Chapitre II : Gisement solaire et le
générateur photovoltaïque
2- Les traqueurs actifs: en cas de mise en
mouvement par des éléments électromécaniques,
emploient les commandes électriques ou hydrauliques pour déplacer
le traqueur.
Type de commande
Beaucoup de travaux ont été menés sur les
stratégies de commande des trackers solaires dans le cas des modules PV
ou CPV. Trois grandes catégories de stratégies se
dégagent, la troisième, hybride étant une combinaison des
deux premières, dites stratégie en boucle ouverte et en boucle
fermée [14].
Commande en boucle ouverte
La commande dite en boucle ouverte (Figure III.5) est une
commande active de poursuite basée uniquement sur des calculs
astronomiques de la position du soleil (calcul
d'éphémérides), sans mesure de la position du soleil. En
fait, elle permet de générer les consignes de la trajectoire de
poursuite du tracker (dans notre cas l'angle d'azimut et
l'élévation) à partir de l'heure et des coordonnées
GPS d'une centrale. Comme toute commande en boucle ouverte, elle est
très sensible aux perturbations (absence de feedback) et aux erreurs de
modélisation.

Fig. III. 5 Commande en boucle ouverte d'un tracker PV
*141.
Commande en boucle fermée
La commande en boucle fermée est une commande active
qui se base sur une mesure de l'erreur de poursuite réelle pour
contrôler les actionneurs du tracker. Cette mesure de l'erreur (Figure
III.6) est fournie généralement par un capteur solaire, aussi
appelé viseur solaire. Dans certains cas, le retour n'est pas une erreur
de poursuite mais une puissance produite par le module.
En effet, cette stratégie consiste à orienter
les trackers suivant la position du tracker le mieux orienté, en partant
de n'importe quelle position (position aléatoire).
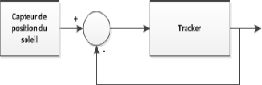
Fig. III. 6 Commande en boucle fermée d'un tracker
*141.
Commande hybride
La commande hybride est une commande de poursuite qui combine
le calcul de la position de référence proposée par la
« boucle ouverte », et la donnée de retour proposée par
la commande à boucle fermée.
Commande tenant compte de la
consommation
Tracker Solaire Page 33
Chapitre II : Gisement solaire et le
générateur photovoltaïque
Les stratégies de commandes présentées
précédemment ont un seul objectif qui est la maximisation de
l'ensoleillement, et donc de la production, sans tenir compte de l'état
de fonctionnement des actionneurs ni de leur consommation d'énergie.
Le principe de la commande, comme illustré par la
figure III. 7, est le suivant : le tracker reste en arrêt jusqu'à
ce que l'écart entre la position (théorique) du soleil et la
position du tracker atteigne un certain seuil de tolérance ("Initial
tolérance"). A ce moment, le tracker rattrape la position du soleil et
prend de l'avance ("Final tolérance").
Fig. III. 7 Génération de trajectoire
discontinue [14].
Degrés de liberté de mouvement 5.3.1.
Traqueurs Mono axiaux :
Suiveur Mono-axiaux disposent d'un seul degré de
liberté et tournent autour d'un seul axe.Le plan de ce type de traqueur
est incliné à un angle de latitude de lieu dirigé en plein
sud et l'angle de suivi égal à l'angle horaire
[5](Figure III. 8).

Fig. III. 8 Traqueur à un seul axe avec angle
d'inclinaison de Latitude *5].
5.3.2. Traqueurs Bi axiaux :
Ils disposent de deux degrés de liberté
grâce auxquels l'axe perpendiculaire aux panneaux photovoltaïques
est aligné parfaitement et en temps réel avec les rayons du
soleil, au détriment en revanche d'une plus grande complexité de
construction [5].
1- Traqueur équatorial
Dans ce type de traqueur, le panneau est incliné par
l'angle local (latitude), et l'angle de
suivi de cet axe tourne avec un angle égal à
l'angle horaire (Figure III. 9).
L'angle de suivi du deuxième axe tourne avec un angle
égal à l'angle de
. La variation horaire de l'angle de déclinaison est
considérée très lente ; par conséquent
l'orientation de ce dernier peut être ajustée une ou plusieurs
fois par saison [5].
Tracker Solaire Page 34
| 

