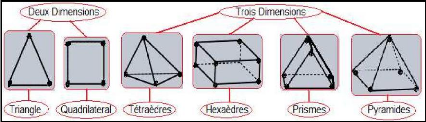
Figure (II.2) : Exemples de mailles utilisées en
Volumes Finis.
II.2.2.2. Composants du maillage
Les composants sont définis dans un processeur :
Cell = volume de contrôle divisant la géométrie
Le domaine de calcul est défini par un maillage
qui représente le fluide et les faces solides qui
interviennent.
Face = frontière d'une cell
Edge = frontière d'une face
Node = point de maillage
Zone = groupe de noeuds, face et/ou cell
Les conditions limites sont assignées aux faces
zones.
Les d onnées des matériaux et les termes
sources sont assignés aux cell zones.
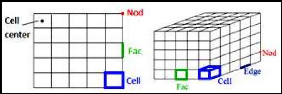
Figure (II.3) : Composant d'un maillage.
II.2.2.3. Choix du type de maillage
> Maillage structuré (quadra/hexa)
Il est beaucoup plus facile de le générer
en utilisant une géométrie multi bloc. Cette technique consiste
à diviser les domaines de calcul en plusieurs compartiments
de
mailler séparément.
formes géométriques simplifiées et
de les
Les avantages
· Economiq
ue en nombre d'éléments, présente
un nombre inférieur de mailles par rapport à un maillage non
structuré équivalent.
·
Réduit les risques d'erreurs numériques
dues à la diffusion numérique si l'écoulement est
aligné avec le maillage.
Ses inconvénients
· Difficile à générer dans le
cas d'une géométrie complexe.
·
Difficile d'obtenir une bonne qualité de maillage
pour certaines géométries complexes.
·
Dans la majorité des cas, la division du domaine
de calcul est nécessaire pour faciliter sa
génération.
> Maillage non structuré
(tri/tétra.)
Les éléments de ce type de maillage sont
générés arbitrairement sans aucune contrainte quant
à leur disposition.
Ses avantages
· Peut être généré sur
une géométrie complexe tout en gardant une bonne qualité
des éléments.
· Les algorithmes de génération de ce
type de maillage (tri/tétra) sont très automatisés
d'où un gain de calcul énorme.
Ses inconvénients
· Très gourmand en nombre de mailles
comparativement au maillage structuré.
· Engendre des erreurs numériques (diffusion
numérique) qui peuvent être plus importantes si l'on compare avec
le maillage structuré.
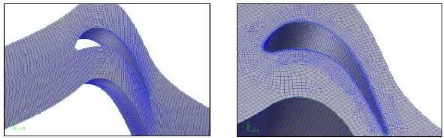
Figure (II.4). Exemple de maillage structuré et
non structuré autours d'un profil. [14]
> Maillage hybride
Maillage généré par un
mélange d'éléments de différents types,
triangulaires ou quadrilatéraux en 2D, tétraédriques,
prismatiques, ou pyramidaux en 3D.
Ses avantages
Combine les avantages du maillage structuré et
ceux du maillage non structuré en réduisant les erreurs dues
à la diffusion numérique.
Ses inconvénients
Ce type de maillage demeure encore difficile à
générer notamment dans les endroits de liaison entre le maillage
structuré et le maillage non structuré
II.2.2.4. Techniques générales de
génération du maillage
Pratiquement, il n'existe pas de règle
précise pour la création d'un maillage valable, cependant il
existe différentes approches qui permettent d'obtenir une grille
acceptable. Nous pouvons résumer ces règles ainsi :
· Maintenir une bonne qualité des
éléments.
· Assurer une bonne résolution dans les
régions à fort gradient.
· Assurer un bon Lissage dans les zones de
transition entre les parties à maillage fin et les parties à
maillage grossier.
· Minimiser le nombre Total des
éléments (temps de calcul raisonnable).
II.2.2.5. Qualité d'un maillage
La génération d'une très bonne
qualité de maillage est essentielle pour l'obtention d'un
résultat de calcul précis, robuste et signifiant.
Une bonne qualité de maillage repose sur les
éléments suivants:
· Minimisation des éléments
présentant des distorsions (skewness).
· Une bonne résolution dans les
régions présentant un fort gradient (couches limites, ondes de
choc ...etc).
Enfin, la qualité de maillage à un
sérieux impact sur la convergence, la précision de la solution et
surtout sur le temps de calcul.
> Distorsion
Une bonne qualité de maillage est synonyme
d'absence de grandes distorsions d'éléments (Bon
skewness).
Le facteur de distorsion Fd (skewness) se calcule de
deux façons différentes :
1. Calcul basé sur le volume
équilatéral :
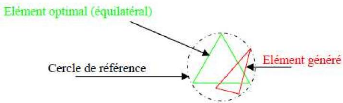
Figure (II.5) : La distorsion.
Fd =
Tai//ee'te'mentoptimal -
Tailiee'le'mentge'ne're'
Taillee'we'mentoptimal (II.
1)
= 1.2 (II. 3)
?K)
?xi+1
Applicable uniquement pour les éléments
triangulaires ou tétraédriques 2. Calcul basé sur la
déviation angulaire :
|
t = ~~ €Gmax - 90
90 , 90 - 8min
90 (II. 2)
|
|
Figure (II.6) : Déviation angulaire. Applicable
pour tout type d'élément.
· Notons que les grandes valeurs du facteur de
distorsion induisent des erreurs de calcul et ralentissent
considérablement le processus de convergence.
· Quelques distorsions peuvent être
tolérées si elles sont situées dans des régions
à faible gradient.
Ce tableau illustre la variation de la qualité
des éléments de maillage en fonction de la valeur du coefficient
de distorsion Fd :
Tableau (II.1) : La variation de la qualité de
maillage
Fd
|
0-0.25
|
0.25-0.50
|
0.50-0.80
|
0.80-0.95
|
0.95-0.99
|
0.99-1.00
|
Qualité
|
excellent
|
Bon
|
Acceptable
|
Pauvre
|
Très Pauvre
|
Mauvais
|
|
· La valeur maximale du "skewness"
tolérée pour un maillage volumique doit être
inférieure à 0.90.
· La valeur maximale du "skewness"
tolérée pour un maillage surfacique structuré ou non,
hexaédrique ou tétraédrique doit être
inférieure à 0.75.
> Lissage
Le changement dans la taille des
éléments de maillage d'une zone maillée à une autre
doit être graduel, la variation de la taille des éléments
de deux zones adjacentes ne doit pas dépasser 20%.
> Nombre total d'éléments
Un nombre important d'éléments de
maillage permet sans doute d'améliorer la précision des calculs,
mais pénalise les ressources informatiques en terme de mémoire et
alourdit le système. Par voix de conséquence, un compromis entre
précision et temps de calcul s'impose. Des techniques existent pour
économiser un certain nombre d'éléments :
· Utilisation des maillages non uniformes, en
concentrant la bonne qualité du maillage uniquement dans les zones
où c'est nécessaire.
· Utilisation de la fonction adaptation de maillage
pour raffiner uniquement sur des zones bien précises.
· Utilisation des éléments de
maillage hexaédriques dans les zones adéquates.
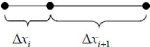
II.2.2.6. Génération de maillage couche
limite
La notion de résolution concerne plus
particulièrement les zones qui présentent un fort gradient, ainsi
une bonne résolution permet de mieux décrire les
phénomènes physiques qui existent dans ces zones telles que les
ondes de choc, ou les phénomènes lies a la couche
limite.
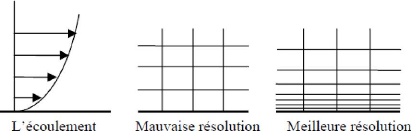
Figure (II.7) : Maillage couche limite.
II.2.2.7. Indépendance de la solution du
maillage
Dans une modélisation CFD, la solution doit
être indépendante de la densité du maillage pour être
sûr du réalisme de la solution que donne le solveur après
convergence.
Figure (II.8) : Indépendance de la solution du
maillage.
II.2.3. Resolution
Au cours de cette étape, les équations
différentielles décrivant le phénomène physique
sont discrétisées et transformées en un système
d'équations algébriques. Les techniques utilisées sont les
différences finies, les volumes finis ou bien les éléments
finis, et permettent d'exprimer les variables des problèmes sur le
support géométrique que constitue le maillage. Des conditions aux
frontières et ou des conditions initiales viennent compléter ces
équations, rendant la solution du système unique. Le
résoluteur prend donc en entrée un maillage et avec le
schéma de discrétisation retenu, construit le système
d'équation. La solution de système algébrique,
c'est-à-dire la liste des valeurs, Pour chaque point du maillage, de la
ou les variables est obtenue par différents schémas
itératifs.
II.2.4. Analyse et Visualisation
Les résultats fournis par la résolution
des équations constituent une
quantitéphénoménale de données qui dans
leur forme brute défient toute analyse par un
humain. Les outils d'analyse permettent d'extraire
les informations utiles pour fins d'analyse et de compréhension.
Utilisant des procédures de post-traitement, les caractéristiques
globales qui sont l'objectif final de la simulation numérique, sont
calculées à partir des données ponctuelles de la solution.
Par exemple, lors de l'étude d'une aile d'avion, la traînée
et la portance font partie de ces caractéristiques obtenues par
l'intégration numérique des valeurs surfaciques.
La visualisation regroupent l'ensemble des techniques
qui permettent de représenter les quantités physiques (telles les
vitesses, les températures etc...) sous une forme graphique pour
faciliter la compréhension des résultats.
II.3. Les Logiciels de Simulation Numérique
Le développement du calcul scientifique a
entraîné le développement de nouveaux algorithmes, de
nouvelles méthodes de calcul, d'interfaces plus conviviales et plus
puissantes. Combinés aux progrès très rapide du
matériel informatique, ces développements assurent la progression
des performances des logiciels et par conséquent la réduction du
temps de simulation numérique.
Dans notre travail on utilise le logiciel de simulation
ANSYS 13; (ICEM CFD) pour généré le maillage
tétra/prisme et (FLUENT) pour la simulation d'écoulement
fluide.
II.3.1. ICEM CFD
ICEM est un mailleur commercial ouvert (par
opposition à limité à seul code de calcul. Il peut lire
des géométries venant des logiciels de CAO classiques :
SOLIDWORKS, CATIA, etc., ou générer lui-même ses
géométries. ICEM sauvegarde les maillages soit aux formats des
codes classiques de mécanique des fluides (Fluent, CFX, ...) et de
mécanique du solide (Nastran, Patran, ...), soit dans des formats
définis par l'utilisateur lui-même par le biais de routines en
Fortran ou C.
Par rapport à la concurrence, ICEM est un
mailleur très puissant en termes de génération des
géométries complexes et d'optimisation de maillage. La contre
partie de cette puissance vient de la complexité de l'outil (il existe
de multiples options) et d'une convivialité perfectible.
ICEM génère des maillages 2D ou 3D
structurés, non structurés et hybride à base
d'hexaédriques, prismatiques, tétraédriques. Permet de
mailler des domaines de géométrie d'un problème de CFD
(Computational Fluid Dynamics). Il génère des fichiers *.msh pour
Fluent. Ce dernier est un logiciel qui est basé sur l'utilisation de la
méthode des volumes finis des problèmes de mécanique des
fluides et de transferts thermiques.
En résumé, ICEM est pour la
mécanique des fluides un des mailleurs les plus performants mais il
nécessite un investissement en temps conséquent.
ICEM-CFD regroupe trois fonctions : définition
de la géométrie du problème (construction si la
géométrie est simple ou bien import de la géométrie
CAO), le maillage et sa vérification, la définition des
frontières (Types de conditions aux limites) et définitions des
domaines de calculs.
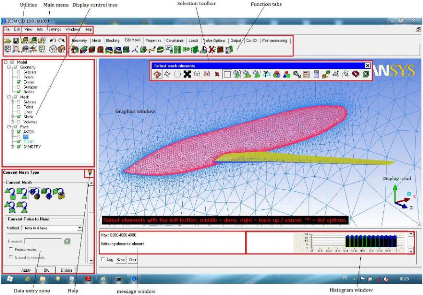
Figure (II.9) : Interface d'ICEM CFD
II.3.2. Le Solveur Fluent
Fluent est un solveur qui utilise des maillages
non-structurés 2D ou 3D (avec la méthode des volumes finis). Ces
maillages sont : soit des maillages triangulaires (tétraédriques
en 3D), soit des maillages structurés interprétés en
format nonstructurés comme des rectangles (hexaèdres), pour une
simulation de tous les écoulements fluides, compressibles ou
incompressibles, impliquant des phénomènes physiques complexes
tels que la turbulence, le transfert thermique, les réactions chimiques,
les écoulements multiphasiques... et ce sur les géométries
complexes industrielles. Ce produit inclut également un véritable
environnement CAO et un mailleur paramétrique de dernière
génération, permettant de mettre en place
rapidement les modèles numériques ou de
s'intégrer aux outils de conception
déjàexistants (SOLIDWORKS, CATIA, I-DEAS,
Pro/E...)
Le maillage est lu dans fluent comme un nouveau cas
et il est possible de l'améliorer : lissage (grid smoothing) ou
permutation des arêtes (grid swapping). Pour débuter une
simulation, il faut passer dans chaque menu déroulant de Fluent (en
commençant par la gauche) pour initialiser les différents
paramètres de la simulation (modèle de turbulence, condition aux
limites, etc.).
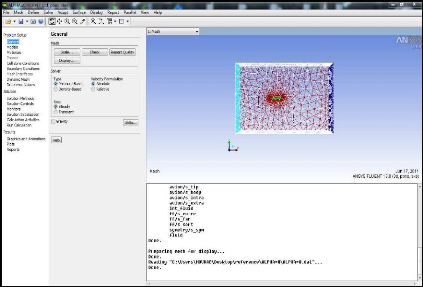
Figure (II.10) : Interface FLUENT 13.
II.4. Maillage hybride
II.4.1. Position du problème
Généralement on dit que, aucune des
techniques de génération automatique, telles qu'elles existent
aujourd'hui, ne peut seule respecter l'ensemble des critères
imposés à un maillage. Ainsi un bon maillage pour un programme
qui résout les équations de type Euler peut être de
mauvaise qualité pour un programme traitant les équations de type
Navier- Stokes. Dans le premier cas (Euler), il est fondamental d'avoir des
éléments qui ne soient pas aplatis alors que dans le second cas,
on demande un élancement important des éléments dans La
direction de L'écoulement.
La technique des maillages hybrides trouve sa
justification et sa motivation dans La tentative de résoudre cette
contrainte. Dans cette partie nous faisons d'abord un historique des maillages
hybrides, ensuite le processus de génération de maillage hybride
prismatique proche parois et ses déférentes lois
correspondantes.
II.4.2. Historique des maillages hybrides
Depuis la fin des années 80 les maillages
hybrides ont commencé à attirer l'attention des chercheurs comme
alternative à l'utilisation de maillages non structurés dans tout
le domaine. Dans l'approche non-structurée pure et pour avoir une
certaine
précision numérique, il faut utiliser
beaucoup de tétraèdres dans la région de la couche limite,
augmentant ainsi la probabilité d'avoir des éléments de
pauvre qualité connus sous le nom de Slivers à l'origine de
certaines imprécisions et singularités numériques. On a
don un impact direct négatif sur la précision, le temps de
calcul, et sur la robustesse des programmes informatiques dont le maillage est
le support. Les premiers résultats concrets dans cette nouvelle approche
de maillages hybrides datent de 1993 avec Nakahashi (1993) [15], Kallinderis et
Ward (1993) [16]. Marcum (1995) [17], par l'exemple que nous illustrons
ci-dessous montre que l'utilisation de quadrilatères à la place
de triangles au niveau de la couche limite, a pour effet à
précision numérique égale de réduire le nombre
d'éléments, donc le temps de calcul. Kallinderis (1995), montre
l'avantage de l'utilisation de maillage structurés par rapport aux non
structurés pour mieux capter la physique du problème dans la
couche limite, et réduire par la même occasion les temps de
calculs.
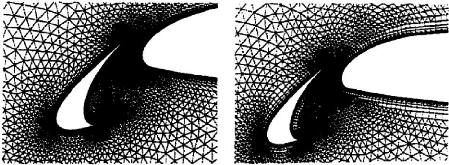
Figure (II.11): Exemple de Marcum (1995) faisant
passer le nombre de triangle de
11544 au niveau de la couche limite
(maillage non-structuré pur, figure à gauche) à
5772
quadrilatères (maillage hybride, figure à droite).
Pour des raisons d'espace mémoire, de vitesse
d'exécution, et le désir d'avoir des éléments
étirés à grand coefficient de forme, ils ont
proposé l'utilisation d'éléments prismatiques
structurés au niveau de la couche limite pour former le maillage, zone
ou les effets visqueux sont dominants, et d'éléments
tétraédriques à l'extérieur de la couche limite ou
l'écoulement est non visqueux.
II.4.3. Processus de génération de maillage
hybride (tétra/prisme)
II.4.3.1. Lois de croissance (Growth Law)
Détermine la hauteur totale des couches
données, la hauteur de la première couche et le facteur de
progression pour les trois types suivants : [18]
> Linéaire
La hauteur de la couche particulière d'un prisme
est définie par :
H = h[1 + (n - 13(r - 13] (II. 4)
Avec:
h=hauteur initiale (initial height)
r=facteur de progression (height ratio)
n=nombre des couches (layer number)
La hauteur totale à la couche n est :
[(n - 13(r - 13 + 2]
ho = nh (II. 5)
2
> Exponentiel
La hauteur de la couche particulière d'un prisme
est définie par :
H = h * r(y-1) (II. 6)
La hauteur totale à la couche n est :
(1 - ri')
ho = h (1 - r) (II. 7)
> WB-Exponential
C'est la loi de croissance exponentielle est
définie dans l'ANSYS Workbench. La hauteur de la couche
particulière d'un prisme est définie par :
H = h * exp[(~_13(1_~3] (II. 83
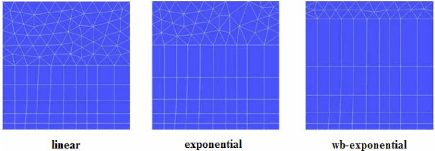
Figure (II.12) : Croissances des prismes. >
La hauteur initiale (Initial height)
Est la hauteur d'élément de la
première couche.
Si la hauteur initiale est placée à 0, la
maille d'entrée elle sera calculée automatiquement
> Facteur de progression (Height ratio)
Est le facteur de progression de la première
couche. Ce rapport sera multiplié par la taille d'élément
de la couche précédente pour définir la taille de la
prochaine couche.
> Nombres des couches de prisme (Number of layers)
Est le nombre de couches à développer.
> La hauteur totale (Total height)
Est la hauteur totale de toutes les couches de
prisme.
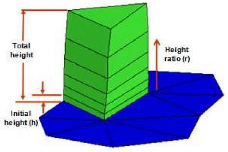
Figure (II.13) : Hauteur des prismes.
II.5. Conclusions
Ce chapitre nous a permis de nous familiariser avec
les techniques générales de la simulation numérique et
comprendre l'outil de génération de maillage et solution le
très utilisées en aérodynamique. La méthode qui
nous intéresse dans notre travail est celle de type hybride.
Dans l'utilisation d'un maillage hybride, un bon
compromis entre les critères robustesse offerte, résolution et
précision souhaité et coûts de calculs induits doit
être trouvé. D'une manière générale,
approximativement 50% des noeuds de maillage se trouveront dans les couches
limites, essentiellement composées d'hexaèdres et/ou des prismes,
et 50% dans le restant du domaine de calcul, essentiellement composé de
tétraèdres. Le choix final de discrétisation devra
refléter cette situation.

CHAPITRE
III GENERATION DE
MAILLAGE HYBRIDE &
SOLUTION SUR
ARA M100
SOMMAIRE PAGE
III.1. Introduction 38
III.2. Définition de la géométrie
ARA M100 Aile-Fuselage 38
III.3. Génération du maillage (ICEM CFD 13)
40
III.4. Solution par Fluent 47
III.5. Conclusion 58
III.1. Introduction
Dans cette section, on présente les
étapes de génération de maillage hybride
(tétra/prisme) sur la configuration Ail-Fuselage ARA M100, ensuite les
étapes dans fluent par le logiciel ANSYS 13.
III.2. Définition de la géométrie
ARA M100 Aile-Fuselage
La configuration aile-fuselage du model ARA M100
c'est une géométrie d'un modèle de soufflerie
examiné dans United Kingdom's Aircraft Research Association. L'aile est
montée approximativement centralement sur l'axe de fuselage.
[19]
La géométrie contienne des ensembles des
points (x, y, z) définissent cette
configuration.
Avec :
· X : axe orienté dans la direction
d'écoulement, positif en aval.
· Y : axe orienté verticalement, positif
vers le haut.
· Z : axe orienté dans la direction de
l'envergure, positif à l'extérieur.
L'origine des axes est située au nez du
fuselage.
III.2.1. Plan de symétrie
C'est un plan 2D définissent le fuselage est
donnée par un ensemble de 38 points dans le plan xy de
l'avion.
III.2.2. Aile
La surface de l'extrados et l'intrados
représenté par des 22 courbes suivant la direction de l'envergure
apartir de l'emplanture jusqu'à l'extrémité de l'aile
(tip), Chacune de ces courbes est définie par un ensemble de 52
points.
III.2.3. Extrémité d'aile (Tip)
L'extrémité de l'aile (Tip) est
représentée par 9 courbes, chacune d'elles est définie par
un ensemble de 51 points.
III.2.4. Dimensions de la géométrie ARA
M100
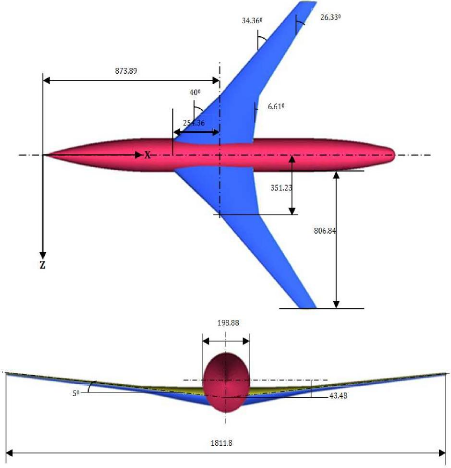
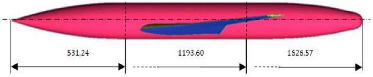
Figure (III.1) : Dimensions d'ARA M100
III.3. Génération du maillage (ICEM CFD
13)
La génération du maillage est une phase
très importante dans le cadre d'une modélisation CFD, compte tenu
de son influence sur la solution calculée. La technique de
génération de maillage peut être résumée par
les étapes suivantes :
· La géométrie doit être
préparée au préalable, avec la définition de tous
les composants sous forme, fichier TIN ou sous forme de fichier maillage qu'on
peut importer sous ICEMCFD.
· La géométrie qui représente
les différents domaines fluides est décomposée en
sous
domaines «maillables».
· Maillage des sous domaines fluides.
Le maillage qui peut être utilisé sur
ARA M100 est de type hybride (tetra/prisme). La forme géométrique
des cellules de discrétisation sont triangulaires et prismatiques. Cette
variété d'éléments assure une certaine
flexibilité lors de la génération du maillage et permet
ainsi de choisir l'élément adéquat pour épouser au
mieux la forme géométrique du problème.
III.3.1. Génération de maillage
tétraédrique
III.3.1.1. Importation de la géométrie
et nettoyage de la CAO
Dans ce cas, on a recours à l'importation de
la géométrie. Il est conseiller d'importer des fichiers sous
format TETIN (*.tin). Souvent il est indispensable de nettoyer la
géométrie.
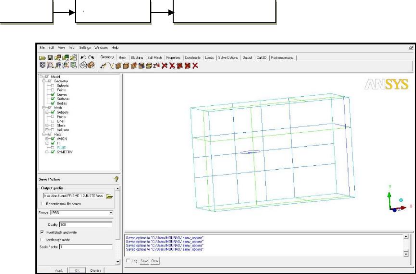
File
Geometry
Open Geometry
Figure (III.2) : Importation de la
géométrie et nettoyage de la CAO
III.3.1.2. Création des familles
Dans cette étape on va subdiviser
l'élément importé (la géométrie et le
Domaine) en plusieurs sous éléments de point de vue surfaces et
courbes pour chacun, avec une association des noms de familles pour
éviter le désordonnément.
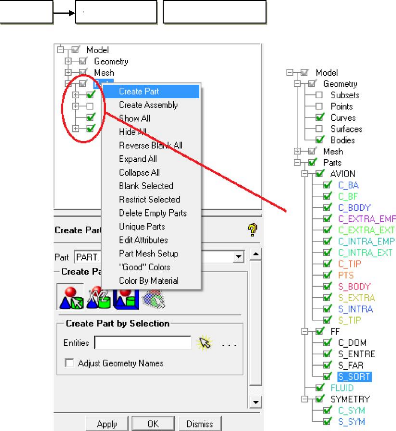
Parts
Create Parts
Create Assembly
Figure (III.3) : Création des familles
III.3.1.3. Définition du domaine « FLUID
»
Lors de la création des parties, il est
obligatoire de créer un point qui n'appartient pas à la
géométrie elle-même, mais qui est contenu dans le domaine
de calcul. Ce point va permettre de déterminer le domaine à
maillé (far-field).

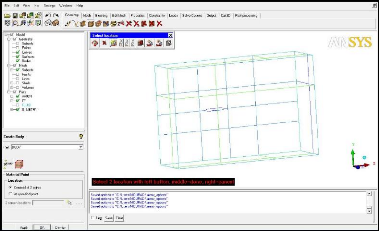
Figure (III.4) : Création d'un point
matériel
III.3.1.4. Paramètres de maillage
Les paramètres de maillage sont choisis de telle
manière à avoir un maillage voulu (raffiné ou gros). La
précision de la solution dépend de la qualité du maillage
obtenu.
Tableau (III.1) : Paramètres de maillage
tétraédrique
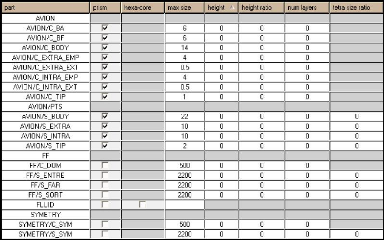
III.3.1.5. Choix et génération de type
de maillage
Mesh
|
|
Compute Mesh
|
|
Tetra/mixed
|
|
Compute
|
|
Cette étape consiste à choisir le type de
maillage à générer
(Tétraédrique).
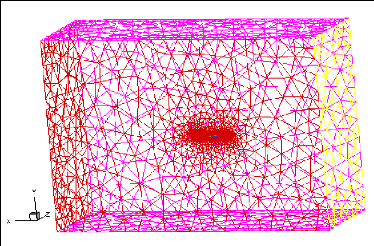
Figure (III.5) : Affichage de maillage (Tecplot)
III.3.1.6. Vérification de maillage
Pour dire que notre maillage est faisable, il faut
vérifier les conditions suivantes :
· Si le domaine n'est pas ouvert dans quelque part
de la géométrie.
· S'il n'y a pas d'écrasement des
éléments.
· Si le maillage est raffiné ou non dans
chaque partie de la géométrie selon les besoins.
III.3.2. Génération des couches de prisme
sur ARA M100
Après avoir le maillage tétra, on peut
générer les couches de prisme sur la géométrie pour
simulé mieux l'écoulement dans la couche limite sur toute la
géométrie, pour cela on a suivi les étapes suivantes
:
III.3.2.1. Paramètres général
des prismes

Mesh
Global Mesh
Prism Meshing Parameters
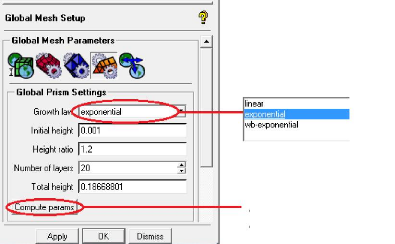
Compute parameters pour calculer la hauteur
totale des couches de prisme
Figure (III.6) : Paramètres de la hauteur des
prismes Tableau (III.2) : Valeurs des hauteurs
Parameters
|
Paramètres
|
Description
|
Valeurs
|
Initial height
|
Hauteur initiale
|
Hauteur initiale de la première
couche des prismes.
|
0.001
mm
|
Height ratio
|
Facteur de progression
|
Ce rapport sera multiplié par la taille
d'élément de la couche précédente pour
définir la taille de la prochaine couche.
|
1.2 mm
|
Numbre of layers
|
Nombre de couches
|
Est le nombre de couches à
développer.
|
20
couches
|
Total height
|
Hauteur totale
|
Est la hauteur totale de toutes les couches.
|
0.1866mm
|
|
III.3.2.2. Paramètres de prismes sur chaque
partie de la géométrie
· sélectionner seulement les parties qui
contiennent les couches de prisme.
· Remplir les valeurs des hauteurs
(Height), facteur de progression (Height Ratio)
et nombre de couches (Num Layers) de
toutes les parties contiennent les couches de prisme.
· Mettant zéro dans les autres
parties.
Tableau (III.3) : Paramètres de maillage
prismatique
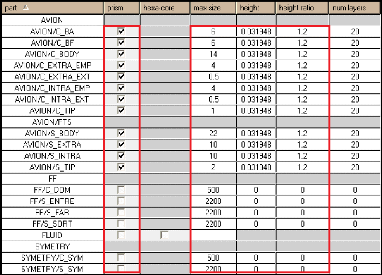
III.3.2.3. Lancement de maillage prismatique
Séléctionner create prism
layers pour générer les couches de prisme sur le
maillage tetra.
Mesh
|
|
|
|
|
|
|
|
|
|
|
|
Compute Mesh
|
|
|
|
Volume Mesh
|
|
|
|
|
|
|
|
|
|
|
|
|
|

Enfin, Pour avoir les couches de prisme, on clic sur
Compute pour commencer à générer le maillage.
Mesh
|
|
|
|
|
|
|
|
|
|
Compute
|
|
|
|
Compute Mesh
|
|
|
|
Prism Mesh
|
|
|
|
|
|
|
|

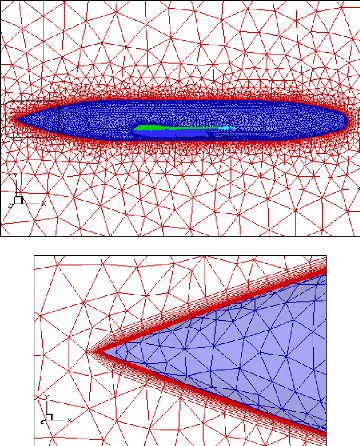
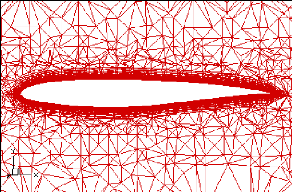
Figure (III.7) : Génération de maillage
prismatique (Tecplot)
Paramètres de maillage obtenu
Total elements 908699
Total nodes 354044
Min -4000 -4000 0
Max 8000 4000 4000
|
|
III.3.3. Exportation vers Fluent 13
Pour enregistrer le maillage sous format (*.msh), il
faut spécifier le solveur. Dans notre cas, nous choisissons :
Fluent_V6.
Tout est ainsi défini (géométrie,
maillage). Il ne reste plus qu'à sauver l'ensemble au format
Fluent.
Le fichier d'enregistrement se retrouve dans le
répertoire choisi.
III.4. Solution par Fluent
Fluent est un solveur qui utilise des maillages
non-structurés 2D ou 3D (avec la méthode des volumes finis). Ces
maillages sont : soit des maillages triangulaires (tétraédriques
en 3D), soit des maillages structurés interprétés en
format nonstructurés comme des rectangles (hexaèdres), pour une
simulation de tous les écoulements fluides, compressibles ou
incompressibles, impliquant des phénomènes physiques complexes
tels que la turbulence, le transfert thermique, les réactions chimiques,
les écoulements multiphasiques... et ce sur les géométries
complexes industrielles. Ce produit inclut également un véritable
environnement CAO et un mailleur paramétrique de dernière
génération, permettant de mettre en place rapidement les
modèles numériques ou de s'intégrer aux outils de
conception déjà existants.
III.4.1. Principales étapes de simulation sous
Fluent
Cette partie fournie une introduction à
FLUENT, une explication de ses aptitudes, et des instructions afin de citer les
paramètres du solveur. Il explicite les étapes nécessaires
pour réussir une simulation d'un problème en mécanique des
fluides.

File
Read
Mesh...
III.4.1.1. Importation du fichier (*.msh)
Pour commencer la simulation il faut importer le fichier
(*.msh) généré sous ICEM CFD.
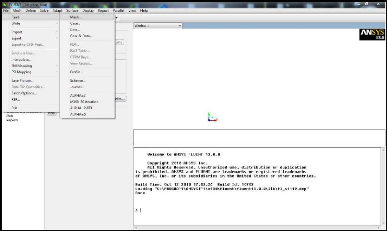
Figure (III.8) : Importation du maillage
III.4.1.2. Vérification du maillage
importé
Ceci permet de vérifier si le maillage
importé ne contient pas d'erreurs ou de volumes
négatifs.
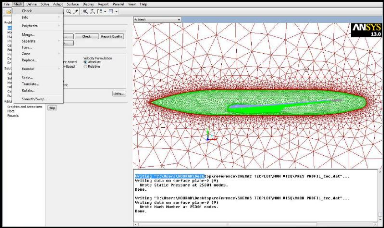
Figure (III.9) : Vérification du maillage sou
Fluent
III.4.1.3. Lissage du maillage (Smooth and Swap the
Grid)

Pour s'assurer de la qualité du maillage, il
est pratique de lisser le maillage, cliquez sur le bouton Smooth puis sur le
bouton Swap. Répétez jusqu'à ce que FLUENT affiche que
zéro faces sont swapped.
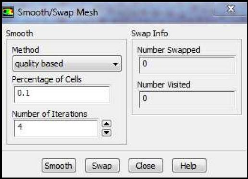
Figure (III.10) : Lissage du maillage
III.4.1.4. Vérification de
l'échelle


Mesh
Scale
Il faut toujours vérifier que les dimensions
affichées correspondent aux dimensions physiques du
problème.
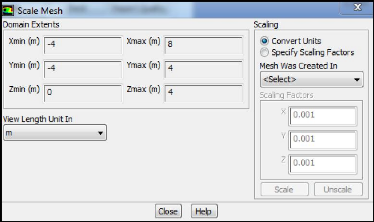
Figure (III.11) : Vérification des
unités
III.4.1.5. Choix du modèle de turbulence
Fluent propose différentes modélisations
de l'écoulement turbulent. Soit des écoulements non visqueux,
laminaires, turbulents ... etc.
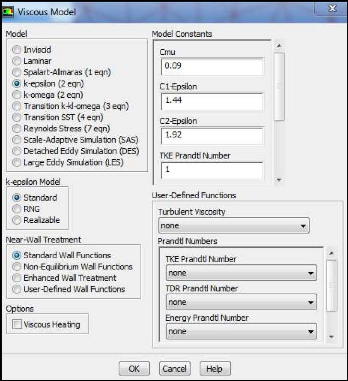
Figure (III.12) : Choix du modèle de
turbulence
Tableau (III.4) : Modèles de turbulence
[20]
Modèles
|
Avantages
|
Inconvénients
|
Spalart-Allmaras
|
Economique (1 equ). Bon pour les écoulements
moyennement complexes.
|
N'est pas largement testé.
|
STD k-?
|
Robuste, économique et relativement
précis.
|
Résultats médiocre pour des
écoulements complexes (fort gradient de pression, rotation et
swirl).
|
RNG k-?
|
Bon pour des écoulements moyennement complexes
(impact de jet, séparation d'écoulements, écoulements
secondaires...)
|
Limité par l'hypothèse de viscosité
turbulente isotrope.
|
Realizable k-?
|
Offre les mêmes avantages
que le RNG. Recommandé dans le cas des
turbomachines.
|
Limité par l'hypothèse de viscosité
turbulente isotrope.
|
Reynolds Stress Model (RSM)
|
Le modèle le plus complet Physiquement (transport
et l'anisotropie de la turbulence sont tenus en compte)
|
Requiert plus de temps CPU. Les équations de
quantité de mouvement et turbulence sont étroitement
liées.
|
SST et standard k-ù
|
Modèle le plus recommandé pour les
problèmes liés aux turbomachines, meilleur que le Realizable
k-?.
|
Nécessite une plus grande résolution du
maillage aux frontières (pas de aux murs).
|
|
III.4.1.6. Définition des
caractéristiques du fluide
Les caractéristiques du fluide sont
chargées à partir de la bibliothèque de données de
Fluent.
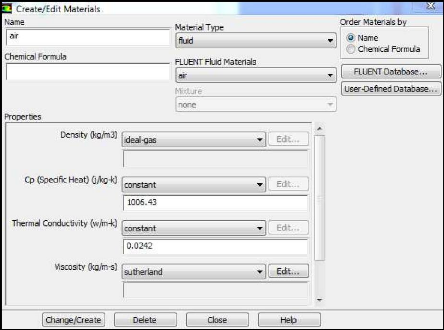
Figure (III.13) : Définition des
caractéristiques du fluide III.4.1.7. Conditions
opérationnel

Define Operating conditions
Avant de choisir les conditions aux limites, il faut
choisir d'abord la valeur de la pression de référence «
operating conditions ».
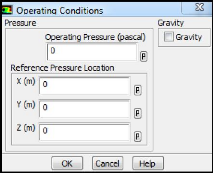
Figure (III.14) : Choix de la pression de
référence
En effet, Fluent effectue tous les calculs, avec une
pression appelée gauge pressure et ce afin d'éviter les erreurs
d'ordre numérique lors du calcul pour des écoulements à
faible nombre de mach. La relation liant la pression absolue à la «
gauge pressure » est donnée par :
Pabs = P0p + Pgauge
Fluent prend par défaut la valeur de la pression
atmosphérique comme operating pressure.
Ensuite, il faut choisir les conditions aux limites
:
III.4.1.8. Conditions aux limites
|
|
Boundary Conditions
|
Define
|
|
|
|
|
Ensuite, il faut fixer les valeurs des conditions aux
limites : Pour le domaine :
Pressure-far-field : Utilisée pour des
écoulements compressibles, quand le nombre de mach et l'angle
d'incidence sont connus.
· ff/s_entre : Ps = 101325 pa, M =0.8027, á
= 2.873°.
· ff/s_sort : Ps = 101325 pa, M =0.8027, á =
2.873°.
· ff/s_far : Ps = 101325 pa, M =0.8027, á =
2.873°.
· volume du domaine "fluide" : "fluid" (garder par
défaut).
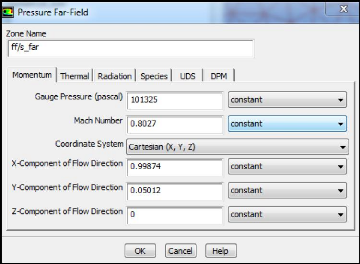
Figure (III.15) : Pressure-far-field pour tout le
domaine
Wall : est utilisé pour délimiter les
régions solides des régions fluides. En général on
utilise les propriétés d'une paroi lisse i-e Roughness Height = 0
et Roughness Constant = 0.5 (sur toute la géométrie ARA
M100).
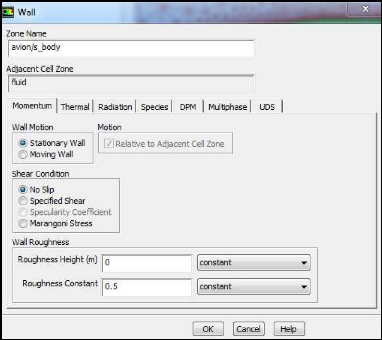
Figure (III.16) : Wall
Symétrie : Les gradients normaux et la vitesse
normale au plan de symétrie sont nuls.
Figure (III.17) : Symétrie
III.4.1.9. Choix des critères de
convergence
|
Solve
|
|
Monitors
|
|
Residual...
|
|
|
|
|

Il s'agit ici de choisir les critères qui doivent
être vérifiés pour que les calculs de la simulation
s'arrêtent.
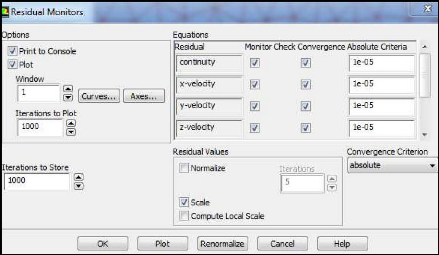
Figure (III.18) : Choix et affichage pendant les
calculs des critères de convergence
(residuals)
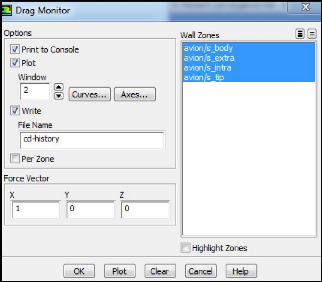
Figure (III.19) : Choix et affichage pendant les
calculs des critères de convergence
(Drag & Lift)
Pour afficher la convergence à l'écran
pendant les calculs sous forme d'un graphe, il faut activer l'option Plot. Il
est possible de désactiver certains critères d'arrêt de la
simulation en décochant la case de convergence.
Remarque importante
Les résidus sont calculés à
partir des corrections dans les variables ; pression, vitesse,
température... du problème entre la présente
itération et l'itération précédente. Dans la
plupart des cas, le critère de convergence par défaut dans FLUENT
(residual) est suffisant. La solution converge quand les résidus
atteignent 10-3. Toutefois, dans certains cas il faut pousser les
calculs à 10-4 voir 10-6. Il n'y a pas de
règle universelle ! Dans le cas des écoulements diphasiques, il
faut impérativement pousser la convergence à 10-4.
[18]
III.4.1.10. Initialisation des calculs

Il est conseillé dans nombreux cas
d'initialiser les calculs aux conditions de l'entrée. Toutefois s'il y a
un calcul qui a déjà convergé et que vous désirez
changer juste un paramètre (exp. Vitesse d'entrée), il est
préférable d'initialiser au calcul précédent
déjà convergé.
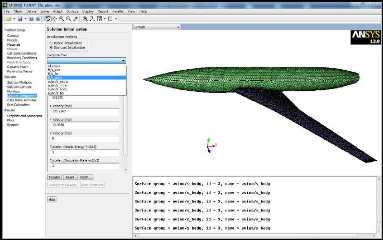
Figure (III.20) : Initialisation des calculs
III.4.1.11. Animation
|
Solve
|
|
|
|
Calculation activities
|
|
|

Pour créer une vidéo qui affiche la
solution il faut activer l'option "Animate"
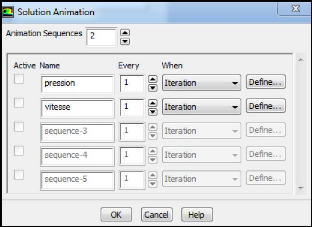
Figure (III.21) : Création
d'animation
Il faut spécifier le type de contour que l'on veut
visualiser : champs de pression, champs de vitesses, etc.
III.4.1.12. Sauvegarde du fichier *.cas
Il est conseillé qu'une fois le
paramétrage est effectué, de sauvegarder le fichier en format
*.cas. S'il y a un bug durant les calculs, il suffit de charger le fichier
*.msh, on n'aura pas à refaire le paramétrage.
III.4.1.13. Lancement de la simulation

Le paramétrage étant effectué, il ne
reste plus qu'à choisir le nombre d'itérations que Fluent devra
réaliser.
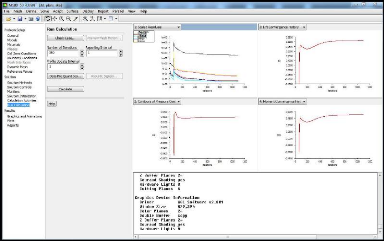
Figure (III.22) : Lancement de la simulation
III.5. Conclusion
Dans ce chapitre nous avons décrire les
étapes générales de génération de maillage
hybride dans ICEM CFD et solution dans Fluent.
Dans l'étape de l'affichage des
résultats, tous les résultats de la simulation peuvent être
affichés, tels que la vitesse, la pression et d'autres paramètres
obtenus lors des calculs. Il est possible de visualiser les contours de
pression, le champ des vecteurs de vitesse, etc.

CHAPITRE
IV
RESULTAS ET
VALIDATIONS
SOMMAIRE PAGE
IV.1. Introduction 59
IV.2. Les Conditions aux limites 59
IV.3. Première simulation 59
IV.4. Deuxième simulation 64
IV.5. Contours de coefficient de pression 72
IV.6. Troisième simulation 75
IV.7. Forces de chaque angle d'incidence 82
IV.8.Calcule des coefficients pour chaque á
82
IV.9. Conclusion 84
IV.1.Introduction
Dans cette section, nous allons présenter les
résultats obtenus avec le code Fluent utilisé dans le cadre de ce
travail, ainsi une vue d'ensemble du procédé de la
vérification et de la validation des simulations. Le traitement consiste
donc à visualiser les résultats. On utilise pour cela les
logiciels de visualisation TECPLOT, ORIGIN et GRAFWIN. L'utilisation de ces
logiciels est a raison plus simple qu'ils permettent de visualiser/tracer des
résultats directement à partir d'un fichier.
La visualisation peut être sous forme des
contours (Mach, Pression) ou sous forme des graphes (Cl, Cd, Cm, Cp...) afin de
les tracer avec des données expérimentales dans le même
plan pour facilité l'interprétation et voir clairement la
différence.
IV.2.Les Conditions aux limites
Cette phase est la plus importante, par ce qu'on doit
savoir le type de condition qui convient à chaque zone. Il existe
plusieurs types de conditions aux limites dans fluent, dans notre travail on
fait la simulation pour un écoulement compressible on utilise dans ce
cas les conditions suivantes : voir tableau (IV.1)
Tableau (IV.1) : Définition des conditions aux
limites
|
Nom
|
Type
|
|
ff/s_entre
|
Pressure-far-field
|
|
ff/s_far
|
Pressure-far-field
|
|
ff/s_sort
|
Pressure-far-field
|
|
avion/s_body
|
Wall
|
|
avion/s_extra
|
Wall
|
|
avion/s_intra
|
Wall
|
|
avion/s_tip
|
Wall
|
|
int_fluid
|
Interior
|
|
symetry/s_sym
|
Symmetry
|
IV.3.Première simulation
IV.3.1. Calcule non visqueux
IV.3.1.1. Configuration d'écoulement
Lors de cette première simulation nous
considérons : Angle d'attaque : 2.873 degrés.
Nombre de mach : 0.8027.
Nombre de Reynolds : 13.1 E+06.
IV.3.1.2. L'histoire de convergence des
résidus
La figure ci-dessous montre l'histoire de convergence
exprimée en termes de résidus.
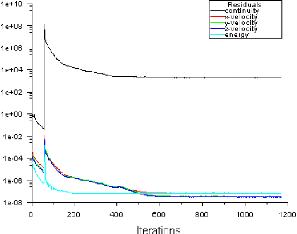
Figure (IV.1) : Historique des résidus
IV.3.1.3. L'histoire de convergence des coefficients
Cd, Cl et Cm
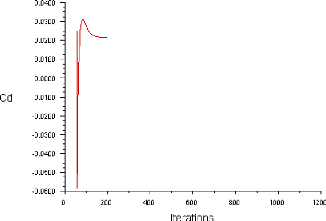
Figure (IV.2) : Historique des Coefficient de
trainée (ORIGIN)
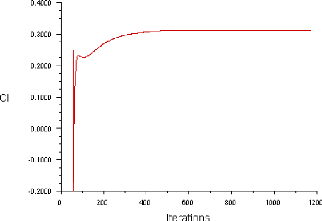
Figure (IV.3) : Historique des Coefficient de Portance
(ORIGIN)
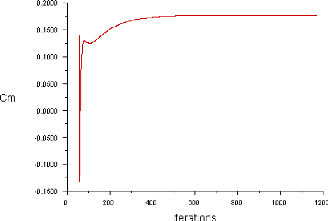
Figure (IV.4) : Historique des Coefficient de Moment
(ORIGIN)
D'après les figures ci-dessus, on peut dire que
la solution a été convergée ; d'une part, parce que le
résidu des variables conservatives a une allure presque constante en
dépassant 600 itérations Figure (IV.1) et d'autre part pour
confirmer la convergence, les Figures (IV.2), (IV.3) et (IV.4) montre l'allure
des coefficients des forces en fonction d'itération dont ces
coefficients prennent des valeurs constantes au dessus de 500
itérations.
IV.1.3. Les contours de pression et vitesse autour d'ARA
M100
Dans l'étape de l'exploitation des
résultats, tous les résultats de la simulation peuvent être
exploités, tels que la vitesse, la pression et autres paramètres
obtenus lors des calculs. Il est possible de visualiser les contours de
pression, le champ des vecteurs de vitesse, etc. Voici ci-dessous quelques
résultats obtenus :
IV.1.3.1. Contours de pression statique sur ARA
M100
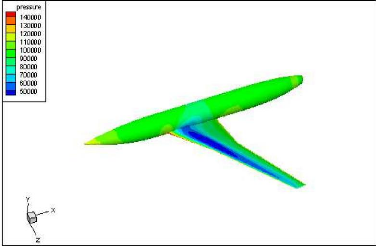
Figure (IV.5) : Répartition de la pression
statique sur ARA M100 extrados (Tecplot)
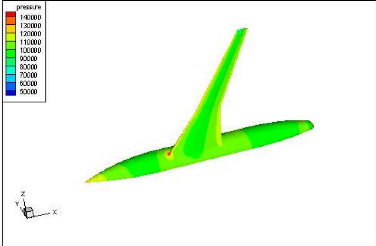
Figure (IV.6) : Répartition de la pression
statique sur ARA M100 intrados (Tecplot)
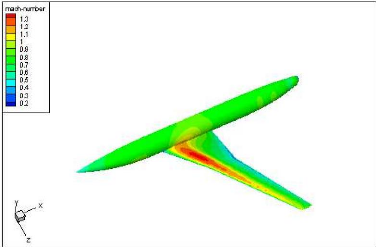
IV.1.3.2. Contours de Mach sur ARA M100

Figure (IV.7) : Répartition du nombre de mach
sur ARA M100 extrados (Tecplot)
Figure (IV.8) : Répartition du nombre
de mach sur ARA M100 intrados (Tecplot)
D'après les contours que l'on a obtenus nous
permet de faire les remarques suivantes :
· Apparition d'une zone de suppression sur
l'intrados et une dépression sur l'extrados due à la direction de
l'écoulement sur le long de l'aile.
· Apparition de deux zones : l'une ou la
pression est maximale (en rouge) qui correspond aux points de vitesse nulle
c'est-à-dire la pression statique est la pression totale .la
deuxième zone ou la pression atteint sa valeur minimale (en
bleu).
IV.4. Deuxième simulation
IV.4.1. Calcule visqueux pour le model de turbulence K
epsilon
IV.4.1.1. L'histoire de convergence des
résidus
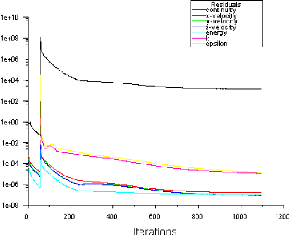
Figure (IV.9) : Historique des résidus
IV.4.1.2. L'histoire de convergence des coefficients
Cd, Cl et Cm
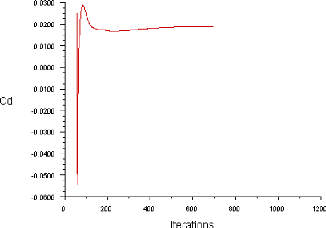
Figure (IV.10) : Historique des Coefficient de
trainée (ORIGIN)
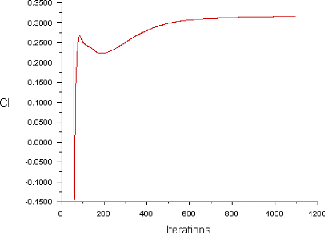
Figure (IV.11) : Historique des Coefficient de Portance
(ORIGIN)
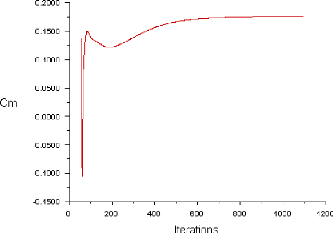
Figure (IV.12) : Historique des Coefficient de Moment
(ORIGIN)
D'après les figures de convergence, on peut
dire que la solution a été convergée, parce que le
résidu des variables conservatives a une allure presque constante en
dépassant 1000 itérations Figure (IV.9), et d'autre part pour
confirmer la convergence, les figures (IV.10), (IV.11) et (IV.12) montre
l'allure des coefficients des forces en fonction d'itération dont ces
coefficients prennent des valeurs constantes au dessus de 1000
itérations.
IV.4.1.3. Vérification de maillage
La figure (IV.13) nous donne un aperçu
général sur le maillage obtenu. La distribution de y+ à la
paroi solide autour d'ARA M100 pour le maillage utilisée est de valeur
y+ = 28.
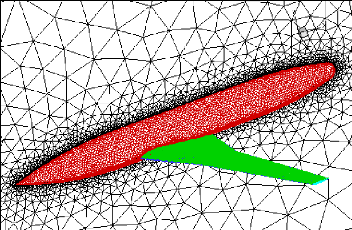
Figure (IV.13) : Maillage de l'avion ARA M100
(Tecplot)
La figure (IV.14) montre la variation d'Y+
plus a la paroi solide de l'aile sur les stations 0.019, 0.325, 0.635 et
0.936
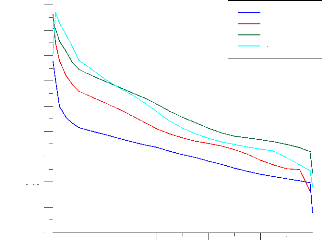
Y Plus
17.00
16.00
15.00
14.00
13.00
12.00
11.00
10.00
9.00
8.00
STATION 0.019 STATION 0.325 STATION 0.635 STATION
0.936
0.00 0.20 0.40 0.60 0.80 1.00
X/C
Figure (IV.14) : Variation d'Y+ plus sur
chaque station de l'aile (GRFWIN)
IV.4.1.4. Contours de pression statique sur ARA
M100
Les figures (IV.13), (V.14) et (IV.15) montrent
respectivement la distribution de pression sur toute la surface de l'avion
ainsi que la distribution sur le profil d'aile.
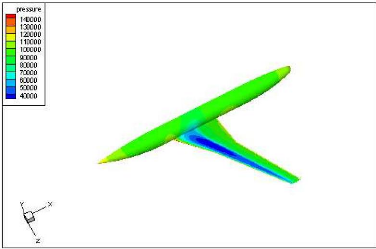
Figure (IV.15) : Répartition de la pression
statique sur ARA M100 extrados (Tecplot)
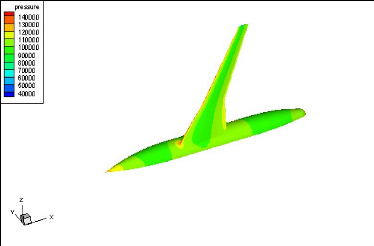
Figure (IV.16) : Répartition de la pression
statique sur ARA M100 intrados(Tecplot)
IV.4.1.5. Contours de pression statique sur le profil
d'aile
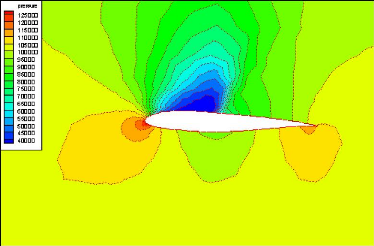
Figure (IV.17) : Contours de pression sur le profil
d'aile IV.4.1.6. Contours de mach sur l'avion
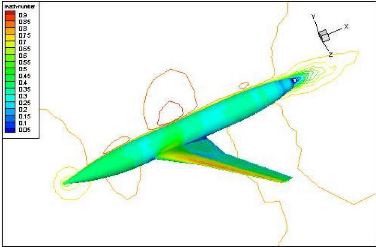
Figure (IV.18) : Contours de Mach sur
l'avion
IV.4.1.7. Contours de Mach sur le profil d'aile
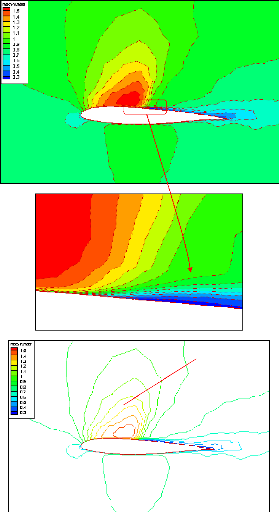
Ligne sonique
Figure (IV.19) : Contours de Mach sur le profil
d'aile
IV.4.1.8. Vecteurs vitesse sur l'avion au plan de
symétrie
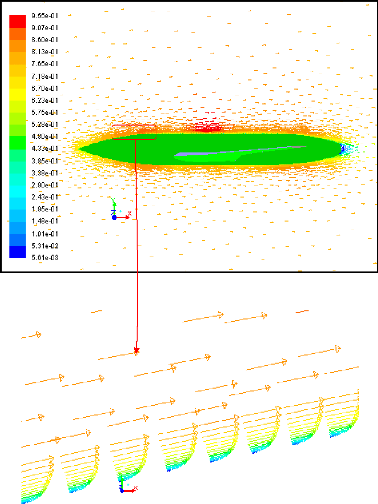
Figure (IV.20) : Vecteurs vitesse sur l'avion au plan
de symétrie
IV.4.1.9. Vecteurs vitesse sur le profil d'aile
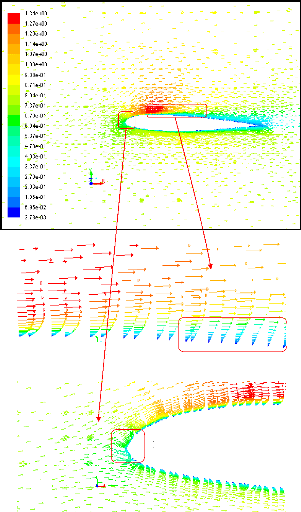
Décollement de la
couche limite
Point d'arrêt
Figure (IV.21) : Vecteurs vitesse sur le profil
d'aile
Interprétation des résultats
L'écoulement amont arrive avec un angle
d'incidence de 2.8730 degrés et il est entièrement
subsonique. Au bord d'attaque se situe le point d'arrêt de
l'écoulement, autour duquel se présente une zone de
ralentissement (basses vitesses), due aux forts gradients de pression. Ensuite
le fluide subit une accélération dans son mouvement sur
l'extrados du profil qui conduit a la présence d'une zone localement
supersonique (1 < M < 1.34). Cette zone est séparée de
l'écoulement extérieur par la ligne sonique (figure IV.17). On
observe alors la formation d'une onde de choc droite forte (avec une petite
courbure), a l'extrados en aval du bord d'attaque. En aval du choc
l'écoulement devient subsonique et décélère en
dehors de la couche limite jusqu'a atteindre le nombre du Mach infini
M8.
Jusqu'à l'apparition de l'onde de choc, la
couche limite est complètement attachée sur la
paroi. Lorsque l'onde incidente rencontre la couche
limite, elle provoque une forte augmentation de la pression statique, qui se
propage en aval du choc et entraine l'épaississement de la couche
limite.
Sur l'intrados du profil, l'écoulement est
complètement attaché à la paroi solide. Dans la
partie
concave on observe une accélération. Le nombre de Mach atteind
des valeurs de
l'ordre de 0.8 et la pression statique diminue. Ensuite
le fluide décélère sur la partie convexe, ce qui provoque
une élévation de la pression statique.
IV.5. Contours de coefficient de pression
Le coefficient de pression est un facteur très
important dans l'aérodynamique, c'est
le rapport de la pression totale par rapport à la
pression de référence. Le coefficient de pression est
défini comme suit:
P-P8
d† = 2 (IV.1)
1 2ñ8Vref
Les résultats de la simulation sont
comparés avec celles expérimentaux en terme de la distribution du
coefficient de pression sur l'intrados et l'extrados dans les stations radiales
suivantes : ç = 0.019, 0.325, 0.635 et 0.936. De la
demi-envergure comme montré dans la figure (IV.22).
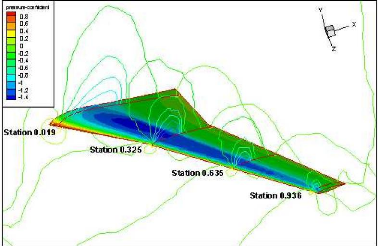
Figure (IV.22) : Stations de mesure de Cp sur l'aile
d'ARA M100 (Tecplot) IV.5.1. Distribution du coefficient de pression sur
l'intrados et l'extrados
Les résultats obtenus pour les deux cas de
simulation précédente (non visqueux et K epsilon) sont
présentés dans même figure avec les résultats
expérimentaux trouvés par AGARD pour chaque station.
Station 0.019 :
0.80

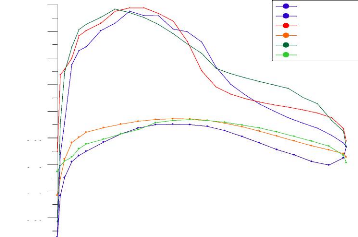
CP
-1.00
-0.80
-0.60
-0.40
-0.20
0.00
0.60
0.20
0.40
STATION 0.019
Cp EXT-EXPR
Cp INT-EXPR
Cp EXT-K epsilon
Cp INT-K epsilon
Cp EXT-NON visqueux
Cp INT-NON visqueux
0.00 0.20 0.40 0.60 0.80 1.00
X/C
Figure (IV.23) : Distribution du coefficient de pression
calculé et expérimental sur l'intrados et l'extrados pour la
station 0.019 (GRAFWIN)
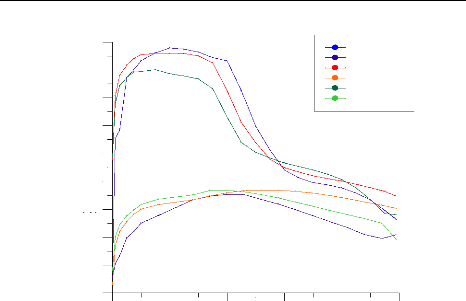
Cp
Station 0.325 :
STATION 0.325
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
-1.50
-1.25
-1.00
Cp EXT-EXPR
Cp INT-EXPR
Cp EXT-K epsilon
Cp INT-K epsilon
Cp EXT-NON visqueux
Cp INT-NON visqueux
0.00 0.20 0.40 0.60 0.80 1.00
x/C
Figure (IV.24) : Distribution du coefficient de pression
calculé et expérimental sur l'intrados et l'extrados pour la
station 0.325 (GRAFWIN)
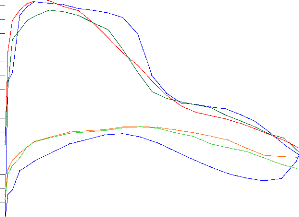
Cp
Station 0.635 :
-1.50
-1.25
-1.00
-0.75
STATION 0.635
Cp EXT-EXPR
Cp INT-EXPR
Cp EXT-K epsilon
Cp INT-K epsilon
Cp EXT-NON visqueux Cp INT-NON visqueux

-0.50
-0.25
0.00
0.25
0.50
0.75

0.00 0.20 0.40 0.60 0.80 1.00
x/C
Figure (IV.25) : Distribution du coefficient de pression
calculé et expérimental sur l'intrados et l'extrados pour la
station 0.635 (GRAFWIN)
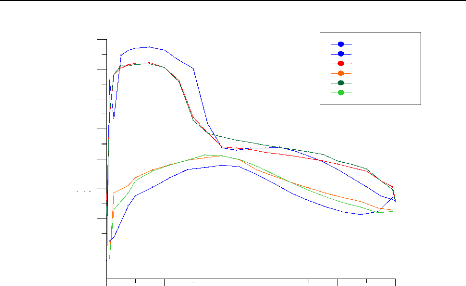
Station 0.936 :
STATION 0.936
-0.50
-0.25
0.00
0.25
0.50
0.75
CP
-1.25
-1.00
-0.75
Cp EXT-EXPR
Cp INT-EXPR
Cp EXT-K epsilon
Cp INT-K epsilon
Cp EXT-NON visqueux
Cp INT-NON visqueux
0.00 0.20 0.40 0.60 0.80 1.00
X/C
Figure (IV.26) : Distribution du coefficient de pression
calculé et expérimental sur l'intrados et l'extrados pour la
station 0.936 (GRAFWIN)
On s'intéresse à l'évolution du
coefficient de pression Cp intrados et extrados du profil en fonction de la
corde adimensionnel x/c. Cette évolution est représentée
sur les figures (IV.20), (IV.21), (IV.22) et (IV.23). La courbe
supérieure se réfère à l'extrados et la courbe
inférieure se réfère à l'intrados. À
l'extrados, on met clairement en évidence la forte dépression
près du bord d'attaque du profil. Sur la fin du profil, la pression
augmente. Pour ce qu'est de l'intrados, on observe aussi une dépression
près du bord d'attaque, mais bien moins intense que celle de l'extrados.
En comparant avec les valeurs expérimentales, on remarque que le Cp a
presque la même allure à mois qu'il y a une faible
différence.
IV.6. Troisième simulation
IV.6.1. Calcule visqueux pour le model de turbulence K
epsilon IV.6.1.1. Configuration d'écoulement
Lors de cette troisième simulation nous
considérons :
· Angle d'attaque variable : -3.0170,
-2,8730, 00 et 3.0170 degrés.
· Nombre de mach : 0,8027.
· Nombre de Reynolds : 13,1 E+06.
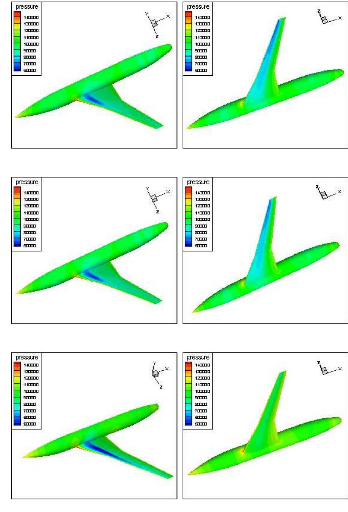
Figure (IV.27) : Contours de pression pour
á=-3.0170 (Tecplot)
á = -2.8730
Figure (IV.28) : Contours de pression pour
á=-2.8730 (Tecplot)
á = 00
Figure (IV.29) : Contours de pression pour
á=00 (Tecplot)
IV.6.1.2. Contours de pression statique sur ARA M100 pour
chaque á á = -3.0170
á = 3.0170
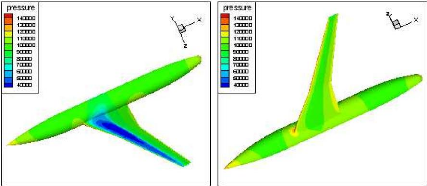
Figure (IV.30) : Contours de pression pour
á=3.0170 (Tecplot) IV.6.1.3. Contours de pression statique
sur le profil d'aile pour chaque á á = -3.0170
á = -2.8730
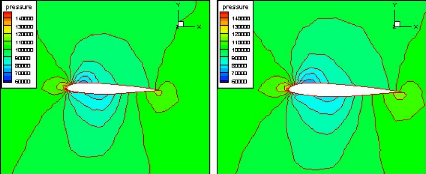
á = 00 á = 3.0170
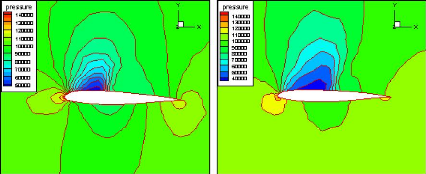
Figure (IV.31) : Contours de pression sur le profil
à á=3.0170, -2.8730, 00 et
3.0170
(Tecplot)
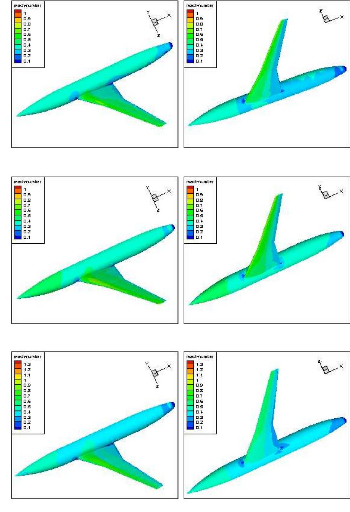
Figure (IV.32) : Contours de Mach pour
á=-3.0170 (Tecplot)
á = -2.8730
Figure (IV.33) : Contours de Mach pour á =
-2.8730 (Tecplot)
á = 00
Figure (IV.34) : Contours de Mach pour
á=00 (Tecplot)
IV.6.1.4. Contours de Mach sur ARA M100 pour chaque
á á = -3.0170
á = 3.0170
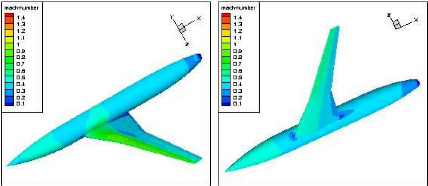
Figure (IV.35) : Contours de Mach pour
á=3.0170 (Tecplot) IV.6.1.5. Contours de Mach sur le profil
d'aile pour chaque á
á = -3.0170 á =
-2.8730
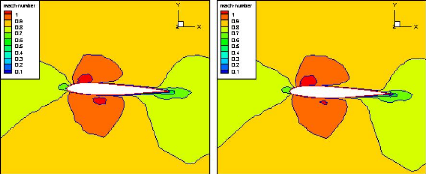
á = 00 á = 3.0170
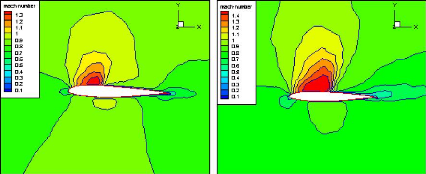
Figure (IV.36) : Contours de Mach sur le profil
à á=3.0170, -2.8730, 00 et
3.0170
(Tecplot)
IV.6.1.6. Coefficient de pression pour chaque
á
Les résultats des coefficients de pression
obtenus pour l'écoulement visqueux K epsilon dans les différents
angles d'incidence á = -3.0170, á =
-2.8730, á = 00 et á = 3.0170
sont présentés dans même figure pour les stations 0.019,
0.325, 0.635 et 0.936. De la demi-envergure.
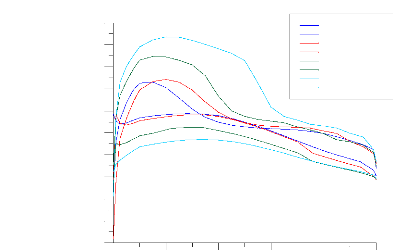
- 0.20
0.00
0.20
0.40
0.60
0.80
CP
STATION 0.019
Cp EXT- ALPHA=-3.017 Cp INT- ALPHA=-3.017 Cp EXT-
ALPHA=-2.873 Cp INT- ALPHA=-2.873
Cp EXT- ALPHA=0 Cp INT- ALPHA=0
Cp EXT- ALPHA=3.017
Cp INT- ALPHA=3.017
Station 0.019 :
- 1.20
- 1.00
- 0.80
- 0.60
- 0.40
0.00 0.20 0.40 0.60 0.80 1.00
X/C
Figure (IV.37) : distribution de Cp dans la station
0.019 (GRAFWIN)
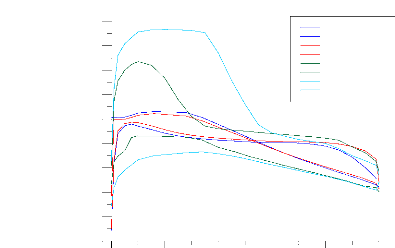
eP
Station 0.325 :
- 1.50
- 1.25
- 1.00
- 0.75
- 0.50
STATION 0.325
- 0.25
0.00
0.25
0.50
0.75
Cp EXT- ALPHA=-3.017 Cp INT- ALPHA=-3.017 Cp EXT-
ALPHA=-2.873 Cp INT- ALPHA=-2.873 Cp EXT- ALPHA=0
Cp INT- ALPHA=0
Cp EXT- ALPHA=3.017 Cp INT- ALPHA=3.017
0.00 0.20 0.40 0.60 0.80 1.00
X/C
Figure (IV.38) : distribution de Cp dans la station
0.325 (GRAFWIN)
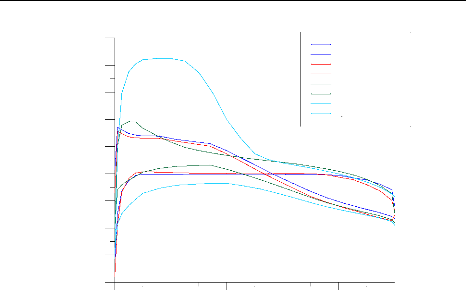
CP
Station 0.635 :
-1.50
STATION 0.635
-0.50
-0.25
0.00
0.25
0.50
0.75
-1.25
-1.00
-0.75
Cp EXT- ALPHA=-3.017 Cp INT- ALPHA=-3.017 Cp EXT-
ALPHA=-2.873 Cp INT- ALPHA=-2.873 Cp EXT- ALPHA=0
Cp INT- ALPHA=0
Cp EXT- ALPHA=3.017 Cp INT- ALPHA=3.017
0.00 0.20 0.40 0.60 0.80 1.00
X/C
Figure (IV.39) : distribution de Cp dans la station 0.635
(GRAFWIN)
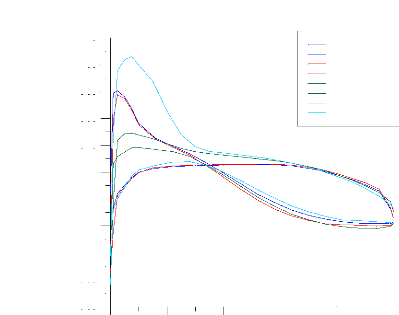
-1.20
-1.00
-0.80
-0.60
-0.40
C p
-0.20
0.00
0.20
0.40
0.60
0.80
Station 0.936 :
STATION 0.936
Cp EXT- ALPHA=-3.017 Cp INT- ALPHA=-3.017 Cp EXT-
ALPHA=-2.873 Cp INT- ALPHA=-2.873 Cp EXT- ALPHA=0
Cp INT- ALPHA=0
Cp EXT- ALPHA=3.017 Cp INT- ALPHA=3.017
0.00 0.20 0.40 0.60 0.80 1.00
X/C
Figure (IV.40) : distribution de Cp dans la station 0.936
(GRAFWIN)
IV.7. Forces de chaque angle d'incidence
Tableau (IV.2) : Forces de pression
|
Vecteur force : (0 Y 0)
|
|
NOM DE
ZONE
|
Force (N)
á=-3.0170
|
Force (N)
á=-2.8730
|
Force (N)
á=00
|
Force (N)
á=2.8730
|
Force (N)
á=3.0170
|
|
s-body
|
115.465
|
142.445
|
452.058
|
773.929
|
789.647
|
|
s-extrados
|
1508.474
|
1595.735
|
2781.304
|
4219.39
|
4289.822
|
|
s-intrados
|
-1764.418
|
-1674.777
|
-625.895
|
157.91
|
189.432
|
|
s-tip
|
-0.324
|
-0.285
|
0.939
|
2.528
|
2.608
|
|
force totale (avion)
|
-140.803
|
63.118
|
2608.406
|
5153.759
|
6071.511
|
Tableau (IV.3) : Forces de viscosité
|
Vecteur force : (X 0 0)
|
|
NOM DE
ZONE
|
Force (N)
á=-3.0170
|
Force (N)
á=-2.8730
|
Force (N)
á=00
|
Force (N)
á=2.8730
|
Force (N)
á=3.0170
|
|
s-body
|
51.526
|
42.894
|
42.677
|
42.697
|
42.701
|
|
s-extrados
|
26.752
|
22.615
|
22.741
|
21.747
|
21.621
|
|
s-intrados
|
25.375
|
21.311
|
21.804
|
22.055
|
22.071
|
|
s-tip
|
0.178
|
0.15
|
0.142
|
0.151
|
0.152
|
|
force totale (avion)
|
103.833
|
86.971
|
87.365
|
86.651
|
86.747
|
IV.8.Calcule des coefficients pour chaque á
ct =
F"
2 pV2S
1
F~
Cd =
2 PV&S 1
(IV. 2)
(IV. 3)
Tableau (IV.4) : Valeurs de Cl et Cd pour chaque
á
|
Angles
Coefficients
|
á=-3.0170
|
á=-2.8730
|
á=00
|
á=2.8730
|
á=3.0170
|
|
Coefficient de portance(Cl)
|
-0.006
|
0.004
|
0.184
|
0.365
|
0.433
|
|
Coefficient de trainée(Cd)
|
0.00308
|
0.00258
|
0.00259
|
0.00258
|
0.00258
|
IV.8.1. Courbe du coefficient de portance Cl
Les calculs ont été effectuées
pour un nombre de Mach à l'infini M=0.8027 et un nombre de Reynolds de
13.1*106. Les mesures des coefficients aérodynamiques Cd
(coefficient de trainée) et Cl (coefficient de la portance) pour ce cas
sont présentés dans les figures (IV.41), (IV.42). Les graphes de
Cl et Cd en fonction de l'angle á est tracé par logiciel
ORIGIN.
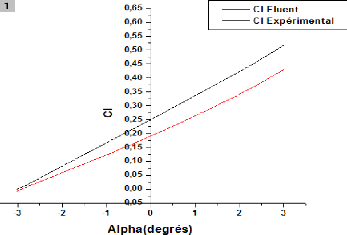
Figure (IV.41) : Variation de Cl en fonction de Alpha
(ORIGIN)
IV.8.2. Courbe du coefficient de trainée Cd
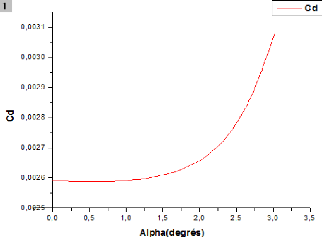
Figure (IV.42) : Variation de Cd en fonction de Alpha
(ORIGIN)
IV.8.3. La polaire
La variation des coefficients de portance et de
traînée en fonction de l'angle d'incidence est souvent
représentée sur un seul diagramme (IV.43). Un tel diagramme
s'appelle la polaire, c'est une courbe de Cd en fonction de Cl pour
différents angles d'incidence.
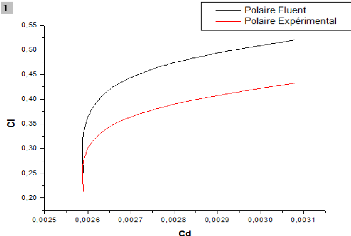
Figure (IV.43) : Variation de Cl en fonction de Cd
(ORIGIN)
Les résultats obtenus par fluent sont
comparés avec l'expérimental et [22, 23].
On voit que le coefficient de portance est
proportionnel à l'angle d'incidence tant que l'écoulement est
laminaire, puis augmente ensuite moins rapidement en écoulement
turbulent. L'avion à une portance négative ceci signifie qu'il y
a une surpression à l'extrados et une dépression à
l'intrados.
On voit également que le coefficient de
trainée varie relativement peu dans la zone des petits angles
d'incidence, ensuite il augmente rapidement dans la zone des grands
angles.
Donc l'évolution des ces courbes obtenus ont
presque une même allure que l'expérimental et [22,
23].
IV.9. Conclusion
Dans ce chapitre nous avons présenté les
résultats des calculs visqueux et non visqueux obtenus par FLUENT pour
la configuration 3D aile/fuselage du model ARA M100, ainsi la validation avec
l'expérimentale.
CONCLUSION GENERALE
CONCLUSION
L `industrie aéronautique est longtemps
considérée comme un secteur très particulier, et le
domaine par excellence où les technologies de pointe se
développent. Les constructeurs disposent actuellement de plusieurs
méthodes de simulation numérique sous forme de codes de calcul.
Néanmoins, il est indispensable de savoir comment ces méthodes
sont élaborées de façon à ne pas appliquer
aveuglément les codes de calcul sous peine de commettre de lourdes
erreurs d'interprétation. C'est notamment dans l'interprétation
que se situe l'art de l'ingénieur.
Notre objectif est d'obtenir les performances
aérodynamique de la configuration Ail-Fuselage du model ARA M100 par
maillage hybride.
Cette étude est une simulation numérique
visant à présenter les capacités du code de calcul FLUENT
sur le traitement de ce genre de problème. Mais aussi de connaitre
l'influence des couches de prisme générées sur
l'épaisseur de la couche limite et le temps de simulation. L'emploi du
code de calcul FLUENT 13 avec un maillage hybride réalisé par le
logiciel ICEM CFD13, a permis d'obtenir des résultats approchant ceux
obtenus expérimentalement.
Grâce à cette étude, on a su
connaître les différentes étapes d'une simulation CFD. Elle
nous a aussi permis de se familiariser avec les logiciels utilisés
(ICEM-CFD et FLUENT) pour la simulation, (TECPLOT, ORIGIN et GRFWIN) pour la
présentation des résultats. Ainsi qu'une connaissance plus
approfondie des problèmes d'écoulement autour de la configuration
Aile-Fuselage du modèle ARA M100, ce qui est un plus dans notre
formation en aéronautique.
Dans la réalisation de ce travail on a
réussi à surmonter les difficultés qui sont :
> L'adaptation du maillage hybride c-à-dire, la
création des couches de prisme sur notre géométrie, ainsi
le raffinage de maillage.
> Manque de documentations dans ce domaine (maillage
3D hybride).
> Les moyens de calcul ne sont pas très
puissants pour ce genre de calcul qui nécessite des supers
calculateurs.
Le but de ce travail n'est pas de trouver de bons
résultats mais de montrer la possibilité de l'utilisation de la
CFD pour la résolution des problèmes liés aux
écoulements complexes.
REFERENCES
[1]: W.C. Thacker. A brief review of techniques for
generating irregular computational grids.
International Journal For Numerical Methods In
Engineering, 15 :1335.1341, 1980.
[2]: S. J. Owen. A survey of unstructured mesh
generation technology, pages 239.267, 1998.
[3]: H. OUALLI. « Influence de la vibration radiale et de
la rotation d'un cylindre circulaire sur l'évolution du sillage proche
». Thèse de doctorat (2006), U.S.T.H.B Alger.
[4]: M. Gad-El-Hak. (2003), « Flow control: passive, active
and reactive flow management »Cambridge University Press, United
Kingdom.
[5]: B. E. Launder and D. B. Spalding
Lectures in Mathematical Models of Turbulence
Academic Press, London, England, 1972
[6]: V. Yakhot, S. A. Orszag.
Renormalization Group Analysis of Turbulence: I.
Basic Theory.Journal of Scientific Computing,
1(1):1-51, 1986.
[7]: T.-H. Shih, W. W. Liou, A. Shabbir, Z. Yang, and J.
Zhu, A New k-å Eddy Viscosity Model for High Reynolds Number
Turbulent Flows - Model Development and Validation.
Computers Fluids, 24(3):227-238, 1995.
[8]: D. C.Wilcox. Turbulence Modeling for
CFD, DCW Industries, Inc., La Canada, California, 1998
[9]: F. R. Menter, M. Kuntz, and R. Langtry,
Ten Years of Experience with the SST Turbulence
Model, In K. Hanjalic, Y. Nagano, and M. Tummers, editors,
Turbulence, Heat and Mass Transfer 4, pages 625-632.
Begell House Inc., 2003.
[10]: M. M. Gibson and B. E. Launder,
Ground Effects on Pressure Fluctuations in the Atmospheric
Boundary Layer J. Fluid Mech., 86:491-511, 1978.
[11]: B. E. Launder. Second-Moment Closure:
Present... and Future? Inter. J. Heat Fluid Flow, 10(4):282-300,
1989.
[12]: B. E. Launder, G. J. Reece, and W. Rodi,
Progress in the Development
[13]: Génération de maillage
département de génie mécanique Ecole Polytechnique de
Montréal janvier 2008
[14]: Ecole doctorale n° 432 : Sciences des
Métiers de l'Ingénieur Thèse doctorat Mohand YOUNSI le 16
novembre 2007
[15]: NAKAHASHI.K (1993). External viscous flow
computations using prismatic grids.
S. Verlag, éditeur, Lecture Notes
in Physics 414, Thirteenth Int. Conf. on Num. Meth.
In Fluid. Dynam. 280-284.
[16]: KALLINDERIS.J et WARD.S,(1993). Prismatic grid
generation for three dimensional complex geometries. AIAA Journal,
Volume 31.
[17]: MARCUM.D (1995). Generation of unstructured grids
for viscous flow applications, 129-151.
[18]: Tutorials ANSYS 13 (IECM CFD).
[19]: Carr, M.P. and Pallister,K.C., Pressure
distributions measured on Research Wing M100 Mounted on an Axysymmetric Body.
AGARD AR-138 Addendum, 1984.
[20]: l'laboratoire d'énergétique et de
mécanique des fluides interne ANSAM, CER de paris
Simulation numérique des écoulements
interne dans les turbomachines PFE octobre
2007.
[21]: Academic College of Tel-Aviv-Yaffo, Computer
Science Department 4 Antokolsky St, Tel Aviv 64044, Israel. Israel Aircraft
Industries, Aerodynamic Dept. CFD Group BenGurion International Airport, Lod,
Israel (ICAS 2002 CONGRESS).
[22]: Marconi, F., Siclary, N., Carpenter, G. and Chow,
R., Comparison of TLNS3D Computations with Test Data for a Transport
Wing/Simple Body Configuration. AIAA paper
94-2237.
[23]: website ht pp :
_hpccp_www_larc_nasa_gov

ANNEXES
ANNEXE A
ANNEXE B
ANNEXE A
1. L'histoire de convergence des
résidus
Les figures ci-dessous montrent l'histoire de convergence
exprimée en termes de résidus pour chaque angle d'incidence
á=-3.0170, -2.8730, 00,
3.0170.
On peut dire que les solutions a été
convergées ; d'une part, parce que le résidu des variables
conservatives a une allure presque constante en dépassant 600
itérations.
Pour á=-3.0170
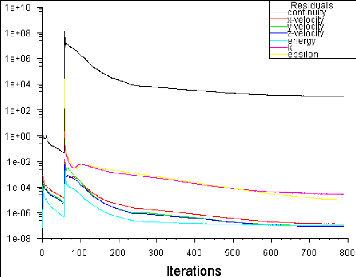
Pour á=-2.8730
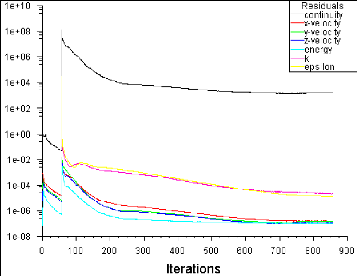
Figure (2) : Historique des résidus Pour
á=-2.8730
Pour á=00
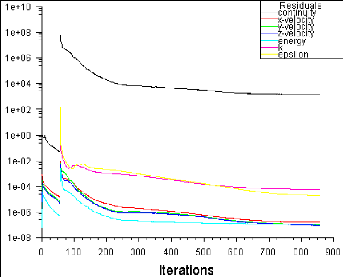
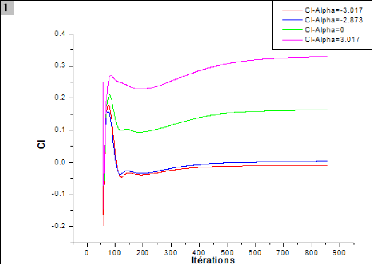
Pour á=3.0170
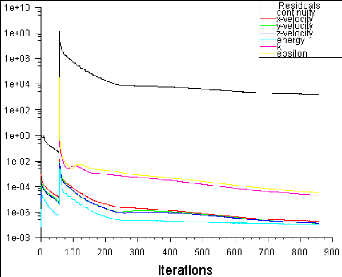
Figure (4) : Historique des résidus Pour
á=3.0170 2. L'histoire de convergence des coefficients Cd, Cl
et Cm
Les figures ci-dessous montrent l'histoire de
convergence des coefficients de portance, de trainée et de moment en
fonction d'itérations pour chaque angle d'incidence.
2.1. Historique de convergence des Coefficient de
Portance Cl
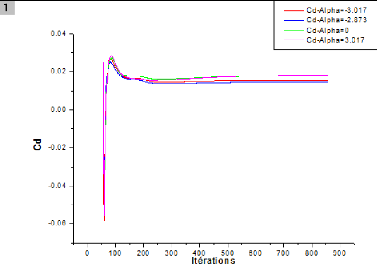
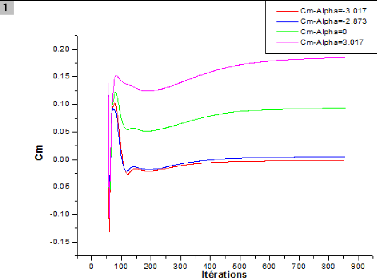
2.2. Historique des Coefficient de
trainée
Figure (6) : Historique des Coefficient de trainée
(ORIGIN) 2.2. Historique des Coefficient de moment
ANNEXE B
Données Expérimentales
Dans cette annexe, se regroupent tous les données
expérimentales du coefficient de pression qui ont été
utilisées pour la validation.
Coefficient de pression CP expérimentale pour:
ETA=0.019
|
X/C
|
Cp
|
|
0.0000000000E+00
|
0.7454000115
|
|
0.9999999776E-02
|
0.1265999973
|
|
0.2500000037E-01
|
-0.1181999967
|
|
0.5000000075E-01
|
-0.5508000255
|
|
0.7500000298E-01
|
-0.6563000083
|
|
0.1000000015
|
-0.6841999888
|
|
0.1500000060
|
-0.8065999746
|
|
0.2000000030
|
-0.8626000285
|
|
0.2500000000
|
-0.9520999789
|
|
0.3000000119
|
-0.9183999896
|
|
0.3499999940
|
-0.9179000258
|
|
0.4000000060
|
-0.8177999854
|
|
0.4499999881
|
-0.7979999781
|
|
0.5000000000
|
-0.7206000090
|
|
0.5500000119
|
-0.5311999917
|
|
0.6000000238
|
-0.4031000137
|
|
0.6499999762
|
-0.3244999945
|
|
0.6999999881
|
-0.2547000051
|
|
0.7500000000
|
-0.2011999935
|
|
0.8000000119
|
-0.1508000046
|
|
0.8500000238
|
-0.1105000004
|
|
0.8999999762
|
-0.7360000163E-01
|
|
0.9499999881
|
-0.1869999990E-01
|
|
0.9900000095
|
0.3810000047E-01
|
|
1.000000000
|
0.6530000269E-01
|
|
0.9999999776E-02
|
0.4345000088
|
|
0.2500000037E-01
|
0.2973000109
|
|
0.5000000075E-01
|
0.1785999984
|
|
0.7500000298E-01
|
0.1322000027
|
|
0.1000000015
|
0.1005999967
|
|
0.1599999964
|
0.3159999847E-01
|
|
0.2199999988
|
-0.2999999933E-01
|
|
0.2800000012
|
-0.7440000027E-01
|
|
0.3400000036
|
-0.9929999709E-01
|
|
0.4000000060
|
-0.1032000035
|
|
0.4600000083
|
-0.9920000285E-01
|
|
0.5199999809
|
-0.8649999648E-01
|
|
0.5799999833
|
-0.5480000004E-01
|
|
0.6399999857
|
-0.1040000003E-01
|
|
0.6999999881
|
0.3720000014E-01
|
|
0.7599999905
|
0.8810000122E-01
|
|
0.8199999928
|
0.1278000027
|
|
0.8799999952
|
0.1773999929
|
|
0.9399999976
|
0.2043000013
|
|
0.9900000095
|
0.1500999928
|
Coefficient de pression CP expérimentale pour:
ETA=0.325
|
X/C
|
Cp
|
|
0.0000000000E+00
|
0.6146000028
|
|
0.9999999776E-02
|
0.6384000182
|
|
0.2500000037E-01
|
0.7091000080
|
|
0.5000000075E-01
|
-1.183599949
|
|
0.7500000298E-01
|
-1.254600048
|
|
0.1000000015
|
-1.334900022
|
|
0.1500000060
|
-1.404199958
|
|
0.2000000030
|
-1.448199987
|
|
0.2500000000
|
-1.437500000
|
|
0.3000000119
|
-1.411499977
|
|
0.3499999940
|
-1.362900019
|
|
0.4000000060
|
-1.333799958
|
|
0.4499999881
|
-1.064299941
|
|
0.5000000000
|
-0.7462999821
|
|
0.5500000119
|
-0.5303999782
|
|
0.6000000238
|
-0.3533000052
|
|
0.6499999762
|
-0.2824000120
|
|
0.6999999881
|
-0.2409999967
|
|
0.7500000000
|
-0.2198999971
|
|
0.8000000119
|
-0.1908999979
|
|
0.8500000238
|
-0.1469999999
|
|
0.8999999762
|
-0.8309999853E-01
|
|
0.9499999881
|
0.1030000020E-01
|
|
0.9900000095
|
0.9009999782E-01
|
|
0.9999999776E-02
|
0.4859000146
|
|
0.2500000037E-01
|
0.4178000093
|
|
0.5000000075E-01
|
0.2558000088
|
|
0.7500000298E-01
|
0.1969999969
|
|
0.1000000015
|
0.1228000000
|
|
0.1599999964
|
0.5499999970E-01
|
|
0.2800000012
|
-0.8420000225E-01
|
|
0.3400000036
|
-0.1185000017
|
|
0.4000000060
|
-0.1344999969
|
|
0.4600000083
|
-0.1316999942
|
|
0.5199999809
|
-0.8820000291E-01
|
|
0.5799999833
|
-0.4569999874E-01
|
|
0.6399999857
|
0.5100000184E-02
|
|
0.6999999881
|
0.5730000138E-01
|
|
0.7599999905
|
0.1111999974
|
|
0.8199999928
|
0.1636999995
|
|
0.8799999952
|
0.2257999927
|
|
0.9399999976
|
0.2617000043
|
|
0.9900000095
|
0.2287999988
|
Coefficient de pression CP expérimentale pour:
ETA=0.635
|
X/C
|
Cp
|
|
0.0000000000E+00
|
0.6557999849
|
|
0.9999999776E-02
|
-0.5781999826
|
|
0.2500000037E-01
|
-0.6524000168
|
|
0.5000000075E-01
|
-1.165300012
|
|
0.7500000298E-01
|
-1.241299987
|
|
0.1000000015
|
-1.284999967
|
|
0.1500000060
|
-1.271700025
|
|
0.2000000030
|
-1.259099960
|
|
0.2500000000
|
-1.224099994
|
|
0.3000000119
|
-1.209900022
|
|
0.3499999940
|
-1.184900045
|
|
0.4000000060
|
-1.145200014
|
|
0.4499999881
|
-0.9991000295
|
|
0.5000000000
|
-0.6259999871
|
|
0.5500000119
|
-0.4677999914
|
|
0.6000000238
|
-0.3826999962
|
|
0.6499999762
|
-0.3716999888
|
|
0.6999999881
|
-0.3467000127
|
|
0.7500000000
|
-0.3321000040
|
|
0.8000000119
|
-0.2806000113
|
|
0.8500000238
|
-0.2196000069
|
|
0.8999999762
|
-0.1206000000
|
|
0.9499999881
|
-0.1219999976E-01
|
|
0.9900000095
|
0.6069999933E-01
|
|
1.000000000
|
0.7680000365E-01
|
|
0.9999999776E-02
|
0.4309999943
|
|
0.2500000037E-01
|
0.3892999887
|
|
0.5000000075E-01
|
0.2185000032
|
|
0.7500000298E-01
|
0.1770000011
|
|
0.1000000015
|
0.1327999979
|
|
0.1599999964
|
0.5420000106E-01
|
|
0.2199999988
|
-0.2050000057E-01
|
|
0.3400000036
|
-0.1001000032
|
|
0.4000000060
|
-0.1106999964
|
|
0.4600000083
|
-0.8160000294E-01
|
|
0.5199999809
|
-0.2740000002E-01
|
|
0.5799999833
|
0.4690000042E-01
|
|
0.6399999857
|
0.1199000031
|
|
0.6999999881
|
0.1871999949
|
|
0.7599999905
|
0.2467000037
|
|
0.8199999928
|
0.2845999897
|
|
0.8799999952
|
0.3093000054
|
|
0.9399999976
|
0.2881999910
|
|
0.9900000095
|
0.1333999932
|
Coefficient de pression CP expérimentale pour:
ETA=0.936
|
X/C
|
Cp
|
|
0.0000000000E+00
|
0.5993999839
|
|
0.9999999776E-02
|
-0.9096999764
|
|
0.2500000037E-01
|
-0.5863000154
|
|
0.5000000075E-01
|
-1.156200051
|
|
0.7500000298E-01
|
-1.208600044
|
|
0.1000000015
|
-1.206599951
|
|
0.1500000060
|
-1.184000015
|
|
0.2000000030
|
-1.159899950
|
|
0.2500000000
|
-1.086300015
|
|
0.3000000119
|
-1.036399961
|
|
0.3499999940
|
-0.5430999994
|
|
0.4000000060
|
-0.3443000019
|
|
0.4499999881
|
-0.3231999874
|
|
0.5000000000
|
-0.3438999951
|
|
0.5500000119
|
-0.3429000080
|
|
0.6000000238
|
-0.3490999937
|
|
0.6499999762
|
-0.3188999891
|
|
0.6999999881
|
-0.2741999924
|
|
0.7500000000
|
-0.2263000011
|
|
0.8000000119
|
-0.1633999944
|
|
0.8500000238
|
-0.9099999815E-01
|
|
0.8999999762
|
-0.1840000041E-01
|
|
0.9499999881
|
0.5959999934E-01
|
|
0.9900000095
|
0.8760000020E-01
|
|
1.000000000
|
0.9950000048E-01
|
|
0.9999999776E-02
|
0.4347000122
|
|
0.2500000037E-01
|
0.4052999914
|
|
0.7500000298E-01
|
0.1415999979
|
|
0.1000000015
|
0.5640000105E-01
|
|
0.1599999964
|
-0.1549999975E-01
|
|
0.2199999988
|
-0.9420000017E-01
|
|
0.2800000012
|
-0.1631000042
|
|
0.3400000036
|
-0.1787000000
|
|
0.4000000060
|
-0.1993000060
|
|
0.4600000083
|
-0.1852999926
|
|
0.5199999809
|
-0.1202000007
|
|
0.5799999833
|
-0.4610000178E-01
|
|
0.6399999857
|
0.3500000015E-01
|
|
0.6999999881
|
0.9730000049E-01
|
|
0.7599999905
|
0.1512999982
|
|
0.8199999928
|
0.1934999973
|
|
0.8799999952
|
0.2138999999
|
|
0.9399999976
|
0.1895000041
|
|
0.9900000095
|
0.6949999928E-01
|


