Chapitre III : Modélisation booléenne des
règles d'association - 49 -
4eme étape : Transformation
|
Règle
|
Prémisse
|
Conclusion
|
|
Rt1
|
aceA-2=1
|
pstS-3=1
|
|
Rt2
|
asd=1
|
rpsG=1, aroK=1
|
|
Rt3
|
aceA-2=1, phhB=1
|
argC=1
|
Seme étape : Production du graphe
d'induction
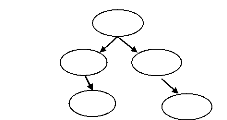
nul
pstS-3=1
s0
aceA-2
s2 s1
asd
phhB
argC=1
S4
rpsG=1, aroK=1
s3
6eme étape : Production des règles
cellulaires ( Rci )
O Génération des règles cellulaires
Rc1 : Si {s0 } Alors
{pstS-3=1, s1 }
Rc2 : Si {s0 } Alors {nul,
s2 }
Rc3 : Si {s1 } Alors
{argC=1, s3 }
Rc4 : Si {s2 } Alors {rpsG=1,
aroK=1, s4 }
O Représentation des règles cellulaires
Les règles cellulaires extraites à partir du graphe
(5eme étape) sont
représentées par les couches CELFAIT et CELREGLE et les matrices
d'E/S.
Les couches cellulaires de l'automate cellulaire
CASI
(1) La couche CELFAIT (2) La couche CELREGLE
REGLES
Rc1
Rc2
Rc3
Rc4
Chapitre III : Modélisation booléenne des
règles d'association - 50 -
(3) La matrice d'incidence d'entrée
RE(relation d'entrée)
|
RE
|
Rc1
|
Rc2
|
Rc3
|
Rc4
|
|
s0
|
1
|
1
|
0
|
0
|
|
pstS-3=1
|
0
|
0
|
0
|
0
|
|
s1
|
0
|
0
|
1
|
0
|
|
nul
|
0
|
0
|
0
|
0
|
|
s2
|
0
|
0
|
0
|
1
|
|
argC=1
|
0
|
0
|
0
|
0
|
|
s3
|
0
|
0
|
0
|
0
|
|
rpsG=1
|
0
|
0
|
0
|
0
|
|
aroK=1
|
0
|
0
|
0
|
0
|
|
S4
|
0
|
0
|
0
|
0
|
(4) La matrice d'incidence de sortie RS(relation de
sortie)
|
RS
|
Rc1
|
Rc2
|
Rc3
|
Rc4
|
|
s0
|
0
|
0
|
0
|
0
|
|
pstS-3=1
|
1
|
0
|
0
|
0
|
|
s1
|
1
|
0
|
0
|
0
|
|
nul
|
0
|
1
|
0
|
0
|
|
s2
|
0
|
1
|
0
|
0
|
|
argC=1
|
0
|
0
|
1
|
0
|
|
s3
|
0
|
0
|
1
|
0
|
|
rpsG=1
|
0
|
0
|
0
|
1
|
|
aroK=1
|
0
|
0
|
0
|
1
|
|
S4
|
0
|
0
|
0
|
1
|
|
Pour CELFAIT
A l'état initial :
|
|
|
|
|
Si cellule (i) base de faits initiale : fait déjà
établi
|
Alors
|
EF(i)=1.
|
|
Si
|
cellule (i) 0 base de faits initiale : fait à
établir
|
Alors
|
EF(i)=0.
|
|
Si
|
un fait est du type attribut = valeur
|
Alors
|
IF(i)=1.
|
|
Si
|
un fait est du type sommet
|
Alors
|
IF(i)=0.
|
Pour CELREGLE
Si cellule(i) =1 Alors Ri candidate i.e. participe à
l'inférence
Si cellule(i) =0 Alors Ri non candidate i.e. ne participe pas
à l'inférence Pour la matrice d'entrée RE :
Si faiti ? à Prémisse de Rj Alors RE(i,j)
=1
Pour la matrice de sortie RS :
Si faiti ? à Conclusion de Rj Alors RS(i,j) =1
III.4 La dynamique du moteur d'inférence
cellulaire
La dynamique de l'automate cellulaire CIE, pour simuler le
fonctionnement d'un Moteur d'Inférence, utilise deux fonctions de
transitions äfact et
ärule, où äfact
correspond à la phase d'évaluation, de sélection et de
filtrage, et ärule correspond à la phase
d'exécution.
(1) Évaluation, sélection et filtrage (application
de äfact )
(EF, IF, SF, ER, IR, SR)
|
DEFGH
IJJK (EF, IF, EF, ER + (Ri
· EF), IR, SR)
|
|
(2) Exécution (application de
ärule ) (EF, IF, SF, ER, IR, SR)
|
DSTUV
IJJK (EF + (Rs
· ER), IF, SF, ER, IR, ER
|
)
|
| 

