|
UNIVERSITE D'ORAN
FACULTE DES SCIENCES
Departement d'Informatique
2005

THESE DE VIAGISTER
Discipline : Informatique
Option : Informatique et
Automatique
presentee et soutenue publiquement par
Fatima Zohra
LEBBAH
juin 2005
an Departement d'Informatique, Es-senia
Bond graphs couples pour la surveillance
President Examinateur Examinateur Examinateur
Rapporteur
Mustapha Kamel Rahmouni Djilali Benhamamouch Mohamed Faycal
Khelfi Larbi Sekhri
Hafid Haffaf
Professeur, universite d'oran, es-senia
Maitre de conferences, universite d'oran, es-senia Maitre de
conferences, universite d'oran, es-senia Chargé de corers, universite
d'oran, es-senia Maitre de conferences, universite d'oran, es-senia
Remerciements
Je remercie Monsieur le Professeur Mustapha Kamel Rahmouni
d'avoir accepte d'examiner ce travail et de presider le jury de cette these de
magister.
Mes remerciements s'adressent egalement a Messieurs les
Maitres de conferences Djilali Benhamamouch et Mohamed Faycal Khelfi ainsi que
Monsieur le chargé de cours Larbi Sekhri qui ont accepte d'examiner et
de juger ce travail.
Je remercie Monsieur le Maitre de conferences Hafid Haffaf,
directeur de cette these de m'avoir initiee a la theorie des bond graphs ainsi
que la surveillance industrielle. Je le remercie pour m'avoir cider a bien
mener cette these.
Mes remerciements vont egalement a tout enseignant avant
honorer sa noble mission.
Plus largement, je remercie tous les gens qui ont contribue de
pres ou de loin a mon aboutissement de mon parcours d'etudiante. Qu'ils
trouvent ici mes sinceres vceux.
J'adresse un remerciement particulier a mon frere Yahia pour
sa precieuse aide le long de ma post-graduation. Je le remercie pour ses
encouragements et ses precieux commentaires pour la realisation de ce
travail.
Mes parents et mes sceurs m'ont toujours soutenue avec une
grande determination. Ma mere et mon pere m'ont apportee plus que je ne saurais
decrire en quelques mots. Je leur souhaite ce qu'il y a de meilleur dans la vie
ici-bas et dans Pau-dela.
Enfin, je remercie profondement L.Abdenour pour son soutien le
long de ce travail. Je le remercie sincerement pour ses encouragements .
Résumé
L'outil de modelisation bond graph permet la representation
des informations structurelles et comportementales d'un systeme physique. En
consequence, les Relations de Redondance Analytique (RRAs) peuvent etre
generees. Ces dernieres permettent la detection et la localisation des
defaillances dans une installation industrielle. En d'autres termes, la
determination des RRAs constitue une phase essentielle dans la procedure de
detection et de localisation de defaillances (FDI : Fault Detection and
Isolation procedure) dans la surveillance des systemes physiques.
Les methodes appliquees sur les bond graphs, jusqu'a, present,
sont classees en deux types : methodes directes et methodes indirectes. Ce
memoire presente l'application de l'approche des cycles de l'analyse
structurelle pour la determination des RRAs directement du modele bond graph
simple ou couple.
Nous proposons un nouvel algorithme qui exploite la notion des
chemins causaux en modelisation bond graph. Le but de notre travail est de
tirer profit des avantages des methodes directes et ceux de l'approche des
cycles, pour la generation d'un ensemble de RRAs permettant une forte
localisation de defaillances. Initialement, nous avons concu cet algorithme sur
le graphe structurel correspondant au systeme a surveiller. Une adaptation a
ete faite par la suite, pour les bond graphs couples.
Mots Iles : Bond Graph, Surveillance, Redondance Analytique,
Detection de
defaillances, Theorie des graphes, Analyse structurelle.
Abstract
The bond graph model is a unified tool for modelling dynamics
systems. It represents the structural and the behaviour information of a
physical system. It enables to generate the Analytical Redundancy Relationships
(ARRs). The ARRs allow the faults detection and isolation. In other words, the
generation of the ARRs constitutes an essential step in the Fault Detection and
Isolation procedure (FDI) in the physical systems monitoring.
Two main types of methods are used in the literature. The
first one works directly on the bond graph model, whereas the second exploits
an intermediate model. This master thesis introduces the application of cycles
approach of the structural analysis to generate ARRs, directly from the bond
graph model.
We propose a new algorithm, which exploits the advantages of
the direct methods and the cycle approach. This algorithm works directly on the
bond graph model and uses a search procedure of causal paths. Initially, this
algorithm was designed to be applied on the system structural graph. An
extension of this algorithm is given on bond graph model with multiports
elements.
Key words : Bond Graph, Monitoring, Analytical Redundancy, Fault
Detection, Graphs theory, Structural Analysis.
Table des matieres
|
1
|
La surveillance des systemes physiques
|
7
|
|
1.1
|
Introduction
|
7
|
|
1.2
|
Notions fondamentales de la surveillance
|
8
|
|
1.3
|
Supervision et surveillance
|
11
|
|
1.4
|
Detection et localisation de defaillances
|
12
|
|
1.5
|
Methodes de surveillance
|
13
|
|
|
1.5.1 Methodes avec modele
|
13
|
|
|
1.5.2 Methodes sans modele
|
17
|
|
1.6
|
Conclusion
|
18
|
|
2
|
Generation des relations de redondance analytique
|
21
|
|
2.1
|
Introduction
|
21
|
|
2.2
|
Notion de la redondance
|
22
|
|
2.3
|
La redondance analytique
|
24
|
|
2.4
|
Les relations de redondance
|
25
|
|
|
2.4.1 Relations de redondance directes
|
25
|
|
|
2.4.2 Relations de redondance indirectes
|
26
|
|
2.5
|
L'approche espace de parite
|
27
|
|
|
2.5.1 Espace de parite statique
|
27
|
|
|
2.5.2 Espace de parite dynamique
|
29
|
|
|
2.5.3 Theorie d'elimination
|
32
|
|
2.6
|
Conception et evaluation des residus
|
33
|
|
|
2.6.1 Generation des residus
|
34
|
|
|
2.6.2 Evaluation des residus
|
36
|
|
|
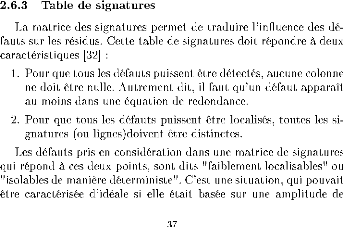
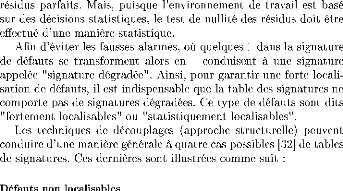
2.6.3 Table de signatures
|
37
|
|
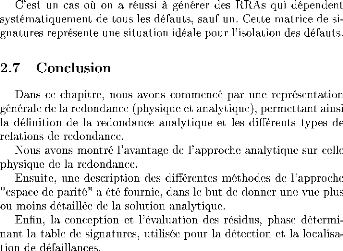
2.7
|
Conclusion
|
39
|
|
3
|
Analyse structurelle
|
41
|
|
3.1
|
Introduction
|
41
|
|
3.2
|
Systeme physique
|
41
|
|
|
3.2.1 Le modele structurel
|
42
|
|
|
3.2.2 Caracterisation des sous-systemes
|
44
|
|
3.3
|
L'approche des couplages
|
46
|
|
|
3.3.1 Couplages et generation des RRAs
|
46
|
|
|
3.3.2 Decomposition canonique
|
51
|
|
3.4
|
L'approche des cycles
|
54
|
|
3.5
|
Conclusion
|
56
|
|
4
|
Modelisation bond graph
|
57
|
|
4.1
|
Introduction
|
57
|
|
4.2
|
Bond graphs simples
|
57
|
|
|
4.2.1 Les elements bond graph
|
57
|
|
|
4.2.2 Les ports
|
59
|
|
|
4.2.3 Notion de causalite
|
64
|
|
|
4.2.4 Les chemins causaux
|
69
|
|
|
4.2.5 Representation matricielle
|
71
|
|
4.3
|
Bond graphs couples
|
75
|
|
|
4.3.1 Les elements multiports
|
75
|
|
|
4.3.2 Les chemins causaux
|
78
|
|
4.4
|
Conclusion
|
84
|
5 Contribution : Les bond graphs couples et la surveillance 87
5.1 Introduction 87
5.2 Generation des RRAs a partir d'un
modele bond graph 88
|
5.2.1
5.2.2
|
Generation indirecte des RRAs
Generation directe des RRAs
|
88
89
|
|
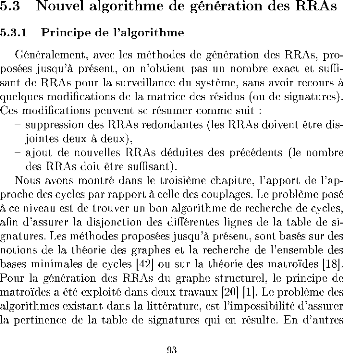
5.3
|
Nouvel algorithms de generation des RRAs
|
93
|
|
5.3.1
|
Principe de l'algorithme
|
93
|
|
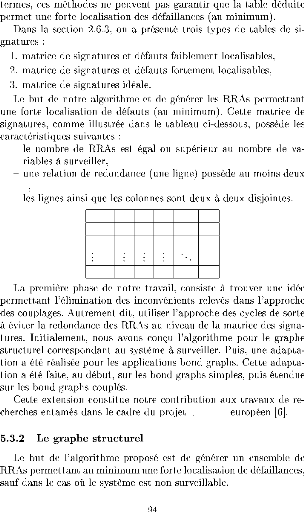
5.3.2
|
Le graphe structurel
|
94
|
|
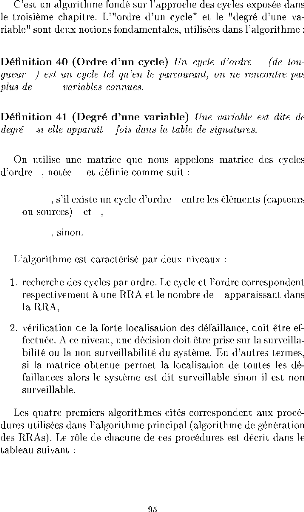
5.3.3
|
Complexite de l'algorithme
|
99
|
|
5.3.4
|
Extension aux bond graphs simples
|
100
|
|
5.3.5
|
Extension aux bond graphs couples
|
103
|
|
5.4
|
Conclusion
|
107
|
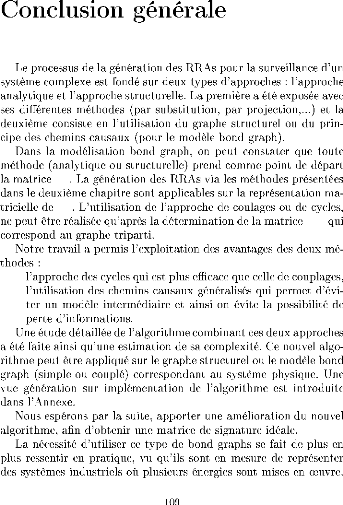
Introduction generale
L'automatisation des systemes de fabrication contribue
enormement dans le developpement de l'industrie. La taille et la complexite de
ces systemes posent des difficultes dans la conception et la mise en ceuvre des
differentes methodes de surveillance. Pour garantir le bon fonctionnement de
ces systemes, it y a besoin de faire appel aux techniques de controle et de
verification, dices techniques de surveillance.
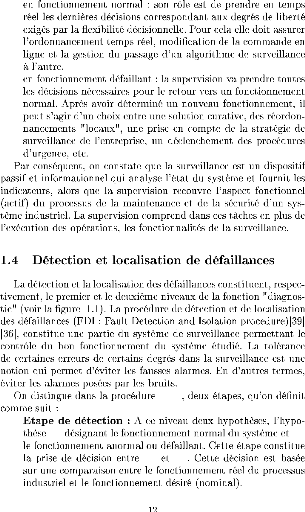
La detection et la localisation des defaillances au niveau
d'une installation industrielle, constitue une Cache essentielle dans le
pro-cede de surveillance.
Pour assurer la surveillance des systemes physiques, d'une
maniere generale, une procedure de detection et de localisation des erreurs
(FDI : Fault Detection and Isolation procedure), permet de suivre un processus
de comparaison entre le comportement voulu (ideal) et le comportement reel
(calcule) du systeme. La structure d'un FDI est composee de deux etapes de
detection et de localisation de defaillances. La redondance analytique
represente une des possibilites de la realisation de la FDI. Elle est bask sur
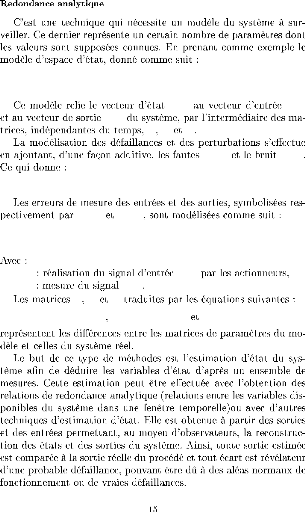
l'utilisation des signaux d'informations disponibles et le modele mathematique
du systeme physique. Les relations de redondance analytique (RRAs) decrivent
les relations existant entre les elements pris en consideration par le cahier
des charges (les variables a surveiller). Le bon fonctionnement du systeme
physique est deduit de la satisfiabilite des RRAs qui verifie la conformite du
comportement du systeme avec le modele de reference. Le choix du modele pour la
conception d'un systeme de surveillance, est une etape importante et difficile,
puisque la qualite des RRAs et la performance du systeme en dependent. Il
existe differents modeles de surveillance dans la litterature : requation
d'etat, la matrice de transfert, le modele structurel et le schema bloc.
Le bond graph est un outil unifie de modelisation des systemes
dynamiques et it permet la conception, la simulation et l'analyse des systemes
complexes. C'est une representation graphique qui genere les informations
structurelles et comportementales du systeme physique.
L'approche structurelle est une notion qui est bask sur la
theorie des graphes. Deux methodes a specifier : celle des couplages et celle
des cycles. Elle est appliquee sur le graphe biparti decrivant la structure du
systeme physique.
L'approche analytique, est celle appliquee sur le modele
math& matique du systeme a surveiller. Deux methodes analytiques sont
decrites dans le deuxieme chapitre, celles d'espace de parite statique et
dynamique et celle de la theorie d'elimination.
Notre travail consiste a trouver un algorithme de generation
des RRAs directement a partir du modele bond graph, en utilisant l'approche
structurelle. Ceci, en combinant les deux approches suivantes :
1. l'approche des cycles, appliquee sur le modele structurel
du systeme. Elle est bask sur des notions de la theorie des graphes.
2. l'approche des chemins causaux generalises, appliquee sur
le modele bond graph du systeme. Elle est bask sur la structure de jonction et
les chemins causaux.
Le but de ce travail, consiste a generer une table de
signature permettant une forte localisation de defaillances.
Dans le premier chapitre, nous presentons une introduction
generale a la supervision et a la surveillance. Nous donnons, par la suite, les
stapes de la procedure de detection et de localisation des defaillances
(FDI).
Dans le deuxieme chapitre, nous nous interessons aux notions
fondamentales des redondances physique et analytique. Une vue intentionnee sera
port& sur la redondance analytique qui represente un concept fondamental de
noire travail. Nous introduisons par la suite les differents types de relations
de redondance. Une definition detainee des methodes de generation des RRAs est
dorm& dans la section 2.4. Nous introduisons dans la section 2.6 d'autres
notions cies dans le processus de diagnostic : la generation des residus et de
la table des signatures avec ses types.
Le troisieme chapitre est consacre a l'analyse structurelle
qui en-globe les deux approche de couplages et celle des cycles. Des notions de
la theorie des graphes sont introduites, pour permettre une bonne explication
des resultats de la recherche des couplages maximaux et ceux des cycles. Nous
presentons par la suite une comparaison entre les deux approches, pour mettre
en evidence les avantages et les inconvenients de chacune des deux approches.
Notre algorithme est fonds sur l'approche de cycles et it permet la recherche
de l'ensemble des cycles permettant la determination d'une table de signature a
defaillances fortement localisables.
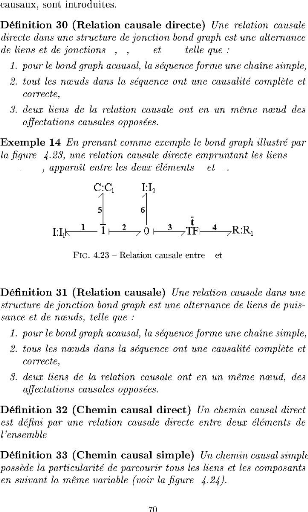
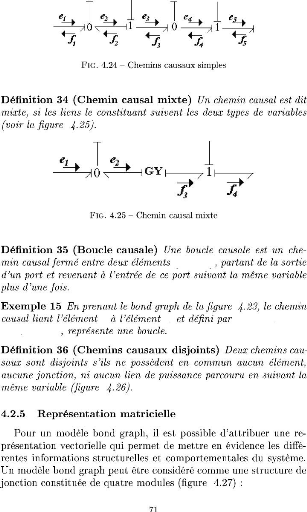
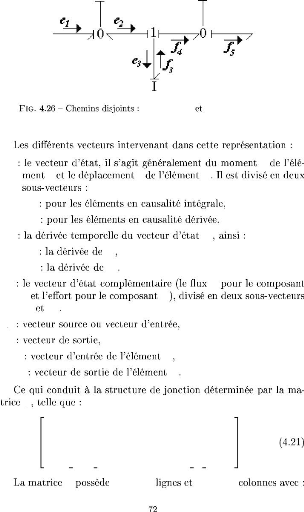
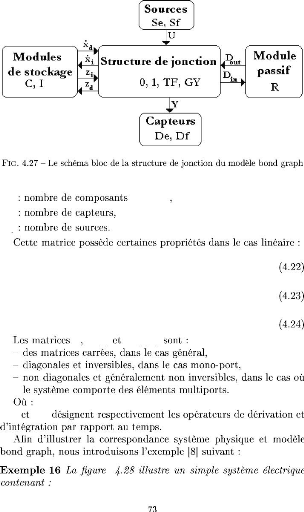
Le quatrieme chapitre est destine aux details de la
modelisation bond graph. Nous decrivons au depart les elements et notions de
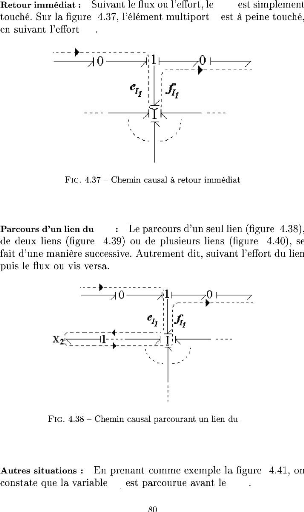
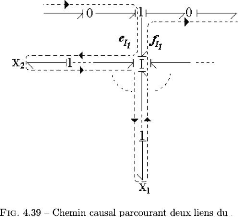
base d'un bond graph simple, ainsi les differents types de chemins causaux.
Nous continuons, avec les bond graphs couples en definissant les elements
multiports et les differents types de chemins causaux.
Le cinquieme chapitre comporte deux parties. Dans la premiere,
nous exposons les differentes methodes directes et indirectes, de generation
des RRAs a partir d'un modele bond graph. La deuxieme est consacree aux details
de noire algorithme de generation des RRAs. Nous commencons par exposer l'idee
de base et le but de la methode. Initialement, nous avons concu l'algorithme
pour etre appliqué sur la representation structurelle du systeme
physique. Par la suite, nous l'avons adapts pour les bonds graphes simples puis
les bonds graphs couples.
Chapitre 1
La surveillance des systemes
physiques
1.1 Introduction
Avec l'automatisation des systemes industrials, une demande
croissante est apparue en matiere de surveillance. Celle-ci a permis le passage
de la maintenance curative a une maintenance preventive, permettant ainsi la
mutation d'une situation ou on subit les pannes a une situation ou on maitrise
les pannes. En se basant sur les donnees quantitatives et/ou qualitatives
fournies par le systeme physique, la fonction "surveillance" permet de prevenir
les dysfonctionnements et d'ecarter les fausses alarmes qui peuvent ralentir la
production. L'importance du domaine de la surveillance dans l'industrie peut
etre interpretee par la variete et la diversite des ouvrages abordant le sujet
des differents cotes [12] [1611411134111511171143114511141130].
L'objectif de ce chapitre est d'initier le lecteur a la notion
de surveillance en donnant les definitions necessaires pour aborder le domaine.
Nous presentons, par la suite un kat de l'art sur les methodes de surveillance,
afin de pouvoir se situer correctement dans le probleme etudie. Afin d'eviter
toute ambiguIte entre la modelisation bond graph et la surveillance, nous avons
prefers ne pas introduire ici leurs liens.
t1 > 0 y
[0,t1]
x(0)
Definition 3 (Surveillance) La surveillance a pour
objectif d'elaborer et de fournir des informations structurees sur la situation
du systeme observe. Elle met en oeuvre des mecanismes d'observation, de
detection et de filtrage pour generer des indicateurs pertinents.
Definition 4 (Defaillance) Une defaillance est
l'alteration ou la cessation de l'aptitude d'un ensemble a accomplir ses
fonctions requises avec les performances definies dans les specifications
techniques. Les defaillances peuvent etre classifiees selon leers degres de
severite, comme suit :
-- defaillance critique : necessite une intervention
d'urgence,
-- defaillance significative : necessite un processus de
traitements, -- defaillance absorbable : pouvant etre ignoree dans un
premier
temps au moins.
·
·
·
Definition 5 (Panne) C'est l'inaptitude d'un dispositif a
accomplir sa fonction requise.
Definition 6 (defaut) Tout ecart entre la caracteristique
observee sur le dispositif et la caracteristique de reference, lorsque celui-ci
est en dehors des specifications
Definition 7 (Detection) La detection des defaillances
d'un systeme physique, ne peut etre faite sans la classification des situations
observables comme etant normales ou anormales. Cette classification n'est pas
triviale etant le manque d'informations caracterisant generalement les
situations anormales. Une situation communement adoptee consiste a considerer
toute situation qui n'est pas normale comme etant une situation
anormale.
Definition 8 (Diagnostic) C'est une determination du type,
de la taille, de l'endroit et de l'instant d'apparition d'un &Put. Elle
Suit la detection de defaut, inclut la localisation et l'identification d'un
defaut
Definition 9 (Mode de fonctionnement) Trois types de
fonctionnement peuvent etre cites a ce niveau :
Mode de fonctionnement nominal : c'est le mode ou le
systeme industriel remplit sa mission dans les conditions de fonctionnement
requises par le constructeur et avec les exigences de l'exploitant.
Mode de fonctionnement degrade : correspond soit a
l'accomplissement partici de la mission, soit a l'accomplissement de celle-ci
avec des performances moindres. Autrement dit, it y a eu une degradation an
niveau du systeme mais pas de defaillance.
Mode de defaillance : correspond an mauvais fonctionnement
du systeme, dic a une defaillance apparue apres une degradation ou une
defaillance brusque. Un mode de defaillance est caracterise par les effets
(mesurables ou qualifiable& causes par cette defaillance. On associe par la
suite une analyse de cause a effet. Ce qui correspond a associer un mode de
defaillance du systeme industriel. A noter qu'un systeme ne possede qu'un seul
mode nominal (cas de fonctionnement normal; par contre it possede plusieurs
mode de defaillance.
Definition 10 (Cahier des charges) Il est difficile de
localiser l'origine de la defaillance dans un processus industriel. Ceci est
chi a
la diversite des composants pouvant etre responsables de
cette defaillance. Autrement dit, une defaillance pent etre reperee an
niveau d'un capteur, un parametre physique (ex : changement de la
valeur de la resistance a cause d'une variation de la temperature), un
actionneur ou un autre.
Le cahier des charges doit repondre aux questions suivantes
:
1. Definition des objectifs : que vent-on surveiller
?
2. Definition des criteres : comment evaluer la qualite du
systeme concu ?
3. Definition des contraintes : quelles sont les limites que
doit respecter le systeme concu ? (delai de detection maximum, coilt...
etc.
Par consequent le cahier des charges pent etre defini en
trois etapes :
-- Etape 1 : Specifier les causes de defaillance (les
composants
pouvant etre responsables de la defaillance) et definir
celles qui
devraient etre prises en compte.
-- Etape 2 : Fixer les criteres de qualite concernant la
detection (fausse alarme, non detection, et delai de detection) et
localisation.
-- Etape 3 : Definir une architecture d'instrumentation
optimale (du systeme de surveillance), vis-a-vis des contraintes de coilt, de
disponibilite de base de donnees brute, incomplete, ... etc. en respectant le
cahier des charges. Cette etape doit etre effectuee par le concepteur du
systeme de surveillance.
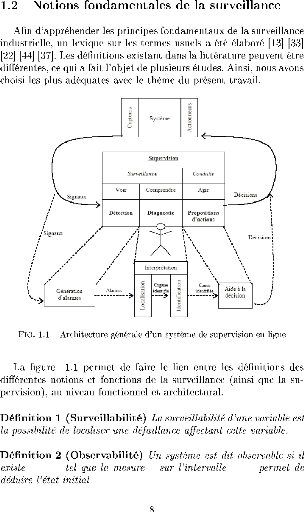
1.3 Supervision et surveillance
Pour pouvoir separer la surveillance de la supervision (figure
1.1), it est indispensable de passer par la definition de chacune d'elles. La
surveillance [44] consiste a &teeter et classer les defaillances du systeme
en observant son evolution, puis a les diagnostiquer en localisant les elements
defaillants et en identifiant les causes premieres. Autrement dit, la
surveillance comporte deux fonctions principales, la detection et le
diagnostic.
Les principales raisons qui conduisent a concevoir un systeme de
surveillance sont :
la conduite : son but est d'optimiser les Caches en lignes (la
production maximale, securite et non degradation des equipements). Ceci passe
par la surveillance du procede afin de &- teeter toute anomalie de
fonctionnement et de l'identifier aussi bien que possible. Ce type d'action est
aussi appele supervision : surveillance + conduite.
la maintenance : Il s'agit toujours de l'optimisation, mais
uniquement au niveau des equipements, Celle que le remplacement ou la
reparation des equipements uses ou defectueux. On peut citer trois types de
maintenance :
La maintenance corrective, elle intervient apres la detection et
la localisation d'un defaut.
La maintenance preventive, elle est effectuee dans le but de
reduire la probabilite d'apparition de defaillance. C'est une maintenance
prevue, preparee et programmee avant la date probable d'apparition d'une
defaillance.
La maintenance conditionnelle, elle represente une alternative
a la maintenance systematique, fait l'objet d'une demande croissants dans les
grandes industries. Elle est bask sur la surveillance en continu de revolution
du systeme, afin de prevoir un dysfonctionnement avant qu'il ne surgisse. La
decision d'intervention preventive est prise lorsqu'il y a evidence
experimentale de defaut imminent ou approche d'un seuil de degradation
predeterminee.
Le role de la supervision [13] est de controler et surveiller
rex& cution d'une operation dans un systeme de production sans rentrer dans
les details de cette execution. Autrement dit elle recouvre l'aspect
fonctionnel du processus industrial :
FDI
H0 H1
H0 H1
n
n
H1i,i = 1..n
i
Surveillance sans
modèle

Surveillance avec
modèle
Outils statistiques
Reconnaissance de
formes
Approche statistique
Approchefloue Réseaux de
neurones
Redondances physique et analytique
Méthodes d'estimation
Paramétrique


Test de franchissement de
seuil
Test de moyenne
Test de
variance



Existence d'un
modèle?


Surveillance industrielle

x(k + 1) =
A.x(k) +
B.u(k)
y(k)
= C.x(k)
x(k)
u(k)
A B C
Fp(k)
bp(k)
x(k + 1) =
Ax(k) +
Bu(k) +
PFp(k) +
Qbp(k)
y(k)
Fu(k)
Fy(k)
eu(k) =
u(k) +
Fu(k) +
bu(k)
ey(k)
= y(k) +
Fy(k) +
by(k)
A B C
Ae = A +
AA(k) Be =
B + AB(k)
Ce = C +
Ac(k)
eu(k)
u(k)
ey(k)
y(k)
e e e
u(t)
y(t)
y(t) =
f(u(t),
è)
àp(t) =
g-1(è(t))
p
è p
è =
g(p)
èà è
u(t)
y(t)
èà =
h(y(1)...y(t);
u(1)...u(t))
èà p
è
è
èà p
pà
Ti
ã
maintenance preventive ; et seuil d'alarme qui impose l'arret
de la production et l'engagement d'une action de maintenance corrective. C'est
une technique dont la mise en ceuvre est tres facile et ne per-met pas
d'etablir un diagnostic des defaillances. Elle est aussi tres sensible aux
fausses alarmes.
Surveillance par reconnaissance des formes
Elle permet d'associer un ensemble de mesures (continues ou
discretes) effectuks sur le systeme a des etats de fonctionnement connus. Ceci
permet d'avoir une relation d'un espace caracteristique vers un espace de
decision, en minimisant les risques de mauvaise classification. On peut citer
comme techniques de surveillance par reconnaissance des formes, technique
classique bask sur les outils de la probabilite, et les techniques bask sur
l'intelligence artificielle (logique floue, reseaux de neurones, ...). La
premiere technique n'est pas tres utilisee puisqu'elle suppose une
reconnaissance a priori de tous les etats du systeme, et ne prend pas en
consideration revolution du systeme. Le deuxieme type de techniques permet
d'eviter rinconvenient de l'approche probabiliste puisqu'elle est bask sur une
phase d'apprentissage.
1.6 Conclusion
L'objectif de ce chapitre etait de donner un apercu sur les
techniques habituelles utilisees pour resoudre les problematiques de la
surveillance.
Nous avons commence par une presentation des definitions des
mots cies de la surveillance industrielle. Cette derniere se base sur la
detection et le diagnostic. La detection permet de signaler toute situation
autre qu'une situation normale, dice anormale, suivie par la fonction
diagnostic qui va localiser le composant defaillant du systeme et identifier la
ou les causes avant provoque cette defaillance.
Pour resoudre le probleme d'ambiguIte pose entre surveillance
et supervision, nous avons essaye de decrire la position fonctionnelle et
architecturale de chacun des deux dispositifs, permettant ainsi de specifier le
role de chacun dans la siirete d'un procede industrial.
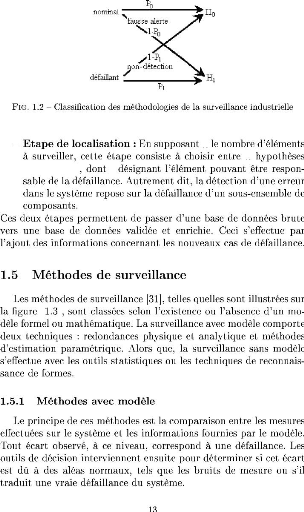
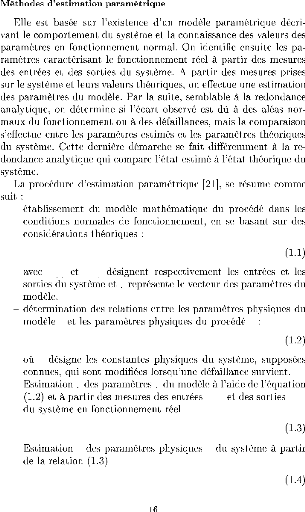
Le classement des techniques de surveillance s'effectue en
fonction de l'existence ou non d'un modele formel (correspondant au systeme
physique). Nous avons presente comme methodes avec modele, la
redondance physique, la redondance analytique et l'estimation parametrique. Et
pour les methodes sans modele , nous avons deux categories : la surveillance
avec outils statistiques et la surveillance avec reconnaissance des formes,
dont chacune comprend plus d'une technique.
La procedure de detection et de localisation des defaillances
(FDI), est une procedure qui est citee generalement dans les cas de
surveillance avec modele. Les etapes fondamentales de cette derniere ont ete
donnees, avec integration des differentes hypotheses connues en matiere de
surveillance.
FDI
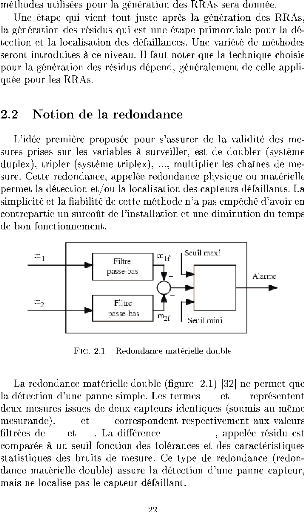
m1f m2f
m1 m2
m1f - m2f
m1 m2
r1 = m1f -
m2f
r2 = m1f -
m3f
r3 = m2f -
m3f
soient ou non de meme nature. Cette methode (voir chapitre
precedent) ne peut etre appliquk qu'en se basant sur un modele formel statique
ou dynamique, lineaire ou non lineaire, deterministe ou stochastique du systeme
industrial.
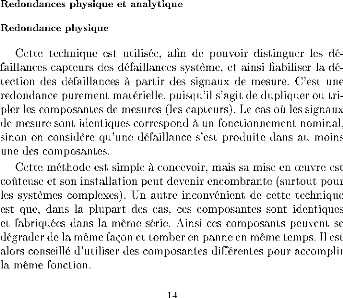
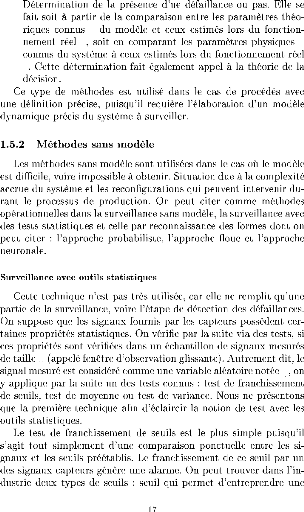
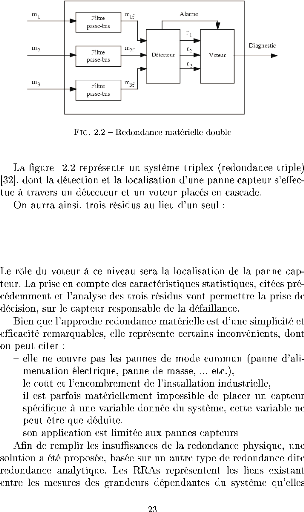
2.3 La redondance analytique
La redondance analytique permet une exploitation optimale des
informations structurelles du systeme physique. C'est une technique bask sur
une redondance implicite au niveau des mesures des grandeurs. La disponibilite
d'un modele formel est une condition necessaire pour l'utilisation de cette
technique. Il faut prkiser que l'approche analytique ne va pas remplacer
l'approche physique, mais elle constitue un complement de cette derniere
[32](voir figure 2.3). Par consequent, la redondance analytique permet de :
augmenter l'ordre de redondance,
augmenter la fiabilite et la siirete du systeme de
surveillance, remplacer un capteur materiel par un capteur mathematique ou
informationnel,
implanter un voteur pour un systeme duplex (redondance physique
double), comme illustre sur la figure 2.3.




FIG. 2.3 -- Redondance materielle et analytique
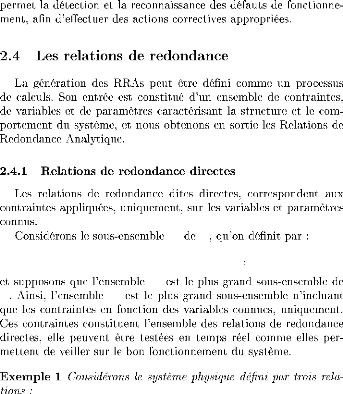
La redondance analytique est une technique qui repose sur les
actions de cause a effet statiques ou dynamiques entre les entrées et
les sorties du systeme physique. Cela permet de surpasser la detection des
defaillances capteurs et le passage vers la detection des defaillances
produites des actionneurs ou du procede lui meme. Ceci
F Fk
F' F
Vf E F',Vx E
X,S(f,x) = 0 Fk

f1(x1,y1) =
0 f2(x2, y2) = 0
f3(y1, y2,
y3) = 0

f3 y1y2
y3
Fx
Fk F Fx = F -- Fk
x
x
f1 f2

f1(y1,x) =
0
f2(y2,x) = 0

x
x = f-1
1 (y1)
x = f-1
2 (y2)

f-1
1 (y1) -- f-1
2 (y2) = 0
k
yk xk fk ek
C
F
yk = Cxk + ek
+ Ffk
x ? IRn y ? IRm f ? IRp
e ? IRm C ? IRm.n F ? IRm.p
pk


pk = Wyk
W q.m
WC = 0
pk = Wek +
WFfk
pk
yk
fk = 0 pk
Wyk = 0
~yk = Cxk + ek
+ F fk Axk = 0
( 1 ~ ( C ~ (
1 ~ ( F ~
yk = xk + ek +
fk
0 A 0 0
( C xk ~
W W = 0
A
p
( 1 )
pk = W yk
0
( 1 ) ( F
)
pk = W ek + W
fk
0 0
( I )
xk = xk2
_A-1
1 A2
xk
( I ~
yk = C xk2 + ek
+ F fk
_A-1
1
( yk )
(I _ C) = ek + F
fk
xk
A A1 A
((A1A2)
~
xk1
xk2
A1
Mzk = bk
xk+1 = Axk + Buk
+ F1fk yk = Cxk +
Duk + F2fk
C
CA
?
????
?
????
?
????
?
????
?
????
?
????
?
????
?
????
+ H2
=
CAs
fk -- s
fk-s+1
fk
uk-s
uk-s+1
uk
xk-s
yk -- s + 1
yk
xk-s + H1
?
????????
H1 =
D 0
CB D
CAB CB
CA8-1B
CA8-2
H1 H2
F2
? CF1
CAR1
H1 =
????????
CA8-1F1
|
0
F2
CF1
CA8-2F1
|
0
0
F2
CA8-3F1
|
· · ·
· · ·
· · ·
· · ·
· · ·
· · ·
|
0
0
0
0
0
CF1
|
0
0 ?
0 ????????
0
0
F2
|
|
x E IRTh
u E IRr B
y E IRm
f E IR F1 F2
s
C
CA
?
????
xk-s + H2
?fk-s
fk-s+1 ? ? ? ?
fk
=
- H1
?
????
CAs
?
????
?
????
?
????
? ?
yk-s
? ? yk-s+1 ?
?
? ?
? ?
yk
uk-s
uk-s+1
uk
0
|
· ·
|
·
|
0
|
0
?
|
0
|
· ·
|
·
|
0
|
0
|
D
|
· ·
· ·
|
·
·
|
0
0
|
0
0
????????
|
|
· ·
|
·
|
0
|
0
|
CA8-3
|
· ·
|
·
|
CB
|
D
|
|
pk =
(W1(z)F1 +
W2(z)F2)fk
pk =
--(W1(z)B +
W2(z)D)uk +
W2(z)yk
?
????
? ?
? ?
? ?
? ?
? ?
?
????
T
- H1
rk = w
uk-s
uk-s+1
uk
= wT
H2
?fk-s
fkfk
-s+1
? ? ?
yk-s
? ?yk-s+1
?
? ? ?
? ? ?
? ? ?
yk
WT
?
?
wT ? ?
CAs
A
CA
?
? ? ?
= 0
xk
rk
s
( A -- zI
C ) xk +
F2 ) k
=--D I ) yk )
W(z) =
W1(z) + W2(z)
W(z) (A --
zI
C ) = 0
pk
fk
W(z)
( A - zI F _ )
1
W (z) = = 0
C F _ 2

? ?
Y
( -I H1 O ) ? U ?
= H2f
xk_s
|
|
|
? ?
yk-s
? yk - s + 1
?
? ?
? ?
? ?
yk
et O =
uk-s
uk-s+1
uk
C
CA
CAs
y =
?
????
?
????
U=
?fk-s
fk-s+1 ? ? ?
?
fk

fi = E
j
cj ...xaj,p
aj,1
pkbj,1
1 ...kbj,q
p
cj E IR aj,k, bj,k E IN
F = f1, ...,
fm
X =
x1, ..., xp
K
= k1, ..., kq
F
fi
K
R[x1
·
·
·
xp, k1
·
·
·
kq] fi
f f =
á1f1 +
á2f2 +
·
·
· +
ámfm ái E IR
?(u, y) = 0 u
y
(f1,
·
·
· ,
fm)
X
fi(x1,
...,xp, k1, ..., kq) = 0
x1
·
·
·
xp k1
·
·
·
kq
IR R[x1
·
·
· xp, k1
·
·
· kq]
f1
·
·
·
fm E
ri = yui - yui
i ? K K
K = {1,
2, · · · }
ri ime
yui ime
cyui ime
ri 0
|ri| > ki > 0 ki ? IR
yu è cyu
yu
ryu = yu-
yu
u(t)
f(t)
y(s) =
Gu(s)u(s)
+
Gf(s)f(s)
?(u,y) = r
(yui) ( cyui)
Hu(s)
Hy(s)
r(s) =
Hu(s)u(s)
+
Hy(s)y(s)
y(s)
r(s) =
(Hu(s) +
Hy(s)Gu(s))u(s)
+
Hy(s)Gf(s)f(s)
y
è
è y
Hu(s)
Hy(s)
Hu(s) +
Hy(s)Gu(s)
= 0
y ènom
ry = y -- y y rè
= ènom
ry
rè
è
r(t) =
(r1(t)r2(t)
· · ·
rp(t))T
r(t) E IRp
p
{ 1 si
|ri(t)| = ki ei(t)
= 0 si |ri(t)| < ki
e(t) =
(e1(t)e2(t)
· · ·
ep(t))T
e(t)
i ? p ki
t ri(t)
ki
Ö
í(t) =
(í1(t)í1(t)
· · ·
ík(t))T
r ? - - Öí
ime Ö
Öi =
eíi eíi e ime
Ö p × k
0 1 ? --
r ? - - 0
r
ri(t)
íi(t)
k
p p = k = 3
ime
ime
?
r = ?
|
? ? ? ? ?
r1 í1 1 0 0
r2 ? ? - - ? í2
? = ?0 1 0 ?
r3 í3 0 0 1
|
?
?
|
í1
í2
í3
|
?
?
|
|
|
Se. {z } |.soo.
}
Ö í
0
1

p1
|
p2
|
p3
|
p4
|
Re1
|
1
|
1
|
0
|
0
|
Re2
|
1
|
1
|
1
|
0
|
Re3
|
1
|
1
|
0
|
1
|
Re4
|
0
|
0
|
1
|
1
|
|

p1 p2
p1
|
p2
|
p3
|
p4
|
Re1
|
1
|
1
|
0
|
0
|
Re2
|
1
|
0
|
1
|
0
|
Re3
|
1
|
1
|
0
|
0
|
Re4
|
0
|
0
|
1
|
1
|
|

|
p1
|
p2
|
p3
|
p4
|
Re1
|
1
|
1
|
0
|
0
|
Re2
|
1
|
0
|
1
|
0
|
Re3
|
0
|
1
|
0
|
1
|
Re4
|
0
|
0
|
1
|
1
|
|


p1
|
p2
|
p3
|
p4
|
Re1
|
0
|
1
|
1
|
1
|
Re2
|
1
|
0
|
1
|
1
|
Re3
|
1
|
1
|
0
|
1
|
Re4
|
1
|
1
|
1
|
0
|
|
40
Umi=1 Ci fi
zj,j =
{1,...,n}

fi(z1, ...,zp)
= 0 1 = p = n

Z = {z1, ...,
zn}

F = {f1, ...,
fm}
Z
|
|
|
u(t)
|
|
|
d(t)
|
|
|
ä(t)
|
|
|
x(t)
|
|
|
y(t)
|
|
|
å(t)
|
|
|
è
|
|
|
|

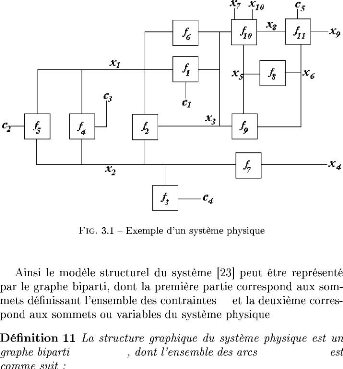
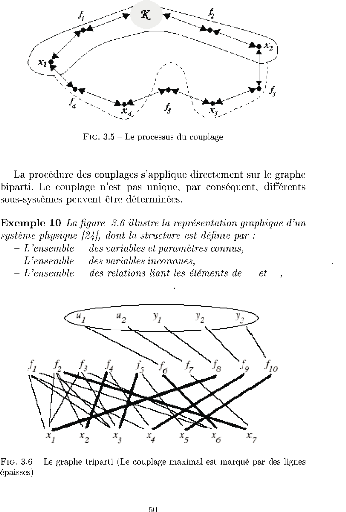
F = {f1,
f2, f3, f4,
f5,
f6,f7,f8,f9,
f10, f11} K
= {c1,c2, c3,
c4, c5}
Z Z = X ? K X
K
F
K
K = U ? P ? Y U P Y
X = {x1,
x2, x3, x4,
x5, x6, x7,
x8, x9, x10}
F
Z
G(F, Z, A) A
c (F x Z)
? ?
?

A
:FxX-->10,11
A*
:XxF-->10,11
KF
:FxK-->10,11

~ 0 si fi
s'applique sur xj
(fi, xj) = aij E A, aij =
1 sinon
~ 0 si xi est calculable en utilisant
xj
(xi, fj) = a* ij E A,
a*ij =
1 sinon
~ 0 si fi
s'applique sur kj
=
(fi,kj) = kifj E A,kifj
1 sinon

Z
K
|
F
|
X
|
K
|
0
|
KF
|
0
|
F
|
KFT
|
0
|
A
|
X
|
0
|
A*
|
0
|
|
|
c1
|
c2
|
c3
|
c4
|
c5
|
x1
|
x2
|
x3
|
x4
|
x5
|
x6
|
x7
|
x8
|
x9
|
x10
|
f1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f4
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f6
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f7
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f8
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f9
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f10
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f11
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
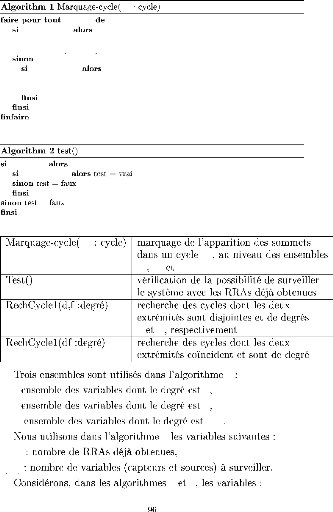
(F, Q(F))
F Fx Q(F) =
Qk(F) U
Qx(f)
Qk(f)
Qx(f)
F(Qk(F),Qx(F))
Qx(F)
Qk(F)
Cardsol(F,
Q(F))
(F, Q(F))
(F, Q(F))
Qk(F)
(F, Q(F))
?ö c F Ö = F
Qx(Ö) =
Qx(F)
Qk(F)
Qx(Ö)
ö Qx(F)
Cardsol(F,
Q(F)) = 1
(F, Q(F))
Qx(Ö) =
Qx(F)
(F,
Qx(F),Qk(F))
Qx(F)
(F, Q(F))
(F, Q(F))
Qk(F)
Qx(F)
F
Cardsol(F,
Q(F)) > 1
Qx(F)
F
Cardsol(F,
Q(F)) =6 0
F
G+
G(X,U) K ?
U
K
i ? X
K ? U K i
Qk(F) F
(F, Qx(F),
Qk(F))
Qx(F)
Qk(F) F
(F, Qx(F),
Qk(F))
Qx(F)
Qk(F)
F Az
K ? U
G(X,U) K
G K
L =
{1,2,3,4}
G(X,Y, U) |X| = |Y |
K
X X
K = U - K
X
X
Az
10
Z
F
K
(f, z) E Az
? S(f, z) = 1 G(FX, X,
AX)
a =
(FX(a),X(a))
FX(a)
X(a)
AXC c AX
Va1, a2 E
AXC a1 =6 a2 ?
FXC(a1) =6
FXC(a2) A XC(a1)
=6 XC(a2)
G+ = (F
+,X+,A+)
Q(F +) = X+
X+ F +
G(FXC, XC, AXC)
G(FX,X,AX)
FXC c FX XC c X
G(FX, X, AX)
G= = (F
=,X=,A=)
Q(F
=)X=
nX+
X= F=
G- = (F
-,X-,A-)
F- X-
G+
|F +| >
|X+|
X+
G+
x
X+
F +
x G=
G-
x1 x2
x1 x2
Knew = K U {x1,
x2}
f1 f2
K
x3 x4
f3 f4
K K =
{u1,u2,y1,y2,y3}
X X =
{x1,x2,x3,x4,x5,x6,x7}
R K XR =
{f1, f2,
f3,f4,f5,f6,f7,f8,f9,
f10}
y2 - f9 =
x4 - f4 = x2 - f2
= x7 - f7 = u2
y1 - f8 = x1 -
f2 = x7 - f7 -
u2
y3 - f10 - =
x5 - f5 - = x3 - f2
- = x7 - f7 - u2
|
u1
|
u2
|
y1
|
y2
|
y3
|
Re1
|
0
|
1
|
0
|
1
|
0
|
Re2
|
0
|
1
|
1
|
0
|
0
|
Re3
|
0
|
1
|
0
|
0
|
1
|
|
u1
u1
u2
u2
u1
u2
G(Fx, X, Ax)
a
(a, 3)
a ? Fx ? 3 ? X Ax
n (a, 3) = ö a
3
Fx 3 X
x
G(Fx, X, Ax)
G(Fx, X, Ax)
dim(G(Fx, X,
Ax)) = min(a,$)?X
(|a| + |3|)

G(FX, X, AX)
(á*,
â*)

(á*,
â*) (á, â)
á* ? á
á* = ö
á ? á*
â* ? â
â* = ö â ?
â*
G(FX, X, AX)
B+ =
G(á*,
â*,
A+X) B-
= G(á*,
â*,
A+X)
B0 =
G(á* \
á*, â* \
â*,
A0X)
á* = {f1, ...,
fk} â* = {x1, ..., xl} ? k
> l
â*
á*
(á*,
â*)
G(FX, X, AX)
(á*,
â*)
A+X
= AX n
(á*.â*)
A-X
= AX n
(á*.â*)
A0X =
AX n (á* \
á*,â* \
â*)
(á*\á*,
â*\â*)
â*
á* \
á* = {fk+1, ...,
fk+p} â* \ â*
= {xl+1,...,xl+p}
â* \ â*
á* \
á*
á* \
á*
C G = [X,U]
C' G C
K
á* =
{fk+p+1, ..., fm}
â* =
{xl+p+1, ..., xn} ? m - k
< n - l
K =
{U,Y1,Y2}
C1 : u1 --
f6--f3--x3--f5--x5--f10--y3
C2 : u1 -- f6
-- x6 -- f1 -- x1 --
f8 -- y1
C3 :
u2--f7--x7--f2--x2--f4--x4--f9--y2
C4 :
y2--f9--x4--f1--x1--f8--y1
C5 :
y2--f9--x4--f1--x3--f5--x5--f10--y3
{i0,i1,...,iq}

C6 : y2 -
f9 - x4 - f1 -
x6 - f6 - u1
C7 : y3 -
f9 - x4 - f4 -
x2 - f2 - x3 -
f5 - x5 - f10 -
u2
C8 : y1 -
f8 - x1 - f2 -
x3 - f7 - u2
C9 : y3 -
f10 - x5 - f5 -
x3 - f2 - x7 -
f7 - u2

|
u1
|
u2
|
y1
|
y2
|
y3
|
Re1
|
0
|
1
|
0
|
1
|
0
|
Re2
|
1
|
0
|
0
|
0
|
1
|
Re3
|
1
|
0
|
1
|
0
|
0
|
Re4
|
0
|
0
|
1
|
1
|
0
|
Re5
|
0
|
0
|
0
|
1
|
1
|
Re6
|
1
|
0
|
0
|
1
|
1
|
Re7
|
0
|
0
|
0
|
1
|
1
|
Re8
|
0
|
1
|
1
|
0
|
0
|
Re9
|
0
|
0
|
0
|
1
|
1
|
|

Chapitre 4
odelisation bond graph
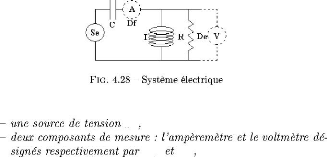
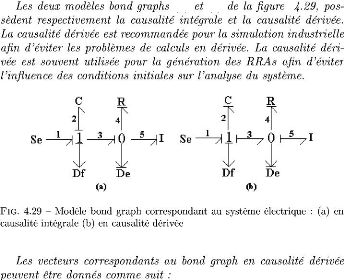
4.1 Introduction
Le modele bond graph a ete invente par H.Paynter en 1961 et
developpe ensuite par Karnopp et Rosenberg en 1983, Thoma en 1975 et 1991 et
Breedveld en 1984 [26]. C'est un outil unifie de modelisation des systemes
dynamiques et it permet la conception, la simulation et l'analyse des systemes
complexes. Il est totalement in-dependant du domaine auquel appartient le
systeme physique. C'est une reproduction graphique du systeme, en utilisant les
sommets et les liens pour representer respectivement les composants et les
relations definissant le systeme.
Dans ce chapitre, nous introduisons les fondements de base de
la modelisation bond graph comportant une classification des elements mono et
multiports ainsi la notion de la causalite. Le concept, chemin causal sera, par
la suite decrit en detail pour les bond graphs simples et les bond graphs
multiports.
4.2 Bond graphs simples
4.2.1 Les elements bond graph Le bond
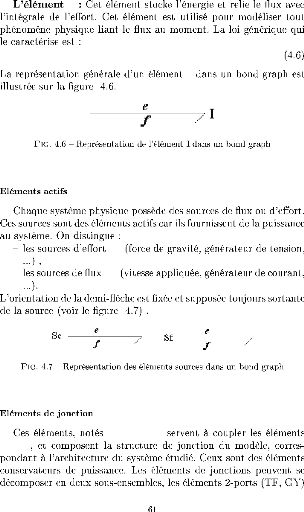
Les elements bond graphs s'echangent l'energie a travers les
bonds. La puissance est le ratio de la derivee de l'energie par rapport au
temps ; la puissance est le produit de l'effort et du flux. Les directions des
deux variables flux et effort sont opposees. A partir de ces
0 1
i V
e f
P = ef
P
u F
p(t) = R 0
t
e(ô)d(ô)
q(t) = f0 t
f(ô)d(ô)
Z t
E(t) =
p(ô)d(ô)
0
|
|
|
|
|
|
e
|
i
|
F
|
q
|
|
F
|
v
|
p
|
x
|
|
t
|
w
|
H
|
q
|
|
P
|
Q
|
Pp
|
V
|
|
(R, C, I, Se, Sf)
(TF,GY ) (0,1)
p(0) q(0)
p(t)
q(t)
Se,Sf
0,1,TF,GY
R
ÖR(e,f) = 0
R
C
ÖC(e,q) = 0
R,C,I
C
I
Sf
Se
I
ÖI(p,f) = 0
R,C,I
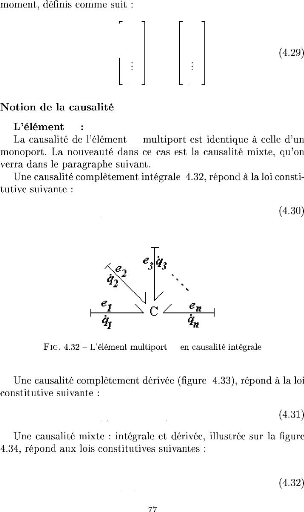
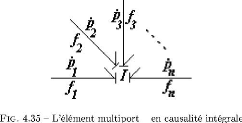
0,1,TF,GY
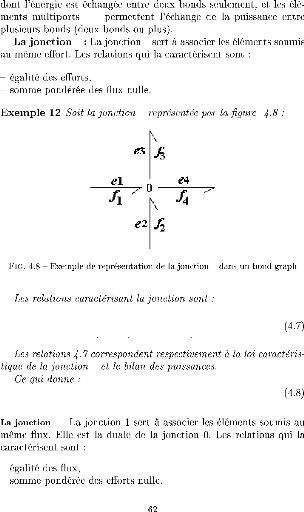
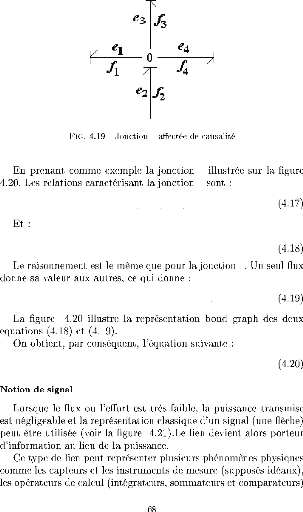
e1 = e2 =
e3 =
e4
e1f1 +
e2f2 -
e3f3 -
e4f4 = 0
0
f1 + f2 - f3
- f4 = 0
1
0, 1
0
0
0 0
e1 =
me2
f2 = mf1
0
1
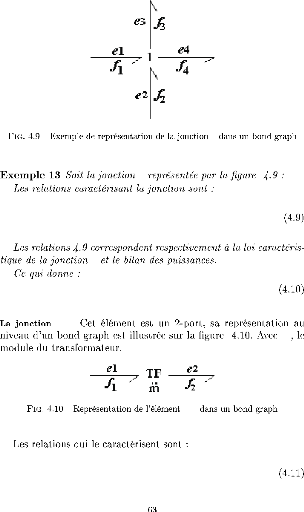
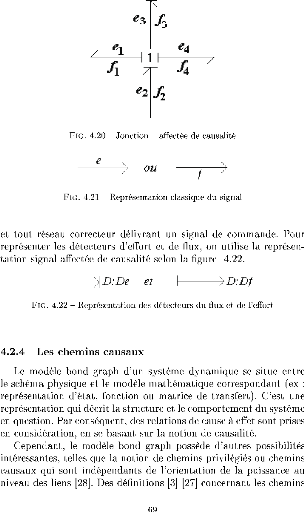
f1 = f2 =
f3 =
f4
e1f1 +
e2f2 -
e3f3 -
e4f4 = 0
1
e1 + e2 - e3
- e4 = 0
TF
m
TF
e1 = rf2
e2 = rf1
0 1
A B A
B p = ef
A B
e A
f
A B f
e
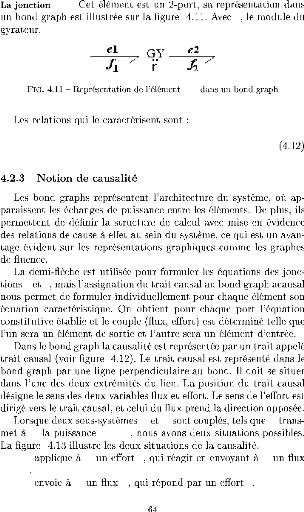
GY
GY
r
FIG. 4.12 -- Position du trait causal au niveau d'un bond
Ces deux cas conduisent a deux schemas blocs differents,
illustres sur la figure 4.13.


FIG. 4.13 -- Les deux differentes situations de la
causalite
Comme la position du trait causal est tout a fait
independante du sens de la demi-fleche, on obtient les deux cas illustres sur
la figure 4.14.
FIG. 4.14 -- Independance de la position du trait causal par
rapport au sens du bond
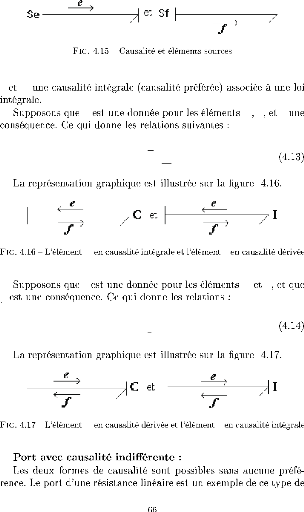
Les differents types de la causalite :
Ports avec causalites fixes : Ce sont les elements de sources
d'effort et de flux qui possedent une causalite fixe (voir figure 4.15).
Cependant, si l'objectif de noire analyse est la derivation du modele
mathematique (Equations d'etat), alors les elements non-lineaires seront
consideres comme des ports avec causalite fixe. C'est le cas ou la relation
constitutive de l'element non-lineaire ne peut pas etre exprimee par une forme
arbitraire de causalite.
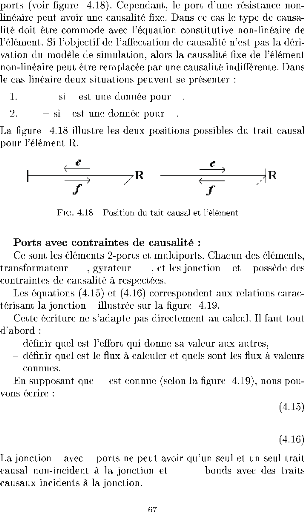
Ports avec causalites preferees : Pour des considerations
d'ordre
numerique et souvent physique, it est plus aise d'integrer que de
de-
river, par consequent on essaiera d'affecter aux elements de stockage
I C
f CI e
eC = 1 f fcdt
C
eI = I dfI
dt
C I
e C I
f
fC = C deC
f eIdt
dt
fI = I 1
C I
e = Rf f R
f = e e R
R
R
TF GY 0 1
0
e2
e1 = e2, e3 =
e2, e4 = e2
f2 = --f1 +
f3 + f4
1 n
n -- 1
0
1
1
f1 = f2 = f3
= f4
e3 = e1 + e2
- e4
e1 - e2 - e3
- e4 = 0
0
f1 = f3, f2 =
f3, f4 = f3
1
0 1 TF GY
1 -
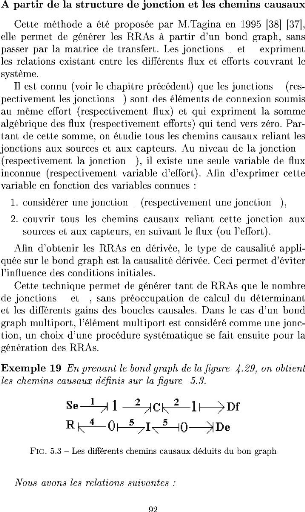
2 - 3 - 4 I
R
I R
E = {C, I, Se, Sf, De, Df}
{R,C,I}
I R 1 - 2 - 3
- 4 -
4 - 3 - 2 -
1
X p
I q C
1 - 5 - 5
- 1 4 - 3
- 6 - 6
- 3 - 4
xi xd
Xÿ X
ÿxi xi
ÿxd xd
Z f
I C
Zi Zd
Y
Din R
Dout R
S
ÿxi
|
|
S11
|
S12
|
S13
|
S14
|
Zi
|
Zd
|
=
|
S21
|
S22
|
S23
|
S24
|
ÿxd
|
Din
|
|
S31
|
S32
|
S33
|
S34
|
Dout
|
Y
|
|
S41
|
S42
|
S43
|
S44
|
U
|
|
U
S (nc
+ns) (nc
+ne)
nc (R,C,I)
ns
ne
Dout = L.Din
s 1/s
Zi = H(s)
ÿxi
Zd =
H'(1/s)
ÿxd
L H(s)
H'(1/s)
Se
Df De

C
I R
(a) (b)

ÿxd = [f2,
e5]tÿxi =
[]t Zd =
[e2, f5]t
Zi = []tt
Dout[f4]tDin
= [e4]t
U
= [Se]t Yout
= [De, Df]t
V
= [Se, e2, e5,
e4, f5, f4,
f2, De, Df]t

e2
f5
e4
Df
De
f2
e5
f4
Se
?
?
?
? =
Zd
Din
Y
?
0 --1 0 1
? 1 0 --1 0
?
= ? 0 1 0 0
? ?1 0 0 0
0 1 0 0
R CISe Sf De Df TF GY
0 1
R C I
C I
C C
n C
ime ÿqi
C
Z t >n Z t >n Z t
>n Z q
E = (eifi)dt
= (ei ÿqi)dt =
(eiq()dqi =
e(q)dq =
E(q)
t0 i=1 t0
i=1 t0 i=1
q0
q1
q2
q3
e1
e2
e3
q =
, e =
qn
en
Z t >n Z t >n Z t >:n Z
p
E = (fiei)dt
= (fi ÿpi)dt =
(fip()dpi =
f(p)dp =
E(p)
t0 t0 t0
p0
i=1 i=1
i=1
E C
fidt = dqi
edq etdq et
e
I
I
C
n I
I
E I
f p
ei =
ÖCi(q1, q2,
· · · , qj, ej+1,· · · ,
en), i =
1,2,· · · ,j
f1
f2
f3
,f =
fn
C
ei = Ö-1
Ci
(q1,q2,···,qn),i
= 1,2,···,n
? p1
? p2 ?
p = ? p3
pn
C
C
qi =
ÖCi(e1,e2,··
· ,en),i =
1,2, · ··,n
qk = Ö-1
Ci (q1,
q2, · · ·, qj,
ej+1,···,
en),k = j,
2,··· ,m
C
C
I
I
C
fi = Ö-1
Ci
(p1,p2, · · ·
,pn), i = 1,2,
· · · ,m
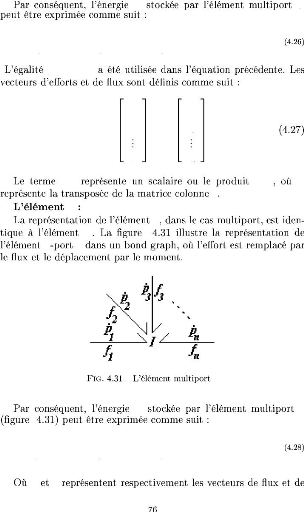
I
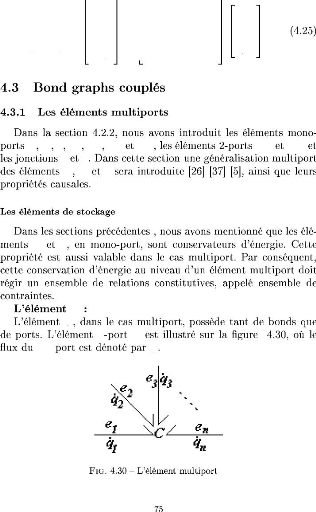
MP

MP
MP
eI% MP
eI1
MP I
MP

MP
0 C0
MP
1 C1
MP
2 C2
MP
1 - 2 C1 -
2
MP
MP
MP

MP
0 C0
MP
{R,C,I}
t Tt 1 < t <
dim(M) dim(M)
MP t
1 C1
MP
2 C2
MP
1-2 C1-2
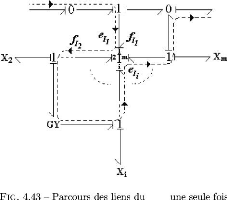
MP
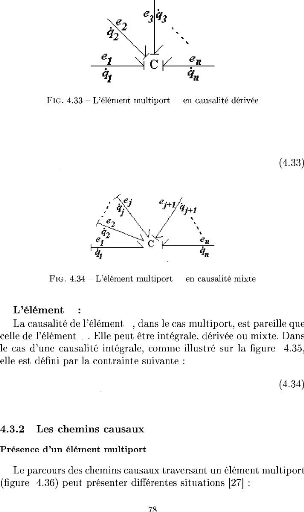
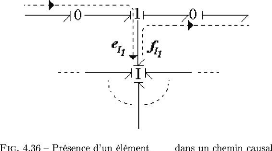
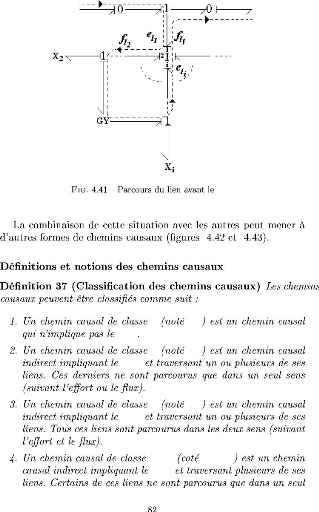
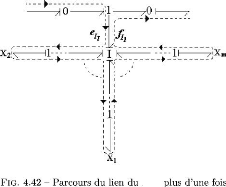
le cas des multiports, le probleme combinatoire de parcours
des chemins causaux est accentue. La notion de chemins causaux et leur
classification ont ete fournies par la suite afin de mieux aborder le chapitre
suivant.
Chapitre 5
Contribution : Les bond
graphs couples et la
surveillance
5.1 Introduction
Il existe differentes methodes de generation de RRAs a partir
d'un modele bond graph. Deux possibilites peuvent etre proposees pour la
classification de ces methodes :
classification [29] en methodes directes et indirectes,
classification [37] en methodes analytiques et structurelles.
Dans ce chapitre, nous allons presenter les differentes
methodes appliquees dans la surveillance des systemes physiques. Nous
presentons les methodes directes qui permettent une generation des RRAs
directement du bond graph, et celles qui determinent les RRAs a partir d'un
modele intermediaire. Nous exposons, par la suite, noire algorithme avec sa
complexite. Nous decrivons la conception de l'algorithme [29] pour le graphe
structure) et son extension vers les bond graphs simples et les bond graphs
couples.
p
I
C
I C R
I q C
ABC D
R TF GY
?
????
1
?
?
D(s)
?
? =
De1
Df1
Df2
b1 M1
s2
?
?
? ? ? ?
?
|
V1
F1
F2
|
?
?
|
|

(1+M2 s2
k1 )
--b1s b1M1
s3
k1 k2
k1 (1+b1 k1 s )
1 + b1 s (1 +
M2 k1 s )
k1 s + (1 + b1
k1 s ) s s
k1 k1 k2
(1+b1 s (1+b1 k1 s
+M1 s2
k1 )
1 + b1 k1 s
+ M1 s2 k1 )
s s
k1 k2 k2


F2
F1 F2
V1F1 F2
V1F1
D(s) = 1 +
M2s2
k2 +
M1s2
k2 +
M1s2
k1 + b1s
k1 + b1s
k1
(M2s2
k2 +
M1s2
k2 ) +
M1M2s4
k1k2

|
De1
|
Df1
|
Df2
|
V1
|
F1
|
F2
|
Re1
|
1
|
0
|
0
|
1
|
1
|
1
|
Re2
|
0
|
1
|
0
|
1
|
1
|
1
|
Re3
|
0
|
0
|
1
|
1
|
1
|
1
|
|
~
-I -M'
~ S
M = I
Y
MT(s)
S
M
U
S11
? ? S31
M =? ? S41
? ? I1
?0 0
|
S12 S22
S32 S42 0
I2
0
|
? ? S21
S13 S23
S33 S43 0
0
I3
|
S14 S24
S34 S44 0
0
0
|
-I1
0
0
0
-H(1/s)
0
0
|
0
-I2
0
0
0
-H'(1/s)
0
|
0
0
-I3
0 0 0 -L
|
0 0 0 -I4
0
0
0
|
|
M'
?
M'.V = 0
M
Mij
i j
(2mc +
ms) 2mc
ms
I1I2I3
I4
M.V = 0
M
V
M
M 1
M*
M*


F1
F5
F2
M* = F7
F8
F6
F3
F4
|
?
?
?
?
?
?
|
0 1 0 1 0 1 0 0
|
1 0 1 0 1 0 1 0
|
0 1 0 0 0 0 0 1
|
1 0 0 0 0 0 0 0
|
1 0 0 0 0 1 0 0
|
0 1 0 0 0 0 1 0
|
0 0 1 0 0 0 0 1
|
0 0 0 1 0 0 0 0
|
0 0 0 0 1 0 0 0
|
|
|
Se
|
De
|
Df
|
Re1
|
1
|
1
|
0
|
Re2
|
0
|
1
|
1
|
|
0 1
0
1
0
1
0 1
0 1

0 e2 = e1 -
e3
e3 = De e1 = Se Df
= (Cs)e2

1 f5 = f3 -
f4

f3 = Df f4 = De/R De
= (Is)f5
Df = Cs(Se -
De)
De = Is(Df -
De/R)
|
|
|

|
Se
|
De
|
Df
|
Re1
|
1
|
1
|
1
|
Re2
|
0
|
1
|
1
|
|
1
|
y1
|
y2
|
y3
|
· · ·
|
yn
|
Re1
|
1
|
1
|
0
|
· · ·
|
0
|
Re2
|
0
|
1
|
1
|
· · ·
|
0
|
|
|
|
|
|
1
|
Ren
|
1
|
0
|
0
|
· · ·
|
1
|
|
CHEM
d d
q
q - 1
1 C
q
C[i,j] = 1 1
i j
C[i,j] = 0
1
C,
sommet C'
sommet E K0
K0 = K0 - {sommet}
K1 = K1 U {sommet}
NR = |K|
K0 = K1 =
ö
sommet E K1
K1 = K1 - {sommet}
K+ 2 = K+ 2 U {sommet}
2
NR |K|
3 4
K0 0
K1 1
1
K+ = 2
2
l 1
i Kd
j Kf
? l i j
C
l 1
i Kdf
? l i i
C
l
d f
5
RRAs
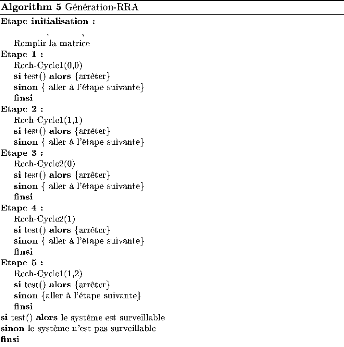
K0 = K K1 = ö
K+ 2 = ö
C

|
Se
|
De
|
Df
|
|
C1
|
1
|
1
|
0
|
|
C2
|
1
|
0
|
1
|
|
C3
|
0
|
1
|
1
|

|
Se
|
De
|
Df
|
|
Re1
|
1
|
1
|
0
|
|
Re2
|
1
|
0
|
1
|
|
Re2
|
0
|
1
|
1
|

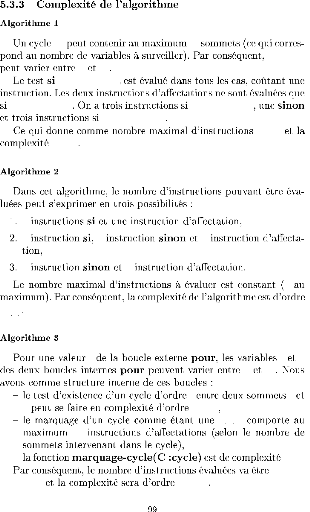
C' N
sommet
1 N sommet E K0
sommet E K0 sommet E K0
sommet E K1
N * 3
O(N)
2
1 1 1
1 1
3
O(1)
l i j
1 N
l i
j O(N)
RRA
N
O(N) N *N *
N * (3N)
O(N4)
O(N4)
{,,,,}
l i
i O(N)
l i
1 N
O(N)
N *N *
RRA
N
(3N)
O(N3)
3
O(1)
C
O(N2) 5
O(N4)
O(N3)
O(1)

Ci ime
Ca
Ei ime
Ce
C1 Ca= {Se,
e2, f2, Df}
C2Ca = {Se, e5,
De}
C3Ca =
{Df, f2, f5, e5,
De}
E1 Ce= {Se,
e2, f2, Df}
E2Ce = {Se, e2,
f2, f3, f5,
e5, De}
|
|
|
0
|
f(ei, ej)
f(fi, fj)
|
|
1
|
f(ei, ej)
f(fi, fj)
|
|
C
|
f(ei, fj)
|
|
I
|
f(fi, ej)
|
|
R
|
f(ei, fj)
|

Se De Df
MP
C

|
Se
|
De
|
Df
|
|
C1
|
1
|
1
|
0
|
|
C2
|
1
|
0
|
1
|

|
Se
|
De
|
Df
|
|
Re1
|
1
|
1
|
0
|
|
Re2
|
1
|
0
|
1
|
|
Re2
|
1
|
1
|
1
|
eh
et
ec
?
E = ?
? ? ?
fh
? , F = ? ft ?
fc
fhft fc
ehet ec
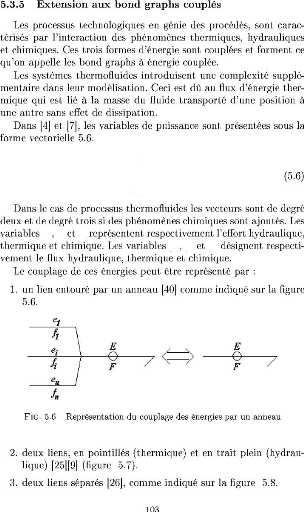
FIG. 5.7 -- Representation du couplage des energies par deux
liens en pointilles et en trait plein


FIG. 5.8 -- Representation du couplage des energies par deux
liens separes
Les bond graphs couples ne sont pas directement utilises comme
support a la surveillance. Afin de generer les RRAs, des transformations
doivent etre effectuees au niveau du bond grah couple. L'utilisation de la
causalite integrals permet d'eviter les difficultes de calculs numeriques de la
derivee du residu lors de la simulation.
Les methodes de redondance analytique et de l'analyse
structurelle ont fait l'objet d'application a des processus thermofluides, tels
que :
-- un generateur de vapeur,
un condensateur d'une installation pilote complexe representant
le fonctionnement d'une centrale a echelle reduite.
Les deux approches initialement proposees [11], pour la
surveillance
avec les bond graphs couples sont :
1. &coupler les liens couples en liens simples puis
appliquer les outils déjà developpes pour les bond graphs
monoenergie,
2. proposer une methode de linearisation des muliports
permettant ensuite une analyse du bond graph par un parcours de chemins causaux
generalises.
Notre but dans ce travail est de permettre la surveillance par
les bond graphs couples sans transformations. Ceci en adaptant le nouvel
algorithms (1' algorithme 5) directement sur le modele bond graph.
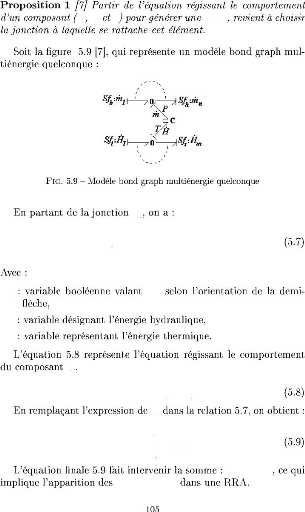
Xn
i=1
Ös : mÿ
+
ai ÿmi = 0
ÿH)
Xn
i=1
ai ÿmi = 0
ö-1
h (P,
ÿH) +
Pn i=1 ai
ÿmi
R C I RRA
0h
ai #177;1
mÿ
Hÿ
C
Öb : P =
öh( ÿm,
ÿmi (i = 1 ·
m)
mÿ
Sfh
fh = Pn i=1 ai
ÿmi
I
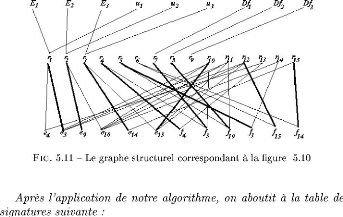
|
E1
|
E2
|
E3
|
u1
|
u2
|
u3
|
Df1
|
Df2
|
Df3
|
|
C1
|
1
|
0
|
0
|
1
|
0
|
0
|
1
|
0
|
0
|
|
C2
|
1
|
0
|
0
|
1
|
0
|
0
|
0
|
1
|
0
|
|
C3
|
1
|
0
|
0
|
1
|
0
|
0
|
0
|
0
|
1
|
|
C4
|
0
|
1
|
0
|
0
|
1
|
0
|
1
|
0
|
0
|
|
C5
|
0
|
1
|
0
|
0
|
1
|
0
|
0
|
1
|
0
|
|
C6
|
0
|
1
|
0
|
0
|
1
|
0
|
0
|
0
|
1
|
|
C7
|
0
|
0
|
1
|
0
|
0
|
1
|
1
|
0
|
0
|
|
C8
|
0
|
0
|
1
|
0
|
0
|
1
|
0
|
1
|
0
|
|
C9
|
0
|
0
|
1
|
0
|
0
|
1
|
0
|
0
|
1
|
(E1,u1)
(E2,u2)
(E3,u3)
|
E1
|
E2
|
E3
|
u1
|
u2
|
u3
|
Df1
|
Df2
|
Df3
|
|
Re1
|
1
|
0
|
0
|
1
|
0
|
0
|
1
|
0
|
0
|
|
Re2
|
1
|
0
|
0
|
1
|
0
|
0
|
0
|
1
|
0
|
|
Re3
|
1
|
0
|
0
|
1
|
0
|
0
|
0
|
0
|
1
|
|
Re4
|
0
|
1
|
0
|
0
|
1
|
0
|
1
|
0
|
0
|
|
Re5
|
0
|
1
|
0
|
0
|
1
|
0
|
0
|
1
|
0
|
|
Re6
|
0
|
1
|
0
|
0
|
1
|
0
|
0
|
0
|
1
|
|
Re7
|
0
|
0
|
1
|
0
|
0
|
1
|
1
|
0
|
0
|
|
Re8
|
0
|
0
|
1
|
0
|
0
|
1
|
0
|
1
|
0
|
|
Re9
|
0
|
0
|
1
|
0
|
0
|
1
|
0
|
0
|
1
|
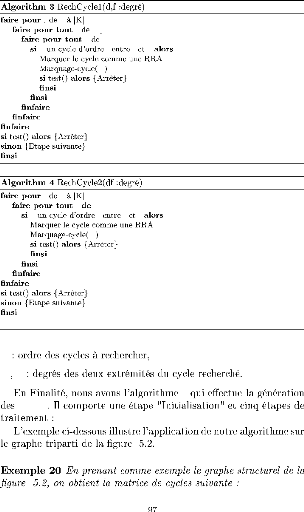
Nous avons commence par la presentation du principe (l'idee de
base) de l'algorithme et son application sur le graphe structurel correspondant
au systeme physique. A ce niveau, un exemple illustratif de l'algorithme a ete
donne.
L'interet du present travail etait de permettre une generation
de la table de signatures, directement du modele bond graph, autrement dit sans
utilisation d'un modele intermediaire (graphique ou mathematique). Ceci a ete
realise via l'adaptation de l'algorithme aux bond graphs couples (systemes
complexes). Par consequent, notre contribution est celle de permettre la
surveillance des systemes complexes avec les bond graphs couples ( 5.12).
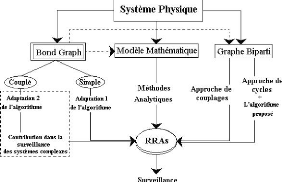
FIG. 5.12 -- Schema qui situe notre contribution en surveillance
par les bond graphs
M
M
M*

Symbol's 2000

6.0
C
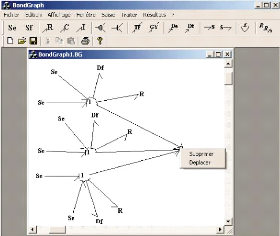
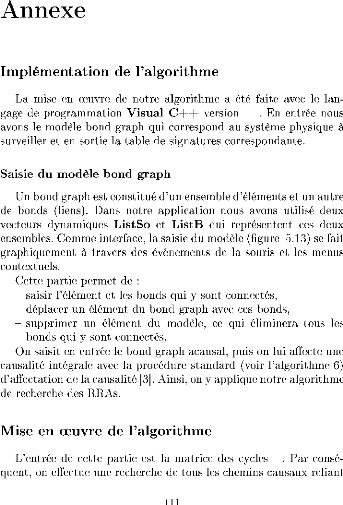
FIG. 5.13 -- Interface de saisie du modele bond graph
0 1 TF GY
R
I C
I C
R
C
C

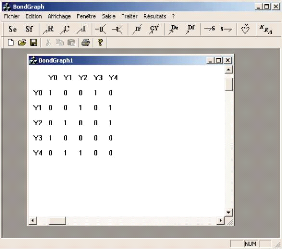
FIG. 5.14 -- Interface d'affichage de la matrice des cycles
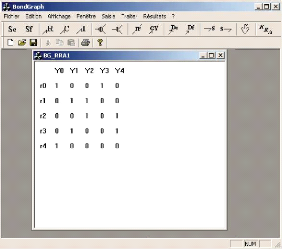
FIG. 5.15 -- Interface d'affichage de la table de signatures
Bibliographie
[1] M. BelaIguid. Generation des relations de redondance
analytique (rra), 2005. Universite d'oran, Es-Senia. Institut
d'Informatique.
[2] C. Berge. Graphes. 3eme edition, Paris, Editions
gauthiervillars, 1983.
[3] P. Borne, G. Dauphin-Tanguy, J.P. Richard, F. Rotella,
and I. Zambettakis. Modelisation et identification des processus, Tome 2.
Editions technip, Paris, 1992.
[4] B. Ould Bouamama. Model builder for thermo-fluid systems
using a bond graph and functional modelling. 13th European Simulation
Symposium, ESS01, pages 822-826,2001. Marseille, France.
[5] B. Ould Bouamama. Modelisation et supervision des systemes
en genie des procedes - approche bond graphs, 2002.
[6] B. Ould Bouamama. Design of supervision platforms based
on bond graph theory. ON-LINE DIAGNOSIS SCHEDULING OPERATION SUPPORT FOR
INDUSTRIAL PROCESSES, line FRANCE, 2004.
[7] B. Ould Bouamama, G. Dauphin-Tanguy, and M. Staroswiecki.
Integration des modeles externes et bond graphs pour la supervision des
processus en genie des procedes. Journee d'etudes de diffusion
technologique. Instrumentation et traitement du signal et des images, Dans les
procedes agroalimentaires et biotechnologiques, 2002. Ecole centrale de
Nantes.
[8] B. Ould Bouamama, G. Dauphin-Tanguy, M. Staroswiecki, and
D. Del Amo Bravo. Bond graph analysis of structural fdi properties in
mechatronics system. 1st IFAC Conference on mechatronic systems. Vol. 3.
IFAC. Darmsdadt, Germany, 2000.
[9] P. C. Breedveld. Multibond elements in physical systems
theory. Special issue of journal of Franklin Institute, pages 1-36,
1985.
[10] Brow and F. T. Direct application of the loop rule to
bond graphs. Journal of Dynamics Systems, Measurement and Control,
pages 253-261, 1972.
[11] F. Busson and B. Ould Bouamama. Monitoring of steam
generator using a bond graph approach. Symposium On Power Plant and Power
Systems Control, 2000. Brussels, Belgium.
[12] M. Combacau. Commande et surveillance des systemes a
evenements discrets complexes : application aux ateliers flexibles. PhD
thesis, Universite P.Sabatier de TOULOUSE, 1991.
[13] M. Combacau, P. Berruet, P. Charbonnaud, and A. Khatab.
Reflexions sur la terminologie surveillance - supervision. http
://www.laas.fr/ combacau/SPSF/sursup. html, 2000.
[14] C. Combastel. Methodes d'aide a la decision pour la
detection et la localisation de defauts dans les entrainements electriques.
PhD thesis, INPG, 2000.
[15] C. Cussenot. Surveillance et diagnostic de la chaine
de depollution d'une automobile. PhD thesis, Universite de Rennes 1,
1996.
[16] G. Devauchelle. Diagnostic mecanique des fatigues
sur les structures soumises a des vibrations en ambiance de travail. PhD
thesis, Universite de Paris IX Dauphine, 1991.
[17] A. Evsukoff. Raisonnement approche pour la surveillance
des procedes. PhD thesis, INPGrenoble, 1998.
[18] A. Golynski and J.D. Horton. A polynomial time algorithm to
find the minimal cycle basis of a regular matroid. ?, 2001.
[19] M. Gondron and M. Minoux. Graphes et Algorithmes.
3eme edition, Paris, Editions Eyrolles, 1995.
[20] H. Haffaf, B. Ould Bouamama, and M. Staroswiecki.
Structural analysis and fdi : A cycle approach. soumis a Automatica, 2004.
[21] R. Isermann. Process fault diagnosis based on modelling and
estimation methods-a survey. Automayica, pages 387-404, 1984.
[22] R. Isermann and P. Bane. Terminology in the field of
supervision, fault detection and diagnosis. http
://w3.rte-technik.tudarmstadt.de/institut/terminology.en.html, 2003.
[23] R. Izadi-Zamanabadi. Fault detection and isolation using
analytical redundancy relations for the ship propulsion benchmark. Technical
report, LAIL URA 1440D, University of sciences and technologies of Lille,
France, 1998.
[24] R. Izadi-Zamanabadi and M. Blanke. Structural analysis
for diagnosis - the matching problem revisited. Proceedings of 15th IFAC
World Conferences, Barcelona Spain, 2002.
[25] R.C. Karnopp and S. Azerbaijani. Pseudo bond graphs for
generalised comportemental models in engineering and physiologie. Journal
of the Franklin Institute, pages 95-108, 1981.
[26] R.C. Karnopp, D. Margolis, and R. C. Rosenberg.
System Dynamics : A unified Approach. 2nd edition, J.Willey editions,
1990.
[27] P. Kubiak. Analyse symbolique des systemes physiques
par bond graph et comportant des elements multiports. PhD thesis,
Universite des Science et Technologies de Lille, 1996.
[28] F. Z. Lebbah. Affectation de la causalite aux bond
graphs acausaux avec mrcap et pses. Universite d'Oran. Es-Senia.
Departement d'informatique, 1999. Memoire de fin d'etudes en vue de
l'obtention du diplOme : Ingenieur d'Etat en Informatique.
[29] FZ. Lebbah and H. Haffaf. Surveillance et bond
graphs-nouvel algorithms de generation de relations de redondance analytique.
Colloque International MOAD'2004, Saida, Algerie, 2004.
[30] D. Lefebvre. Contribution a la modelisation des systemes
dynamiques a evenements discrets pour la commande et la surveillance, 2000.
[31] L.TROMP. Surveillance et diagnostic de systemes
industriels complexes : une approche hybride numerique/symbolyque. PhD
thesis, Universite de Rennes, Ecole Doctorale : Science Pour
l'Ingenieur, 2000.
[32] Didier MAQUIN. Diagnostic a base de modeles des systemes
technologiques, 1997. Institut National de Lorraine,Ecole doctorale IAE#177;M,
DFD Automatique.
[33] S. Ploix and S. Giuliani. Glossaire des termer
usuels du diagnostic de defauts. http ://www-
lag.ensieg.inpg.fr/ploix/glossaire/DiagnosticGlossaire.htm.
[34] H. Poulard. Statistiques et reseaux de neurones pour un
systeme de diagnostic. Application au diagnostic de pannes automobiles.
PhD thesis, LAAS/France, 1996.
[35] Hector E. Rubio Scola. Information criteria for residual
generation and fault detection and isolation. Technical report, Publication
interne n 1008, Institut fr Recheche en Informatique et Systemes Aleatoires,
1996.
[36] Hector E. Rubio Scola. Detection signal for failure
detection and isolation for linear dynamic systems. Technical report, Rapport
de recherche n 3935L URA 1440D, Universidad Nacional de Rosario, Argentina,
1998.
[37] M. Tagina. Application de la modelisation bond graph
a la surveillance des systemes complexes. PhD thesis, University des
Science et Technologies de Lille, 1995.
[38] M. Tagina, JP. Cassar, G. Dauphin-Tanguy, and M.
Staroswiecki. Monitoring of systems modelled by bond-graphs.
ICBGMS95. International Conference on Bond Graph
Modelling. Las Vegas, 1995.
[39] Tako and F.Lootsma. Observer-based Fault Detection
and Isolation for nonlinear systems. PhD thesis, Department of control
engineering. Alborg University, 2001.
[40] J. U. Thoma and B. Ould Bouamama. Modelling and
Simulation in Thermal and Chemical Engineering . bond Graph Approach.
Springer Verlag, 2000.
[41] A.K.A. Toguyeni. Surveillance et diagnostic en ligne
dans les ateliers flexibles de l'industrie manufacturiere. PhD thesis,
Universite de Lille, 1991.
[42] P. Vismara. Union of all minimum cycle bases of graph.
The electronic journal of combinatorics, 1997.
[43] P. Weber. Diagnostic de procedes par l'analyse des
estimations parametriques de modeles de representation a temps discret.
PhD thesis, INPG, 1999.
[44] Mohamed Ryad ZEMOURI. Contribution a la surveillance
des systemes de production a l'aide des reseaux de neurones dynamiques :
Application a la e-maintenance. PhD thesis, L'UFR des sciences et
techniques de l'Universite de Franche Comte, 2003.
[451 Q. Zhang. Identification et Surveillance de systemes
Dynamiques, Habilitation a diriger les recherches. PhD thesis, Universite
de Rennesl, Institut de Formation Superieure en Informatique et en
Communication, 1999.
Table des figures
|
1.1
|
Architecture generale d'un systeme de supervision en
|
|
|
ligne
|
8
|
|
1.2
|
Classification des methodologies de la surveillance in-
|
|
|
dustrielle
|
13
|
|
1.3
|
Classification des methodologies de la surveillance in-
|
|
|
dustrielle
|
14
|
|
2.1
|
Redondance materielle double
|
22
|
|
2.2
|
Redondance materielle double
|
23
|
|
2.3
|
Redondance materielle et analytique
|
24
|
|
2.4
|
Structure generale de generateurs de residus
|
35
|
|
3.1
|
Exemple d'un systeme physique
|
43
|
|
3.2
|
Couplage dans un graphe quelconque
|
47
|
|
3.3
|
Couplage maximum d'un un graphe biparti
|
48
|
|
3.4
|
Couplage maximum sur le graphe structurel d'un sys-
|
|
|
teme physique
|
49
|
|
3.5
|
Le processus du couplage
|
50
|
|
3.6
|
Le graphe triparti (Le couplage maximal est marque
|
|
|
par des lignes epaisses)
50
|
|
|
3.7
|
Decomposition canonique du systeme en sous-systemes
|
|
|
sous-, juste- et sur-determines
|
53
|
|
3.8
|
Graphe triparti (a)couplage maximal (b)cycles . . . .
|
54
|
|
4.1
|
Les differentes formes d'un bond
|
58
|
|
4.2
|
Representation des bonds avec le flux et l'effort . . .
|
58
|
|
4.3
|
Representation du flux et de l'effort dans les domaines
|
|
|
electrique et mecanique
|
59
|
|
4.4
|
Representation de l'element R dans le bond graph . .
|
60
|
|
4.5
|
Representation de l'element C dans le bond graph . .
|
60
|
0
1
TF
GY
C I
C I
R
0
1
I R
1-5-5-1
4-3-6-6-3-4
C I C C C I
MP
MP
MP
MP
MP
MP MP

| 

