|
Université Sidi Mohamed Ben Abdellah
Faculté
des Sciences et Techniques Fès
Département Génie Electrique
|
|
|
|
|


Mémoire de Projet de
fin
d'étude
Préparé par
Samira BOUJENANE
Pour l'obtention du diplôme
Tracker Solaire Page 1
Master Sciences et Techniques
Electronique,
Signaux et Systèmes
Automatisés
(E.S.S.A)
Intitulé

Tracker solaire
Encadré par :
Pr Hassan EL MOUSSAOUI
Mr Abdellatif GHENNIOUI (Green Energie Park)
Soutenu le 14 Juin 2017, devant le jury composé
de :
Pr Hassan EL MOUSSAOUI : Encadrant
Mr Abdellatif GHENNIOUI : Encadrant
Pr Hassane EL MARKHI .: Examinateur
Pr Ali AHAITOUF : Examinateur
Pr Najia ES-SBAI : Examinatrice
Dédicace
Tracker Solaire Page 2
Je dédie ce modeste travail à :
À mes très chers
parents, Mohamed et Tifa que
dieu les garde et les protège pour leurs soutien moral et financier,
pour leurs encouragements et les sacrifices qu'ils ont endures.
À mes chers
Frères Rachid et
Azzeddine. À mes chères
Soeurs Fatima et
Oumaima.
À tous mes chères
Amis.
À tous les
Amis (es) d'études surtout ceux de master ESSA
promotion 2017. À tous les Gens que je
connais.
Remerciement
Tracker Solaire Page 3
Remerciement
Le projet de fin d'études auquel j'ai été
initié a été une expérience intellectuellement
utile et humainement motivante. Rien de cela n'aurait été
possible sans ceux qui ont partagé avec moi leur savoir, leurs efforts
et qui m'ont permis d'éviter les difficultés par leurs bons
conseils.
Ce stage a été effectué au centre de
recherche IRESEN (Green Enegy Park). Au cours de ces travaux, j'ai
été encadré par Monsieur GHENNIOUI Abdellatif, directeur
de la division modélisation, je tiens à le remercier pour bien
voulu m'accueillir comme stagiaire dans sa division, pour la qualité du
sujet de recherche qu'il m'a proposé, pour m'avoir fait
bénéficier de ses connaissances scientifiques, ses conseils et
son énorme aide.
J'adresse mes vifs remerciements à Hassan EL
MOUSSAOUI Professeur à la Faculté des Sciences et Techniques
de Fès, pour son encadrement, ses clairs conseils, j'ai beaucoup appris
en travaillant avec lui, sa disponibilité aussi pour la confiance et la
compréhension qu'il m'a manifestée, je le remercie
également de m'avoir supporté pendant la durée du
stage.
C'est également avec plaisir que je remercie les
membres du jury le professeur H. EL MARKHI, A. AHAITOUF et Madame N.
ES-SBAI, je mesure à leur juste valeur le temps qu'ils m'ont
accordé.
Mes vifs remerciements à tous les enseignants qui ont
contribué à ma formation du primaire à
l'université, à ceux qui ont marqué ma formation
électrique.
Un immense merci aux membres de l'équipe de Green
Energie Park qui j'ai eu l'opportunité d'embêter, en particulier
Monsieur Abdellah El Hassani El Alaoui pour sa rigueur scientifique et
les conseils judicieux qu'il m'a prodigués pour l'élaboration de
ce travail, je lui remercie également pour sa disponibilité et sa
gentillesse toute la durée de mon stage.
Je souhaite remercier tous mes amis de master ESSA avec qui
j'ai partagé d'agréables moments au cours de ces dernières
années.
Merci également à tous les collègues avec
lesquelles j'ai effectué mon stage (Zemmouri Med Noor, DAHR
Fatima Ezzahra et Oumaima EL ALANI) de leurs encouragements et
les bons moments qu'on a passés ensemble, une chance énorme de
vous avoir connu à vous tous.
Je ne peux pas finir mes remerciements sans rendre un grand
hommage à AZEROUAL Mohamed et EL KARKRI Yassir pour
leurs conseils et leur énorme aide.
Enfin, je remercie tous ceux qui ont contribué de
près ou de loin à la concrétisation de ce travail.
Merci aux lecteurs de ce rapport.
Tracker Solaire Page 4
Remerciement
Résumé
Dans l'optique de maximisation de la production des panneaux
solaires d'une part, et de réduction des coûts d'installation en
facilitant la maintenance et l'entretien des trackers d'autre part, ce travail
se focalise sur l'amélioration de la précision et la
réduction du coût de la stratégie de
génération de la trajectoire du tracker. Un modèle du
tracker à deux axes a été développé en trois
parties: une modélisation mécanique sous SolidWorks, un
modèle dynamique sous Matlab/Simulink et un modèle de commande.
Ainsi, l'analyse d'une nouvelle approche sans capteur s'appuyant sur un calcul
astronomique de la position de soleil a été effectuée, en
effet, la position du soleil varie d'une manière continue durant la
journée de l'Est vers l'Ouest selon l'axe azimutal (Est-Ouest), et aussi
pendant les saisons selon un axe zénithal (Nord-Sud).
Mots clés : Tracker à deux
axes, Modèle du tracker, SolidWorks, Matlab/Simulink, calcul
astronomique, l'axe azimutal, l'axe azimutal.
Abstract
In order to maximize the production of solar panels on the one
hand and reduce installation costs by facilitating the maintenance of trackers
on the other hand, this work focuses on improving Accuracy and reduction of the
cost of the tracker's tracking strategy. A two-axis tracker model has been
developed in three parts: a mechanical modeling under SolidWorks, a dynamic
model under Matlab / Simulink and a control model. Thus, the analysis of a new
approach without sensor based on an astronomical calculation of the position of
sun was carried out, in fact, the position of the sun varies in a continuous
way during the day from the East to the 'West along the azimuthal axis
(East-West), and also during the seasons along a zenithal axis
(North-South).
Key words: Two-axis tracker, Tracker model,
SolidWorks, Matlab / Simulink, astronomical calculation, azimuth axis, azimuth
axis.
Tracker Solaire Page 5
Résumé
Sommaire
Dédicace 2
Remerciement 3
Résumé/Abstract 4
Sommaire 5
Liste des figures 8
Liste des tableaux 10
Abréviations 10
Introduction générale 11
Chapitre I : Présentation de l'organisme d'accueil 13
1. Présentation de l'institution 13
2. La Structure D'IRESEN 14
3. Les grands projets pilotes de la plateforme : 15
Chapitre II : Gisement solaire et le générateur
photovoltaïque 16
1. Introduction 16
2. Aspects géométriques 16
2.1. Mouvement de la Terre autour du soleil 16
2.2. Trajectoire apparente du soleil 17
2.3. Coordonnées du soleil 17
2.4. Les coordonnées terrestres (géographiques)
19
2.5. Durée d'insolation 19
2.6. Le taux d'insolation 19
3. Aspects énergétiques 20
4. Énergie solaire : 23
4.1.1. Modélisation de la cellule
photovoltaïque 25
4.1.2. Le générateur photovoltaïque
et ses performances 25
4.1.3. Type et rendement des cellules
photovoltaïques 26
5. Conclusion 27
Chapitre III : Position du soleil & les trackers solaires
29
1. Introduction 29
2. L'intérêt des panneaux mobiles par rapport aux
panneaux fixes 29
3. Orientation et inclinaison d'une surface 30
4. Les points positifs et négatifs des suiveurs 31
Tracker Solaire Page 6
Sommaire
5. Les types des suiveurs 31
5.1. Mécanisme d'orientation (système de
positionnement) 31
5.2. Type de commande 32
5.2.1. Commande en boucle ouverte 32
5.2.2. Commande en boucle fermée 32
5.2.3. Commande hybride 32
5.2.4. Commande tenant compte de la consommation 32
5.3.1. Traqueurs Mono axiaux : 33
5.3.2. Traqueurs Bi axiaux : 33
6. Description du suiveur solaire : 34
7. Angle d'incidence sur un plan incliné(i) 35
8. Conclusion 35
Chapitre IV: Modélisation des trackers 36
1. Introduction 36
2. Modèle mécanique 36
2.1. Représentation du logiciel utilisé 37
2.1.1. Définition de la CAO 37
2.1.2. Outil CAO utilisé dans notre projet 37
2.2. Conception et Modélisation géométrique
du système 38
2.2.1. Description générale des systèmes
38
2.2.2. Système de poursuite 38
3. Modèle dynamique 39
3.1. Modèle du soleil 40
3.2. Modèle dynamique des actionneurs 42
3.2.1. Analyse des éléments 42
3.2.2. Vitesse de rotation du panneau 43
3.2.3. Le vent 44
3.2.4. Modèle de Capteur 45
3.3. Modélisation du moteur asynchrone 46
3.3.1. Modèle dynamique de la machine asynchrone 46
3.3.2. Modèle mécanique du tracker 48
3.3.3. Calcul de l'inertie du tracker azimut et
élévation 48
3.3.4. Relation entre la position angulaire et la course du
vérin 49
3.3.5. Estimation du couple résistant 50
Sommaire
3.3.6. Modélisation et simulation du modèle
dynamique 50
3.4. Commande scalaire 53
3.4.1. Contrôle en V/f de la machine asynchrone 54
3.4.2. Modélisation de l'onduleur triphasé 54
3.4.3. Les Techniques de commande de l'onduleur triphasé
56
3.4.4. La modulation de largeur d'impulsions 56
3.4.5. Modélisation de la commande scalaire 57
4. Commande et stratégie de génération de
trajectoire d'un tracker 59
5. Conclusion 59
Chapitre V : Test et simulation de la Commande du tracker 60
1. Introduction 60
2. Contexte logiciel 60
3. Écriture du programme 61
4. Description du HARDWARE 61
4.1. Réalisation de la commande de l'onduleur 61
4.1.1. Schéma de principe 61
4.1.2. Circuit de l'onduleur 62
4.1.3. Gâte drives circuit 62
4.2. Réalisation de la carte de commande du moteur
asynchrone 64
5.1.1. Étage de la puissance 64
5.1.2. Relai électromagnétique 64
4.3. Teste de la carte 65
5. Conclusion 65
Conclusion générale et Perspectives 66
Références 68
Annexes 70
Tracker Solaire Page 7
Tracker Solaire Page 8
Sommaire
Liste des figures
Chapitre 1 :
Fig. I. 1 Dessin schématique des principaux
contributeurs d'IRESEN. 13
Fig. I. 2 Modèle 3D de Green Energy Park. 14
Fig. I. 3 Structure D'IRESEN. 14
Chapitre 2 :
Fig. II. 1 Le mouvement de la Terre autour du soleil [4].
17
Fig. II. 2 Trajectoire du soleil [5]. 17
Fig. II. 3 Le plan équatorial de la terre avec l'angle
de Déclinaison solaire (ô) et Angle horaire .
18
Fig. II. 4 Le plan horizontal de la terre avec l'azimut du
soleil a et son élévation h. 19
Fig. II. 5 Coordonnées terrestre. 19
Fig. II. 6 Analyse spectrale du rayonnement solaire. 20
Fig. II. 7 Le rayonnement solaire et le nombre d'air masse.
20
Fig. II. 8 Types de rayonnement solaire reçus au sol
[6]. 21
Fig. II. 9 - a- Rayonnement solaire capté par un plan
horizontal et incliné [2]]. 23
Fig. II. 10 L'énergie émise par le soleil.
24
Fig. II. 11 Conversion de l'énergie solaire en
énergie électrique. 24
Fig. II. 12 Capacité mondiale d'énergie solaire
photovoltaïque [7]. 25
Fig. II. 13 Schéma équivalent électrique
d'une cellule PV [5] 25
Fig. II. 14 Courbes I(V) et P(V) d'un panneau
photovoltaïque [5]. 26
Fig. II. 15 Caractéristiques d'un
générateur photovoltaïque pour différents
éclairements [5]. 26
Chapitre 3 :
Fig. III. 1 Un panneau photovoltaïque fixe (a) et avec
système suiveur (b) [11]. 29
Fig. III. 2 Diagramme de comparaison entre la production avec
suiveur et la production avec
système fixe [5]. 30
Fig. III. 3 Les angles de l'inclinaison, de projection et de
l'incidence [5]. 30
Fig. III. 4 Exemple et fonctionnement du suiveur passif [13].
31
Fig. III. 5 Commande en boucle ouverte d'un tracker PV [14].
32
Fig. III. 6 Commande en boucle fermée d'un tracker
[14]. 32
Fig. III. 7 Génération de trajectoire
discontinue [14]. 33
Fig. III. 8 Traqueur à un seul axe avec angle
d'inclinaison de Latitude [5]. 33
Fig. III. 9 Traqueur à deux axes avec angle
d'inclinaison de Latitude [5]. 34
Fig. III. 10 Traqueur à deux axes
Azimut/Élévation [5]. 34
Fig. III. 11 Description de suiveur solaire [12]. 35
Chapitre 4 :
Fig. IV. 1 Modélisation d'un tracker PV et de son
command. 36
Fig. IV. 2 Le diagramme représentant les cinq
générations de systèmes de CAO [15]. 37
Fig. IV. 3 Le modèle mécanique
réalisé sous SolidWorks. 38
Fig. IV. 4 Description des différents
éléments du tracker. 39
Fig. IV. 5 Schéma synoptique du modèle de
tracker proposé. 40
Fig. IV. 6Angle d'Azimute et l'altitude en fonction du temps.
40
Tracker Solaire Page 9
Liste des figures
Fig. IV. 7 Le rayonnement reçu sur la surface d'un
panneau incline. 41
Fig. IV. 8 Comparaison entre l'Altitude/Azimut calculé
et mesuré. 42
Fig. IV. 9 Réducteur de roue et vis [18]. 44
Fig. IV. 10 La rose de vent de Ben Guerir 44
Fig. IV. 11 Élévation mesurée avec notre
inclinomètre [19]. 45
Fig. IV. 12 Moteur asynchrone [20]. 46
Fig. IV. 13 Modèle électromécanique
asservi du tracker. 47
Fig. IV. 14 Inertie du panneau (Elévation). 49
Fig. IV.15 Inertie du panneau (azimut). 49
Fig. IV.16 Schéma des paramètres de calcul.
49
Fig. IV.17 Modéle Interne du MAS. 51
Fig. IV. 18 Modèle en bloc Simulink de la MAS
alimentée en tension. 51
Fig. IV. 19 Le schéma interne de MAS modèle dq.
52
Fig. IV. 20 Les Résultats de la simulation du
démarrage à vide du moteur asynchrone. 53
Fig. IV. 21 Commande scalaire du moteur asynchrone [22] 54
Fig. IV. 22 Le schéma d'un onduleur triphasé
alimentant le MAS. 54
Fig. IV. 23 Schéma équivalent de l'onduleur.
55
Fig. IV. 24 Modèle de l'onduleur triphasé.
55
Fig. IV. 25 La sortie d'onduleur triphasé. 56
Fig. IV. 26 Modèle Simulink de la commande MLI. 57
Fig. IV.27 Le signal de sortie de la commande MLI. 57
Fig. IV.28 Modèle dynamique du MAS asservie en
position. 58
Fig. IV. 29 Les résultats de simulation. 58
Fig. IV. 30 Réponses indicielles d'un axe du tracker
asservi en position. 59
Chapitre 5 :
Fig. V. 1 Carte de commande d'un tracker solaire. 60
Fig. V. 2 Cheminement de la programmation et de la simulation
[1]. 61
Fig. V. 3 Circuit de commande d'un onduleur triphasé.
62
Fig. V. 4 L'onduleur triphasé avec trois bras. 62
Fig. V. 5 La structure du circuit tampon (BC547 et 2N3019).
63
Fig. V. 6 La structure de l'opto-isolateur. 63
Fig. V. 7 La structure de Darlington pair amplifiée
(TIP122). 64
Fig. V. 8 Connexion d'IR2112. 64
Fig. V. 9 Description d'un relais
électromagnétique. 64
Fig. V. 10 Les signaux PWM. 65
Les tableaux et Abréviations
Tracker Solaire Page 10
Liste des tableaux
Tableau 1 : Performance des différentes technologies des
cellules PV [8]. 27
Tableau 2 : les indicateurs statistiques 42
Tableau 3: Matrice de choix du moteur nature de la motorisation.
43
Tableau 4 : La comparaison entre les différents capteurs
de position [19] 45
Tableau 5 : Récapitulation de l'influence d'un PID
série sur le système. 47
Abréviations
MAS Moteur Asynchrone.
MLI Modulation de largeur d'impulsion.
AM Masse d'air.
PV Photovoltaïque.
TSV Temps solaire vrai.
MPPT Maximum power point tracking : recherche du maximum de
puissance.
PPM Point de puissance maximale
DNI Direct normal Irradiance : Ensoleillement direct.
GHI Global Horizontal Irradiance : Ensoleillement global.
DHI Diffus Horizontale Irradiance.
MSE Mean square error : Erreur quadratique moyenne.
PPM Point de puissance maximale.
RMSE Racine carrée de l'erreur quadratique moyenne.
TU Temps universels.
ET Équation du temps.
TL Temps légal.
TS-2 Tracker solaire à 2 axes.
CAO Conception Assistée par Ordinateur.
MCAO Mécanique Conception Assistée par
Ordinateur.
Tracker Solaire Page 11
Les tableaux et Abréviations

Introduction générale
Dans un contexte énergétique et
économique difficile, les attentes en termes d'énergies
renouvelables en général et d'énergie solaire en
particulier, sont de plus en plus importantes. Les enjeux majeurs des
chercheurs et des industriels dans ce domaine sont l'amélioration du
rendement et diminution des coûts des cellules, des modules et des
systèmes photovoltaïques afin de les rendre les plus
compétitifs possible.
Il y a deux manières pour maximiser le taux
d'énergie utile en optimisant la conversion et le degré
d'absorption, et en augmentant le taux de rayonnement d'incidence en employant
les systèmes d'orientation mécanique. Ces systèmes
appelés suiveurs solaires aussi « trackers » permettent
d'orienter les modules tout au long de la journée. Les systèmes
de suiveurs solaires sont utilisés pour plusieurs applications incluant
: les cellules solaires photovoltaïques, les concentrateurs solaires et
les télescopes.
Ce travail présente la conception et l'exécution
d'un algorithme de commande pour une structure mécanique à prix
réduit qui peut soutenir les modules photovoltaïques et qui agit en
tant que traqueur du soleil.
Plusieurs classes de structure peuvent être
distinguées selon les critères de classification. Concernant des
possibilités de mouvement, trois principaux types de traqueurs du soleil
existent: surfaces fixes, traqueurs un axe et traqueurs deux axes. La
différence principale parmi eux est la capacité de réduire
l'erreur d'orientation, en augmentant l'irradiation quotidienne que les
cellules solaires reçoivent et, ainsi, l'énergie
électrique qu'elles produisent. Notre projet a pour but d'étudier
un tracker solaire à deux axes.
Ce rapport est composé de cinq chapitres :
? Le premier chapitre est dédié à la
présentation de l'organisme d'accueil Green Energy Parck de Ben
Guérir, branche du centre de recherche IRESEN.
? Dans le chapitre 2, nous rappelons les
généralités sur l'énergie solaire
photovoltaïque ainsi que les principales caractéristiques de
fonctionnement d'un générateur PV à sa puissance
maximale.
? Dans le chapitre 3, nous présentons les
coordonnées astronomiques et les angles correspondants à la
trajectoire du soleil dans la sphère céleste pour repérer
sa position dans le ciel. Nous présentons aussi une méthode
algorithmique pour calculer cette position.
? Le chapitre 4, porte sur la conception du suiveur solaire et
son principe de fonctionnement. Une première partie, est
dédiée à la modélisation mécanique de la
structure du tracker générée sous le logiciel
SOLIDWORKS®. Une deuxième partie, est consacrée à la
modélisation dynamique sous Matlab/Simulink : le premier
élément de ce simulateur est un modèle de
génération des données atmosphériques et des
données théoriques de la position du tracker correspondant
à la trajectoire du soleil, le deuxième élément est
un modèle électromécanique du tracker asservi permettant
de calculer la position réelle du tracker en tenant compte du
comportement dynamique électrique de l'actionneur et du comportement
dynamique mécanique du tracker. Une troisième partie de ce
chapitre aborde la commande du tracker solaire à l'aide d'un
microcontrôleur.
Introduction générale
? Le chapitre 5 est consacré â la commande d'un
système du suiveur de soleil â deux axes et la
programmation du PIC sous mikroC et ISIS.
Tracker Solaire Page 12
Chapitre I : Présentation de l'organisme d'accueil

Chapitre I : Présentation de
l'organisme d'accueil
Tracker Solaire Page 13
Présentation de l'institution

IRESEN est un institut de recherche créé en 2011
par le Ministère de l'Énergie, des Mines, de l'Eau et de
l'Environnement et plusieurs acteurs clés du secteur de l'énergie
au Maroc (Figure I. 1) pour accompagner la stratégie
énergétique nationale en soutenant appliquée la recherche
et développement dans le domaine de l'énergie solaire et de
nouvelles énergies. C'est aussi la mission de l'organisme d'orienter les
grands axes de recherche et de financer les projets, qui sont pertinents. L'un
des succès les plus étonnants d'IRESEN a été le
développement du Green Energy Park.
Fig. I. 1 Dessin schématique des principaux
contributeurs d'IRESEN.
Green Energy Park est une plate-forme d'essai, de recherche et
de formation solaire couvrant une superficie totale de huit hectares
situés dans la ville verte de BenGuerir Il a été
développé par IRESEN (Institut de Recherche en Energie Solaire et
Energies Nouvelles) avec le soutien du Ministère de l'Énergie,
des Mines, de l'Eau et de l'Environnement le long du Groupe OCP (Figure I.
2).
Chapitre I : Présentation de l'organisme
d'accueil

Fig. I. 2 Modèle 3D de Green Energy Park.
Cette plate-forme de recherche (le premier de son genre en
Afrique) permet de réaliser deux objectifs principaux :
? Création de synergies et mise en commun des
infrastructures de recherche afin d'atteindre l'excellence ;
? Fournir aux différentes universités
partenaires ainsi qu'aux industriels les informations nécessaires sur
les panneaux solaires photovoltaïques ou thermiques.
La Structure D'IRESEN
La structure d'IRESEN est sur la figure I.3 suivante:

Fig. I. 3 Structure D'IRESEN.
Tracker Solaire Page 14
Chapitre I : Présentation de l'organisme d'accueil
Les grands projets pilotes de la plateforme
:

Centrale CSP (CHAMS1) : L'objectif du projet
CHAMS 1 est le développement d'un champ solaire thermodynamique nouvelle
génération, basse concentration et utilisant un champ solaire de
type Fresnel innovant [1].
Centrale PV : Installation d'une centrale
pilote photovoltaïque 120 - 200 kWc, utilisant 5 technologies
différentes pour la caractérisation des performances et
l'identification de la complémentarité des technologies
existantes sous les conditions climatiques marocaines [1].
Centrale SUNPOWER C7 : Installation d'une
nouvelle génération de CPV à basse concentration, pour
mettre en évidence les preuves de ce nouveau concept et pour comparer sa
performance à celle des technologies PV conventionnelle
[1].
Centrale HCPV : Mise en place d'un
système CPV à haute concentration combiné à un
système d'accumulateurs, pour l'étude et la
caractérisation de ses performances [1].
Tracker Solaire Page 15
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Tracker Solaire Page 16
Chapitre II : Gisement solaire

et le générateur
photovoltaïque
1. Introduction
Le gisement solaire est un ensemble de données
décrivant l'évolution du rayonnement solaire disponible au cours
d'une période donnée.
Le soleil est une source énergétique quasiment
illimitée, il pourrait couvrir plusieurs milliers de fois notre
consommation globale d'énergie [2]. C'est pourquoi,
l'homme cherche depuis longtemps à mettre à profit cette
énergie importante et diffusée sur l'ensemble de la
planète, il est arrivé à réaliser ce but par le
moyen dit cellule photovoltaïque.
Le nom photovoltaïque vient du grec, il est composé
de deux parties :
? Photos : Lumière.
? Volt : Unité de tension
électrique, du nom Alessandro Volta.
Aujourd'hui, grâce à sa fiabilité et
à son concept respectueux de l'environnement, le photovoltaïque
prend une place prépondérante.
Dans ce chapitre, nous allons rappeler quelques notions de
base sur la géométrie solaire, le rayonnement et l'énergie
solaire, ensuite une description du système photovoltaïque sera
donnée.
Aspects géométriques
Mouvement de la Terre autour du soleil
Le mouvement de la Terre autour du soleil s'effectue dans un
plan nommé le plan de l'écliptique. L'axe des pôles, autour
duquel s'effectue le mouvement de rotation de la Terre, n'est pas
perpendiculaire sur le plan de l'écliptique. Le centre de gravité
de la Terre décrit une ellipse dont le soleil occupe l'un des foyers
[3] (voir Figure II.1).
Les deux déplacements distincts de la terre (Figure
II.1).
? Le premier est une rotation de celle-ci autour de son axe en 24
heures.
? Le second est une rotation de la Terre autour du soleil en
365 jours 5h 48 min 40s 365,25 jours. Ce mouvement s'effectue dans le sens
trigonométrique et provoque le cycle des saisons
Tracker Solaire Page 17
Chapitre II : Gisement solaire et le
générateur photovoltaïque

Fig. II. 1 Le mouvement de la Terre autour du soleil [4].
Trajectoire apparente du soleil
Sur la figure II.2, les trajectoires et en même temps
les hauteurs du Soleil sont tracées pour tous les pays qui sont à
la même latitude. Plus on monte vers le Nord, plus le Soleil à son
lever, s'écarte de l'Est à l'époque des solstices. L'angle
que fait un point de l'horizon avec la direction du Sud s'appelle l'azimut
[5].
L'équateur céleste est pratiquement la ligne que
trace pour nous le Soleil dans le ciel, aux premiers jours du printemps et de
l'automne (appelés jours d'équinoxes).
L'observateur est ici face au Soleil couchant. Le parcours du
Soleil est le plus long au solstice d'été. Au solstice d'hiver,
en revanche, le parcours du Soleil est le plus court.

Fig. II. 2 Trajectoire du soleil [5].
Coordonnées du soleil
Pour un lieu donné, la position du soleil est
repérée à chaque instant de la journée et de
l'année par deux systèmes de coordonnées différents
[6].
Par rapport au plan équatorial de la terre (repère
équatorial).
Par rapport au plan horizontal du lieu (repère
horizontal).
- Coordonnées équatoriales
Le mouvement du soleil est repéré par rapport au
plan équatorial de la terre à l'aide de deux angles.
Déclinaison solaire (ô)
C'est l'angle que fait la direction du soleil avec sa
projection sur le plan équatorial (voir figure II.3). La
déclinaison du soleil varie quotidiennement selon la relation :
Chapitre II : Gisement solaire et le
générateur photovoltaïque
* * ( ) ( )++ E. 1
Avec :
J : le numéro du jour de l'année compté
à partir du 1er janvier, c.-à-d. varie de 1 à
365 ou 366 selon l'année
On dit que la déclinaison du Soleil est égale
à zéro lorsque la trajectoire du Soleil suit l'équateur
céleste. Cette déclinaison atteint +23.45° au début
de l'été, et -23.45° au début de l'hiver. C'est
l'écart que fait le Soleil avec l'équateur céleste
à l'époque des solstices.
Angle horaire du soleil C'est l'angle que fait la projection de
la direction du soleil avec la direction du méridien
du lieu, l'angle horaire du soleil varie à chaque instant
de la journée selon la relation (Figure. II.3):
( ) E. 2
( ) ( ) E. 3
(
( )) ( ( )) ( ( )) E. 4
( ) ( ) ( ) ( ) E. 5
Avec
TSV : temps solaire vrai,
TU: Temps universel c'est le décalage horaire
par rapport au méridien de Greenwich.
Pour le Maroc : TU= 0.
TL: Temps légal : temps donné par une montre.
At : correction de l'équation du temps.
: Longitude du lieu.
>0 : après midi.
<0 : le matin.
=0 : midi TSV.

|
x:
|
( )
- Coordonnées horizontales du soleil
|
Fig. II. 3 Le plan équatorial de la terre avec l'angle
de Déclinaison solaire (ä) et Angle
horaire??.
|
La position du soleil à un instant
considéré est donnée par l'azimut du soleil a et
son élévation h (voir figure II.5).
Azimut ( )
C'est l'angle que fait la projection du soleil sur le plan
horizontal avec la direction du Sud, l'azimut du soleil varie à chaque
instant de la journée selon la relation :
E. 6
Hauteur, Elévation ou l'altitude (h)
C'est l'angle vertical entre le plan horizontal et la direction
du soleil (Figure II. 4). La hauteur du soleil varie à chaque instant de
la journée et de l'année selon la relation suivante :
E. 7
La hauteur du soleil varie entre -90° et +90°.
h= 0 pour le plan horizontal (aux lever et coucher),
Tracker Solaire Page 18
|
Chapitre II : Gisement solaire et le générateur
photovoltaïque
|
|
|
h> 0 le jour,
h< 0 la nuit,
h = 90° pour le zénith.
L'azimut a: varie entre -180° et 180°.
On prend :
> 0 : vers l'ouest,
< 0 : vers l'est,
= 0 : direction du sud,
= 180° pour le Nord.
|
Fig. II. 4 Le plan horizontal de la terre avec
l'azimut
du soleil a et son élévation h.
Les coordonnées terrestres (ggpq)
Les coordonnées polaires terrestres portent les noms de
latitude (notée ö) et
longitudes (notée L) terrestres (Figure II.
5).
La latitude ö est une valeur angulaire, expression du
positionnement nord ou sud d'un point sur Terre, 4)varie de -90°
à 90° tel que: 4) > 0 vers le nord et 4) < 0
vers le sud.
La longitude L est une valeur angulaire, expression du
positionnement est ou ouest d'un point
sur Terre, L varie de -180° à 180° tel que :
L >0 à l'est du méridien de Greenwich & L<0 à
l'ouest du méridien de Greenwich.
Duré
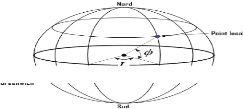
Fig. II. 5 Coordonnées terrestre.
.
La durée d'insolation représente la durée
maximale de la journée, entre le lever et coucher du soleil
Le temps du lever (sunset) du soleil est :
( --t9( 5) t9( p)) / 15 E. 8
Le temps du coucher (sunrise) du soleil est :
t = 12 + arcco ( --t9( ) t9( )) / 1 E. 9
vcoucner
Durée du jour :
( --t9( s) t9( 0)) E. 10
Le taux d'insolation
Le sol reçoit le rayonnement solaire maximal pendant la
durée de jours d'ensoleillement T (du lever au coucher du soleil) et par
ciel clair, mais la durée effective d'ensoleillement s d'une
journée ordinaire est inférieure à cette durée
maximale [3].
Le taux d'insolation est donné par l'expression
ci-après :
E. 11
Tracker Solaire Page 19
Tracker Solaire Page 20
Chapitre II : Gisement solaire et le générateur
photovoltaïque
Aspects énergétiques
3.1. Potentiel solaire
L'ensoleillement, qui représente le flux d'énergie
émit par unité de temps et par unité de surface du soleil,
exprimé en W/m est donné par la loi de Stefan-Boltzmann :
E. 12
Où a = 5.67 * 10-$ W/m2.
K4est la constante de Stefan-Boltzmann ;
T est la température absolue du corps noir.
L'ensoleillement reçu en dehors de l'atmosphère
terrestreE0, nommée la constante solaire et les mesures, par satellite,
indiquent que la valeur moyenne de l'année est de E0
=1367W/m.
L'ensoleillement extraterrestre sur une surface perpendiculaire
au faisceau du soleil dans le jour n de l'année est donné (n
variant de 1 à 365 et ce du 01/01 au 31/12 de l'année) par
l'équation suivante [2]:
(n) = (1 + 0.033 2365) E0 E. 13
3.2. Rayonnement solaire
Le rayonnement solaire est constitué de photons dont la
longueur d'onde s'étend de l'ultraviolet (0,2 um) à l'infrarouge
lointain (2,5 um).
3.3. Répartition spectrale du rayonnement
L'énergie associée à ce rayonnement
solaire comme l'indique la figure II. 6 se décompose approximativement
de :
- 9% dans la bande des ultraviolets (<0,4 um),
- 47% dans la bande visible (0,4 à 0,8 um),
- 44% dans la bande des infrarouges (>0,8 um).

Fig. II. 6 Analyse spectrale du rayonnement solaire.
3.4. Masse d'air
La masse d'air est définit comme une zone stable au
sens des paramètres physiques mesurés en son sein, et c'est le
rapport entre l'épaisseur d'atmosphérique traversée par le
rayonnement direct pour atteindre le sol et l'épaisseur traversée
à la verticale du lieu [6].
Chapitre II : Gisement solaire et le générateur
photovoltaïque
3.5. Composition du rayonnement solaire
Le rayonnement solaire sur une surface au sol est composé
comme suit (Figure II. 8) [2]:

Fig. II. 8 Types de rayonnement solaire reçus au sol
[6]. - Rayonnement direct DHI
C'est la fraction du rayonnement solaire qui arrive directement
au sol.
E. 14
Avec
h: hauteur du soleil.
J: Rayonnement direct d'une surface normale
n
J = J E. 15
n [ +0.0 *c s( *')+
0 = 1367
- Rayonnement diffus DNI
Le rayonnement diffus est le rayonnement provenant de toute la
voûte céleste.
- Rayonnement réfléchi (L'albédo)
Le rayonnement solaire réfléchi est le rayonnement
qui est réfléchi par le sol ou par des objets se trouvant
à sa surface. Ce rayonnement dépend de l'albédo du sol
[6].
E. 16
- Rayonnement global GHI Une
surface horizontale
C'est l'ensemble du rayonnement d'origine solaire qui parvient
sur une surface horizontale. Il comprend deux types de rayonnements directs et
diffus.
Une surface inclinée
Rayonnement global sur une surface inclinée est la
somme des rayonnements :Direct, diffus et réfléchi.
Tracker Solaire Page 21
Tracker Solaire Page 22
Chapitre II : Gisement solaire et le
générateur photovoltaïque
3.6. Calcul du rayonnement solaire
Rayonnement solaire direct sur un plan horizontal
[3]
DHI,h = F*sin(h) [ ] E. 17
Avec
h : est la hauteur angulaire du soleil,
F : est le flux incident reçu sur une surface face aux
rayons solaires et peut être évalué.
Par :
F = Esol × exp(TL /(0.9 + 9.4sin(h))) [ ] E. 18
Avec
Esol= 1370
TL le facteur de trouble de Linke défini comme suit :
TL = 2.4 + 14.6B + 0.4(1+2B)ln(Pv) E. 19
Où B est le coefficient de trouble atmosphérique
qui prend une des valeurs :
B = 0.02 pour un lieu situé en montagne
B = 0.05 pour un lieu rural
B = 0.10 pour un lieu urbain
B = 0.20 pour un lieu industriel (atmosphère
polluée)
Pv est la pression partielle de vapeur d'eau, qui se calcule par
:
Pv = Pvs×HR E. 20
Avec Pvs la pression de vapeur saturante, HR le taux moyen
d'humidité relative et :
Pvs = 2.165 (1.098 + T/100)^8.02 E. 21
Où T est la température de l'air en °C.
Rayonnement diffus sur un plan horizontal
Le rayonnement solaire diffus sur un plan horizontal peut
être déterminé par [3] :
DNI,h= 54.8 vsin(h) × (T - 0.5 - vsin(h) ) E. 22
Où TL est le facteur de trouble de Linke calculé
par la formule.
Rayonnement solaire direct sur un plan incliné
Le rayonnement direct est celui qui traverse l'atmosphère
sans subir de modifications, il est possible de l'estimer par la formule
suivante [3] :
DHI,i= F × CI E. 23
CI étant le coefficient d'orientation,
c'est l'angle formé par le rayonnement solaire avec la perpendiculaire
d'une surface. Ce coefficient est défini d'une part par la hauteur du
soleil (h) et son azimut (a) et d'autre part par l'orientation (o) et
l'inclinaison (??) du plan récepteur. L'orientation (o) est
négative vers l'Est, positive vers l'Ouest et nulle vers le sud.
Le calcul du coefficient d'incidence CI est obtenu par la formule
suivante :
CI= (sin(??)cos(h) cos(o - a)
cos(??)sin(h)) E. 24
Rayonnement diffus sur un plan incliné
Le rayonnement solaire diffus D arrive sur le plan
récepteur incliné après avoir été
diffusé par les particules solides ou liquides en suspension dans
l'atmosphère, il n'a pas de
Tracker Solaire Page 23
Chapitre II : Gisement solaire et le
générateur photovoltaïque
direction privilégiée, de ce fait, l'orientation du
plan (l'azimut) n'a pas d'importance, seule son inclinaison en a.
Ainsi sur un plan récepteur d'inclinaison (f.?), DNI se
calcule [3] :
DNI,i =125 X sin(h)^0.4((1+ cos(f.?)) / 2) + 211.86 X
sin(h)^1.22 ((1-cos(f.?)) / 2) E. 25
Le rayonnement diffus pour un plan incliné fixe est un cas
particulier du rayonnement diffus pour un plan incliné mobile,
l'inclinaison (f.?) doit être prédéfinie.
Rayonnement réfléchi sur un plan incliné
La composante réfléchie, Gr est donnée par
la relation suivante [3]:
Gr = ñX GHI (1 - cos(â)/2) E. 26
Où ñ représente l'albédo et â
l'inclinaison du champ PV.
3.7. L'intensité du rayonnement solaire
L'intensité du rayonnement solaire reçu sur un
plan quelconque à un moment donné est appelée irradiation
ou éclairement (noté généralement par la lettre G),
il s'exprime en watts paramètre carré ( w/m2).
La valeur du rayonnement reçu par la surface du module
photovoltaïque varie selon la position de ce dernier. Le rayonnement
solaire atteint son intensité maximale lorsque le plan du module
photovoltaïque est perpendiculaire aux rayons [2].
Dans la figure. II.9 ci-après est illustré
l'effet de l'inclinaison des modules photovoltaïques sur
l'intensité de l'éclairement reçu sur leurs surfaces du
lever au coucher du soleil.

Fig. II. 9 - a- Rayonnement solaire capté Fig. II. 9 -
b- Intensité de l'ensoleillement reçu
par un plan horizontal et incliné [2]. sur un
plan horizontal et incliné [2].
Énergie solaire :
L'énergie solaire est la fraction de l'énergie
électromagnétique provenant du soleil et parvenant à la
surface de la Terre, après filtrage par l'atmosphère terrestre
(Figure II. 10).
Tracker Solaire Page 24
Chapitre II : Gisement solaire et le
générateur photovoltaïque

Fig. II. 10 L'énergie émise par le
soleil.
Les techniques pour capter une partie de cette énergie
(énergie absorbée par la terre) sont disponibles et sont
constamment améliorées. On peut distinguer le solaire passif, le
solaire photovoltaïque et le solaire thermique.
? Le type qui nous intéresse c'est l'énergie
solaire photovoltaïque. L'énergie solaire
photovoltaïque
L'énergie solaire photovoltaïque provient de la
conversion de la lumière du soleil en électricité au sein
de matériaux semi-conducteurs comme le silicium ou recouverts d'une
mince couche métallique.
Ces matériaux photosensibles ont la
propriété de libérer leurs électrons sous
l'influence d'une énergie extérieure. C'est l'effet
photovoltaïque. L'énergie est apportée par les photons
(composants de la lumière) qui heurtent les électrons et les
libèrent, induisant un courant électrique. Ce courant continu de
micro-puissance calculé en watt crête (Wc) peut être
transformé en courant alternatif grâce à un onduleur
(Figure II.11).

Fig. II. 11 Conversion de l'énergie solaire en
énergie électrique. Évolution de
l'utilisation de l'énergie solaire
Au cours de la dernière décennie,
l'énergie solaire PV a monté son énorme potentiel. La
quantité de puissance PV installée a rapidement augmenté.
Actuellement, la puissance PV installée à l'échelle
mondiale est d'environ 227 GW. La figure II.12 montre la puissance PV
installée cumulée.
Tracker Solaire Page 25
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. II. 12 Capacité mondiale d'énergie solaire
photovoltaïque [7]. Les panneaux solaires
Modélisation de la cellule photovoltaïque
Une cellule PV peut se modéliser à partir de
l'équation définissant le comportement statique de la jonction PN
d'une diode classique. Ainsi, la figure.1.2 illustre le schéma
équivalent électrique d'une cellule PV réelle. Dans cette
équation, on prend en compte le courant de court-circuit et les
différentes résistances modélisant les pertes dues
à la connectique. Ainsi, en statique, le comportement d'une cellule PV
constituée d'une jonction PN à base de silicium peut être
décrit par l'équation suivante [5]:
f exp(VCELL+ICELLRS)l
VCELL+ICELLRS E. 27
L
MIT J Rp
Avec :
Où IsAT est le courant de
saturation, VT le potentiel thermo dynamique, K la
constante de Boltzmann, T la température effective de la cellule en
Kelvin, e la charge de l'électron, n le facteur de non
idéalité de la jonction, ICELL est le
courant fourni par la cellule, VCELL la tension
à ses bornes, Iccle courant de court-circuit
de la cellule dépendant de l'éclairement et la
température, Rp la résistance shunt
caractérisant les courants de fuite de la jonction et
Rs la résistance série représentant les
diverses résistances des contacts et de connexions.
La figure II. 13 montre la schématique adoptée
pour une cellule PV élémentaire.
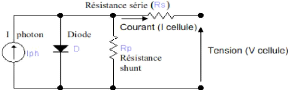
Fig. II. 13 Schéma équivalent
électrique d'une cellule PV *5].
Le générateur photovoltaïque et ses
performances
Un générateur photovoltaïque ou module est
constitué d'un ensemble des cellules photovoltaïques
élémentaires montés en série et/ou parallèle
afin d'obtenir des caractéristiques électriques
désirés tels que la puissance, le courant de court-circuit
(Icc) ou la tension en circuit ouvert (V.
O.
Tracker Solaire Page 26
Chapitre II : Gisement solaire et le
générateur photovoltaïque
? Caractéristiques courant tension
La figure II. 14 ci-dessous montre la caractéristique
courante tension d'un panneau photovoltaïque typique dans des conditions
constantes d'irradiation et température.
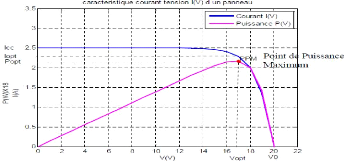
Fig. II. 14 Courbes I(V) et P(V) d'un panneau
photovoltaïque [5]. ? L'influence de l'éclairement :
La figure II.15 présente un exemple des courbes pour
différents niveaux de rayonnements :

Fig. II. 15 Caractéristiques d'un
générateur photovoltaïque pour différents
éclairements [5].
On remarque que la valeur du courant de court-circuit est
proportionnelle à l'intensité du rayonnement. Par contre, la
tension en circuit ouvert ne varie pas dans les mêmes proportions, elle
reste quasiment identique même à faible éclairement.
L'irradiation standard, internationalement acceptée, pour mesurer la
réponse des panneaux photovoltaïques est l'intensité
rayonnante de 1000 w/m2 et une température de
25°C.
Type et rendement des cellules photovoltaïques
Il existe différents types de cellules solaires, et
chaque type de cellules à un rendement qui lui est propre. Cependant,
quel que soit leur type, leur rendement reste assez faible : de 8 à 23%
de l'énergie qu'elles reçoivent [2].
Dans le tableau 1, ci-dessous on résume les
différentes performances des technologies des cellules
photovoltaïques :
Tracker Solaire Page 27
Chapitre II : Gisement solaire et le générateur
photovoltaïque
Tableau 1 : Performance des différentes technologies
des cellules PV [8].

Les avantages et les inconvénients de
l'énergie PV
- Avantages
? L'énergie photovoltaïque peut être
installée partout, même en ville.
? L'énergie photovoltaïque est renouvelable et
gratuite.
? Sur les sites isolés, l'énergie
photovoltaïque offre une solution pratique pour obtenir de
l'électricité à moindre coût.
? Les systèmes photovoltaïques sont fiables : aucune
pièce employée n'est en mouvement.
Les matériaux utilisés (silicium, verre, aluminium)
résistent aux conditions
météorologiques extrêmes.
? L'énergie photovoltaïque est totalement modulable
et peut donc répondre à un large
éventail de besoins. La taille des installations peut
aussi être augmentée par la suite pour
suivre les besoins de son propriétaire.
- Inconvénients
? Le coût d'investissement des panneaux
photovoltaïques est élevé.
? Le rendement électrique diminue avec le temps (20% de
moins au bout de 20 ans).
? Les panneaux contiennent des produits toxiques et la
filière de recyclage n'est pas encore
existante.
? Lorsque le stockage de l'énergie électrique par
des batteries est nécessaire, le coût du
système photovoltaïque augmente.
? Le rendement réel de conversion d'un module est
faible.
Conclusion
Dans ce chapitre nous avons présenté des
généralités sur la technologie photovoltaïque. Les
technologies PV actuelles permet de transformer directement le rayonnement
solaire en
Chapitre II : Gisement solaire et le
générateur photovoltaïque
électricité avec un taux de conversion d'environ
15%. L'amélioration du rendement des systèmes
photovoltaïques PV dépend du rayonnement absorbé par les
panneaux solaire.
Afin que le rayonnement solaire soit perpendiculaire au
panneau solaire, il est nécessaire de recourir à la technique de
poursuite du soleil. Ainsi on se propose dans le chapitre suivant
d'étudier la position du soleil et les systèmes de poursuite
`'solar traker» pour maximiser l'énergie produite par les cellules
PV.
Tracker Solaire Page 28
Tracker Solaire Page 29
Chapitre II : Gisement solaire et le
générateur photovoltaïque

Chapitre III : Position du soleil &
les trackers solaires
1. Introduction
La puissance électrique produite par un panneau
photovoltaïque dépend fortement de l'ensoleillement et à un
degré moins important de la température des cellules. Ces deux
variables influençant sur le comportement du système et
présentent des fluctuations quotidiennes et saisonnières. Pour
ces raisons, un dispositif de contrôle devra être
intégré dans le circuit de commande. Ce dernier doit être
capable de faire fonctionner le panneau photovoltaïque à sa
puissance maximale. On peut distinguer 2 techniques de suivi ou
"Tracking"[9]:
1- La méthode de MPPT
(Maximum Power Point Tracking) est basée sur
l'utilisation d'un algorithme de recherche du maximum de la courbe de puissance
du panneau photovoltaïque.
2- Systèmes de poursuite solaire (sun tracking
systems) qui permettent d'orienter les panneaux solaires tout au long
de la journée pour mieux exploiter les cellules photovoltaïques. En
effet, beaucoup de travaux centrent leur intérêt sur la poursuite
du soleil afin de maximiser l'ensoleillement en gardant la surface active du
module solaire perpendiculaire aux radiations solaires
[10].
L'intérêt des panneaux mobiles par
rapport aux panneaux fixes
Au cours de la journée, le soleil se déplace
continuellement, alors qu'un générateur photovoltaïque est
fixe dans sa position, perdant ainsi une considérable quantité
d'énergie, qui pourrait être disponible.
Lorsqu'un panneau photovoltaïque est fixe par rapport au
sol et orienté vers le sud (implantation en hémisphère
nord), son rendement énergétique n'est pas constant au cours de
la journée : en début et en fin de journée, le mauvais
angle d'éclairement du panneau diminue le rendement de la production
électrique.
Lorsqu'un système suiveur oriente le panneau solaire en
le faisant pivoter en direction du soleil et en maintenant en permanence un
angle d'incidence des rayons idéal, voisin de 9Ø°,
la production électrique par m2 de panneau atteint alors son
maximum [11] (Figure III. 1).

Fig. III. 1 Un panneau photovoltaïque fixe (a) et avec
système suiveur (b) [11].
Le diagramme comparatif de production électrique
(Figure III. 2) montre pour une journée ensoleillée
d'été, le gain de production électrique obtenu en passant
d'une installation fixe à une installation équipée.
Tracker Solaire Page 30
Chapitre II : Gisement solaire et le
générateur photovoltaïque
Au cours d'une journée complètement
ensoleillée, un système fixe de 1 kW bien orienté, produit
5,5 kWh d'énergie, alors que le même système avec suiveur,
dans les mêmes conditions d'ensoleillement, produit 11 kWh
d'énergie.

Fig. III. 2 Diagramme de comparaison entre la production
avec suiveur et la production avec système fixe [5].
Orientation et inclinaison d'une
surface
3.1. Angle d'inclinaison du panneau
L'angle d'inclinaison (Figure III. 3)
est l'angle entre le panneau et le plan horizontal, il
vérifié
la condition suivant [5]: ??
3.2. L'angle d'incidence
L'angle d'incidence (Figure III. 3)
est l'angle qui se trouve entre le rayon du soleil et
la normale de la surface du plan, il est donné par
l'équation suivante [3]:
( ) (??) ( ) ( ) (??) ( ) E. 28
Avec :
i: L'angle d'incidence.
â: L'inclinaison du plan récepteur
h: La hauteur du soleil
á: l'azimut du plan récepteur
a: l'azimut solaire
: Angle de la projection horizontale d la normale au palan
considéré avec N-S.
??: Angle de la normal au plan considéré
avec le plan horizontal.

Fig. III. 3 Les angles de l'inclinaison, de projection et
de l'incidence *5].
Le rendement en puissance solaire exploitée peut
être calculé à l'aide de l'équation suivante :
Tracker Solaire Page 31
Chapitre II : Gisement solaire et le
générateur photovoltaïque
( 9) *100 E. 29
La valeur de B qui donne le meilleur rendement c'est B =90 .
Les points positifs et négatifs des
suiveurs
- Avantages
? + 40 % de production à surface de panneaux solaires
égale
? Augmente le nombre de cas d'implantation quand les solutions
classiques ne sont pas possibles
? Peut valoriser les espaces de terrains perdus
- Inconvénients
? Le principal inconvénient des traqueurs solaires est
leur faible résistance aux vents. En effet, ceux-ci se replient lorsque
le vent atteint des vitesses supérieures à 11.11-13.88 m/s.
? Nécessité d'un permis communal
? Encombrant. Demande un grand terrain
? Risque de panne du suiveur
Les types des suiveurs
La stratégie de commande d'un tracker consiste
essentiellement à générer la trajectoire du tracker afin
de poursuivre parfaitement le soleil dans le but de maximiser la production. En
effet, l'asservissement des actionneurs des trackers est
généralement considéré comme maitrisé et
n'est par conséquent pas abordé.
Cette stratégie de commande peut avoir d'autres
objectifs et d'autres contraintes comme la minimisation de l'énergie
consommée, l'adaptation aux variations des conditions
météorologiques.
Les traqueurs solaires peuvent être divisés en
deux types principaux selon le type de la commande et de la sensibilisation ou
du système de positionnement qu'ils incorporent [5]
[12].
Mécanisme d'orientation (système de
positionnement)
1- Les traqueurs passifs: en cas de mises en
mouvement par des phénomènes physiques autonomes, emploient le
rayonnement des soleils pour chauffer gaz qui déplace le traqueur
à travers le ciel utilisé, ne nécessitant pas
d'énergie électrique (Figure III.4).
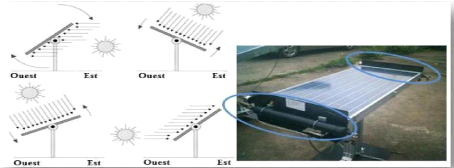
Fig. III. 4 Exemple et fonctionnement du suiveur passif
[13].
Tracker Solaire Page 32

Chapitre II : Gisement solaire et le
générateur photovoltaïque
2- Les traqueurs actifs: en cas de mise en
mouvement par des éléments électromécaniques,
emploient les commandes électriques ou hydrauliques pour déplacer
le traqueur.
Type de commande
Beaucoup de travaux ont été menés sur les
stratégies de commande des trackers solaires dans le cas des modules PV
ou CPV. Trois grandes catégories de stratégies se
dégagent, la troisième, hybride étant une combinaison des
deux premières, dites stratégie en boucle ouverte et en boucle
fermée [14].
Commande en boucle ouverte
La commande dite en boucle ouverte (Figure III.5) est une
commande active de poursuite basée uniquement sur des calculs
astronomiques de la position du soleil (calcul
d'éphémérides), sans mesure de la position du soleil. En
fait, elle permet de générer les consignes de la trajectoire de
poursuite du tracker (dans notre cas l'angle d'azimut et
l'élévation) à partir de l'heure et des coordonnées
GPS d'une centrale. Comme toute commande en boucle ouverte, elle est
très sensible aux perturbations (absence de feedback) et aux erreurs de
modélisation.

Fig. III. 5 Commande en boucle ouverte d'un tracker PV
*141.
Commande en boucle fermée
La commande en boucle fermée est une commande active
qui se base sur une mesure de l'erreur de poursuite réelle pour
contrôler les actionneurs du tracker. Cette mesure de l'erreur (Figure
III.6) est fournie généralement par un capteur solaire, aussi
appelé viseur solaire. Dans certains cas, le retour n'est pas une erreur
de poursuite mais une puissance produite par le module.
En effet, cette stratégie consiste à orienter
les trackers suivant la position du tracker le mieux orienté, en partant
de n'importe quelle position (position aléatoire).
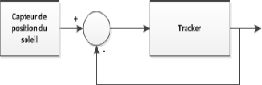
Fig. III. 6 Commande en boucle fermée d'un tracker
*141.
Commande hybride
La commande hybride est une commande de poursuite qui combine
le calcul de la position de référence proposée par la
« boucle ouverte », et la donnée de retour proposée par
la commande à boucle fermée.
Commande tenant compte de la
consommation
Tracker Solaire Page 33
Chapitre II : Gisement solaire et le
générateur photovoltaïque
Les stratégies de commandes présentées
précédemment ont un seul objectif qui est la maximisation de
l'ensoleillement, et donc de la production, sans tenir compte de l'état
de fonctionnement des actionneurs ni de leur consommation d'énergie.
Le principe de la commande, comme illustré par la
figure III. 7, est le suivant : le tracker reste en arrêt jusqu'à
ce que l'écart entre la position (théorique) du soleil et la
position du tracker atteigne un certain seuil de tolérance ("Initial
tolérance"). A ce moment, le tracker rattrape la position du soleil et
prend de l'avance ("Final tolérance").
Fig. III. 7 Génération de trajectoire
discontinue [14].
Degrés de liberté de mouvement 5.3.1.
Traqueurs Mono axiaux :
Suiveur Mono-axiaux disposent d'un seul degré de
liberté et tournent autour d'un seul axe.Le plan de ce type de traqueur
est incliné à un angle de latitude de lieu dirigé en plein
sud et l'angle de suivi égal à l'angle horaire
[5](Figure III. 8).

Fig. III. 8 Traqueur à un seul axe avec angle
d'inclinaison de Latitude *5].
5.3.2. Traqueurs Bi axiaux :
Ils disposent de deux degrés de liberté
grâce auxquels l'axe perpendiculaire aux panneaux photovoltaïques
est aligné parfaitement et en temps réel avec les rayons du
soleil, au détriment en revanche d'une plus grande complexité de
construction [5].
1- Traqueur équatorial
Dans ce type de traqueur, le panneau est incliné par
l'angle local (latitude), et l'angle de
suivi de cet axe tourne avec un angle égal à
l'angle horaire (Figure III. 9).
L'angle de suivi du deuxième axe tourne avec un angle
égal à l'angle de
. La variation horaire de l'angle de déclinaison est
considérée très lente ; par conséquent
l'orientation de ce dernier peut être ajustée une ou plusieurs
fois par saison [5].
Tracker Solaire Page 34
Chapitre II : Gisement solaire et le
générateur photovoltaïque

Fig. III. 9 Traqueur à deux axes avec angle
d'inclinaison de Latitude *5].
2- Traqueur azimut/élévation
L'idée consiste à la rotation de l'axe autour de
zénith avec un angle de rotation égal à l'angle d'azimut,
tandis que l'autre axe est parallèle à la surface de la Terre et
tourne avec un angle de rotation égale à l'angle d'altitude
(Figure III.10).
Les traqueurs d'altitude/azimut emploient des données
ou des algorithmes astronomiques de position du soleil pour déterminer
la position du soleil pendant n'importe quelles heures et endroits
donnés. Le lieu, la date et le temps de traqueur sont saisis par un
contrôleur pour fixer la position du soleil.

Fig. III. 10 Traqueur à deux axes
Azimut/Élévation [5].
L'avantage principal de ce système est que la position du
soleil peut être déterminée indépendamment de la
couverture de nuage.
En outre, des variations saisonnières de la position du
soleil sont prises en considération.
Description du suiveur solaire :
Le système de poursuite se compose essentiellement de deux
parties (Figure III. 11) :
Chapitre II : Gisement solaire et le
générateur photovoltaïque

Fig. III. 11 Description de suiveur solaire [12].
La partie commande ou programmation
Cette partie apte à traiter les informations de
position du soleil et les transmettent aux actionneurs pour effectuer la
poursuite du soleil, détecter les anomalies de fonctionnement et
effectuer les opérations de mise en sécurité de
l'équipement [12].
Il assure, aussi, d'autres fonctions, dont :
? Le contrôle des mouvements mécaniques du
système en limitant les angles de rotation à
partir des fins de courses (0° à 200° sur
l'horizontal et 0° à 90° sur la verticale) ;
? L'orientation du panneau en fin de journée vers la
position de départ ou de démarrage du système.
La partie opérative ou
électronique
Cette partie repose sur des systèmes qui permettent la
réception des ordres envoyés par le calculateur, leur conversion
en signaux électriques et leur transmission au système
mécanique articulé, ainsi que l'activation du monteur
(vérin). Cette opération assure que le rayonnement solaire soit
toujours perpendiculaire au panneau.
Angle d'incidence sur un plan
incliné(i)
L'expression de l'angle incidence est [14] : cos
= ?
On trouve :
cos = sin sin cos ?? sin cos .sin ?? cos + cos cos cos ?? cos +
cos sin
cos ?? cos + cos sin sin E. 30
Cas particuliers :
? Capteur orienté plein sud ( = 0) :
cos = sin sin( ??) + cos cos cos( ??)
? Pour un captage
annuel de type (?? = )
cos = cos .cos
? Pour une incidence parfaite (cas d'un système de
poursuite du soleil) = 0.
Conclusion
Le système de poursuite solaire consiste à
contrôler le mouvement de rotation du panneau et le commander par un
programme informatique pour mettre la normale du collecteur face au soleil
pendant toute la journée.
L'importance de ce système est de capter le rayonnement
solaire parallèle venant directement du disque solaire (rayonnement
direct). Donc nous obtenons une nette amélioration du niveau de
l'éclairement solaire et un meilleur rendement du système tout au
long de l'année en utilisant ce système.
Tracker Solaire Page 35
Tracker Solaire Page 36
Chapitre II : Gisement solaire et le
générateur photovoltaïque

Chapitre IV: Modélisation des
trackers
1. Introduction
La modélisation d'un tracker diffère selon
l'objectif d'utilisation. Il existe des modèles de prédiction de
la production d'un tracker et d'une centrale PV sur trackers. Ces
modèles utilisent une régression linéaire et une
estimation de l'ensoleillement ainsi que l'historique des données
météorologiques (ensoleillement direct, ensoleillement
global...).
On obtient aussi un modèle basé sur la
réponse spectrale de la cellule multi-jonctions III-V. Ces
modèles, destinés plutôt à des centrales CPV,
permettent de prédire la production sur un mois ou sur une année
en fonction des modules utilisés et du lieu de la centrale
[13]. Par contre ces modèles ne sont pas
dédiés à tester, ni à simuler et valider les
commandes ou les stratégies de commande des trackers, car ils se basent
sur un suivi parfait du soleil. Ce manque de travaux concernant la
modélisation physique comportementale des trackers a redirigé nos
recherches vers des modèles de trackers PV classiques. Malgré les
différences de comportement et de caractéristiques, ces
modèles de trackers PV peuvent présenter une base pour le
développement d'un modèle de tracker.

Dans l'optique de caractérisation du comportement
dynamique des trackers en prenant en considération la performance du
suivi (de la commande), en effet ce modeste travail propose un modèle
géométrique et dynamique 3D de la structure mécanique et
la motorisation d'un tracker PV en tenant compte de sa commande de trajectoire.
Le modèle de conception du tracker contenant la structure
mécanique rigide et l'actionneur (moteur) a été
rédigé sous le logiciel «SolidWorks». Le modèle
dynamique du tracker est développé sous Matlab/Simulink. La
commande adoptée dans ce travail est une commande en boucle ouverte,
basée sur un calcul astronomique pour déterminer la position de
référence pour l'asservissement de position du moteur (Figure IV.
1).
Fig. IV. 1 Modélisation d'un tracker PV et de son
command.
2. Modèle mécanique
Le système mécanique comporte également
deux organes, le premier organe est une partie fixe et le deuxième qui
est mobile, les deux parties sont reliées par un mécanisme de
rotation (roulements).
Nous avons mis deux roulements l'un pour faire orienter la
partie mobile dont elle supporte le panneau horizontalement (azimutal), est le
deuxième est dédié au déplacement
Tracker Solaire Page 37
Chapitre II : Gisement solaire et le
générateur photovoltaïque
vertical (élévation). Nous avons ainsi
associé à chaque déplacement (horizontal/vertical) un
moteur asynchrone muni d'un vérin à déplacement
linéaire pour l'axe d'élévation.
2.1. Représentation du logiciel utilisé
La conception assistée par ordinateur CAO est devenue
un outil technologique puissant dans l'ingénierie moderne complexe et
multidisciplinaire.
Le travail présenté a pour objectif de la
conception et la modélisation géométrique
détaillée à l'échelle réelle (l'esquisse de
tous les composants, l'assemblage, la vérification et la simulation
d'animation) de structure du TS-2. Cette conception a été
réalisée par le logiciel de C.A.O SOLIDWORKS.
2.1.1. Définition de la CAO
Nous pouvons définir la CAO par l'ensemble des outils
logiciels et des techniques informatiques qui permettent d'assister les
concepteurs dans la conception et la mise au point d'un produit. Un logiciel de
CAO se compose généralement de quatre parties majeures qui
peuvent être organisées comme suit [15] (Figure
IV. 2) :
? Le modeleur géométrique: il
représente "la planche à dessin". Nous trouvons dans cette partie
les composants géométriques essentiels : points, droites,
cercles, ellipses, plans, sphères, cylindres, cônes, courbes de
Bézier ou B-Splines, surfaces NURBS, surfaces de révolution,
surfaces de balayage, etc. Il intègre également les composants
topologiques : sommets, faces, arêtes, orientations, coïncidences,
adjacences, intersections, soustractions, unions, etc.
? L'outil de visualisation.
? Un certain nombre d'applications: nous
retrouvons le calcul des grandeurs géométriques (distances,
inerties, volumes, masses, etc.), les fonctions métiers, assemblage de
pièces, production de plans, simulation d'usinage, moulage, fraisage,
etc.
? Un contrôleur: il gère et
manipule les intersections entre les trois outils cités
précédemment.

Fig. IV. 2 Le diagramme représentant les cinq
générations de systèmes de CAO [15]. 2.1.2.
Outil CAO utilisé dans notre projet
Dans ce travail nous avons choisi le logiciel CAO-SOLIDWORKS pour
développer la conception et la modélisation
géométrique du tracker.
Tracker Solaire Page 38
Chapitre II : Gisement solaire et le générateur
photovoltaïque
SOLIDWORKS est un logiciel 3D
Mécanique Conception
Assistée par Ordinateur (MCAO)
développé par SOLIDWORKS Corporation des
États-Unis. SOLIDWORKS Corporation a été fondé en
décembre 1993 par Jon Hirschtick. En juillet 1997, DASSAULT SYSTEM
rachète la société qui est détentrice de la licence
du produit et l'intègre dans l'univers DASSAULT. SOLIDWORKS est un
logiciel commercial largement utilisé dans la modélisation et
dans la conception des systèmes mécaniques assistée par
ordinateur [15].
2.2. Conception et Modélisation
géométrique du système 2.2.1. Description
générale des systèmes
La structure représentée sur la figure IV.3
possède deux degrés de liberté, la rotation horizontale
permet de suivre le mouvement du soleil tout au long de la journée. Le
déplacement vertical permet d'orienter la structure selon la
déclinaison saisonnière du soleil, pour permettre une exposition
maximale des modules PV au rayonnement solaire.

Fig. IV. 3 Le modèle mécanique
réalisé sous SolidWorks.
2.2.2. Système de poursuite
Les deux mouvements pour les deux systèmes de suiveur
sont assurés par deux dispositifs mécaniques de réduction
découplés.
Le premier mécanisme est un motoréducteur pour
l'entraînement en azimut (vertical), comportant, pour le mouvement
d'élévation est assuré par un vérin
mécanique d'actionnement électrique. Comme illustré sur la
figure IV. 4.
Tracker Solaire Page 39
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. IV. 4 Description des différents
éléments du tracker.
3. Modèle dynamique
Cette partie a pour objectif de tester le modèle
dynamique adaptée au tracker, essentiellement en termes de performance
de suivi qui résulte de la stratégie de commande
adoptée.
Une étude de l'évolution de la puissance
électrique consommée par les actionneurs du tracker doit
être menée en parallèle. La figure IV. 5 présente un
schéma descriptif de l'objectif du simulateur. Il s'articule autour du
modèle du tracker à deux axes (azimut et élévation)
contenant les sous modèles suivants :
? Un modèle du soleil, basé sur un calcul
astronomique, capable de calculer les positions
d'azimut et d'élévation (hauteur) (A, h)
théoriques, que le tracker doit viser, en fonction de l'heure et de la
date. Dans le contexte de cette étude, le résultat de ce calcul
est également utilisé comme position réelle du soleil pour
servir d'entrée au modèle des modules PV ((A, h) soleil = (A, h)
théorique).
? Un bloc de stratégie de commande du tracker qui sert
à calculer la position de référence du tracker servant de
consigne aux deux actionneurs.
? Un modèle dynamique de moto-variateur (les
actionneurs) asservi en position pour les axes d'élévation et
d'azimut.
? Un modèle mécanique du tracker est
implémenté afin de calculer la position réelle du tracker
en tenant compte des réducteurs de vitesses utilisés, des
inerties du tracker et des frottements estimés.
? Un modèle du capteur.
Tracker Solaire Page 40
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. IV. 5 Schéma synoptique du modèle de
tracker proposé.
Grâce à ses différents
sous-modèles, ce simulateur permet l'étude de l'influence de la
performance du suivi du soleil sur la production des modules PV.
3.1. Modèle du soleil
Le modèle du soleil proposé est un modèle
de génération de données. En effet, il est capable
d'estimer l'ensoleillement global et direct. Il permet aussi de calculer les
données de position théorique du soleil à viser par le
tracker. Les positions théoriques en élévation et azimut
((As, hs) théoriques), à viser par le tracker,
sont générées à partir d'un calcul astronomique en
fonction de l'heure, de la date et des coordonnées géographiques
du tracker (coordonnées GPS : (longitude et latitude). Les algorithmes
de calcul astronomique sont issus de la référence
[16].
a) Calcul des vecteurs de position solaire
(altitude/azimut)
Le schéma de la figure IV.6 illustre les variations
horaires du vecteur de la position solaire (Altitude/azimute) pendant une
journée d'été pour la ville de Ben Guerir (Figure IV. 6).
Nous voyons que la hauteur (altitude) du soleil à midi atteint
77°.


Fig. IV. 6Angle d'Azimute et l'altitude en fonction du
temps.
Les variations de la trajectoire
du soleil en vue du sens horizontal
(azimutale) sont considérées presque identiques
pendant les différentes périodes de l'année. Elles sont
d'une forme ligne droite.
b) Le rayonnement reçu sur la surface d'un panneau
incline
La figure IV.7 montre que le rayonnement reçu sur un
panneau est important cela veut dire que les rayons de la lumière sont
perpendiculaires à sa surface.
Tracker Solaire Page 41
Chapitre II : Gisement solaire et le
générateur photovoltaïque

Fig. IV. 7 Le rayonnement reçu sur la surface d'un
panneau incline. c) Méthode d'évaluation du
modèle
Les résultats de l'algorithme de calcul de la position
théorique du soleil ont été validés par comparaison
avec les données mesurées par la station de Green Energy Park
(Annexe 1).
Calcul statistique
Plusieurs indicateurs statistiques utilisés dans la
littérature vont nous permettre de
confronter les données obtenues par le modèle
développé et les données mesurées.
Les indicateurs utilisés sont :
RMSE, Racine carrée de l'erreur
quadratique moyenne.
v? ( ) E. 31
Avec n Nombre d'heures, c'est l'élévation
calculé et l'élévation mesuré.
La RMSE est une mesure de la variation des valeurs
calculées autour des valeurs mesurées, plus sa valeur est petite
et plus le modèle est meilleur.
MBE : Erreur de biais moyen.
La MBE donne une indication sur la déviation moyenne des
valeurs calculées par rapport aux valeurs mesurées. Une valeur
positive indique une sur estimation par contre une valeur négative
indique une sous-estimation.
( )
? E. 32
R2 : Coefficient de
détermination.
? ( ) ( )
E. 33
v? ( ) ? ( )
Avec hcmean: élévation moyenne
journalière calculée et hmmean est
élévation moyenne journalière mesurée.
L'indicateur R2 varie entre 0 et 1. Une valeur de 1 ou
proche de 1 indique un parfait accord entre la valeur mesurée et
calculée. Par contre, une valeur proche de 0 indique un total
désaccord.
Les indicateurs statistiques RMSE, MBE, R2 sont
résumés dans le tableau suivant.
Chapitre II : Gisement solaire et le générateur
photovoltaïque
|
Tableau 2 : les indicateurs statistiques
|
|
RMSE
|
17.3940
|
|
MBE
|
27.9243
|
|
ind_R2
|
0.33407
|
D'après ces calcules le RMSE calculée donne un
écart minimum donc les deux modèles sont proche. Le MBE donne une
valeur positive c.-à-d on a une sur estimation des valeurs
mesurées enfin la valeur du coefficient de détermination indique
un accord entre les valeurs mesurées et calculées.
Résultats de simulation
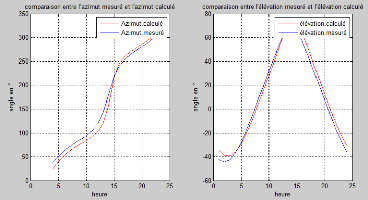
Fig. IV. 8 Comparaison entre l'Altitude/Azimut
calculé et mesuré.
Nous constatons d'après la figure IV.8 que les angles
de l'Altitude/Azimut du soleil calculés avec notre programme sont
très rapprochés de ceux donnés par la base des
données ce qui signifie la validité du programme
élaboré.
3.2. Modèle dynamique des actionneurs
Le système intégré complet inclut
généralement les éléments et composants suivants
:
? Moteurs électriques : moteurs électriques
à courant continu ou à courant alternatif pour conduire les
entraînements mécaniques, par le biais du courant, de la
fréquence ou du contrôle de la vitesse.
? Sous-système d'entraînement mécanique
transmission / actionneur : les actionneurs linéaires, les engrenages
à vis sans fin, les entraînements linéaires, les
entraînements dynamiques et les entraînements à engrenages
planétaires font partie du système de positionnement pour
déplacer le réflecteur face au soleil.
3.2.1. Analyse des éléments
Comme tous les systèmes automatisés, le tracker
nécessite des systèmes de motorisation offrant couple et vitesse
pilotable pour suivre le soleil. Afin de trouver un système de
motorisation adapté au tracker, une analyse des éléments
relatifs impactant ce système a été
réalisé.
Tracker Solaire Page 42
Chapitre II : Gisement solaire et le générateur
photovoltaïque
Le tableau 2 permet de visualiser très rapidement
l'ensemble des moteurs électriques disponibles, leurs principales
caractéristiques et leurs domaines d'emploi. Il faut souligner la place
tenue par les moteurs asynchrones à cage triphasée dont le
qualificatif de « standard » est de nos jours renforcé par une
parfaite adaptation à l'emploi consécutive au
développement des dispositifs électroniques qui autorisent la
variation de vitesse.
Tableau 3: Matrice de choix du moteur nature de la
motorisation.
|
Asynchrone à cage
Triphasé Monophasé
|
Asynchrone à bague
|
Synchrone
À rotor bobiné
|
Rotor terres
rares
|
Pas à pas
|
A courant
continu
|
|
TYPE DE
MOTEUR
|
|
Cout du moteur
|
Faible
|
|
Faible
|
Elevé
|
Elevé
|
Elevé
|
Faible
|
Elevé
|
|
Moteur étanche
|
Standard
|
|
Possible
|
Sur
demande, coûteux
|
Sur demande, coûteux
|
Standard
|
Standard
|
Possible
Très couteux
|
|
Démarrage
direct de sur le réseau
|
Aisé
|
|
Aisé
|
Dispositif de démarrage particulier
|
Impossible à
partir de
quelques KW.
|
Non prévu
|
Non prévu
|
Non prévu
|
|
Variation de
vitesse
|
Facile
|
|
Très rare
|
Possible
|
Fréquent
|
Toujours
|
Toujours
|
Toujours
|
|
Coût de la
|
De plus
|
en
|
Très
|
Economique
|
Très
|
Assez
|
Très
|
Très
|
|
solution
variation de
vitesse
|
plus
économique
|
|
économique
|
|
économique
|
économique
|
économique
|
économique
|
|
Performance en
variation de
vitesse
|
De plus
plus élevée
|
en
|
Très faible
|
Moyenne
|
Elevée
|
Très élevée
|
Moyenne à
élevée
|
Elevée à très élevée
|
|
Emploi
|
Vitesse constante variable
|
ou
|
En majorité, vitesse
constante
|
Vitesse
constante ou variable
|
Vitesse
constante ou
variable
|
Vitesse variable
|
Vitesse variable
|
Vitesse variable
|
|
Utilisation
|
Universelle
|
|
Pour les
|
En
|
Dans les
|
Machine
|
Positionnem
|
En
|
|
industrielle
|
|
|
petites puissances
|
diminution
|
grandes
puissances en
moyenne tension
|
outils, forte
dynamique
|
ent en
boucle
ouvert, pour
les petites
|
diminution
|
puissances
Tout d'abord, tous ces moteurs peuvent offrir une puissance
assez importante, supérieure à 1,2 kW. Comme nous voulons
diminuer le coût de maintenance sur 20 ans, les machines à courant
continu ne conviennent pas vraiment à l'utilisation de dans un
désert. Il faut également que l'entreprise achète
plusieurs moteurs il y a beaucoup d'argent à investir. Le coût est
donc un facteur déterminant dans le choix du moteur. D'après ces
caractéristiques, les machines asynchrones conviendront le mieux
à l'application.
3.2.2. Vitesse de rotation du panneau La vitesse de
rotation du panneau se calcule par la relation [1] :
L'angle d~azimut maximal (°)
ladureé dujour (h)
Nous avons besoin du nombre d'heures à partir du lever du
soleil jusqu'à son coucher. Ce
nombre est égal à 14 heures en été
et à 9 heures en hiver. Ainsi, nous avons pris la moyenne qui est
égale à 12h.
oJ (°/ ) = °= oJ( /s) = * =7.27* - oJ(tr/min) =
60*360 = 0.000694 E. 34
(tr/min)
(tr/min) E. 35
Rapport de réducti on = 2161383.2853
On obtient un rapport d'engrenage anormalement
élevé, parce qu'en règle générale, un
système de transmission de vitesse plus pratique et
réaliste pour le suivi solaire utilise un système de transmission
avec un rapport de réduction compris entre [18] 10 000
: 1 et 30 000 : 1.
Tracker Solaire Page 43
Chapitre II : Gisement solaire et le générateur
photovoltaïque
Le mouvement de rotation du pisteur solaire est normalement
plus rapide que la vitesse de rotation du soleil (0,000694 tr / min). C'est la
raison pour laquelle on utilise des systèmes de contrôle de suivi
solaire de type on / off pour synchroniser le mouvement de rotation angulaire
des actionneurs avec le mouvement du soleil (contrôle de suivi solaire
décrit dans le paragraphe 3.4).

D'après une étude faite par (Gerro Prinsloo,
Robert Dobson) [18] un réducteur roue vis sans fin a été
choisi avec une couronne pour assurer le bon rapport de réduction
(Figure IV. 9).

Fig. IV. 9 Réducteur de roue et vis [18].
L'absence de freins s'explique parce que la vis peut entrainer la
roue mais le roue ne peut pas entrainer la vis, ce qui est le plus grand
avantage d'un réducteur de roue et vis sans fin [19].
3.2.3. Le vent
De toutes les charges auxquelles les trackers solaires sont
exposés, le changement du vent est le plus important. Il provoque les
plus grandes forces de charge qui varient dans toutes les directions et peuvent
causer des dommages mécaniques ainsi qu'ils déstabilisent le
panneau solaire, ce qui réduit sa capacité à capter la
lumière du soleil efficacement.
Grâce à l'équipement de la station
météorologique de Green Energy Park (comme l'indicateur de pluie,
le capteur de pression / humidité et l'anémomètre - voir
Annexe 1), un énorme ensemble de données a été
collecté et transformé en une rose de vent dans la figure IV. 10
à l'aide d'un code Matlab.
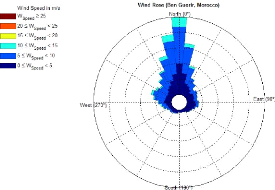
Tracker Solaire Page 44
Fig. IV. 10 La rose de vent de Ben Guerir.
Il semble que le vent le plus décontracté provient
du nord avec beaucoup moins d'intensité dans la partie nord-ouest de la
région. Cependant, il a également été prouvé
que la
Tracker Solaire Page 45
Chapitre II : Gisement solaire et le générateur
photovoltaïque
plus haute vitesse du vent, même si elle est
extrêmement rare, provient du Sud et atteint en Mars 2015 à
Mars2016 un maximum de 23.6 m/s.
3.2.4. Modèle de Capteur
? Dispositifs de sous-système de détection de
mouvement : encodeurs d'arbres linéaires ou rotatifs, capteurs
d'inclinaison, inclinomètres, photodiodes, résistances
photosensibles pour surveiller la position actuelle du plat pendant qu'il se
déplace jusqu'à la position désirée [18].
? Interrupteurs de fin de course : Dispositifs pour
empêcher un mouvement mécanique au-delà des limites
prédéfinies afin d'éviter les dommages au tracker ou au
câble [18].
? Dispositifs de détection ambiante environnementaux ou
atmosphériques : détection de l'intensité lumineuse,
solormètre, pyranomètre, capteur d'anémomètre /
vent, capteur de température ambiante, capteur d'humidité et
capteurs de pression atmosphérique pour détecter tout risque
environnemental ou menaçant pour l'environnement.
a) Connaître la position des modules
? La matrice (tableau 3) de choix pour la position des modules
(suivant l'élévation):
Tableau 4 : La comparaison entre les différents
capteurs de position [19].
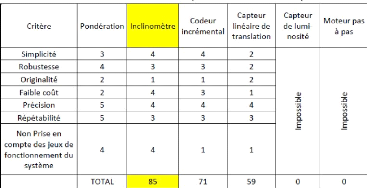
Les critères de répétabilité et de
précision sont très importants. En effet, on veut que notre
capteur soit précis et que la mesure soit repérable
(c'est-à-dire que l'on obtient toujours la même valeur).
La solution retenue pour l'élévation est un
inclinomètre. Ce capteur est très avantageux, car il permet de
mesurer directement l'élévation du panneau ce qui permet
d'atteindre de hautes précisions et de s'affranchir des défauts
de montage contrairement à une mesure indirecte qui doit prendre en
compte les jeux de fonctionnements (Figure IV. 11).

Fig. IV. 11 Élévation mesurée avec notre
inclinomètre [19]. ? Matrice de choix pour l'azimut
Chapitre II : Gisement solaire et le
générateur photovoltaïque
Inutile de faire une matrice de choix pour la solution. Pour
connaître l'angle de l'azimut de notre tracker, nous utiliserons un
codeur incrémental. C'est le seul capteur qui répond aux
critères [19].
3.3. Modélisation du moteur asynchrone
La machine asynchrone est composée de deux parties
séparées par un entrefer. Le stator ou l'inducteur : c'est la
partie fixe de la machine asynchrone comportant un enroulement triphasé
couplé en étoile ou en triangle. Le rotor ou l'induit : c'est la
partie tournante de la machine asynchrone. Ils sont (les rotors)
constitués d'un bobinage similaire à celui du stator fermé
sur un rhéostat extérieur via des bagues et des balais ; ou ils
sont de type à cage constitué de barres conductrices en
court-circuit. Ces derniers sont plus robustes et moins onéreux [20]
(Figure IV. 12).

Fig. IV. 12 Moteur asynchrone [20].
3.3.1. Modèle dynamique de la machine asynchrone
Un modèle dynamique basé sur des
hypothèses simplificatrices a été adopté, afin de
modéliser la machine asynchrone contrôlée en boucle ouverte
par un variateur de vitesse. Ce modèle prend en compte la conversion
électromécanique et les pertes de la machine. Cette
modélisation dynamique est adoptée afin de modéliser
correctement les régimes transitoires du système. Concernant la
commande, un contrôle scalaire est choisi pour se rapprocher au plus du
système.
Il existe plusieurs modèles de la machine asynchrone
triphasée dans la littérature. Ils sont basés sur les
équations générales décrivant le fonctionnement de
la machine, supposée en régime linéaire (machine non
saturée), dans un référentiel de Park d-q qui est obtenu
par la transformation du Park pour passer d'un modèle sur 3 axes fixes
à 2 axes tournants notés d et q.
Le modèle proposé par (Caron.J-P, 1995) [13] a
été choisi pour le développement du simulateur, car il est
facile à manipuler et possède un nombre raisonnable de
paramètres à identifier. En effet, ce modèle est
caractérisé par 4 paramètres électriques :
? La constante de temps rotorique Tr.
? Le coefficient de dispersion a.
? La résistance propre d'une phase statorique
Rs.
? L'inductance cyclique statorique Ls.
Le modèle électrique de la machine est donné
par l'équation suivante :
Tracker Solaire Page 46
? Remarque : L'opérateur ( ) est employé
comme notation de la dérivation appliquée aux
courants statoriques et rotoriques. Cette notation est reprise
de (Caron.J-P, 1995).Diverses formes du calcul du couple
électromagnétique sont proposées dans (Caron.J-P, 1995).
L'expression du couple de ce modèle est représentée comme
suit [13]:
Chapitre II : Gisement solaire et le générateur
photovoltaïque
( )( ) E. 37
Les coefficients p, Lr, M, isq
et isd sont respectivement le nombre de paires de pôles,
l'inductance cyclique rotorique, l'inductance mutuelle cyclique entre rotor et
stator et les courants statoriques dans le repère de Park. Les flux
rotoriques dans le repère de Park sont calculés à partir
des équations [13]:
( ) E. 38
( ) E. 39
La figure IV.13 présente les entrées et les
sorties du modèle dynamique de la machine asynchrone triphasée.
En effet, le modèle permet de calculer le couple
électromagnétique en fonction des tensions statoriques dans le
repère de Park, Vsd et Vsq, et des pulsations
statorique et rotorique ws et wr.

Fig. IV. 13 Modèle électromécanique
asservi du tracker.
La modélisation de la machine asynchrone
triphasée présentée ci-dessus est
précédée d'une modélisation du variateur de vitesse
et des transformations du repère triphasé au repère
diphasé puis au repère de Park. Ce modèle du variateur de
vitesse assure une commande scalaire pour la machine asynchrone. Pour le
système étudié (tracker de référence), la
vitesse de la machine asynchrone n'est pas asservie, mais simplement
contrôlée "en boucle ouverte".
La fréquence de consigne en entrée du
modèle provient d'un régulateur à actions
proportionnelles, intégrale et dérivée (PID). Les tensions
Vsd et Vsq ainsi que la pulsation statorique d'alimentation
sont obtenues après application de la transformation de Park. La
fonction de transfert, dans le domaine de Laplace, du régulateur PID,
assurant l'asservissement de position, est représentée par
l'équation [13]:
( ) ( ) E. 40
Le réglage de ces paramètres a été
effectué par la méthode empirique de Ziegler et Nichols ne
nécessitant pas une connaissance parfaite du modèle du
procédé à commander. En effet, cette technique de
réglage du régulateur a été retenue de
manière à obtenir des performances équivalentes à
celles du système pris pour référence.
Les paramètres du PID (tableau 4) influencent le
comportement du système de la manière suivante si l'on augmente
séparément l'action proportionnelle (P), intégrale (I) ou
dérivée (D)
[21].
Tableau 5 : Récapitulation de l'influence d'un PID
série sur le système.
Précision Stabilité Rapidité
Tracker Solaire Page 47
Tracker Solaire Page 48
Chapitre II : Gisement solaire et le générateur
photovoltaïque
3.3.2. Modèle mécanique du tracker
L'objectif de la modélisation de la partie
mécanique est de calculer les positions angulaires en azimut et en
élévation (A, h) du tracker en fonction du
couple des moteurs, des différents étages de réduction de
vitesse ainsi que des inerties et des frottements du tracker. Pour cette
première modélisation, nous considérons que l'ensemble de
la chaine de transformation de mouvement est indéformable [13].
Le principe fondamental de la dynamique donne [13] :
[ ] ( ) E. 41
En appliquant le principe fondamental de la dynamique :
? ?? ( ) E. 42
On obtient la relation suivante :
( )
E. 43
Les coefficients feq, Jeq et Cr
sont respectivement le coefficient de frottement équivalent
du système mécanique, l'inertie équivalente de l'axe
considéré ramenée à l'arbre du moteur et le couple
résistant. L'expression de la vitesse mécanique du tracker est la
solution de l'équation fondamentale de la dynamique après passage
au domaine de Laplace :
( ) ( )
( ) E. 44
Avec
Le coefficient mecest la constante de temps
mécanique.
La position est calculée en intégrant la vitesse
mécanique et en prenant en considération les étages de
réduction.
Le calcul de la vitesse mécanique du moteur basé
sur l'équation est précédé par une estimation de
l'inertie équivalente ramenée au moteur, des coefficients de
frottement et d'un calcul du couple résistant.
L'expression de l'inertie équivalente ramenée au
moteur est déterminée à partir de l'expression de
l'énergie cinétique :
E. 45
Le coefficient de frottement équivalent ramené au
moteur est déterminé à partir de l'équation :
E. 46
3.3.3. Calcul de l'inertie du tracker azimut et
élévation
a) L'axe d'élévation
Chapitre II : Gisement solaire et le générateur
photovoltaïque
Pour l'axe d'élévation, les paramètres
concernés pour calculer l'inertie sont montré par la figure
IV.14.
|
Dimensions du plateau
Longueur= 4 m Hauteur= 2 m Epaisseur= 0.25 m Poids total = 480
kg
|
Tracker Solaire Page 49
Fig. IV. 14 Inertie du panneau
(Elévation).
b) Calcul d'inertie
On calcule l'inertie de l'axe d'élévation par la
relation suivante [19] :
? ? ( )
E. 47
c) L'axe d'azimut
La figure IV. 15montre les parties concernées pour
calculer l'inertie.

Fig. IV.15 Inertie du panneau (azimut).
d) Calcul d'inertie
? ? ( )
E. 48
3.3.4. Relation entre la position angulaire et la course du
vérin

Fig. IV.16 Schéma des paramètres de
calcul.
Chapitre II : Gisement solaire et le
générateur photovoltaïque
Calcul de la course du vérin [19] :
X = XO -- ( h * cos (elévation) + C2 -- ( e
+ h * sin(elévation)2)) E. 49
X0 : Position du vérin par rapport à l'état
initial.
X = + 2+e2
0
X : sortie du vérin par rapport à sa position
initiale.
3.3.5. Estimation du couple résistant
Le couple résistant est supposé nul pour le
mouvement en azimut (Cr Azimut =0), car ce mouvement n'est pas
influencé par la gravité et en adoptant l'hypothèse qu'il
n'y a pas d'efforts externes (perturbation). Pour le mouvement en
élévation, le couple résistant évolue avec l'angle
d'élévation du tracker. L'expression du couple résistant
est donc écrite sous la forme suivante [13]:
(elévation) * d E. 50
Avec mplateau+modules, g et d sont
respectivement la masse du plateau et des modules, l'intensité de la
pesanteur (9,81 m/s2) et la distance entre le centre de
gravité et le centre de la rotation.
3.3.6. Modélisation et simulation du modèle
dynamique
Il s'agit dans ce volet de faire la simulation du
modèle dynamique d'un moteur asynchrone, ainsi on est amené
à élaborer l'ensemble des équations qui
caractérisent ce modèle et l'implanter sur MATLAB et plus
précisément sous son module de simulation SIMULINK (Figure. IV.
17).
L'interface principale du simulateur ainsi que les
différents blocs principaux développés sont
présentés ci-après.
a) Diagramme fonctionnel du MAS
Tracker Solaire Page 50
Tracker Solaire Page 51
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. IV.17 Modéle Interne du MAS.
La machine asynchrone présente des entrées :
? ws (1), Vds (2), Vqs
(3) : composantes de PARK et pulsation de la tension d'alimentation.
? Le couple résistant Cr (4), caractéristique de la
charge.
Les sorties suivantes sont accessibles : Ids (3),
Iqs (4) composantes de PARK du courant moteur, Ce
(6) : couple moteur (Ce) et w (7) vitesse de rotation.
b) Démarrage direct du moteur
Il faut encore réaliser la transformée
de PARK du réseau d'alimentation pour l'appliquer au
schéma fonctionnel du moteur et calculer l'angle 8ypar
intégration decoy.
La transformation de PARK inverse permet de revenir aux
grandeurs réelles de la machine (courant I dans notre cas). C'est ce qui
est présenté dans le schéma suivant (figure IV. 18) :

Fig. IV. 18 Modèle en bloc Simulink de la MAS
alimentée en tension.
Chapitre II : Gisement solaire et le générateur
photovoltaïque
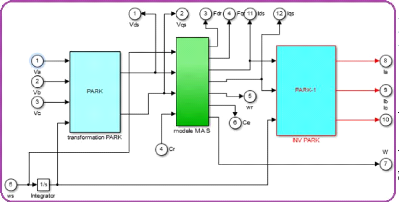
Fig. IV. 19 Le schéma interne de MAS modèle
dq.
Le bloc MAS correspond à la
modélisation faite plus haut. Sources sinusoïdales
triphasées est une source triphasée
équilibrée de tension de valeur efficace 230 V et de
fréquence 50 Hz. PARK permet de calculer les
composantes de PARK du réseau de tension et PARK-1
permet de reconstituer les courants absorbés par le moteur
à partir de ses composantes de PARK. L'intégrateur
permet d'obtenir sà partir de l'intégration de
wS.
c) Résultats de la modélisation
La simulation du modèle présenté dans la
figure IV. 18 donne des réponses en boucle ouverte de la machine
asynchrone à vide comme la figure IV. 20 suivante:
Tracker Solaire Page 52
Tracker Solaire Page 53
Chapitre II : Gisement solaire et le
générateur photovoltaïque

Fig. IV. 20 Les Résultats de la simulation du
démarrage à vide du moteur asynchrone.
L'oscillogramme de la figure IV. 20 représente
l'évolution du courant, de la vitesse et du couple au démarrage
d'un moteur asynchrone à vide. On note un appel d'un fort courant
à la mise sous tension ; la valeur instantanée de ce courant peut
atteindre trois fois le courant nominal pour le cas étudié. Des
oscillations de couple apparaissent et peuvent atteindre trois fois le couple
nominal, après disparition du régime transitoire, le couple tend
vers zéro puisque le couple résistant et nul.
? Remarque : Le démarrage à vide et sous tension
nominale permet un
établissement rapide de la vitesse et un couple
électromagnétique instantané. L'application d'une charge
introduit une chute de vitesse.
Lorsque la charge est appliquée, le couple
électromagnétique répond instantanément et la
vitesse est légèrement perturbée. La commande en courant
donne une réponse à fort dépassement pour le couple
électromagnétique par conséquent il est
déconseillé de l'utiliser dans un système à boucle
ouverte pour des raisons de stabilité.
3.4. Commande scalaire
Cette technique est facile d'implantation, moins
coûteuse donnant aussi des performances statiques acceptables plusieurs
commandes scalaires existent selon que l'on agit sur le courant ou sur la
tension. Elles dépendent surtout de la topologie de l'actionneur
utilisé (onduleur de tension ou de courant) et pour notre cas on a
utilisé l'onduleur de tension alimentant la machine asynchrone
commandée par une commande scalaire
(V/f)=cst (Figure IV. 21).
Chapitre II : Gisement solaire et le générateur
photovoltaïque
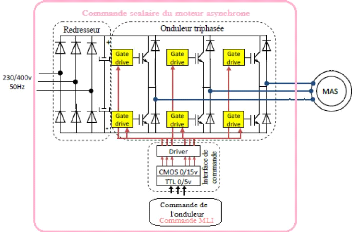
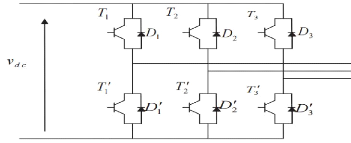
Tracker Solaire Page 54
Fig. IV. 21 Commande scalaire du moteur asynchrone [22].
3.4.1. Contrôle en V/f de la machine
asynchrone
Son principe est de maintenir V/f = Constant
ce qui signifie garder le flux constant. Le contrôle du couple se fait
par l'action sur le glissement. En effet, d'après le modèle
établi en régime permanent, le couple maximum s'écrit :
( ) E. 51
On voit bien que le couple est directement proportionnel au
carré du rapport de la tension sur la fréquence statorique
[23].
3.4.2. Modélisation de l'onduleur triphasé
La figure IV. 22 présente le schéma d'un onduleur
triphasé alimentant le MAS [24].
Fig. IV. 22 Le schéma d'un onduleur triphasé
alimentant le MAS.
L'onduleur de tension triphasé se compose de trois bras
identiques. Chaque bras composé de deux cellules comportant chacune une
diode et un transistor. Tous ces éléments sont
considérés comme des interrupteurs parfaits
[24]. Alors l'onduleur de tension peut être
représenté dans le cas idéal sous la forme suivante dans
la figure IV.24.
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Tracker Solaire Page 55
Fig. IV. 23 Schéma équivalent de
l'onduleur.
L'onduleur est modélisé en associant à
chaque bras une fonction logique F qui détermine son état de
conduction [24] :
{
1 si Icifermé et Ici' ouvert Avec i=1,
2, 3.
0 si Ici'fermé et Ici ouvert L'expression
sous forme matricielle des tensions simples de l'onduleur au
moyen des fonctions logiques de connexions est obtenue à
partir des équations :
(Vas(2 --1 --1 F1
Vbs = v3c--1 2 --1 F2 E. 52
Vcs --1 --1 2 F3
Vdc: C'est la tension d'alimentation continue de
l'onduleur.
Le modèle (E.52) peut être représenté
sous Simulink par le schéma suivant figure IV. 24 :

Fig. IV. 24 Modèle de l'onduleur
triphasé.
La figure VI. 25 suivante illustre la forme des tensions obtenus
à la sortie de l'onduleur.
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. IV. 25 La sortie d'onduleur triphasé.
3.4.3. Les Techniques de commande de l'onduleur
triphasé On distingue les trois types de commandes :
? Commande 180° chaque transistor est commandé
pendant 180°. Les commandes de deux transistors d'un même bras sont
décalées de 120° par rapport aux transistors du bras
voisin.
? Commande 120° elle est identique à celle d'un
pont triphasé à thyristors. Chaque transistor conduit pendant le
120°, ce qui correspond à une zone vide de 60° entre la
commande de deux transistors d'un même bras.
? Commande MLI, la modulation de largeur d'impulsions (MLI),
est une technique couramment utilisée pour synthétiser des
signaux continus à l'aide de circuits à fonctionnement tout ou
rien, ou plus généralement à états discrets.
Dans notre projet on a choisi l'utilisation de la commande
MLI.
3.4.4. La modulation de largeur d'impulsions
Commande de l'onduleur par modulation de largeur d'impulsion
(MLI) (Figure IV. 26) permet de convertir une tension de
référence appelée modulante en une tension sous forme de
créneaux, le principe de la MLI consiste à comparer le signal de
référence (modulante), à un signal porteur (triangulaire)
de fréquence supérieure. Cette commande utilisée afin
d'atténuer certaines harmoniques de la tension, on module les largeurs
des impulsions. Cette technique permet d'éviter l'emploi d'un filtre
encombrant et onéreux en sortie de l'onduleur [24].
Tracker Solaire Page 56
Tracker Solaire Page 57
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. IV. 26 Modèle Simulink de la commande
MLI.
Le signal de sortie de notre système qui va servir
à commander les instants de
commutation des interrupteurs de l'onduleur triphasé
est présenté par la troisième courbe de la figure IV.
27.

Fig. IV.27 Le signal de sortie de la commande MLI.
Le signal de sortie (modulée) vaut 1 si la modulante est
plus grande que la porteuse et 0
sinon, le signal de sortie change donc d'état à
chaque intersection de la modulante et de la porteuse.
3.4.5. Modélisation de la commande scalaire
La figure IV. 28 montres l'implémentation de la
commande V/f constante de la machine asynchrone avec générateur
de tension de commande.
Tracker Solaire Page 58
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. IV.28 Modèle dynamique du MAS asservie en
position.
a) Résultats de simulation
La figure IV. 29 présente la simulation du modèle
électromécanique du tracker :

Fig. IV. 29 Les résultats de simulation.
D'après la figure IV. 29la vitesse suit correctement la
référence et le rejet de perturbation est rapide sans
oscillations.
Chapitre II : Gisement solaire et le générateur
photovoltaïque
Tracker Solaire Page 59
Le couple présente des fluctuations à chaque
variation de régime. Les performances sont acceptables. La variation de
la vitesse en charge est lente et le couple est très fluctué. La
réponse indicielle ainsi obtenue est donnée à la figure
IV. 30 qui montre que le tracker atteint sa position de référence
(1°) et le temps de réponse est moins de 2s.

Fig. IV. 30 Réponses indicielles d'un axe du tracker
asservi en position.
4. Commande et stratégie de
génération de trajectoire d'un tracker
L'unité de commande est un dispositif programmable
pour coordonner les modes de fonctionnement, ainsi que la stratégie de
contrôle pour positionner le système selon l'algorithme de
position solaire. Dons notre cas nous avons procédé par une
programmation en langage mikroC et par une simulation sous ISIS.
L'élément de base du montage est le
microcontrôleur 18F458 de la famille des PIC Midrange et architecture
RISC (35 instructions de durée 1ou 2 cycles) avec une consommation moins
de 2mA sous 5V et 4MHZ [25]. Cette partie est
développée dans le chapitre suivant.
5. Conclusion
Ce chapitre décrit les différentes parties de
conception du suiveur solaire et son principe de fonctionnement. Une simulation
a été menée pour mettre en évidence la partie
dynamique du suiveur, dans cette partie nous avons simulé la commande
scalaire du MAS avec un contrôleur PID sous MATLAB, puis une simulation
virtuelle du suiveur en boucle ouverte basée sur les équations
astronomiques a été effectuée. Sur la partie
mécanique, nous avons généré un modèle sous
SolidWorks. Enfin, nous avons élaboré la commande du suiveur
basé sur le microcontrôleur PIC 18F458.
Tracker Solaire Page 60
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Chapitre V : Test et simulation de
la Commande du tracker
1. Introduction
Cette dernière étape est consacrée
à l'implémentation matérielle, tests et simulations de la
technique adoptée dans cette étude, c'est la partie
électronique qui va assurer la commande de tout le système. Pour
ce faire, il est indispensable d'identifier la technologie choisie ainsi que
les blocs qui seront utilisés (Figure V. 1). Notre choix s'est
porté sur l'utilisation du microcontrôleur PIC comme un circuit
intégré pour l'exécution du programme qui seront traduits
en langage C, bien que d'autres cartes puissent être utilisées
aussi. Une présentation de l'environnement logiciel est
éventuellement décrite dans ce chapitre, expliquant la
procédure adoptée pour une simulation en temps réel de ce
projet et la description de la réalisation d'une carte de commande du
tracker solaire.

Fig. V. 1 Carte de commande d'un tracker solaire.
2. Contexte logiciel
Les microcontrôleurs sont aujourd'hui implantés
dans la plupart des grandes applications publiques ou professionnelles, il en
existe plusieurs familles. La société Américaine Micro
chip Technologie a mis au point dans les années 90 un
microcontrôleur : le PIC (Peripheral
Interface Contrôler). Ce composant encore
très utilisé à l'heure actuelle est un compromis entre
simplicité d'emploi, rapidité et prix de revient.
Dans notre cas on a utilisé le microcontrôleur
PIC 18F458 programmé avec le langage mikroC, Le mikroC est un
compilateur C complet pour PIC de Microchip. Le code source est simulé
via PROTEUS.
La figure V. 2 représente la méthodologie suivie
pour la simulation de la carte de
commande.
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. V. 2 Cheminement de la programmation et de la
simulation [1].
3. Écriture du programme
On peut distinguer deux parties dans le programme
rédigé avec mikroC le premier consiste à la commande
scalaire du moteur le deuxième programme permet de calculer la position
solaire et orienter le moteur a cette position.
? Description de l'algorithme
Dans cette stratégie et à partir des
données enregistrées au préalables le
microcontrôleur lit les variables suivantes : les données du lieu
géographique, la latitude et la longitude, la date actuelle, l'horloge
en temps réel (RTC : Real Time Clock) et les positions des angles
(élévation et azimutale du panneau : détectés via
les capteurs de position p1, p2), comme il est montré dans (chapitre 4,
la partie 3.1 ) (Méthode pour calculer la position du soleil) .puis, le
microcontrôleur calcule les paramètres et les angles suivants
:l'angle horaire, et l'angle altitude, azimut, plus Heure de lever et de
coucher.
Après avoir terminé le calcul, le
système se déplace vers l'Est si la condition (abs (p1-az) >1
et p1> azimut) est vérifiée sinon (p1< azimut) vers l'Ouest
sinon il s'arrête (la position azimutale est détectée) et
la même chose la méthode est identique pour le deuxième
moteur d'élévation avec la condition (abs (p2-altitude) > 1et
p2> altitude). Si l'horloge atteint l'heure du coucher, le système se
déplace automatiquement vers la position prévue pour l'heure du
lever le jour prochain et s'arrête pour recommencer de nouveau.
4. Description du HARDWARE
Après avoir réalisé les études
précédentes, on a pu construire un schéma de principe sur
lequel on va se baser pour réaliser la carte de contrôle.
4.1. Réalisation de la commande de l'onduleur 4.1.1.
Schéma de principe
La figure V. 3 montre le circuit de commande d'un onduleur
triphasé. Il se compose
d'une mémoire tampon (BC547 et 2N3019), d'un
opto-isolateur, d'un amplificateur Darlington et d'un driver MOSFET.
Tracker Solaire Page 61
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. V. 3 Circuit de commande d'un onduleur
triphasé. L'élément de base du montage est le
microcontrôleur PIC 18F458.
4.1.2. Circuit de l'onduleur
La figure V. 4 présente l'onduleur triphasé, il
se compose de six MOSFET connectés en trois membres. Il convertit la
liaison continue d'entrée en une tension alternative triphasée
correspondante. Le circuit de microcontrôleur et de commande de grille
sert à contrôler le temps de marche / arrêt (signal PWM) des
MOSFET dans une séquence particulière. La séquence de
conduite des MOSFET est de 1-5, 2-6, 3-4 et répétée. Dans
cette séquence de MOSFET conducteurs, chaque paire de MOSFET conduit
après chaque 120° [26] [27].
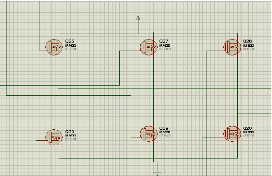
Fig. V. 4 L'onduleur triphasé avec trois
bras.
4.1.3. Gâte drives
circuit
Les signaux PWM sont utilisés pour contrôler la
vitesse du moteur. Ils sont générés par le
microcontrôleur. Ces impulsions sont données au
circuit de commande. Ce dernier fournit les signaux de grille pour
déclencher les MOSFET qui entraînent le moteur à induction
triphasé.
Tracker Solaire Page 62
Tracker Solaire Page 63
Chapitre II : Gisement solaire et le générateur
photovoltaïque
a) Circuit tampon (BC547 et 2N3019)
L'impulsion PWM générée par le
microcontrôleur PIC n'est pas capable de commander

l'opto-isolateur. Pour sur monter ce problème, le
circuit tampon est utilisé comme le montre la figure V. 5
[27].
Fig. V. 5 La structure du circuit tampon (BC547 et
2N3019).
b) Opto-isolateurs (MCT2E)
La figure V. 6 présente la structure de l'opto-isolateur.
C'est la combinaison de la diode
électroluminescente IR LED et NPN phototransistor. La
fonction principale de l'opto-isolateur est d'isoler les circuits de puissance
des circuits de commande [26] [27].
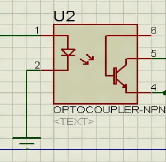
Fig. V. 6 La structure de l'opto-isolateur.
Le circuit tampon alimente le signal d'entrée de la
diode électroluminescente. La LED conduit et émet la
lumière qui attaque le phototransistor conduit.
c) Darlington pair Amplifier (TIP122)
Le TIP122 est un transistor de puissance NPN de pair
Darlington évalué comme 100V, 5A ayant un gain de plus de 1000
avec une dissipation de puissance de 50W. Il est destiné à
être utilisé dans des applications électriques,
linéaires et de commutation [26][27].
Le TIP122 est un transistor de puissance NPN de pair de
Darlington, classé comme 100V, 5A ayant un gain de 1000 avec une
dissipation de puissance de 50W. Le circuit amplificateur Darlington est
illustré sur la figure V. 7 suivante.
Tracker Solaire Page 64
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Fig. V. 7 La structure de Darlington pair amplifiée
(TIP122).
d) IR 2112
IR2110 est un MOSFET haute tension et haute vitesse
conductrice avec sortie côté gauche et côté gauche
indépendant canaux de tension (FigureV.8). Il est capable de
contrôler deux entrées en même temps et produit des
impulsions de sortie latérales élevées et secondaires. Les
entrées logiques sont compatibles avec une logique de 3,3 V. la fonction
de pilote de sortie dispose d'un stade de tampon de courant à impulsions
élevées conçu pour une section minimale du
conducteur[26] [27].
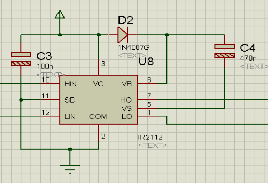
Fig. V. 8 Connexion d'IR2112.
4.2. Réalisation de la carte de commande du moteur
asynchrone
5.1.1. Étage de la puissance
Ce montage est constitué d'un relais
électromagnétique de commande et d'un contacteur pour chacun des
moteurs (horizontal/vertical).

Fig. V. 9 Description d'un relais
électromagnétique. 5.1.2. Relai
électromagnétique
Chapitre II : Gisement solaire et le générateur
photovoltaïque
Tracker Solaire Page 65
Comme son nom l'indique, il sert à faire une transition
entre un courant faible et un courant fort. Il est constitué d'une
bobine ou solénoïde qui lorsqu'elle est sous-tension attire par un
phénomène électromagnétique une armature
ferromagnétique qui déplace des contacts, voir figure
ci-dessus.
4.3. Teste de la carte
Pour tester la carte de notre projet et pour visualiser les
signaux de commande de l'onduleur nous avons branché un oscilloscope. La
figure suivante représente les signaux PWM.
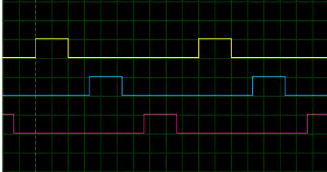
Fig. V. 10 Les signaux PWM.
5. Conclusion
Ce chapitre présente les résultats finaux de
l'implémentation matérielle de la technique de poursuite
étudiée lors de ce projet ainsi que les différentes
étapes et la méthodologie de la programmation et
l'implémentation. Ensuite, nous avons décrit les
différents composants utilisés dans la carte de contrôle
soit pour la commande de l'onduleur ou bien la commande des moteurs
d'élévation et d'azimut.
Chapitre II : Gisement solaire et le générateur
photovoltaïque

Conclusion générale et
Perspectives
Dans ce rapport une étude de modélisation,
simulation et commande d'un tracker a été
présentée. L'objectif était de proposer et de
développer un modèle permettant d'améliorer le rendement
d'un module photovoltaïque, et de réduire les coûts de
conception et développement de la commande. Afin de valider et de tester
les performances de ce modèle, un simulateur de tracker a
été développé.
? Synthèse des travaux
réalisés
Dans un premier temps, nous avons présenté le
gisement solaire, puis un bref historique sur l'énergie solaire et
l'énergie photovoltaïque ainsi que l'évolution de son
utilisation est décrites. Ensuite, nous avons présenté
l'algorithme qui permet de calculer la position solaire, en citant par la suite
les différents types du tracker avec leurs avantages et leurs
inconvénients.
La conclusion tirée de cette étude
bibliographique concerne l'utilisation du capteur solaire très
répandue dans le cas de commandes hybrides ou en boucle fermée.
L'élimination du coût supplémentaire de ce capteur
constitue donc un des objectifs de notre travail.
La deuxième partie du présent rapport a
été consacrée au développement d'un simulateur de
tracker. Puis, une description de chaque bloc ou sous modèle constituant
ce simulateur a été présentée. Un modèle de
soleil a ensuite été proposé permettant de
générer, par calcul astronomique, la trajectoire théorique
du soleil à viser par le tracker. Le modèle permet aussi de
générer les données d'ensoleillement en fonction de la
date, de l'heure et les coordonnées GPS du tracker. Les résultats
obtenus avec notre modèle sont comparés avec les données
issues de la base de données de green énergies Park.
Nous avons ensuite développé un modèle
électromécanique asservi en position du tracker basé sur
la modélisation d'une machine asynchrone contrôlée en
boucle ouverte par un variateur de vitesse et sur un modèle rigide de la
structure mécanique du tracker. Classiquement, cette modélisation
dynamique est proposée dans le repère diphasé de Park
associée à un modèle de variateur de vitesse basé
sur la commande scalaire.
? Perspectives
Les activités de modélisation et de commande du
tracker doivent être prolongées et validées sur une
installation réelle en exploitation. Parmi les perspectives de ces
travaux, la première concerne l'amélioration de la
modélisation et le développement du simulateur du tracker.
Notamment, une deuxième version du modèle du
soleil pourrait inclure avantageusement un bloc d'estimation et de calcul de
l'ensoleillement global et direct, ou d'un modèle à
paramètres réduits basé sur les réseaux de neurones
artificiels. Par ailleurs, le contrôle des actionneurs doit être
amélioré en remplaçant la commande scalaire par une
commande vectorielle ou une commande DTC avec un asservissement de la position
et de la vitesse de la machine asynchrone. De même, un modèle
mécanique plus complet et précis permettait de mettre en
évidence les déformations mécaniques des trackers de
grandes dimensions et leurs influences sur la production des modules.
Tracker Solaire Page 66
Chapitre II : Gisement solaire et le générateur
photovoltaïque
Tracker Solaire Page 67
|
Références
[1]. BOUNOUA ZINEB, « Etude de
l'impact des aérosols sur le rayonnement solaire au sol par ciel clair
en utilisant le modèlen McClear de la méthode Heliosat-4 »
Mémoire de Projet de fin d'étude Master ESSA, FST Fes 2015-
2016
[2]. M. SLAMA Fateh «
Modélisation d'un système multi
générateurs
photovoltaïques interconnectés au
réseau électrique », Mémoire de Magister
2011-2012.
[3]. Rahmani djelloul « Analyse
d'un système de concentration solaire pour la production
d'hydrogène (cas de l'Algérie)». Mémoire
d'ingénieur d'état en électronique 2011-2012.
[4]. Jacques Teller « confort
thermique », chap.II : géométrie solaire,
mémoire à Université de Liège.
[5]. Mr : Boughoufala Mohamed «
Conception et réalisation d'un système de Suiveur Solaire
pour des systèmes photovoltaïques » Mémoire de
Magister en électronique 2010/2011
[6]. Mohamed djelloul «
Contribution de l'énergie photovoltaïque dans la performance
énergétique de l'habitat à haute qualité
énergétique en Algérie » Mémoire de
Magister 20102011.
[7].
http://www.lemonde.fr/energies/article/2016/06/01/2015-annee-record-pour-les-energies-renouvelables-dans-le-monde_4929916_1653054.html
, 2015.
[8]. AOUFI Saliha «
Modélisation et commande d'un système de pompage
photovoltaïque » Mémoire De Magister, Option : Commande
Electrique, Université Ferhat Abbas Setif-1ufas (Algérie)
2014/2015.
[9]. Benzahia Ayoub «
Réalisation d'un prototype d'un système de poursuite solaire
», Université Mohamed Khider Biskra Faculté des Sciences et
de la Technologie, Mémoire de Magister 2013 / 2014.
[10]. R. Rezoug et A. Zaatri1 «
Optimisation du rendement d'un système photovoltaïque par
poursuite du soleil », 2015.
[11]. Baccalauréat général session 2008
série s sciences de l'ingénieur ; étude d'un
système pluri technique « suiveur de trajectoire pour panneau
solaire ».
[12]. Lucas Hadjeres « LE TRACKER
SOLAIRE », Lycée Colbert, Tourcoing, article 2015.
[13]. Mohamed Aymen Sahnoun «
Contribution à la modélisation et au contrôle
de trajectoire de Trackers photovoltaïques à haute concentration
(HCPV) ». Automatique / Robotique. Ecole nationale supérieure
d'arts et métiers - ENSAM, 2015. Français. <NNT :
2015ENAM0043>. <tel-01269847>
[14]. Aghilas BRAHIMI « Etude de
performances d'un capteur solaire plan à eau », Mémoire
de Master en Mécanique et Energétique 2015-2016.
[15]. FERROUDJI Fateh « Conception
et optimisation en dynamique forcée d'un nouveau prototype de
système de suiveur solaire à deux axes »,thèse
du doctorat sciences en mécanique 2015-2016.
[16]. REDA, Ibrahim et ANDREAS, Afshin.
« Solar position algorithm for solar radiation applications. Solar
energy », 2004, vol. 76, no 5, p. 577-589
[17]. KERKOUCHE, K., CHERFA, F., ARAB, A. Hadj, et
al. « Evaluation de l'irradiation solaire globale
sur une surface inclinée selon différents modèles pour le
site de Bouzaréah». Revue des Energies Renouvelables, 2013,
vol. 16, no 2, p. 269-284.
[18]. Prinsloo, G.J., Dobson, R.T. (2015).
« Solar Tracking ». Stellenbosch : SolarBooks. ISBN
978-0-620-61576-1, p 1-542.
[19]. Salem AKKARI, Flavien LUCAS, Etienne GRENIER,
Nicolas LUCAS, Yinchao LI, Yihuan SUN, Anthony CARRATALA, «
Projet mécatronique intégrée 5A : Réalisation
d'un tracker » .
ANNEE UNIVERSITAIRE 2016- 2017
|
[20].
http://electrotechnique1.blogspot.com/p/la-machine-asynchrone.html.2017.
[21].
https://fr.wikipedia.org/wiki/R%C3%A9gulateur_PID.
2017.
[22]. Soufien Gdaim. « Commande
directe de couple d'un moteur asynchrone à base de techniques
intelligentes. Intelligence artificielle» [cs.AI]. Ecole Nationale
d'Ingénieurs de Monastir. Tunisia, 2013. Français.
<tel-01456394v2> , Submitted on 8 Feb 2017.
[23]. L. BAGHLI «
Modélisation et Commande de la Machine Asynchrone»,
2015.
[24]. DIAF YOUSSOUF, BEN ANTER DJAMAL «
Modélisation et commande d'un onduleur triphasé pilote par
mli a structure multiniveaux », PROJET DE FIN D'ETUDES de Master en
Génie électrique Filière : Génie électrique
Spécialité : Electrotechnique Industriel, 2011/2012.
[25]. PIC18FXX8 Data Sheet, 2004 Microchip Technology Inc.
[26]. Jamadar JAMADAR, B. N., KUMBHAR, S. R., GAVANE,
P. M., et al. « Design and Development of Control System for
Three Phase Induction Motor using PIC Microcontroller». IFAC
Proceedings Volumes, 2014, vol. 47, no 1, p. 807-811.
[27]. JAMADAR, B. N., KUMBHAR, Dr SR, et SUTRAVE, D.
S « PICMicrocontroller Based Speed Control of Three Phase
Induction Motor Using Single Phase Supply». IJRCSIT I ISSN, 2013, no
2319-5010 PIC.
ANNEE UNIVERSITAIRE 2016- 2017
Annexes
Annexe 1. Description de la station
météorologie
|
Le paramètre mesuré
|
Equipment de mesure
|
Photos
|
|
Global Irradiation Horizontal (GHI).
|
Pyranomètre I.
|
|
|
Irritation normale directe (DNI).
|
Pyrhéliomètre.
|
|
|
L'irradiation Diffuse horizontale (DNI).
|
Pyranomètre I.
|
|
|
Les précipitations.
|
Pluviométrie de Kipp & Zonen.
|
|
|
La température, d'humidité et de pression.
|
Capteur de Kipp & Zonen.
|
|
|
Mesure la vitesse du vent.
|
Anémomètre de Kipp & Zonen.
|
|
Annexe 2. Detaille de calcule astronomique
L'annexe suivant décrit le calcul astronomique
utilisé pour calculer la position théorique du soleil en fonction
de la date, de l'heure et des coordonnées géographique du
site.
Suivi du soleil :
ANNEE UNIVERSITAIRE 2016- 2017
Le suivi du soleil est réalisé sur la base d'un
calcul astronomique théorique de la position du soleil à partir
des
coordonnées GPS du Tracker et de l'heure UTC. Les formules
du calcul astronomique sont issues de (Meeus.J, 1998).
Calcul du jour julien
- Les calculs astronomiques sont réalisés à
partir de dates converties en jour Julien comme décrit au chapitre 7
de
l'ouvrage.
Si = 1 ou = 2 alors {
?? = ?? - 1
= + 12
?? = ??+( +(( +( /60))/60))/24
On pose = floor (D/100) et = 2 - + floor ( /4)
Y, M, D, h, m, s sont respectivement l'année, le mois, le
jour du calendrier Grégorien, l'heure UTC, la minute et la seconde.
- Le jour julien est donc calculé comme suit :
?? = floor (365.25 (?? + 4716)) + floor (30.6001 ( + 1)) + ?? + -
1524.5
Calcul de la position apparente du
soleil
La position apparente du soleil est obtenue en coordonnées
équatoriales á (Ascension Droite) et ä (Déclinaison)
à partir des équations suivantes :
· Siècle Julien J2000 = ( ?? - 2451545.0) / 36525
· Longitude moyenne du Soleil
0 = 280.46645° + 36000.76983° + 0.0003032° 2
· Anomalie moyenne du Soleil
= 357.52910° + 35999.05030° - 0.0001559° 2 -
0.00000048° 3
· Equation du Centre du Soleil
= (1.914600° - 0.004817° - 0.000014° 2) sin +
(0.019993° - 0.000101° ) sin 2M + 0.000290° sin
3
· Longitude vraie du soleil ?? = 0 + + ????
????? permet une amélioration du calcul de la
longitude vraie du soleil en introduisant les corrections suivantes :
- Corrections dues à l'action de Venus
A = 153.23° + 22518.7541°
B = 216.57° + 45037.5082°
- Correction due à l'action de Jupiter
C = 312.69° + 32964.3577°
- Correction due à l'action de la Lune
D = 350.74° + 445267.1142° - 0.00144° 2
· Inégalité de longue période
E = 231.19 + 20.20 Ä?? = 0.00134° cos ( ) +
0.00154° cos ( ) + 0.00200° cos ( ) + 0.00179° sin (??) +
0.00178° sin ( )
· Paramètre de nutation de la terre =
125.04452° - 1934.136261°
· Longitude apparente du soleil
= Revolution (?? - 0.00569° - 0.00478° sin )
· Ascension droite et Déclinaison du Soleil tan =
cos ?? sin cos sin = sin ?? sin
= 2(cos ; cos ?? sin )
= asin(sin ?? sin )
Transformation de coordonnées
ANNEE UNIVERSITAIRE 2016- 2017

La position apparente du soleil est donnée en
coordonnées équatoriales, les coordonnées dans le
repère horizontal sont obtenues grâce aux transformations
décrites dans (Meeus.J,1998). Les coordonnées du soleil dans le
repère horizontal (Azimut A et Elévation h) sont obtenues
à partir des coordonnées équatoriales (Ascension Droite
á et Déclinaison ä), des coordonnées GPS de
l'observateur (Latitude ö et Longitude L) et du temps sidéral
à Greenwich è.
· Angle Horaire Local H = 00 - L
- a
· Azimut
tanA = sin H cos H*sin
cp-tan 6*cos cp
A = atan2(cos H* sin cp -
tan 6* cos cp , sin H)
· Elévation
sin h = sin cp* sin 6 + cos cp*
cos 6* cos H , h = asin(sin cp* sin 6 + cos
cp* cos 6* cos H)
Annexe 3. Informatique sur PIC
· Les caractéristiques du PIC :
· Brochage du 16f877 :
· Structure interne d'un microcontrôleur :
· Schéma bloc de PIC :
ANNEE UNIVERSITAIRE 2016- 2017
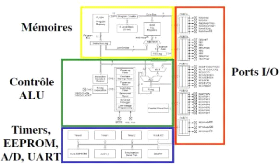
ANNEE UNIVERSITAIRE 2016- 2017
| 

